A Free-Piston Linear Generator Control Strategy for Improving Output Power




Abstract
:1. Introduction
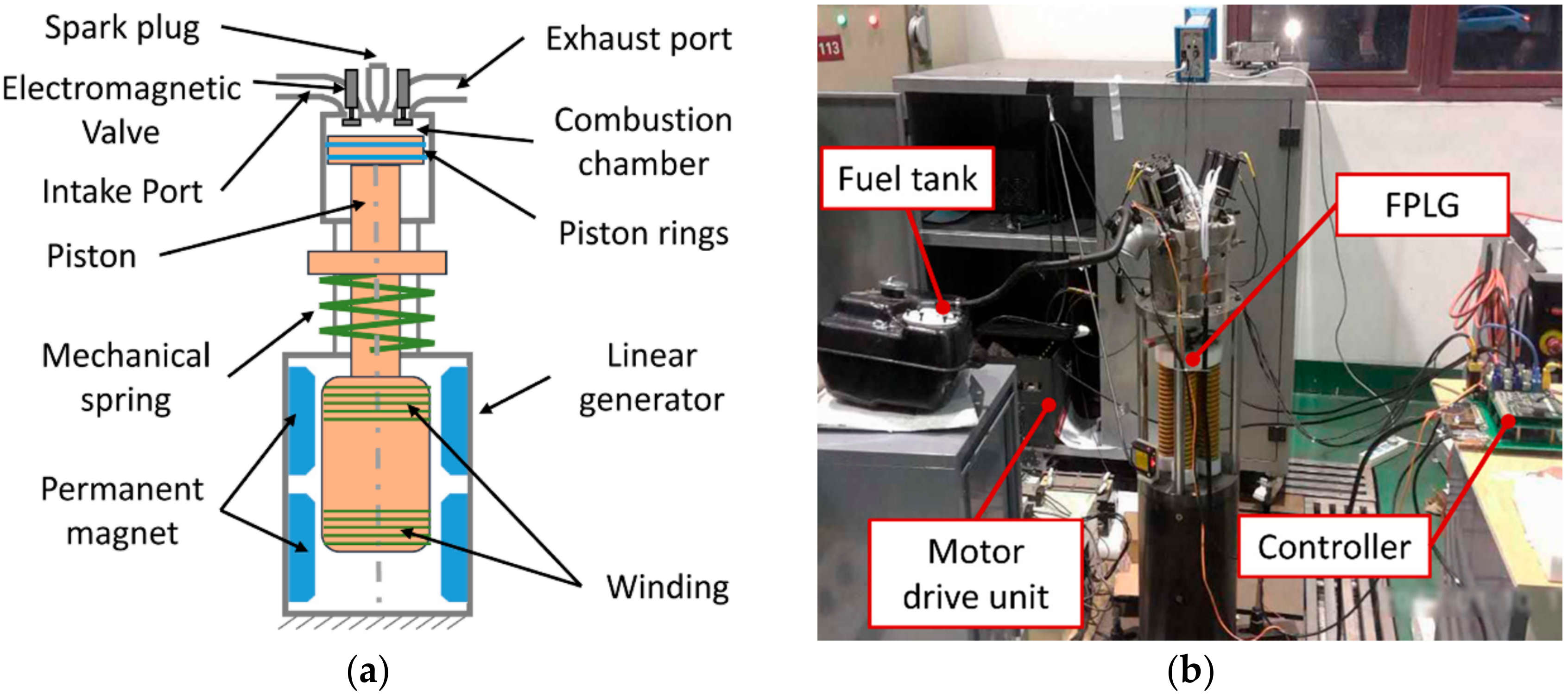
2. FPLG Configurations and Features
3. Dynamic and Thermodynamic Modeling
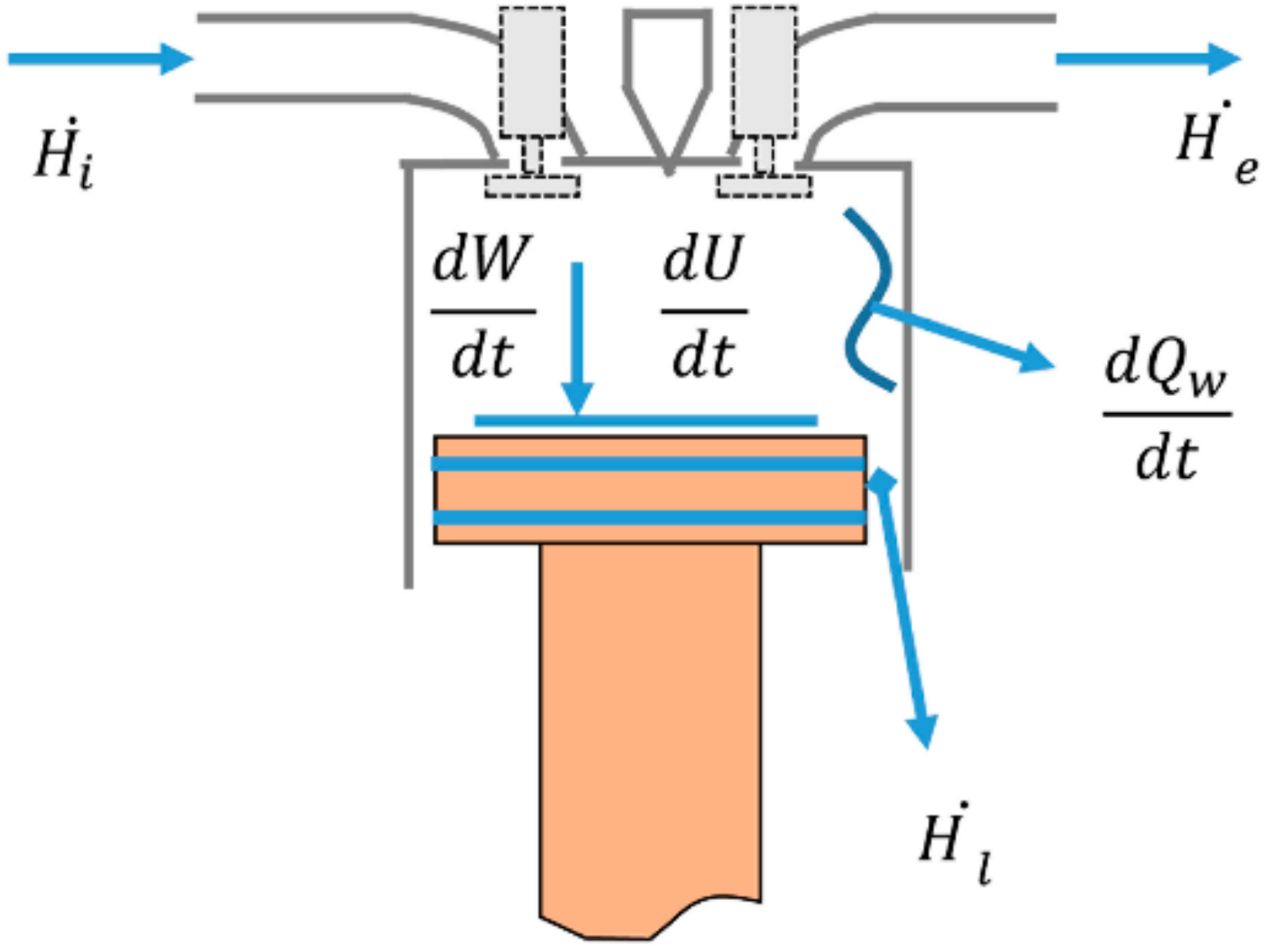
3.1. Thermodynamic Modeling of the ICE
- The working medium of the combustion chamber is regard as ideal gas, the pressure change and temperature change follow the ideal gas state equation;
- The combustion process is working in a quantitative working medium, the leakage and gas exchange losses are ignored and the power required by scavenging process is ignored.
