New DC Grid Power Line Communication Technology Used in Networked LED Driver

Abstract
:1. Introduction
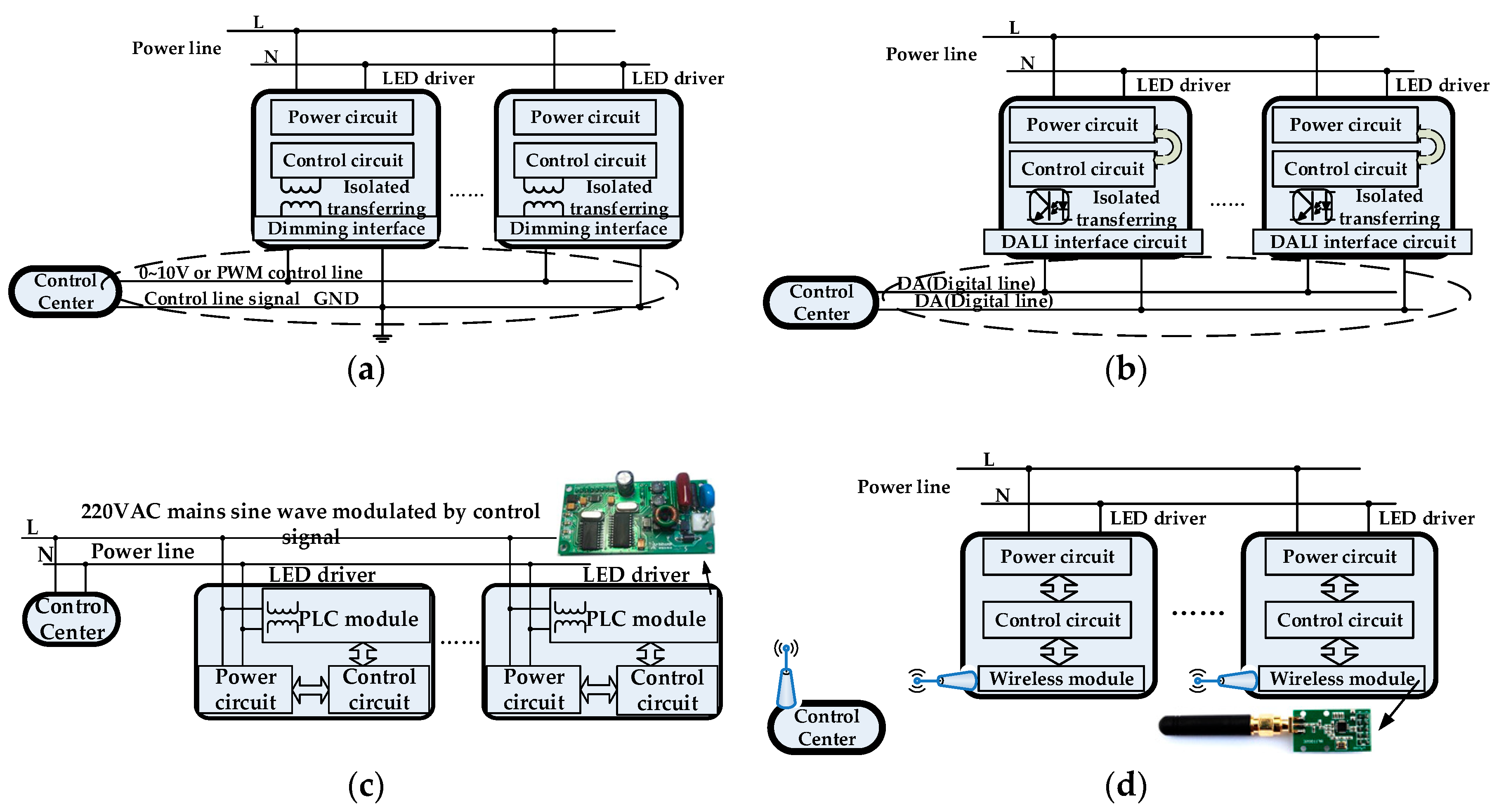
- Compared with 0–10 V, PWM, and DALI controlled systems, the communication line is omitted.
- The traditional AC mains PLC module is saved, and the signal transceiving function is realized by power electronic technology.
- Compared with the existing DC PLC technology, the influence of power line on communication is greatly reduced, and communication reliability is improved.
2. Light-Emitting Diode (LED) Networked Drive Technology Based on Direct Current (DC) Grid Power Line Communication (PLC)
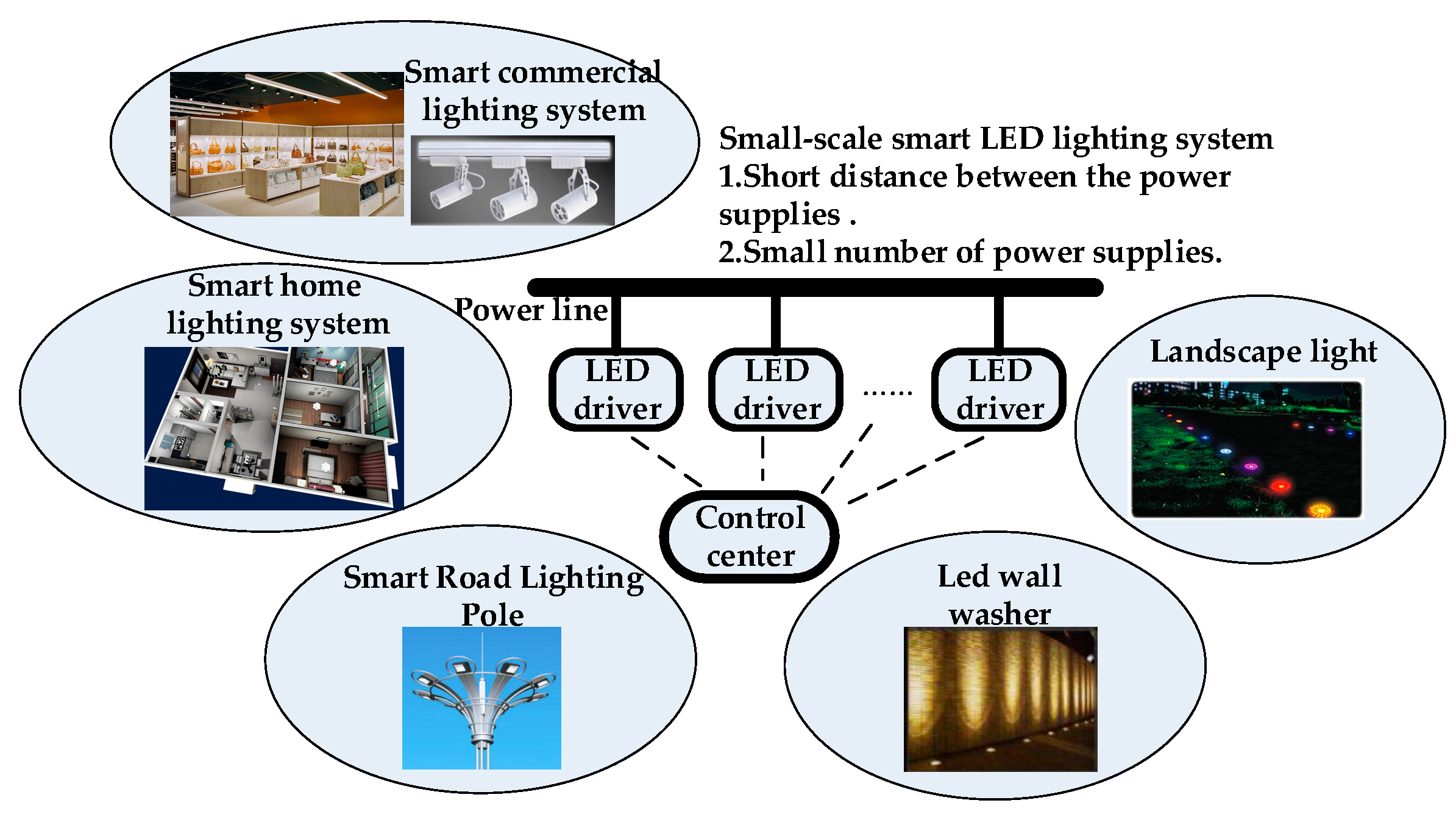
2.1. System Architecture
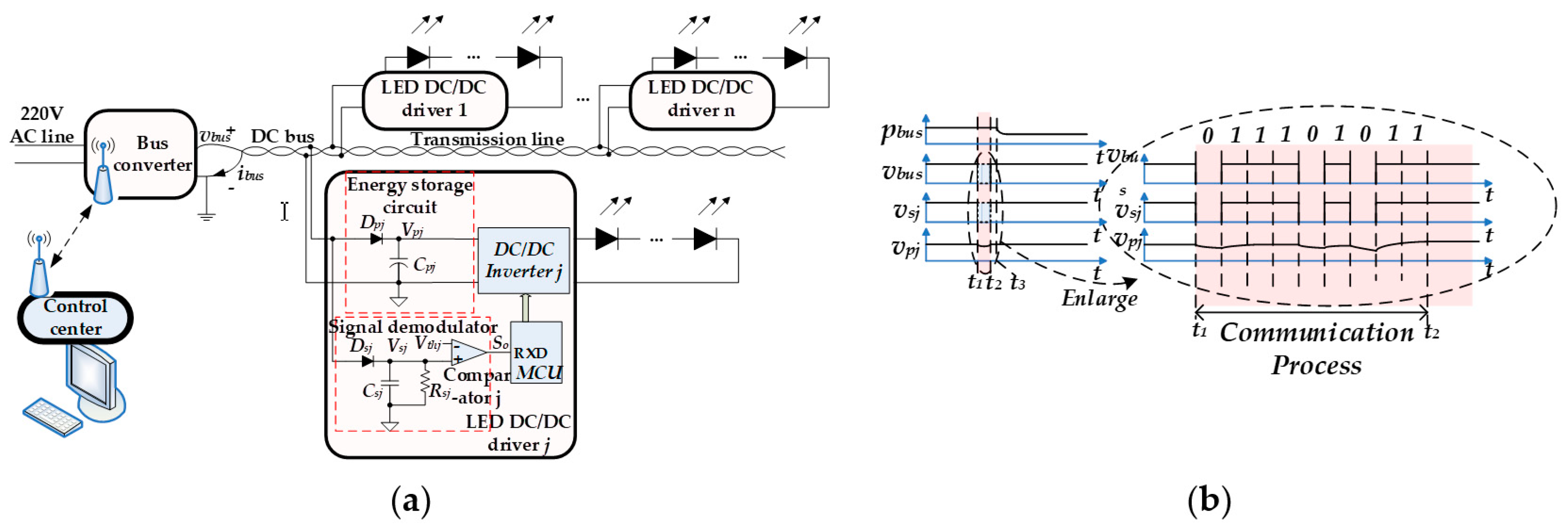
2.2. New DC Power Line Carrier Energy and Information Demodulation Principle
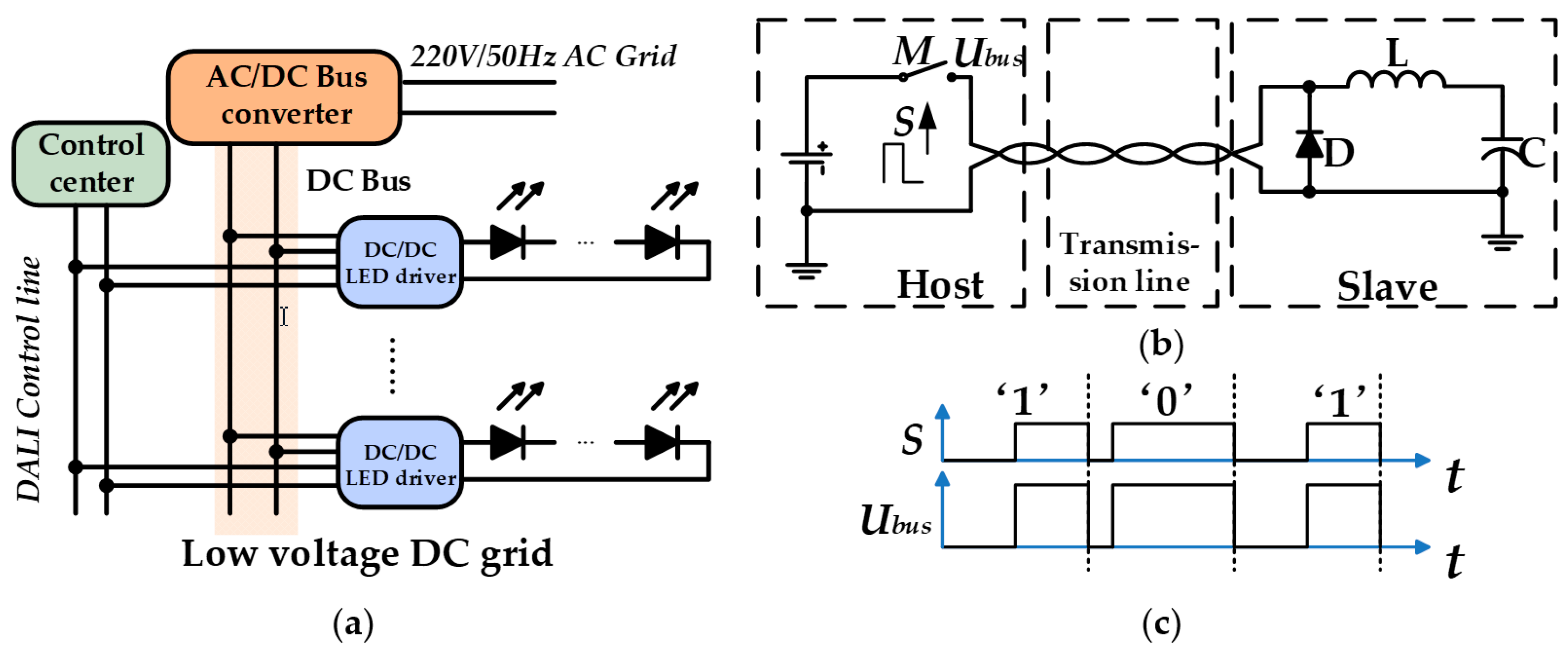
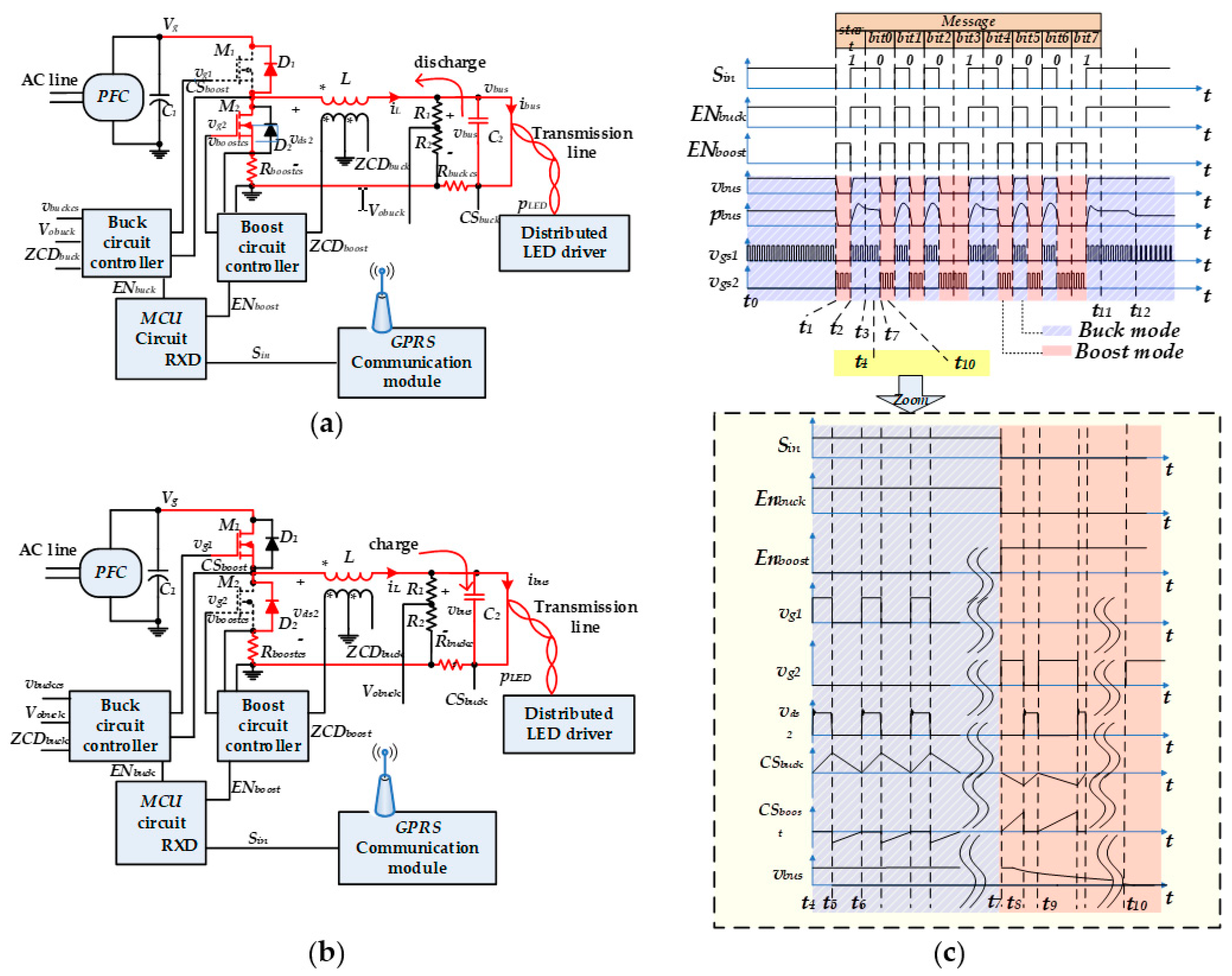
2.3. Working Principle of Bus Converter Based on Variable Modal Control
- (1)
- The bus voltage vbus changes rapidly, which is beneficial to improve the signal transmission speed and facilitate the operation of the signal demodulation circuit in the LED driver.
- (2)
- If there is no boost mode, the bus converter should make the busbar low voltage and can only rely on the load to discharge naturally. However, in the case of light load of the bus converter, especially when the load is turned off, when the bus converter is equivalent to no-load, the DC bus voltage vbus drops to 0, which takes a long time, and the energy storage of the LED driving power capacitor Cpj may not last so long. Boost mode allows the bus to quickly go low under light load conditions.
- (3)
