Vibration Characteristics Analysis of Planetary Gears with a Multi-Clearance Coupling in Space Mechanism


Abstract
:1. Introduction
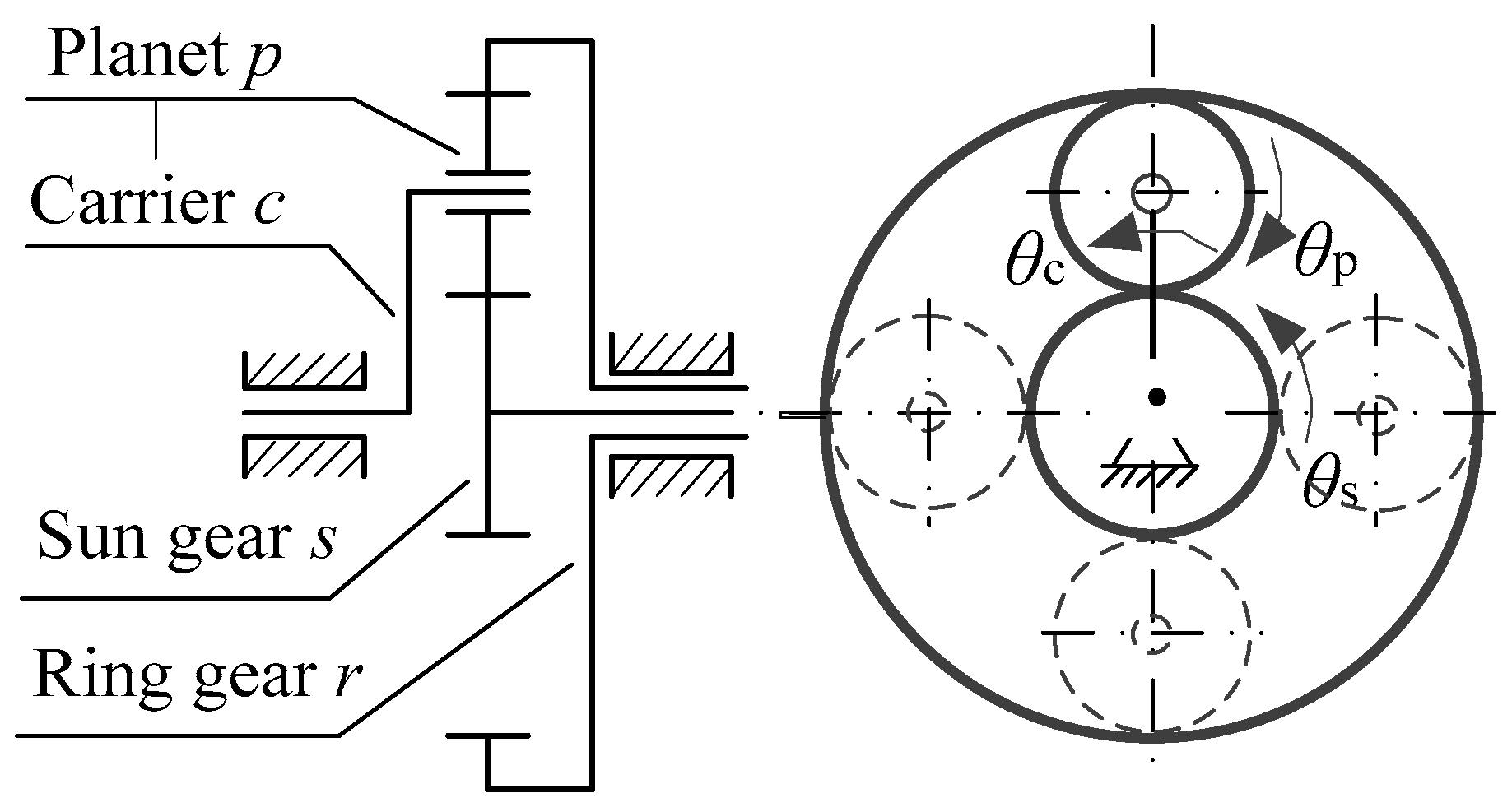
2. Dynamic Modeling of Planetary Gear Drive Joint
- (1)
- Each gear in joints is considered to be a rigid gear, neglecting the plastic deformation during contact collision;
- (2)
- The elastic deformation of drive shaft is neglected, and the only effect of radial run-out caused by bearing clearance on the dynamic characteristics of system is considered;
- (3)
- The joint system is assumed to be a planar system. In other words, the radial vibration at the bearing is equivalent to two-degree-of-freedom translational motion in the gear rotation plane, and the torsional vibration of gear is equivalent to single-degree-of-freedom rotation in the plane of rotation.
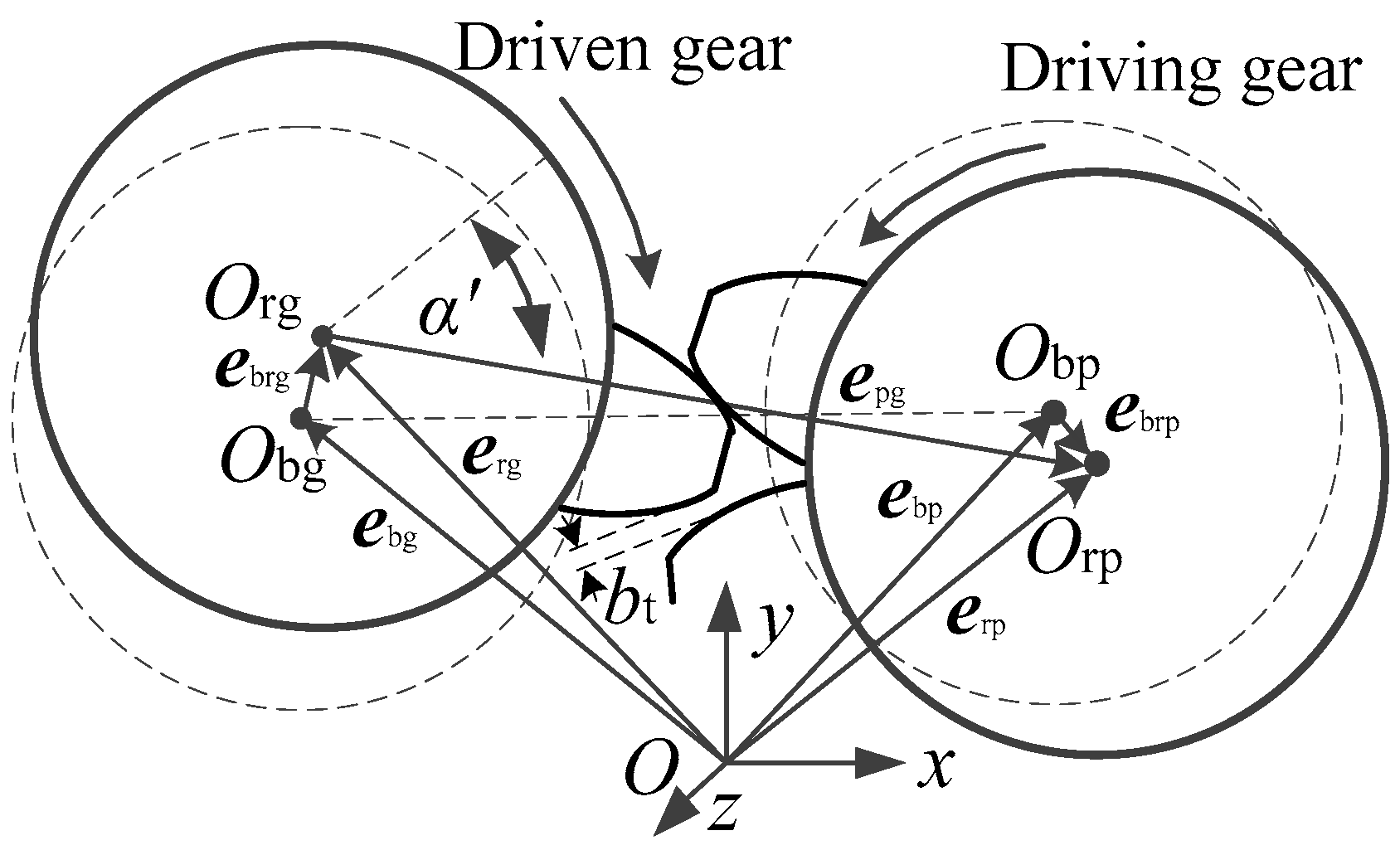
2.1. Multi-Clearance Coupling Model
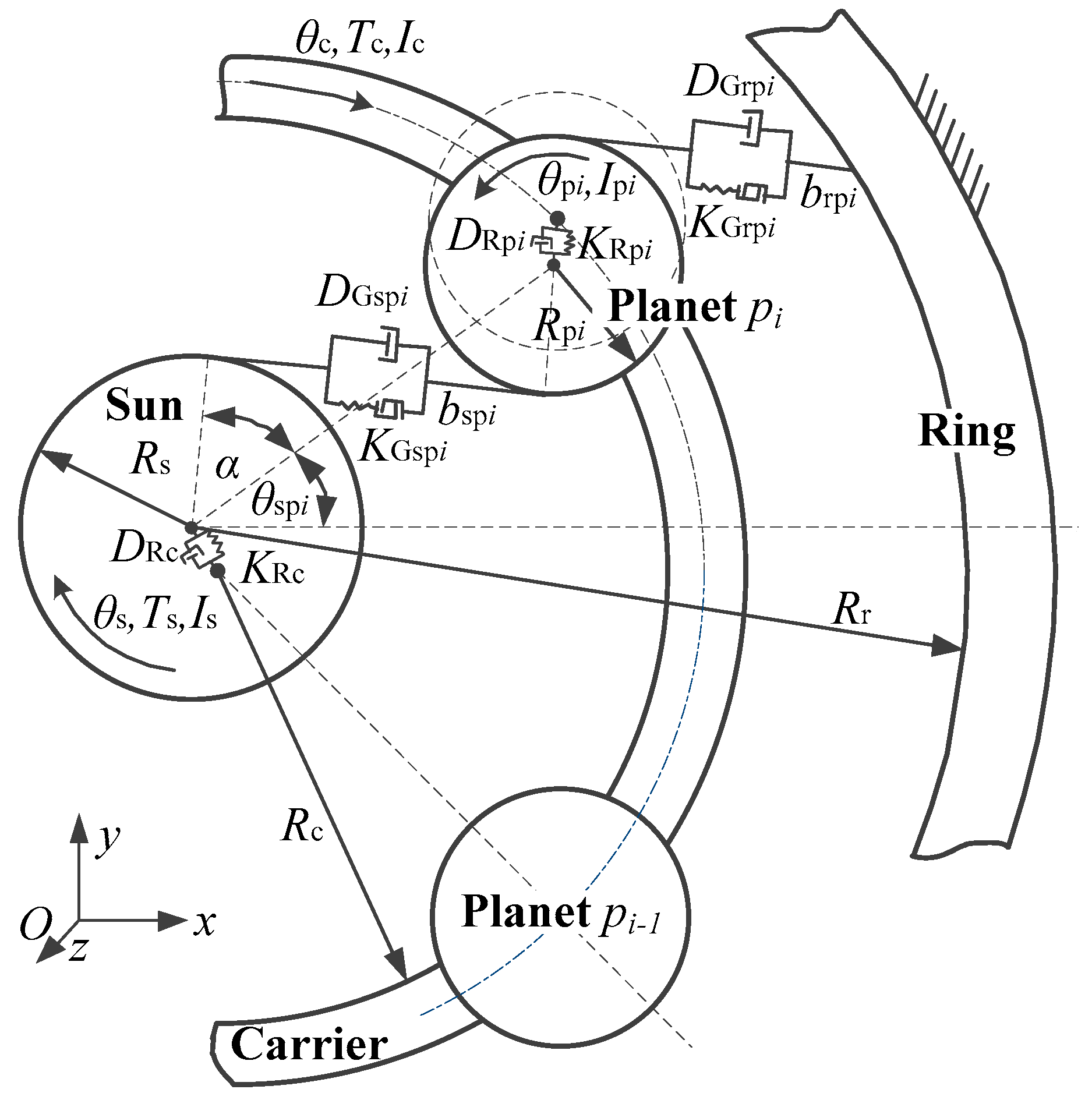
2.2. System Dynamics Model
3. Results
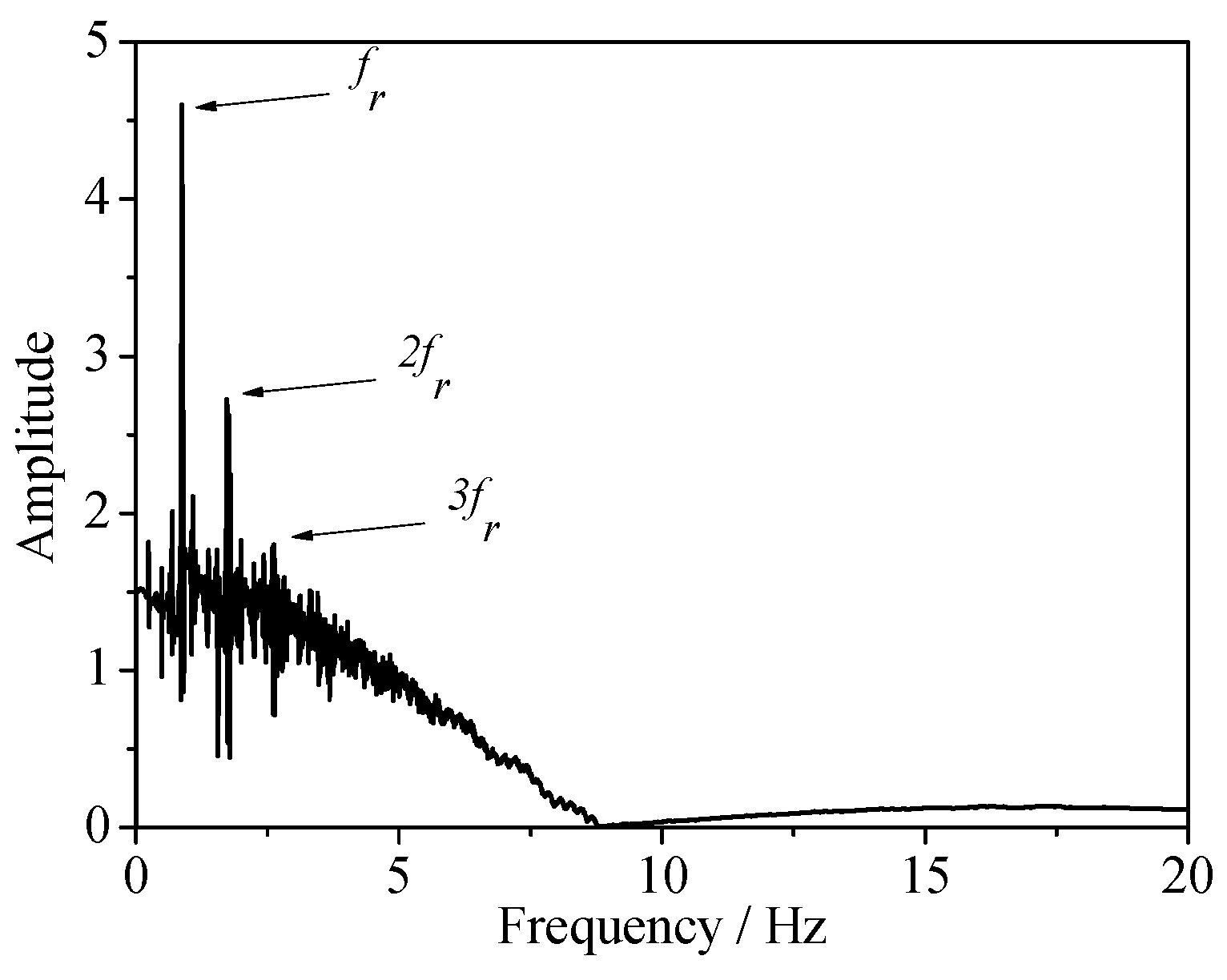
3.1. Analysis of Coupling Vibration of Transmission Joint
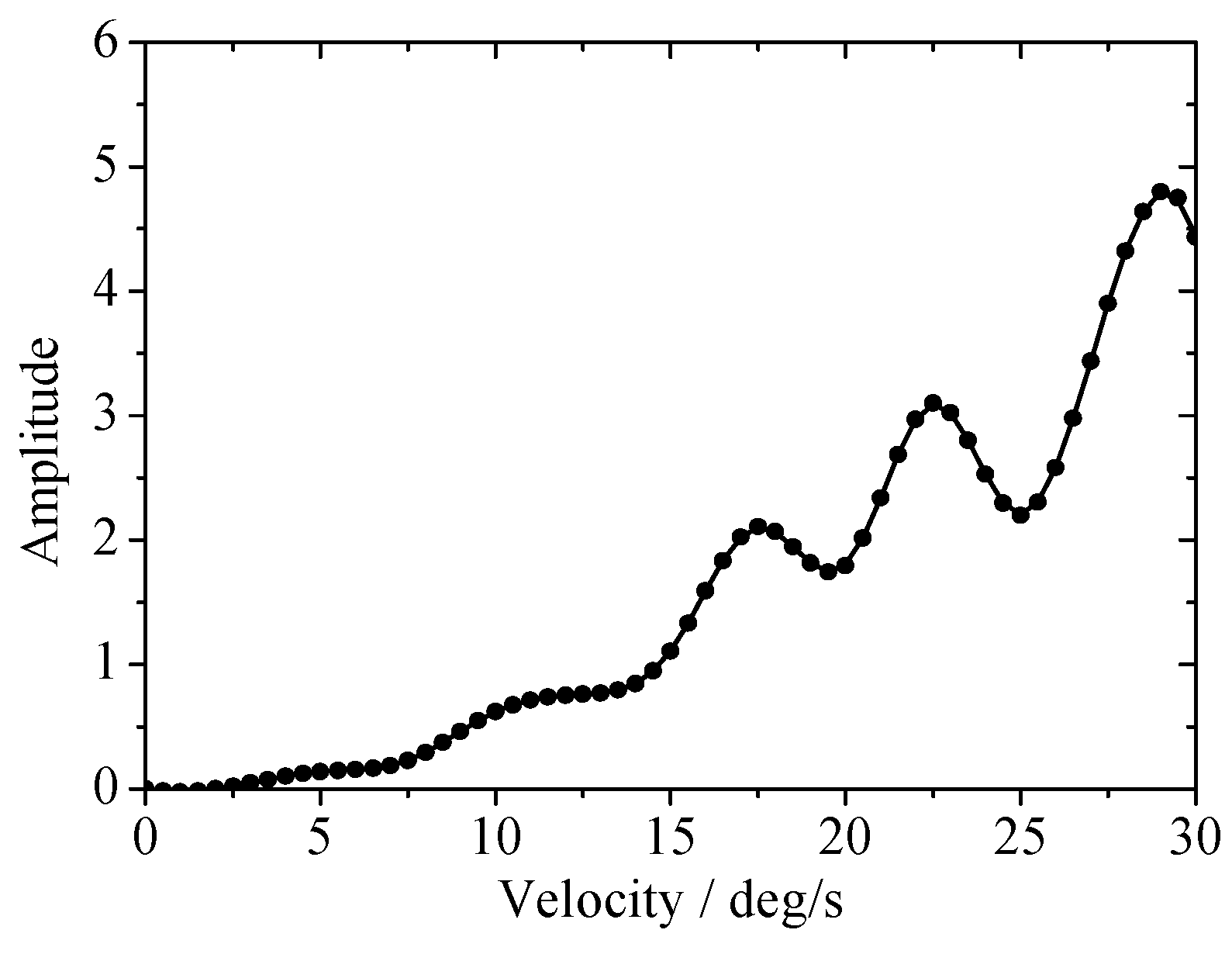
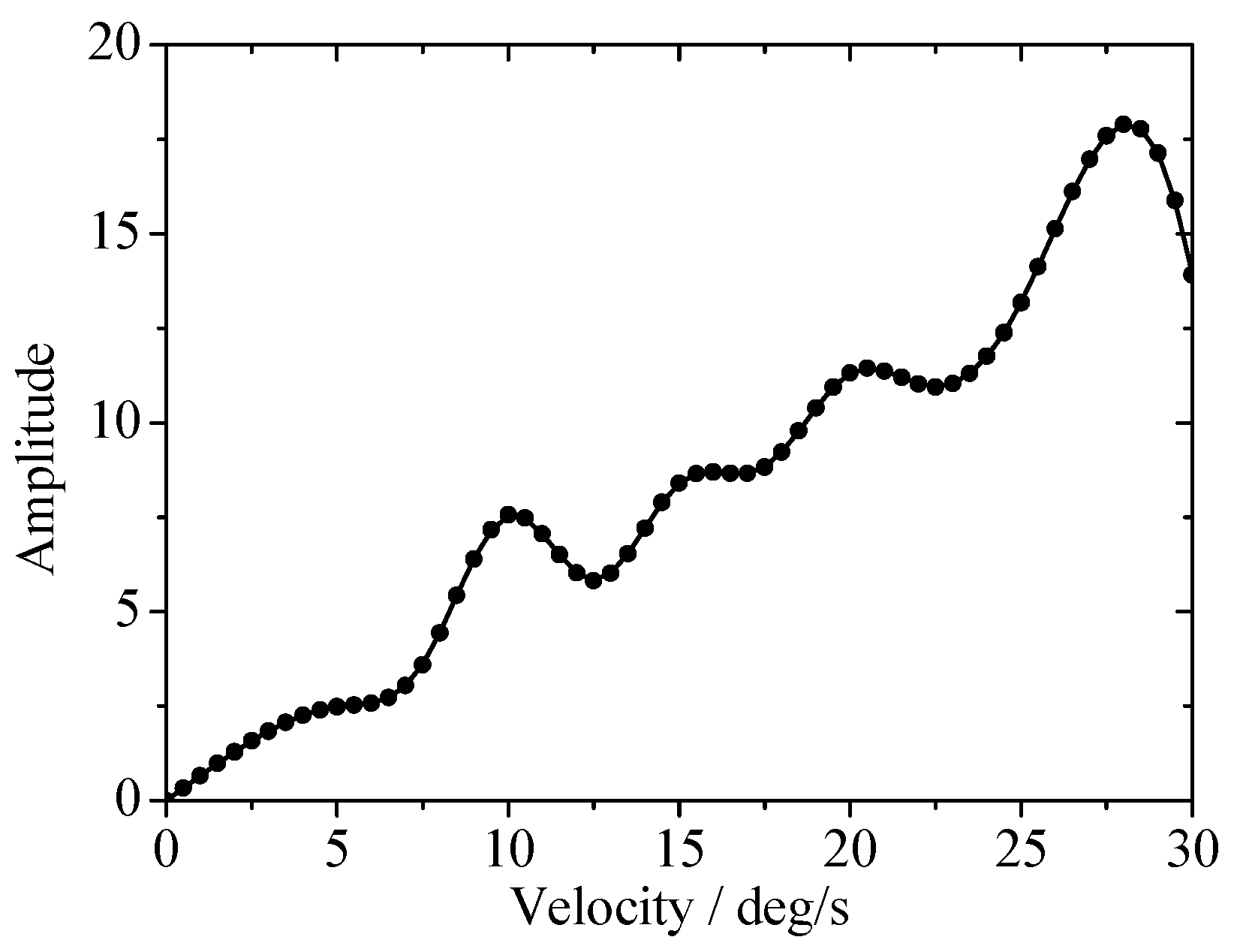
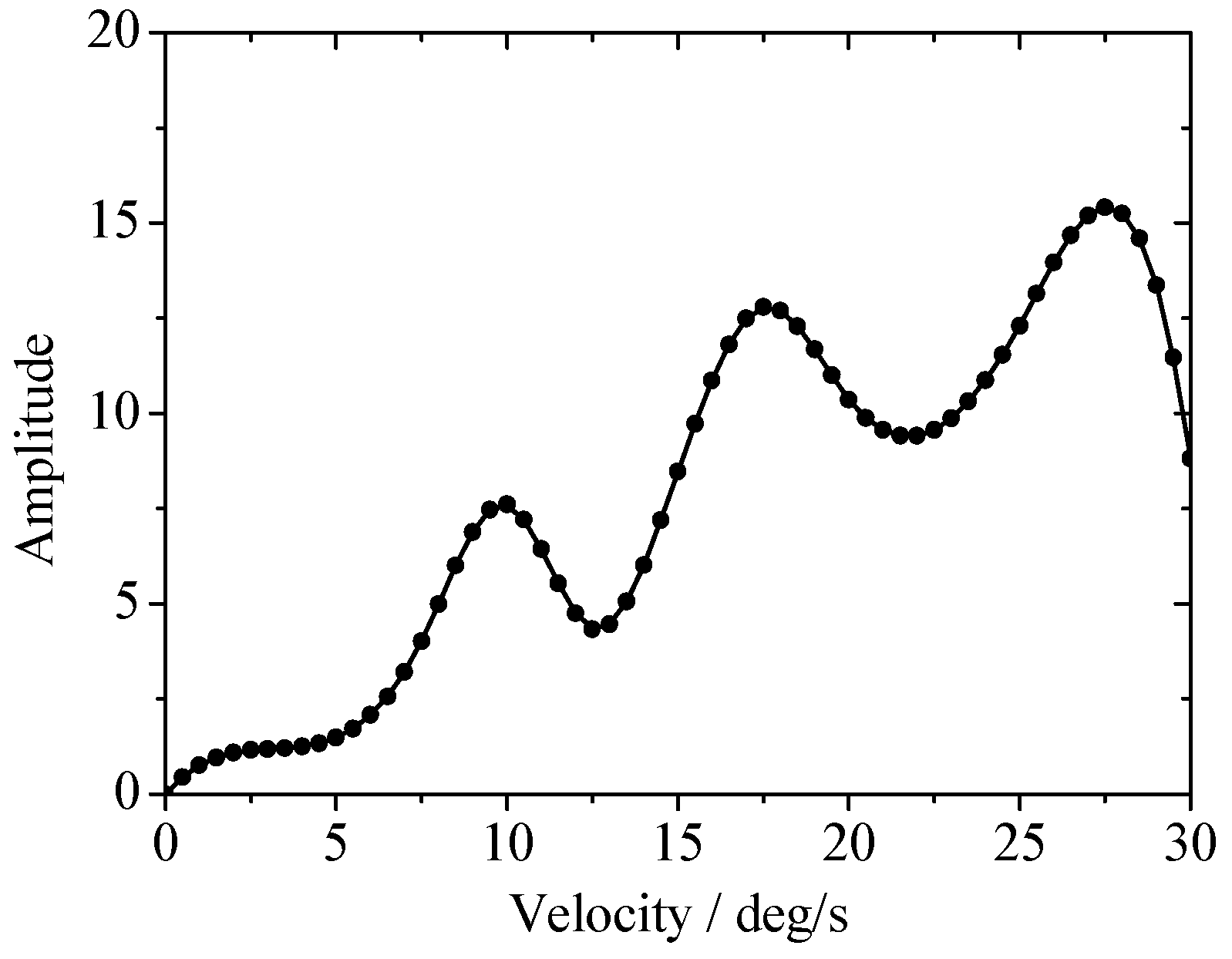
3.2. Effect of Velocity on Joint Vibration Characteristics
