Development and Analysis of a Novel Spherical 2-Degree-of-Freedom (2-DOF) Hybrid Stepping Motor

Abstract
:1. Introduction
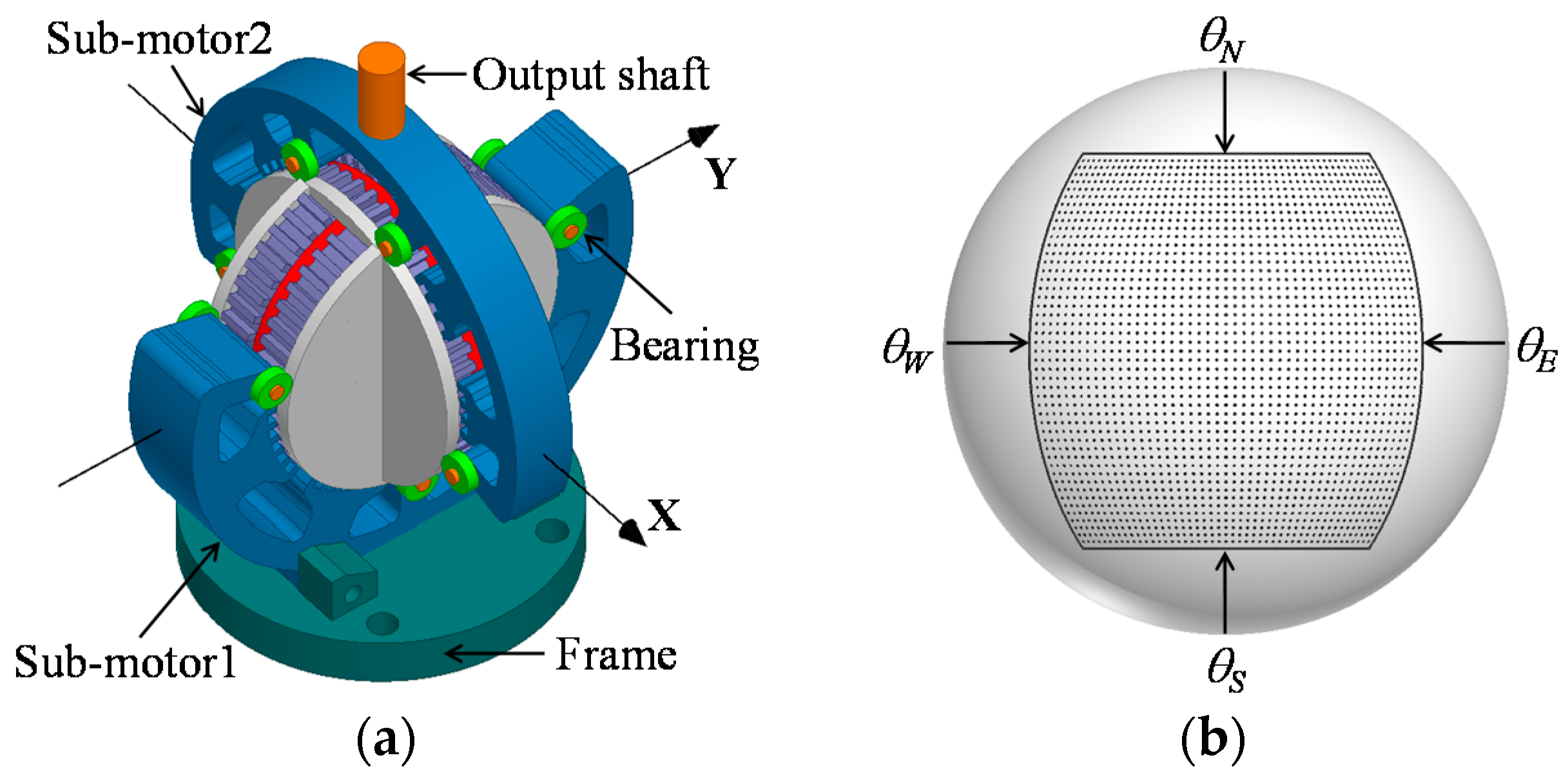
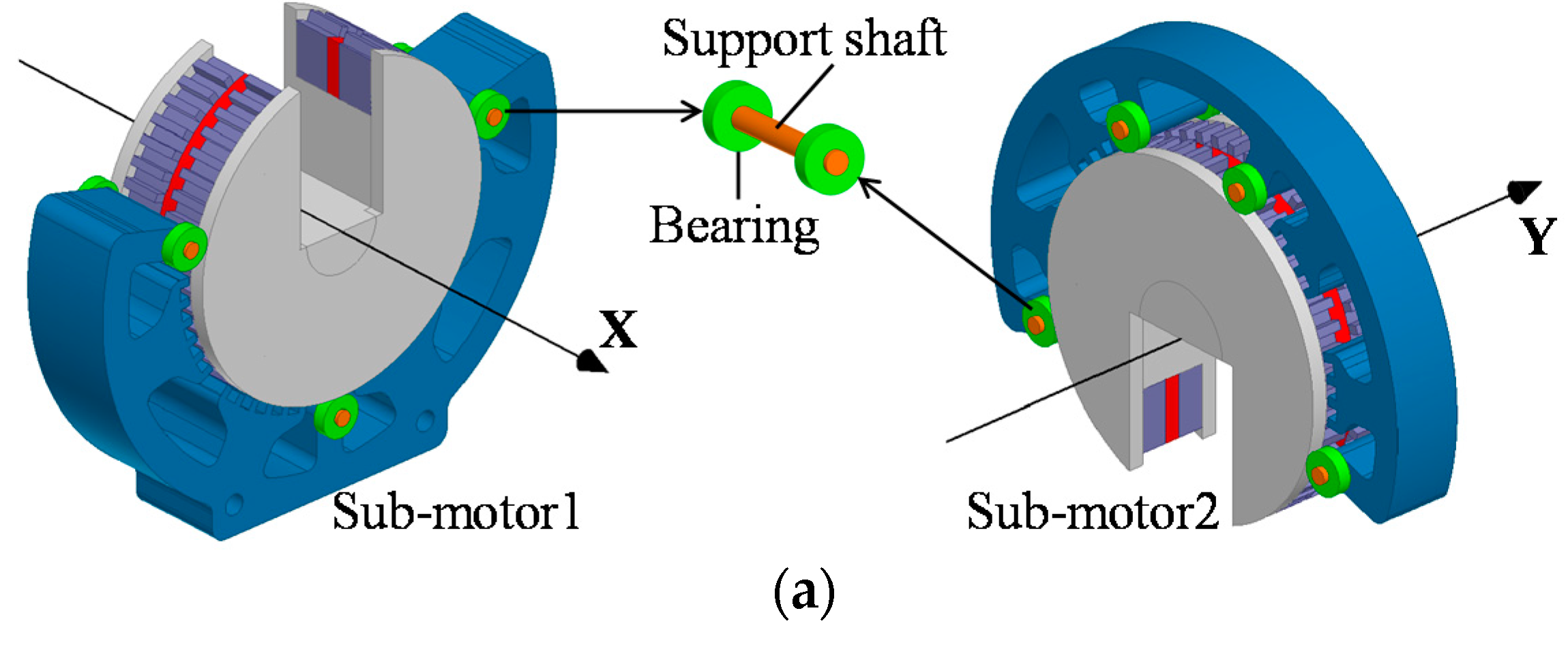
2. Description of the Spherical 2-DOF Hybrid Stepping Motor
3. 2-D Equivalent Magnetic Field Analysis
3.1. 3-D Equivalent Motor Model
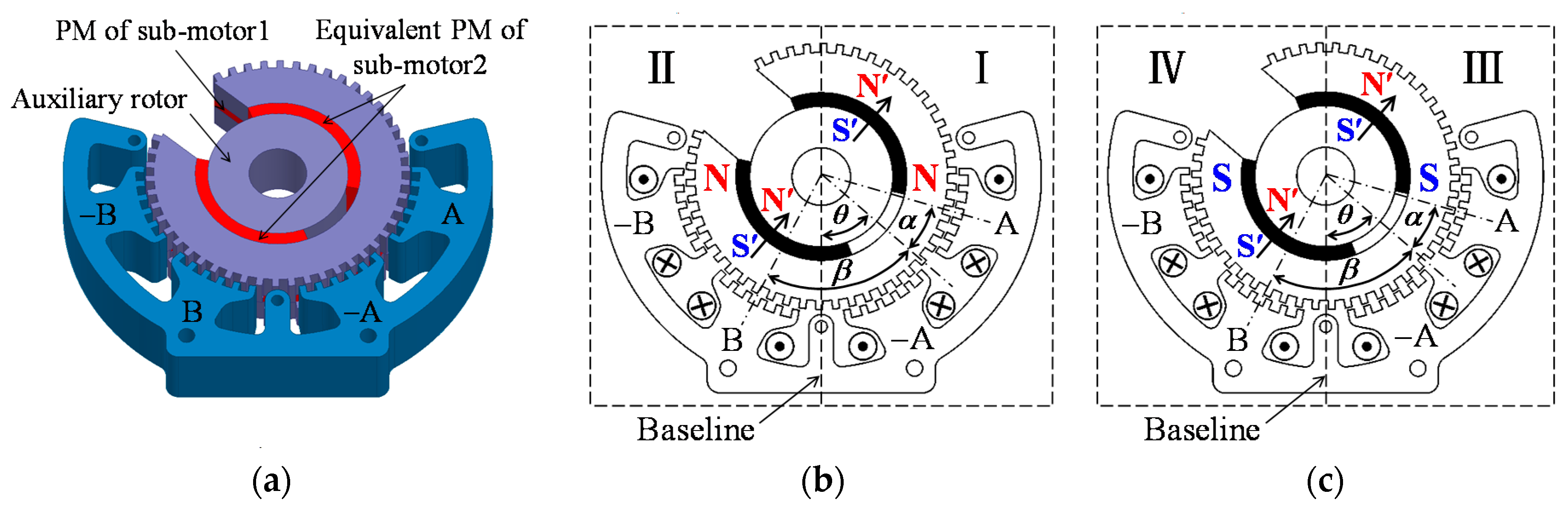
3.2. Acurate 2-D Equivalent Motor Model
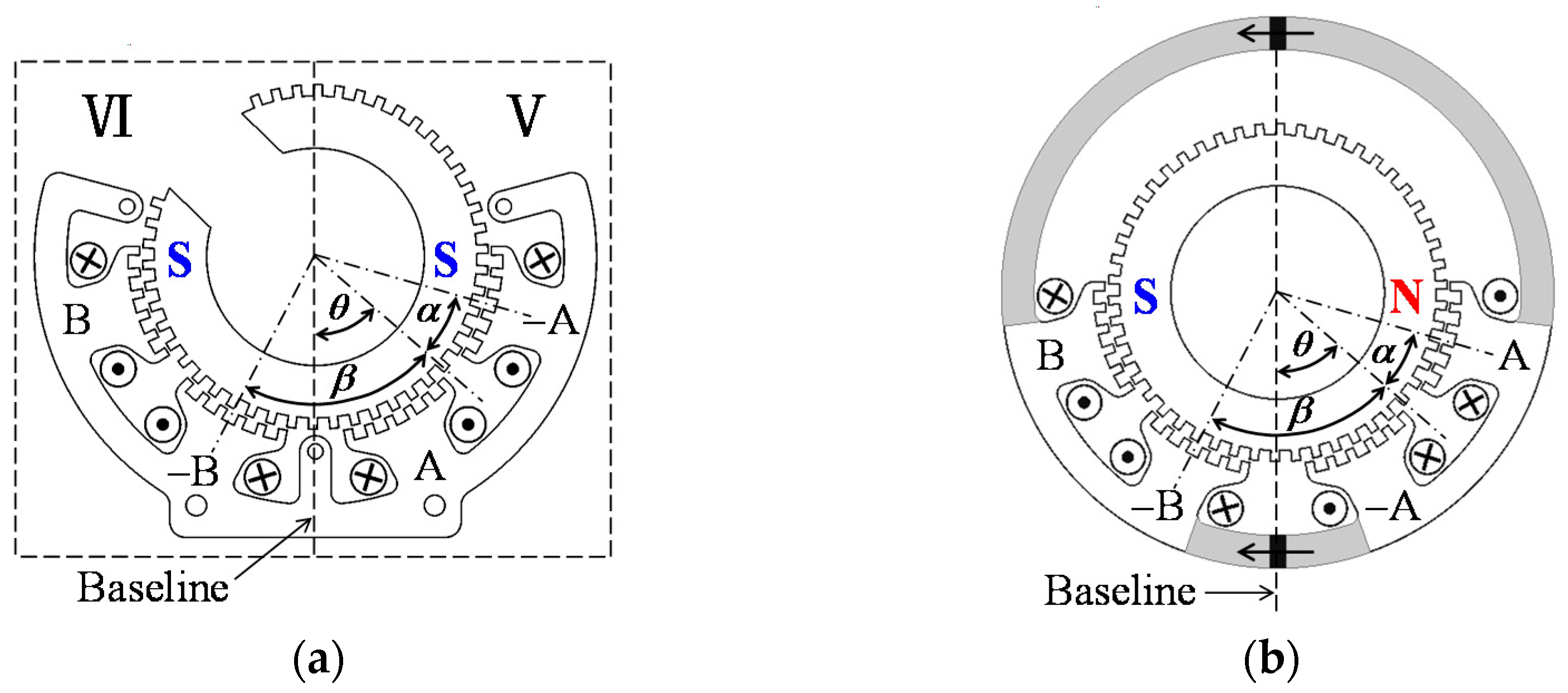
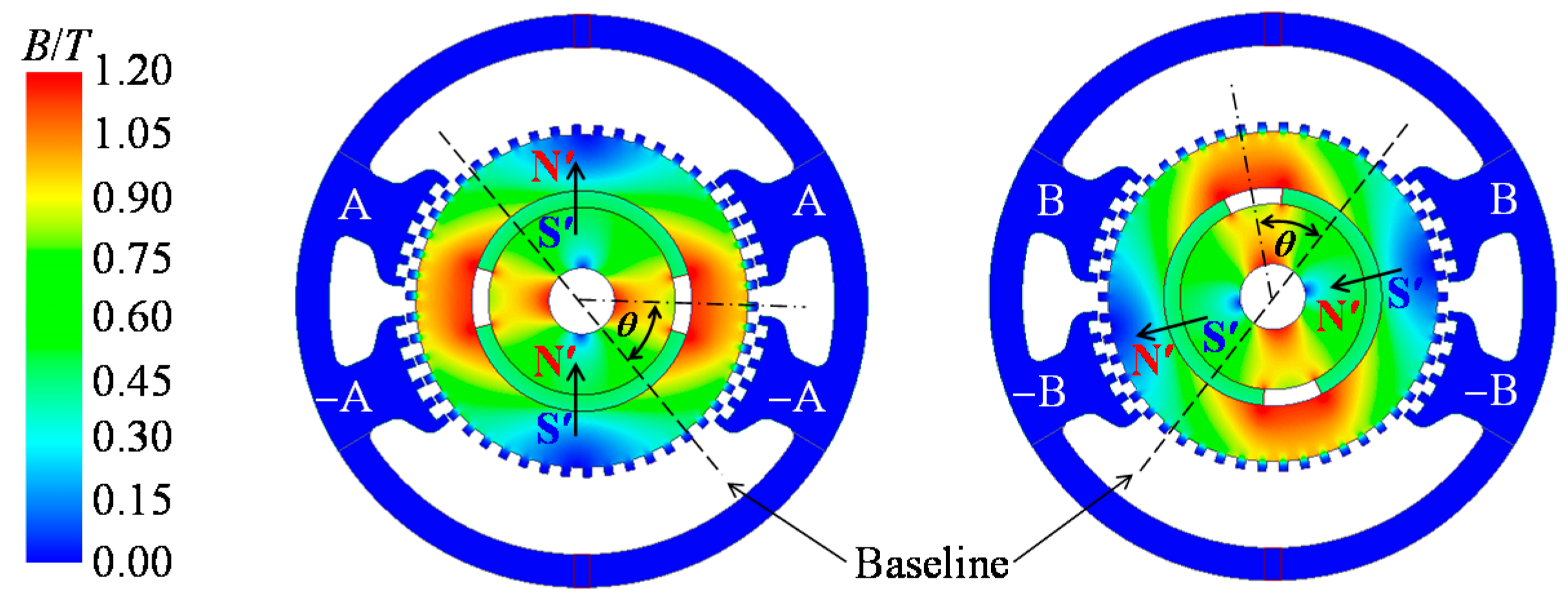
- The rotor polarities N, S are equivalently produced by the two stator PMs symmetrically placed in the stator yoke and inversely magnetized.