- Since boost mode feeds back the energy of output capacitor C2 to input capacitor C1, it can be used again next time, so the energy utilization efficiency in the communication process is higher.
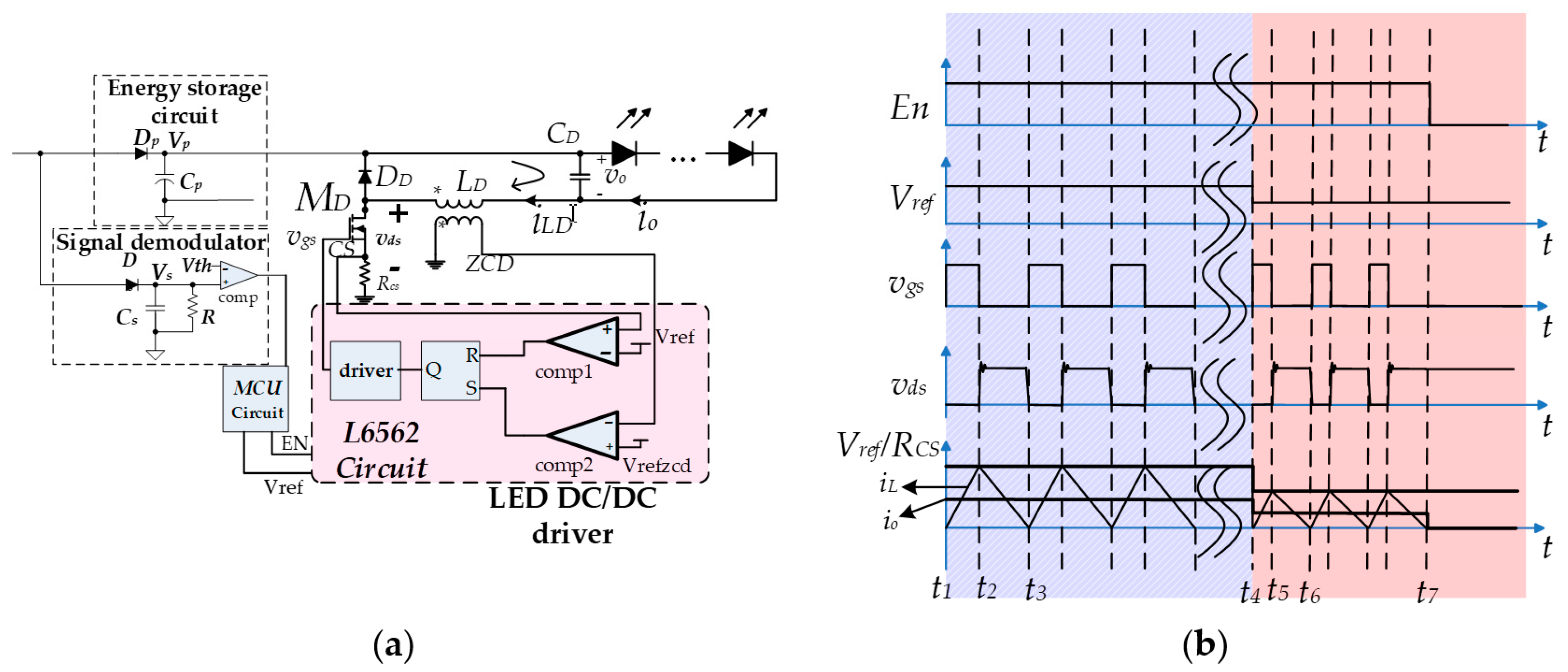
2.4. Distributed LED Drive Power DC/DC Converter Working Principle
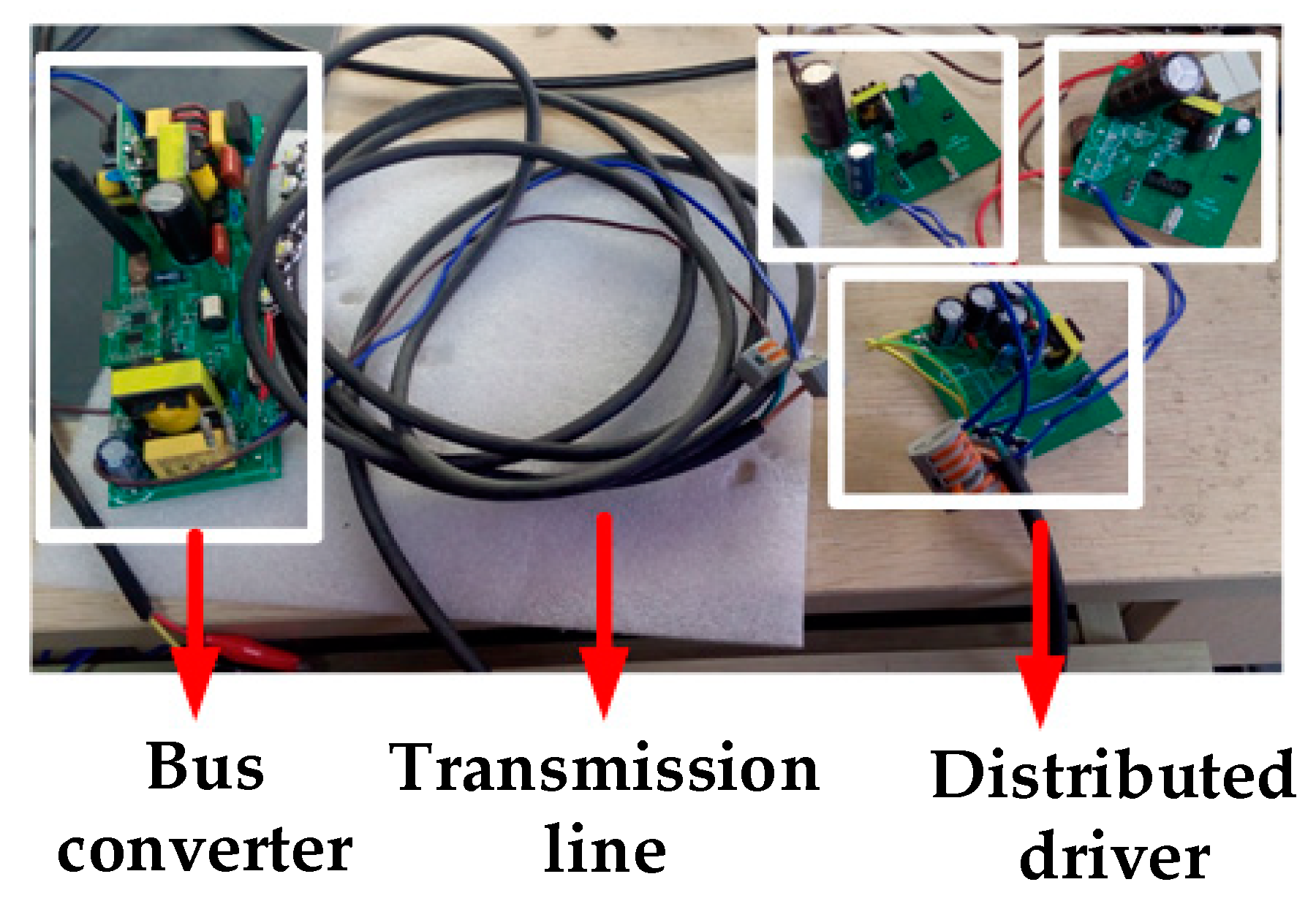
3. Experimental Verification
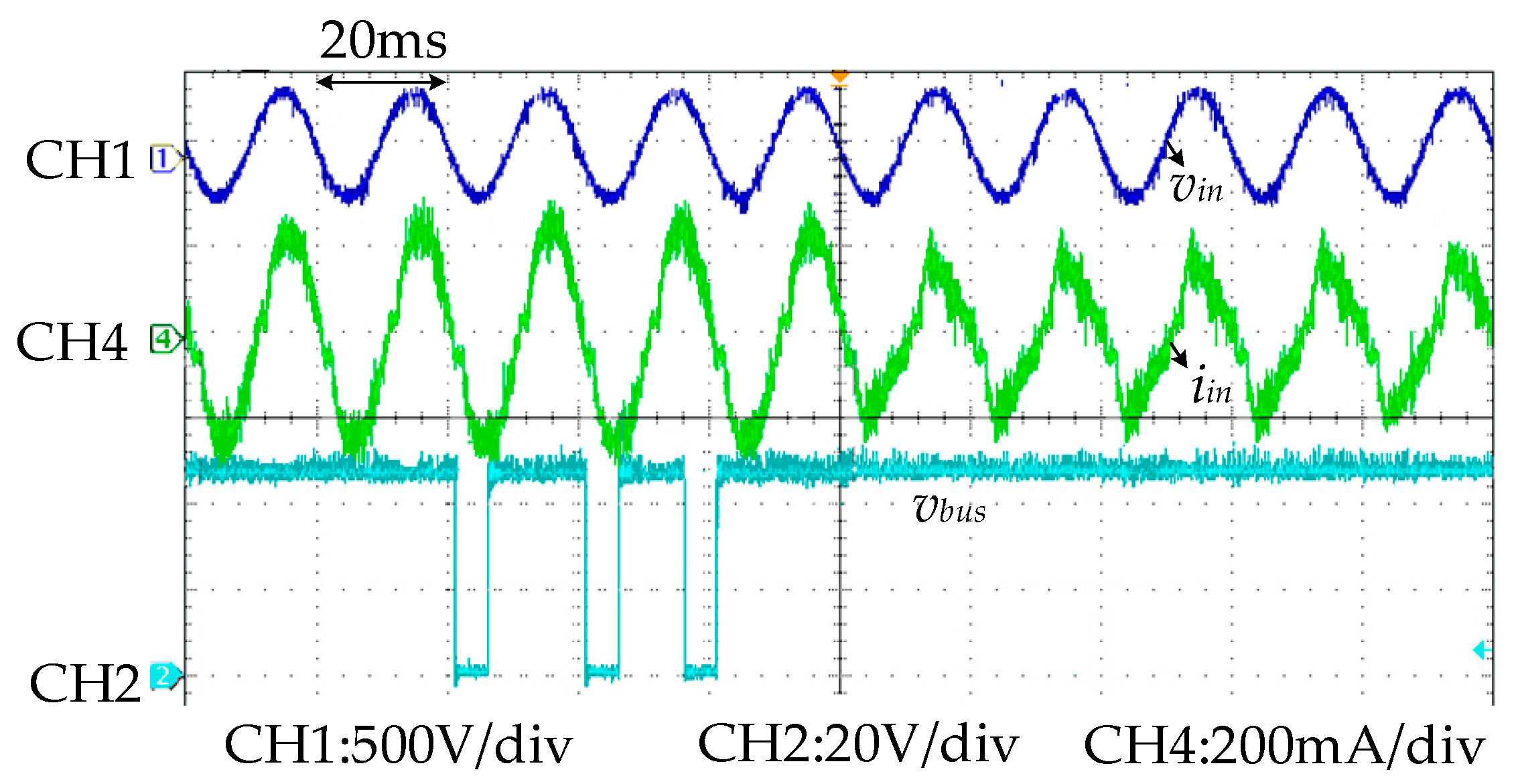
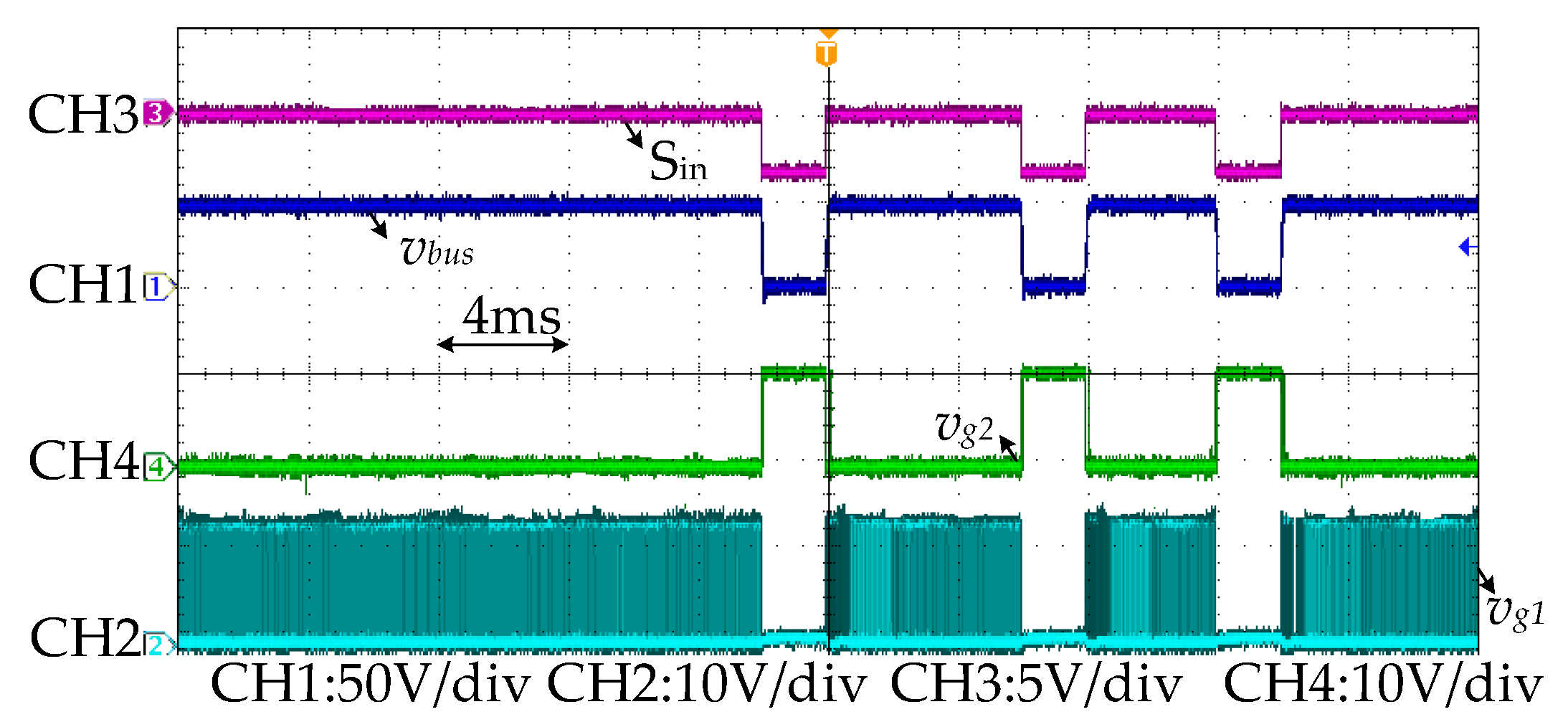
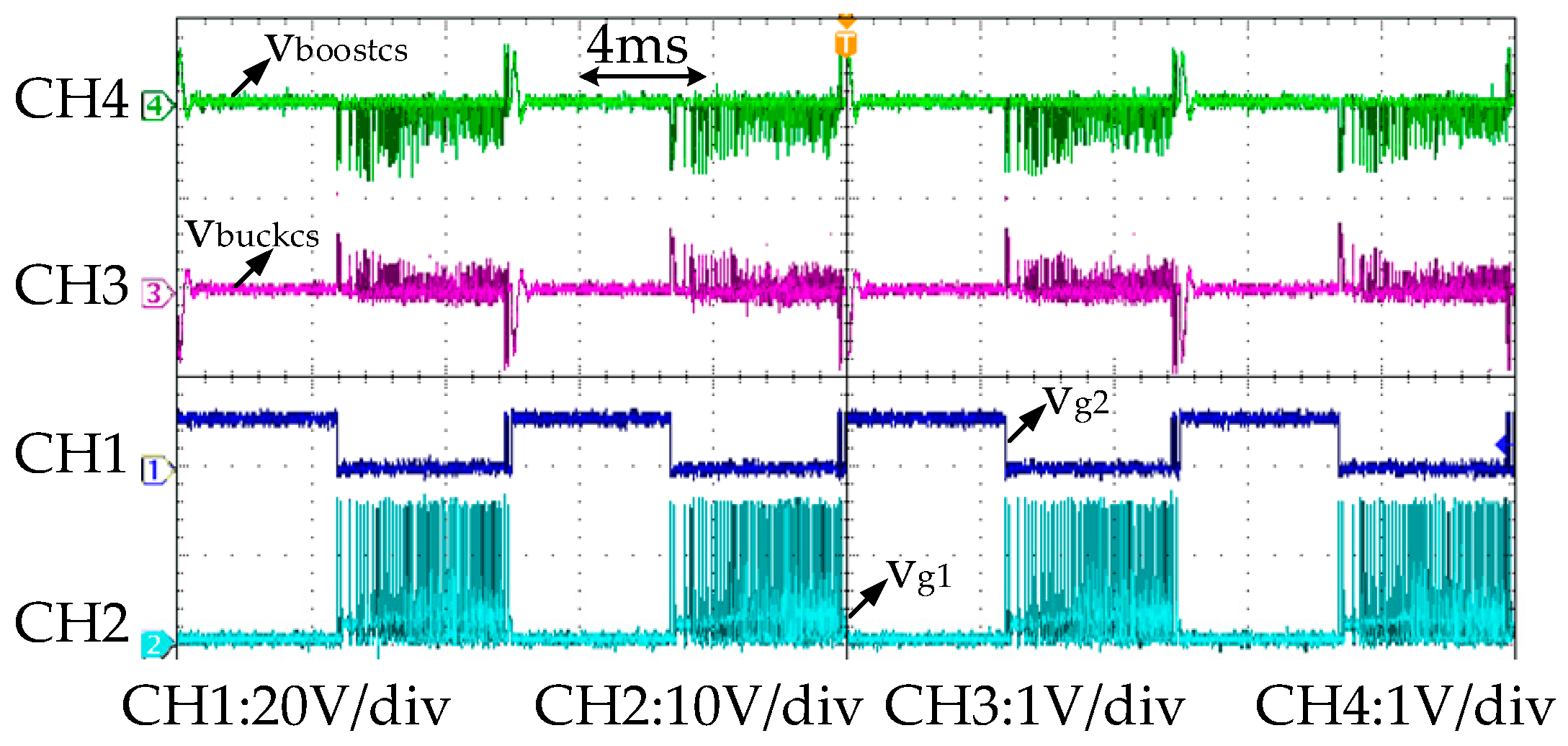
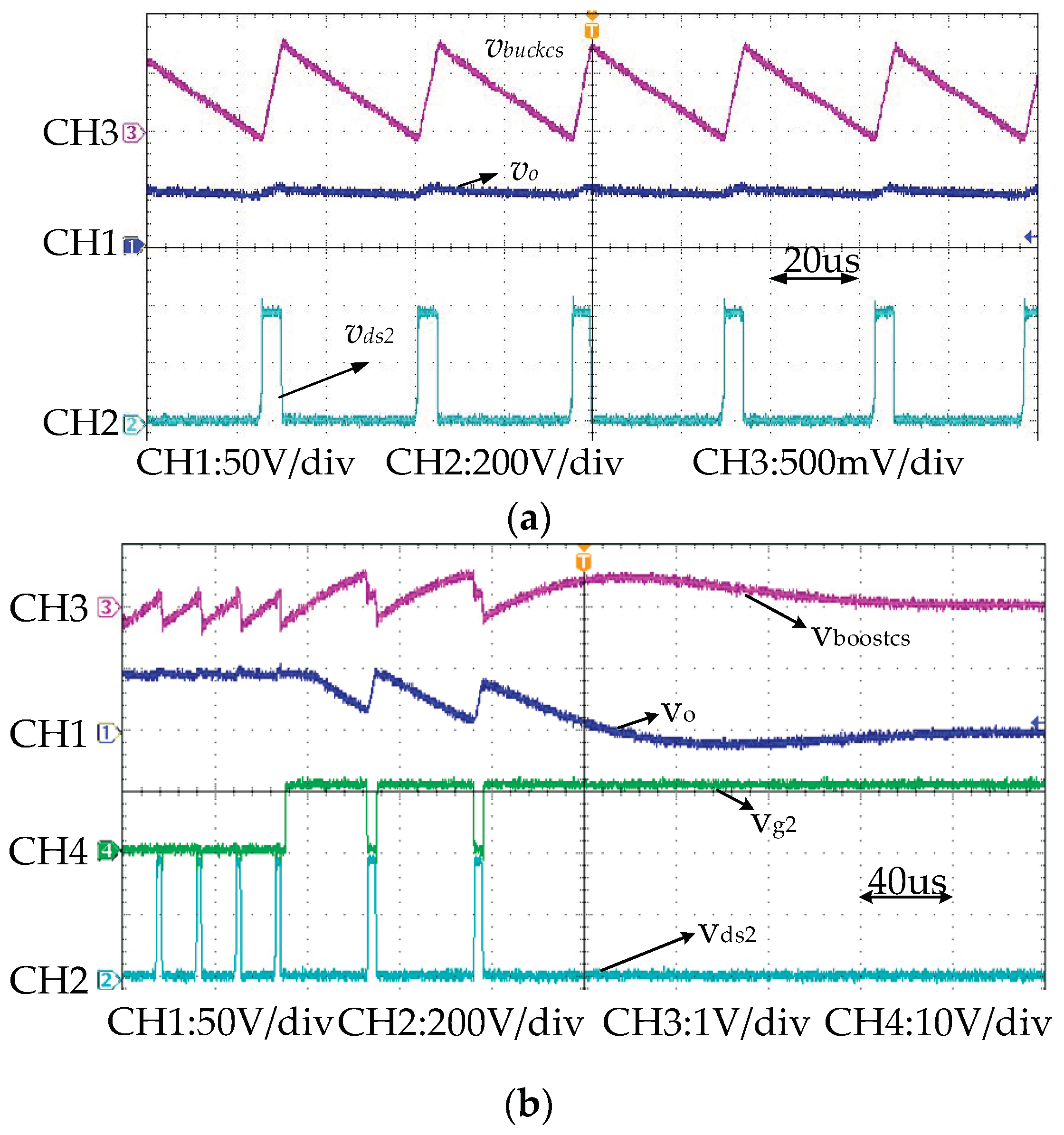
3.1. Bus Converter Working Principle Verification
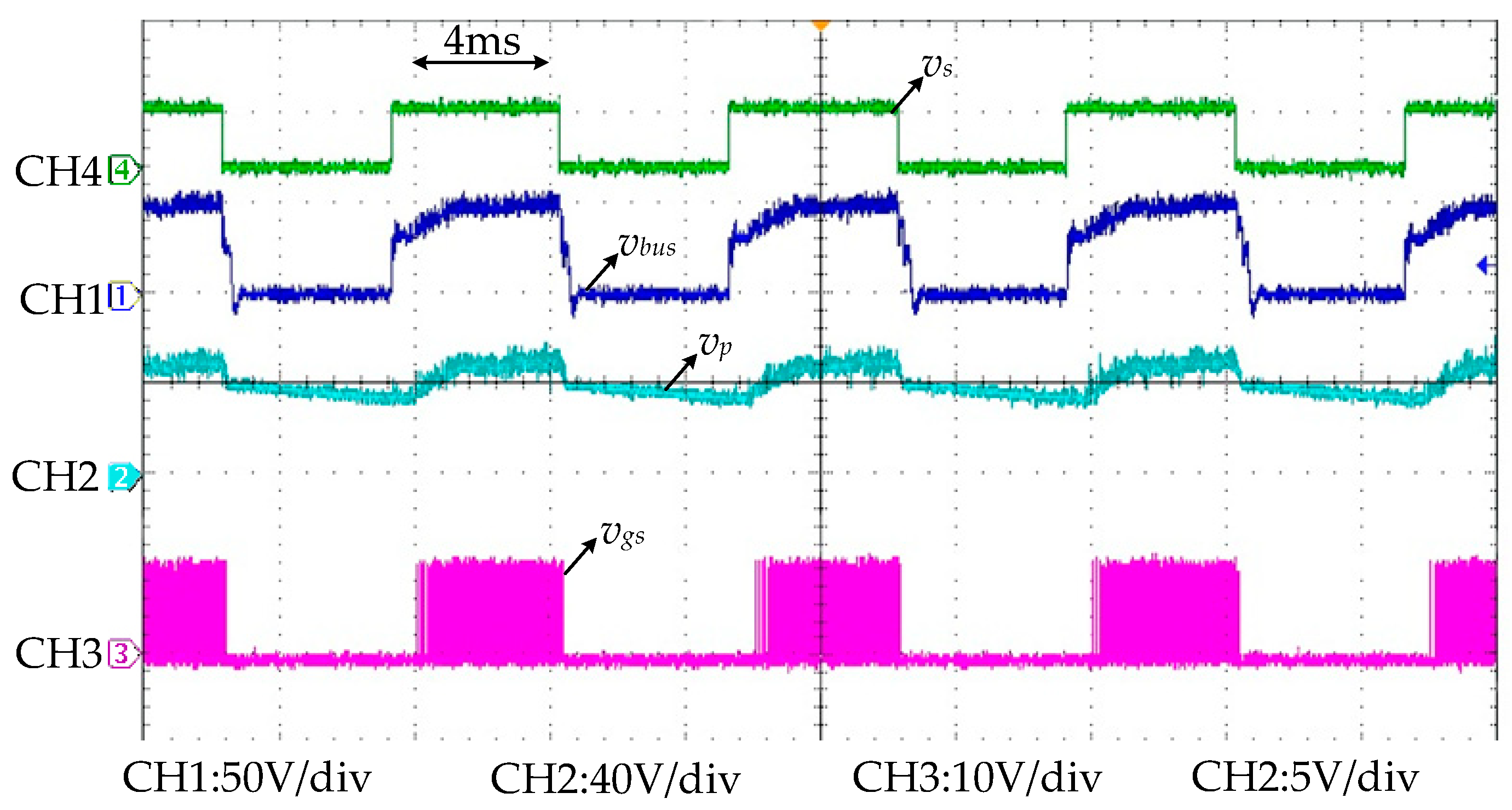
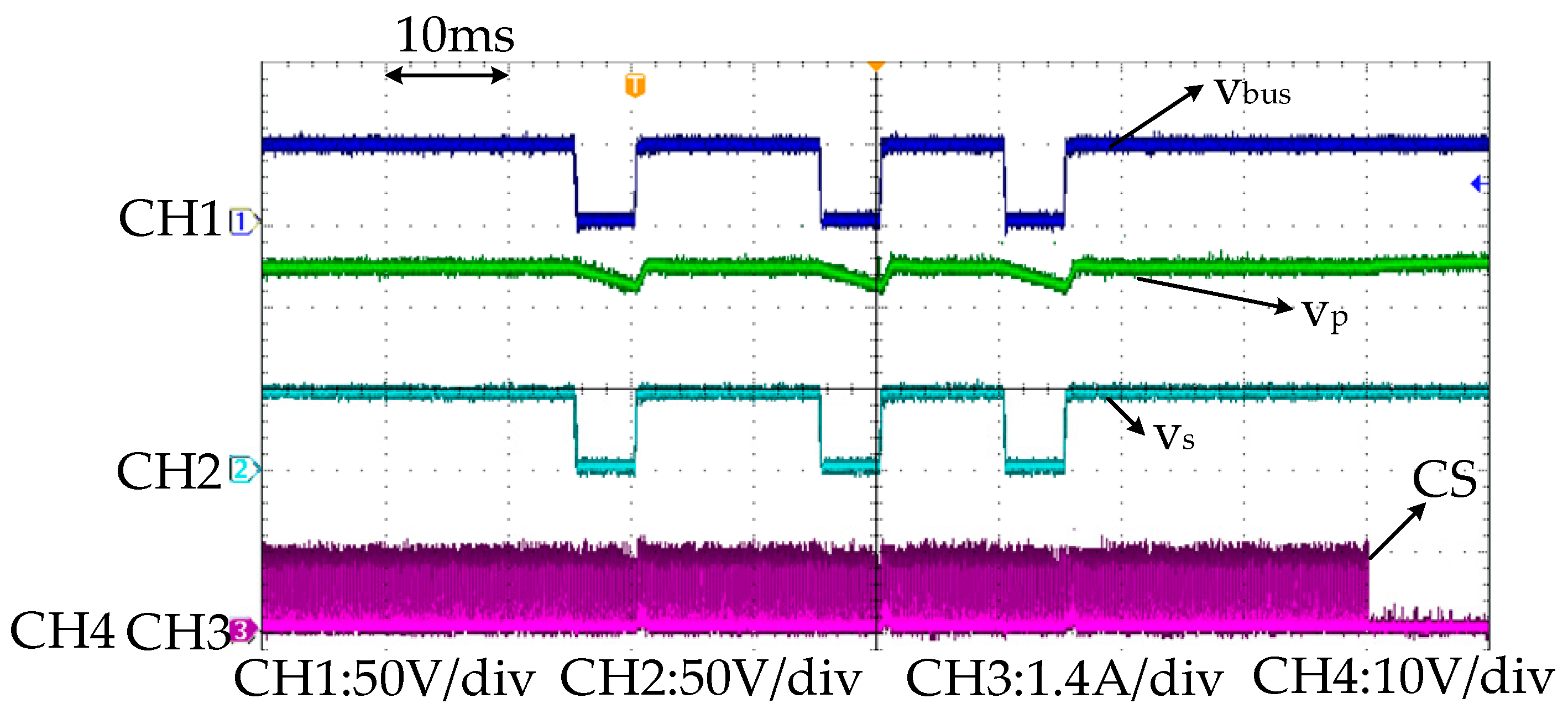
3.2. Distributed LED Driver Power Supply Working Principle Verification
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Vbus | DC bus voltage |
| ibus | DC bus current |
| pbus | DC bus input power |
| vpj | Output capacitance voltage of the energy storage part in the jth LED DC/DC driver |
| Cpj | Output capacitance of the energy storage part in the jth LED DC/DC driver |
| vsj | Output capacitance voltage of the signal demodulation part in the jth LED DC/DC driver |
| Csj | Output capacitance of the signal demodulation part in the jth LED DC/DC driver |
| vthj | Comparator reference of the signal demodulation part in the jth LED DC/DC driver |
| Rsj | Csj Discharge resistance of the signal demodulation part in the jth LED DC/DC driver |
| So | The input signal from the signal demodulation part to MCU in the jth LED DC/DC driver |
| Aj | The address of the jth LED DC/DC driver |
| C1 | Input capacitance of the bus converter |
| C2 | Output capacitance of the bus converter |
| Vg | Output voltage of PFC in the bus converter |
| vg1 | Drive signal of the bridge’s upper MOSFET in the bus converter |
