The Role of Charging Infrastructure in Electric Vehicle Implementation within Smart Grids



Abstract
:1. Introduction
1.1. Literature Review of Smart Grid-Related Studies
1.2. Integration of Electric Vehicles into the Smart Grid
- Fixed loads (uncontrolled charging strategy)
- Flexible loads (controlled or smart charging strategy)
- Mobile energy storage systems (vehicle-to-grid)
1.3. Contributions of this Work
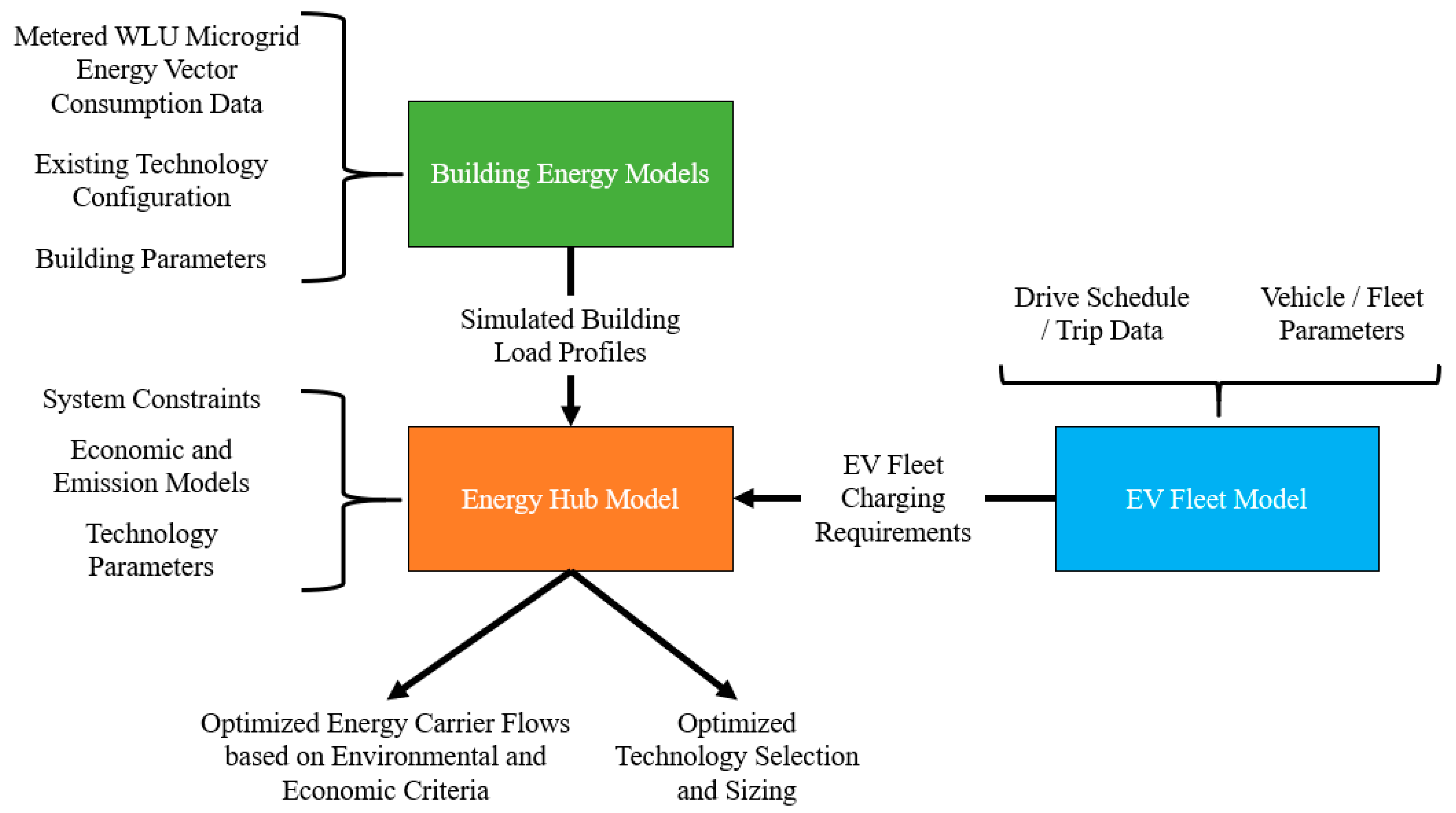
2. Methodology
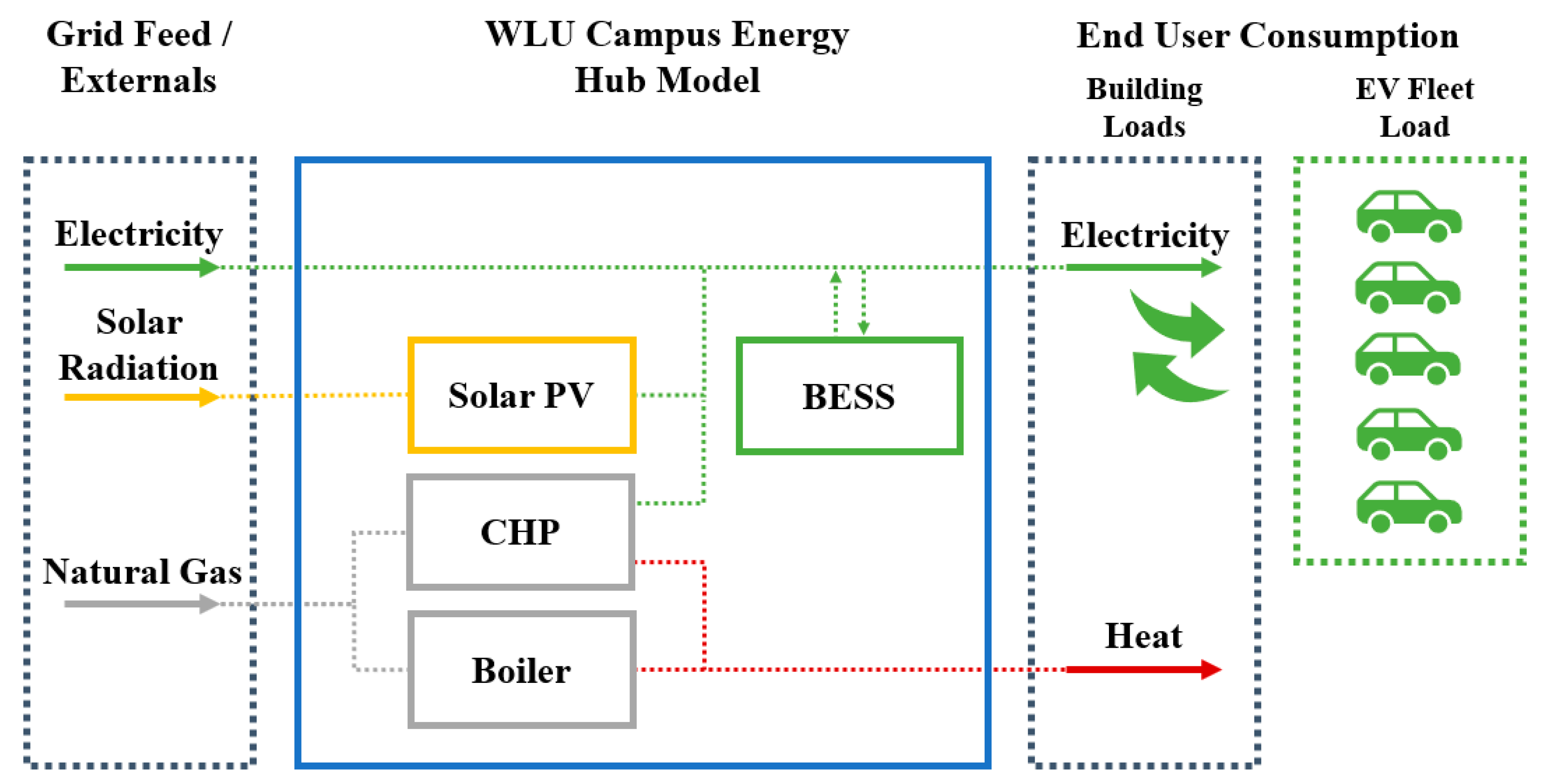
2.1. Energy Hub Model
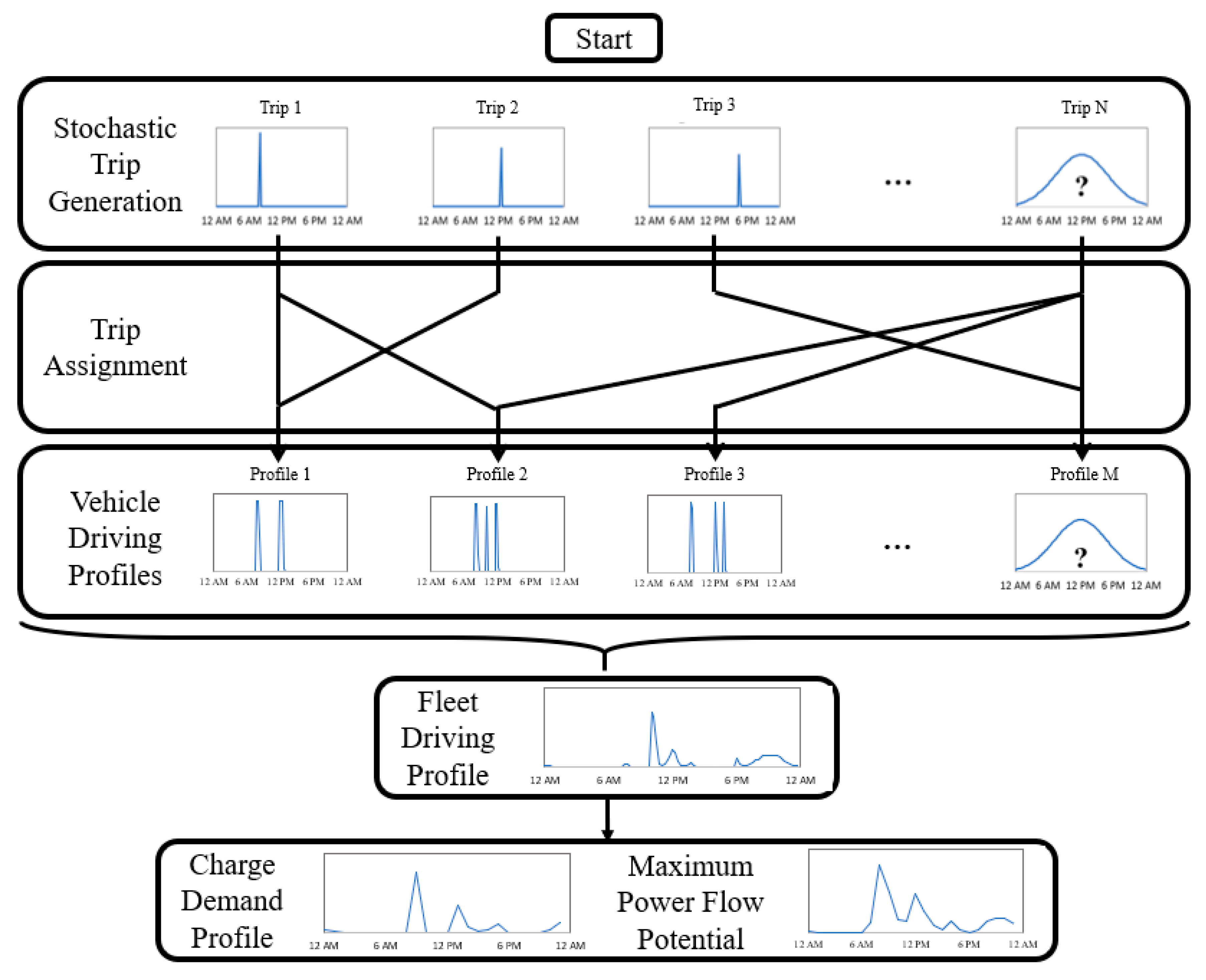
2.2. Monte Carlo Simulation of Electric Vehicle Fleet Charging Demand
