1. Introduction
The regulation system for the high equality induction motor speed applications are guaranteed by the precious speed closed-loop control. If the speed encoder, rotary transformer, or other speed measuring device are used to obtain the speed signal, the difficulty of installation and the related cost will be problematic. Additionally, the reliability of the speed sensor will be decreased in harsh environments. Sensorless speed control technology has been introduced to estimate the real-time speed without the assistance of hardware devices. A series of problems brought by the speed sensor can be avoided. Therefore, dozens of sensorless speed estimation methods have been studied and applied [
1,
2]. Many practical issues need to be considered in the actual application process. Firstly, sensorless speed estimation could be severely affected by the variations of parameters [
3,
4]. Meanwhile, the accuracy of the speed estimation at low speed and the stability through the full speed range are critical issues of concern [
5,
6,
7]. Therefore, it has been a challenging task to find an appropriate speed estimation method to obtain a satisfactory result in actual engineering applications [
8,
9,
10].
Speed estimation based on the quadrature model reference adaptive system (MRAS) has gained high popularity [
11] in sensorless speed control research because of its simple control and superior performance, which was first introduced by Schauer [
12]. The flux linkages of the voltage model without a speed variable was used as the reference model of (MRAS), while the flux linkage of the current model including speed was used as the adjustable model. The estimation accuracy and anti-interference performance have been greatly improved compared with the conventional method. It can also ensure the stability of the system. However, there also exist disadvantages for the MRAS method. Since the MRAS method is based on the voltage model and flux linkage, the precision influences the accuracy of the speed estimation, which generally involves parameters related to the stator resistance. This influence could be further deteriorated by the changes in resistance during the motor operation. Meanwhile, the pure integrator contained in the voltage model leads to the accumulation of error and zero drift. This will result in a seriously-affected speed estimation precision for the low-speed operating scenario [
13].
To overcome the above-mentioned demerits inherited in the conventional MRAS technique, many research works have been conducted that focus mainly on selecting appropriate reference models and adjustable models. For example, Peng and others proposed a new method by using the back electromotive force (back-EMF) to replace the original flux linkages [
14]. In this way, the pure integrator can be avoided. However, stator resistance parameters still exist in the model, which still affects the speed estimation performance in the low speed condition [
14]. In [
15], the instantaneous air gap reactive power was proposed to replace the back-EMF. The stator resistance parameters are removed from the reference model, which can eliminate its influence over the system speed estimation. However, the reference model still has the derivative operation on stator current. This will cause the MRAS to be extremely sensitive to the noise of the whole system. In addition, other parameters related to the motor, such as the leakage flux coefficient, are also included in the model.
To solve the problems of the speed estimation technique based on air gap reactive power, a new method was proposed in [
16,
17]. The air gap reactive power was replaced with the reactive power obtained from the induction machine. This method also successfully eliminates the differential term of the stator current. Meanwhile, the whole MRAS system does not have the parameters of stator resistance and the pure integrator, which helps improve the performance of the motor speed estimation significantly. The adjustable model contains motor parameters, such as the flux leakage coefficient, the parameters of inductance, and so on. This may have a negative influence on the rotational speed estimation in the running process of the motor. Additionally, this method also fails to solve the unstable problem of the control system.
In this section, a novel speed estimation scheme based on instantaneous reactive power (Q) based on model reference adaptive system (Q-MRAS) is proposed. In this method, the reactive power in the static coordinate system is used as the reference model, which does not contain information about the rotational speed. However, the reactive power in the rotating coordinate system includes the rotational speed information. The proposed Q-MRAS method does not have motor parameters, which can avoid its influence on the performance of rotating-speed estimation. The limitations of conventional Q-MRAS method and the proposed Q-MRAS method are analyzed in detail. Simulation and the corresponding hardware experiments are conducted to verify the feasibility and superiority of the improved algorithm.
2. The Rotational Speed Estimation Based on the Q-MRAS Method
2.1. The Rotational Speed Estimation Based on Conventional Q-MRAS Method
The mathematical voltage model in synchronous rotation coordinate system (
d-q frame) can be expressed as:
where
usd,
usq,
isd,
isq, are the stator voltages and currents, respectively;
Rs is the stator resistance;
Ls,
Lr are the inductance of stator and rotor and the
Lm is the mutual inductance.
ωe is the synchronous speed and
ωr is the rotor speed,
ωsl is the speed deviation,
σ is the magnetic flux leakage factor coefficient.
The instantaneous reactive power of the induction motor can be expressed as:
Combining Equations (1) and (2):
It can be clearly seen in Equation (3) that, compared with the MRAS speed estimation method based on the rotor flux error, the most significant feature in this is that there are no parameters of the stator resistance. Thus, when the motor is operating, the variation of the stator resistance will not have any effects on it. Since there is no pure integrator in this system, it also eliminates the integral drift and other problems. The accuracy of the system will be improved greatly.
Equation (3) is the reactive power when the motor is in transient states. When the motor is in steady states, and Equation (3) is modified to Equation (4). In Equation (4), the differential items all become zero:
Moreover, because
ψrd =
Lmisd,
ψrq = 0, Equation (4) can be simplified to Equation (5):
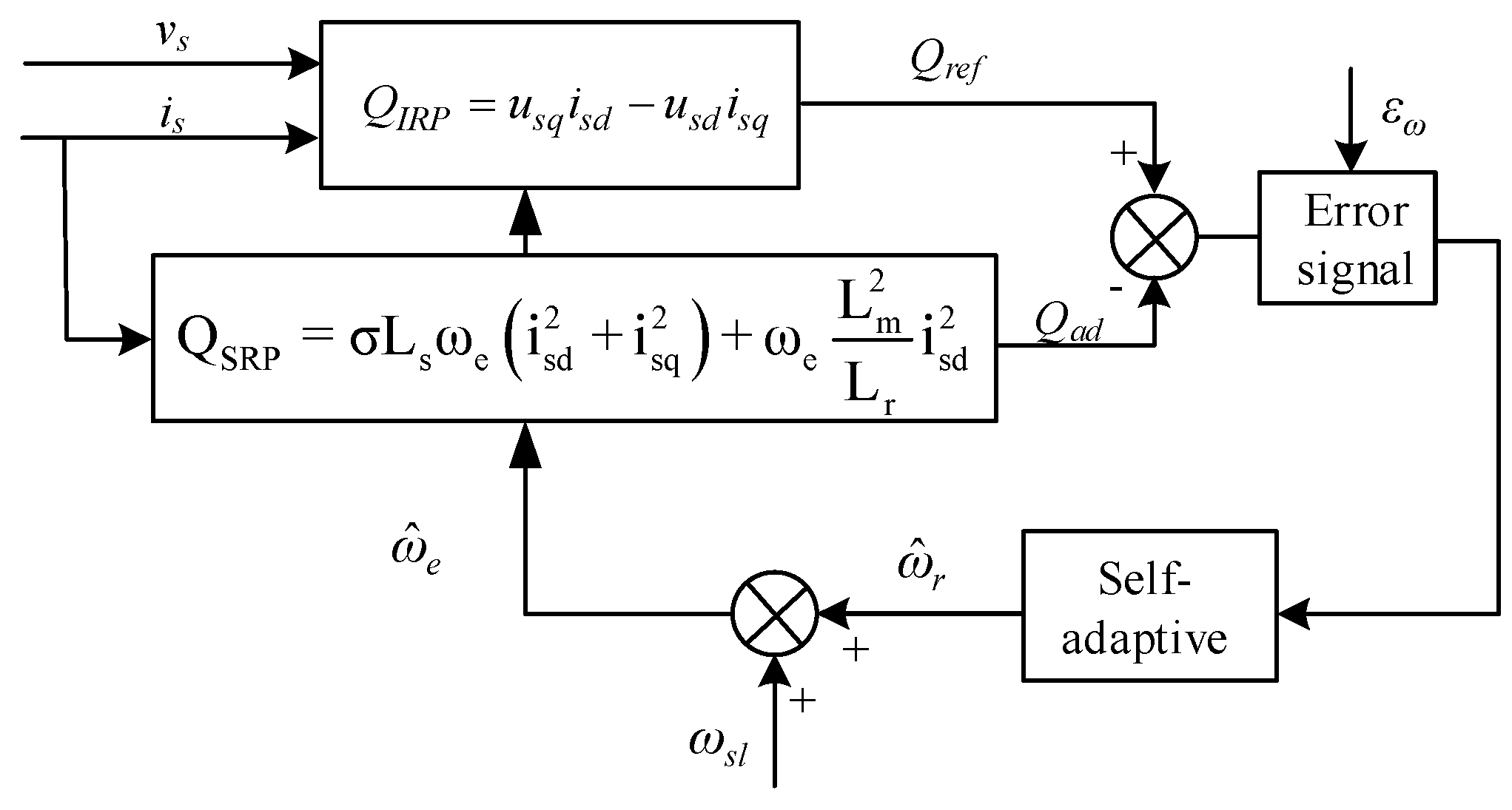
The structure of conventional Q-MRAS is shown in
Figure 1. The reference model of the estimation system is built based on Equation (2), and the adjustable model is shown in Equation (5). The design of adaptive structure is mainly based on the Popov-hyper stability theory. The proportional-integral (PI) regulator is chosen to realize a reliable sensorless speed estimation design.
From
Figure 1, it can be found that an error signal processing module is added to the speed estimation system. This module is used to process the reference module and the error signal of reactive power produced by the adjustable model. The speed error signal in the vector control system can be processed in this module as well.
The processing rule is shown in Equation (6). After running through the error signal processing module, the output error is sent to the adaptive structure and, finally, the parameters of rotating speed are regulated in the adjustable module.
Since the whole closed-loop estimation system is strictly positive, the whole system is stable.
where
εQ is the reactive power error, and
εw is the rotation speed error.
d is the output of the module.
2.2. The Rotational Speed Estimation Based on the Improved Q-MRAS Method
The Q-MRAS speed estimation method mentioned above improves the performance of the motor speed estimation, to some extent, compared with the conventional MRAS method. However, there still exist motor parameters that may influence the performance, such as inductance, and so on. To solve the problem of the conventional Q-MRAS algorithm, the reactive power s expressed under the stationary reference frame, are used as the reference model without the rotate speed in this section. The reactive power s under the rotating coordinate system are used as adjustable model, which contains the rotation speed information. By using this method, there are no motor parameters in this MRAS system, which is good for the performance of the system. The basic structure of the proposed improved MRAS can be illustrated in
Figure 2.
