Speed Synchronous Control of Multiple Permanent Magnet Synchronous Motors Based on an Improved Cross-Coupling Structure




Abstract
:1. Introduction
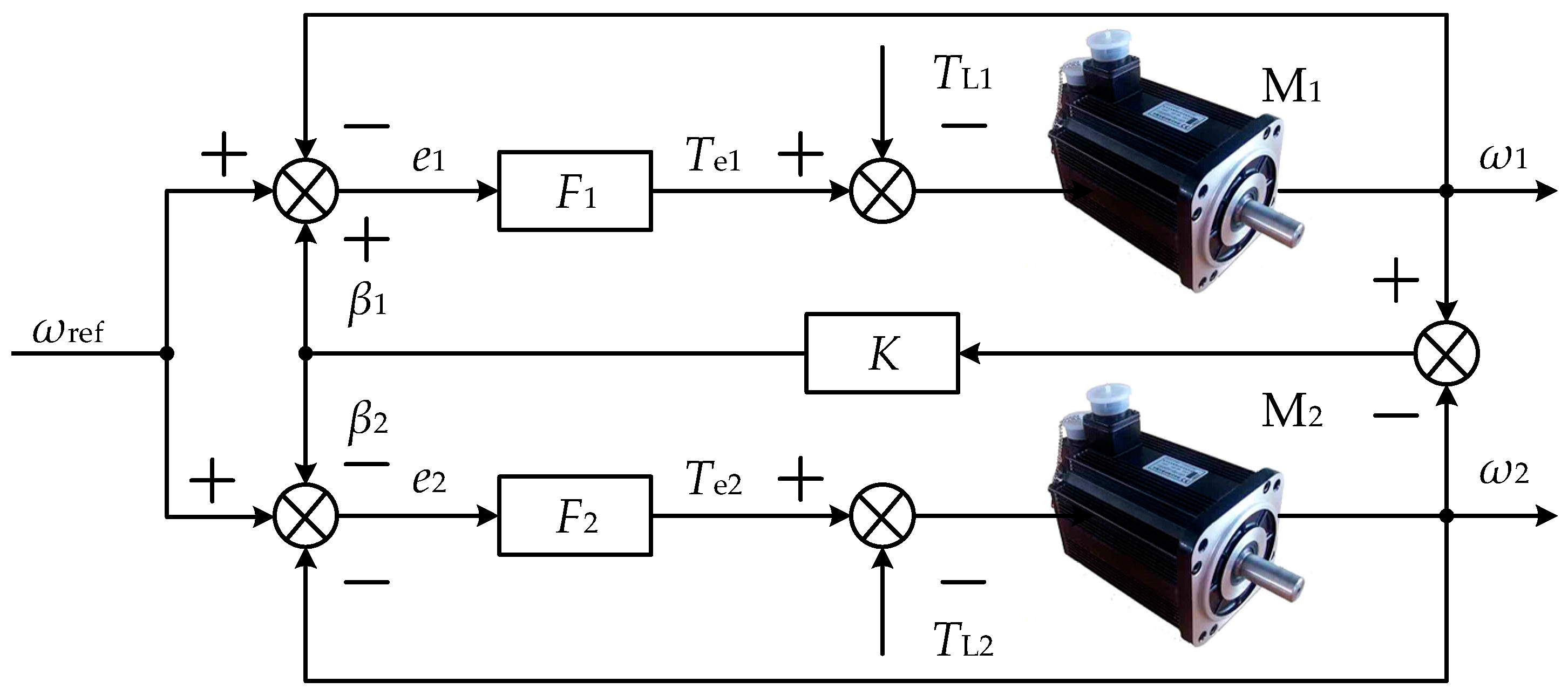
2. Traditional Cross-Coupling Control
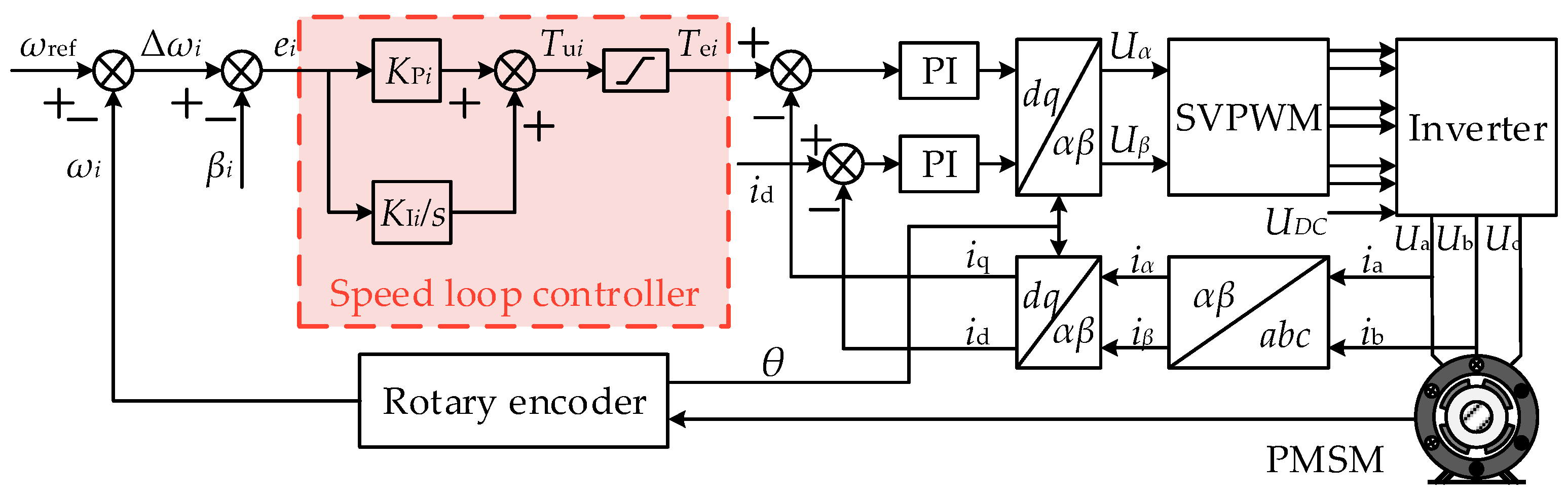
- In Figure 2, the tracking error Δωi is much larger than the compensation value βi, according to Equation (3), and ei is very large during the start-up of a multi-motor with load, thus making the amplitude-unlimited output of electromagnetic torque Tui much larger than the saturation value. However, the output of the speed loop controller generally contains a limiting part because of the system’s safety requirements. The output Tei of the speed loop controller will be saturated for a period of time, during which the compensation value does not work, eventually leading to a larger synchronization error.
