Fixed Frequency Sliding Mode Control of Power Converters for Improved Dynamic Response in DC Micro-Grids


Abstract
:1. Introduction
- Improving the dynamic response of the closed loop system and increasing the robustness against unknown load demands in a DC micro-grid, using fixed frequency SMC.
- Designing a novel sliding manifold that results in stable operation of boost converter for wide range of gains, followed by a rigorous mathematical analysis for the stability condition.
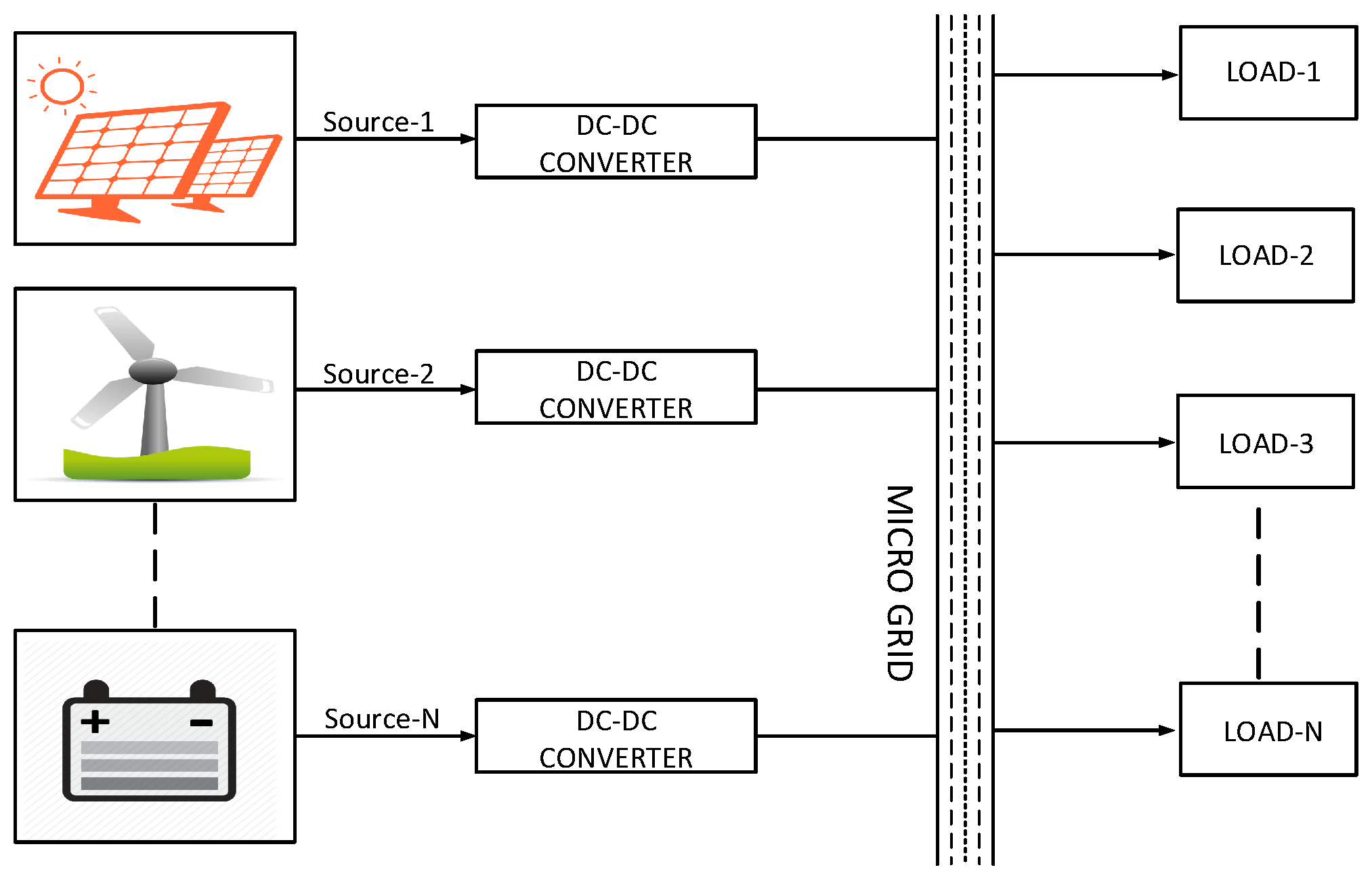
- Designing a special test rig with three sources, in order to validate the results in comparison with conventional PI controllers. Moreover, the technique is also tested for fault condition at one of the sources connected to the micro-grid.