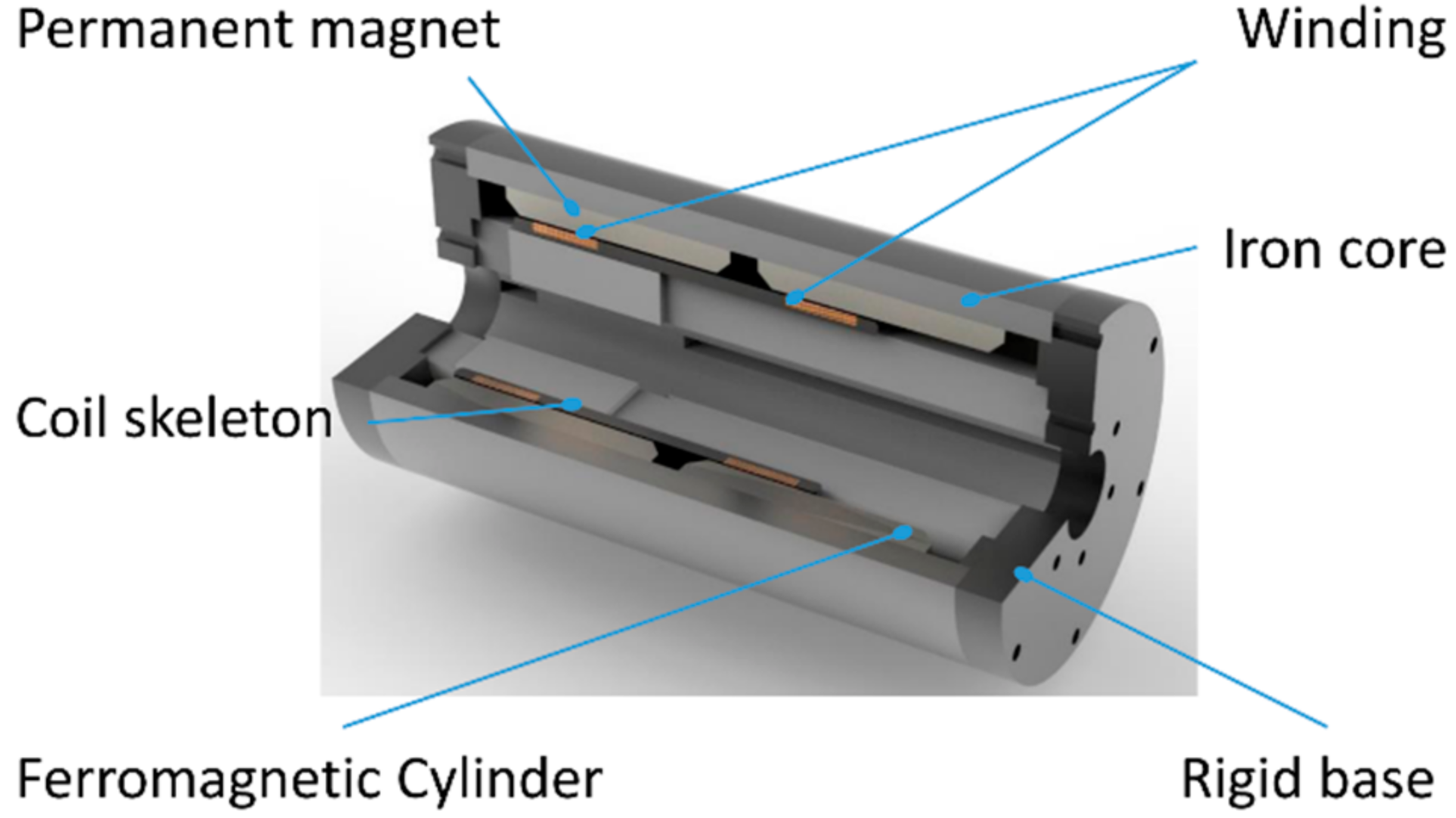
3.2. Mathematical Modeling of Linear Generator
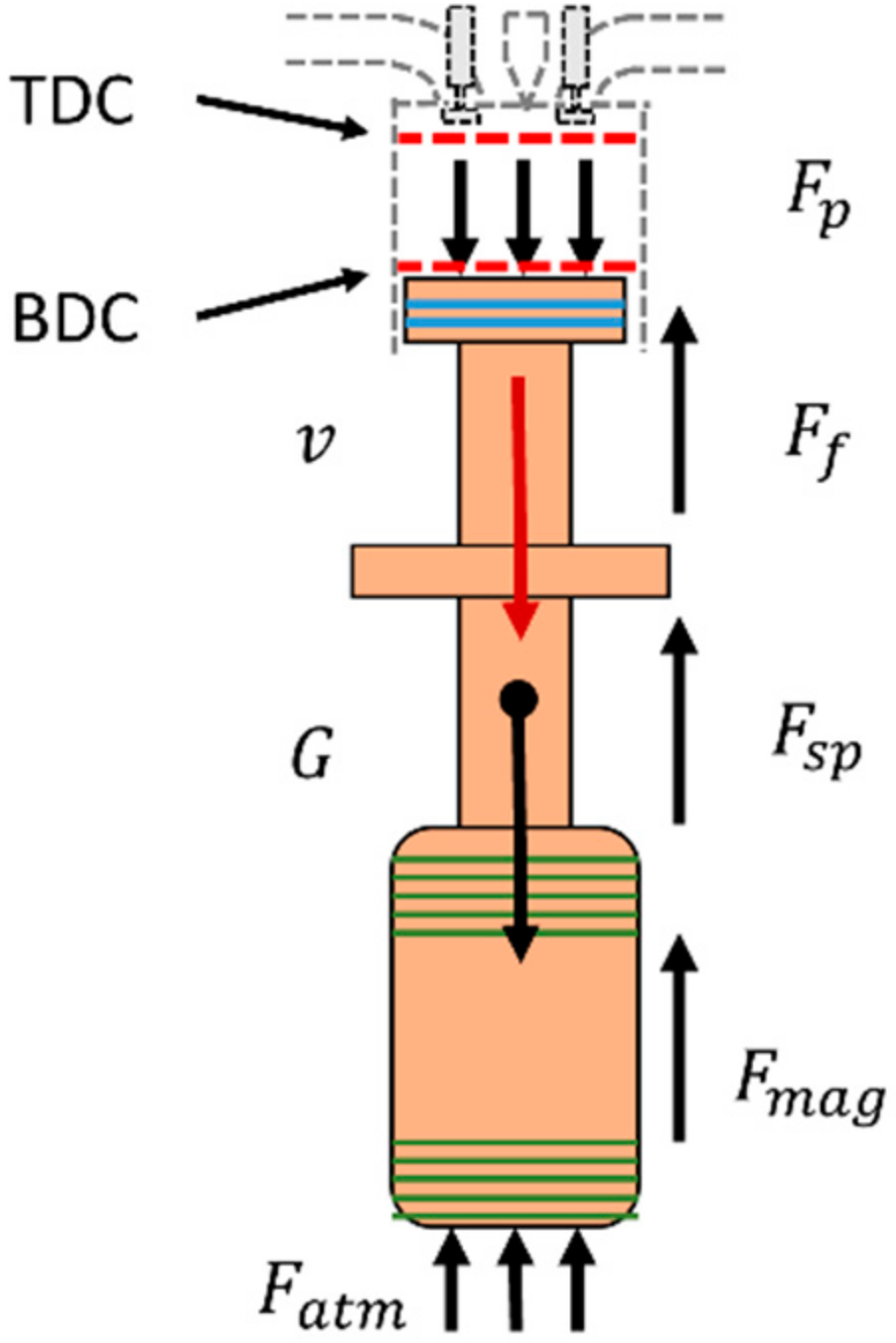
3.3. Modelling of the Rebounding Device
4. Force Control of the FPLG
5. Ladder-like Electromagnetic Force Control Strategy
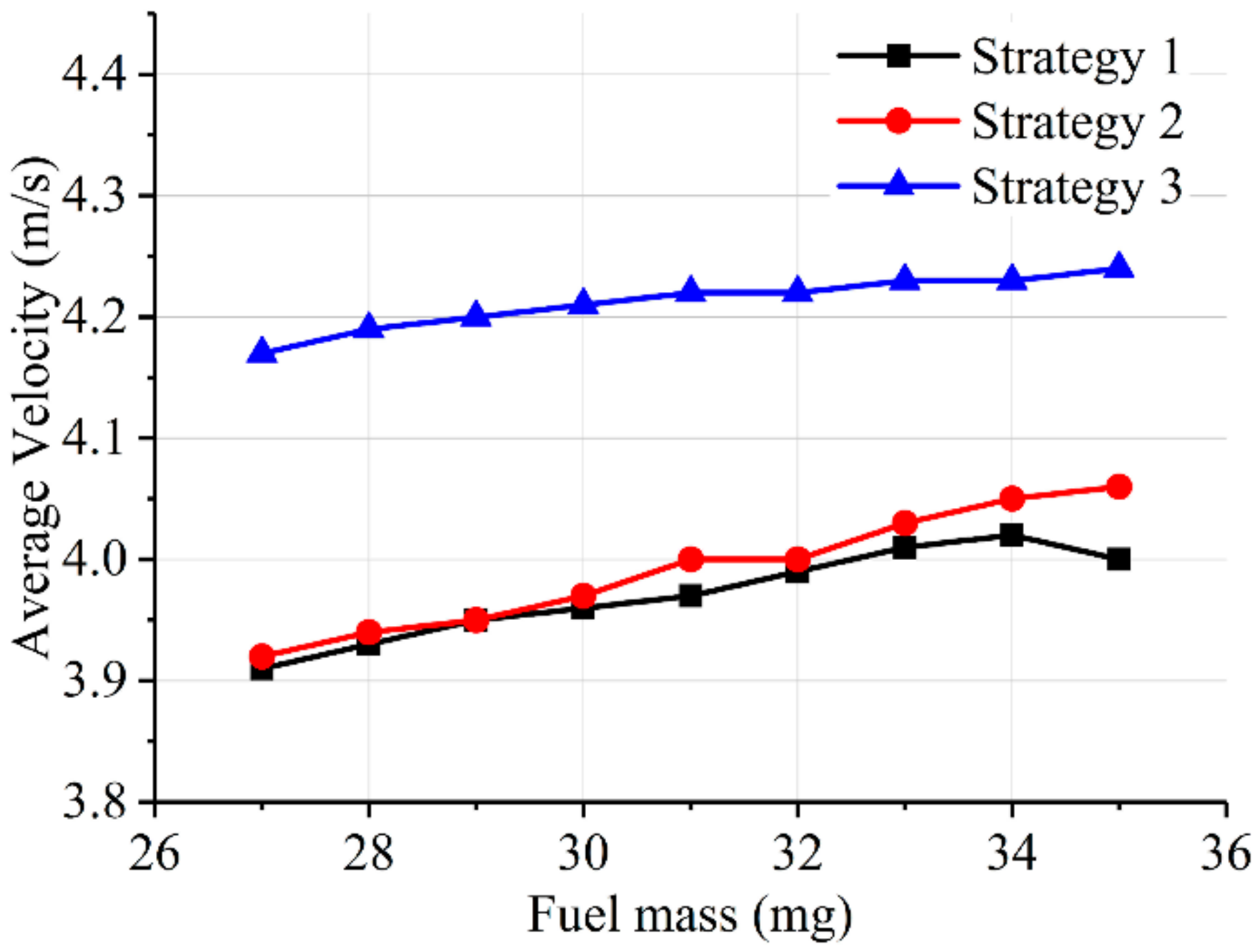
5.1. Influence Factors of Average Output Power
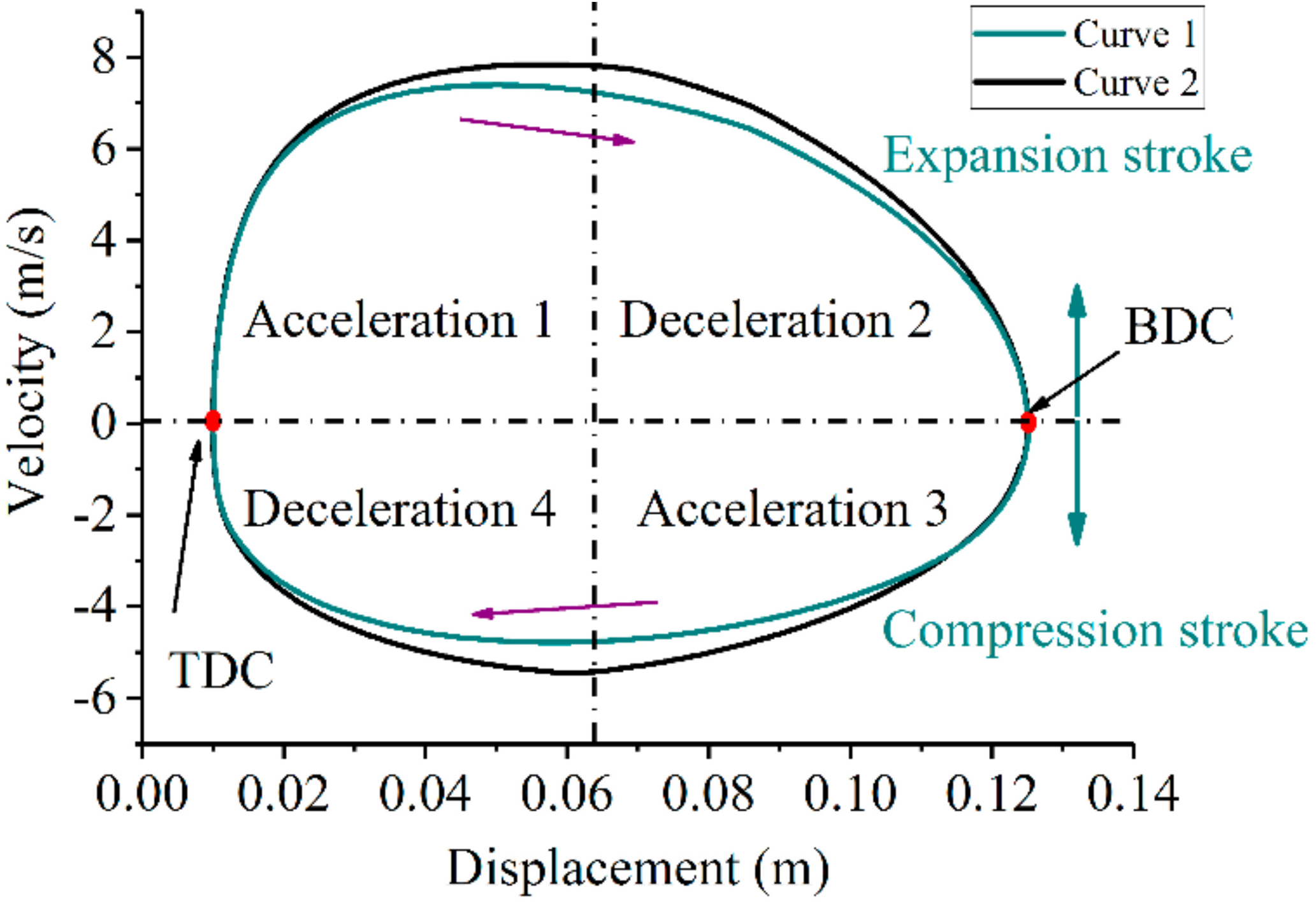
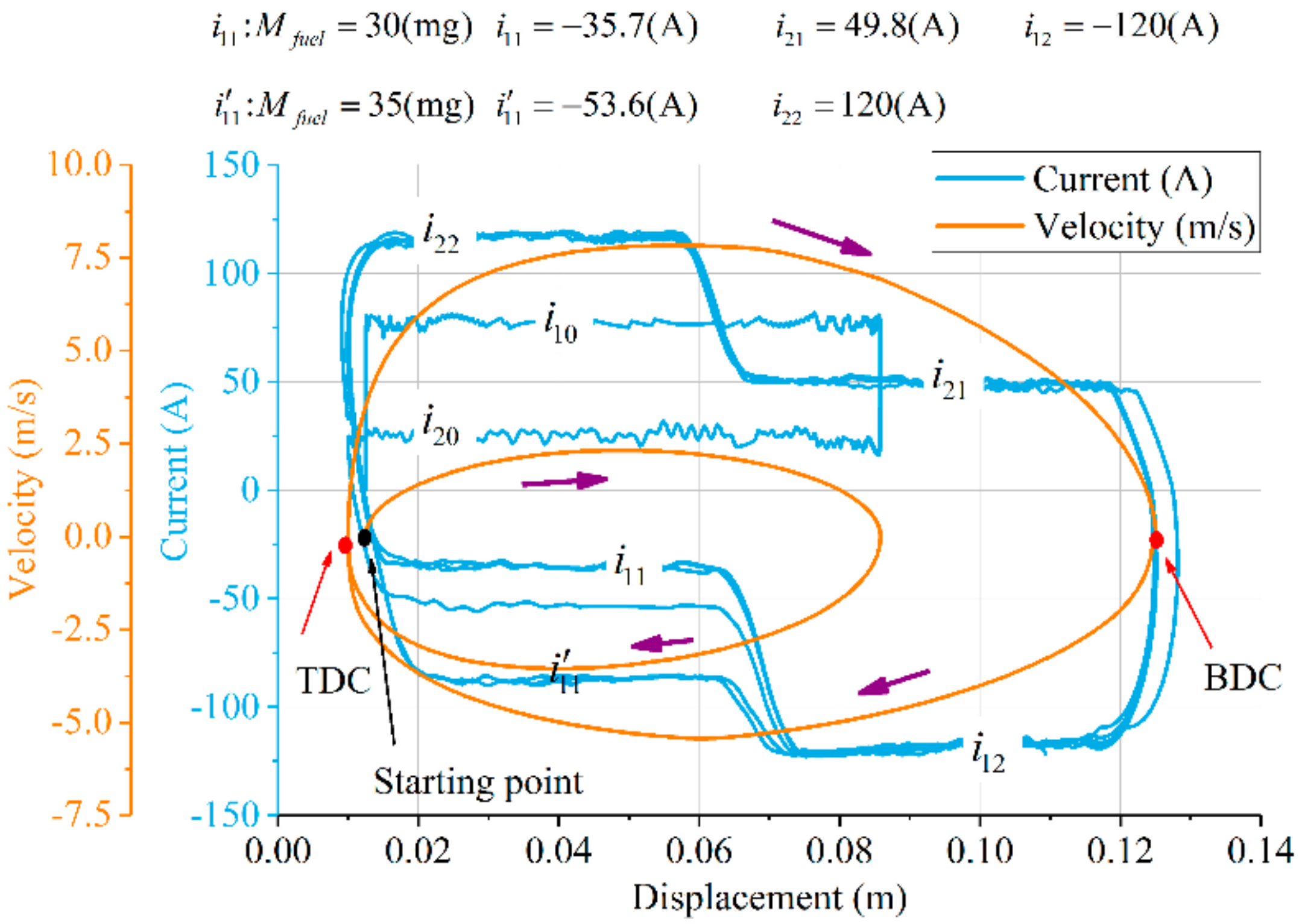
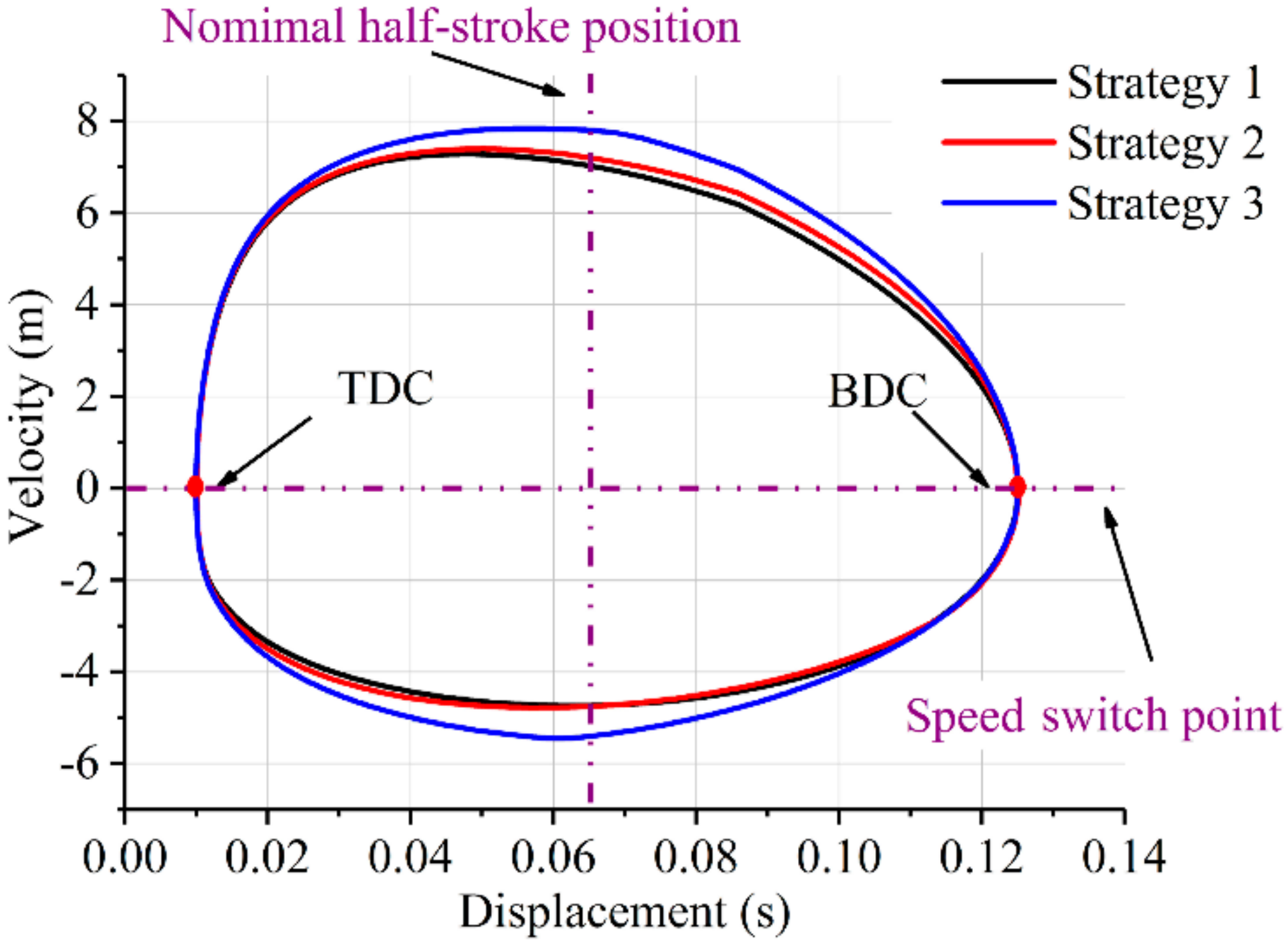
5.2. Piston Motion Characteristics Analysis
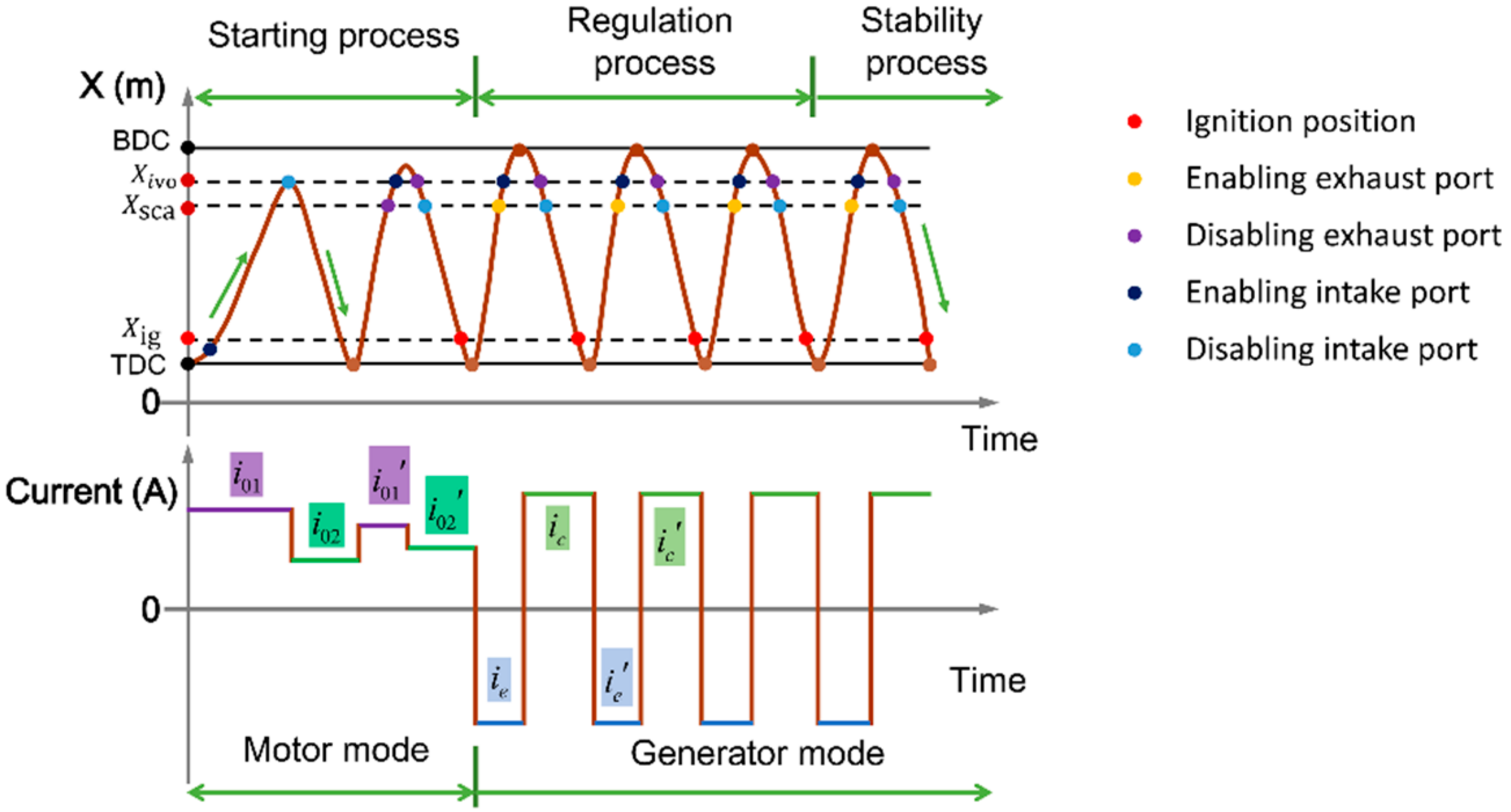
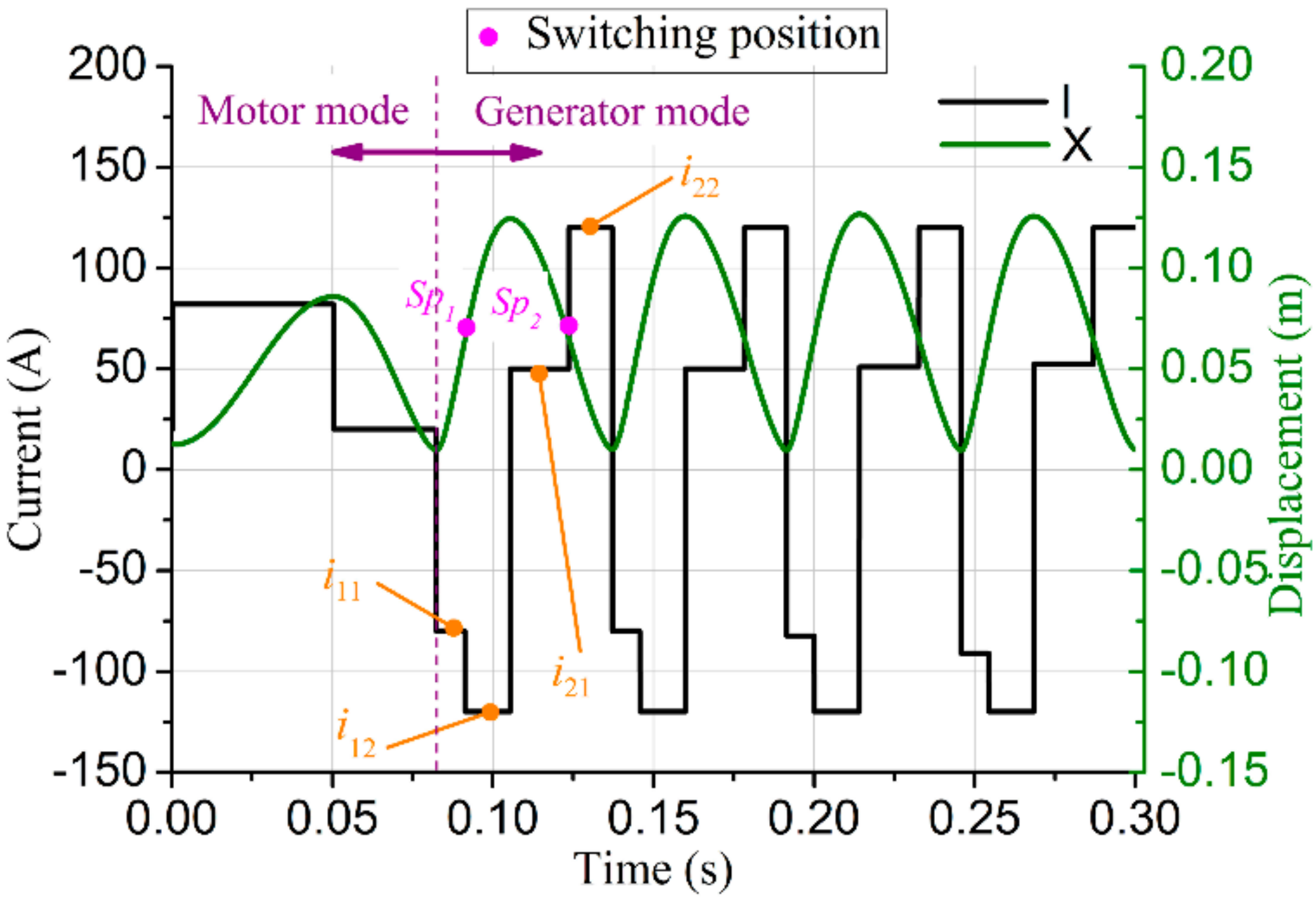
5.3. Ladder-Like Control Strategy
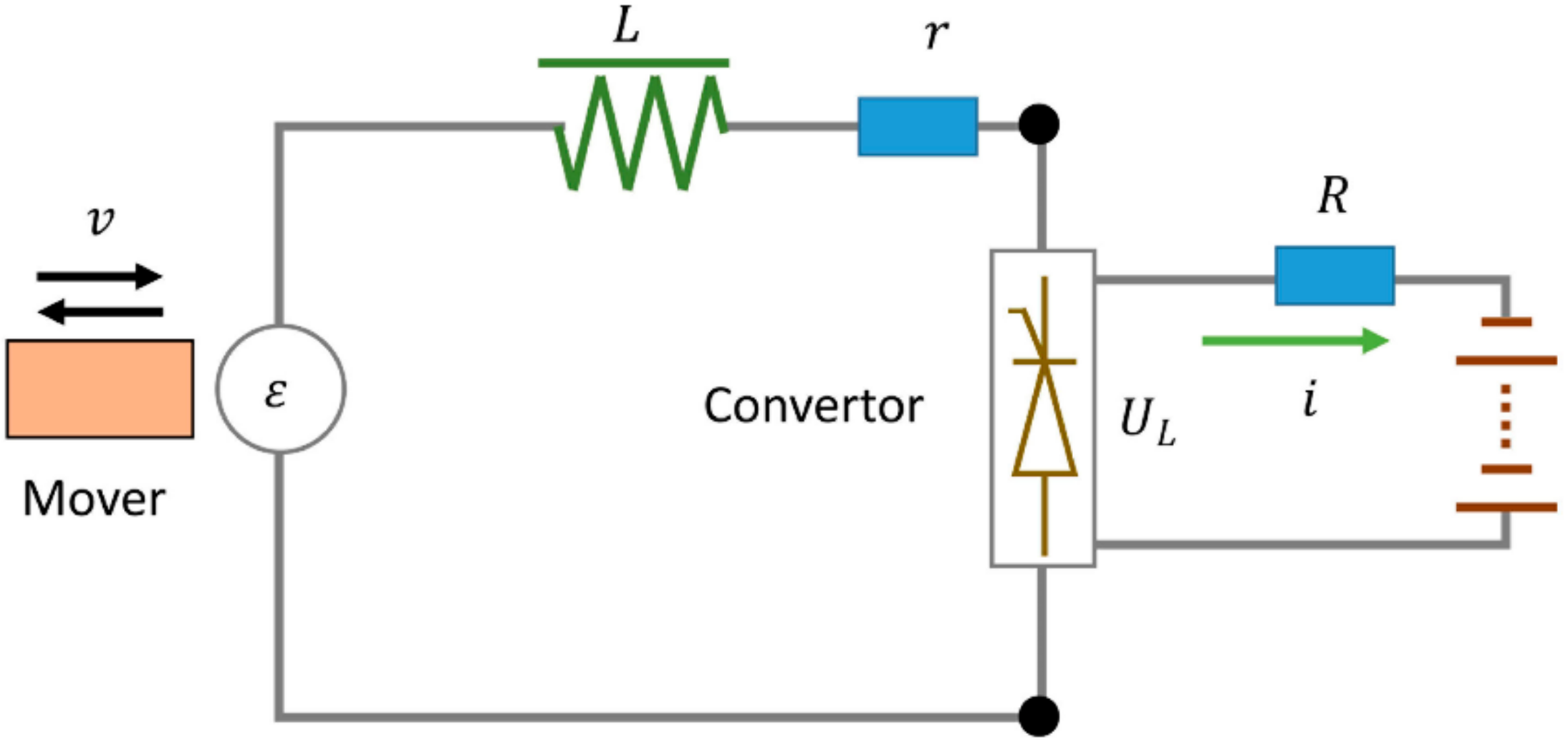
5.4. Power Amplification Circuit
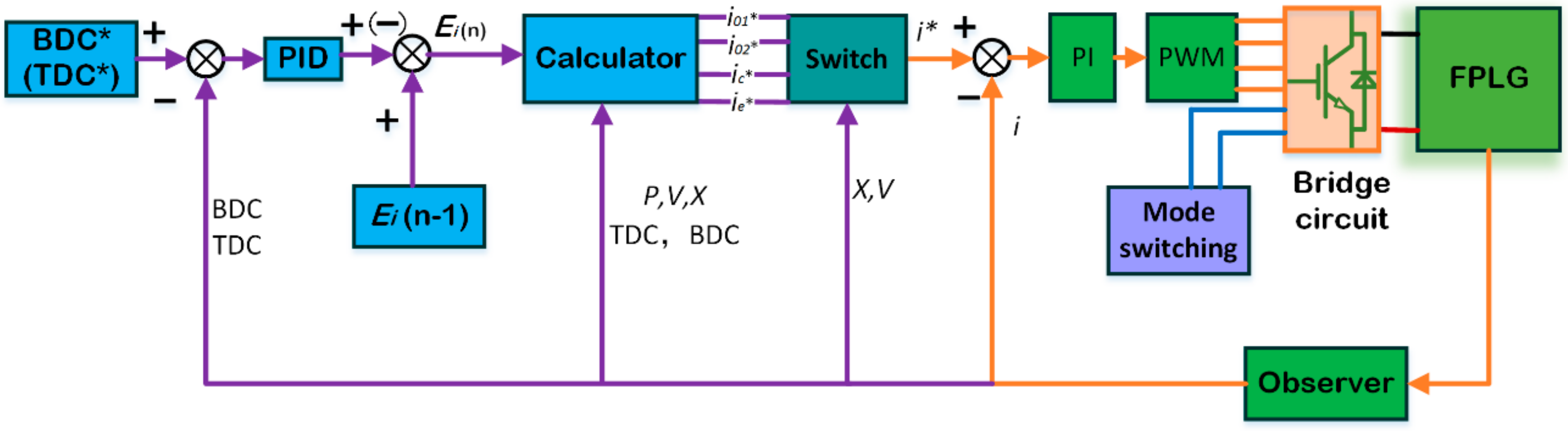
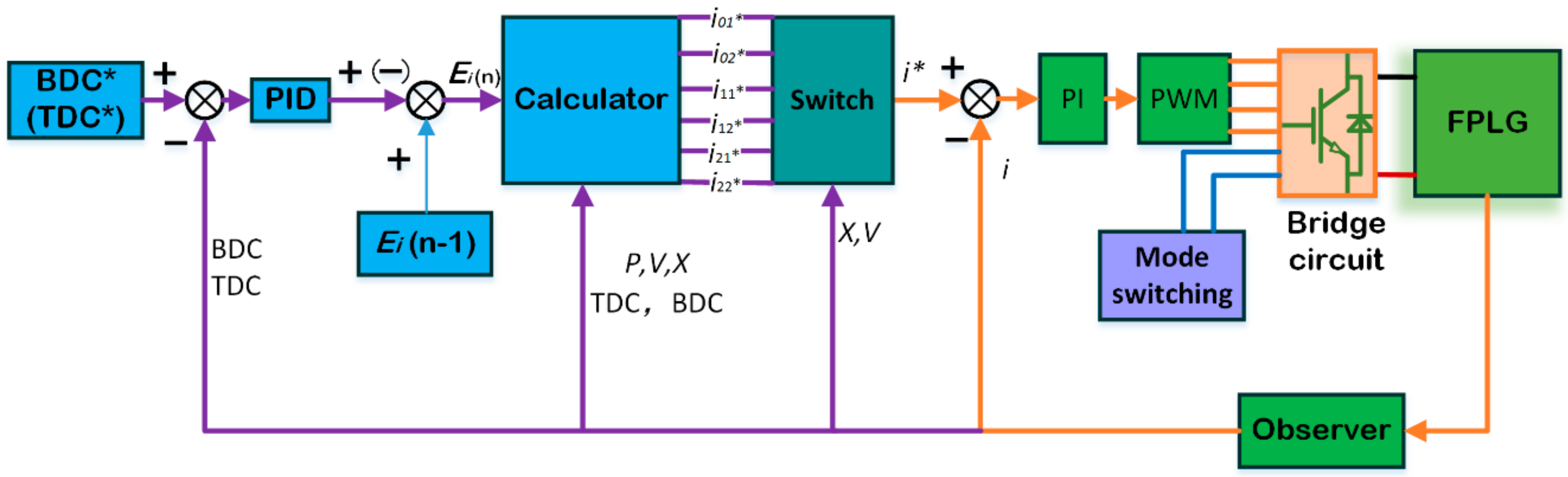
5.5. The Total Control of FPLG
6. Simulation Results
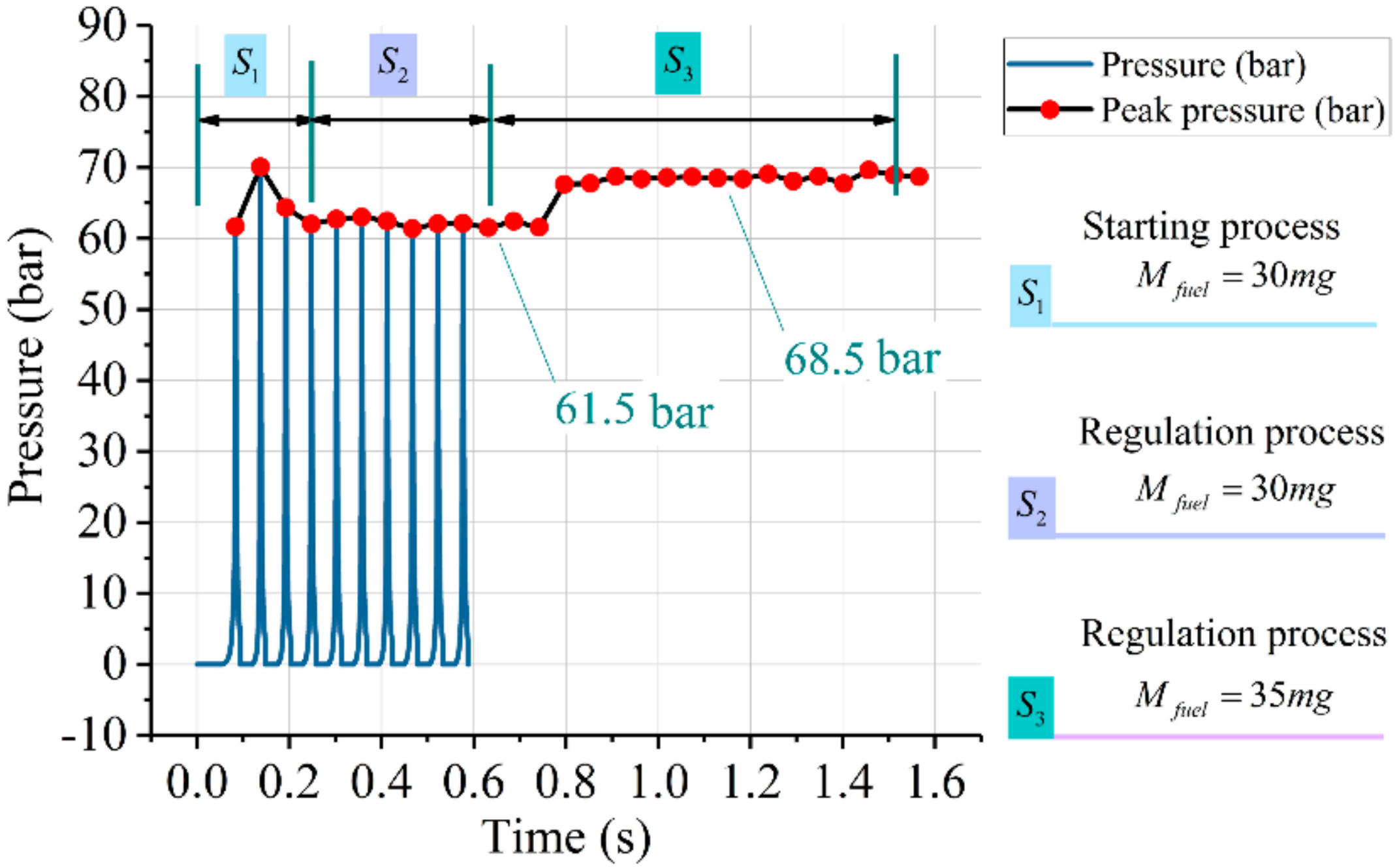
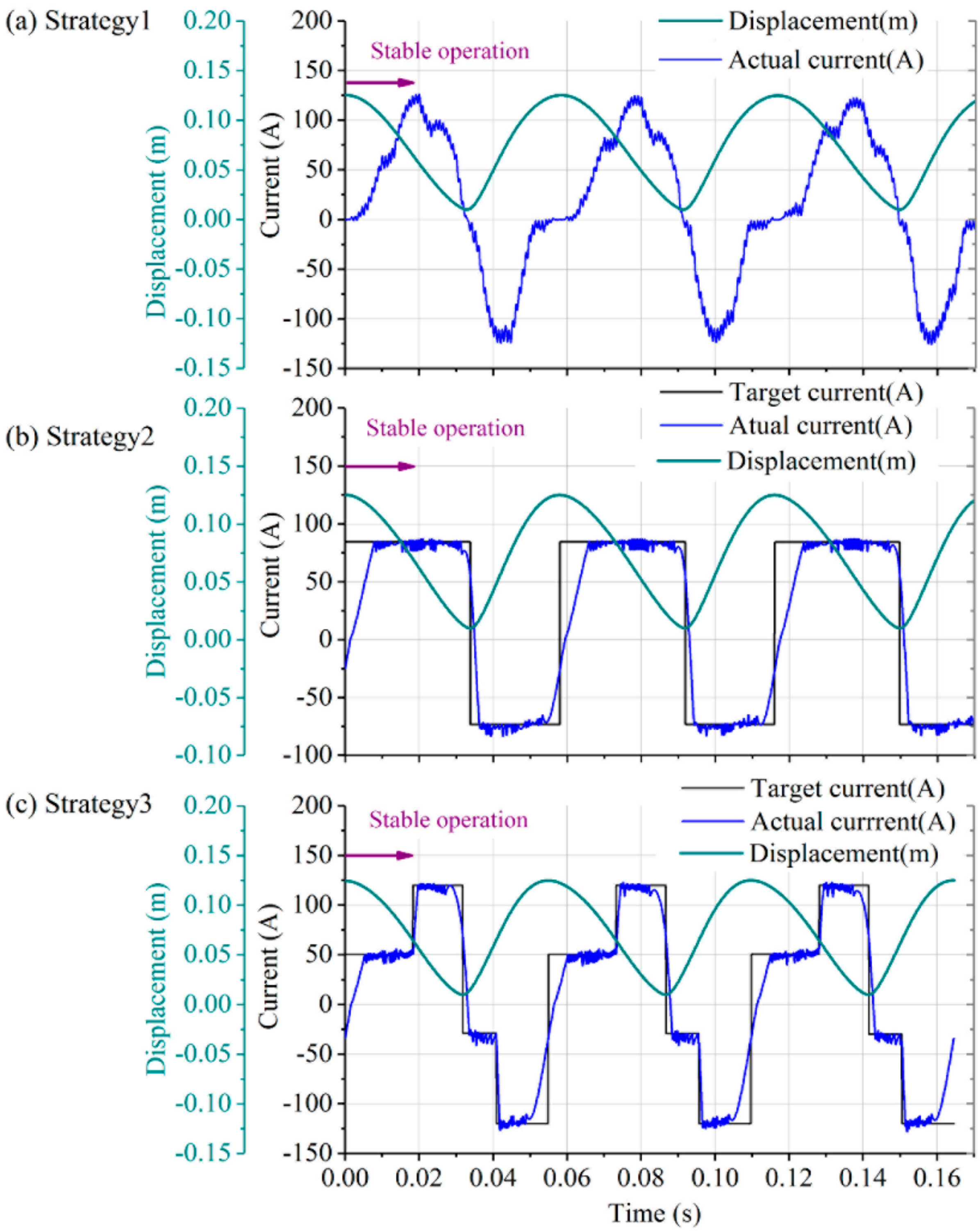
6.1. The Stability of Ladder-Like Control Scheme
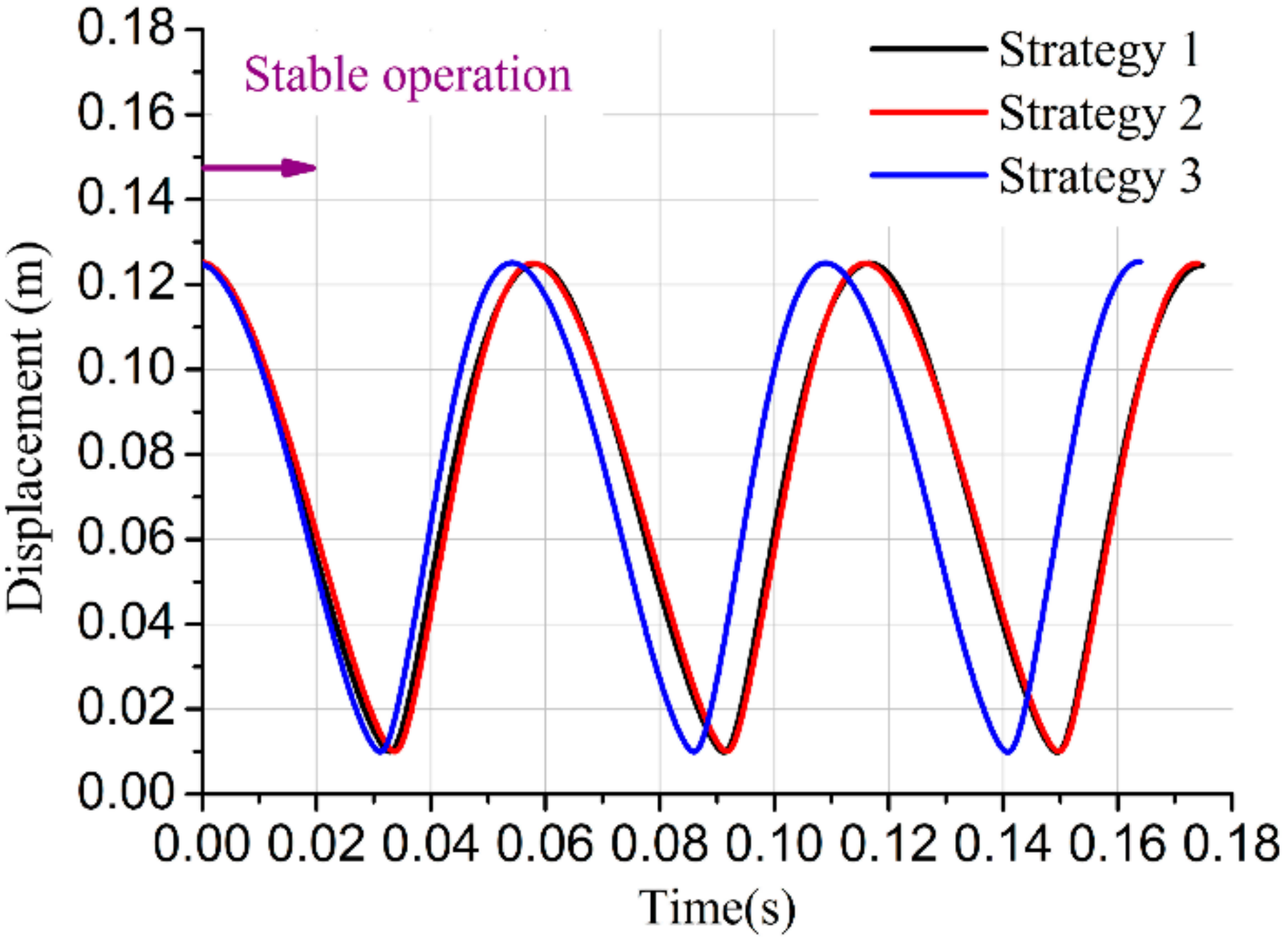
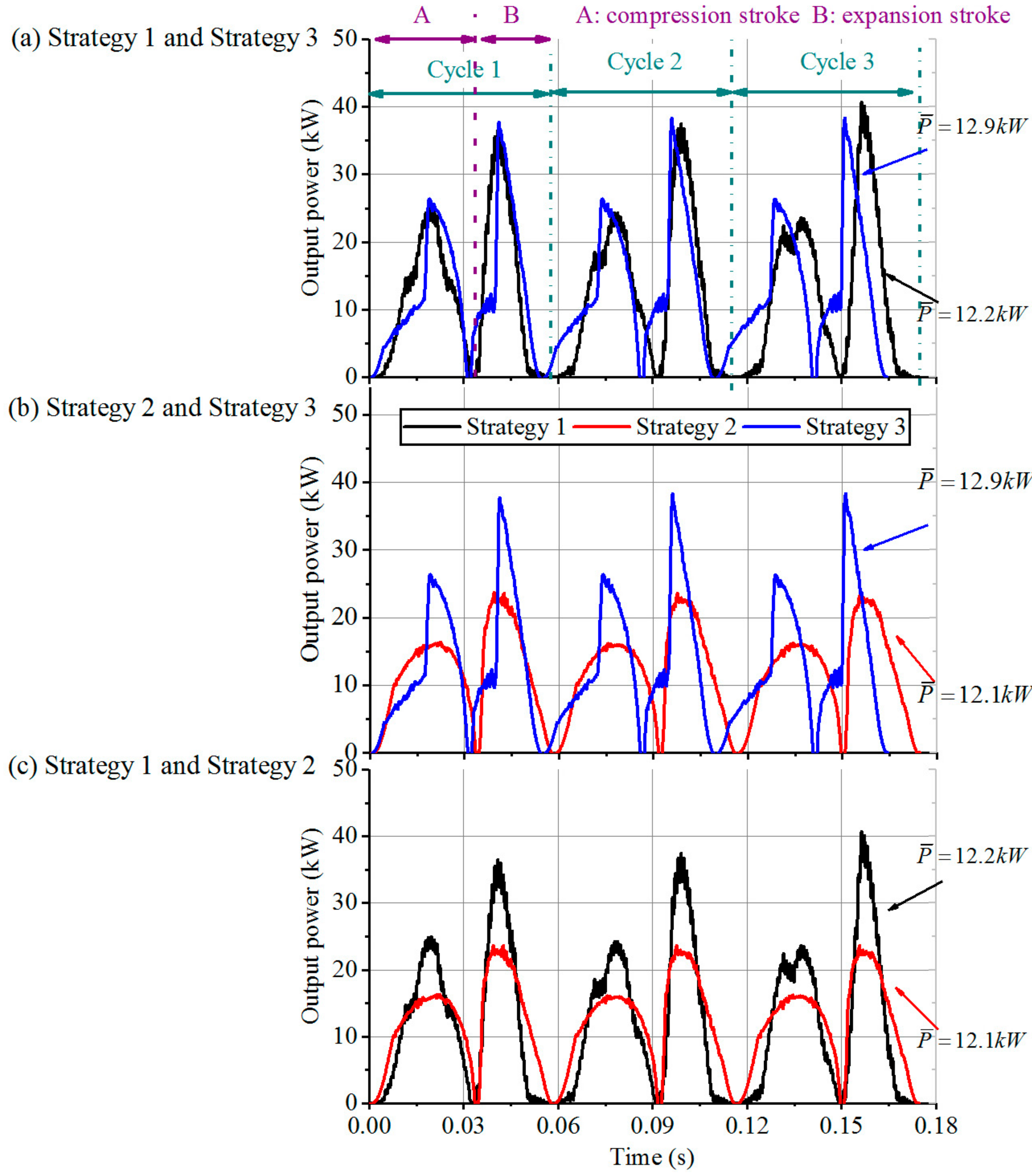
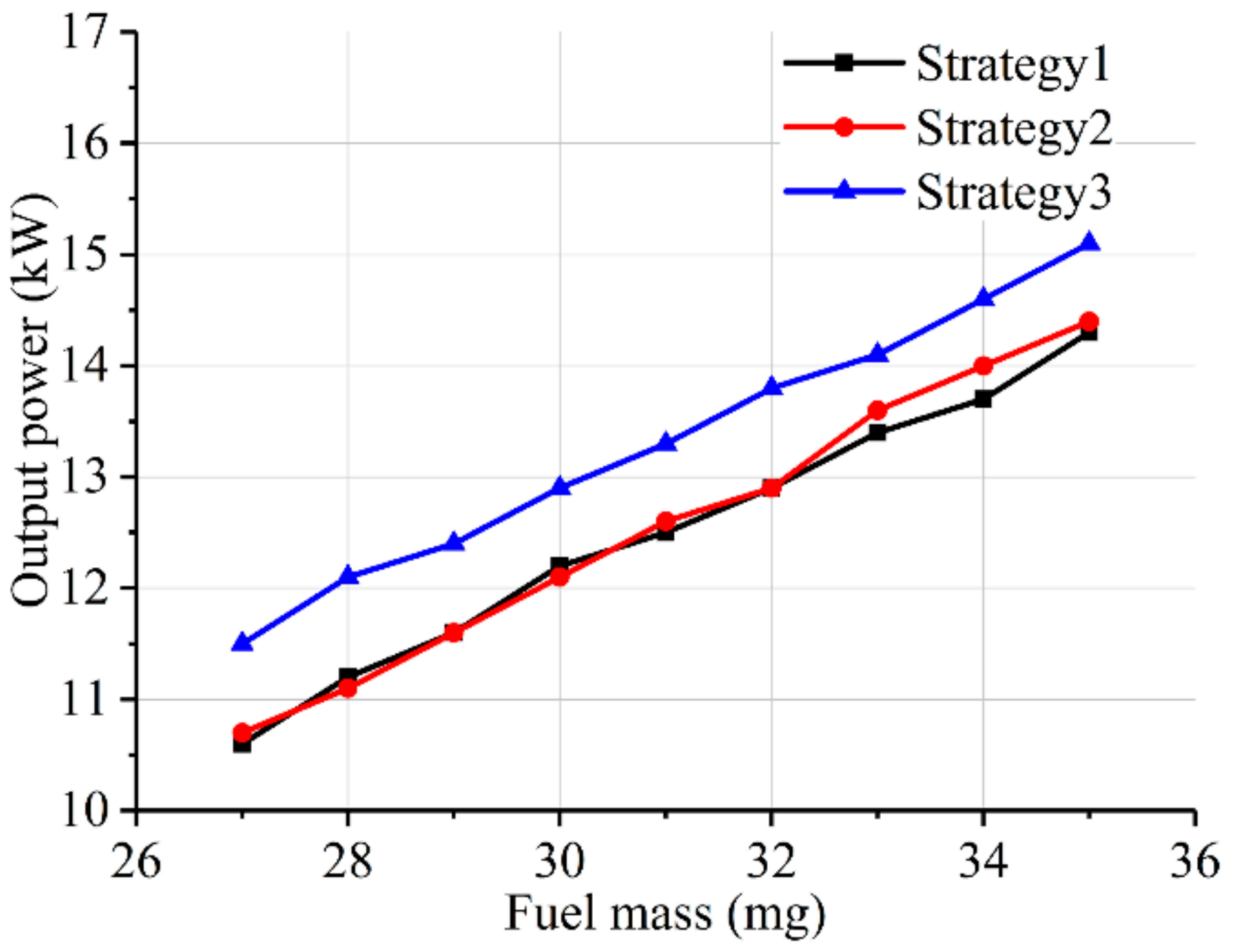
6.2. The Comparative Analysis of Three Control Strategy
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Total in-cylinder energy of the working medium (W) | |
| Heat released by the burnt fuel (W) | |
| Total amount of heat transfer (W) | |
| External work of working medium (W) | |
| Injected energy (W) | |
| Exhaust energy (W) | |
| Leak energy from the ring piston (W) | |
| Voltage of the storage power unit (V) | |
| The number of winding turns per phase | |