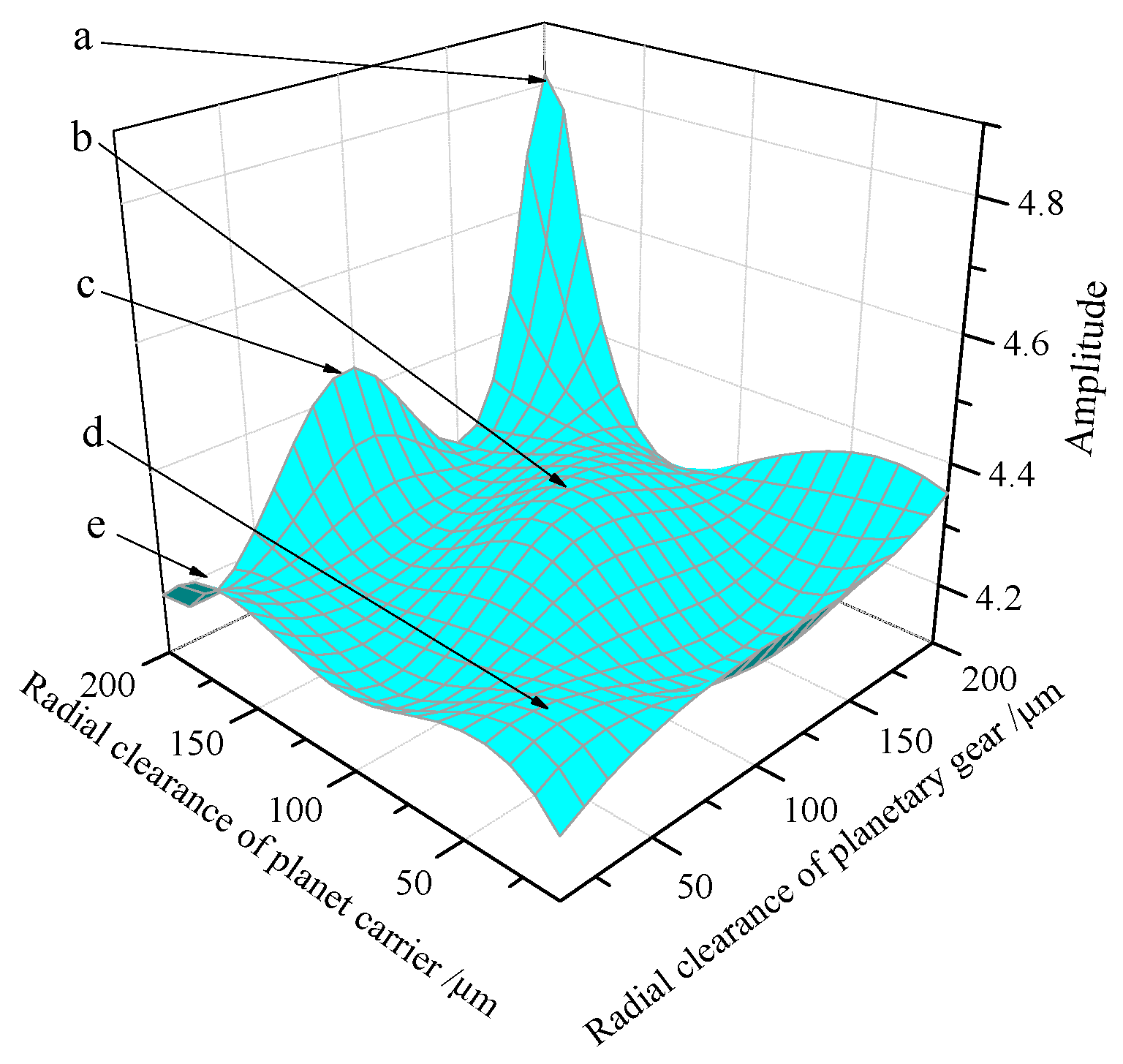
3.3. Influence of Clearance Size on Joint Vibration Characteristics
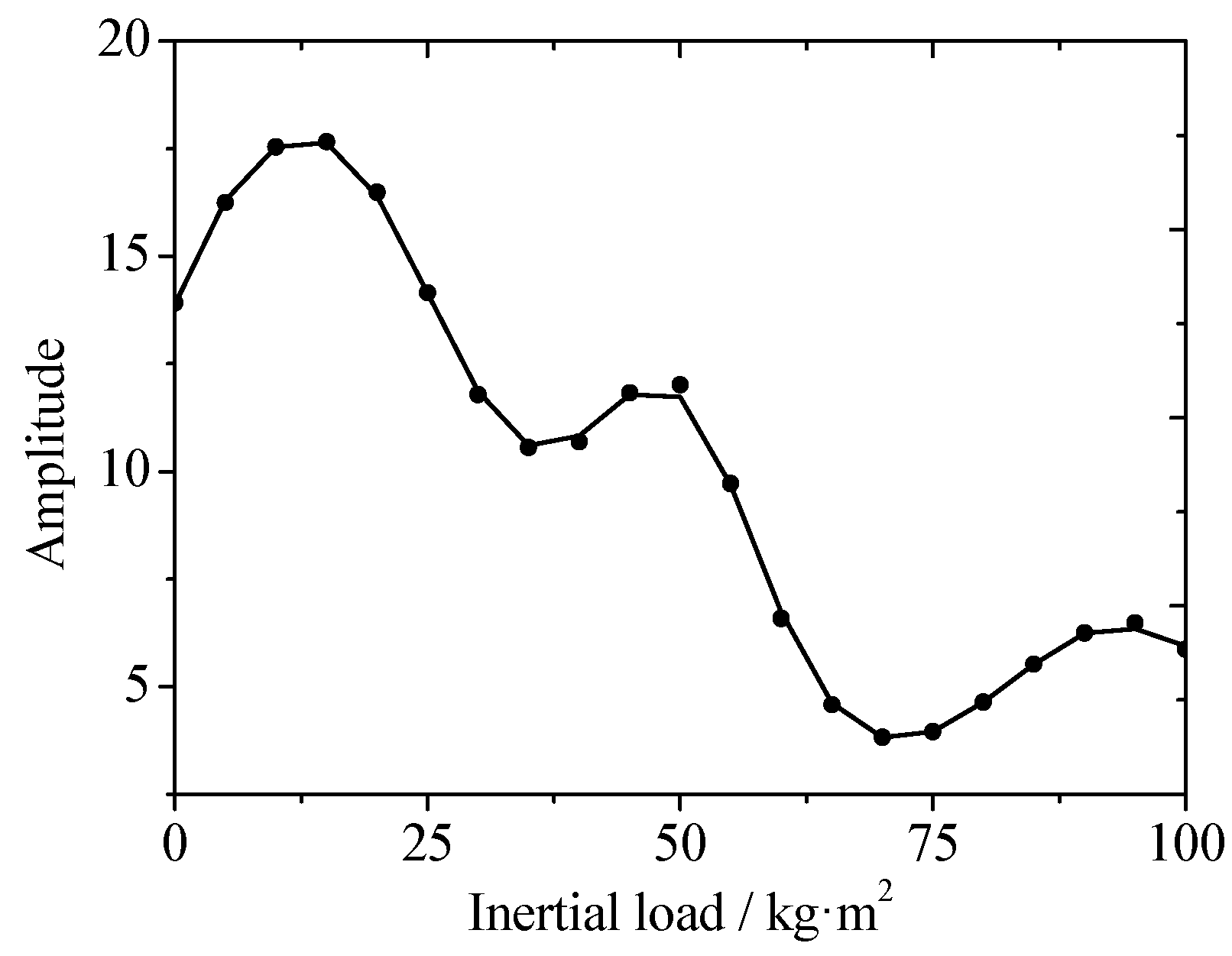
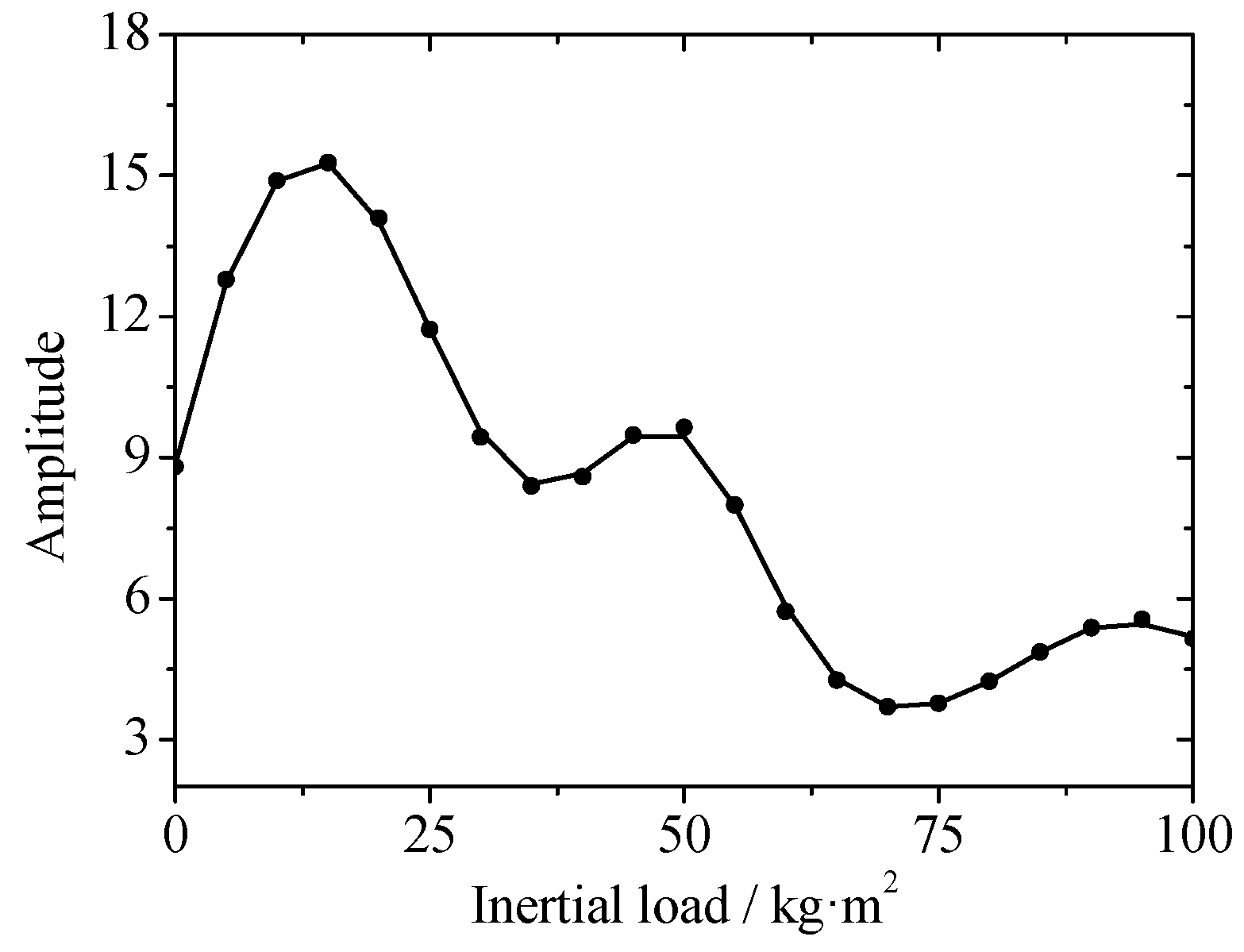
3.4. Influence of Load on Joint Vibration Characteristics
4. Conclusions
- At some specific velocities, resonance may occur between the vibration of the planet carrier and the planetary gear, and there is a coupling relation between the radial and torsional vibrations of the planetary gear itself;
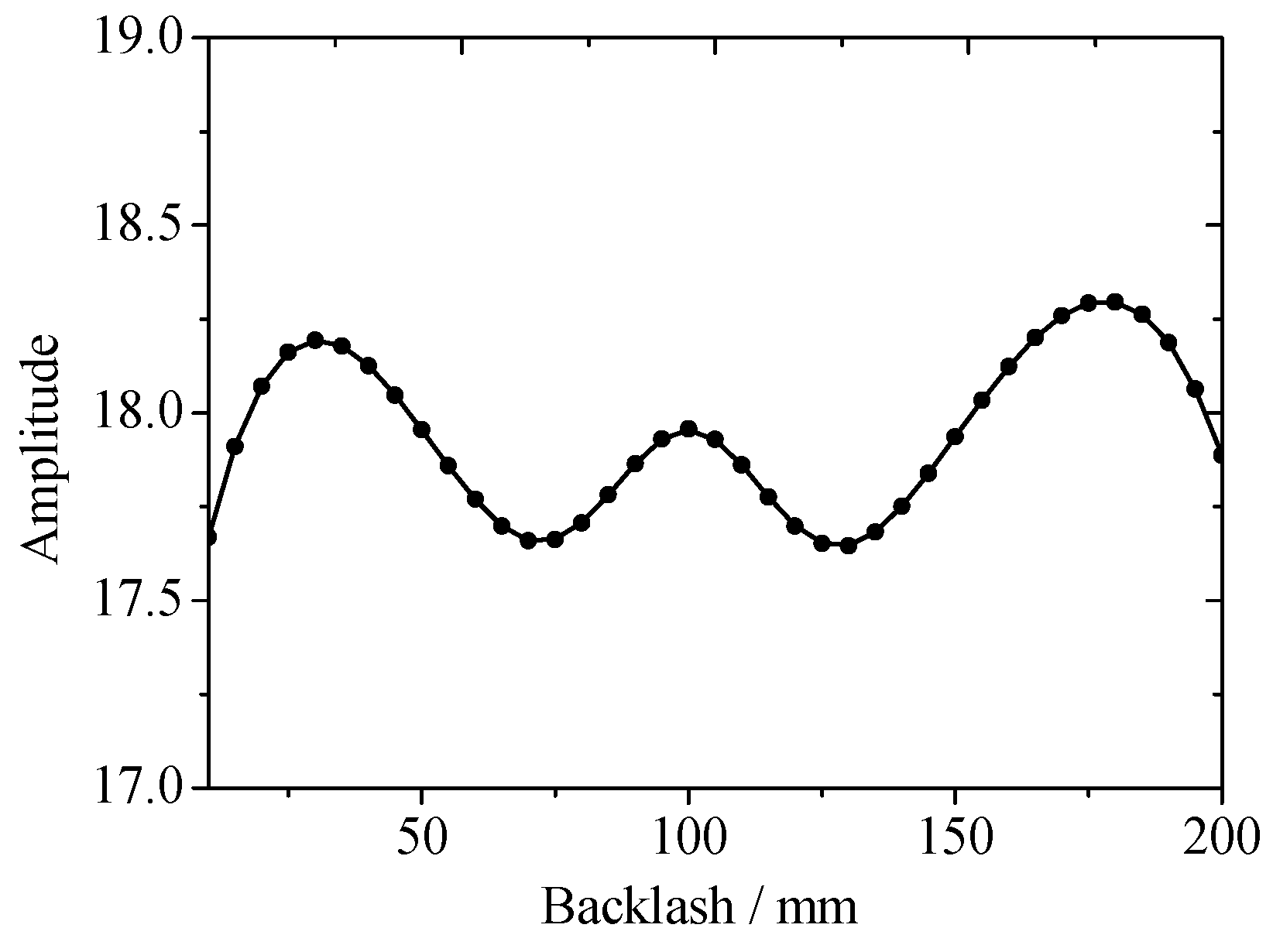
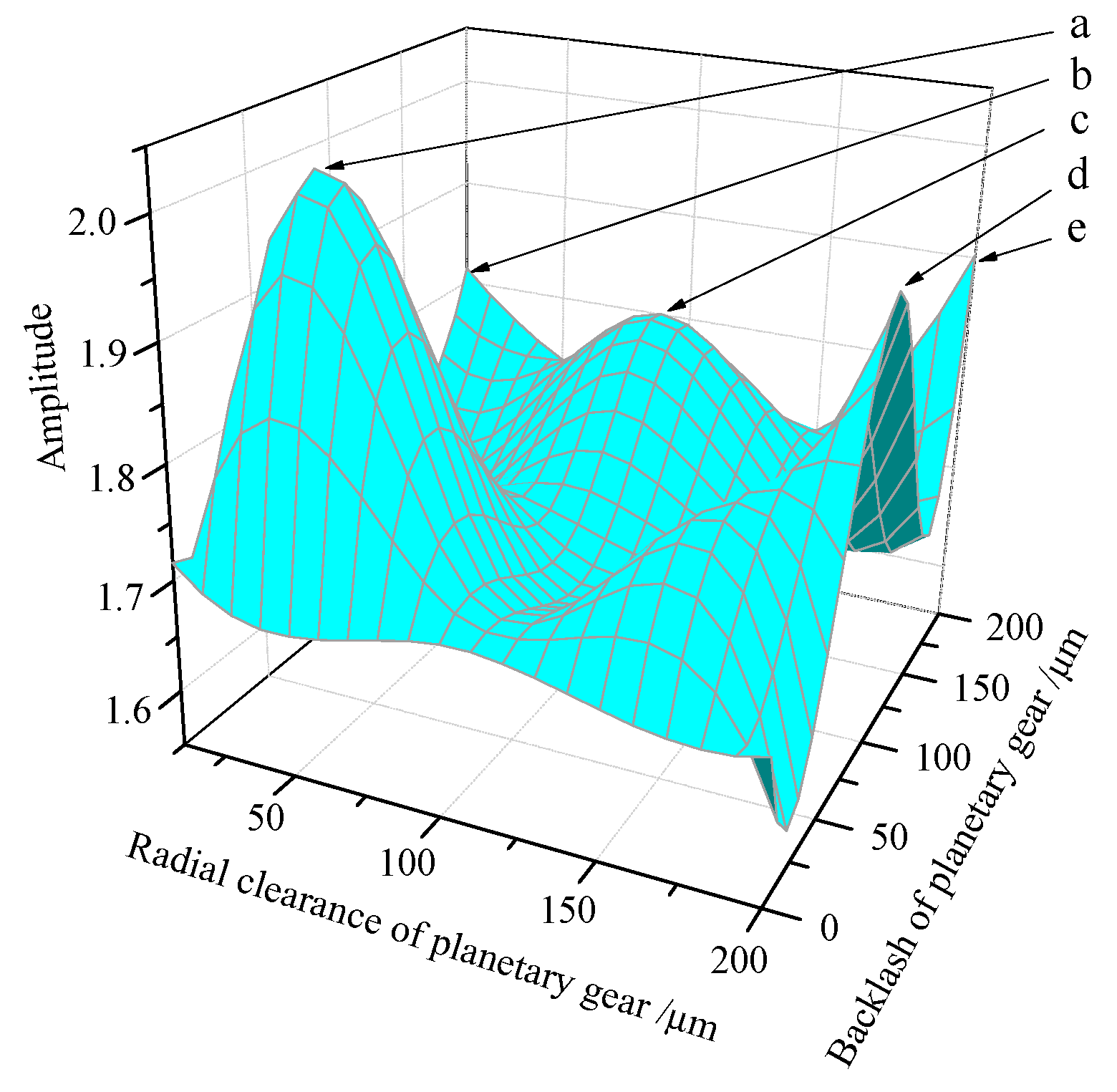
- The clearance may cause nonlinearities in the system dynamic and changes in the vibration amplitude. Vibration peaks occur when the radial vibration of the planet carrier and planetary gears have specific radial clearance sizes. The change of backlash size causes a torsional vibration peak between the planet carrier and planetary gear. The radial and torsional vibration of planetary gears also produce a vibration peak with certain radial clearance and backlash combinations;
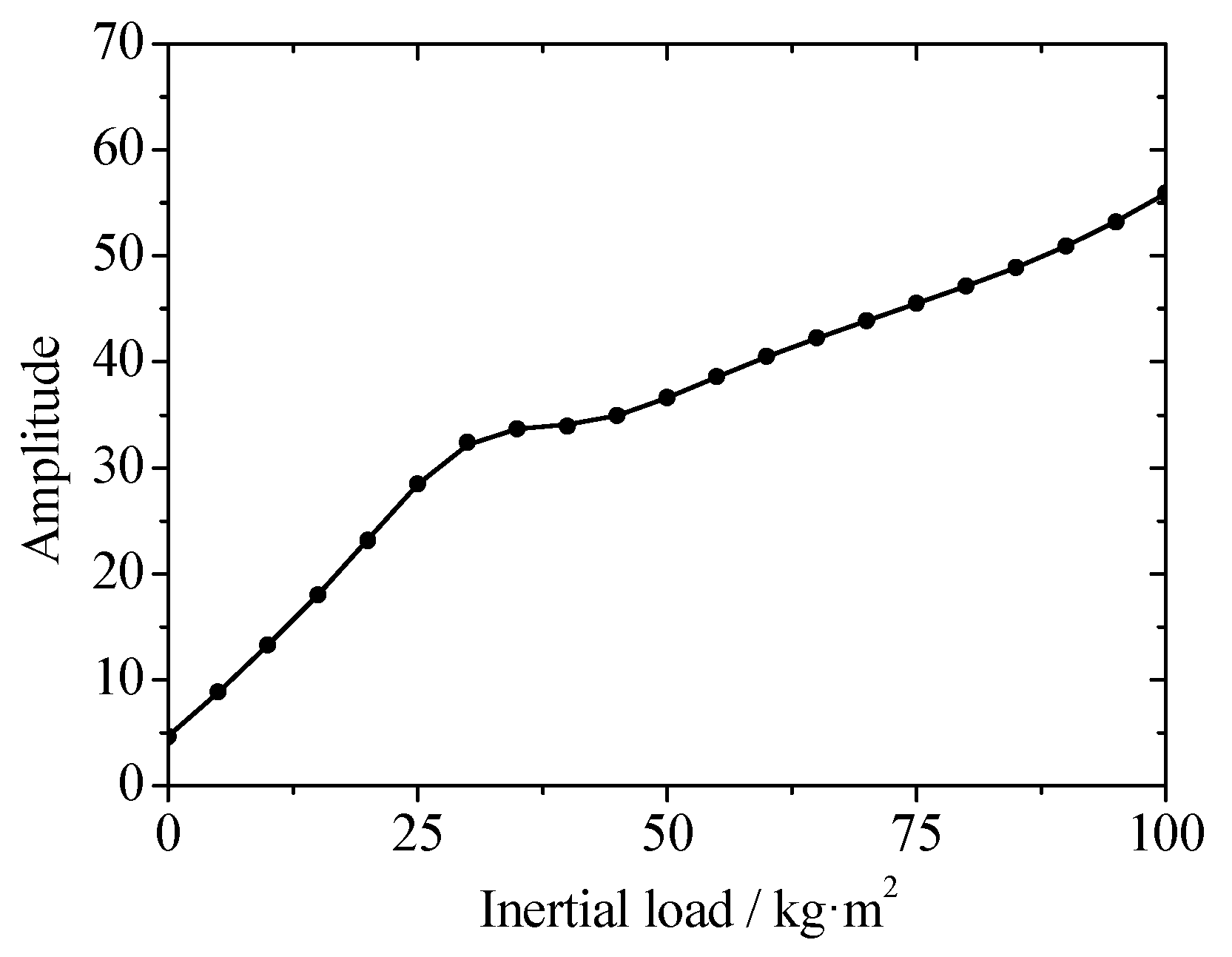
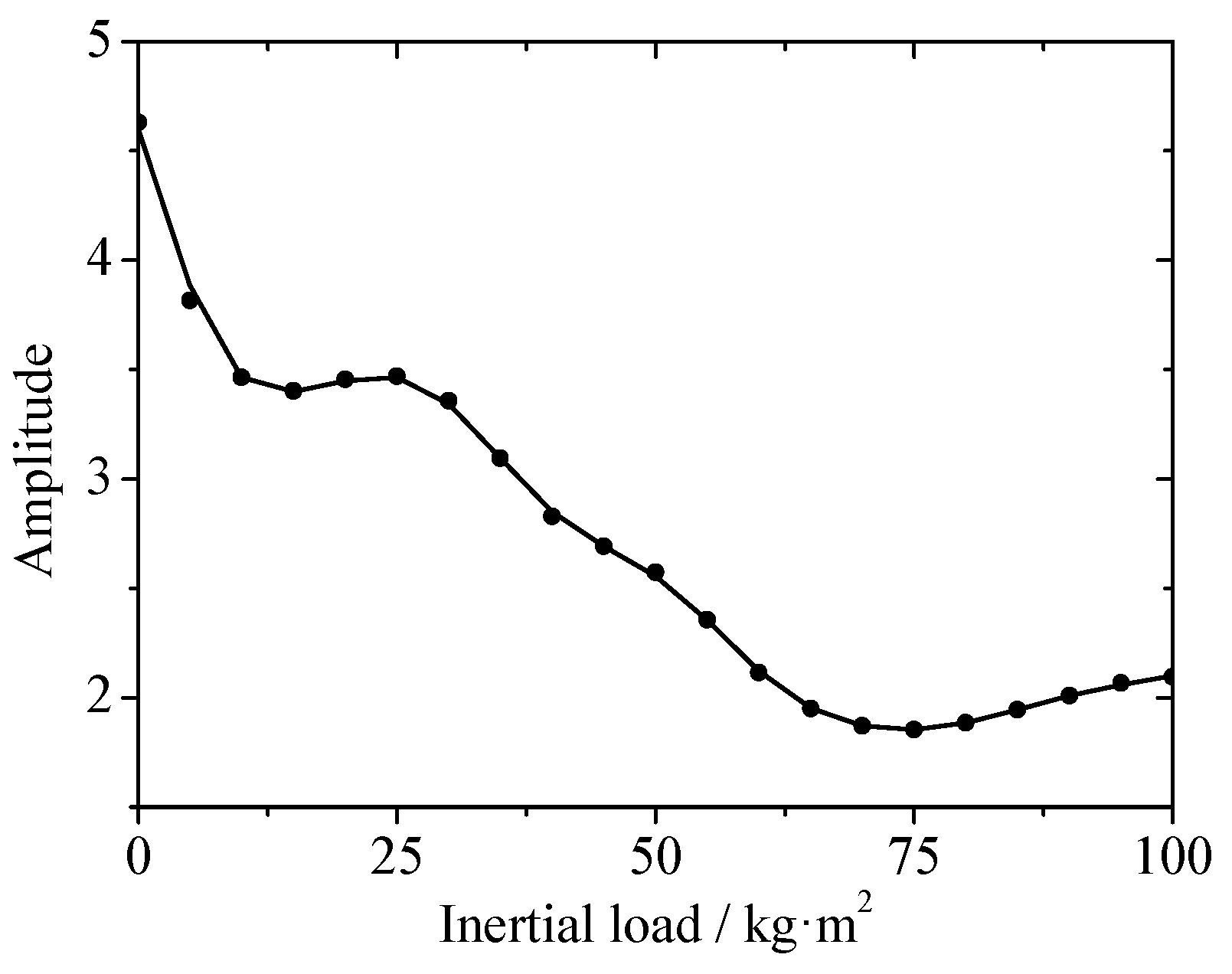