- When the speed fluctuation of the system is large, the fixed gain compensation can’t be adjusted according to the disturbance of each motor in real time; this results in a longer adjusting time.
3. Fuzzy Self-Adjusting Cross-Coupling Control
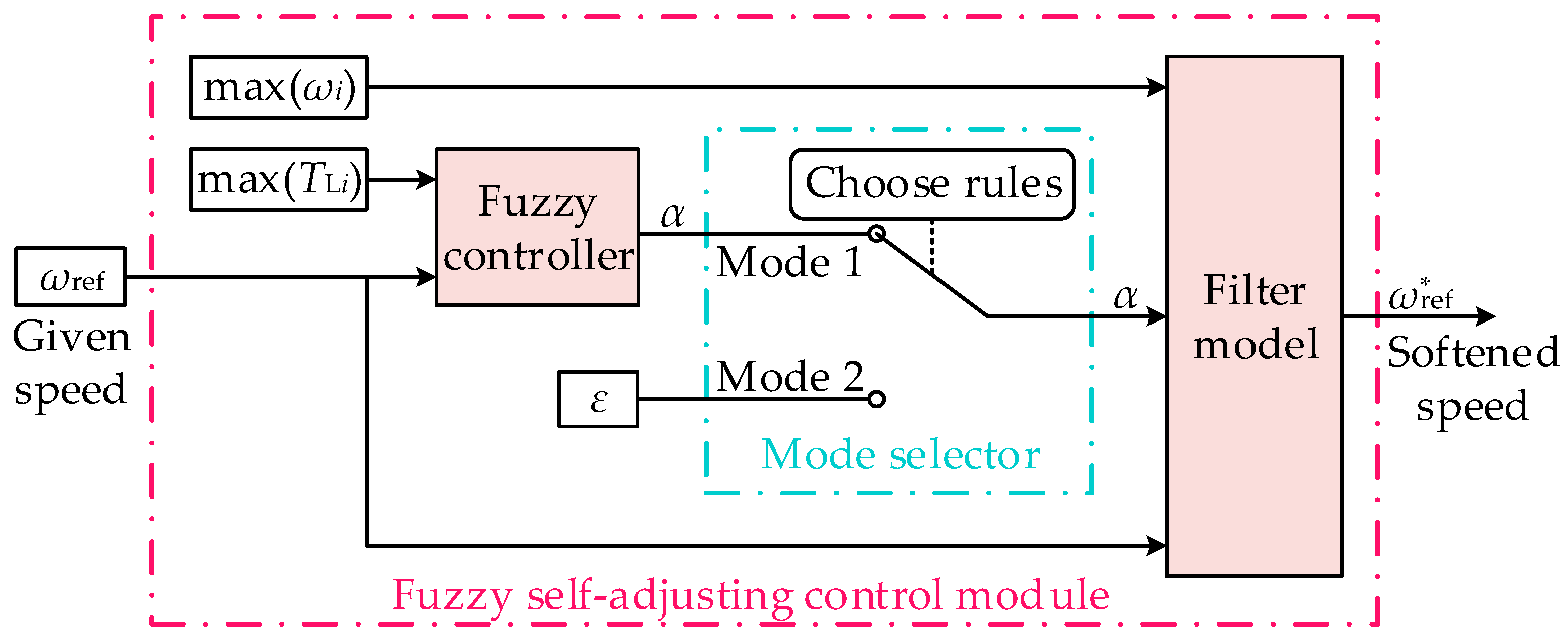
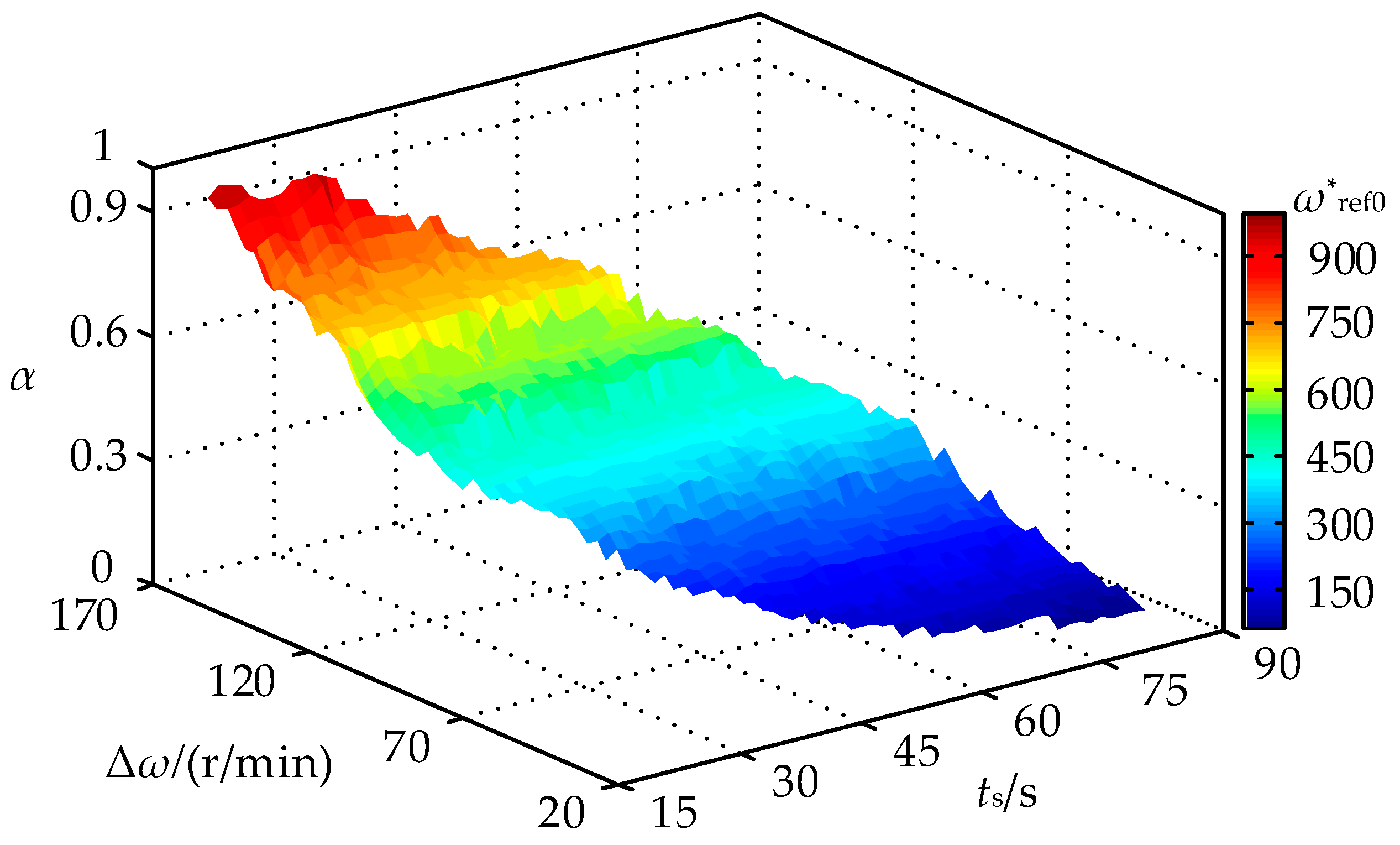
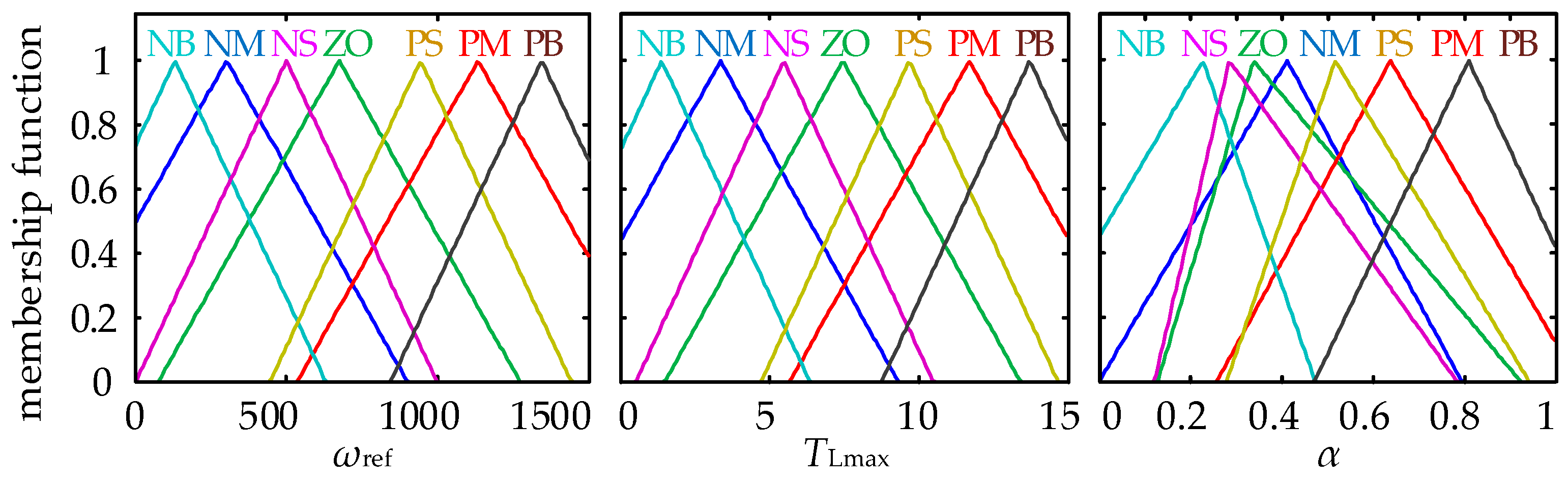
