1. Introduction
In renewable energy Hybrid Power Systems (HPS) applications, the generation power is usually intermittent and variable, the load power is also dynamic with the daily energy consumption, such as in Fuel Cell Hybrid Power Systems (FC-HPS), wind turbine farms, and solar arrays.
The main objective for the FC-HPS [
1,
2,
3,
4] and other hybrid energy systems [
5,
6,
7] is to efficiently operate these systems based on rule-based and optimization-based strategies proposed in the last years [
8,
9]. As it is known, the deterministic rule-based strategy is already available in the market due to their reduced complexity in implementation, but this type of strategy cannot find the optimum solution [
10], so the research interest has switched to optimization-based Real-Time Optimization (RTO) strategies, even if the complexity increases [
1,
11]. These strategies can find and track in real-time the optimal solution or a suboptimal solution close to it [
7,
12]. The RTO strategies usually use optimization algorithms such as the Extremum Seeking (ES) algorithms [
13,
14], the Equivalent Consumption Minimization Strategy (ECMS) [
15,
16], the intelligent algorithms [
17,
18,
19], the Model Predictive Control (MPC) schemes [
20,
21], and so on [
22,
23,
24,
25,
26]. From these RTO-strategies, the ECMSs based on Pontryagin’s Minimum Principle (PMP) [
26,
27] or Dynamic Programming (DP) are most used for FC-HPS [
10].
Different ES-based RTO strategies based on classical [
28,
29], modified [
30,
31], and advanced [
13,
14,
32,
33] ES algorithms were proposed recently to optimally operate the FC-HPS. The modified ES algorithm improves the tracking robustness compared to conventional ES algorithm due to tge use of a Band-Pass Filter (BPF) to process more power harmonics into the seeking signal [
30,
31]. The advanced ES algorithm improves the tracking accuracy compared to modified ES algorithm by using modulation of the dither amplitude with the magnitude of first harmonics of the FC power. Furthermore, the FC ripple power decreases around the Maximum Efficiency Point (MEP), which is faster found [
32]. A comparative study of the ES-based RTO strategies is presented in [
33,
34]. The global ES (GES) algorithm tracks the global Maximum Power Point (MPP) instead of local MPP, improving with more than 30% the efficiency of the photovoltaic (PV) system [
35,
36,
37]. The GES algorithm [
35] uses two BPFs instead of one BPF [
36]. The design rules for the GES algorithms are detailed in [
37].
PV arrays, wind turbines and battery stacks generate the needed load power in renewable energy systems and a design to comply the power flow balance on the Direct Current (DC) bus could oversize the battery stack due to the high dynamics of the load profile and variability of the available renewable energy. This issue can be solved by using the Load-Following (LFW) control of the FC boost converter [
38] to compensate the power flow balance on the DC and the battery will operate in charge sustaining mode, which means reducing the size of the batteries stack. Thus, considering additionally the reduction of maintenance costs, the overall cost of FC-HPS remains within the same range as the battery-based HPS cost. Furthermore, for example, the LFW control is simpler to be implemented compared to ES-based RTO routine to rescale the air flow rate (
AirFr) of the Proton Exchange Membrane FC (PEMFC) system or other energy management strategies based on states’ diagram [
39]. Different RTO-strategies have been proposed for FC-HPS to improve the free air breathing of PEMFC system through the MEP [
40] or MPP [
41] tracking techniques, or based on other robust control techniques [
42] which are analyzed and compared in [
43]. The MPP tracking technique improves the tracking accuracy of a photovoltaic/FC-HPS by simultaneously optimizing both the PV and FC systems [
44]. The renewable HPS architecture requires a FC system and electrolyzer to store the hydrogen in order to mitigate the variability of the renewable power, but a regenerative FC stack could solve this issue in one device [
45,
46].
Besides the LFW control of the FC system [
38], other different algorithms can be used as well [
46], such as artificial intelligent algorithms [
47] based on neural networks [
48], genetic algorithms [
49], or data fusion approach [
50]. The combinatorial techniques [
51], the Model Reference Adaptive Control (MRAC) [
52], the metaheuristic approaches [
53], the prediction of the load demand [
54], and ECMSs techniques [
55] are other methods proposed to optimize the operation of the FC-HPS.
The static feed-forward (sFF) control of the FC system was first implemented in practice [
56], but many other control algorithms for air compressor systems have been designed based on the Hardware-in-Loop System (HILS) technique [
56,
57,
58,
59,
60,
61,
62,
63,
64,
65,
66,
67]. The HILS-based second order sliding mode controller implemented in a commercial twin screw air compressor sub-optimally controls the air feed system [
57] avoiding oxygen starvation and the compressor surge phenomenon using the load governor method and constrained extremum technique [
58]. Thus, the
AirFr of the PEMFC system can be optimally control by a second order sliding mode control [
59]. The better mitigation of load ripples and pulses on PEMFC operation can be ensured using a disturbance rejection control [
60] or a differential flatness approach [
61] compared to a classic Proportional–Integral (PI) controller [
56]. Also, by appropriate control of the cathode system, the lifetime of the PEMFC system could be increased to 25 years in next decade [
62]. The Linear Quadratic Regulator (LQR)/Linear Quadratic Gaussian (LQG) control maintains the best oxygen stoichiometry in PEMFC systems [
63], but other optimal control solutions for the
AirFr are proposed in literature based on ES algorithm [
32], feed-forward fuzzy Proportional Integral Derivative (PID) control [
64], optimal PID plus fuzzy controller [
65], time delay control [
66], and adaptive control [
67].
Besides control for air systems, other control solutions to improve the fuel economy of the fuel system were proposed [
43] such as global optimization methods based on fuzzy logic [
68] and genetic [
49] algorithms, adaptive algorithms such as adaptive fuzzy control [
69] and adaptive Energy Management Strategy (EMS) [
70], but most of them require prior knowledge of the driving cycle. Furthermore, these algorithms are difficult to implement in RTO strategies due to its computational complexity; so, the research field of designing efficient and simple RTO strategies for FC-HPS still remains challenging.
In this paper, using Matlab-Simulink version 2013
®, the performance of three LFW control-based FC-HPS topologies is compared considering the optimization loop implemented to size the FC boost converter (the new RTO3 strategy),
AirFr regulator (the RTO2 strategy [
71]), or Fuel Flow rate (
FuelFr) regulator (the RTO1 strategy [
72]). All the topologies use one optimization loop and LFW control to mitigate the variability of the load demand and renewable energy on battery State-Of-Charge (
SOC). The performance of the proposed RTO strategies is compared to the sFF reference strategy under same unknown profile of the Load Cycle (LC) based on the following indicators: (1) the FC net power, (2) the fuel consumption efficiency, (3) the electrical efficiency of the FC system, and (4) the total fuel consumption. The optimization function used in this study is designed to reduce the total fuel consumption under unknown LC, being a linear weighted function of the FC energy efficiency and the fuel consumption efficiency through the weighting coefficients
knet and
kfuel. The GES algorithm is used to find in real-time the global maximum of the optimization function [
35].
Design of the weighting coefficients
knet and
kfuel will improve the fuel economy of a FC vehicle under unknown LC. Thus, the performance is estimated for all three FC-HPS topologies compared to the sFF strategy using same profile for the constant and variable load demand. The RTO strategies for the FC-HPS topologies clearly differ in the place where the optimization is performed and the LFW control is applied (see
Table 1). Finally, considering the obtained performance, some guiding design rules to choose the switching RTO strategy are given.
The paper is organized as follows: optimization objectives and algorithms for FC-HPS based on the extremum seeking algorithm are very briefly mentioned in
Section 2. The LFW control-based RTO strategies with specific optimization loop are designed in
Section 3 considering the power flow balance at the DC bus. The results for all three RTO strategies are presented in
Section 4 compared to the sFF strategy for constant and variable load, without and with renewable energy support.
Section 5 discusses the results obtained and the last section concludes the paper.