2. Mathematical Model of the System
3. Controller Design
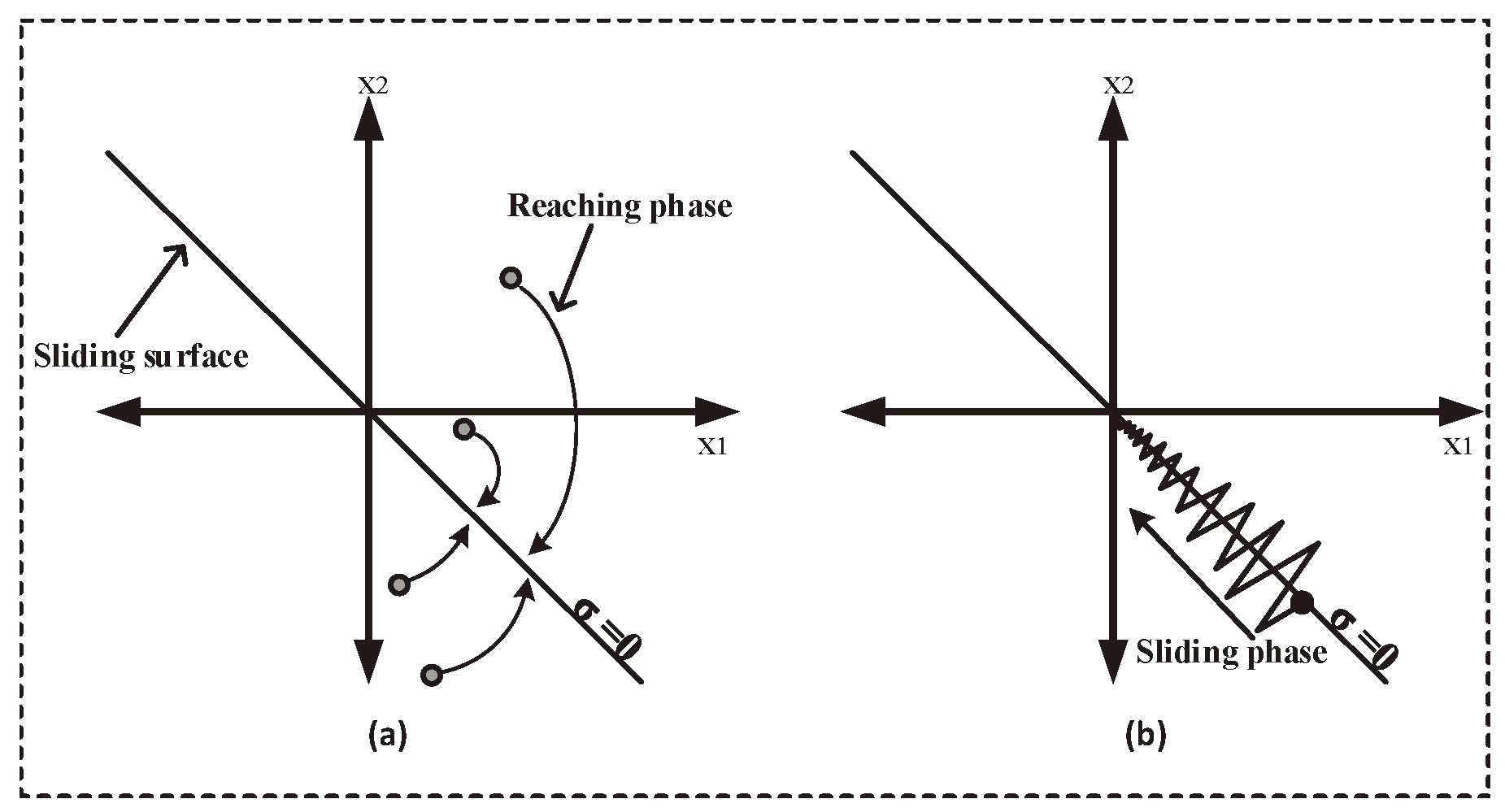
4. Existence of Sliding Mode Control
5. Sliding Surface and Parametrization of the Controller
6. Experimental Results and Discussion
6.1. Open Loop Response
6.2. Comparison with Current Mode Controller
6.2.1. Dynamic Response
6.2.2. Robustness of the Controller
6.3. Grid Testing for Fault Condition
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AC | Alternating Current |
| BJT | Bipolar Junction Transistor |
| DC | Direct Current |
| DGU | Distributed Generation Units |
| DSP | Digital Signal Processors |
| EMI | Electromagnetic Interference |
| FPGA | Field-Programmable Gate Array |
| LED | Light Emitting Diode |
| Li-ion | Lithium-ion |
| MOSFET | Metal Oxide Field-Effect Transistor |
| Ni-Cd | Nickel-Cadmium |
| PID | Proportional Integral Derivative |
| PI | Proportional Integral |
| PWM | Pulse Width Modulation |
| PV | Photo-Voltaic |
| RER | Renewable Energy Resources |
| SMC | Sliding Mode Control |
| C | Capacitance |
| Attenuation Constant | |
| Bandwidth of the Converter | |
| u | Control Input |
| Control Signal | |
| Damping Ratio | |
| Design Constants | |
| Desired Output Voltage | |
| d | Duty Ratio |
| Equivalent Control | |
| Error Signal | |
| Inductor Current | |
| L | Inductor of coil |
| Input Voltage | |
| Load Resistor | |
| Output Voltage | |
| Peak Amplitude of Modulating Ramp | |
| Reference Current | |
| Reference Voltage | |
| Sliding Manifold |
References
- Díaz, N.L.; Luna, A.C.; Vasquez, J.C.; Guerrero, J.M. Centralized control architecture for coordination of distributed renewable generation and energy storage in islanded ac microgrids. IEEE Trans. Power Electron. 2017, 32, 5202–5213. [Google Scholar] [CrossRef] [Green Version]
- Faria, P.; Spínola, J.; Vale, Z. Distributed Energy Resources Scheduling and Aggregation in the Context of Demand Response Programs. Energies 2018, 11, 1987. [Google Scholar] [CrossRef]
- Dörfler, F.; Simpson-Porco, J.W.; Bullo, F. Breaking the Hierarchy: Distributed Control and Economic Optimality in Microgrids. IEEE Trans. Control Netw. Syst. 2016, 3, 241–253. [Google Scholar] [CrossRef]
- Jin, M.; Feng, W.; Marnay, C.; Spanos, C. Microgrid to enable optimal distributed energy retail and end-user demand response. Appl. Energy 2018, 210, 1321–1335. [Google Scholar] [CrossRef] [Green Version]
- Antunez, P.D.; Bishop, D.M.; Luo, Y.; Haight, R. Efficient kesterite solar cells with high open-circuit voltage for applications in powering distributed devices. Nat. Energy 2017, 2, 884. [Google Scholar] [CrossRef]