| vg2 | Drive signal of the bridge’s lower MOSFET in the bus converter |
| CSboost | Peak current signal in Boost mode |
| CSbuck | Peak current signal in Buck mode |
| Rboostcs | Sampling resistance of Boost mode |
| Rbuckcs | Sampling resistance of Buck mode |
| ZCDbuck | Control signal that M1 is turn on |
| ZCDboost | Control signal that M2 is turn off |
| Vobuck | Feedback signal of sampling output voltage in Buck mode |
| iL | Inductor current in the bus converter |
| R1 | Sampling resistor |
| R2 | Sampling resistor |
| Sin | Signal transmitted by the bus converter |
| Vbuckcs | Voltage across the sampling resistor Rbuckcs in buck mode |
| Vboostcs | Voltage across the sampling resistor Rboostcs in boost mode |
| Vds2 | The midpoint voltage of bridge in the bus converter |
| ENbuck | Enable signal of Buck mode |
| ENboost | Enable signal of Boost mode |
| io | Output current of the LED DC/DC driver |
| iLD | The current of inductance LD in the LED DC/DC driver |
| iLDpk | The current peak of inductance LD in the LED DC/DC driver |
| Vp | Output capacitance voltage of the energy storage part in the LED DC/DC driver |
| Cp | Output capacitance of the energy storage part in the LED DC/DC driver |
| Vs | Output capacitance voltage of the signal demodulation part in the LED DC/DC driver |
| Cs | Output capacitance of the signal demodulation part in the LED DC/DC driver |
| Vth | Comparator reference of the signal demodulation part in the LED DC/DC driver |
| Rs | Cs Discharge resistance of the signal demodulation part in the LED DC/DC driver |
| LD | Inductance of the LED DC/DC driver |
| CD | Output capacitor of the LED DC/DC driver |
| vo | Output voltage of the LED DC/DC driver |