- Due to the special structure of planetary gears, the radial vibration amplitude of the output will increase when the load is heavy, but the amplitude of torsional vibration will decrease. Therefore, when the inertia load is heavy, the system’s rotation accuracy and stability are good, but when in empty-load or light-load states, the operating strategies also need to be adjusted to ensure operational reliability.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, Z.; Shao, Y. Dynamic simulation of planetary gear with tooth root crack in ring gear. Eng. Fail. Anal. 2013, 31, 8–18. [Google Scholar] [CrossRef]
- Pan, B.; Yu, D.; Sun, J. Research on dynamic modeling and analysis of joint in large space manipulator. J. Asrton. 2010, 31, 2448–2455. [Google Scholar] [CrossRef]
- Parenti-Castelli, V.; Venanzi, S. Clearance influence analysis on mechanisms. Mech. Mach. Theory 2005, 40, 1316–1329. [Google Scholar] [CrossRef]
- Bai, Z.; Zhao, Y.; Wang, X. Wear analysis of revolute joints with clearance in multibody systems. Sci. China Phys. Mech. Astron. 2013, 56, 1581–1590. [Google Scholar] [CrossRef]
- Megahed, S.M.; Haroun, A.F. Analysis of the dynamic behavioral performance of mechanical systems with multi-clearance joints. J. Comput. Nonlinear Dyn. 2012, 7, 354–360. [Google Scholar] [CrossRef]