- The two rotor PMs have the same polarities and relative position with respect to stator pole A (as illustrated by angle α) as those of part I.
- The right half of the model is exactly the same as part I, which has opposite rotor polarity and inverse winding direction (to the two stator poles separated by 180°) to the left half, thus the electromagnetic properties of the two half models are equal according to Equation (2).
- The stator and rotor core length is one half the rotor core length of part I.
- The influence of mutual inductance is small enough to be neglected.
- The sum of calculation results of all the 2-D models corresponding to each part can be directly applied to the actual motor, without any post-processing.
- It is suitable for solving motor’s static and steady state problem and analyzing the influence of PM leakage flux between two sub-motors, whereas unable for the transient problem, because of each model is the single-phase motor and cannot realize the two-phase operation.
3.3. Simplified 2-D Equivalent Motor Model
4. FEA and Experimental Verification
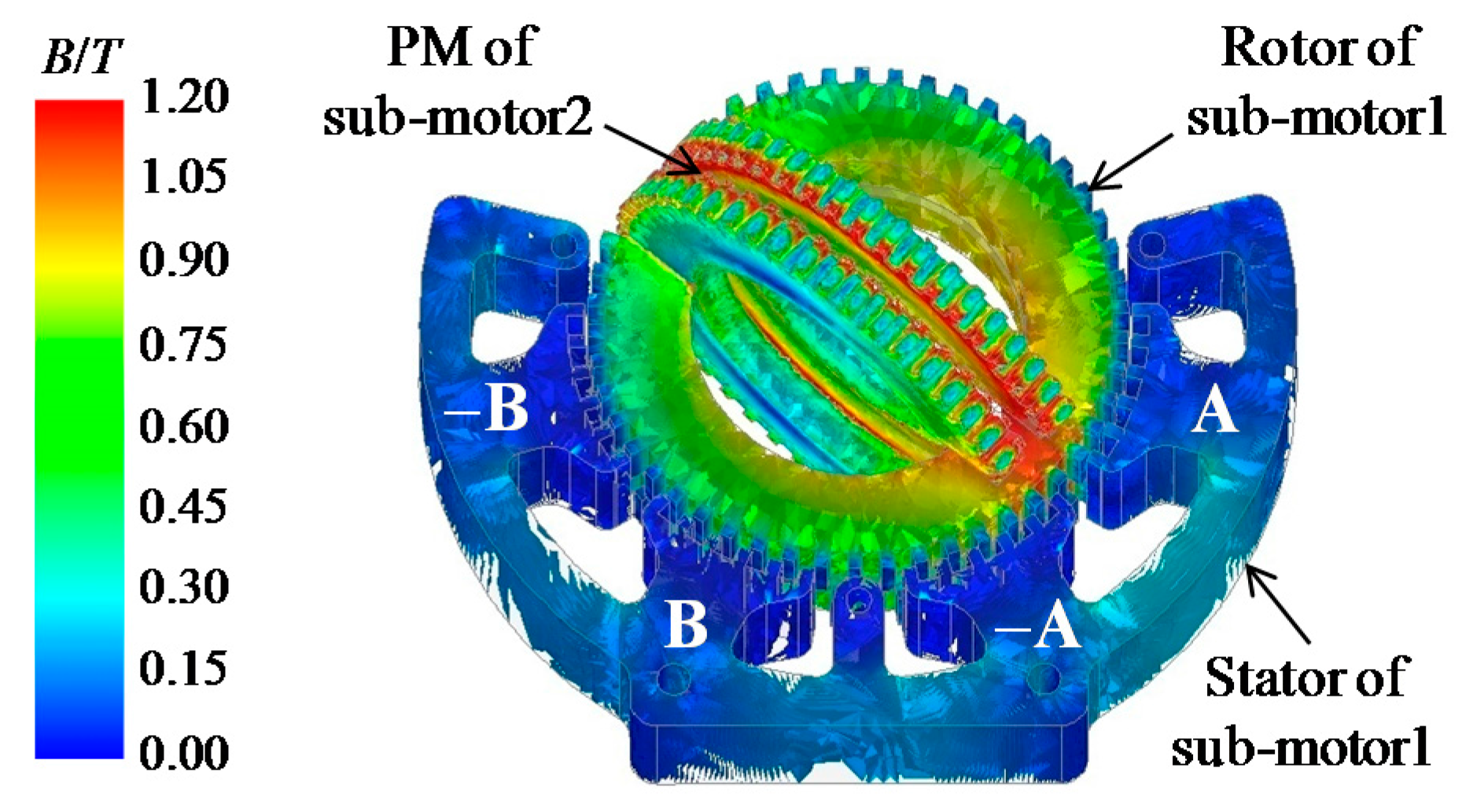