3. Energy Management Strategies for the Renewable Fuel Cell Hybrid Power Systems
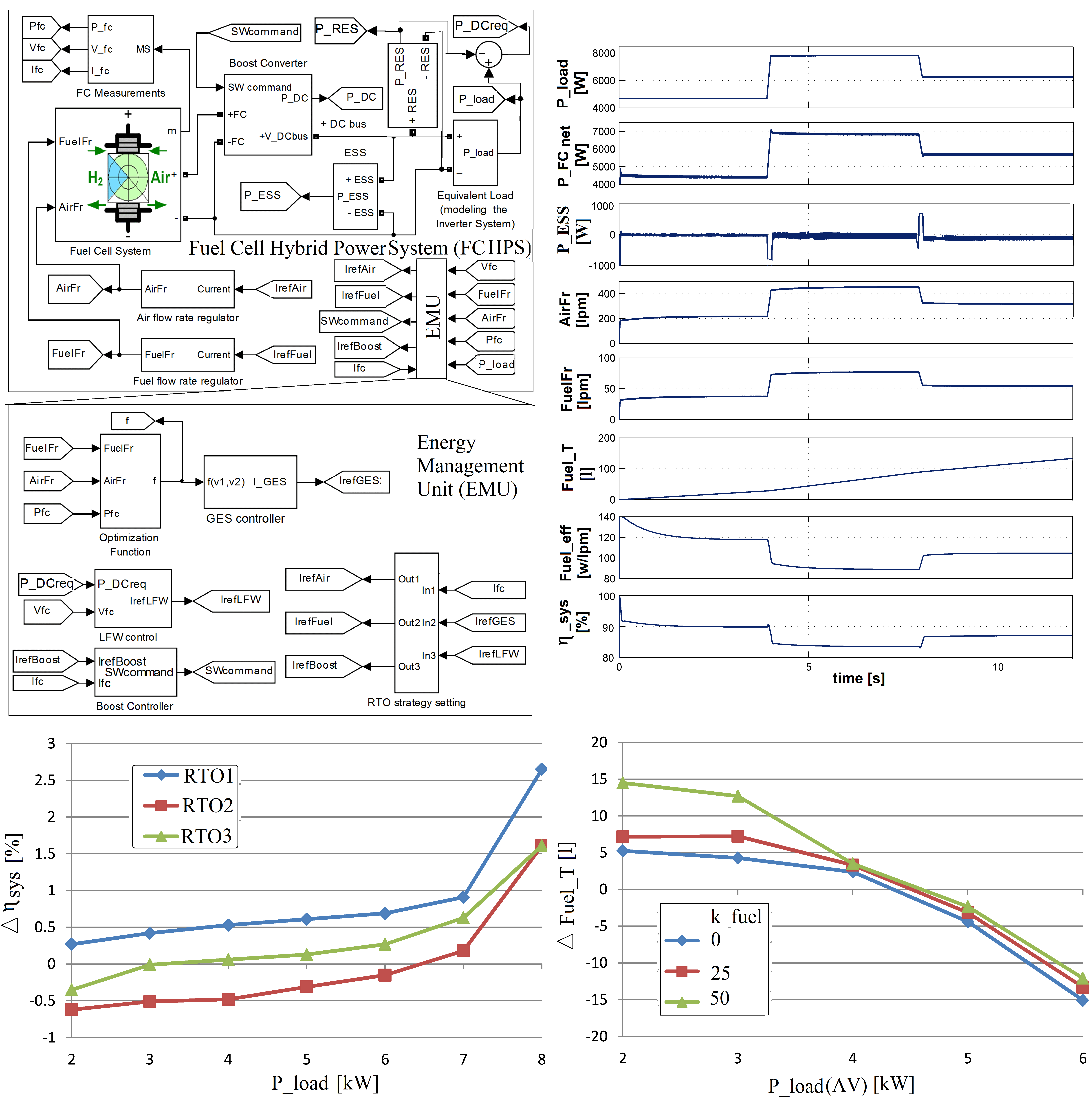
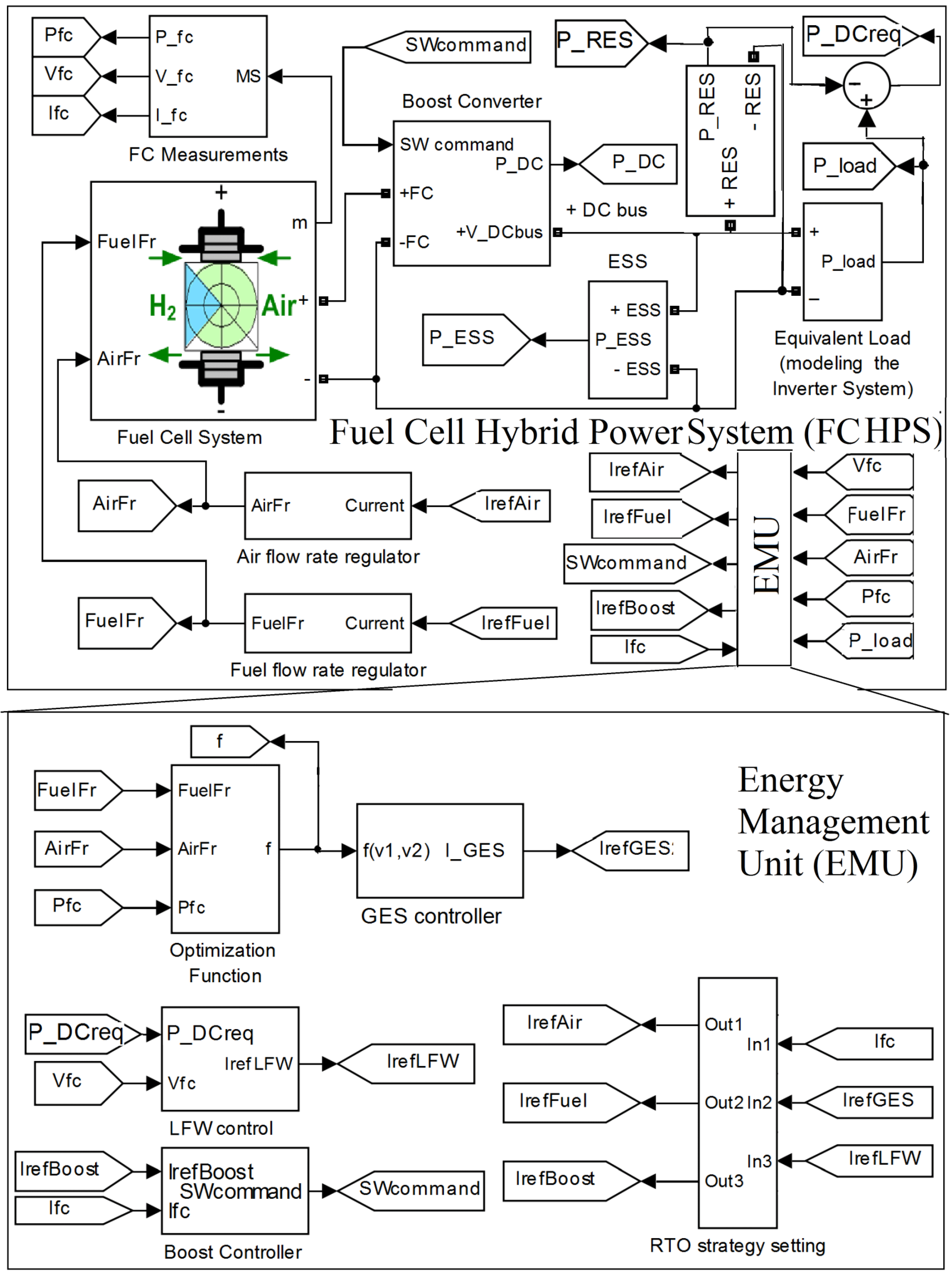
The FC-HPS based on Renewable Energy Sources (RES block in
Figure 3—top) and the EMU (
Figure 3—bottom) are presented in
Figure 3. The output of the LFW controller,
Iref(LFW), will be estimated based on power flow balance on DC bus (8):
where the capacitor
CDC filters the voltage on DC bus (
udc). The
, represent the output power of the boost converter, the power of Energy Storage System (ESS), respectively the power required from the FC system, on DC bus, via the boost converter:
The output power of the FC boost converter is:
where
ηboost ≅ 95% represents the efficiency of the boost converter.
Thus, the average value (AV) of the power flow balance (8) will be given by (11):
When the battery works in mode “
charge-sustaining”:
then LFW reference will be given by (13):
where the power requested on DC bus is the load demand from DC loads and AC loads via the inverter systems minus the available RES power:
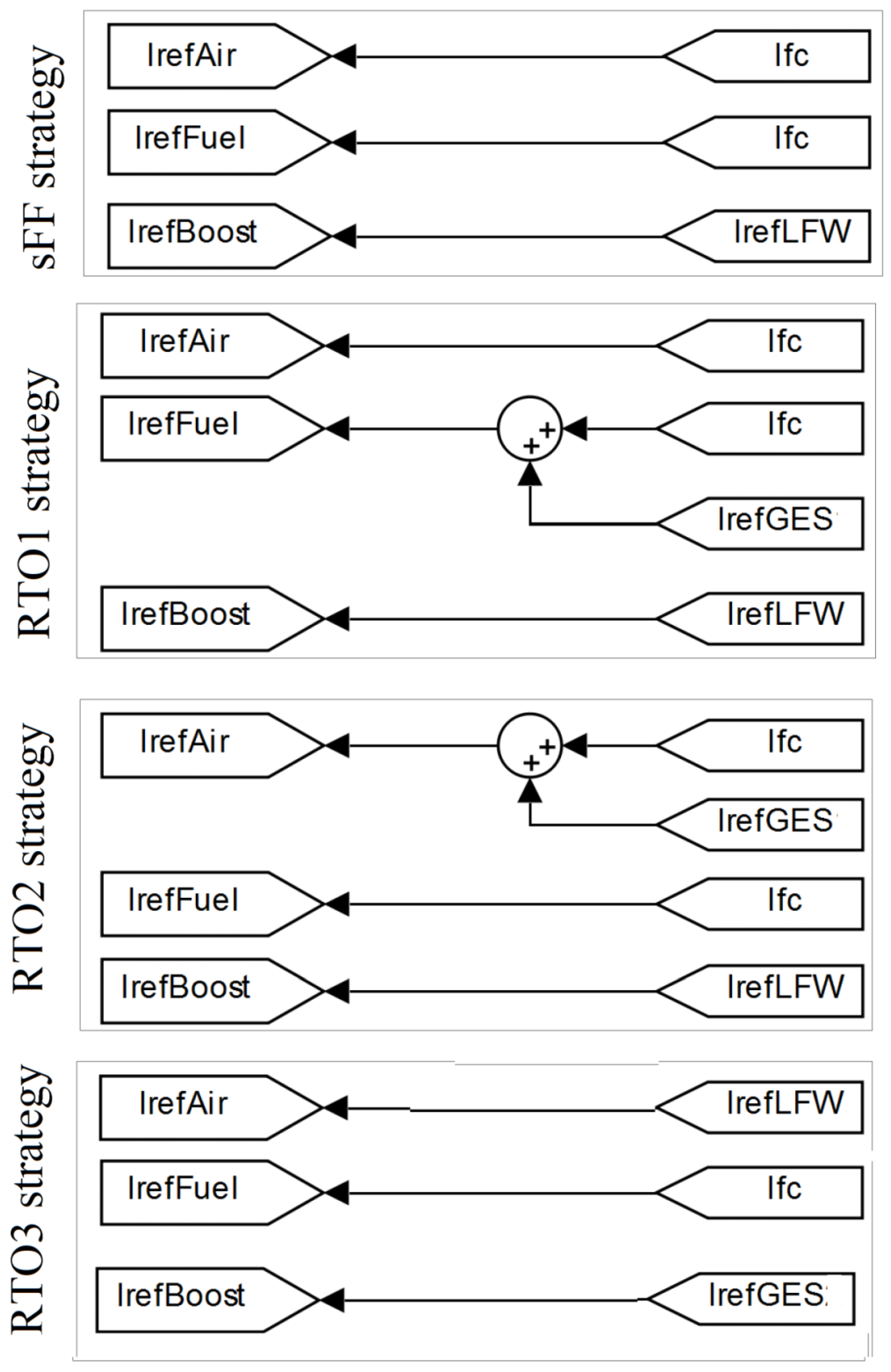
The inputs of the boost controller (
Iref(boost)), the air regulator (
Iref(Air)), and the fuel regulator (
Iref(Fuel)) will be controlled by the GES references based on RTO strategies setting (see
Figure 4 and
Table 1), as follows: the RTO1 strategy uses
Iref(boost) =
Iref(LFW).,
Iref(Fuel) =
IrefGES +
IFC and
Iref(Air) =
IFC, the RTO2 strategy uses
Iref(boost) =
Iref(LFW).,
Iref(Air) =
IrefGES2 +
IFC and
Iref(Fuel) =
IFC (both strategies being tested in [
97,
98] for the FC-HPS without support from the RES), and the RTO3 strategy uses
Iref(boost) =
IrefGES,
Iref(Fuel) =
IFC and
Iref(Air) =
Iref(LFW) (being tested in [
84,
99] for the FC-HPS without support from the RES).