| Temperature of the in-cylinder (°C) | |
| In-cylinder pressure (Pa) | |
| Working volume of ICE chamber (m3) | |
| Total in-cylinder mass of working medium (kg) | |
| Constant volume specific heat (J/(kg·K)) | |
| Gas constant (J/(mol·K)) | |
| Injected fuel mass (kg) | |
| Mass fraction burned | |
| Combustion quality factor | |
| Combustion duration (s) | |
| Time variable (s) | |
| Heat transfer surfaces (m2) | |
| Mean piston velocity (m/s) | |
| Average surface temperature of the cylinder wall (°C) | |
| Atmospheric pressure (Pa) | |
| Scavenging position (m) | |
| Intake valves open position (m) | |
| Ignition position (m) |
References
- Mikalsen, R.; Roskilly, A.P. A review of free-piston engine history and applications. Appl. Therm. Eng. 2007, 27, 2339–2352. [Google Scholar] [CrossRef]
- Hung, N.B.; Lim, O. A review of free-piston linear engines. Appl. Energy 2016, 178, 78–97. [Google Scholar] [CrossRef]
- Sun, P.; Zhang, C.; Chen, J.; Zhao, F.; Liao, Y.; Yang, G.; Chen, C.; Sciubba, E. Decoupling design and verification of a free-piston linear generator. Energies 2016, 9, 1067. [Google Scholar] [CrossRef]
- Xu, Z.; Chang, S. Prototype testing and analysis of a novel internal combustion linear generator integrated power system. Appl. Energy 2010, 87, 1342–1348. [Google Scholar] [CrossRef]
- Feng, H.; Song, Y.; Zuo, Z.; Shang, J.; Wang, Y.; Roskilly, A. Stable operation and electricity generating characteristics of a single-cylinder free piston engine linear generator: Simulation and experiments. Energies 2015, 8, 765–785. [Google Scholar] [CrossRef]