The reactive power can be expressed as:
In two-phase static coordinates, the reactive power is shown in Equation (8):
The stationary coordinate system of voltage and current are shown in Equation (9):
where
Vm,
Im are the amplitude of the voltage and the current respectively.
ϕ is the phase difference between voltage and current.
Combined the two s above, Equation (10) can be illustrated in the following:
However, the reaction power expression can be shown in Equation (11) under the rotating coordinates.
The voltage and the current under the rotating coordinates can be calculated by the Park transformation in Equation (12):
Combining Equations (11) and (12), Equation (13) is delivered as follows:
The result of Equation (13) is the same as Equation (10), so it is reasonable to build the MRAS system by using this method. Equations (8) and (11) are the reference model and adjustable model, respectively.
In order to ensure that the estimation system can be reliable and correct, the adaptation law design of the improved Q-MRAS system in
Figure 2 needs to ensure the stability of the closed-loop system. As a consequence, the self-adaption system can also be designed through Popov’s hyperstability theory.
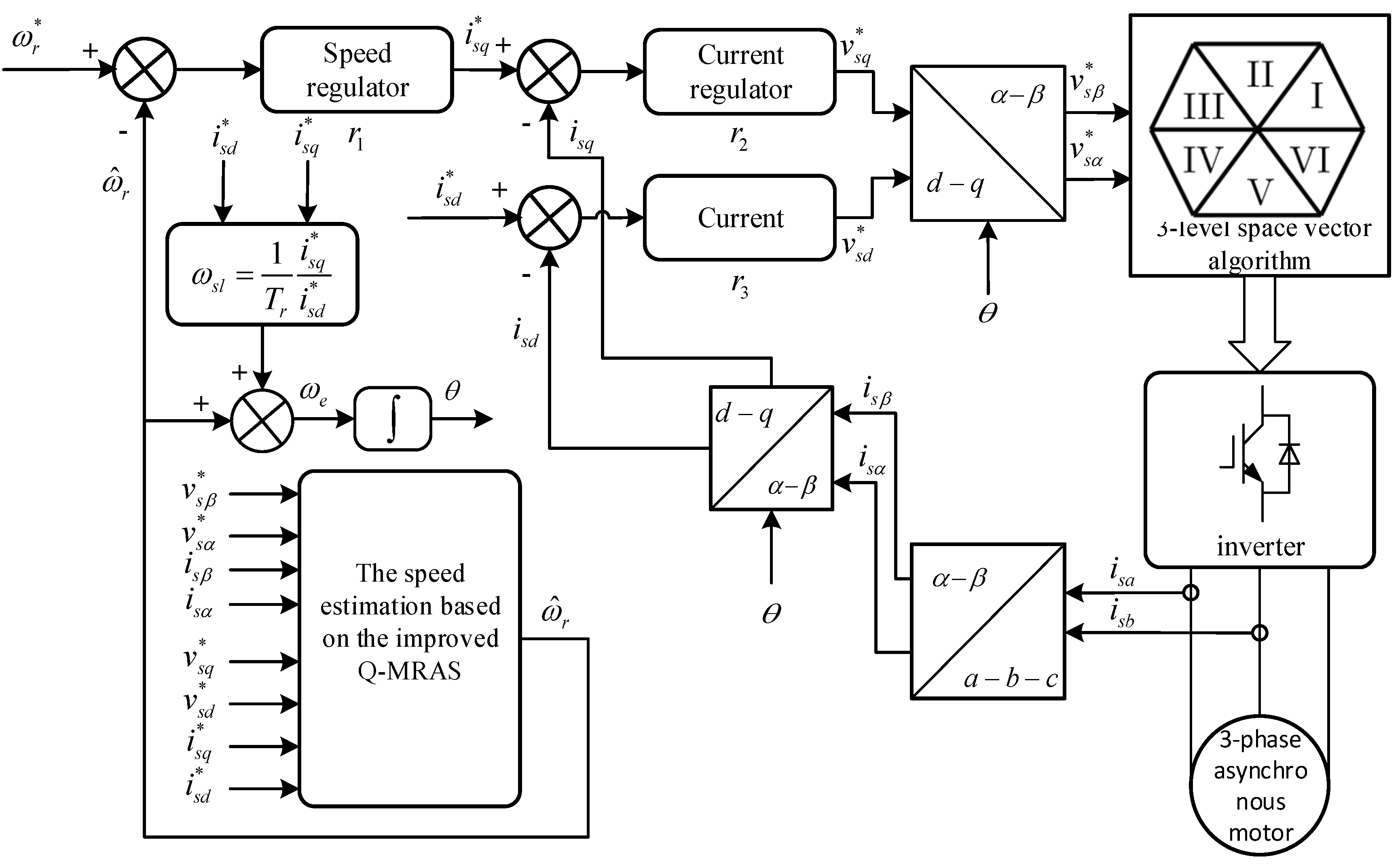
3. Study on the Stability of the Sensorless Speed Vector Control System
The improved Q-MRAS speed estimation method can be applied in the indirect vector control system of the induction motor to achieve the sensorless speed vector control. The overall design diagram is given in
Figure 3.
The speed identification structure, based on the Popov super-stability theory, has ensured the stability of the identification system, as well as the stability of the closed-loop system formed by nonlinear feedback. To improve the dynamic response ability of the system, small signal model is introduced. The state spaces of induction motor are expressed in Equation (14) [
17]:
where:
The standard state spaces are written as follows:
Combining Equations (14) and (16):
In
Figure 3, the speed regulators and two current regulators in the indirect vector control system employ the common PI controllers, which are shown in the following equations.
Current regulators of the
q axis:
Current regulators of the
d axis:
By using Equations (22) and (23), Equation (19) can be expressed as follows:
The small signal analysis is presented according to the working statement at
x0 point in Equation (17):
Equation (25) can be modified to Equation (26) by means of the Laplace transform:
where:
The expressions of (∆isd/∆ωr) and (∆isq/∆ωr) are calculated by substituting A, B, C, ∆A, and ∆u in Equation (26).
The error of the reactive power in the improved Q-MRAS is defined as
ε:
Considering a small disturbance ∆
ωr produced by the speed:
Equation (33) is obtained by dividing both sides of Equation (32) by ∆
ωr.
Meanwhile, according to the structure based on the improved Q-MRAS, it can be expressed in Equation (34):
Combining Equations (33) and (34):
Equation (35) illustrates the transfer function of the variation of input rotation rate
and output rotation rate
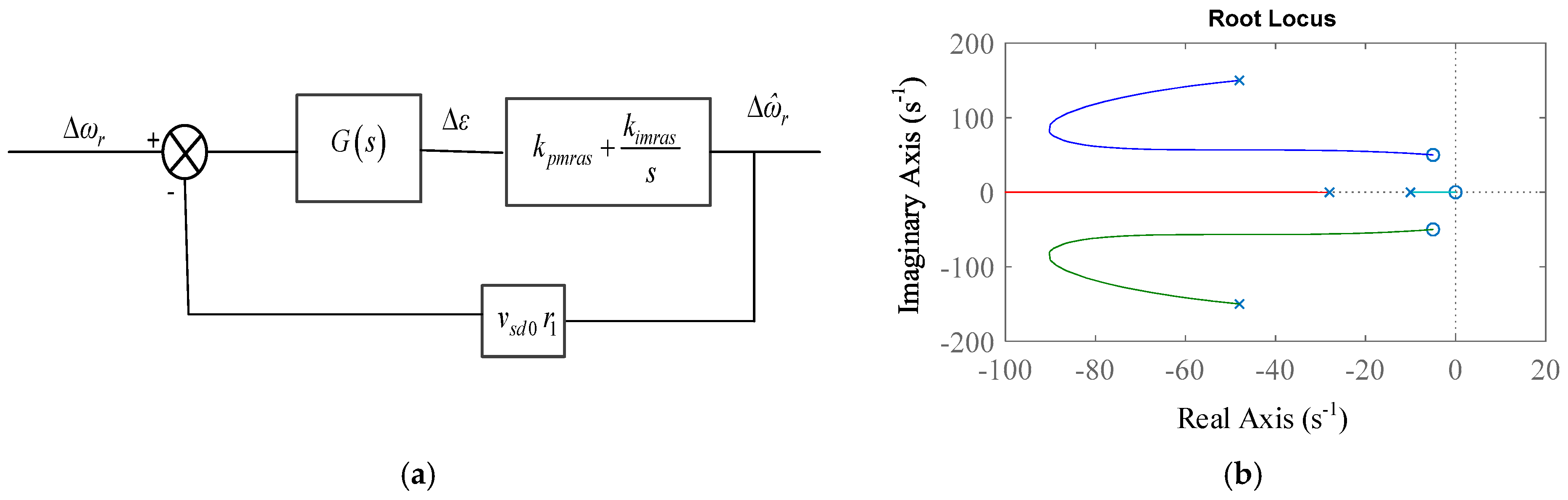
. The block diagram representing the structure of the Q-MRAS based state space is shown in
Figure 4a. The root locus plot of Equation (35) for the forward motoring mode is shown in
Figure 4b, which represents stability of the speed estimator.
When small disturbances are introduced at the actual speed of the induction motor to guarantee the accurate tracking between the dynamical speed estimation value and the variation of the actual motor speed. The sensorless speed vector control system is stable in Equation (35) mentioned above. The coefficient of the characteristic changes with the specific working condition, and the state of the speed regulating system is determined by the given speed and the load torque. Thus, in the torque-speed area, the whole system’s stability is judged by the Routh Criterion.