The FC current will follow
Iref(LFW) for the RTO1 and RTO2 strategies due to hysteretic control of the boost converter:
Consequently, the FC net power generated will be given by (16):
Thus, considering (12),
PESS(AV) ≅ 0, the LFW control is implemented using (13). The smooth value of the load demand and the FC voltage can be obtained using the AV techniques or other filtering techniques as well [
100,
101]. So, a smooth value will be obtained for the reference
Iref(LFW) and the FC system will be safe operated even under sharp dynamic profiles of the load demand and RES power.
The references
Iref(Fuel) and
Iref(Air) will define the inputs
FuelFr and
AirFr of the FC system based on the fueling regulators (17) [
56]:
where
R and
F the constants 8.3145 J/(mol K) and 96485 As/mol, and the parameters (
NC,
θ,
Uf(H2),
Uf(O2),
Pf(H2),
Pf(O2),
xH2,
yO2 ) are defined in [
56].
The air and fuel regulators use 100 A/s slope limiters for safe operation of the FC-HPS [
102].
Note that due to LFW control of the FC system via the boost controller, the batteries will operate in charge sustaining mode for all RTO strategies analyzed in this paper. The advantages are related to battery size, its lifetime and maintenance cost, and simple implementation of the EMU (the constraints (3c) for the battery SOC are clearly respected).
The sFF strategy proposed in [
56] will be used as reference with the LFW control implemented in the same manner (see
Table 1) for a fair comparison of each strategy RTO
k,
k = 1 ÷ 7, based on the gaps (18) in the performance indicators:
A PEMFC Matlab Simulink model with parameters: 6 kW/45 V is used in this study. For this model, the constant time is put to 0.1 s value. The variable voltage of FC (VFC) is raised to 200 V by using a boost converter . The control type used for the boost converter is of hysteretic type with 0.1 A hysteresis band.
Similar to [
103], to mitigate the pulses on the DC bus a ESS semi-active topology is chosen. This topology has a battery stack connected on DC bus (lithium-ion batteries with 100 Ah/100 V) and an ultracapacitors’ stack with nominal capacity of 100 F. For this ultracapacitors’ stack we have the following typical values: ESR—the equivalent series resistor—the value is 0.1 Ω, EPR—the parallel resistor—the value is 10 kΩ, and the initial voltage are set on 100 V, so to connect the ultracapacitors’ stack to the DC bus, is used a bidirectional DC-DC converter. For all other model parameters, the values are the set by default. Also, the initial battery stack
SOC is 80%. Both stacks use models from Matlab and Simulink
® (R2013a, MathWorks, Natick, MA, USA) toolboxes (with the outputs that are offered by each model, such as
SOC signal for the battery’s model, and which all are explained in the help page). Furthermore, to filter the voltage on DC bus, a capacitor,
, with 100 μF is used (the initial value of
VDC = 200 V) [
103].
4. Results
The GES-based RTO strategies will search the optimum of the optimization function (3a) for three sets of the values (weighting coefficients): in the first situation, A, we have the following values for coefficients: knet = 0.5, kfuel = 0), for the second situation, B, we have the following values for coefficients: knet = 0.5, kfuel = 25, and for the third situation, C, the values for coefficients are: knet = 0.5, kfuel = 50. Different scenarios were performed in this analysis. These scenarios have taken into account the power flow over the DC bus: the load demand has been both, variable and constant, also having or not having the power of RES.
4.1. HPS under Constant Load Demand and kfuel = 0 and PRES = 0
The value of the performance indicators
ηsys0,
Fueleff0, and
FuelT0 for the sFF strategy are presented in [
71].
FC Electrical Efficiency
Results such as deficiencies in fuel economy, fuel efficiency, and global fuel efficiency are presented in
Table 2,
Table 3 and
Table 4 for each strategy RTO
k,
k = 1 ÷ 3, compared to sFF strategy in case A (
kfuel = 0) under constant load.
The fuel economy are presented in
Table 5,
Table 6 and
Table 7 for each strategy RTO
k,
k = 1 ÷ 3, compared to sFF strategy in case A (
kfuel = 0), B (
kfuel = 25), and C (
kfuel = 50) under constant load.
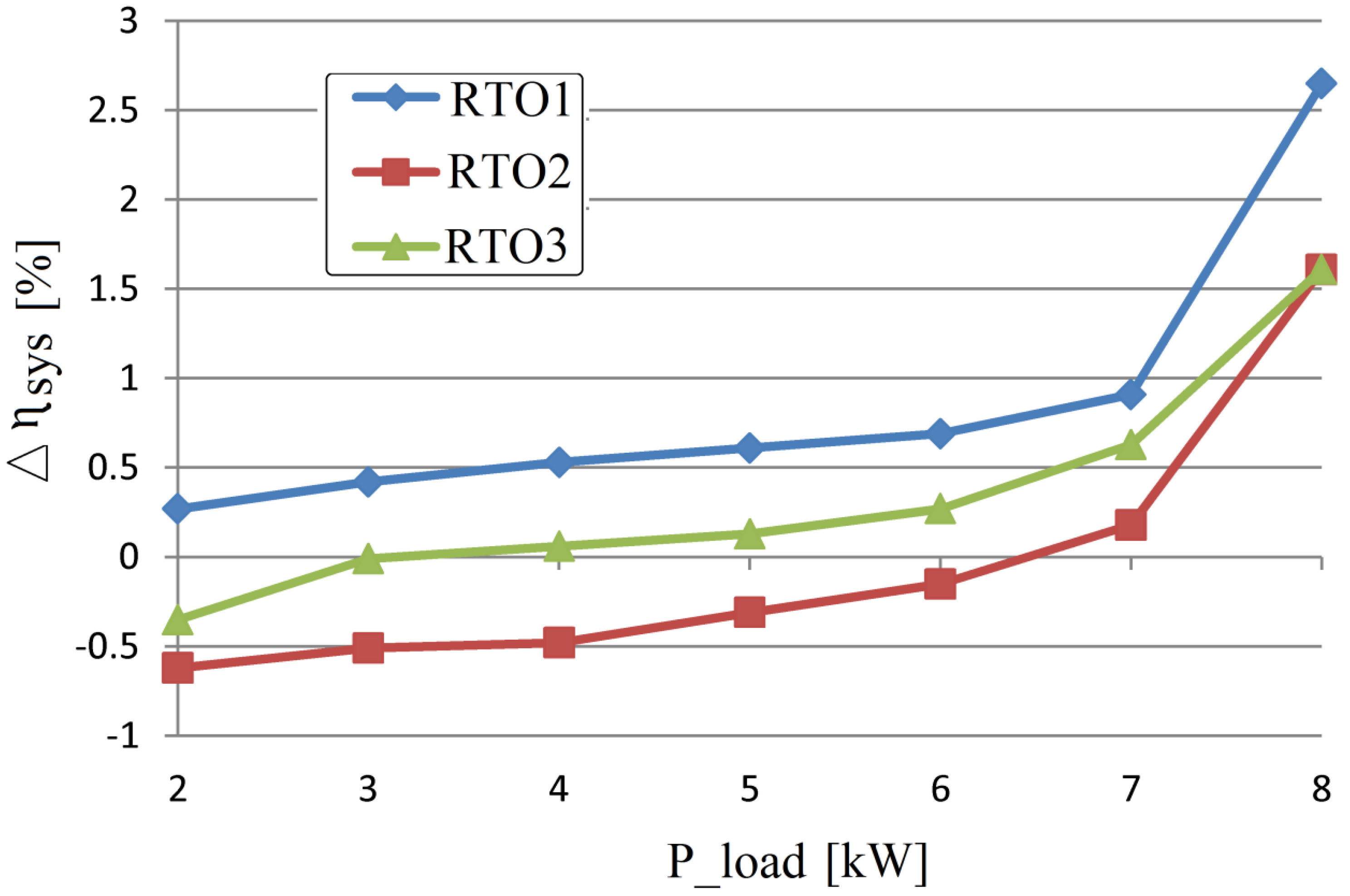
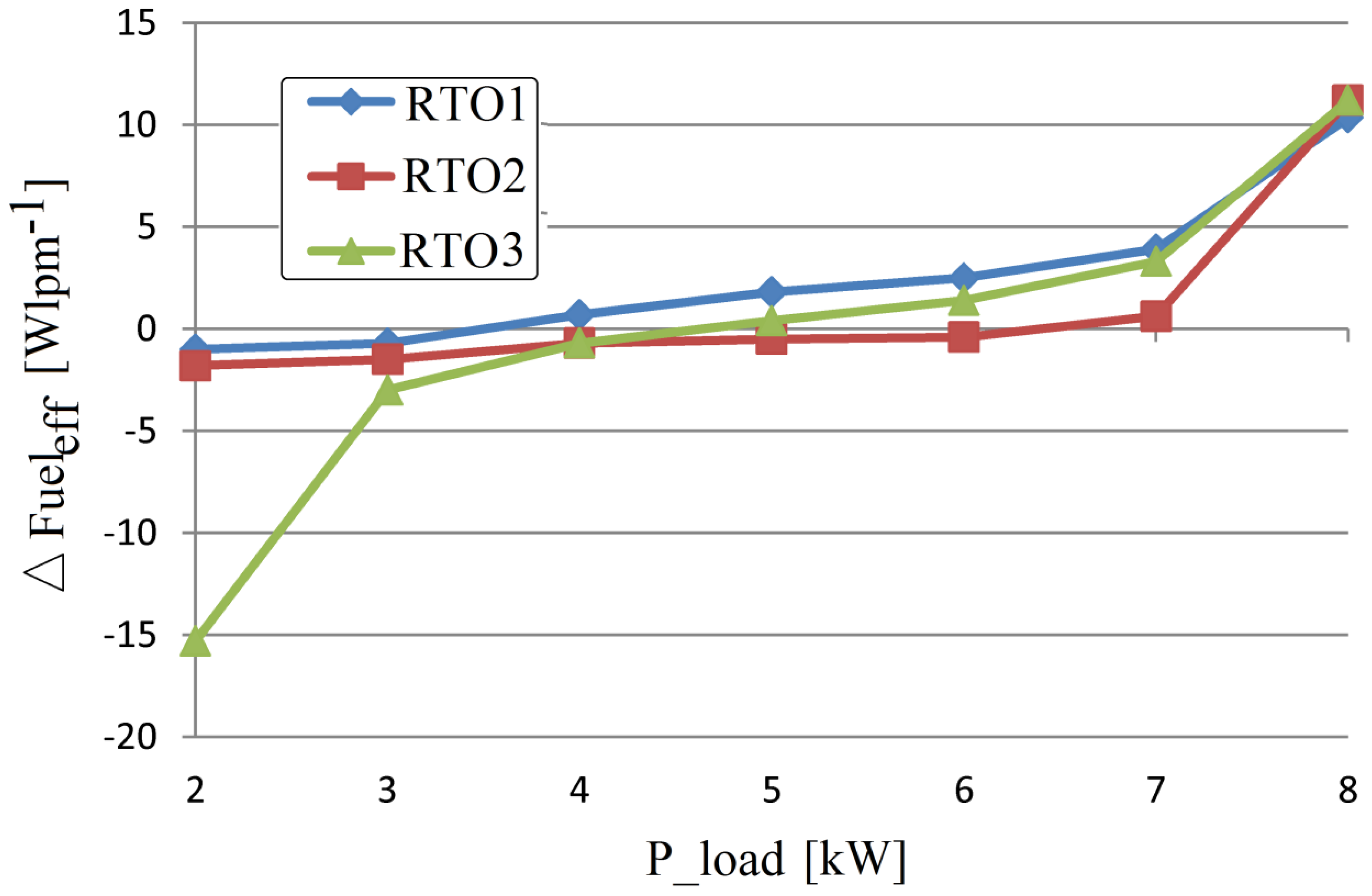
For the RTO1, RTO2 and RTO3 strategies, the deficiencies of the FC electrical efficiency and for the fuel efficiency are shown in
Figure 5 and
Figure 6. Fuel economy for the RTO1, RTO2, and RTO3 strategies in case A (
), B (
), and C (
) under constant load is shown in
Figure 7,
Figure 8 and
Figure 9.