- Mikalsen, R.; Roskilly, A.P. Coupled dynamic—Multidimensional modelling of free-piston engine combustion. Appl. Energy 2009, 86, 89–95. [Google Scholar] [CrossRef]
- Mikalsen, R.; Roskilly, A.P. The control of a free-piston engine generator. Part 2: Engine dynamics and piston motion control. Appl. Energy 2010, 87, 1281–1287. [Google Scholar] [CrossRef]
- Jia, B.; Mikalsen, R.; Smallbone, A.; Zuo, Z.; Feng, H.; Roskilly, A.P. Piston motion control of a free-piston engine generator: A new approach using cascade control. Appl. Energy 2016, 179, 1166–1175. [Google Scholar] [CrossRef]
- Jia, B.; Zuo, Z.; Tian, G.; Feng, H.; Roskilly, A.P. Development and validation of a free-piston engine generator numerical model. Energy Convers. Manag. 2015, 91, 333–341. [Google Scholar] [CrossRef]
- Hannson, J.; Leksell, M.; Carlsson, F. Minimizing power pulsations in a free piston energy converter. In Proceedings of the European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005; p. 8. [Google Scholar]
- Lin, J.; Chang, S. Modeling and simulation of a novel internal combustion-linear generator integrated power system using matlab/simulink. In Proceedings of the IEEE International Conference on Power and Energy, Kota Kinabalu, Malaysia, 2–5 December 2012; pp. 435–439. [Google Scholar]
- Kosaka, H.; Akita, T.; Moriya, K.; Goto, S.; Hotta, Y.; Umeno, T.; Nakakita, K. Development of free piston engine linear generator system Part 1—Investigation of fundamental characteristics. SAE Tech. Pap. 2014, 1, 882–888. [Google Scholar]