- Zhang, H.; Tian, J.; Zhou, J.; Zhao, Y.; You, B. Dynamic and experimental investigation of gear-rotor system with multiple clearances coupled. Chin. J. Mech. Eng. 2017, 53, 29–37. [Google Scholar] [CrossRef]
- Chaker, A.; Mlika, A.; Laribi, M.A.; Romdhane, L.; Zeghloul, S. Clearance and manufacturing errors’ effects on the accuracy of the 3-RCC spherical parallel manipulator. Eur. J. Mech. A-Solids 2013, 37, 86–95. [Google Scholar] [CrossRef]
- Kahraman, A. Load sharing characteristics of planetary transmission. Mech. Mach. Theory 1994, 29, 1151–1165. [Google Scholar] [CrossRef]
- Yuksel, C.; Kahraman, A. Dynamic tooth loads of planetary gear sets having tooth profile wear. Mech. Mach. Theory 2004, 39, 695–715. [Google Scholar] [CrossRef]
- Al-Shyyab, A.; Kahraman, A. Non-linear dynamic analysis of a multi-mesh gear train using multi-term harmonic balance method: Sub-harmonic motions. J. Sound Vib. 2005, 284, 151–172. [Google Scholar] [CrossRef]
- Al-Shyyab, A.; Kahraman, A. Non-linear dynamic model for planetary gear sets. Proc. Inst. Mech. Eng. K-J. Multi-Body Dyn. 2007, 221, 567–576. [Google Scholar] [CrossRef]
- Ligata, H.; Kahraman, A.; Singh, A. An experimental study of the influence of manufacturing errors on the planetary gear stresses and planetary load sharing. J. Mech. Des. 2008, 130, 1–9. [Google Scholar] [CrossRef]