- Bhowmik, C.; Bhowmik, S.; Ray, A.; Pandey, K.M. Optimal green energy planning for sustainable development: A review. Renew. Sustain. Energy Rev. 2017, 71, 796–813. [Google Scholar] [CrossRef]
- Mohan, N.; Undeland, T.M. Power Electronics: Converters, Applications, and Design; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Ivanovic, Z.; Blanusa, B.; Knezic, M. Power loss model for efficiency improvement of boost converter. In Proceedings of the 2011 XXIII International Symposium on Information, Communication and Automation Technologies, Sarajevo, Bosnia and Herzegovina, 27–29 October 2011; pp. 1–6. [Google Scholar]
- Lotfi, H.; Khodaei, A. AC versus DC microgrid planning. IEEE Trans. Smart Grid 2017, 8, 296–304. [Google Scholar] [CrossRef]
- Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M.; Skrlec, D. Advanced LVDC Electrical Power Architectures and Microgrids: A step toward a new generation of power distribution networks. IEEE Electrif. Mag. 2014, 2, 54–65. [Google Scholar] [CrossRef]
- Wang, C.; Duan, J.; Fan, B.; Yang, Q.; Liu, W. Decentralized High-Performance Control of DC Microgrids. IEEE Trans. Smart Grid 2018. [Google Scholar] [CrossRef]
- Cairoli, P.; Dougal, R.A. Fault Detection and Isolation in Medium-Voltage DC Microgrids: Coordination between Supply Power Converters and Bus Contactors. IEEE Trans. Power Electron. 2018, 33, 4535–4546. [Google Scholar] [CrossRef]
- Saleh, M.; Esa, Y.; Mohamed, A. Communication Based Control for DC Microgrids. IEEE Trans. Smart Grid 2018. [Google Scholar] [CrossRef]
- Dehkordi, N.M.; Baghaee, H.R.; Sadati, N.; Guerrero, J.M. Distributed Noise-resilient Secondary Voltage and Frequency Control for Islanded Microgrids. IEEE Trans. Smart Grid 2018. [Google Scholar] [CrossRef]
- Mousavi, S.Y.M.; Jalilian, A.; Savaghebi, M.; Guerrero, J.M. Coordinated control of multifunctional inverters for voltage support and harmonic compensation in a grid-connected microgrid. Electr. Power Syst. Res. 2018, 155, 254–264. [Google Scholar] [CrossRef] [Green Version]
- Sun, K.; Zhang, L.; Xing, Y.; Guerrero, J.M. A Distributed Control Strategy Based on DC Bus Signaling for Modular Photovoltaic Generation Systems With Battery Energy Storage. IEEE Trans. Power Electron. 2011, 26, 3032–3045. [Google Scholar] [CrossRef] [Green Version]
- Schonbergerschonberger, J.; Duke, R.; Round, S.D. DC-Bus Signaling: A Distributed Control Strategy for a Hybrid Renewable Nanogrid. IEEE Trans. Ind. Electron. 2006, 53, 1453–1460. [Google Scholar] [CrossRef] [Green Version]