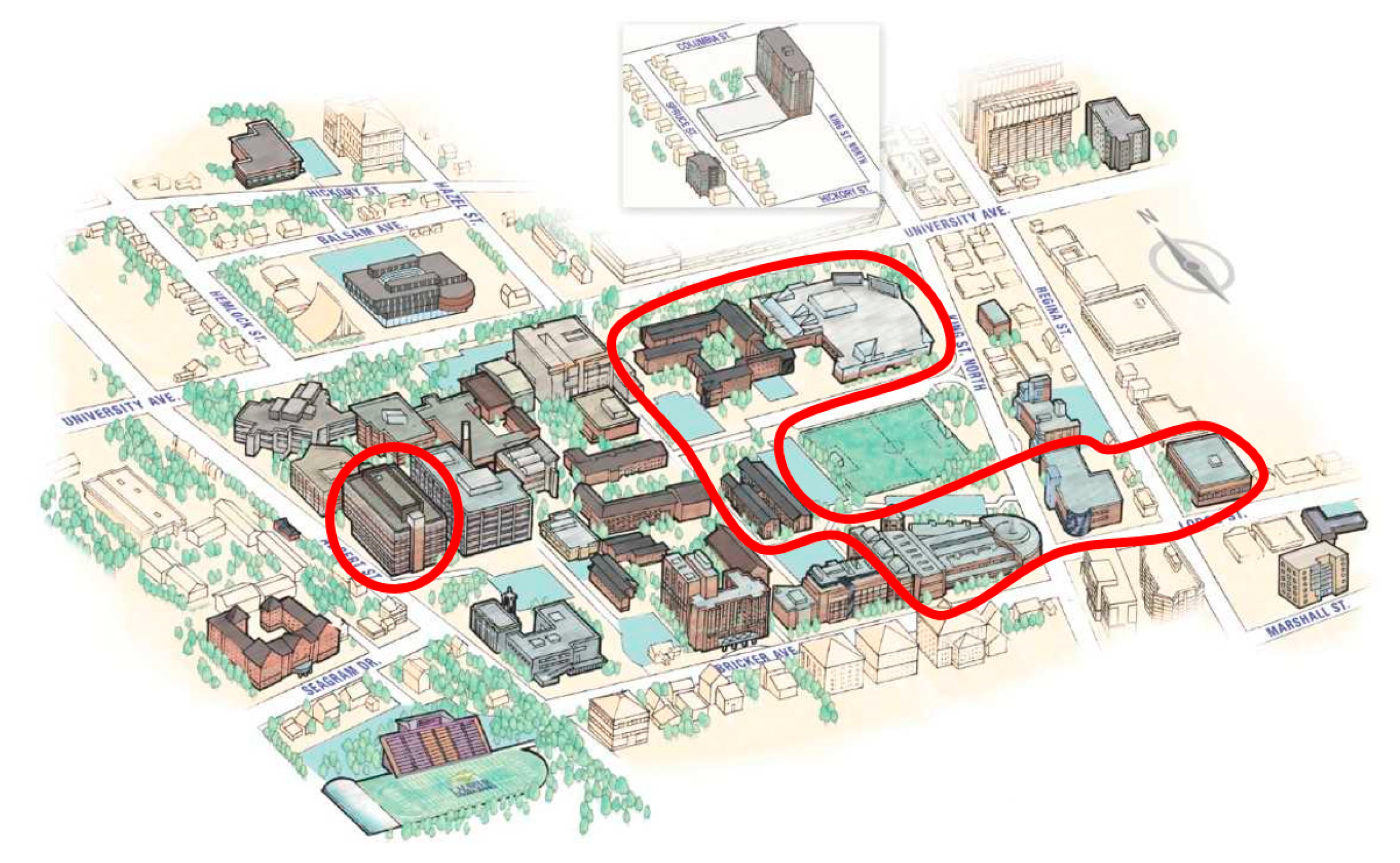
2.3. Case Study—Wilfrid Laurier University Campus Microgrid
2.4. Simulation Scenarios
3. Results and Analysis
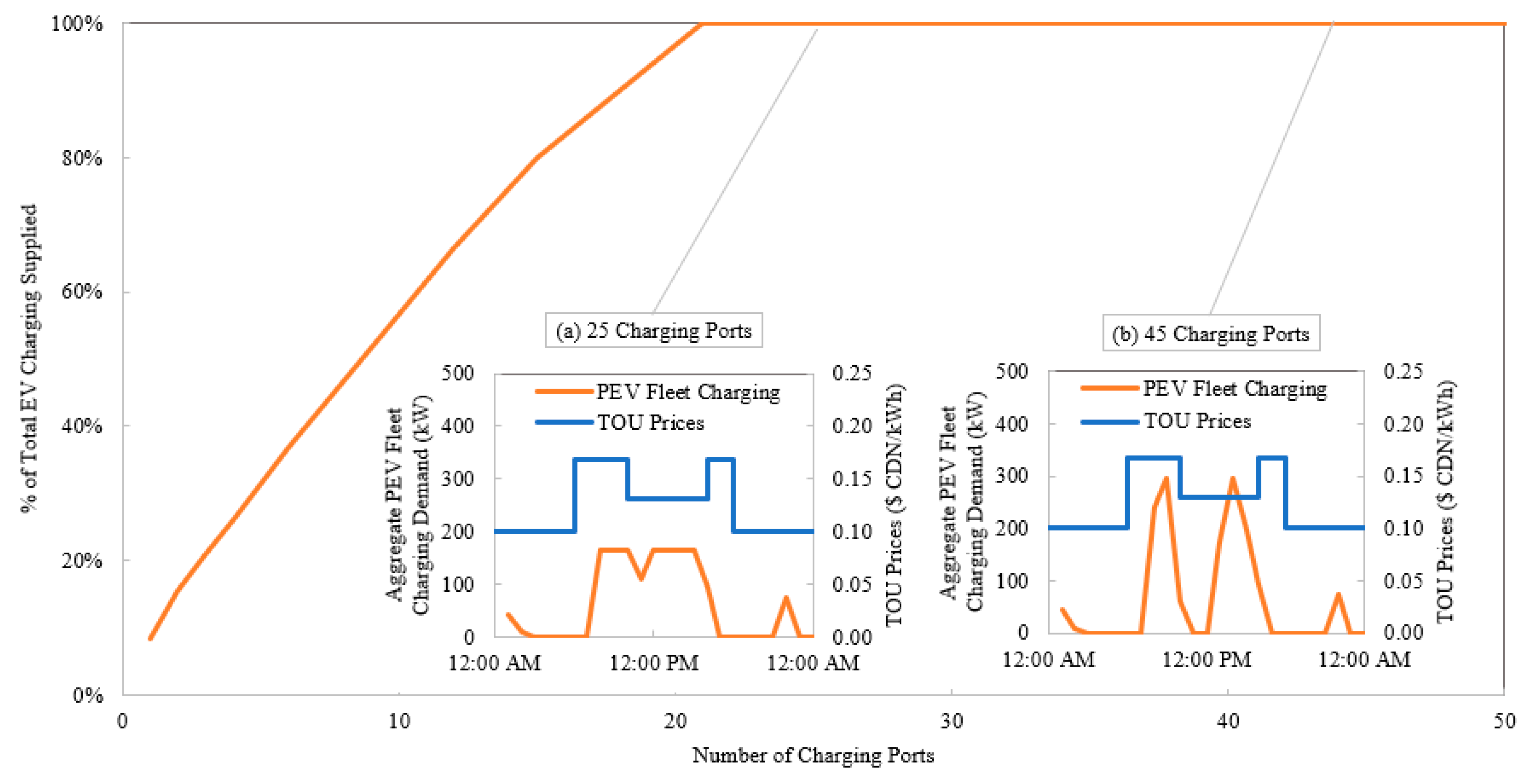
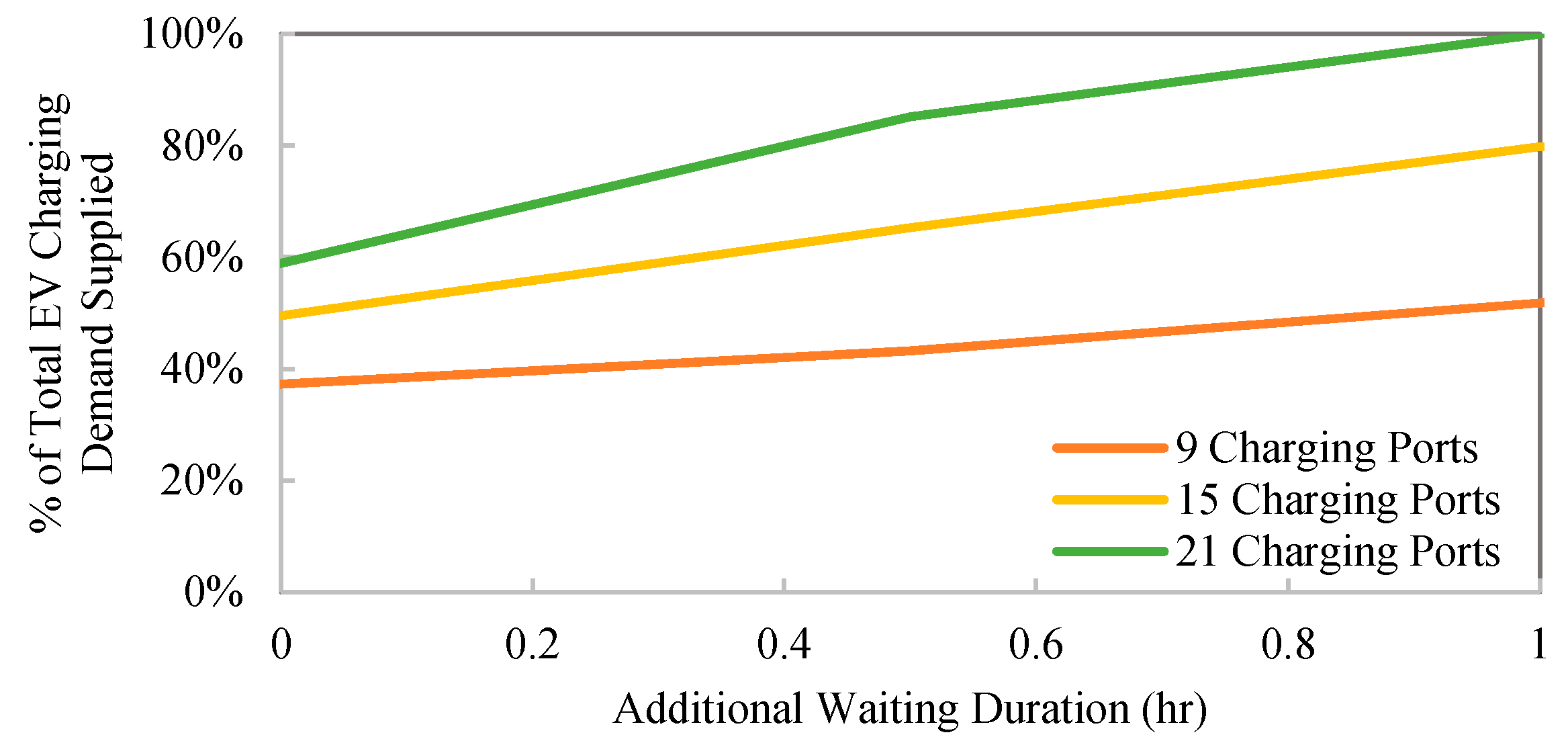
3.1. Effect of Charging Infrastructure Limitations