- Inalpolat, M.; Kahraman, A. A dynamic model to predict modulation sidebands of a planetary gear set having manufacturing errors. J. Sound Vib. 2010, 329, 371–393. [Google Scholar] [CrossRef]
- Hotait, M.A.; Kahraman, A. Experiments on the relationship between the dynamic transmission error and the dynamic stress factor of spur gear pairs. Mech. Mach. Theory 2013, 70, 116–128. [Google Scholar] [CrossRef]
- Li, S.; Kahraman, A. A tribo-dynamic model of a spur gear pair. J. Sound Vib. 2013, 332, 4963–4978. [Google Scholar] [CrossRef]
- Ambarisha, V.K.; Parker, R.G. Nonlinear dynamics of planetary gears using analytical and finite element models. J. Sound Vib. 2007, 302, 577–595. [Google Scholar] [CrossRef]
- Gill-Jeong, C.; Parker, R.G. Influence of bearing stiffness on the static properties of a planetary gear system with manufacturing errors. KSME Int. J. 2004, 18, 1978–1988. [Google Scholar] [CrossRef]
- Canchi, S.V.; Parker, R.G. Effect of ring-planet mesh phasing and contact ratio on the parametric instabilities of a planetary gear ring. J. Mech. Des. 2007, 130, 014501. [Google Scholar] [CrossRef]
- Liu, G.; Parker, R.G. Nonlinear dynamics of idler gear systems. Nonlinear Dyn. 2008, 53, 345–367. [Google Scholar] [CrossRef]