- Němeček, P.; Vysoký, O. Control of two-stroke free-piston generator. In Proceedings of the 6th Asian Control Conference, Bali, Indonesia, 18–21 July 2006. [Google Scholar]
- Zhang, C.; Li, K.; Sun, Z. Modeling of piston trajectory-based HCCI combustion enabled by a free piston engine. Appl. Energy 2015, 139, 313–326. [Google Scholar] [CrossRef]
- Li, K.; Zhang, C.; Sun, Z. Precise piston trajectory control for a free piston engine. Control Eng. Pract. 2015, 34, 30–38. [Google Scholar] [CrossRef]
- Goto, S.; Moriya, K.; Kosaka, H.; Akita, T.; Hotta, Y.; Umeno, T.; Nakakita, K. Development of free piston engine linear generator system Part 2—Investigation of control system for generator. SAE Tech. Pap. 2014, 1, 247–254. [Google Scholar]
- Zhang, C.; Sun, Z. Using variable piston trajectory to reduce engine-out emissions. Appl. Energy 2016, 170, 403–414. [Google Scholar] [CrossRef]
- Xu, Z.; Chang, S. Hierarchical hybrid control of a four-stroke free-piston engine for electrical power generation. In Proceedings of the International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 4045–4049. [Google Scholar]
- Xu, Z.; Chang, S. Improved moving coil electric machine for internal combustion linear generator. IEEE Trans. Energy Convers. 2010, 25, 281–286. [Google Scholar]
- Sun, P.; Zhang, C.; Chen, J.; Zhao, F.; Liao, Y.; Yang, G.; Chen, C. Hybrid system modeling and full cycle operation analysis of a two-stroke free-piston linear generator. Energies 2017, 10, 213. [Google Scholar] [CrossRef]