on EV Adoption and Feasibility of EV Operational Modes
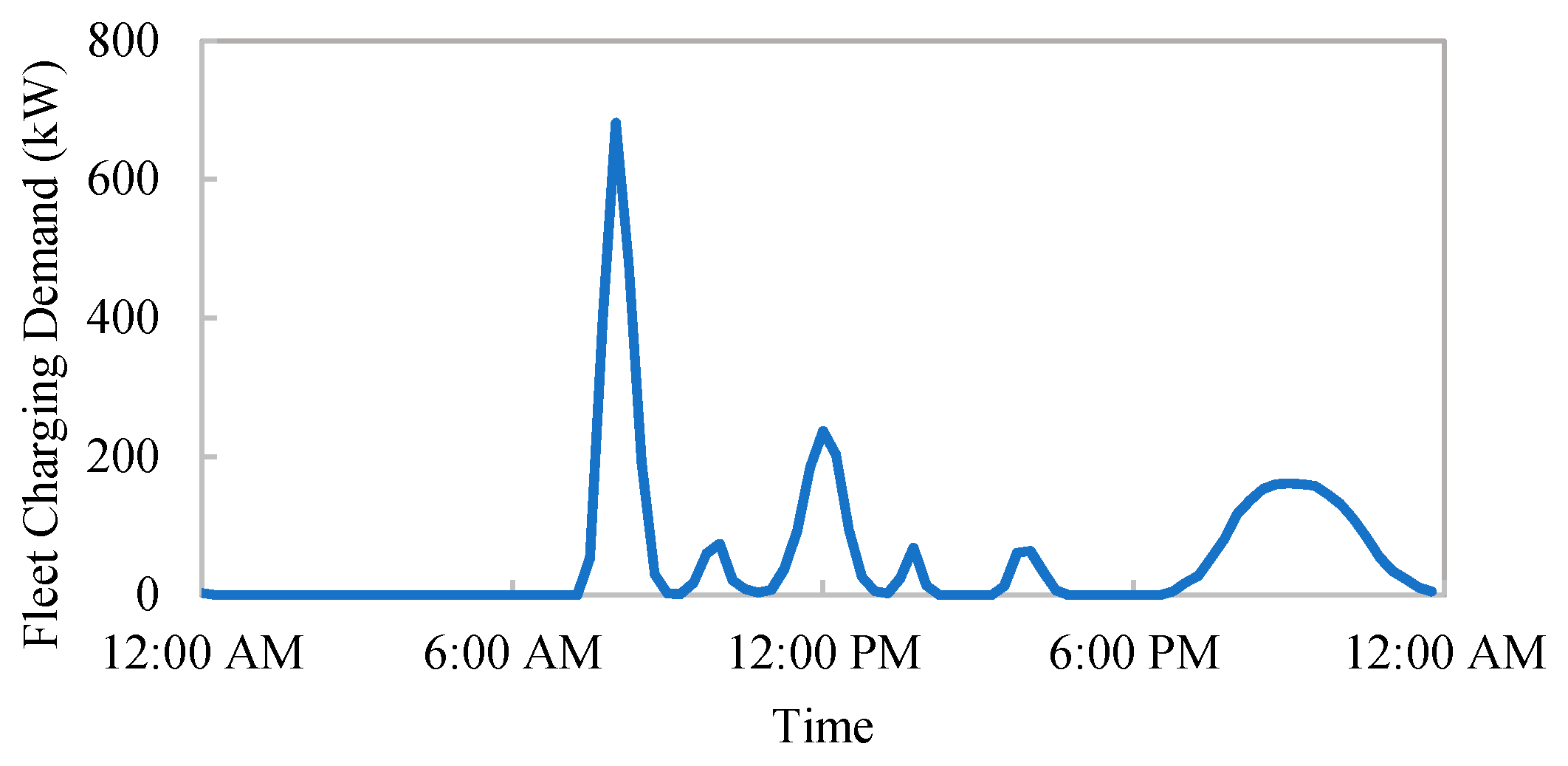
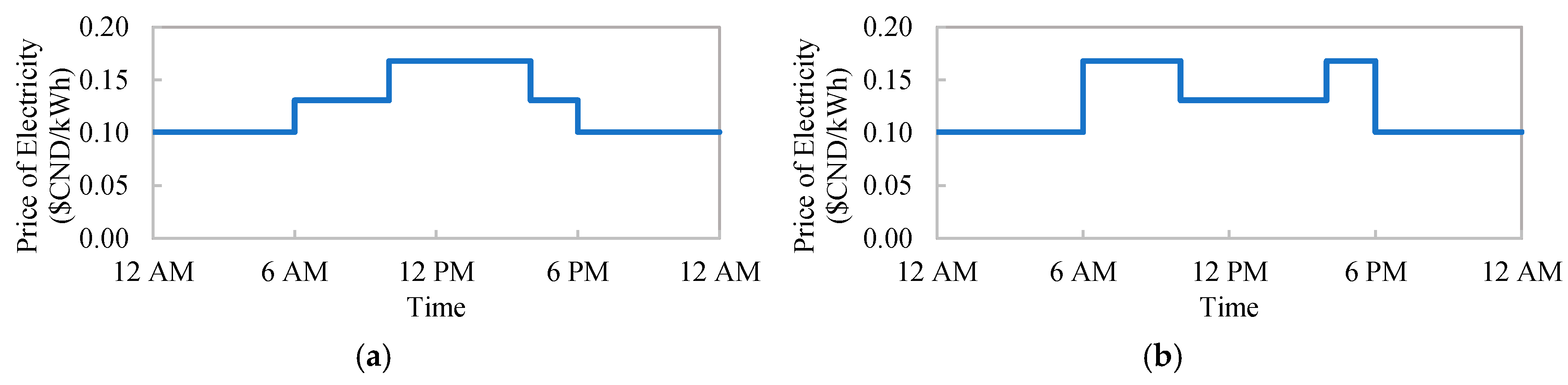
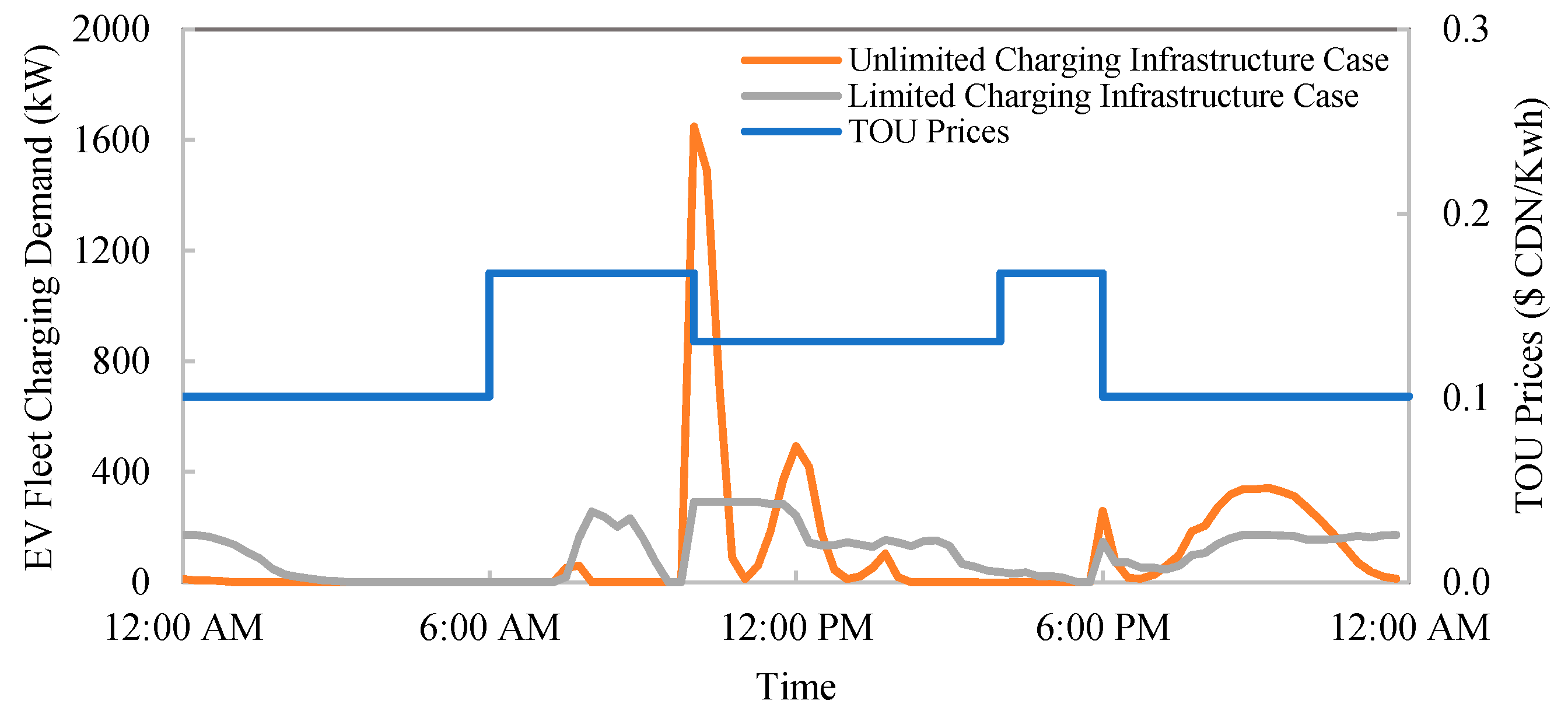
3.2. Effect of Charging Infrastructure on Uncontrolled Charging Behavior
- Peak charging behavior of the aggregate EV fleet.