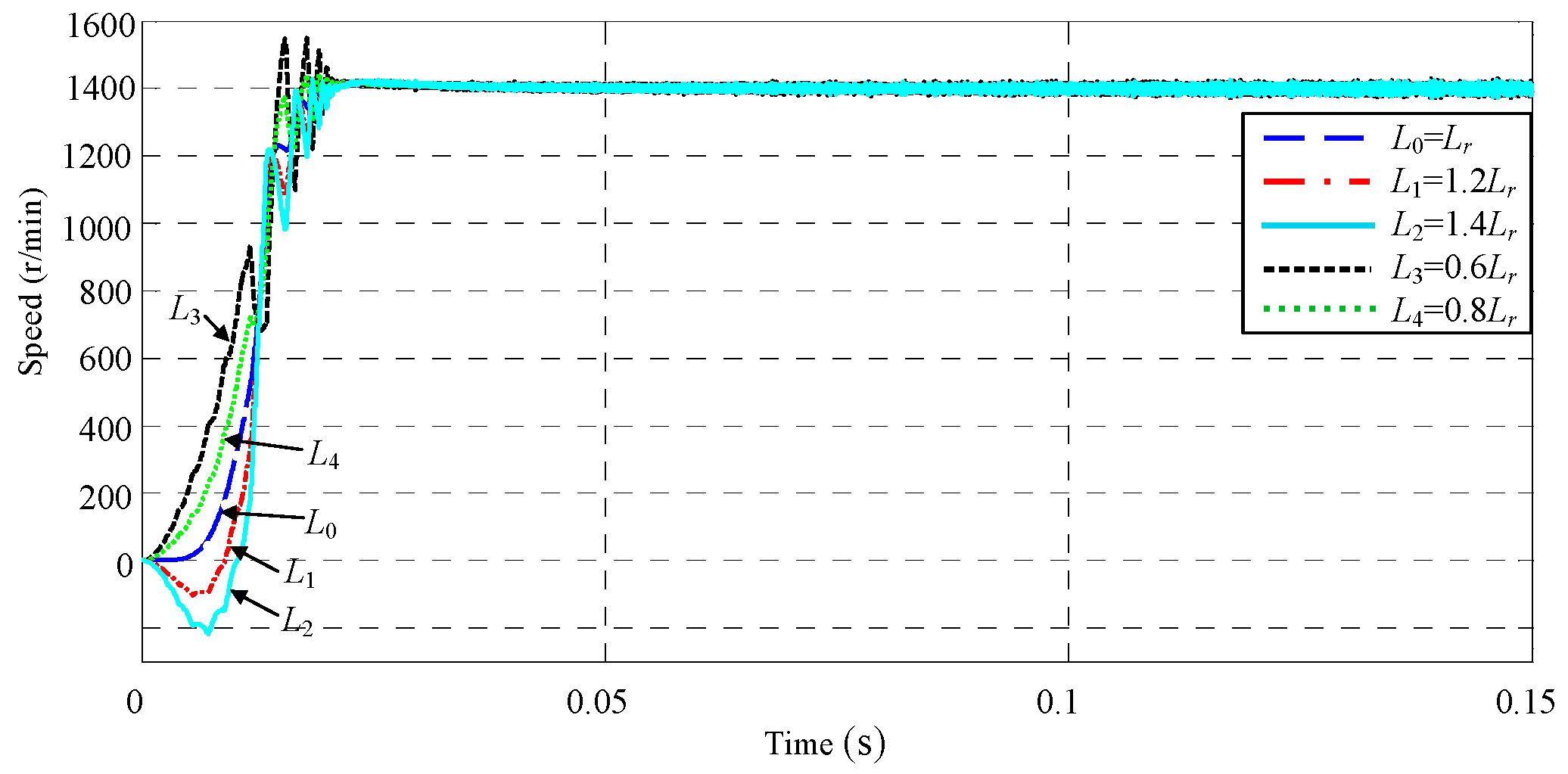
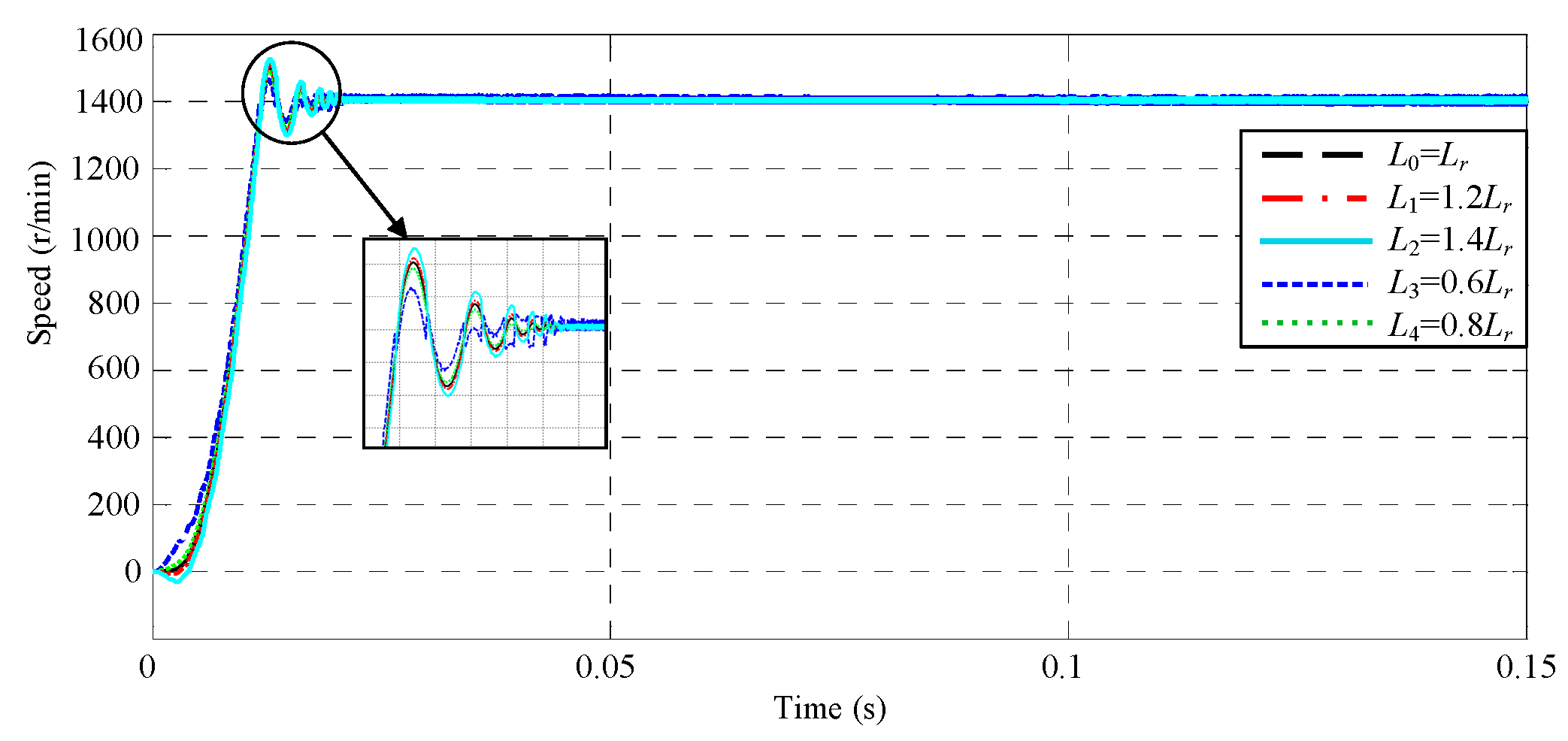
In the vector control system simulation platform, the PI parameters of the control system are obtained by integrating the transfer function in Equation (35). The induction motor speed changes from 0 r/min to 1400 r/min, and the load torque changes from 0 Nm to 5 Nm.
The Routh Criterion is utilized to judge the stability of the corresponding system. It can be seen that the indirect vector control system using the improved Q-MRAS speed estimation performs stably when the machine load varies.
5. Experimental Verification
In order to further study and identify the actual effect of the control system, a corresponding experimental platform has been built in this chapter and a software algorithm will also be designed. Finally, the debugging of the software and hardware has been accomplished. The running time of the interrupt subroutine is set at 0.0002 s, that is, the frequency is 5 kHz. All the vector control algorithms of the sensorless speed estimation are finished in this period of time.