The gaps in FC electric efficiency is positive in full range of the load demand for the RTO1 strategy and best compared to strategies RTO2 and RTO3 (see
Figure 5). Also, the fuel efficiency for RTO1 strategy is better compared to strategies RTO2 and RTO3 (see
Figure 6). Fuel economy for the strategies RTO1 and RTO2 has almost the same shapes of evolution with load demand. Almost the same values for light load, but different values for high load are obtained (see
Figure 7 and
Figure 8). So, the FC net power could be maximized if the FC vehicle ascends up a hill using any of the RTO strategies outlined in this paper. Also, remember that the best fuel economy result for case B (
), so the fuel economy could be maximized if the FC vehicle ascends up a hill by choosing the appropriate value for weighting parameter
kfuel. The performance of the RTO strategies outlined in this paper must be validated in different scenarios below.
4.2. Fuel Economy for the HPS under Variable Load Demand, PRES = 0, and Different kfuel
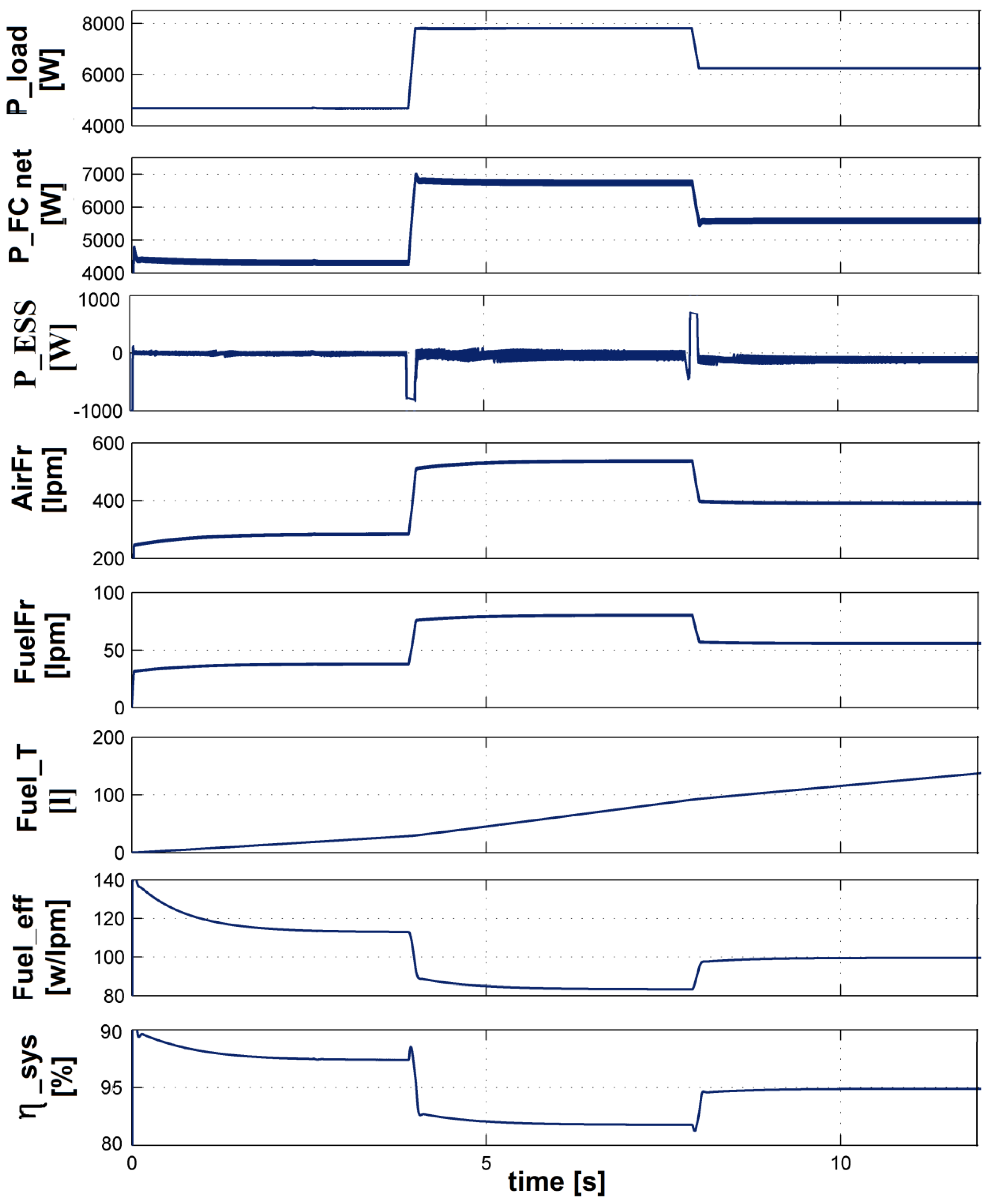
Only to exemplify that the LFW control of the boost converter operates based on (13), the behavior of the FC-HPS under 6.25 kW LC for the strategies RTO1 (
Iref(LFW) =
Iref(boost),
Iref(Fuel) =
IrefGES2 +
IFC and
Iref(Air) =
IFC) with
kfuel = 25 is presented in
Figure 10.
The load cycles of 6.25 kW average power (
Pload(AV) = 6.25 kW) is presented in first plot of
Figure 10, but other load cycles that are used in this study as well, with different
Pload(AV) values mentioned in
Table 8, are defined in [
71]. The fuel economy
for the sFF strategy is presented as reference in
Table 8.
The structure of the
Figure 10 is as follows: the first plot shows the variable profile of the load power (
PLoad); the second plot shows the generated FC net power profile (
PFCnet) and this follows the load demand, highlighting that the LFW control operates properly; the third plot shows the ESS power, highlighting the advantage of LFW control implementing: the battery operating mode will only be of the charge-sustaining type (
), the DC bus power flow balance being sustained only during sharp variation of the load demand; the next two plots show the fueling flow rates (
AirFr and
FuelFr); the last three plots show the fuel consumption (
FuelT), the fuel efficiency (
ΔFueleff), and the FC electric efficiency (
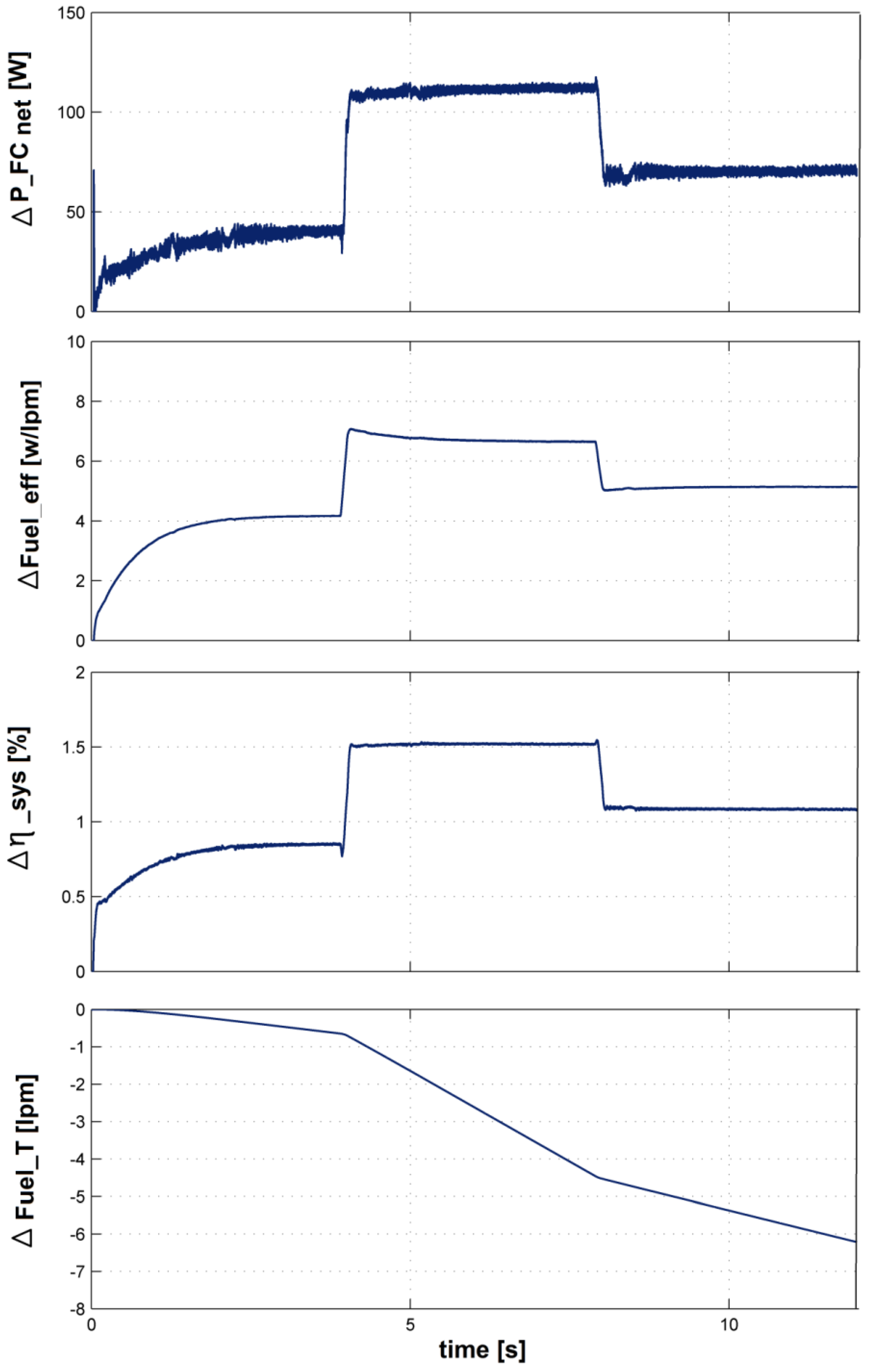
ηsys). It is worth to mention that the shape of the signals for the strategies RTO1, RTO2, and RTO3 will look almost the same, but small differences in performance indicators can be observed for different LCs (which are mentioned in
Table 9 for each RTO strategy). For example, the differences in FC net power (
ΔPFCnet =
PFCnetk −
PFCnet0,
k = 1, 2, 3), FC energy efficiency (
Δηsys =
ηsysk −
ηsys0), fuel efficiency (
ΔFueleff −
Fueleffk −
Fueleff0), and fuel economy (
ΔFuelT −
FuelTk −
FuelT0) are represented in
Figure 11 for RTO1 strategy with
kfuel = 25 (the value where the best fuel economy was obtained for constant load).