- Queuing and service durations experienced by EVs
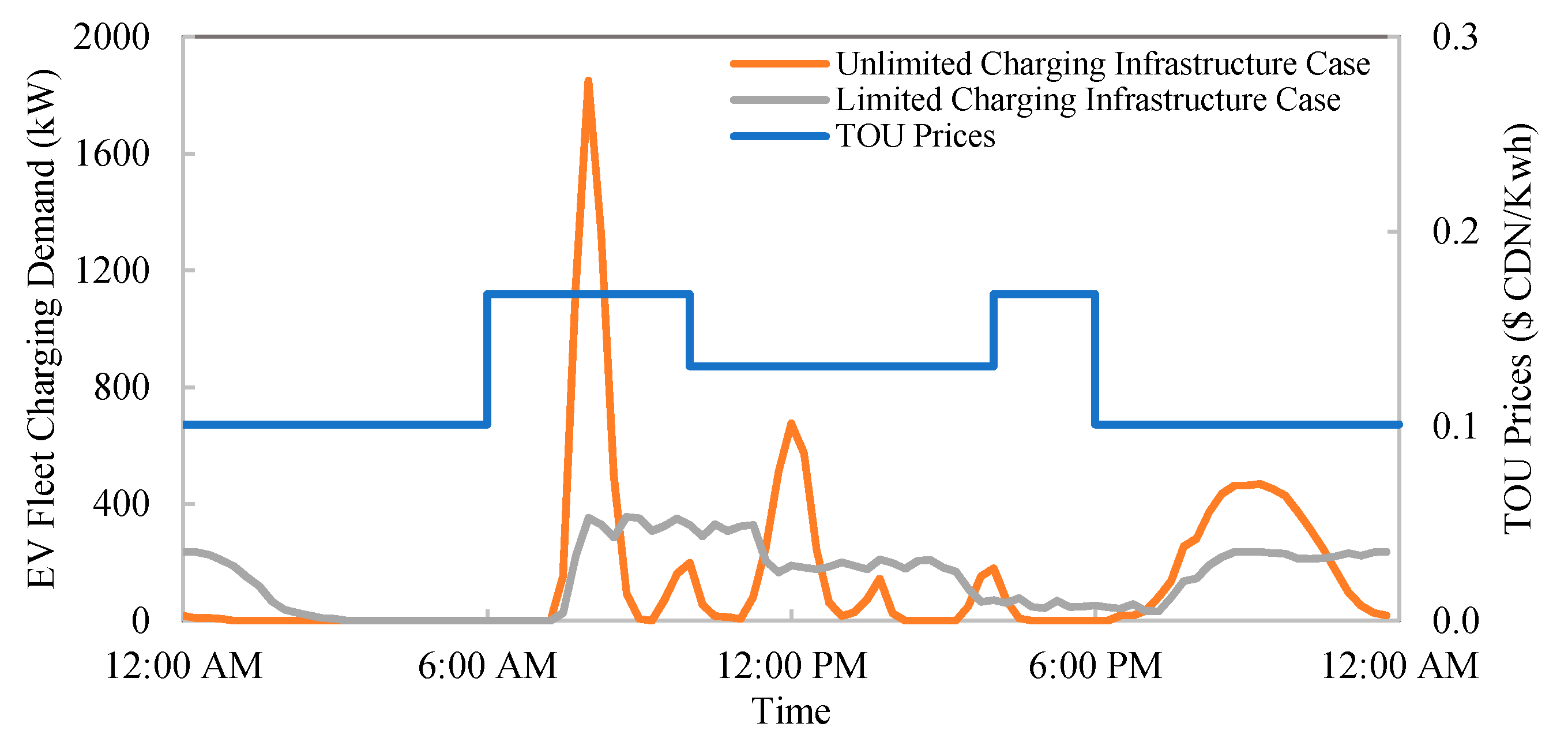
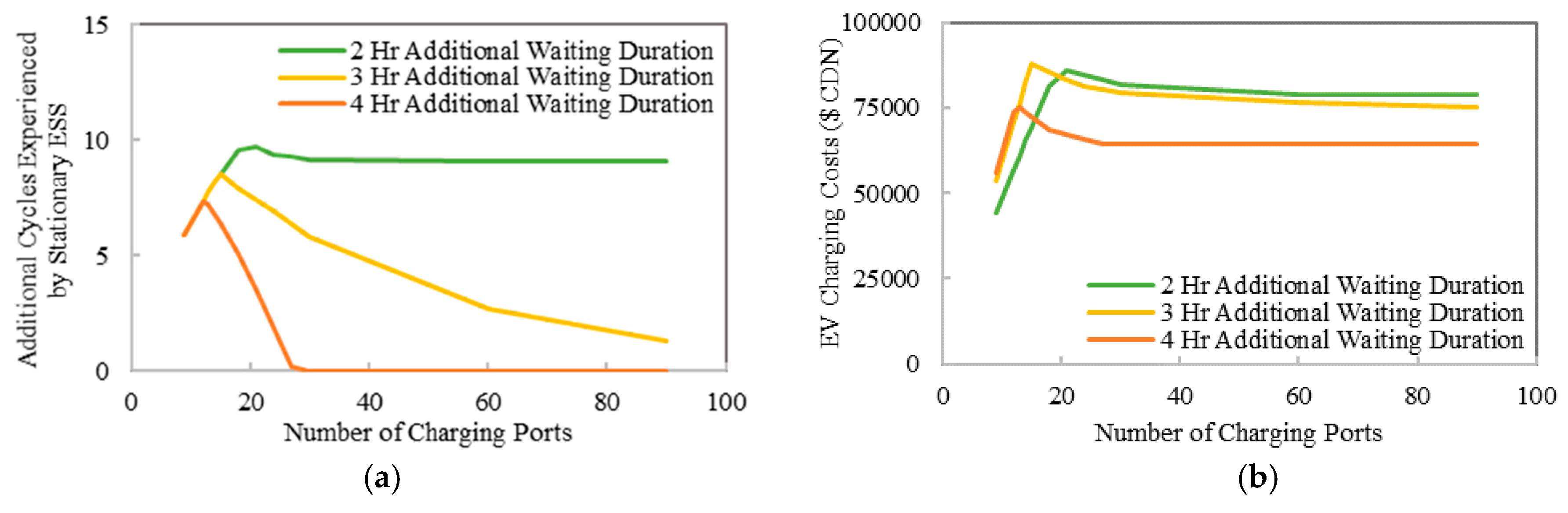
3.3. Effect of Charging Infrastructure on Controlled Charging Behavior
- Resiliency of controlled charging strategies against charging demand uncertainties.
- Charge delaying potential.