| Rcs | Sampling resistance of the LED DC/DC driver |
| EN | Enable signal of L6562 in the LED DC/DC driver |
| Vref | Comparator reference of L6562’s comp1 in the LED DC/DC driver |
| Vrefzcd | Comparator reference of L6562’s comp2 in the LED DC/DC driver |
| Vds | Voltage between drain and source of MD |
References
- Yan, W.; Hui, S.Y.R.; Chung, H.S. Energy Saving of Large-Scale High-Intensity-Discharge Lamp Lighting Networks Using a Central Reactive Power Control System. IEEE Trans. Ind. Electron. 2009, 56, 3069–3078. [Google Scholar] [CrossRef]
- Djuretic, A.; Kostic, M. Actual energy savings when replacing high-pressure sodium with LED luminaires in street lighting. Energy 2018, 157, 367–378. [Google Scholar] [CrossRef]
- Beccali, M.; Bonomolo, M.; Leccese, F.; Lista, D.; Salvadori, G. On the impact of safety requirements, energy prices and investment costs in street lighting refurbishment design. Energy 2018, 165, 739–759. [Google Scholar] [CrossRef]
- Jin, H.; Jin, S.; Chen, L.; Cen, S.; Yuan, K. Research on the Lighting Performance of LED Street Lights with Different Color Temperatures. IEEE Photonics J. 2015, 7, 1–9. [Google Scholar] [CrossRef]
- Gentile, N.; Govén, T.; Laike, T. A field study of fluorescent and LED classroom lighting. Light. Res. Technol. 2016, 1–20. [Google Scholar] [CrossRef]
- Fantozzi, F.; Leccese, F.; Salvadori, G.; Rocca, M.; Garofalo, M. LED Lighting for Indoor Sports Facilities: Can Its Use Be Considered as Sustainable Solution from a Techno-Economic Standpoint? Sustainability 2016, 8, 618. [Google Scholar] [CrossRef]
- Perdahci, C.; Akin, H.C.; Cekic, O. A comparative study of fluorescent and LED lighting in industrial facilities. In Proceedings of the 2018 7th International Conference on Clean and Green Energy (ICCGE 2018), Paris, France, 7–9 February 2018. [Google Scholar]