- Feng, H.; Guo, Y.; Song, Y.; Guo, C.; Zuo, Z. Study of the injection control strategies of a compression ignition free piston engine linear generator in a one-stroke starting process. Energies 2016, 9, 453. [Google Scholar] [CrossRef]
- Gong, X.; Zaseck, K.; Kolmanovsky, I.; Chen, H. Dual-loop control of free piston engine generator. IFAC-PapersOnLine 2015, 48, 174–180. [Google Scholar] [CrossRef]
- Gong, X.; Zaseck, K.; Kolmanovsky, I.; Chen, H. Modeling and predictive control of free piston engine generator. In Proceedings of the 2015 American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 4735–4740. [Google Scholar]
- Yang, R.; Gong, X.; Hu, Y.; Chen, H. Motion control of free piston engine generator based on LQR. In Proceedings of the 34th Chinese Control Conference, Hangzhou, China, 28–30 July 2015; pp. 8091–8096. [Google Scholar]
- Xia, H.; Pang, Y.; Grimble, M. Hybrid modelling and control of a free-piston energy converter. In Proceedings of the 2016 IEEE International Conference on Control Applications, Munich, Germany, 4–6 October 2006; pp. 373–378. [Google Scholar]
- Sun, P.; Zhao, F.; Zhang, C.; Zhang, J. Dynamic simulation of a novel free-piston linear generator. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics, Busan, South Korea, 7–11 July 2015; pp. 1641–1646. [Google Scholar]
- Virsik, R.; Heron, A. Free piston linear generator in comparison to other range-extender technologies. In Proceedings of the Electric Vehicle Symposium and Exhibition, Barcelona, Spain, 17–20 November 2014; pp. 1–7. [Google Scholar]