The fuel economy for strategies RTO1 is of 6.36 liters (see also
Table 10) and this performance indicator will be used to compare selected RTO strategies under variable load. The fuel economy is presented in
Table 9,
Table 10 and
Table 11 for selected RTO strategies compared to sFF strategy.
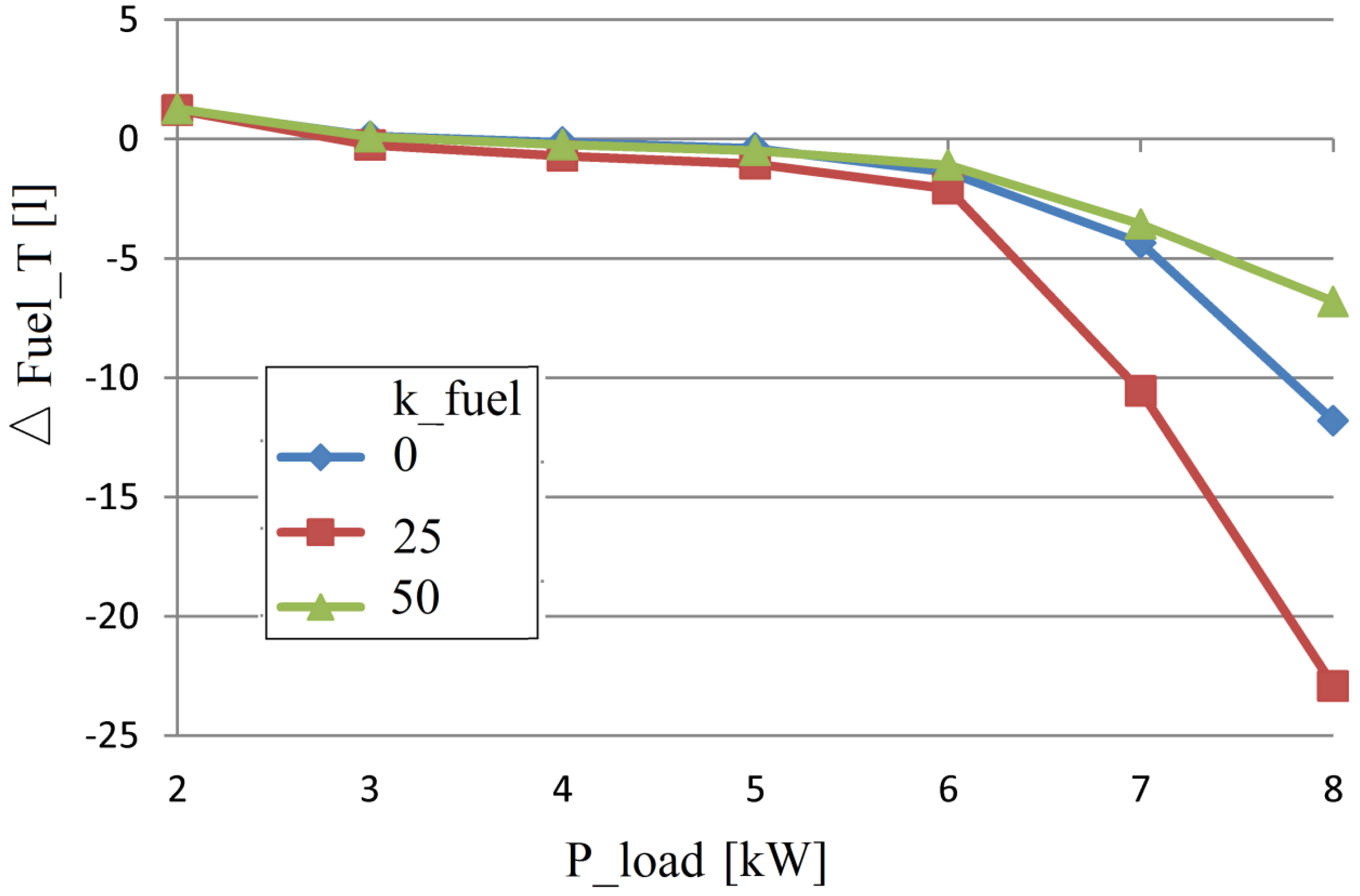