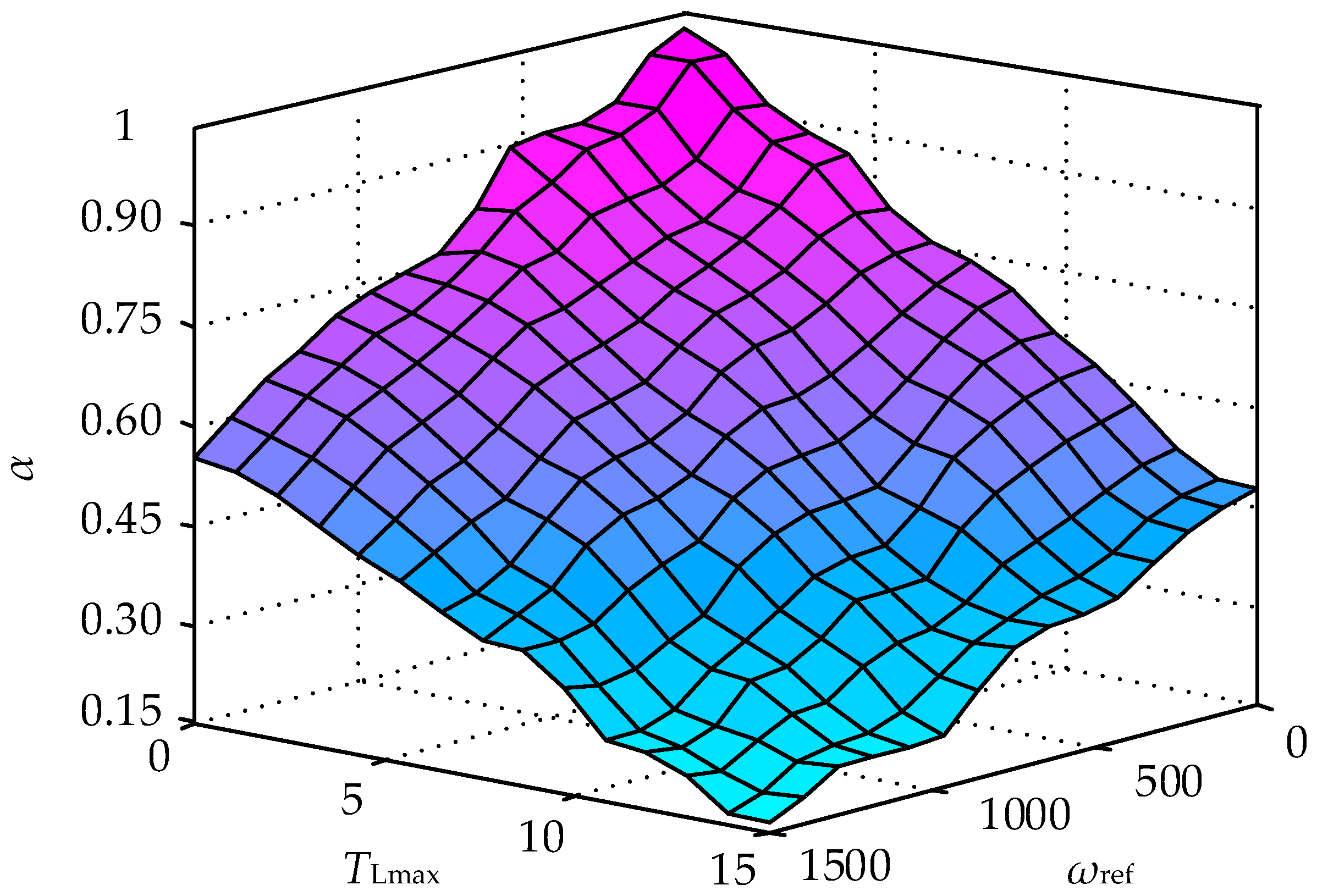
3.1. Fuzzy Self-Adjusting Control Module
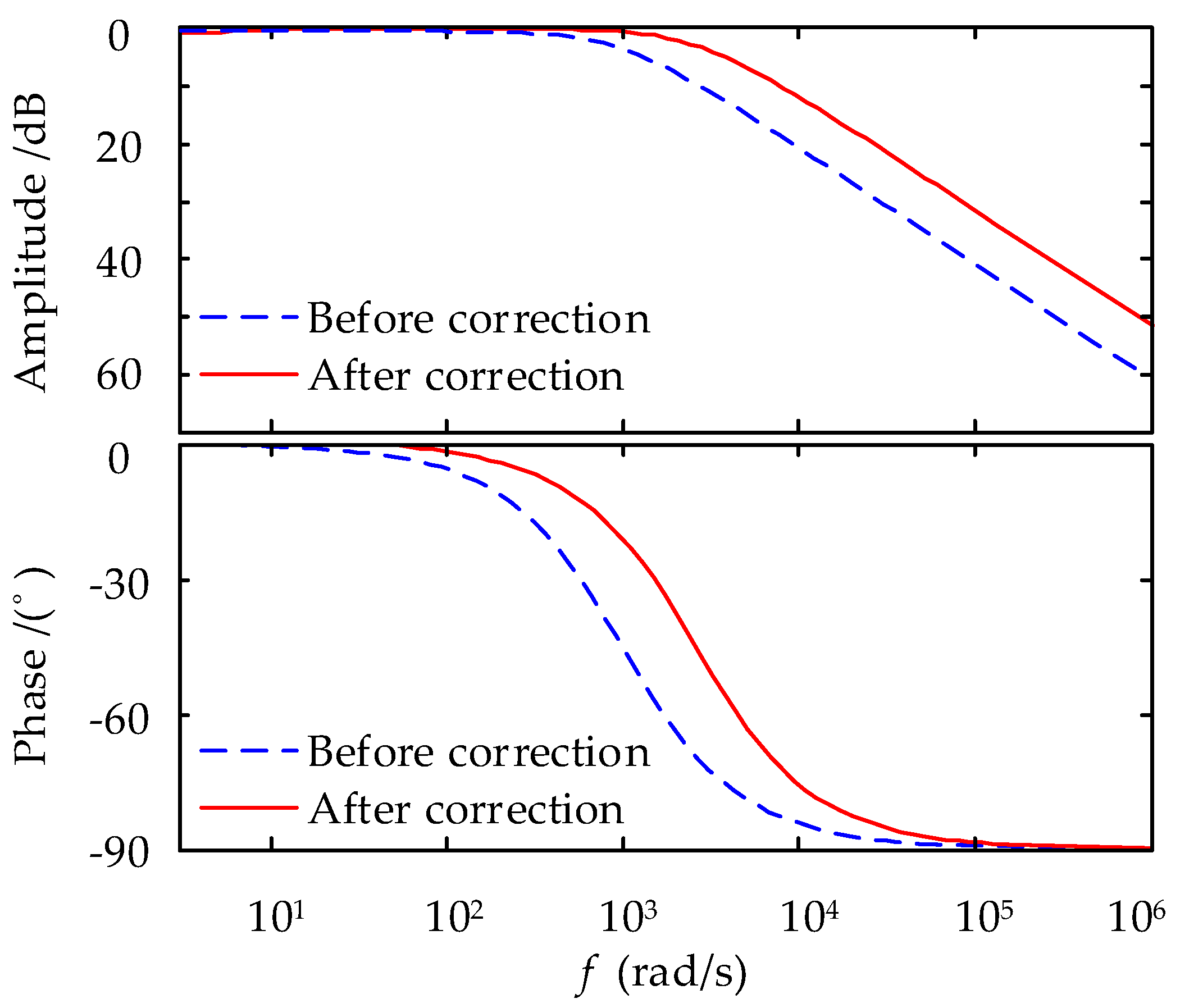
3.2. The Advanced Synchronization Compensator
4. Performance Analysis of Fuzzy Self-adjusting Cross-Coupling Control
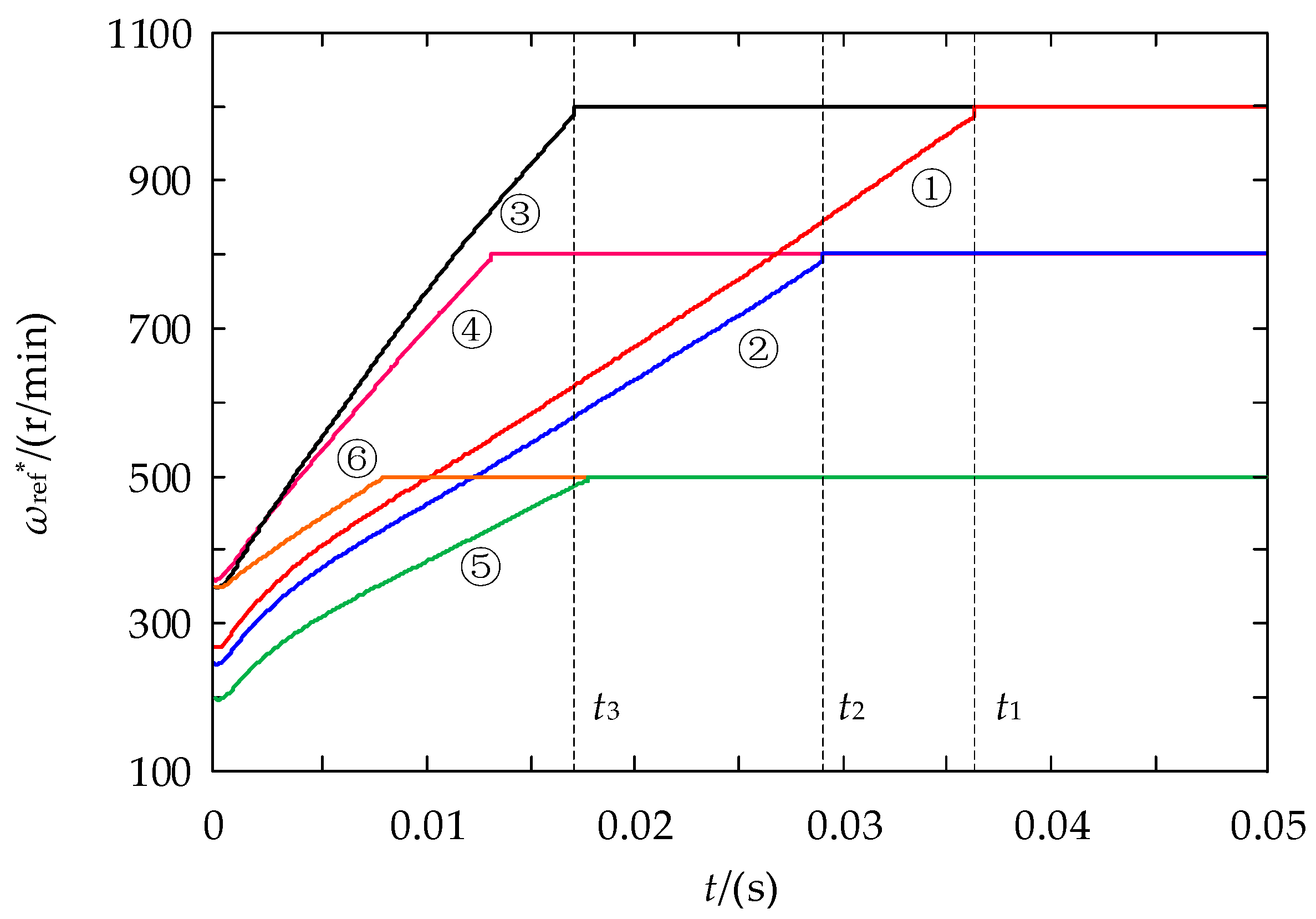
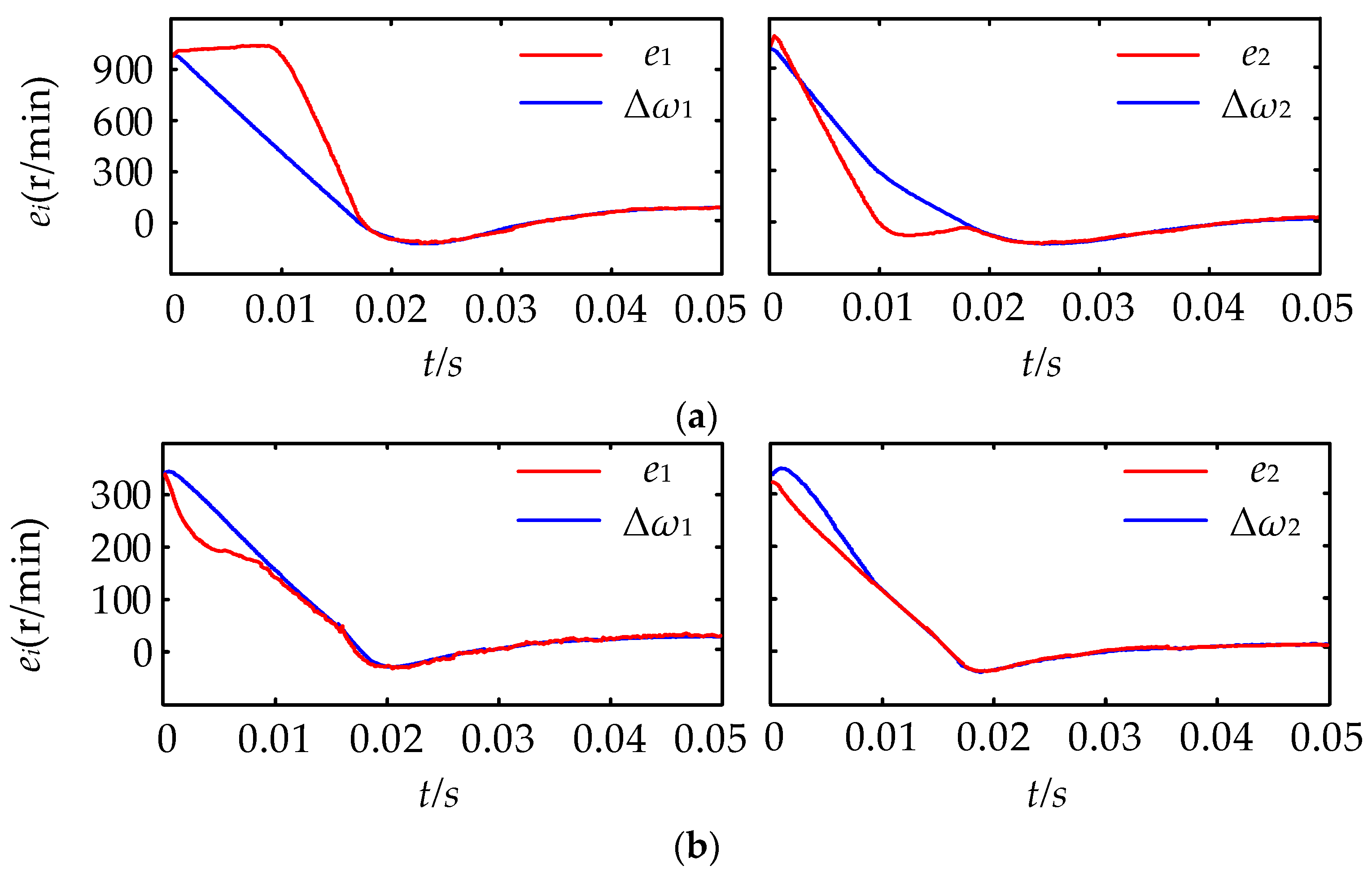