- Alizadeh, E.; Birjandi, A.M.; Hamzeh, M. Decentralised power sharing control strategy in LV microgrids under unbalanced load conditions. IET Gener. Transm. Distrib. 2017, 11, 1613–1623. [Google Scholar] [CrossRef]
- Cucuzzella, M.; Trip, S.; De Persis, C.; Cheng, X.; Ferrara, A.; van der Schaft, A. A robust consensus algorithm for current sharing and voltage regulation in dc microgrids. IEEE Trans. Control Syst. Technol. 2018. [Google Scholar] [CrossRef]
- Kakigano, H.; Miura, Y.; Ise, T.; Uchida, R. DC voltage control of the DC micro-grid for super high quality electric power distribution. IEEE Trans. Ind. Appl. 2007, 127, 890–897. [Google Scholar] [CrossRef]
- Han, R.; Meng, L.; Guerrero, J.M.; Vasquez, J.C. Distributed nonlinear control with event-triggered communication to achieve current-sharing and voltage regulation in DC microgrids. IEEE Trans. Power Electron. 2018, 33, 6416–6433. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical Control of Droop-Controlled AC and DC Microgrids 2014;A General Approach Toward Standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Wai, R.J.; Shih, L.C. Design of voltage tracking control for DC–DC boost converter via total sliding-mode technique. IEEE Trans. Ind. Electron. 2011, 58, 2502–2511. [Google Scholar] [CrossRef]
- Shirazi, M.; Zane, R.; Maksimovic, D. An autotuning digital controller for DC–DC power converters based on online frequency-response measurement. IEEE Trans. Power Electron. 2009, 24, 2578–2588. [Google Scholar] [CrossRef]
- Guo, L.; Hung, J.Y.; Nelms, R.M. Evaluation of DSP-Based PID and Fuzzy Controllers for DC 2013;DC Converters. IEEE Trans. Ind. Electron. 2009, 56, 2237–2248. [Google Scholar] [CrossRef]
- Lee, M.; Chen, D.; Huang, K.; Liu, C.W.; Tai, B. Modeling and Design for a Novel Adaptive Voltage Positioning (AVP) Scheme for Multiphase VRMs. IEEE Trans. Power Electron. 2008, 23, 1733–1742. [Google Scholar] [CrossRef]
- Onwuchekwa, C.N.; Kwasinski, A. Analysis of Boundary Control for Buck Converters With Instantaneous Constant-Power Loads. IEEE Trans. Power Electron. 2010, 25, 2018–2032. [Google Scholar] [CrossRef] [Green Version]
- Galvez, J.M.; Ordonez, M.; Luchino, F.; Quaicoe, J.E. Improvements in Boundary Control of Boost Converters Using the Natural Switching Surface. IEEE Trans. Power Electron. 2011, 26, 3367–3376. [Google Scholar] [CrossRef]
- Kirshenboim, O.; Peretz, M.M. Stability Analysis of Boundary and Hybrid Controllers for Indirect Energy Transfer Converters. IEEE Trans. Power Electron. 2016, 31, 3360–3371. [Google Scholar] [CrossRef]
- Linares-Flores, J.; Méndez, A.H.; García-Rodríguez, C.; Sira-Ramírez, H. Robust Nonlinear Adaptive Control of a Boost Converter via Algebraic Parameter Identification. IEEE Trans. Ind. Electron. 2014, 61, 4105–4114. [Google Scholar] [CrossRef]