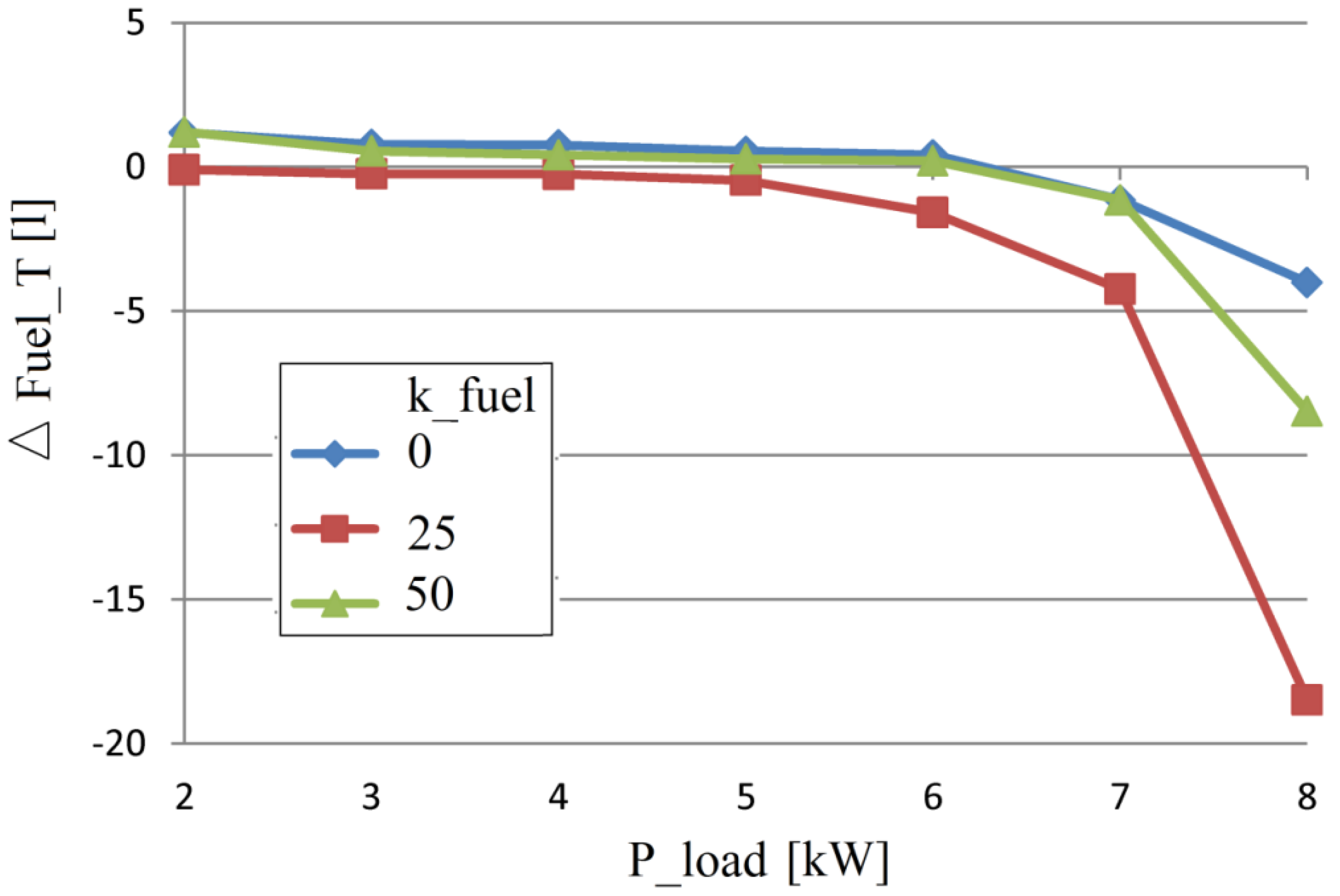
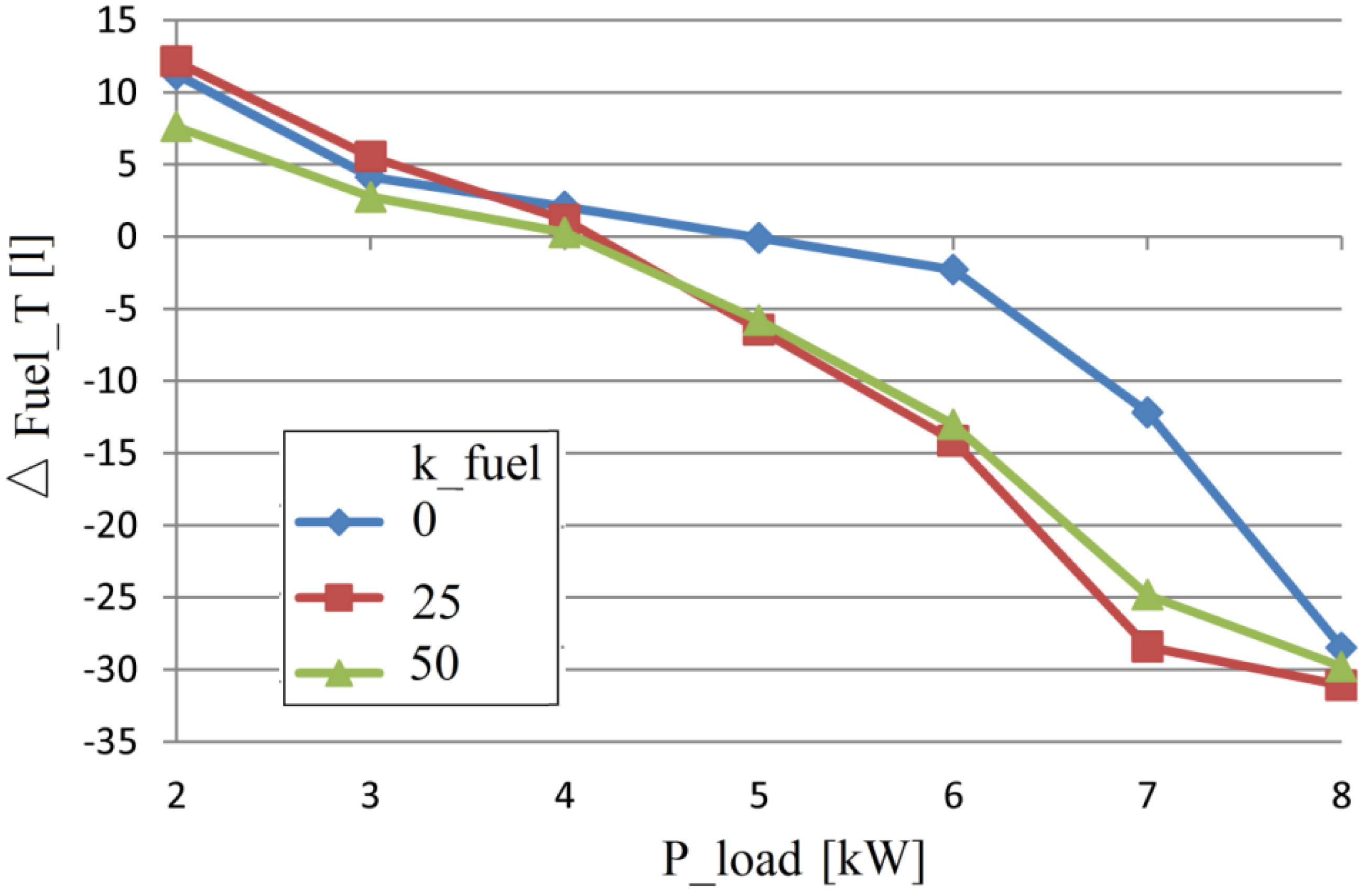
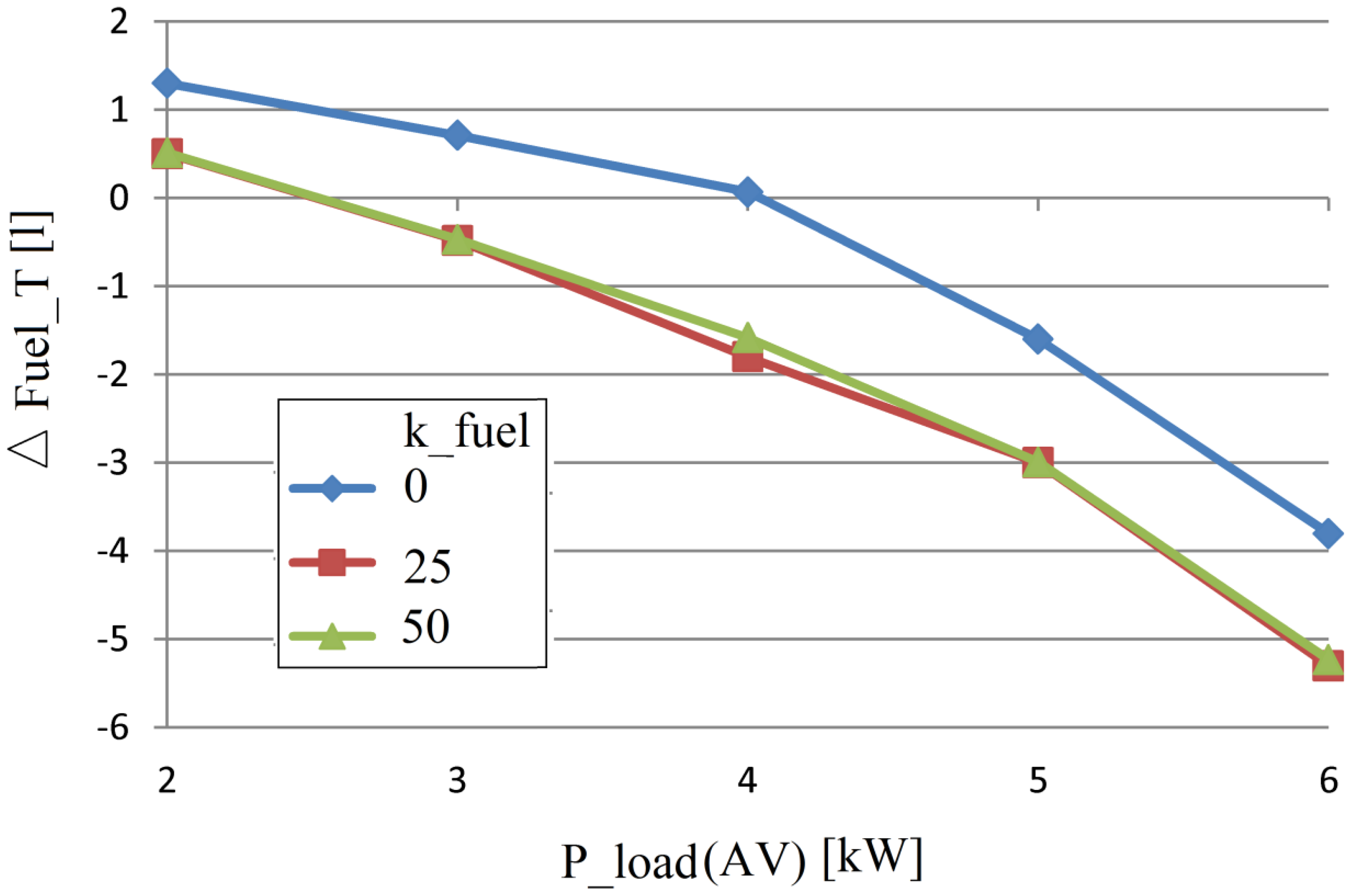
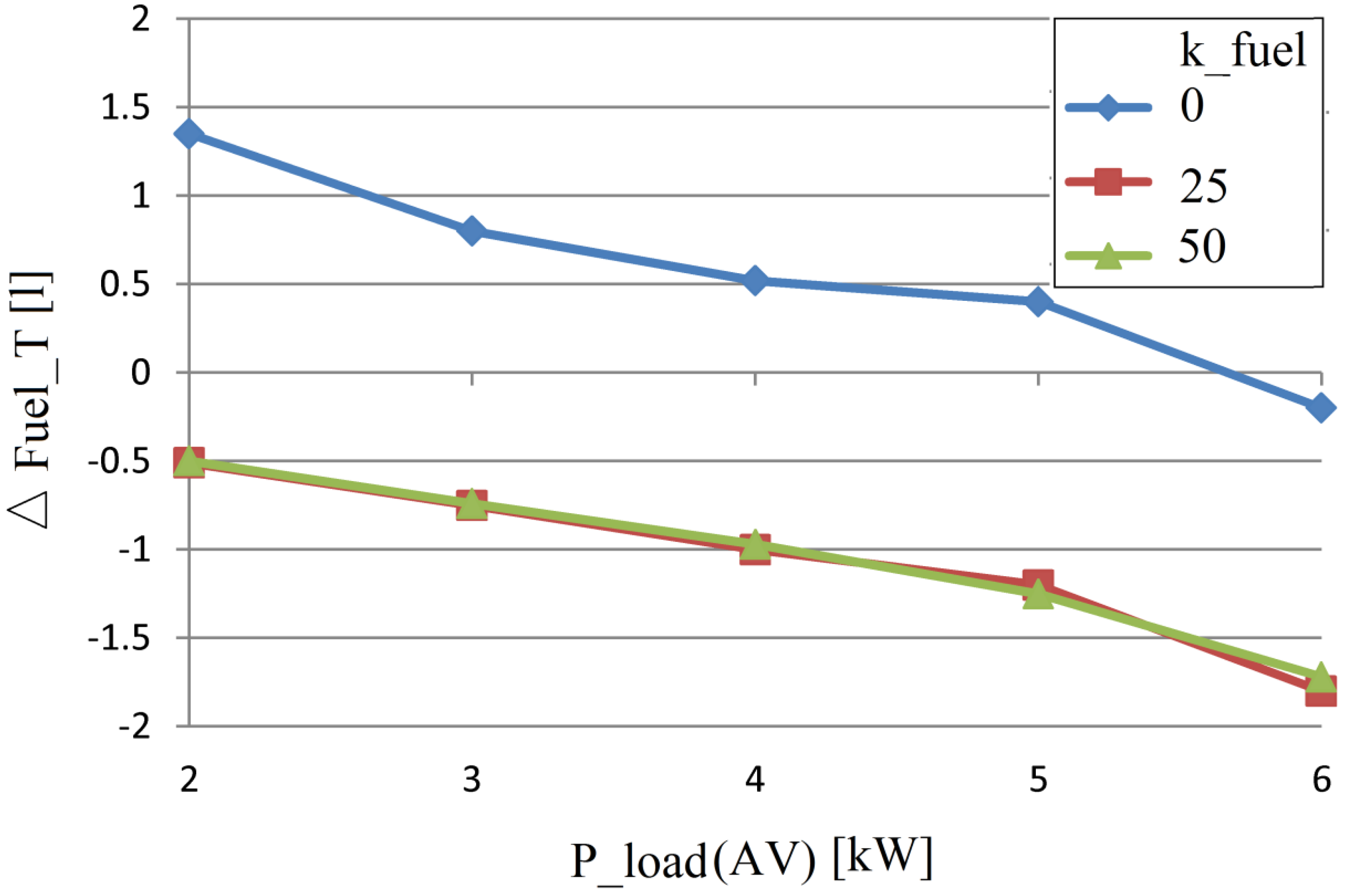
The fuel economy for selected RTO strategy, in the all situation, A (
,
), B ((
,
), and C ((
,
), under variable load demand is shown in
Figure 12,
Figure 13 and
Figure 14.