- Liang, Y.; Yimin, C.; Baorong, C. Integrated analog dimming controller for 0–10 V dimming system. In Proceedings of the 2013 10th China International Forum on Solid State Lighting (ChinaSSL), Beijing, China, 10–12 November 2013; pp. 147–149. [Google Scholar]
- Dai, G.N.; Dai, B.L. Application of DALI Bus in Large High-end Lighting. Jiangsu Constr. 2016, 6, 113–115. [Google Scholar] [CrossRef]
- Wang, S.; Liu, Y.; Yuan-Lin, C.; Jyun-Yan, C. Development of DALI-based electronic ballast with energy saving control for ultraviolet lamps. In Proceedings of the 2010 8th IEEE International Conference on Industrial Informatics, Osaka, Japan, 13–16 July 2010; pp. 214–219. [Google Scholar]
- Bellido-Outeirino, F.J.; Flores-Arias, J.M.; Domingo-Perez, F.; Gil-de-Castro, A.; Moreno-Munoz, A. Building lighting automation through the integration of DALI with wireless sensor networks. IEEE Trans. Consum. Electron. 2012, 58, 47–52. [Google Scholar] [CrossRef]
- Liang, T.J.; Huang, J.F.; Yadav, P.K. Design and implementation of dimmable LED control circuit with DALI protocol. In Proceedings of the 2016 IEEE International Conference on Power and Energy (PECon), Nice, France, 28–29 November 2016; pp. 121–126. [Google Scholar]
- Wang, P. A Design of DALI Illumination System Based on RS-485. China Illum. Eng. J. 2012, 23. [Google Scholar] [CrossRef]
- Khalilian, H.; Farzanehfard, H.; Adib, E.; Esteki, M. Analysis of a New Single-Stage Soft-Switching Power-Factor-Correction LED Driver With Low DC-Bus Voltage. IEEE Trans. Ind. Electron. 2018, 65, 3858–3865. [Google Scholar] [CrossRef]