- Cavanini, L.; Cimini, G.; Ippoliti, G.; Bemporad, A. Model predictive control for pre-compensated voltage mode controlled DC–DC converters. IET Control Theory Appl. 2017, 11, 2514–2520. [Google Scholar] [CrossRef]
- Kim, S.K.; Park, C.R.; Kim, J.S.; Lee, Y.I. A stabilizing model predictive controller for voltage regulation of a DC/DC boost converter. IEEE Trans. Control Syst. Technol. 2014, 22, 2016–2023. [Google Scholar] [CrossRef]
- Karamanakos, P.; Geyer, T.; Manias, S. Direct voltage control of dc–dc boost converters using enumeration-based model predictive control. IEEE Trans. Power Electron. 2014, 29, 968–978. [Google Scholar] [CrossRef]
- Wang, Y.X.; Yu, D.H.; Kim, Y.B. Robust Time-Delay Control for the DC–DC Boost Converter. IEEE Trans. Ind. Electron. 2014, 61, 4829–4837. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding mode control design principles and applications to electric drives. IEEE Trans. Ind. Electron. 1993, 40, 23–36. [Google Scholar] [CrossRef] [Green Version]
- Calvente, J.; El Aroudi, A.; Giral, R.; Cid-Pastor, A.; Vidal-Idiarte, E.; Martínez-Salamero, L. Design of Current Programmed Switching Converters Using Sliding-Mode Control Theory. Energies 2018, 11, 2034. [Google Scholar] [CrossRef]
- Delghavi, M.B.; Yazdani, A. Sliding-Mode Control of AC Voltages and Currents of Dispatchable Distributed Energy Resources in Master-Slave-Organized Inverter-Based Microgrids. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Pilloni, A.; Pisano, A.; Usai, E. Robust Finite-Time Frequency and Voltage Restoration of Inverter-Based Microgrids via Sliding-Mode Cooperative Control. IEEE Trans. Ind. Electron. 2018, 65, 907–917. [Google Scholar] [CrossRef]
- Dou, C.; Zhang, B.; Yue, D.; Zhang, Z.; Xu, S.; Hayat, T.; Alsaedi, A. A Novel Hierarchical Control Strategy Combined with Sliding Mode Control and Consensus Control for Islanded Micro-grid. IET Renew. Power Gener. 2018, 12, 1012–1024. [Google Scholar] [CrossRef]
- Fu, Y.; Zhang, H.; Mi, Y.; Huang, L.; Li, Z.; Wang, J. Control strategy of DFIG in hybrid micro-grid using sliding mode frequency controller and observer. IET Gener. Transm. Distrib. 2018, 12, 2662–2669. [Google Scholar] [CrossRef]
- Shinde, U.K.; Kadwane, S.G.; Gawande, S.P.; Reddy, M.J.B.; Mohanta, D.K. Sliding Mode Control of Single-Phase Grid-Connected Quasi-Z-Source Inverter. IEEE Access 2017, 5, 10232–10240. [Google Scholar] [CrossRef]