4.1. Synchronization Performance Analysis during the Start-Up of Motors with Load
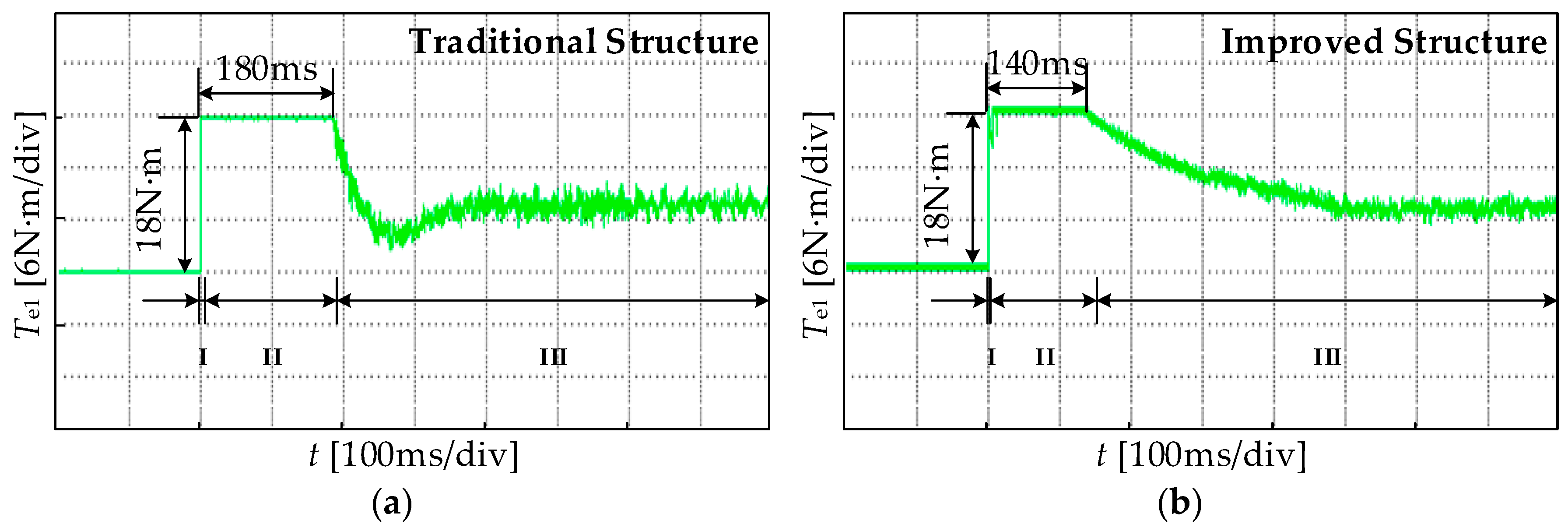
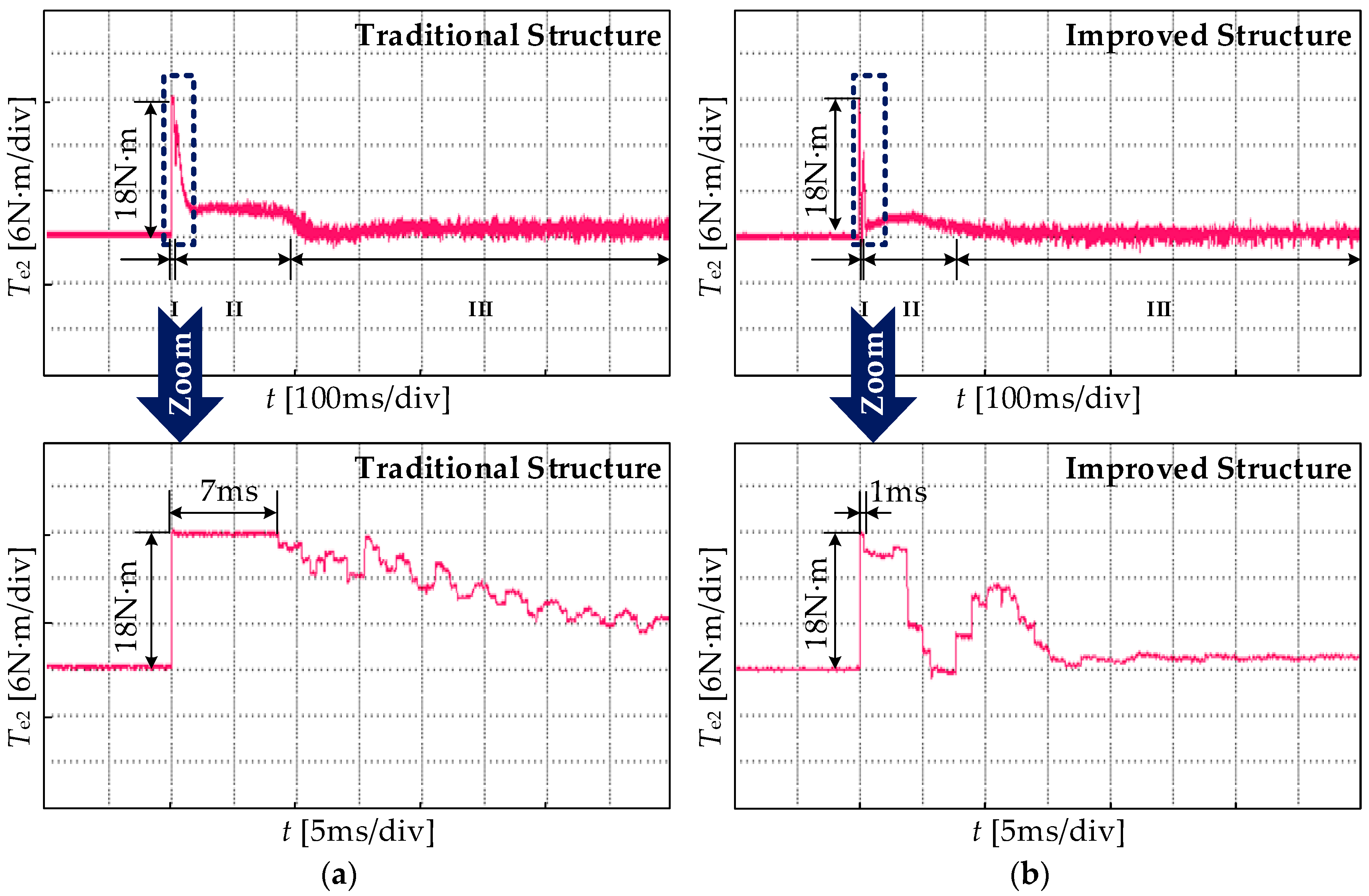
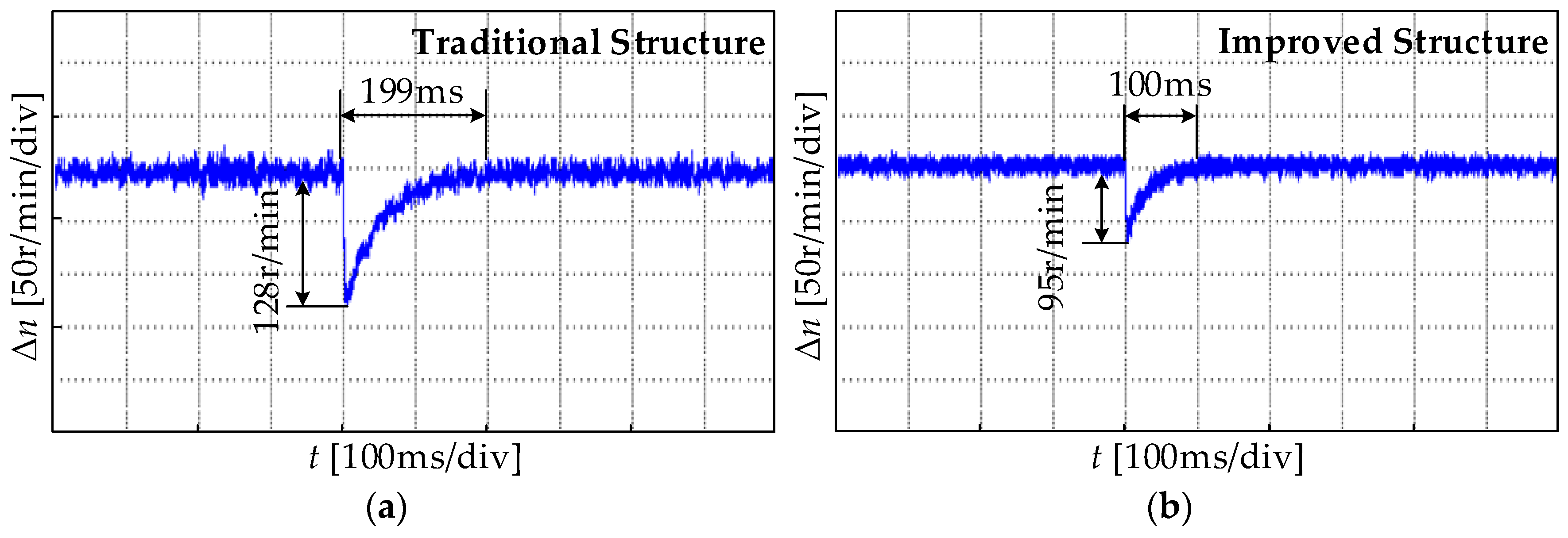
4.2. Synchronization Performance Analysis of Steady State with Sudden Changes of Load
5. Experiments and Analysis
5.1. Experimental System and Parameter Selection
5.2. Performance Comparison of Two Structures During the Start-Up of Motors with Load
5.3. Performance Comparison of Two Structures in Steady State with Sudden Changes of Load
6. Conclusions
- The structure adopts the mode selector to switch between working modes of the fuzzy controller. It automatically adjusts the softened coefficient according to different given speeds and maximum load torques, and then adjusts the softened speed so that each motor follows the trajectory of the softened speed in the starting process. These adjustments effectively reduce the synchronization error during the start-up of motors with load. At the same time, the advanced synchronization compensator is put forward to improve the system’s dynamic response.