- Kim, J.; Bae, C.; Kim, G. Simulation on the effect of the combustion parameters on the piston dynamics and engine performance using the Wiebe function in a free piston engine. Appl. Energy 2013, 107, 446–455. [Google Scholar] [CrossRef]
- Hung, N.B.; Lim, O.T. A study of a two-stroke free piston linear engine using numerical analysis. J. Mech. Sci. Technol. 2014, 28, 1545–1557. [Google Scholar] [CrossRef]
- Cawthorne, W.R.; Famouri, P.; Chen, J.; Clark, N.N.; McDaniel, T.I.; Atkinson, R.J.; Nandkumar, S.; Atkinson, C.M.; Petreanu, S. Development of a linear alternator-engine for hybrid electric vehicle applications. IEEE Trans. Veh. Technol. 1999, 48, 1797–1802. [Google Scholar] [CrossRef]
- Li, Q.-F.; Xiao, J.; Huang, Z. Parametric study of a free piston linear alternator. Int. J. Automot. Technol. 2010, 11, 111–117. [Google Scholar] [CrossRef]
- Miao, Y.; Zuo, Z.; Feng, H.; Guo, C.; Song, Y.; Jia, B.; Guo, Y. Research on the combustion characteristics of a free-piston gasoline engine linear generator during the stable generating process. Energies 2016, 9, 655. [Google Scholar] [CrossRef]
- Mikalsen, R.; Roskilly, A.P. Performance simulation of a spark ignited free-piston engine generator. Appl. Therm. Eng. 2008, 28, 1726–1733. [Google Scholar] [CrossRef]
- Shoukry, E.; Taylor, S.; Clark, N.; Famouri, P. Numerical simulation for parametric study of a two-stroke direct injection linear engine. SAE Tech. Pap. 2002. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Nominal output power Pnom (kW) | 15 |
| Operating frequency fz (Hz) | 15–25 |