- Zhu, Y.; Fei, J. Adaptive Global Fast Terminal Sliding Mode Control of Grid-connected Photovoltaic System Using Fuzzy Neural Network Approach. IEEE Access 2017, 5, 9476–9484. [Google Scholar] [CrossRef]
- Ghiasi, M.I.; Golkar, M.A.; Hajizadeh, A. Lyapunov Based-Distributed Fuzzy-Sliding Mode Control for Building Integrated-DC Microgrid With Plug-In Electric Vehicle. IEEE Access 2017, 5, 7746–7752. [Google Scholar] [CrossRef] [Green Version]
- Utkin, V. Sliding mode control of DC/DC converters. J. Frankl. Inst. 2013, 350, 2146–2165. [Google Scholar] [CrossRef] [Green Version]
- Teja, A.R.; Chakraborty, C.; Pal, B.C. Disturbance Rejection Analysis and FPGA based Implementation of a Second Order Sliding Mode Controller fed Induction Motor Drive. IEEE Trans. Energy Convers. 2018, 33, 1453–1462. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.; Dong, J.; Jiang, L. Robust sliding-mode control of wind energy conversion systems for optimal power extraction via nonlinear perturbation observers. Appl. Energy 2018, 210, 711–723. [Google Scholar] [CrossRef]
- Tan, S.C.; Lai, Y.M.; Cheung, M.K.H.; Tse, C.K. On the practical design of a sliding mode voltage controlled buck converter. IEEE Trans. Power Electron. 2005, 20, 425–437. [Google Scholar] [CrossRef] [Green Version]
- Pareschi, F.; Rovatti, R.; Setti, G. EMI Reduction via Spread Spectrum in DC/DC Converters: State of the Art, Optimization, and Tradeoffs. IEEE Access 2015, 3, 2857–2874. [Google Scholar] [CrossRef]
- Mohanty, P.R.; Panda, A.K. Fixed-Frequency Sliding-Mode Control Scheme Based on Current Control Manifold for Improved Dynamic Performance of Boost PFC Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 576–586. [Google Scholar] [CrossRef]
- He, Y.; Luo, F. Sliding-mode control for dc–dc converters with constant switching frequency. IEE Proc. Control Theory Appl. 2006, 153, 37–45. [Google Scholar] [CrossRef]
- Ye, J.; Malysz, P.; Emadi, A. A fixed-switching-frequency integral sliding mode current controller for switched reluctance motor drives. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 381–394. [Google Scholar]
- Abeywardana, D.B.W.; Hredzak, B.; Agelidis, V.G. A fixed-frequency sliding mode controller for a boost-inverter-based battery-supercapacitor hybrid energy storage system. IEEE Trans. Power Electron. 2017, 32, 668–680. [Google Scholar] [CrossRef]
- Gao, M.; Wang, D.; Li, Y.; Yuan, T. Fixed frequency pulse-width modulation based integrated sliding mode controller for phase-shifted full-bridge converters. IEEE Access 2018, 6, 2181–2192. [Google Scholar] [CrossRef]