- Vallbè, B.; Balcells, J.; Bogónez-Franco, P.; Mata, J.; Gago, X. Immunity of power line communications (PLC) in disturbed networks. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 1621–1625. [Google Scholar]
- Han, R.; Yang, C.; Chen, X.; Han, X.; Zhang, J.; Li, C. Design of an Intelligent White-OLED Lighting System using power line communication. In Proceedings of the 2012 2nd International Conference on Consumer Electronics, Communications and Networks (CECNet), YiChang, China, 21–23 April 2012; pp. 3191–3194. [Google Scholar]
- Beer, A.S.d.; Emleh, A.; Ferreira, H.C.; Vinck, A.J.H. Effects of LED lamps on the power-line communications channel. In Proceedings of the 2013 IEEE 17th International Symposium on Power Line Communications and Its Applications, Johannesburg, South Africa, 24–27 March 2013; pp. 209–213. [Google Scholar]
- Amarsingh, A.A.; Latchman, H.A.; Yang, D. Narrowband Power Line Communications: Enabling the Smart Grid. IEEE Potentials 2014, 33, 16–21. [Google Scholar] [CrossRef]
- Kubota, H.; Suzuki, K.; Kawakimi, I.; Sakugawa, M.; Kondo, H. High frequency band dispersed-tone power line communication modem for networked appliances. IEEE Trans. Consumer Electron. 2006, 52, 44–50. [Google Scholar] [CrossRef]
- Mak, S.T. TWACS®, A Power Line Communication Technology for Power Distribution Network Control and Monitoring. IEEE Trans. Power Deliv. 1986, 1, 66–72. [Google Scholar] [CrossRef]
- Ferreira, H.C.; Grove, H.M.; Hooijen, O.; Vinck, A.J.H. Power line communications: An overview. In Proceedings of the IEEE AFRICON’96, Stellenbosch, South Africa, 27–27 September 1996; Volume 552, pp. 558–563. [Google Scholar]