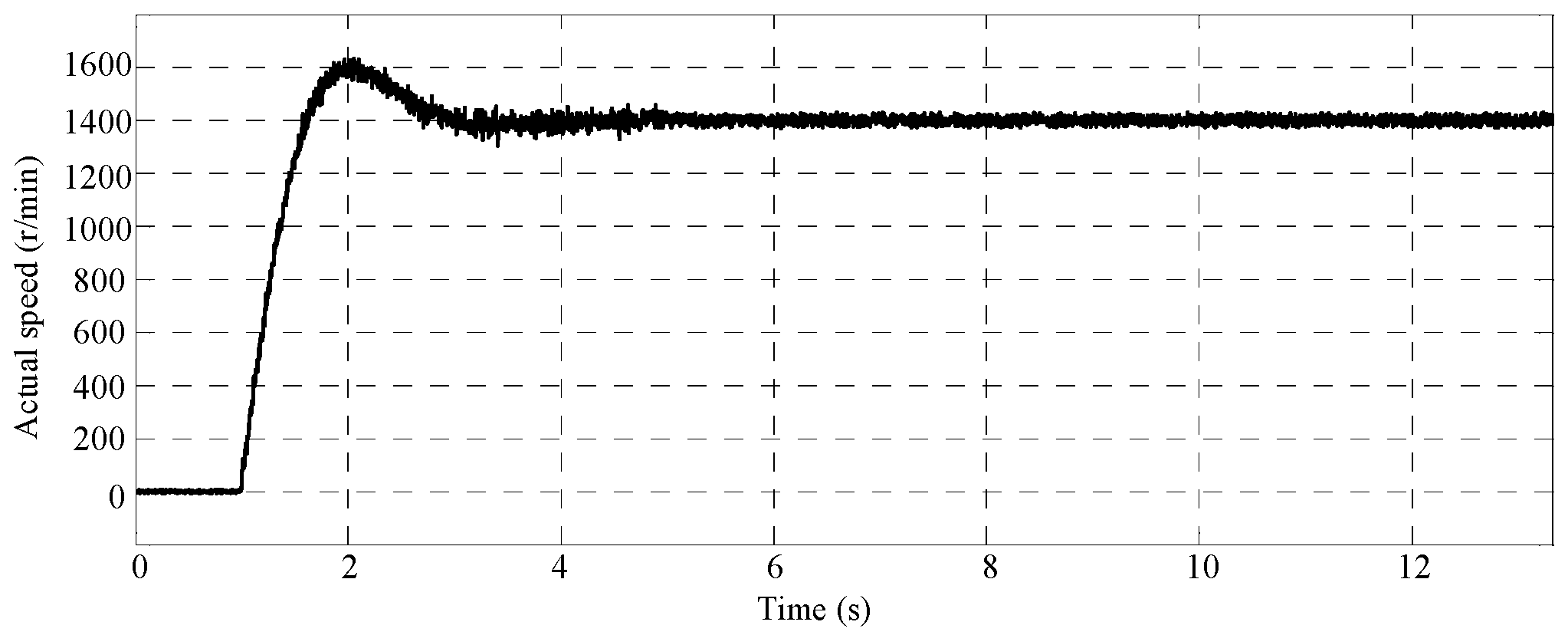
5.1. Zero-Load Startup Experiment
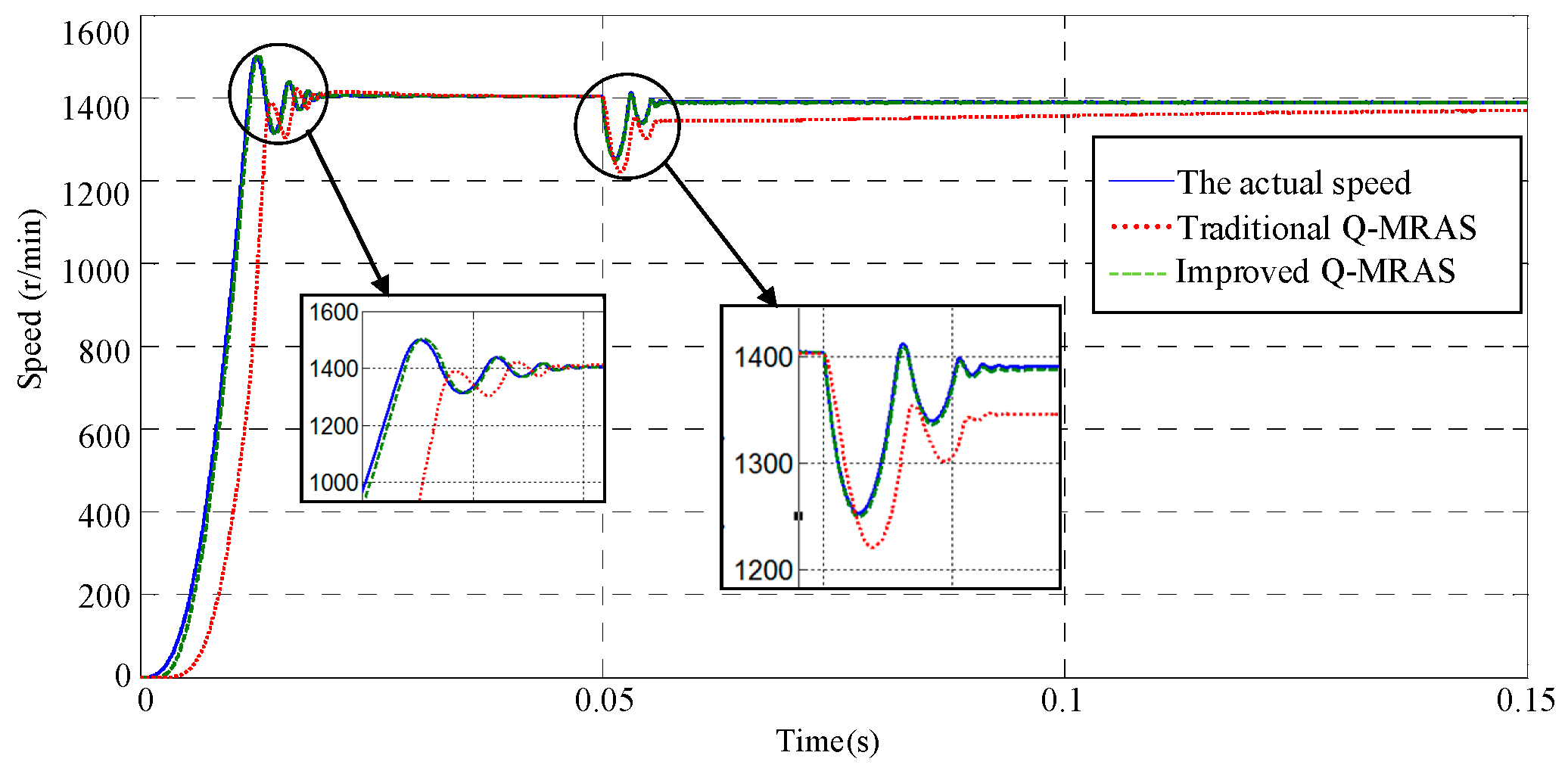
In the zero-load startup experiment, the given speed of the induction motor is set to 1400 r/min, and the load is set to 0 Nm.
When the two motors are connected back-to-back, and they are used as a test platform, one side of the platform is a synchronous machine, which contains a 2500 wire encoder in it. The actual speed of the induction motor can be detected by using this encoder. During this work, the output waves of the speed estimation algorithm are observed by using the View/Graph function in CCS5.5 (TMS320F28335 Delfino Microcontroller, Texas Instruments, Inc., Dallas, TX, USA). Meanwhile, the PI parameters in the adaptive structure are adjusted according to the result. The procedure is finished until the debugging has been done. The experiment results are shown below.
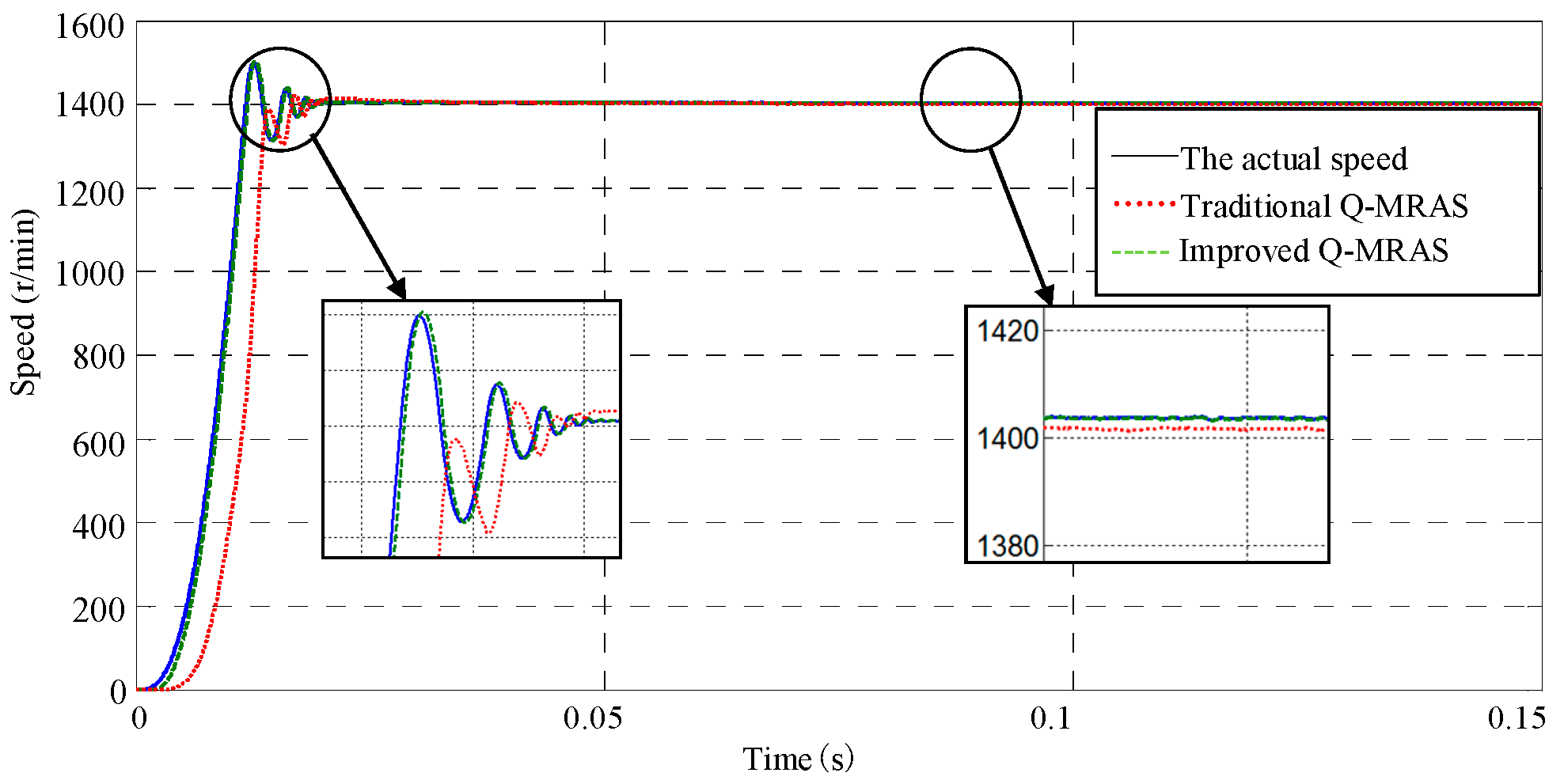
The actual speed of the induction motor is shown in
Figure 13, and it is obtained by the encoder in the synchronous motor.