- Chincholkar, S.H.; Chan, C.Y. Design of fixed-frequency pulsewidth-modulation-based sliding-mode controllers for the quadratic boost converter. IEEE Trans. Circuits Syst. II Express Briefs 2017, 64, 51–55. [Google Scholar] [CrossRef]
- Sira-Ramirez, H. Sliding-mode control on slow manifolds of DC-to-DC power converters. Int. J. Control 1988, 47, 1323–1340. [Google Scholar] [CrossRef]
- Shahir, F.M.; Babaei, E.; Farsadi, M. Extended Topology for Boost DC–DC Converter. IEEE Trans. Power Electron. 2018. [Google Scholar] [CrossRef]
- Alsmadi, Y.M.; Utkin, V.; Haj-ahmed, M.A.; Xu, L. Sliding mode control of power converters: DC/DC converters. Int. J. Control 2017, 1–22. [Google Scholar] [CrossRef]
- Kokotovic, P.V.; O’malley, R.; Sannuti, P. Singular perturbations and order reduction in control theory—An overview. Automatica 1976, 12, 123–132. [Google Scholar] [CrossRef]
- Kokotović, P.V. Applications of singular perturbation techniques to control problems. SIAM Rev. 1984, 26, 501–550. [Google Scholar] [CrossRef]
- Utkin, V.; Guldner, J.; Shi, J. Sliding Mode Control in Electro-Mechanical Systems; CRC Press: Boca Raton, FL, USA, 2009; Volume 34. [Google Scholar]
- Tan, S.C.; Lai, Y.; Tse, C.K. Indirect sliding mode control of power converters via double integral sliding surface. IEEE Trans. Power Electron. 2008, 23, 600. [Google Scholar]
- Sira-Ramirez, H.; Ilic, M. A geometric approach to the feedback control of switch mode DC-to-DC power supplies. IEEE Trans. Circuits Syst. 1988, 35, 1291–1298. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Input Voltage | 55 V |
| Output Voltage | 110 V |
| Inductance of Coil | 100 H |
| Output capacitance | 1000 F |
| Max. Output power | 2000 W |
| 12.1 | 24.0 |
| 14.5 | 24.0 |
| 16.0 | 24.0 |
| 18.1 | 24.0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yasin, A.R.; Ashraf, M.; Bhatti, A.I. Fixed Frequency Sliding Mode Control of Power Converters for Improved Dynamic Response in DC Micro-Grids. Energies 2018, 11, 2799. https://doi.org/10.3390/en11102799
Yasin AR, Ashraf M, Bhatti AI. Fixed Frequency Sliding Mode Control of Power Converters for Improved Dynamic Response in DC Micro-Grids. Energies. 2018; 11(10):2799. https://doi.org/10.3390/en11102799
Chicago/Turabian StyleYasin, Abdul Rehman, Muhammad Ashraf, and Aamer Iqbal Bhatti. 2018. "Fixed Frequency Sliding Mode Control of Power Converters for Improved Dynamic Response in DC Micro-Grids" Energies 11, no. 10: 2799. https://doi.org/10.3390/en11102799
APA StyleYasin, A. R., Ashraf, M., & Bhatti, A. I. (2018). Fixed Frequency Sliding Mode Control of Power Converters for Improved Dynamic Response in DC Micro-Grids. Energies, 11(10), 2799. https://doi.org/10.3390/en11102799