Note that the values for the fuel economy increases for some strategies, RTO1 and RTO2, only if kfuel ≠ 0. A sensitivity analysis was performed considering the parameter with values between 10 and 50, for understand the shape of the optimization function in this variable .
The results show that the optimization function is multimodal, with parameter
kfuel, so any value for
, between 10 and 50, can be used and the same fuel economy can be obtained for two different values of
. It is worth mentioning that any value of
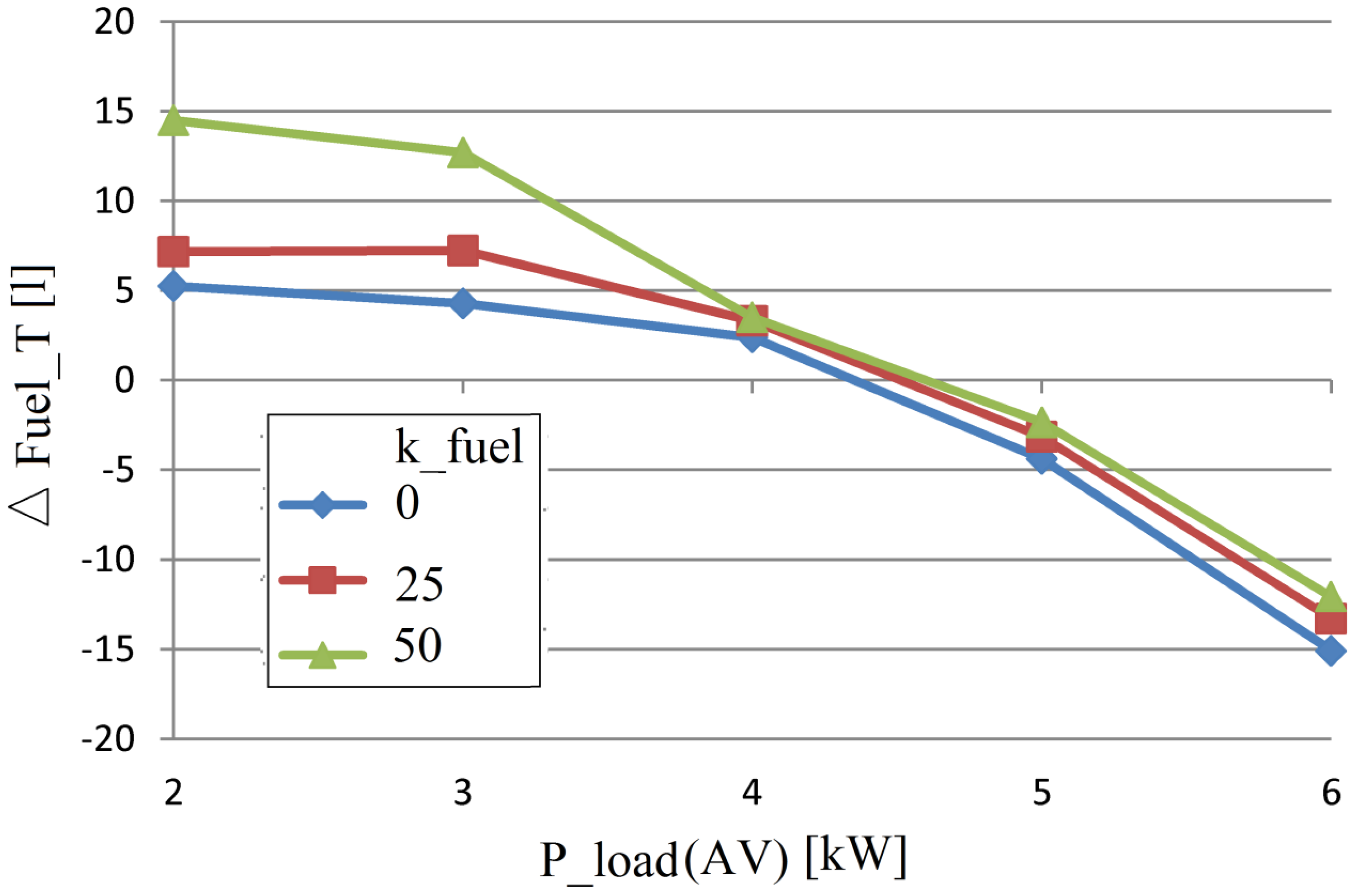
in the range of values between 10 and 50 will improves the fuel economy for the strategies RTO1, in almost the full range of load demand and this is higher than that obtained with the RTO3 strategy, but no improvement in fuel economy at light load is obtained for RTO3 strategy if
kfuel ≠ 0. Also, it worth to mention the the fuel economy is almost the same for
kfuel = 0 or
kfuel ≠ 0 compared to sFF strategy for
(as it can be observed at constant load as well; see
Figure 9), but clearly higher than that obtained with the booth strategies RTO1 respectively RTO2.
Consequently, the rules of the RTO switching strategy for best fuel economy of 6 kW FC-HPS could be defined as follows: (i) set the weighting coefficient kfuel to optimum value (around of 25); (ii) if the load demand is lower than 5 kW then the recommended strategy must be the RTO1 strategy; (iii) if the load demand is higher than 5 kW then the recommended strategy must be the RTO3 strategy.
4.3. Fuel Economy for the HPS under Variable Load Demand and PRES ≠ 0
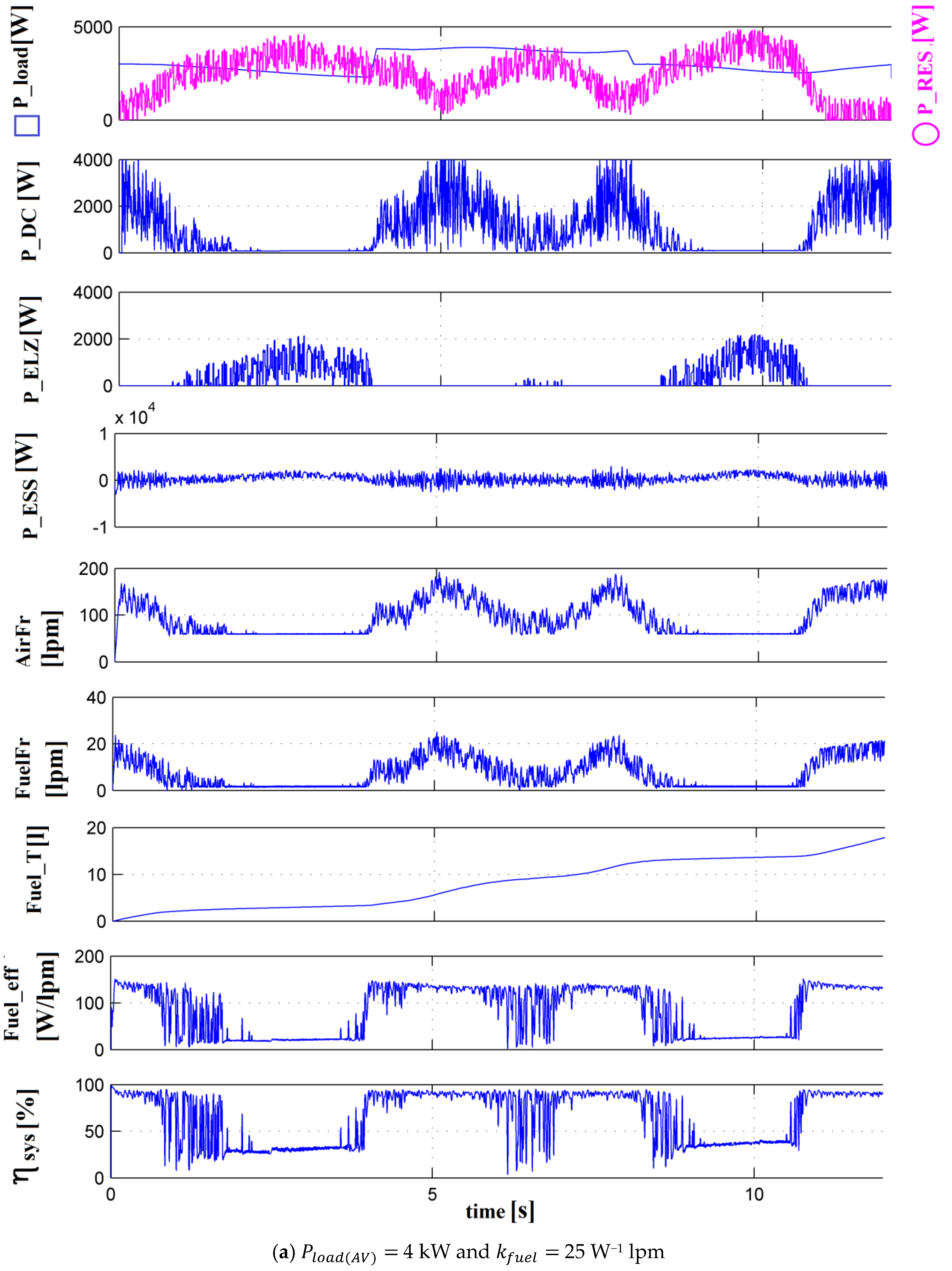
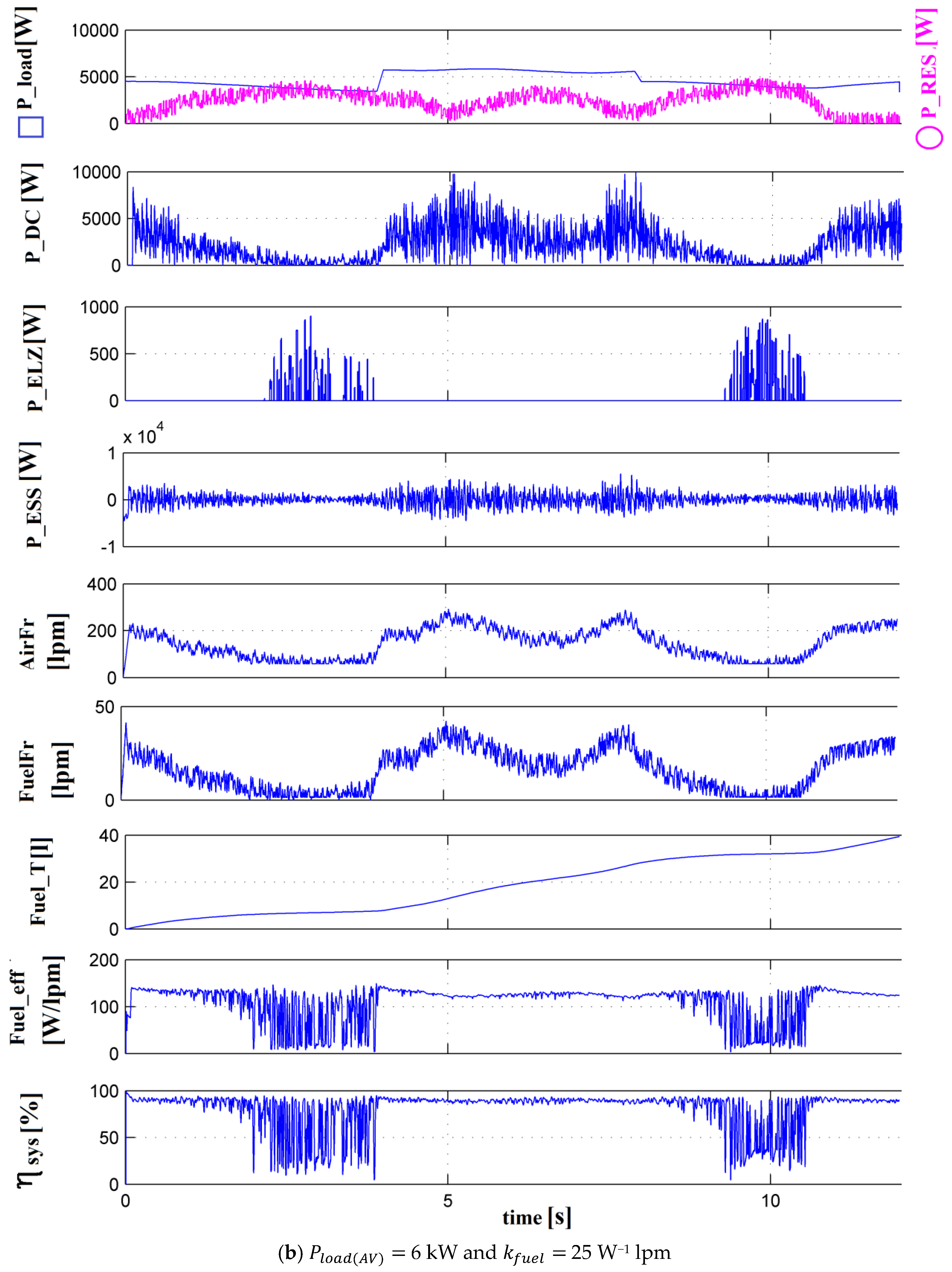
For exemplify, in
Figure 15 is presented the functioning for the RTO3-based FC-HPS under variable load and RES power for two AV levels of the load demand (
= 4 kW and
= 6 kW in
Figure 15a,b). The plots’ organization presented in
Figure 15 is: the first plot shows the profile of the load power. The second plot shows the FC net power profile. This FC net power follows the load demand due to the implemented LF control. The third plot shows the Energy Storage System power, highlighting the LF control advantage: the ESS operate in the charge sustaining manner (
); the fueling flow rates (
AirFr and
FuelFr) are presented in the next two plots, and, in the last three plots, the fuel consumption, the fuel efficiency, and the FC energy efficiency are presented.
If the RES power is higher than the load demand (), the fuel cell operate in standby mode, at low power. This is done by limiting fueling flows, avoiding a more complicated star-stop procedure.
The resulting power excess, () must be used (one use it to supply an electrolyzer). If this power excess is not used, it is necessary to monitor the charging state of the battery, in order to avoid full charging.
5. Discussion
Differently from the sFF strategy, to explain the fuel economy obtained with the GTO-based RTO strategy, it is necessary follow the values of the performance indicators mentioned above and the values for the adjustment parameters and the gains. Taking into account design rules from [
75], tuning parameters
, respectively
, were designed for fuel cell system with 6 kW power.
Normalization gains must to accommodate the booth values:
yN respectively
p for the full range of searching. In this case, the following values were used in the simulation:
and
. The following values for weighting coefficients
lmp, respectively
lpm were chosen to give an approximately identical contribution to FC net power
, and for the fuel consumption efficiency
into the optimization function
. The load demand varies in range of 2 kW to 8 kW and the FC current from 10 A to 240 A. Thus, considering these values, the optimization function varies from about 4400 to 6400. Thus, the signal
varies from 1.5
to 2.1
and the signal
p from
to 4
. The adaptive characteristic of the GES control has 100% ability to discover the global optimum for these variations in the parameters [
76,
96].
Since the imposed objective is to improve the fuel cell net power, and not to save the fuel (the form of optimization function is ), we will get more fuel economy by using the sFF strategy, in comparison with RTO strategies if and the load is lower .
If the Pload < 3 kW, the results obtained are very little different when performing a sensitivity analysis in according with: . This is possible because we have low values for search resolution (RS), which become lower than 0.5% and hit count decreases (so a suboptimal value was found instead of the optimum).
Except for the RTO3’s strategy al light load (Pload(AV) < 4 kW for kfuel ≠ 0), in all other cases, we achieve fuel economy, both for constant load and for variable load. The exception occurs when RS < 0.5% at light load, but note, compared to strategies RTO1 and RTO2, the high fuel economy of RTO3 strategy that is obtained for Pload(AV) > 4 kW due to optimal control of the boost converter.
The multimodal characteristic of the optimization function in variable kfuel resulted after the sensitivity analysis performed for different kfuel values, in the 10–50 range. In this way, for any kfuel value in the above mentioned range, the fuel economy can be improved.