- Degree of interaction with stationary ESS.
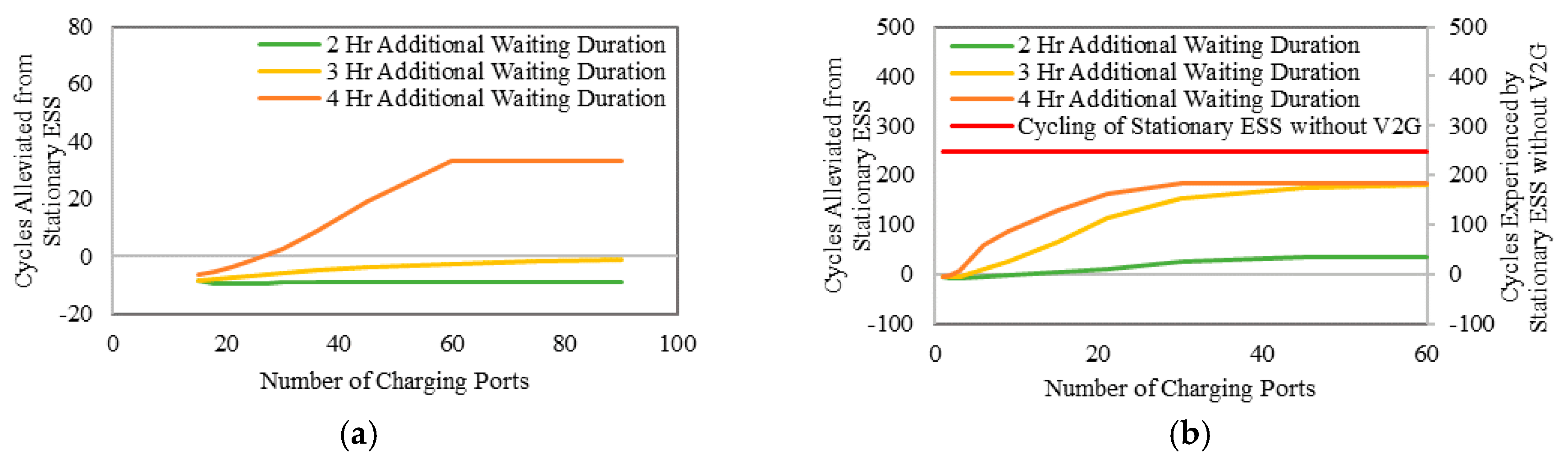
3.4. Effect of Charging Infrastructure on V2G
- Resiliency of V2G operation against charging demand uncertainties.
- Potential of V2G for fast response.
- Displacement of cycling experienced by stationary battery ESS.