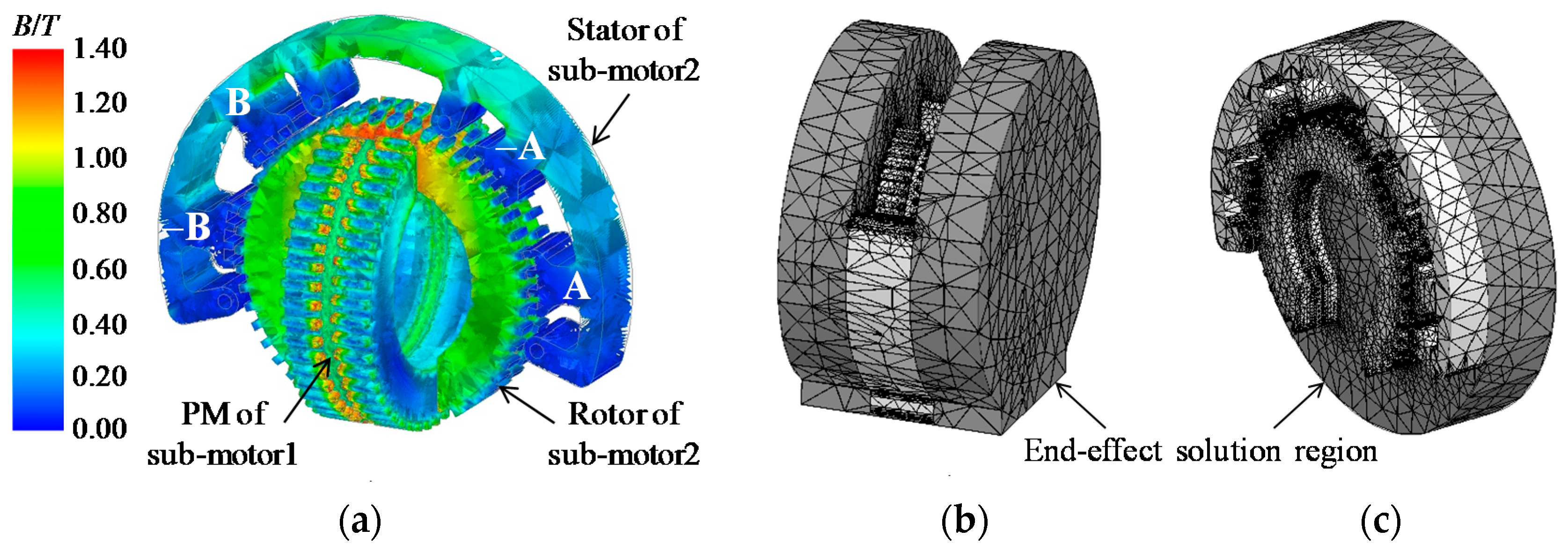
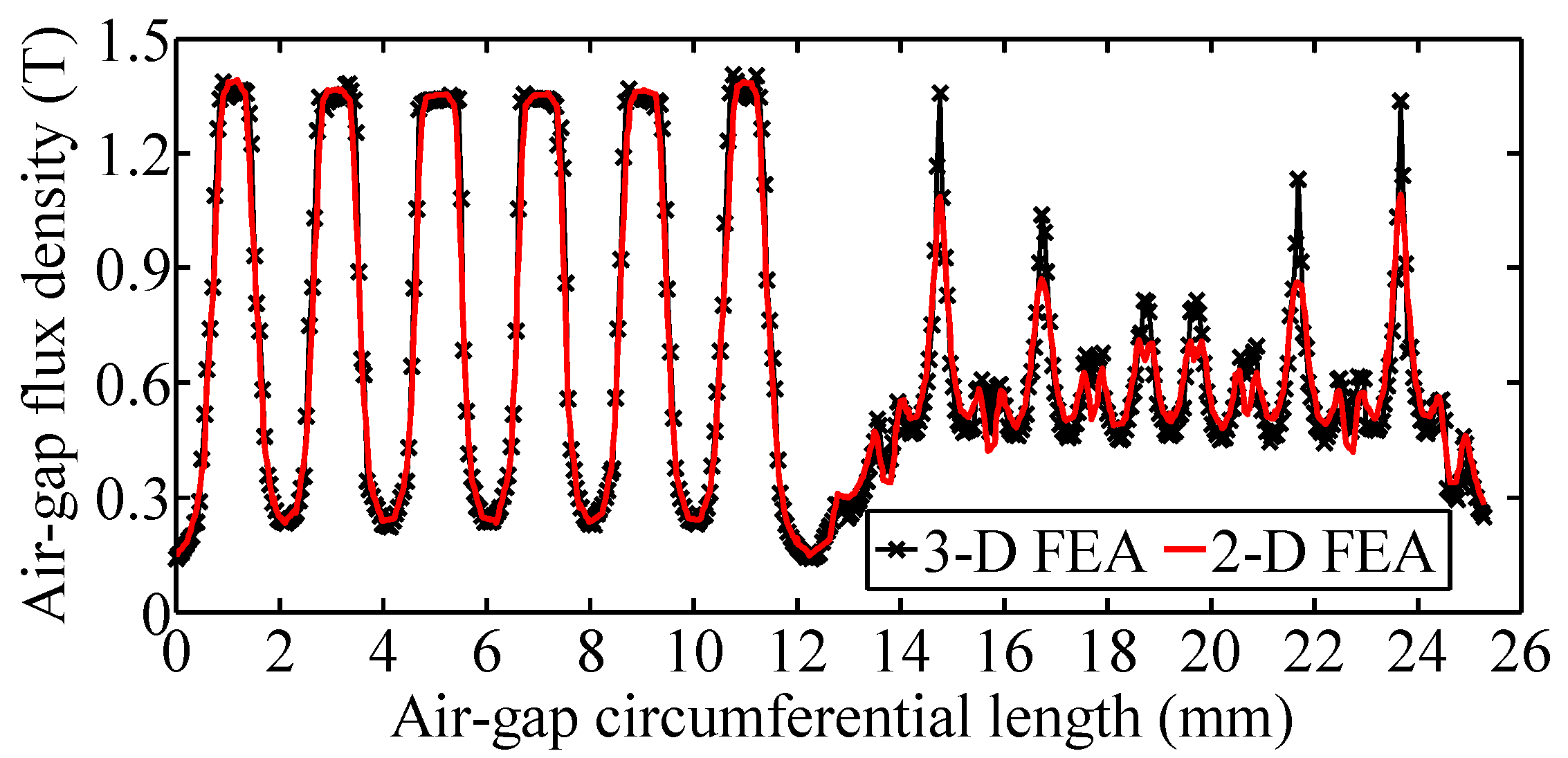
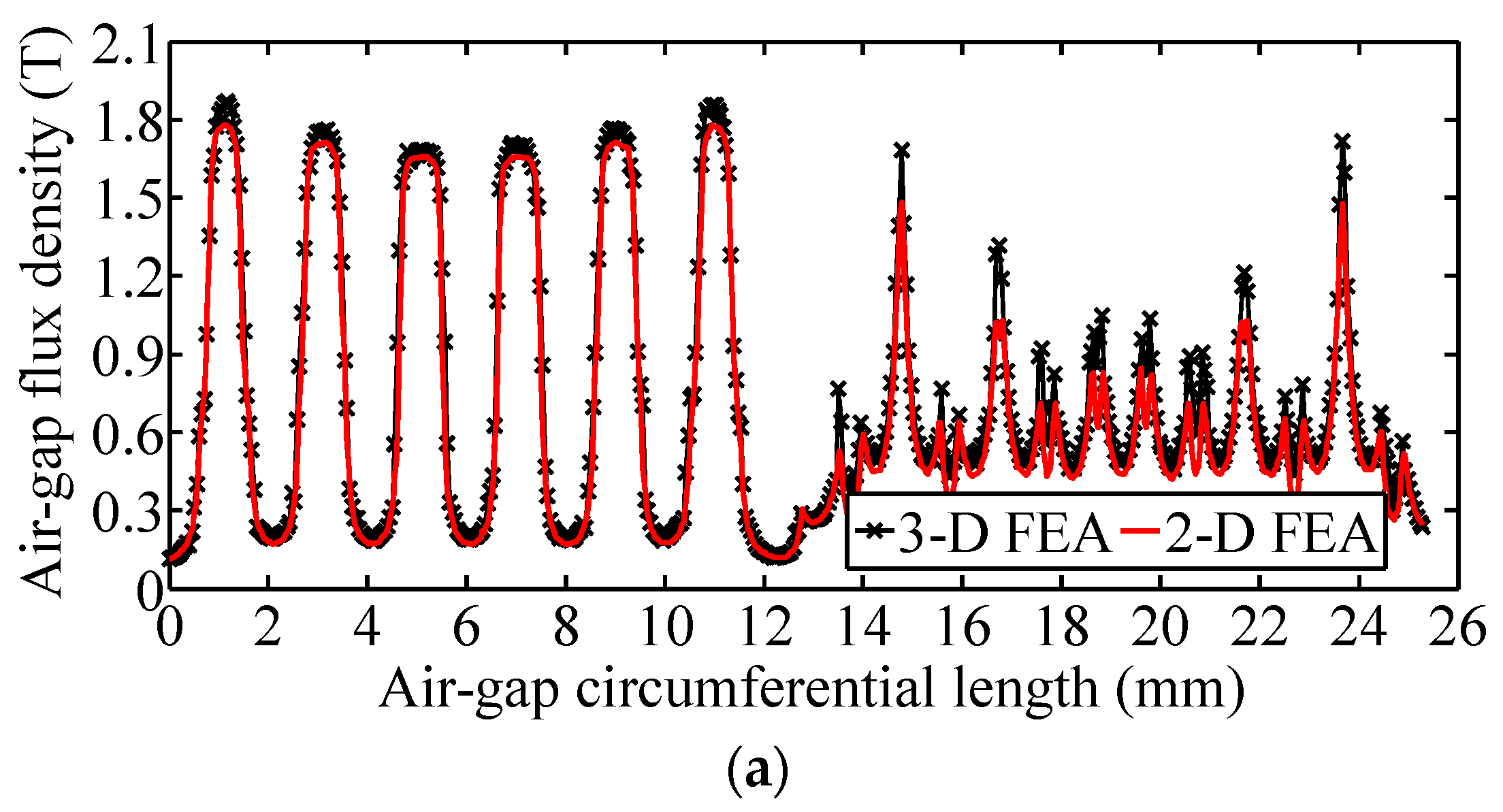
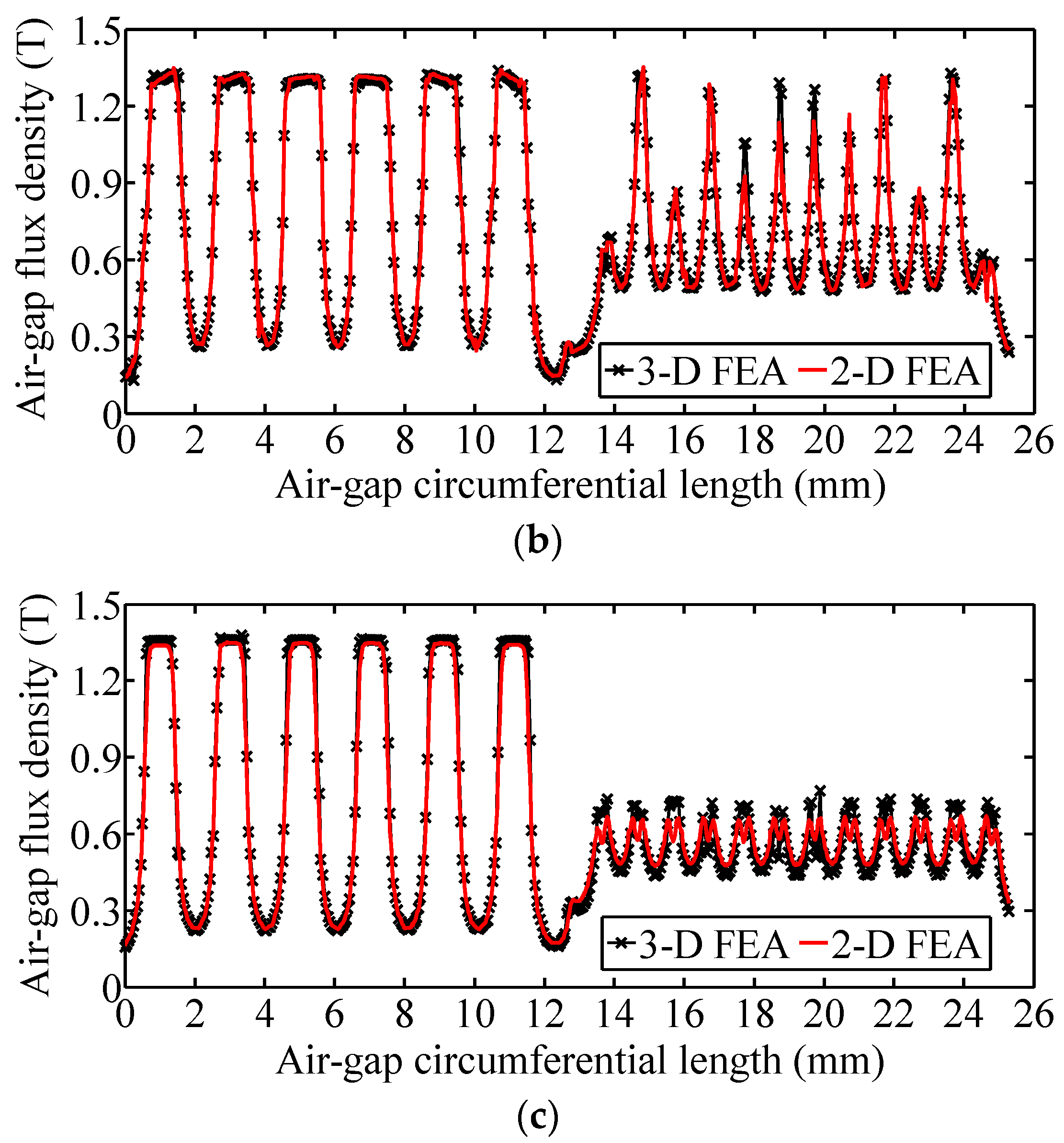
4.1. 3-D FEA Verification of the 2-D Equivalent Motor Model
4.2. Experimental Results
5. Performance Analysis by 2-D FEA
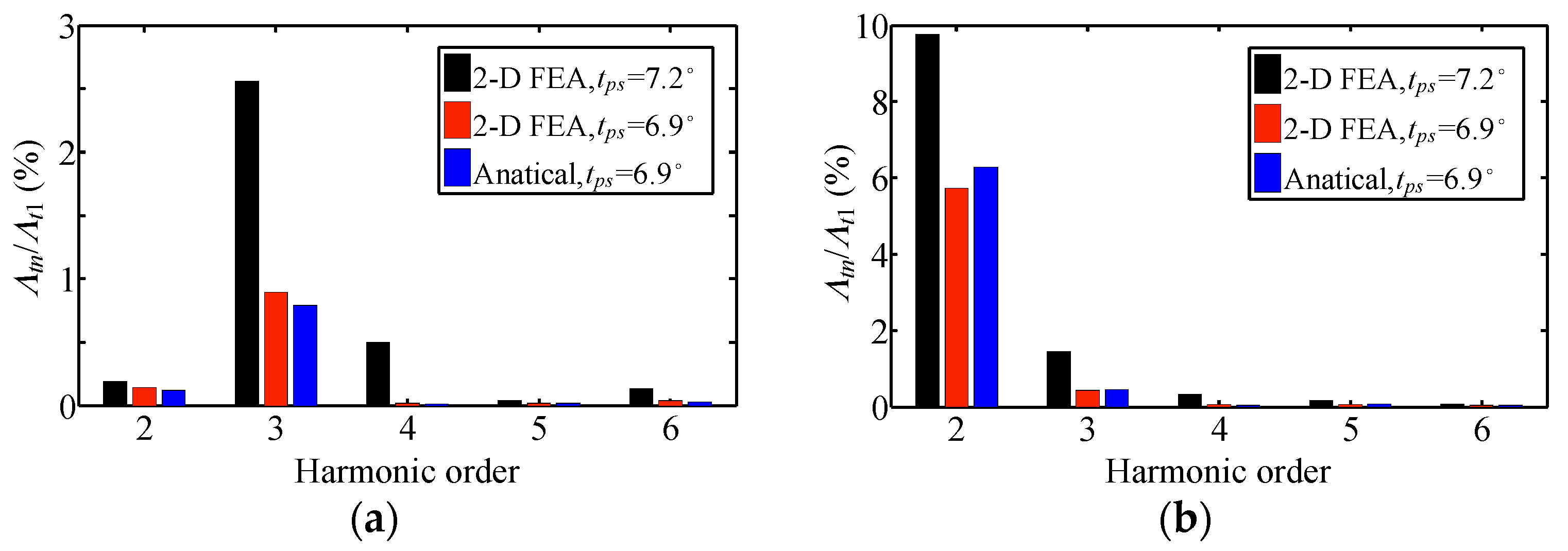
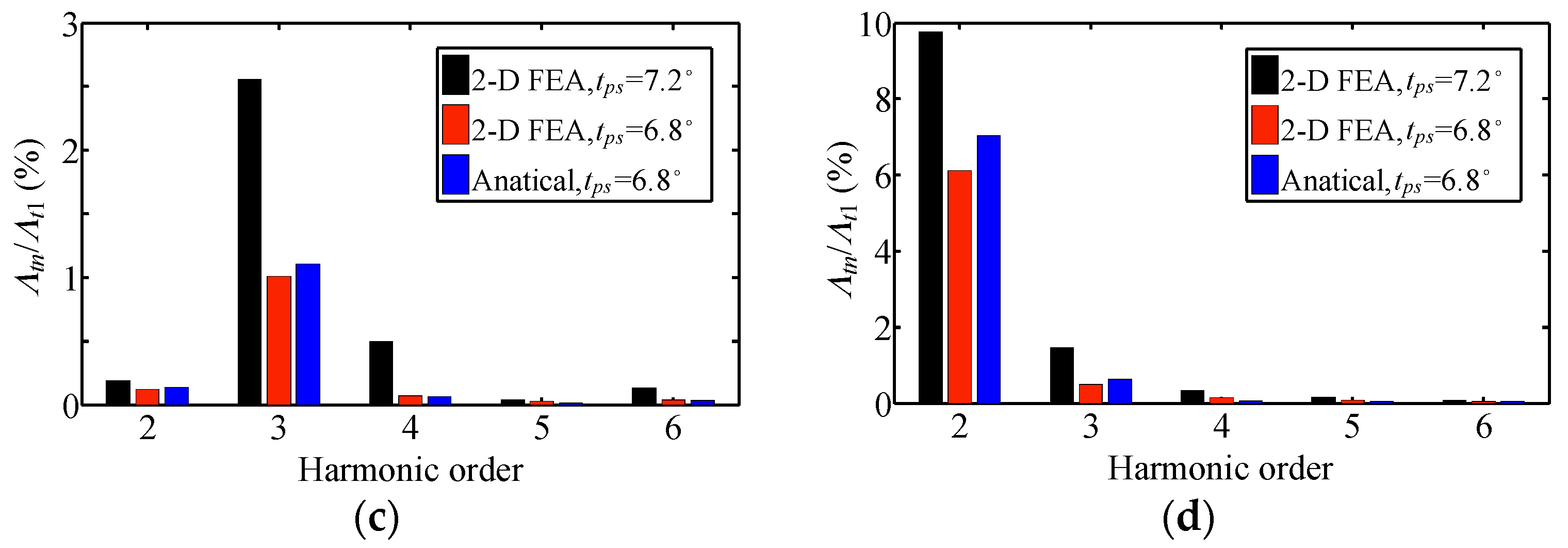
5.1. Harmonic Analysis of Tooth-Layer Permeances
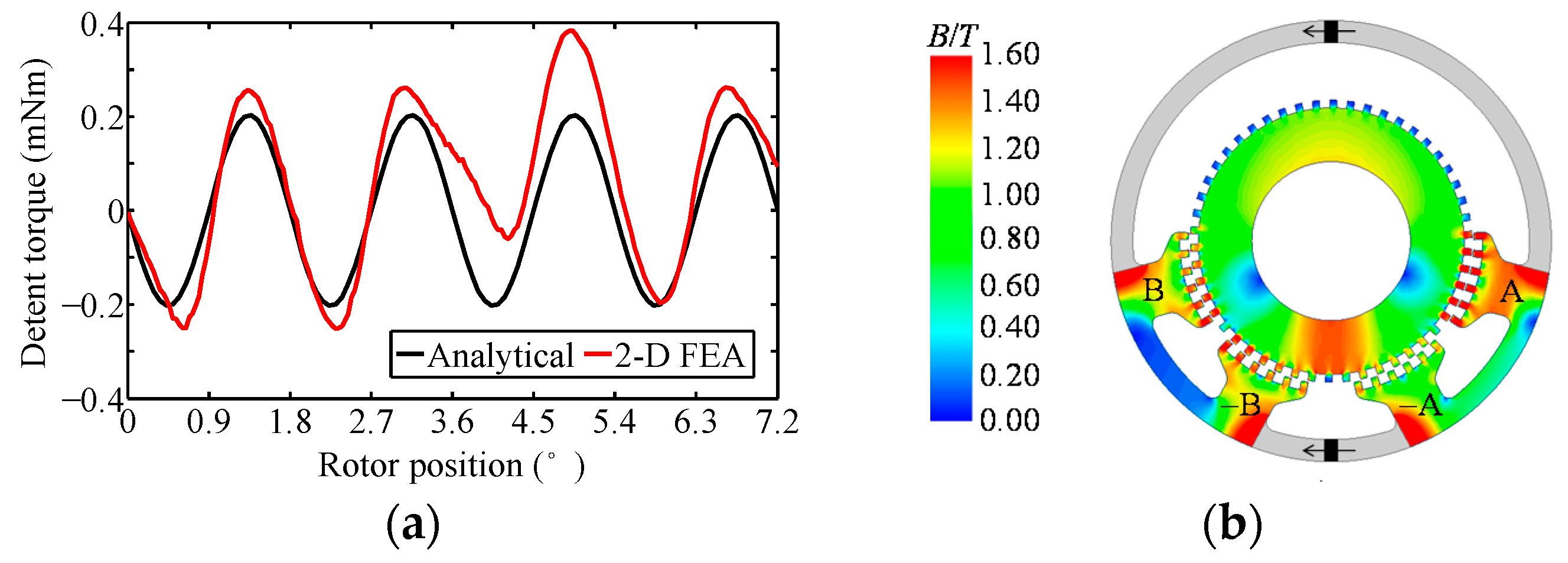
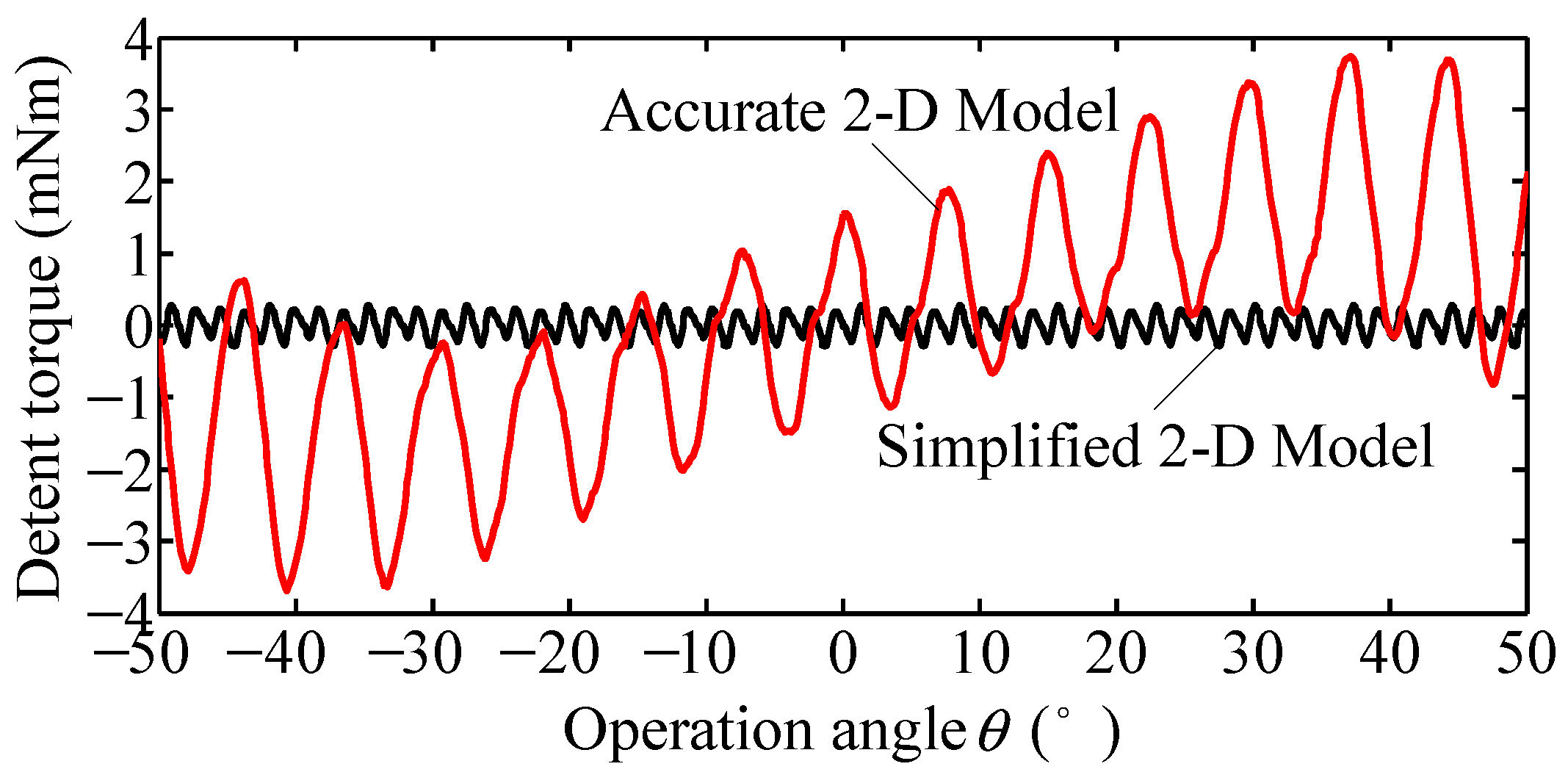
5.2. Detent Torque
5.3. Holding Torque and Torque-angle Property