- Tan, Y.K.; Huynh, T.P.; Wang, Z. Smart Personal Sensor Network Control for Energy Saving in DC Grid Powered LED Lighting System. IEEE Trans. Smart Grid 2013, 4, 669–676. [Google Scholar] [CrossRef]
- Cardesín, J.; García-Llera, D.; López-Corominas, E.; Calleja, A.J.; Ribas, J.; Gacio, D. Low cost intelligent LED driver for public Lighting Smart Grids. In Proceedings of the 2013 International Conference on New Concepts in Smart Cities: Fostering Public and Private Alliances (SmartMILE), Gijon, Spain, 11–13 December 2013; pp. 1–6. [Google Scholar]
- Wu, J.; Li, C.; He, X. A novel power line communication technique based on power electronics circuit topology. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 Feberary 2010; pp. 681–685. [Google Scholar]
- Lin, Z.; Du, J.; Wu, J.; He, X. Novel communication method between power converters for DC micro-grid applications. In Proceedings of the 2015 IEEE First International Conference on DC Microgrids (ICDCM), Atlanta, GA, USA, 7–10 June 2015; pp. 92–96. [Google Scholar]
- Wang, R.; Du, J.; Hu, S.; Wu, J.; He, X. An embedded power line communication technique for DC-DC Distributed Power System based on the switching ripple. In Proceedings of the 2014 International Power Electronics and Application Conference and Exposition, Shanghai, China, 5–8 November 2014; pp. 811–815. [Google Scholar]
- Du, J.; Wu, J.; Wang, R.; Lin, Z.; He, X. DC Power-Line Communication Based on Power/Signal Dual Modulation in Phase Shift Full-Bridge Converters. IEEE Trans. Power Electron. 2017, 32, 693–702. [Google Scholar] [CrossRef]
- Wu, J.; Zong, S.; He, X. Power/signal time division multiplexing technique based on power electronic circuits. In Proceedings of the 2011 Twenty-Sixth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 6–11 March 2011; pp. 1710–1714. [Google Scholar]