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| BESS | Battery energy storage system |
| DER | Distributed energy resource |
| DC | Direct current |
| DR | Demand response |
| ESS | Energy storage system |
| EV | Electric vehicle |
| GHG | Greenhouse gas |
| HVAC | Heating, ventilation, and air conditioning |
| MIP | Mixed-integer problem |
| PV | Photovoltaic |
| SOC | State-of-charge |
| TOU | Time-of-use |
| V2G | Vehicle-to-grid |
| WLU | Wilfrid Laurier University |
| Variables | |
| Index for inflow energy vector set | |
| Index for energy demand load set | |
| Index for energy storage technologies | |
| Index for time | |
| Coupling matrix | |
| Annual operating costs of the system | |
| Annual fuel costs of the system | |
| Energy vector demands of the energy hub | |
| Energy vector inflow efficiency for energy storage system | |
| Energy vector outflow efficiency for energy storage system | |
| Charge efficiency for the EV fleet | |
| Discharge efficiency for the EV fleet | |
| Maximum storage capacity of storage system | |
| Loss of stored electricity due to driving for the EV fleet | |
| Energy vector feeds into the energy hub | |
| Maximum flow capacity for the feed energy vector | |
| Minimum flow capacity for the feed energy vector | |
| Inflow of energy vector into the energy storage system | |
| Maximum inflow rate of energy vectors into energy storage system | |
| Minimum inflow rate of energy vectors into energy storage system | |
| Outflow of energy vector into the energy storage system | |
| Maximum outflow rate of energy vectors into energy storage system | |
| Minimum outflow rate of energy vectors into energy storage system | |
| Net energy vector flow into energy storage system | |
| Power charged to the EV fleet | |
| Power discharged from the EV fleet | |
| Net flow of electricity into the EV fleet | |
| State-of-charge of storage system | |
| Maximum charge capacity of the storage system | |
| Minimum charge capacity of the storage system | |
| Overall objective function |
References
- El-Hawary, M.E. The smart grid—State-of-the-art and future trends. Electr. Power Compon. Syst. 2014, 42, 239–250. [Google Scholar] [CrossRef]
- Wang, C.; Nehrir, M.H. Analytical approaches for optimal placement of distributed generation sources in power systems. IEEE Trans. Power Syst. 2014, 19, 2068–2076. [Google Scholar] [CrossRef]
- Acharya, N.; Mahat, P.; Mithulananthan, N. An analytical approach for DG allocation in primary distribution network. Int. J. Electr. Power Energy Syst. 2006, 28, 669–678. [Google Scholar] [CrossRef]
- Perera, A.T.D.; Nik, V.M.; Mauree, D.; Scartezzini, J.L. Electrical hubs: An effective way to integrate non-dispatchable renewable energy sources with minimum impact to the grid. Appl. Energy 2017, 190, 232–248. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.Y.; Jin, Y.G.; Yoon, Y.T. Determining the Optimal Reserve Capacity in a Microgrid with Islanded Operation. IEEE Trans. Power Syst. 2016, 31, 1369–1376. [Google Scholar] [CrossRef]
- Akhavan-Rezai, E.; Shaaban, M.F.; El-Saadany, E.F.; Zidan, A. Uncoordinated charging impacts of electric vehicles on electric distribution grids: Normal and fast charging comparison. In Proceedings of the Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012. [Google Scholar]
- Kempton, W.; Tomić, J. Vehicle-to-grid power implementation: From stabilizing the grid to supporting large-scale renewable energy. J. Power Sources 2005, 144, 280–294. [Google Scholar] [CrossRef]
- Kempton, W.; Tomić, J. Vehicle-to-grid power fundamentals: Calculating capacity and net revenue. J. Power Sources 2005, 144, 268–279. [Google Scholar] [CrossRef]
- Weis, A.; Jaramillo, P.; Michalek, J. Estimating the potential of controlled plug-in hybrid electric vehicle charging to reduce operational and capacity expansion costs for electric power systems with high wind penetration. Appl. Energy 2014, 115, 190–204. [Google Scholar] [CrossRef]
- Hoehne, C.G.; Chester, M.V. Optimizing plug-in electric vehicle and vehicle-to-grid charge scheduling to minimize carbon emissions. Energy 2016, 115, 646–657. [Google Scholar] [CrossRef]
- Verzijlbergh, R.A.; Grond, M.O.W.; Lukszo, Z.; Slootweg, J.G.; Ilic, M.D. Network impacts and cost savings of controlled EV charging. IEEE Trans. Smart Grid 2012, 3, 1203–1212. [Google Scholar] [CrossRef]
- Schulze, M.; Friedrich, L.; Gautschi, M. Modeling and optimization of renewables: Applying the energy hub approach. In Proceedings of the IEEE International Conference on Sustainable Energy Technologies, Singapore, 24–27 November 2008; pp. 83–88. [Google Scholar]
- Lidula, N.W.A.; Rajapakse, A.D. Microgrids research: A review of experimental microgrids and test systems. Renew. Sustain. Energy Rev. 2011, 15, 186–202. [Google Scholar] [CrossRef]
- Geidl, M. Integrated Modeling and Optimization of Multi-Carrier Energy Systems. Ph.D. Thesis, ETH Zurich, Zürich, Switzerland, 2007. [Google Scholar]
- Evins, R.; Orehounig, K.; Dorer, V.; Carmeliet, J. New formulations of the ‘energy hub’ model to address operational constraints. Energy 2014, 73, 387–398. [Google Scholar] [CrossRef]
- Vahid-Pakdel, M.J.; Nojavan, S.; Mohammadi-Ivatloo, B.; Zare, K. Stochastic optimization of energy hub operation with consideration of thermal energy market and demand response. Energy Convers. Manag. 2017, 145, 117–128. [Google Scholar] [CrossRef]
- Biglia, A.; Caredda, F.V.; Fabrizio, E.; Filippi, M.; Mandas, N. Technical-economic feasibility of CHP systems in large hospitals through the Energy Hub method: The case of Cagliari AOB. Energy Build. 2017, 147, 101–112. [Google Scholar] [CrossRef]
- Maroufmashat, A.; Elkamel, A.; Fowler, M.; Sattari, S.; Roshandel, R.; Hajimiragha, A.; Walker, S.; Entchev, E. Modeling and optimization of a network of energy hubs to improve economic and emission considerations. Energy 2015, 93, 2546–2558. [Google Scholar] [CrossRef]
- Becker, S.; Frew, B.A.; Andresen, G.B.; Zeyer, T.; Schramm, S.; Greiner, M.; Jacobson, M.Z. Features of a fully renewable US electricity system: Optimized mixes of wind and solar PV and transmission grid extensions. Energy 2014, 72, 443–458. [Google Scholar] [CrossRef] [Green Version]