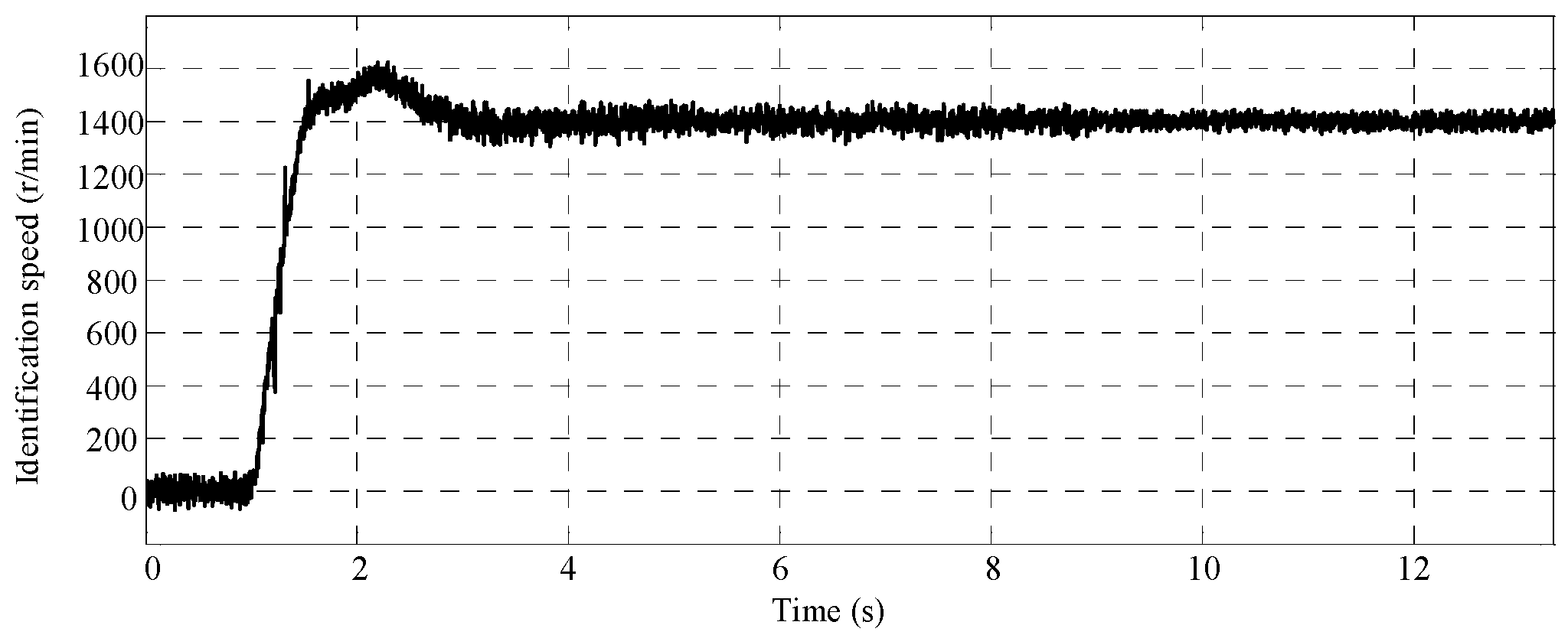
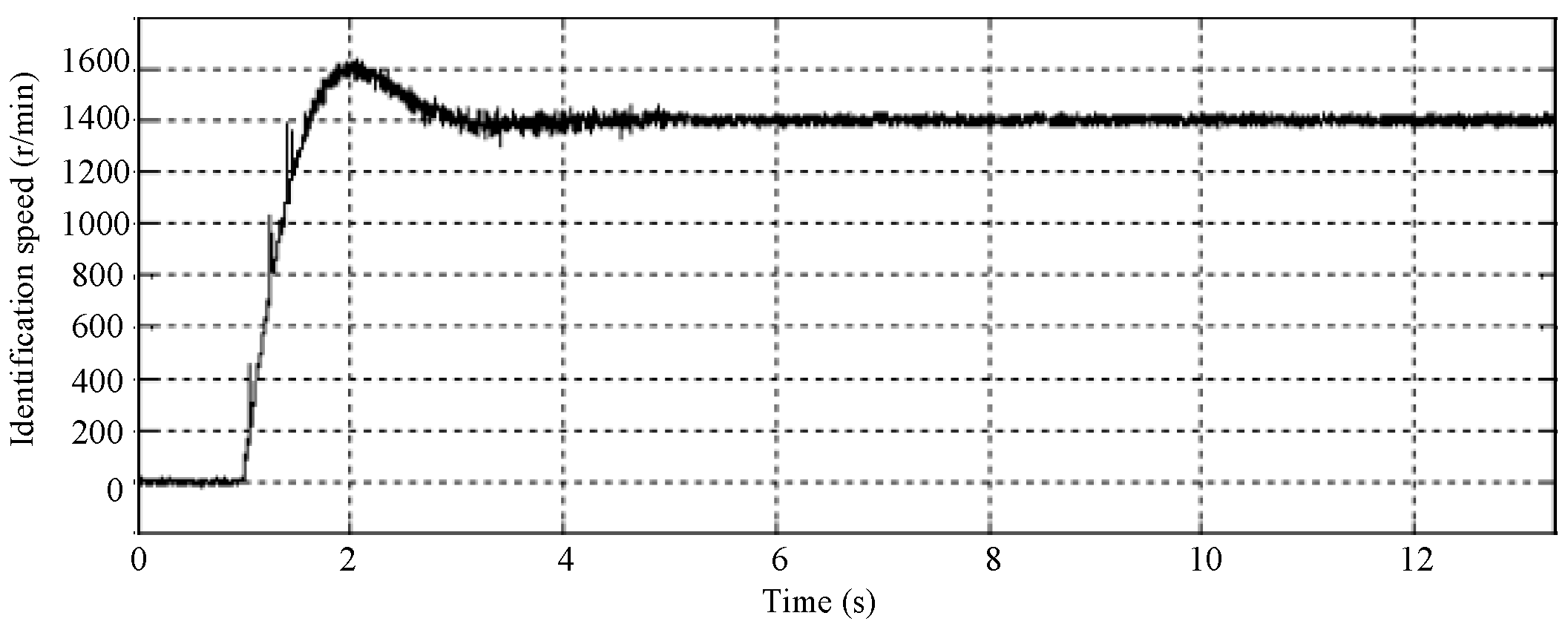
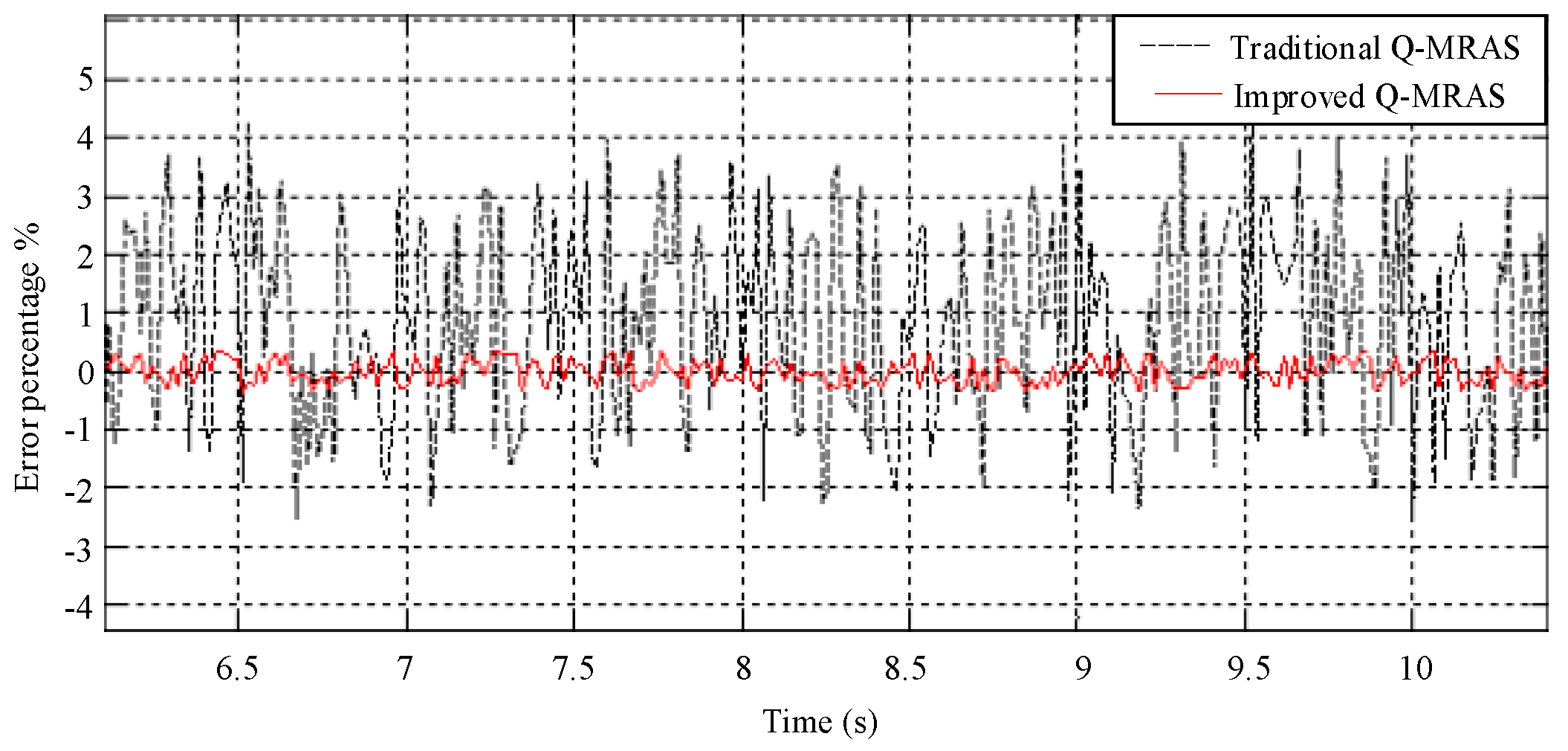
Figure 14 and
Figure 15 show the speed, which is estimated by the conventional Q-MRAS and improved Q-MRAS algorithm method, respectively. The speed estimated by these two algorithms is almost the same as the actual speed. The tracking performance of the improved Q-MRAS algorithm is better in the startup process. The error comparisons in the static process are shown in
Figure 16. The error is greater in the conventional Q-MRAS algorithm, and the error usually fluctuates between −3% and 4%, while the estimation error in the steady state of the improved Q-MRAS algorithm is controlled within ±0.5%.