5.4. Pull-out Torque
5.5. Unbalanced Force
6. Conclusions
- The developed 2-DOF motor has advantages such as simple assembling, relatively simple and compact mechanical structure, easy open-loop control, etc., whereas it has the disadvantages of relatively lower mechanical robustness and higher frictional resistance due to the specially designed bearing structure, which should be further improved via the bearing structure optimal design to meet the requirements for practical engineering applications.
- The coupling magnetic field between two sub-motors is mainly the PM leakage flux produced at the PM opening place of each sub-motor, which mainly influences the rotor’s magnetic field distribution and can lead to performance reduction, e.g., increases torque ripple and reduces positioning resolution, and which should be minimized via optimal design.
- The accurate 2-D equivalent motor model can take into account of the mutual influence of PM leakage flux between the two sub-motors, whereas is only suitable for solving static and steady state problem. The simplified 2-D equivalent motor model can realize 2-phase operation and solve the transient problem, which is more universally used for expected situations where the mutual influence of PM leakage flux can be almost neglected via optimal design.
- The proposed 2-D equivalent magnetic field analysis method is characterized by time-saving, high accuracy and good versatility, its calculation error produced at high currents situation is mainly caused by different PM and current magnetic field distribution characteristics between the 2-D and 3-D model, which can be corrected by adjusting the dimension of stator pole and yoke region of the 2-D model with the variation of winding currents.