- The synchronization performance of the fuzzy self-adjusting cross-coupling control structure under the steady state with a sudden change of load is analyzed. The experimental results show that the structure proposed in this paper can improve the system synchronization performance and dynamic response both in the starting process, and in the steady state with a sudden change of load.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, W.; Wu, Y.; Du, R.; Chen, Q.; Wu, X. Speed tracking and synchronization of a dual-motor system via second order sliding mode control. Math. Prob. Eng. 2013, 2013. [Google Scholar] [CrossRef]
- Jiang, C.; Chau, K.T.; Liu, C.; Lee, C.H.T. An overview of resonant circuits for wireless power transfer. Energies 2017, 10, 894. [Google Scholar] [CrossRef]
- Liu, M.; Gu, F.; Huang, J.; Wang, C.; Cao, M. Integration design and optimization control of a dynamic vibration absorber for electric wheels with in-wheel motor. Energies 2017, 10, 2069. [Google Scholar] [CrossRef]
- Li, X.; Chau, K.T.; Wang, Y. Modeling of a field-modulated permanent-magnet machine. Energies 2016, 9, 1078. [Google Scholar] [CrossRef]
- Wang, Q.; He, F. The synchronous control of multi-motor drive control system with floating compensation. In Proceedings of the 2016 12th World Congress on Intelligent Control and Automation (WCICA), Guilin, China, 12–15 June 2016. [Google Scholar] [CrossRef]
- Zhang, C.; Jia, L.; Xiao, Y.; He, J.; Xu, C. Virtual line-shafting control for permanent magnet synchronous motor systems using sliding-mode observer. IET Control Theory Appl. 2015, 9, 456–464. [Google Scholar] [CrossRef]
- Lin, F.J.; Hung, Y.C.; Ruan, K.C. An intelligent second-order sliding-mode control for an electric power steering system using a wavelet fuzzy neural network. IEEE Trans. Fuzzy Syst. 2014, 22, 1598–1611. [Google Scholar] [CrossRef]
- Shi, T.; Liu, H.; Geng, Q.; Xia, C. Improved relative coupling control structure for multi-motor speed synchronous driving system. IET Electr. Power Appl. 2016, 10, 451–457. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C.; Yu, F.; Lee, C.H.T. Design and evaluation of an efficient three-phase four-leg voltage source inverter with reduced IGBTs. Energies 2017, 10, 530. [Google Scholar] [CrossRef]
- Liu, X.; Lin, Q.; Fu, W. Optimal design of permanent magnet arrangement in synchronous motors. Energies 2017, 10, 1700. [Google Scholar] [CrossRef]
- Liu, M.; Gu, F.; Zhang, Y. Ride comfort optimization of in-wheel-motor electric vehicles with in-wheel vibration absorbers. Energies 2017, 10, 1647. [Google Scholar] [CrossRef]
- Chen, C.S.; Chen, L.Y. Robust cross-coupling synchronous control by shaping position commands in multiaxes system. IEEE Trans. Ind. Electron. 2012, 59, 4761–4773. [Google Scholar] [CrossRef]
- Chen, S.L.; Yang, J.H. Contouring control of biaxial systems with optimal and adaptive cross coupling controller. In Proceedings of the 2015 IEEE International Conference on Automation Science and Engineering (CASE), Suzhou, China, 23–25 October 2015. [Google Scholar] [CrossRef]
- Corapsiz, M.; Erenturk, K. Trajectory tracking control and contouring performance of three dimensional CNC. IEEE Trans. Ind. Electron. 2016, 63, 2212–2220. [Google Scholar] [CrossRef]
- Li, L.; Li, W.; Li, D.; Li, J.; Fan, Y. Research on strategies and methods suppressing permanent magnet demagnetization in permanent magnet synchronous motors based on a multi-physical field and rotor multi-topology structure. Energies 2018, 11, 40. [Google Scholar] [CrossRef]
- Su, K.H.; Cheng, M.Y. Contouring accuracy improvement using cross-coupled control and position error compensator. Int. J. Mach. Tools Manuf. 2008, 48, 1444–1453. [Google Scholar] [CrossRef]
- Zhao, D.Z.; Li, C.W.; Ren, J. Speed synchronisation of multiple induction motors with adjacent cross-coupling control. IET Control Theory Appl. 2010, 4, 119–128. [Google Scholar] [CrossRef]
- Zhu, X.; Yao, B.; Tao, G.; Wang, Q.; Cao, J. Adaptive robust synchronous control of a individual metering dual-cylinder pneumatic system with composite parallel method. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besancon, France, 8–11 July 2014. [Google Scholar] [CrossRef]
- Chen, Z.; He, J.; Zheng, Y.; Song, T.; Deng, Z. An optimized feedforward decoupling PD register control method of roll-to-roll web printing systems. IEEE Trans. Autom. Sci. Eng. 2016, 13, 274–283. [Google Scholar] [CrossRef]
- Chen, W.; Wang, D.; Geng, Q.; Xia, C. Robust adaptive cross-coupling position control of biaxial motion system. Sci. China Technol. Sci. 2015, 59, 680–688. [Google Scholar] [CrossRef]
- Anderson, R.G.; Meyer, A.J.; Valenzuela, M.A.; Lorenz, R.D. Web machine coordinated motion control via electronic line-shafting. IEEE Trans. Ind. Appl. 2001, 37, 247–254. [Google Scholar] [CrossRef]