- Tarroja, B.; Mueller, F.; Eichman, J.D.; Samuelsen, S. Metrics for evaluating the impacts of intermittent renewable generation on utility load-balancing. Energy 2012, 42, 546–562. [Google Scholar] [CrossRef]
- Bukhsh, W.A.; Zhang, C.; Pinson, P. An Integrated Multiperiod OPF Model with Demand Response and Renewable Generation Uncertainty. IEEE Trans. Smart Grid 2016, 7, 1495–1503. [Google Scholar] [CrossRef]
- Nwulu, N.I.; Xia, X. Optimal dispatch for a microgrid incorporating renewables and demand response. Renew. Energy 2017, 101, 16–28. [Google Scholar] [CrossRef]
- Richardson, D.B.; Harvey, L.D.D. Optimizing renewable energy, demand response and energy storage to replace conventional fuels in Ontario, Canada. Energy 2015, 93, 1447–1455. [Google Scholar] [CrossRef]
- Hill, C.A.; Such, M.C.; Chen, D.; Gonzalez, J.; Grady, W.M.K. Battery energy storage for enabling integration of distributed solar power generation. IEEE Trans. Smart Grid 2012, 3, 850–857. [Google Scholar] [CrossRef]
- Santos, S.F.; Fitiwi, D.Z.; Cruz, M.R.M.; Cabrita, C.M.P.; Catalão, J.P.S. Impacts of optimal energy storage deployment and network reconfiguration on renewable integration level in distribution systems. Appl. Energy 2017, 185, 44–55. [Google Scholar] [CrossRef]
- Martins, R.; Hesse, H.C.; Jungbauer, J.; Vorbuchner, T.; Musilek, P. Optimal Component Sizing for Peak Shaving Industrial Applications. Energies 2018, 11, 2048. [Google Scholar] [CrossRef]
- Wang, B.; Zarghami, M.; Vaziri, M. Energy Management and Peak-Shaving in Grid-Connected Photovoltaic Systems Integrated with Battery Storage. In Proceedings of the 48th North American Power Symposium, Denver, CO, USA, 18–20 September 2016. [Google Scholar]
- Zhao, P.; Wang, J.; Dai, Y. Capacity allocation of a hybrid energy storage system for power system peak shaving at high wind power penetration level. Renew. Energy 2015, 75, 541–549. [Google Scholar] [CrossRef]
- Zou, P.; Chen, Q.; Xia, Q. Evaluating the Contribution of Energy Storages to Support Large-Scale Renewable Generation in Joint Energy and Ancillary Service Markets. IEEE Trans. Sustain. Energy 2016, 7, 808–818. [Google Scholar] [CrossRef]
- Tan, J.; Zhang, Y. Coordinated Control Strategy of a Battery Energy Storage System to Support a Wind Power Plant Providing Multi-Timescale Frequency. IEEE Trans. Sustain. Energy 2017, 8, 1140–1153. [Google Scholar] [CrossRef]
- Mwasilu, F.; Justo, J.J.; Kim, E.K.; Do, T.D.; Jung, J.W. Electric vehicles and smart grid interaction: A review on vehicle to grid and renewable energy sources integration. Renew. Sustain. Energy Rev. 2014, 34, 501–516. [Google Scholar] [CrossRef]
- Weis, A.; Michalek, J.J.; Jaramillo, P.; Lueken, R. Emissions and cost implications of controlled electric vehicle charging in the U.S. PJM interconnection. Environ. Sci. Technol. 2015, 49, 5813–5819. [Google Scholar] [CrossRef] [PubMed]
- Tarroja, B.; Zhang, L.; Wifvat, V.; Shaffer, B.; Samuelsen, S. Assessing the stationary energy storage equivalency of vehicle-to-grid charging battery electric vehicles. Energy 2016, 106, 673–690. [Google Scholar] [CrossRef]
- Sarabi, S.; Davigny, A.; Courtecuisse, V.; Riffonneau, Y.; Robyns, B. Potential of vehicle-to-grid ancillary services considering the uncertainties in plug-in electric vehicle availability and service/localization limitations in distribution grids. Appl. Energy 2016, 171, 523–540. [Google Scholar] [CrossRef]
- Rodrigues, Y.R.; de Souza, A.C.Z.; Ribeiro, P.F. An inclusive methodology for Plug-in electrical vehicle operation with G2V and V2G in smart microgrid environments. Int. J. Electr. Power Energy Syst. 2018, 102, 312–323. [Google Scholar] [CrossRef]
- Wilfrid Laurier University Campus Map. Available online: https://www.laurierathletics.com/generatepage.php?ID=40 (accessed on 5 November 2018).
- U.S. Department of Transportation. National Transportation Statistics; U.S. Department of Transportation: Washington, DC, USA, 2013; p. 505.
- Electricity Rates. (N.D.). Available online: https://www.oeb.ca/rates-and-your-bill/electricity-rates (accessed on 10 September 2018).
- Natural Gas Rates. (N.D.). Available online: https://www.oeb.ca/rates-and-your-bill/natural-gas-rates (accessed on 10 September 2018).
- TAF. A Clearer View on Ontario’ s Emissions: Practice Guidelines for Electricity Emissions Factors; The Atmospheric Fund (TAF): Toronto, ON, Canada, 2017. [Google Scholar]
- Intrinsik. Greenhouse Gas Emissions Associated with Various Methods of Power in Ontario; Intrinsik: Mississauga, ON, Canada, 2016. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Building (Type) | Total Conditioned Floor Area (m2) | Total Conditioned Volume (m3) | Heating Demand (MWh/yr) | Electricity Demand (MWh/yr) |
|---|---|---|---|---|
| Athletic (Athletic) | 12,105 | 36,390 | 2470.24 | 1853.52 |
| Clara Conrad (Residential) | 7500 | 20,018 | 1481.60 | 313.10 |
| Willison (Residential) | 6132 | 16,693 | 1222.35 | 283.18 |
| Library (Academic) | 9700 | 30,443 | 4120.65 | 930.34 |
| Science (Academic) | 14,778 | 43,013 | 4061.60 | 2538.10 |
| Science Research (Research) | 3996 | 11,868 | 291.06 | 1085.01 |
| 202 Regina (Commercial) | 7337 | 21,790 | 406.09 | 763.15 |
| Career and Coop (Commercial) | 2369 | 7041 | 294.63 | 254.88 |
| Parameter | Ranges Considered |
|---|---|
| Operational Mode |
|
| Charging Rate (kW) |
|
| Infrastructure Availability (# of Charging Ports) | 0–300 |
| Plug-in duration (Hours) | 0–4 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, Q.; Fowler, M.; Entchev, E.; Ribberink, H.; McCallum, R. The Role of Charging Infrastructure in Electric Vehicle Implementation within Smart Grids. Energies 2018, 11, 3362. https://doi.org/10.3390/en11123362
Kong Q, Fowler M, Entchev E, Ribberink H, McCallum R. The Role of Charging Infrastructure in Electric Vehicle Implementation within Smart Grids. Energies. 2018; 11(12):3362. https://doi.org/10.3390/en11123362
Chicago/Turabian StyleKong, Qing, Michael Fowler, Evgueniy Entchev, Hajo Ribberink, and Robert McCallum. 2018. "The Role of Charging Infrastructure in Electric Vehicle Implementation within Smart Grids" Energies 11, no. 12: 3362. https://doi.org/10.3390/en11123362
APA StyleKong, Q., Fowler, M., Entchev, E., Ribberink, H., & McCallum, R. (2018). The Role of Charging Infrastructure in Electric Vehicle Implementation within Smart Grids. Energies, 11(12), 3362. https://doi.org/10.3390/en11123362