- Guo, Y.; Parker, R.G. Dynamic analysis of planetary gears with bearing clearance. J. Comput. Nonlinear Dyn. 2012, 7, 041002. [Google Scholar] [CrossRef]
- Ericson, T.M.; Parker, R.G. Experimental measurement of the effects of torque on the dynamic behavior and system parameters of planetary gears. Mech. Mach. Theory 2014, 74, 370–389. [Google Scholar] [CrossRef]
- Cooley, C.G.; Liu, C.; Dai, X.; Parker, R.G. Gear tooth mesh stiffness: A comparison of calculation approaches. Mech. Mach. Theory 2016, 105, 540–553. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. Control of nonlinear vibrations using the adjoint method. Meccanica 2017, 52, 2503–2526. [Google Scholar] [CrossRef]
- Pappalardo, C.M.; Guida, D. Adjoint-based optimization procedure for active vibration control of nonlinear mechanical systems. J. Dyn. Syst. Meas. Control 2017, 139, 081010. [Google Scholar] [CrossRef]
- Ouyang, H.; Richiedei, D.; Trevisani, A.; Zanardo, G. Discrete mass and stiffness modifications for the inverse eigenstructure assignment in vibrating systems: Theory and experimental validation. Int. J. Mech. Sci. 2012, 64, 211–220. [Google Scholar] [CrossRef]