- The unbalanced force caused by gravity effect can be almost neglected, whereas the unilateral magnetic pull is relatively big to the motor’s volume, which may cause some problems such as vibration and noise during the operation, especially at high speed.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Williams, F.C.; Laithwaite, E.R.; Eastham, J.F. Development and design of spherical induction motors. Proc. Inst. Elect. Eng. 1959, 106, 471–847. [Google Scholar] [CrossRef]
- Davey, K.; Vachtsevanos, G.; Powers, R. The analysis of fields and torques in spherical induction motors. IEEE Trans. Magn. 1987, 23, 273–282. [Google Scholar] [CrossRef]
- Lee, K.M.; Kwan, C.K. Design concept development of a spherical stepper for robotic applications. IEEE Trans. Robot. Autom. 1991, 7, 175–181. [Google Scholar] [CrossRef]
- Wang, W.; Wang, J.; Jewell, G.W.; Howe, D. Design and control of a novel spherical permanent magnet actuator with three degrees of freedom. IEEE/ASME Trans. Mechatron. 2003, 8, 457–468. [Google Scholar] [CrossRef]
- Wang, J.; Jewell, G.W.; Howe, D. A novel spherical actuator: Design and control. IEEE Trans. Magn. 1997, 33, 4209–4211. [Google Scholar] [CrossRef]
- Wang, J.; Wang, W.; Jewell, G.W.; Howe, D. A novel spherical actuator with three degrees-of-freedom. IEEE Trans. Magn. 1998, 34, 2078–2080. [Google Scholar] [CrossRef]
- Chirikjian, G.S.; Stein, D. Kinematic design and commutation of a spherical stepper motor. IEEE/ASME Trans. Mechatron. 1999, 4, 342–353. [Google Scholar] [CrossRef]
- Kahlen, K.; Voss, I.; Priebe, C.; De Doncker, R.W.D. Torque control of a spherical machine with variable pole pitch. IEEE Trans. Power Electron. 2004, 19, 1628–1634. [Google Scholar] [CrossRef]
- Yan, L.; Chen, I.M.; Yang, G.; Lee, K.M. Analytical and experimental investigation on the magnetic field and torque of a permanent magnet spherical actuator. IEEE/ASME Trans. Mechatron. 2006, 11, 409–419. [Google Scholar]
- Putwanto, E.; Toyama, S. Control Method of a Spherical Ultrasonic Motor. In Proceedings of the 2003 International Conference on Advanced Intelligent Mechatronics (AIM), Kobe, Japan, 20–24 July 2003; pp. 1321–1326. [Google Scholar]
- Takemura, K.; Maeno, T. Characteristics of an Ultrasonic Motor Capable of Generating a Multi-Degrees of Freedom Motion. In Proceedings of the 2000 International Conference on Robotics and Automation (ICRA), San Francisco, CA, USA, 24–28 April 2000; pp. 3660–3665. [Google Scholar]
- Shi, L.; Motomura, Y. A Small-Sized Spherical Stepping Motor and the Controls. In Proceedings of the 2003 International Conference on Electrical Machines and Systems (ICEMS), Beijing, China, 9–11 November 2003; pp. 191–194. [Google Scholar]
- Yano, T.; Suzuki, T. Basic characteristics of the small spherical stepping motor. In Proceedings of the 2002 International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; pp. 1980–1985. [Google Scholar]
- Matsui, N.; Nakamura, M.; Kosaka, T. Instantaneous torque analysis of hybrid stepping motor. IEEE Trans. Ind. Appl. 1996, 32, 1176–1182. [Google Scholar] [CrossRef]
- Lim, K.C.; Hong, J.P.; Kim, G.K. Characteristic analysis of 5-phase hybrid stepping motor considering the saturation effect. IEEE Trans. Magn. 2001, 37, 3518–3521. [Google Scholar]
- Jang, K.B.; Lim, S.Y.; Lim, T.B.; Jin, C.S.; Cho, Y.H.; Kim, Y.T.; Lee, J. 2-D FE analysis of hybrid stepping motor using virtual magnetic barrier. IEEE Trans. Magn. 2003, 39, 3268–3270. [Google Scholar] [CrossRef]
- Kang, S.G.; Lieu, D.K. Torque Analysis of Combined 2D FEM and Lumped Parameter Method for a Hybrid Stepping Motor. In Proceedings of the 2005 International Conference on Electric Machines and Drives, San Antonio, TX, USA, 15 May 2005; pp. 1199–1203. [Google Scholar]
- Stuebig, C.; Ponick, B. Comparison of calculation methods for hybrid stepping motors. IEEE Trans. Ind. Appl. 2012, 48, 2182–2189. [Google Scholar] [CrossRef]
- Kosaka, T.; Pollock, C.; Matsui, N. 3 Dimensional Finite Element Analysis of Hybrid Stepping Motors Taking Inter-Lamination Gap into Account. In Proceedings of the 2004 International Conference on Power Electronics, Machines & Drives (PEMD), Edinburgh, UK, 31 March–2 April 2004; pp. 534–539. [Google Scholar]
- Lu, B.; Xu, Y.; Feng, X.; Gong, X. A New Calculation Method for Electromagnetic Torque of Stepping Motors—Teeth Layer Calculated Torque Method. In Proceedings of the 2014 International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 1652–1656. [Google Scholar]
- Freitas, M.A.A.; Andrade, D.A.; Borges, T.T. Driving the Step Motor with Controlled Phase Currents. In Proceedings of the 1998 International Conference on Power Electronic Drives and Energy Systems for Industrial Growth (PEDES), Perth, Australia, 1–3 December 1998; pp. 493–498. [Google Scholar]
- Lu, B.; Xu, Y. Presentation and performance evaluation of a novel stator-permanent-magnet hybrid stepping motor. Energies 2017, 10, 693. [Google Scholar]
- Rajagopal, K.R.; Singh, B.; Singh, B.P. Optimal tooth-geometry for specific performance requirements of a hybrid stepper motor. IEEE Trans. Magn. 2003, 39, 3010–3012. [Google Scholar] [CrossRef]
- Chau, K.T.; Sun, Q.; Fan, Y.; Cheng, M. Torque ripple minimization of doubly salient permanent-magnet motors. IEEE Trans. Energy Convers. 2005, 20, 352–358. [Google Scholar] [CrossRef]
- Sun, X.; Xue, Z.; Zhu, J.; Guo, Y.; Yang, Z.; Chen, L.; Chen, J. Suspension force modeling for a bearingless permanent magnet synchronous motor using Maxwell stress tensor method. IEEE Trans. Appl. Supercond. 2016, 26, 0608705. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Rated current (A) | 3.2 | Air-gap length (mm) | 0.2 |
| Rotor tooth pitch (°) | 7.2 | End cover diameter (mm) | 32 |
| Step angle (°) | 1.8 | Tooth width/height (mm) | 0.8/1 |
| Stator outer diameter (mm) | 50 | PM outer diameter (mm) | 28 |
| Stator inner diameter (mm) | 32.4 | PM inner diameter (mm) | 20 |
| Rotor outer diameter (mm) | 32 | PM thickness (mm) | 1.5 |
| Rotor inner diameter (mm) | 20 | PM material | N35SH |
| Parameters | Value of Sub-Motor1 | Value of Sub-Motor2 |
|---|---|---|
| Holding torque (mN·m) | 80–85 | 21–24 |
| Operation angle (°) | ±50 | ±45 |
| No. of phase winding turns | 48 | 34 |
| No. of stator teeth per pole | 6 | 4 |
| Stator tooth pitch (°) | 6.9 | 6.8 |
| Stator core length (mm) | 9.5 | 5.5 |
| Rotor core length (mm) | 4 | 2 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, B.; Xu, Y. Development and Analysis of a Novel Spherical 2-Degree-of-Freedom (2-DOF) Hybrid Stepping Motor. Energies 2018, 11, 41. https://doi.org/10.3390/en11010041
Lu B, Xu Y. Development and Analysis of a Novel Spherical 2-Degree-of-Freedom (2-DOF) Hybrid Stepping Motor. Energies. 2018; 11(1):41. https://doi.org/10.3390/en11010041
Chicago/Turabian StyleLu, Binglin, and Yanliang Xu. 2018. "Development and Analysis of a Novel Spherical 2-Degree-of-Freedom (2-DOF) Hybrid Stepping Motor" Energies 11, no. 1: 41. https://doi.org/10.3390/en11010041
APA StyleLu, B., & Xu, Y. (2018). Development and Analysis of a Novel Spherical 2-Degree-of-Freedom (2-DOF) Hybrid Stepping Motor. Energies, 11(1), 41. https://doi.org/10.3390/en11010041