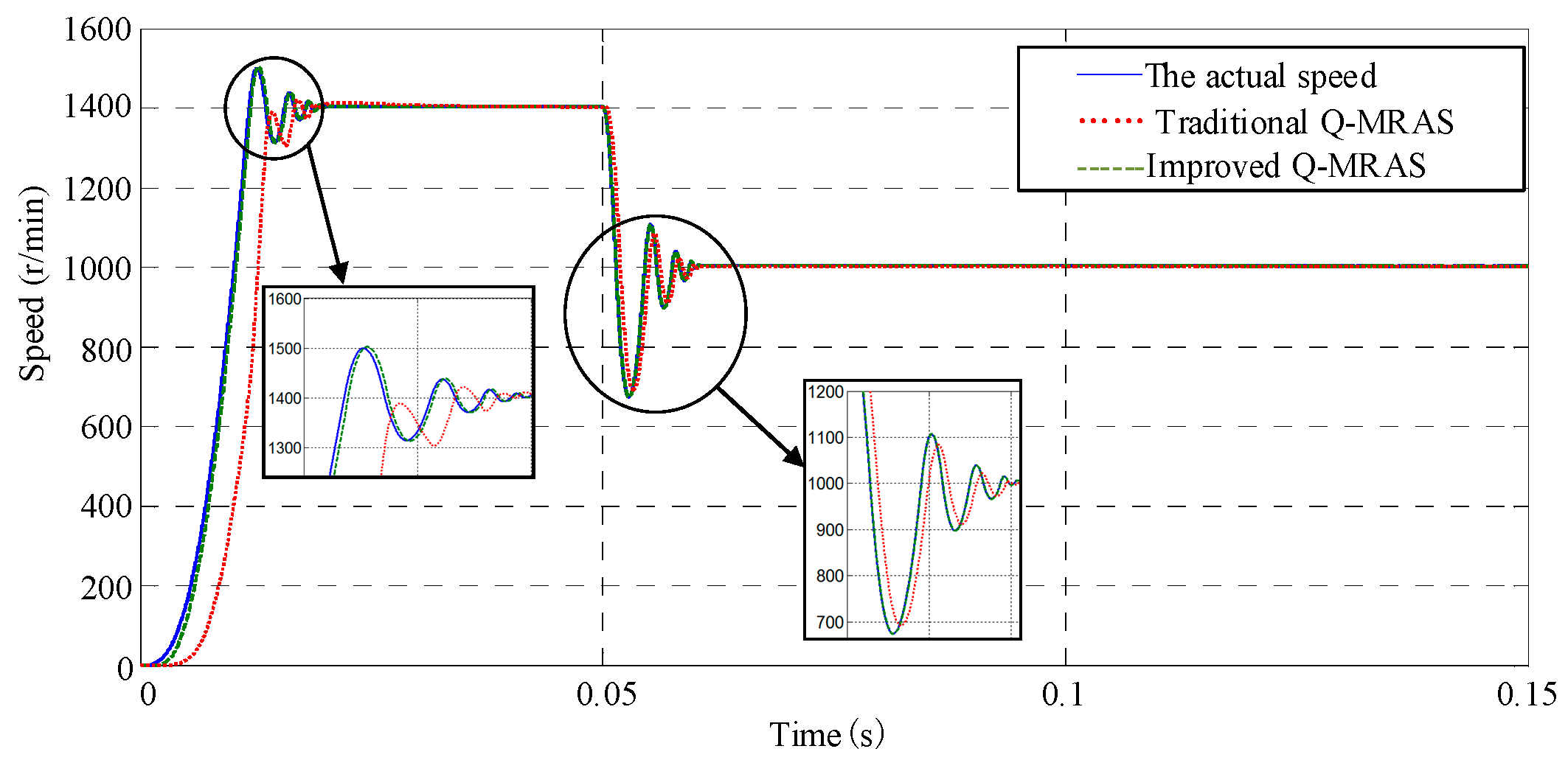
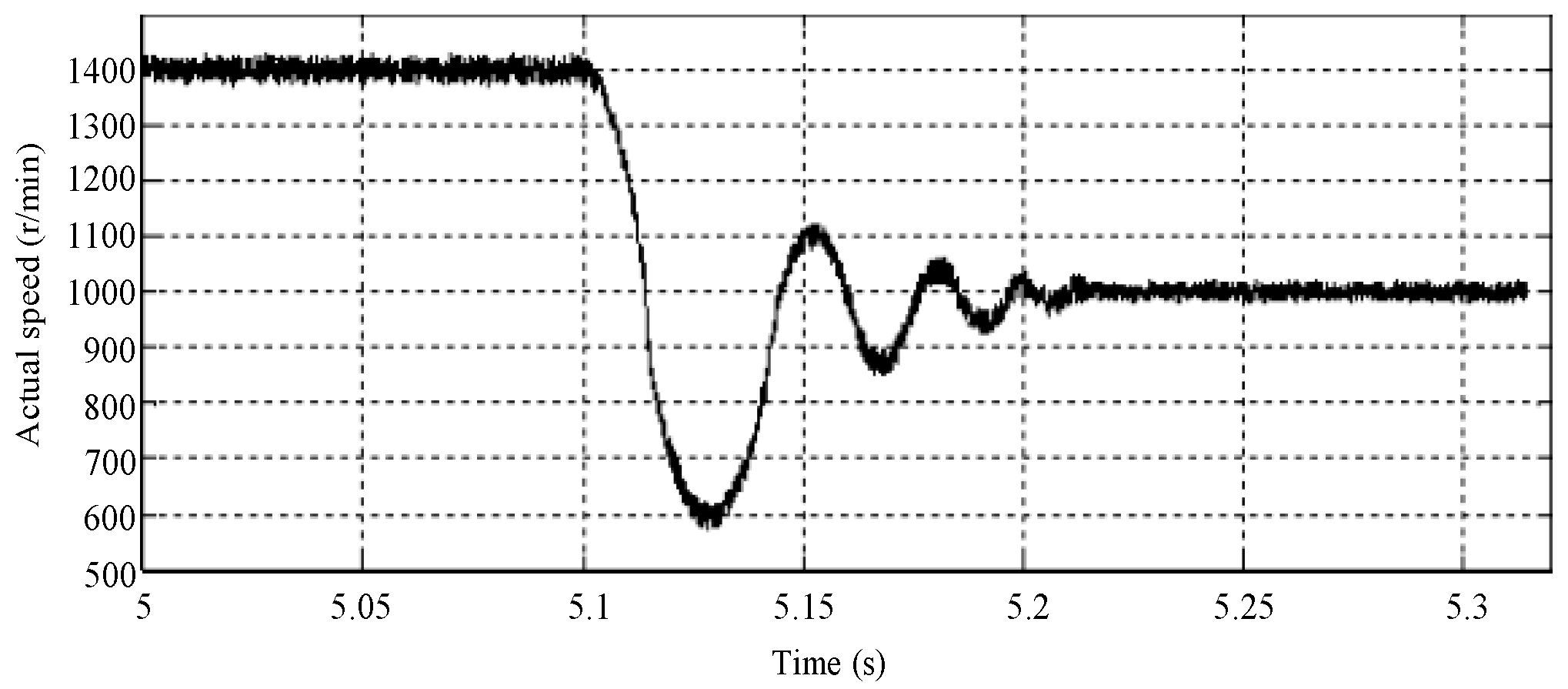
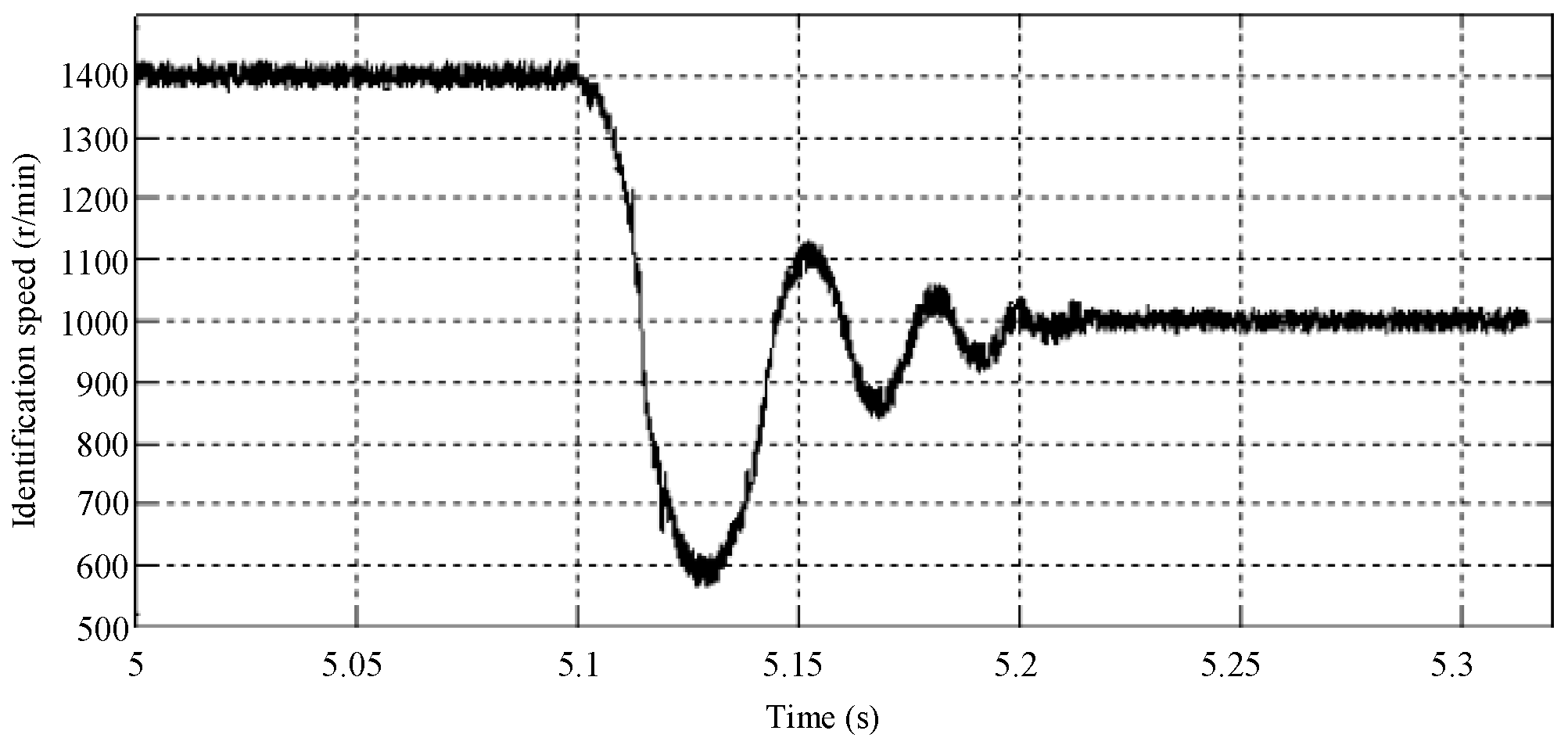
5.2. The Speed Mutation Experiment
When the motor changes its state from zero load condition to the rated speed condition, the instruction speed of the motor is changed from 1400 r/min to 1000 r/min instantly. The actual speed of the motor is shown in
Figure 17.