- Li, C.; Wu, J.; He, X. Realization of a general LED lighting system based on a novel Power Line Communication technology. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 Feberary 2010; pp. 2300–2304. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Remote Control Scheme | Control Lines | Installation | Cost |
|---|---|---|---|
| 0–10 V or PWM | 2 Lines | Complex | High |
| DALI | 2 Lines | Complex | High |
| Power line communication (PLC) | No | Very simple | High |
| Wireless | No | Simple | High |
| Bus Converter | Quantity | 1 |
| Input voltage | 220 V/50 Hz | |
| PFC voltage | 400 V | |
| Output voltage maximum | 48 V | |
| Total power maximum | 30 W | |
| Communication baud rate | 9600 | |
| Distributed LED Driver | Quantity | 3 |
| Single rated power | 10 W | |
| Single load structure | 3 W LED 3 series 3 parallel | |
| Single load rated current | 700 mA |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, H.; Hu, J.; Zhou, X.; Lu, Z.; Wang, L. New DC Grid Power Line Communication Technology Used in Networked LED Driver. Energies 2018, 11, 3531. https://doi.org/10.3390/en11123531
Lin H, Hu J, Zhou X, Lu Z, Wang L. New DC Grid Power Line Communication Technology Used in Networked LED Driver. Energies. 2018; 11(12):3531. https://doi.org/10.3390/en11123531
Chicago/Turabian StyleLin, Huipin, Jin Hu, Xiao Zhou, Zhengyu Lu, and Lujun Wang. 2018. "New DC Grid Power Line Communication Technology Used in Networked LED Driver" Energies 11, no. 12: 3531. https://doi.org/10.3390/en11123531
APA StyleLin, H., Hu, J., Zhou, X., Lu, Z., & Wang, L. (2018). New DC Grid Power Line Communication Technology Used in Networked LED Driver. Energies, 11(12), 3531. https://doi.org/10.3390/en11123531