- Palermo, A.; Mundo, D.; Hadjit, R.; Desmet, W. Multibody element for spur and helical gear meshing based on detailed three-dimensional contact calculations. Mech. Mach. Theory 2013, 62, 13–30. [Google Scholar] [CrossRef]
- Shweiki, S.; Palermo, A.; Mundo, D. A study on the dynamic behaviour of lightweight gears. Shock Vib. 2017, 2017, 1–12. [Google Scholar] [CrossRef]
- Vivet, M.; Mundo, D.; Tamarozzi, T.; Desmet, W. An analytical model for accurate and numerically efficient tooth contact analysis under load, applied to face-milled spiral bevel gears. Mech. Mach. Theory 2018, 130, 137–156. [Google Scholar] [CrossRef]
- Wei, J.; Zhang, A.; Qin, D.; Lim, T.; Shu, R.; Lin, X.; Meng, F. A coupling dynamics analysis method for a multistage planetary gear system. Mech. Mach. Theory 2017, 110, 27–49. [Google Scholar] [CrossRef]
- Yang, T.; Yan, S.; Han, Z. Nonlinear model of space manipulator joint considering time-variant stiffness and backlash. J. Sound Vib. 2015, 341, 246–259. [Google Scholar] [CrossRef]
- Yang, T.; Yan, S.; Wei, M.; Han, Z. Joint dynamic analysis of space manipulator with planetary gear train transmission. Robotica 2016, 34, 1042–1058. [Google Scholar] [CrossRef]
- Marques, F.; Isaac, F.; Dourado, N.; Flores, P. An enhanced formulation to model spatial revolute joints with radial and axial clearances. Mech. Mach. Theory 2017, 116, 123–144. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Sun | Planet | Ring |