- Koren, Y. Cross-coupled biaxial computer control for manufacturing systems. J. Dyn. Syst. Meas. Control 1980, 102, 265–272. [Google Scholar] [CrossRef]
- Gu, X.; Hu, S.; Shi, T.; Geng, Q. Multi-parameter decoupling on-line identification of permanent magnet synchronous motor based on neural network. Trans. China Electrotech. Soc. 2015, 30, 114–121. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, P.; Han, B.; Cheng, J. Rotor position measuring method for magnetic levitation high speed PMSM based on fuzzy sliding mode observer. Trans. China Electrotech. Soc. 2014, 29, 148–154. [Google Scholar] [CrossRef]
- Liu, G.; Zhang, J.; Zhao, W.; Zhang, Y.; Jiang, Y. Internal model control based on support vector machines generalized inverse for two-motor variable frequency system applications. Proc. CSEE 2011, 31, 85–91. [Google Scholar] [CrossRef]
- Lee, C.H.T.; Chau, K.T.; Cao, L. Development of reliable gearless motors for electric vehicles. IEEE Trans. Magn. 2017, 53, 1–8. [Google Scholar] [CrossRef]
- Yepes, A.G.; Vidal, A.; Lopez, O.; Doval-Gandoy, J. Evaluation of techniques for cross-coupling decoupling between orthogonal axes in double synchronous reference frame current control. IEEE Trans. Ind. Electron. 2014, 61, 3527–3531. [Google Scholar] [CrossRef]
- Zhao, X.; Zhao, J. Cross-coupled complementary sliding mode control for precision direct-drive gantry system. Trans. China Electrotech. Soc. 2015, 30, 7–12. [Google Scholar] [CrossRef]
- Huang, Z.; Chen, J. Analysis and implementation of permanent magnet synchronous motor control starting process for electric vehicle. Electr. Mach. Control Appl. 2015, 42, 60–64. [Google Scholar] [CrossRef]
- Harnefors, L.; Saarakkala, S.E.; Hinkkanen, M. Speed control of electrical drives using classical control methods. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011. [Google Scholar] [CrossRef]
- Zhao, X.; Zhao, J.; Li, H. Robust tracking control for direct drive XY table based on GPC and DOB. Trans. China Electrotech. Soc. 2015, 30, 150–154. [Google Scholar] [CrossRef]
- Tian, L.; Zhao, J.; Sun, J. Sensorless control of interior permanent magnet synchronous motor in low-speed region using novel adaptive filter. Energies 2016, 9, 1084. [Google Scholar] [CrossRef]
- Li, S.; Gu, H. Fuzzy adaptive internal model control schemes for PMSM speed-regulation system. IEEE Trans. Ind. Inform. 2012, 8, 767–779. [Google Scholar] [CrossRef]
- Zhou, J.; Zhao, Z.; Zhang, C.; Li, C.; Xu, Y. A real-time accurate model and its predictive fuzzy PID controller for pumped storage unit via error compensation. Energies 2017, 11, 35. [Google Scholar] [CrossRef]
- Shiau, J.K.; Wei, Y.C.; Lee, M.Y. Fuzzy controller for a voltage-regulated solar-powered MPPT system for hybrid power system applications. Energies 2015, 8, 3292–3312. [Google Scholar] [CrossRef]
- Liu, D.; Cui, Y.; Zhao, X.; Chen, M. Fuzzy control of speed of permanent magnet synchronous motor based on backstepping control. Trans. China Electrotech. Soc. 2014, 29, 38–44. [Google Scholar] [CrossRef]
- Zhang, D.; Chen, Y.; Ai, W.; Zhou, Z. A precision fuzzy control method of permanent magnetic linear motors. Trans. China Electrotech. Soc. 2007, 22, 64–68. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ωref | NB | NM | NS | ZO | PS | PM | PB | ||
| α | |||||||||
| TLmax | |||||||||
| NB | PB | PB | PB | PB | PM | PS | ZO | ||
| NM | PB | PB | PM | PM | PS | ZO | ZO | ||
| NS | PB | PM | PM | PS | ZO | ZO | NS | ||
| ZO | PM | PS | PS | ZO | NS | NS | NM | ||
| PS | PS | ZO | ZO | NS | NM | NM | NB | ||
| PM | ZO | ZO | NS | NM | NM | NB | NB | ||
| PB | ZO | NS | NM | NB | NB | NB | NB | ||
| Condition | ① | ② | ③ | ④ | ⑤ | ⑥ | |
|---|---|---|---|---|---|---|---|
| Variate | |||||||
| ωref (r/min) | 1000 | 800 | 1000 | 800 | 500 | 500 | |
| TLmax (N·m) | 15 | 15 | 5 | 5 | 15 | 5 | |
| α | 0.27 | 0.31 | 0.35 | 0.45 | 0.4 | 0.7 | |
| Motors | TN (N·m) | J (kg·m²) | nN (r/min) | p | PN (kW) |
|---|---|---|---|---|---|
| M | 15 | 2.72 × 10−3 | 1500 | 2 | 2.3 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Liang, J.; Shi, T. Speed Synchronous Control of Multiple Permanent Magnet Synchronous Motors Based on an Improved Cross-Coupling Structure. Energies 2018, 11, 282. https://doi.org/10.3390/en11020282
Chen W, Liang J, Shi T. Speed Synchronous Control of Multiple Permanent Magnet Synchronous Motors Based on an Improved Cross-Coupling Structure. Energies. 2018; 11(2):282. https://doi.org/10.3390/en11020282
Chicago/Turabian StyleChen, Wei, Jiaojiao Liang, and Tingna Shi. 2018. "Speed Synchronous Control of Multiple Permanent Magnet Synchronous Motors Based on an Improved Cross-Coupling Structure" Energies 11, no. 2: 282. https://doi.org/10.3390/en11020282
APA StyleChen, W., Liang, J., & Shi, T. (2018). Speed Synchronous Control of Multiple Permanent Magnet Synchronous Motors Based on an Improved Cross-Coupling Structure. Energies, 11(2), 282. https://doi.org/10.3390/en11020282