Several factors influence tracking efficiency. These factors are: the dynamics of the load; the RES power profile; and last but not least, the tracking time (the response time of the search loop) [
25,
26,
27,
28,
29].
As was mentioned, if we have a 100 Hz sinusoidal dither, 10 periods of dither (0.1 s) represent the tracking time for the GES control. Consequently, the dynamic phenomena such as the RES power fluctuation and high and sharp dynamics of load demand will influence the performance of any RTO strategy (including the sFF strategy) if the tracking time is not lower that time constants of the process under optimization. For the stationary tracking accuracy parameter, the following results are obtained: for stationary mode, and for the dither frequencies ranging from 10 Hz to 1000 Hz, we have an accuracy of 99.99%. If we have load pulses mode, and we have 100 Hz for the dither frequency, we obtain a tracking accuracy of 99.86%. This accuracy decreases to 98% if the dither frequency is 1000 Hz [
78]. Taking into account the sensitivity analysis performed for the dither signal frequency in the interval between 10 Hz and 1000 Hz, the best results appear when we use a sinusoidal dither signal with a hundred Hz frequency.
For a fair comparison, the LFW reference Iref(LFW) was used as reference input for the boost controller (Iref(boost)) in the strategies RTO1 and RTO2, and for air regulator in RTO3 strategy. The inputs of the air regulator (Iref(Air)) and the fuel regulator (Iref(Fuel)) in the strategies RTO1 and RTO2 were controlled by the GES reference (IrefGES) and the FC current (IFC) to optimize the FC system operation as follows: the RTO1 strategy uses Iref(Fuel) = IrefGES + IFC and Iref(Air) = IFC, and the RTO2 strategy uses Iref(Air) = IrefGES + IFC and Iref(Fuel) = IFC. The RTO3 strategy uses Iref(boost) = IrefGES, Iref(Air) = Iref(LFW), sand Iref(Fuel) = IFC. Thus, the RTO3 strategy uses the boost convertor to optimize the FC system operation, which has response time much shorter than the fueling regulators and speed advantage in searching the optimum of the optimization function compared to strategies RTO1 and RTO2. Consequently, for best fuel economy, the potential rules of an advanced RTO switching can be defined as follows: (i) set the weighting coefficient kfuel ≠ 0 (in range 10 to 50); (ii) if the load demand is lower than 5 kW then the recommended strategy must be the RTO1 strategy; (iii) if the load demand is higher than 5 kW then the recommended strategy must be the RTO3 strategy.
The next work will be focused on a comparative analysis of the fuel economy obtained by using the RTO strategies proposed in this paper with those analyzed in [
71].
6. Conclusions
In this paper, besides a brief presentation of current RTO strategies and a critical assessment of proposed Extremum Seeking (ES) algorithms, the fuel economy of three Renewable Fuel Cell Hybrid Power System (REW/FC-HPS) topologies has been analyzed.
In this paper, the dynamics on load demand and the electric power available from the Renewable Energy Sources (RESs), is proposed to be mitigated using the load-following (LFW) control in order to sustain the power flow balance on the DC bus within much power support from the battery. Because, in this case, the battery will work in charge-sustained mode, resulting clear advantages for FC vehicles related to battery size, its lifetime and maintenance cost.
The optimization objective can be set in real-time by changing the values of the weighting coefficients and in order to increase the overall fuel economy, the FC electrical efficiency, or other performance indicators defined for the HPS.
So, besides the proposal of the switching RTO strategy, the main results of this study can be summed up as follows:
In comparison with sFF strategy, the control strategies RTO1 and RTO2 offers a higher FC electric efficiency for all range of the load demand (see
Figure 5).
The fuel efficiency of the strategies RTO1 and RTO3 is almost the same for
Pload(AV) > 4 kW (see
Figure 6).
The fuel economy of all RTO strategies analyzed here for
kfuel= 0 is almost the same for
Pload(AV) < 4 kW, but a three times higher fuel economy is achieved at maximum load considering the RTO3 strategy compared to RTO1 strategy (see
Figure 7,
Figure 8 and
Figure 9 for
kfuel = 0).
The conclusions about fuel economy for each RTO strategy remain the same for variable profiles of the load demand and RES power.
The variability of the RES power and load dynamics can be mitigated by the LFW proposed in this paper to sustain the power flow balance on the DC bus without much support from the batteries’ stack, which mainly operates in charge-sustained mode.
Finally, it worth to mention that exploration of space of the optimal solutions with two variables could have as result a higher fuel economy compared with one variable—based RTO strategies analyzed in this paper, but this assumption must further investigated.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}