|---|---|---|---|
| Number of teeth | 34 | 18 | 70 |
| Module (mm) | 1.5 | 1.5 | 1.5 |
| Pressure angle (deg) | 21.3 | 21.3 | 21.3 |
| Circular tooth thickness (mm) | 1.895 | 2.585 | 1.844 |
| Face width (mm) | 30 | 30 | 30 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Qi, C.; Fan, J.; Dai, S.; You, B. Vibration Characteristics Analysis of Planetary Gears with a Multi-Clearance Coupling in Space Mechanism. Energies 2018, 11, 2687. https://doi.org/10.3390/en11102687
Zhang H, Qi C, Fan J, Dai S, You B. Vibration Characteristics Analysis of Planetary Gears with a Multi-Clearance Coupling in Space Mechanism. Energies. 2018; 11(10):2687. https://doi.org/10.3390/en11102687
Chicago/Turabian StyleZhang, Huibo, Chaoqun Qi, Jizhuang Fan, Shijie Dai, and Bindi You. 2018. "Vibration Characteristics Analysis of Planetary Gears with a Multi-Clearance Coupling in Space Mechanism" Energies 11, no. 10: 2687. https://doi.org/10.3390/en11102687
APA StyleZhang, H., Qi, C., Fan, J., Dai, S., & You, B. (2018). Vibration Characteristics Analysis of Planetary Gears with a Multi-Clearance Coupling in Space Mechanism. Energies, 11(10), 2687. https://doi.org/10.3390/en11102687