| Efficiency of generator ηmag (%) | 94 |
| Combustion indication efficiency ηi (%) | 48 |
| Frictional coefficient f (N·(m/s)−1) | 12 |
| Piston sectional area Ap (m2) | 0.0082 |
| Load resistance R (Ω) | 6 |
| Internal resistance r (Ω) | 0.33 |
| Excess air coefficient α | 1.05 |
| Specific heat ratio γ | 1.32 |
| Combustion duration Tc (m·s) | 4 |
| Combustion quality index n | 2 |
| Thrust constant Ki (N/A) | 34.7 |
| Fuel lower heating value Hu (J/mg) | 44 |
| Elasticity coefficient Ksp (kN/m) | 80 |
| Target top dead center TDC* (mm) | 10 |
| Target bottom dead center BDC* (mm) | 125 |
| Equivalence ratio εe | 1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Chen, F.; Li, L.; Xu, Z.; Liu, L.; Yang, G.; Lian, H.; Tian, Y. A Free-Piston Linear Generator Control Strategy for Improving Output Power. Energies 2018, 11, 135. https://doi.org/10.3390/en11010135
Zhang C, Chen F, Li L, Xu Z, Liu L, Yang G, Lian H, Tian Y. A Free-Piston Linear Generator Control Strategy for Improving Output Power. Energies. 2018; 11(1):135. https://doi.org/10.3390/en11010135
Chicago/Turabian StyleZhang, Chi, Feixue Chen, Long Li, Zhaoping Xu, Liang Liu, Guilin Yang, Hongyuan Lian, and Yingzhong Tian. 2018. "A Free-Piston Linear Generator Control Strategy for Improving Output Power" Energies 11, no. 1: 135. https://doi.org/10.3390/en11010135
APA StyleZhang, C., Chen, F., Li, L., Xu, Z., Liu, L., Yang, G., Lian, H., & Tian, Y. (2018). A Free-Piston Linear Generator Control Strategy for Improving Output Power. Energies, 11(1), 135. https://doi.org/10.3390/en11010135