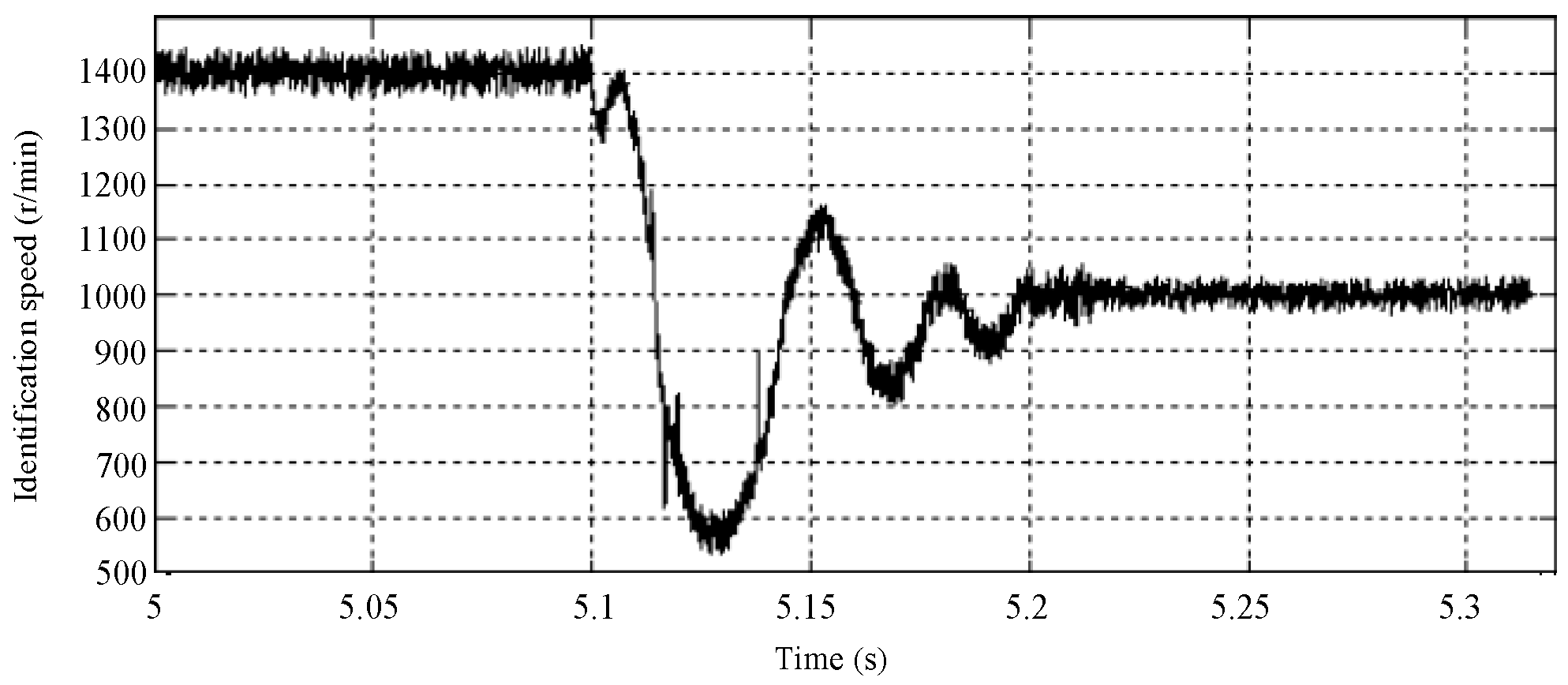
Figure 18 and
Figure 19 show the estimation result in the situation of speed mutation of Q-MRAS algorithm and improved Q-MRAS method, respectively. From the two figures above, both of the methods can roughly estimate the actual speed. However, the tracking performance of the improved algorithm is better in the steady state condition and the switching state condition.
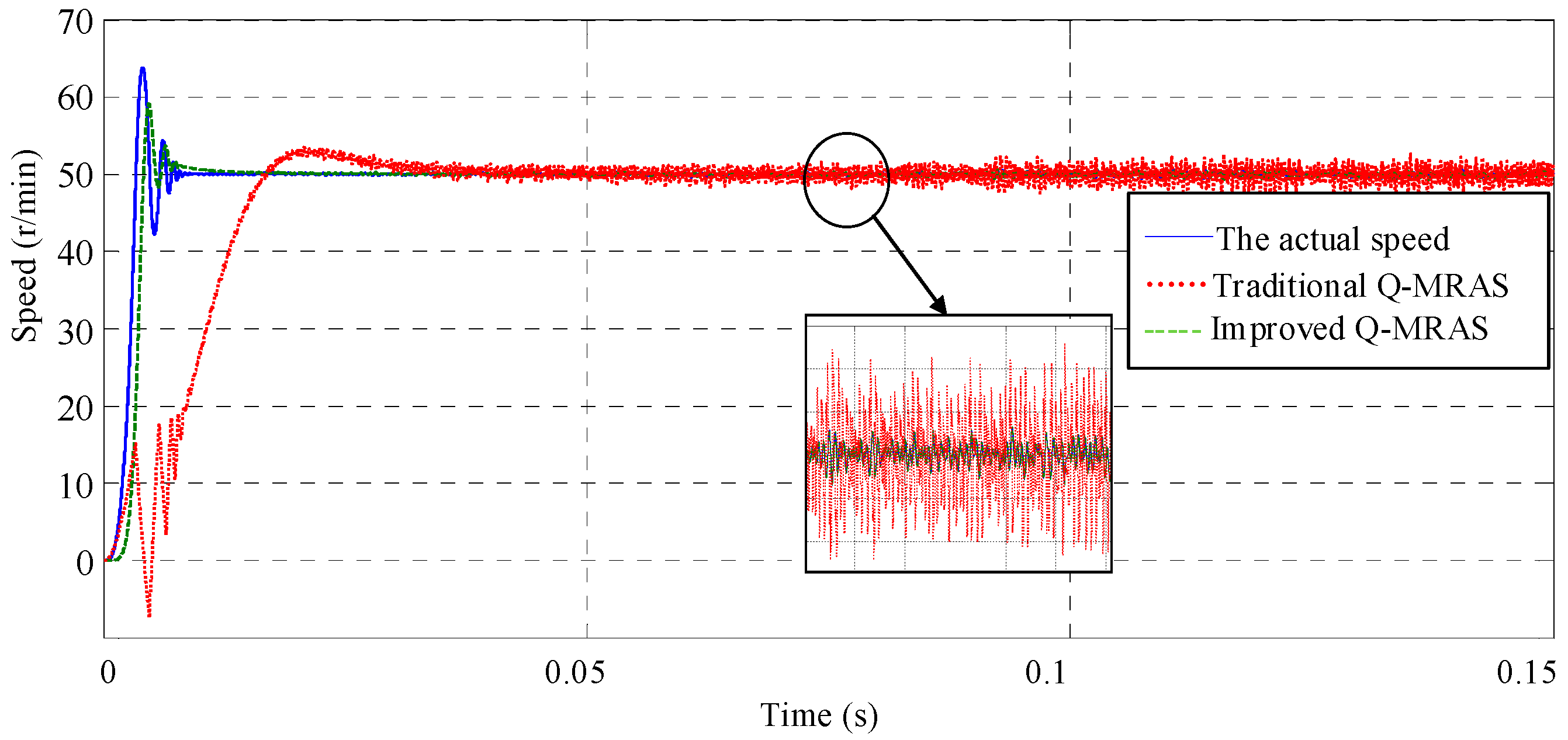
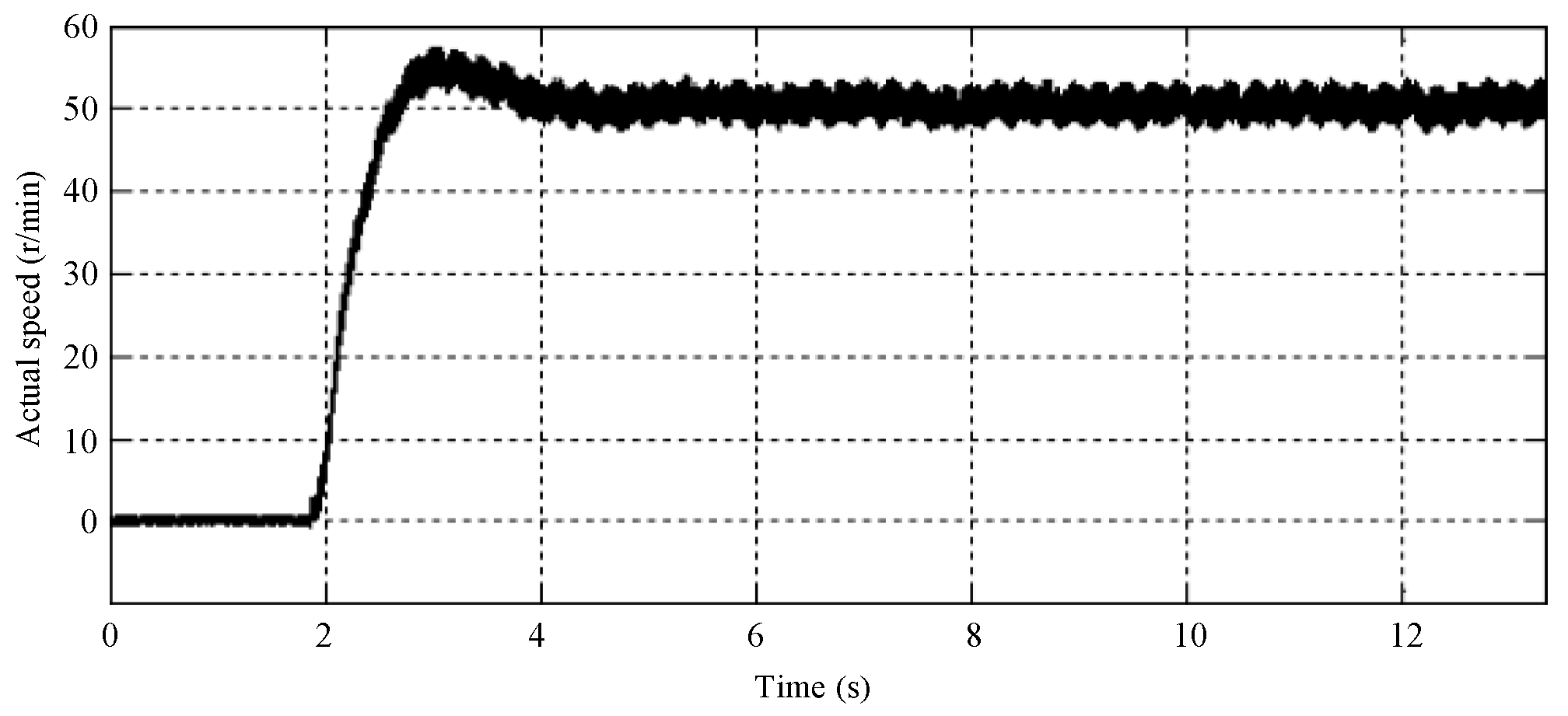
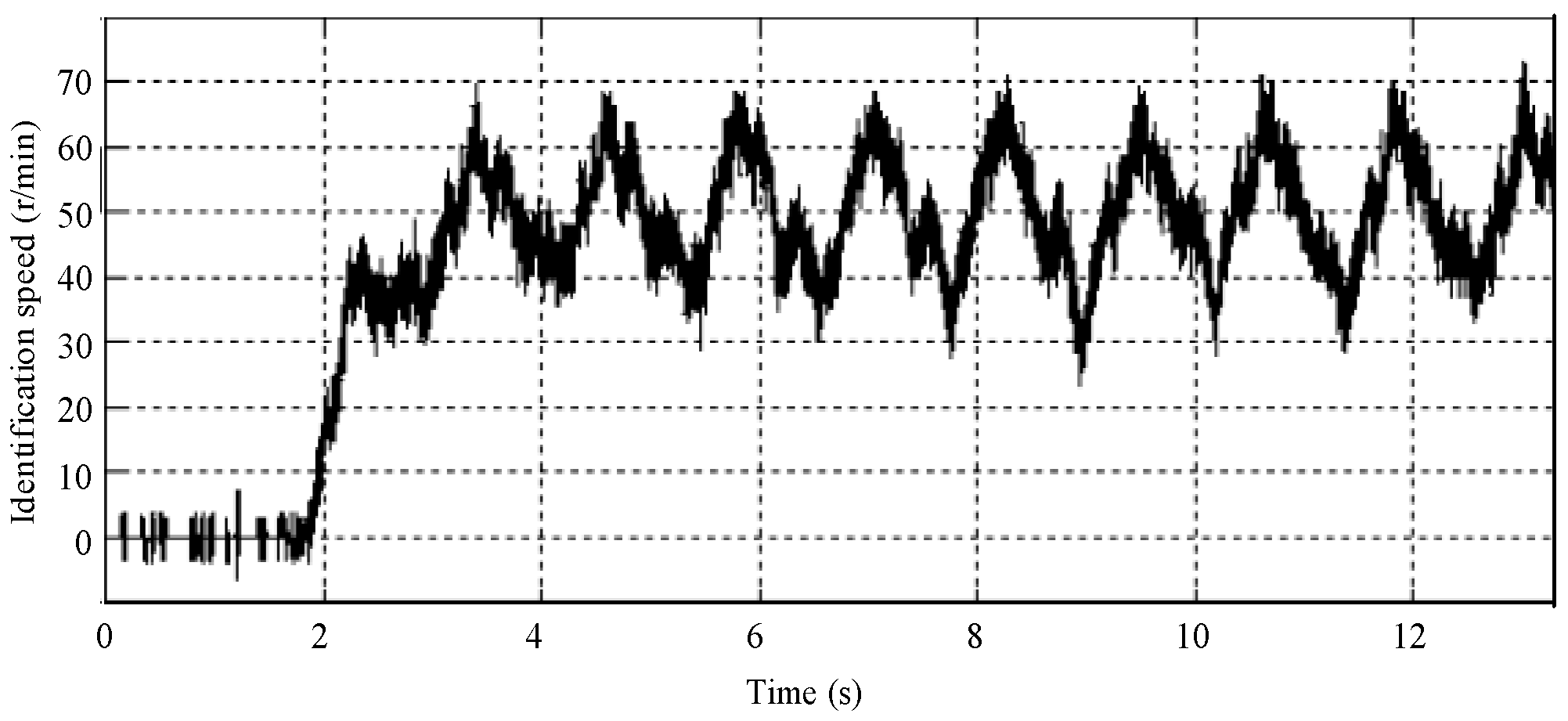
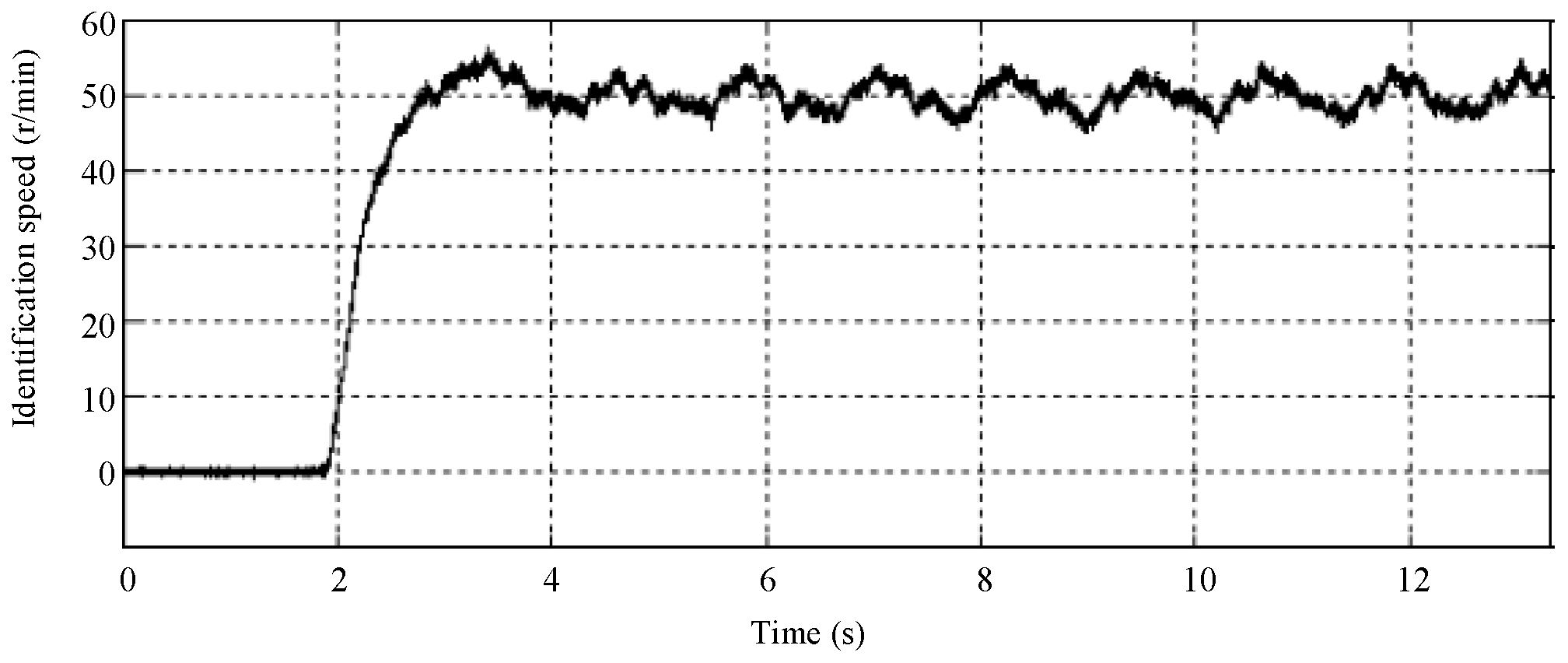
5.3. The Low-Speed Estimation Experiment
In order test the performance of the two algorithms when running in the low speed condition, the zero-load running condition is set as follows: the speed is 50 r/min and the load is 0 Nm. The fluctuation of the actual speed is shown in
Figure 20.
Figure 21 and
Figure 22 show the estimation algorithm result of the Q-MRAS method and improved Q-MRAS method in the low speed condition. Both of the results have a greater fluctuation, but the conventional Q-MRAS speed estimation fluctuates greatly. The tracking effect declines greatly because of the distortion in the tracking process of the startup condition. However, the improved algorithm can track the speed better, which has a significant relationship with the variation of the motor parameters. The accuracy of the conventional Q-MRAS algorithm will decline. The fluctuation in the steady state of the improved Q-MRAS system is related to the variation of the rotator time constant in the indirect vector controlling system. The results of the error in the steady state are compared and analyzed in
Figure 23. The fluctuation of the conventional Q-MRAS is within ±40%. The estimation accuracy of the improved algorithm in the steady state performs well in the low-speed condition.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






















