Active Stabilization Control of Multi-Terminal AC/DC Hybrid System Based on Flexible Low-Voltage DC Power Distribution

Abstract
:1. Introduction
2. Coordinated Control Mode of Low-Voltage (LV) Multi-Terminal AC/DC Hybrid System
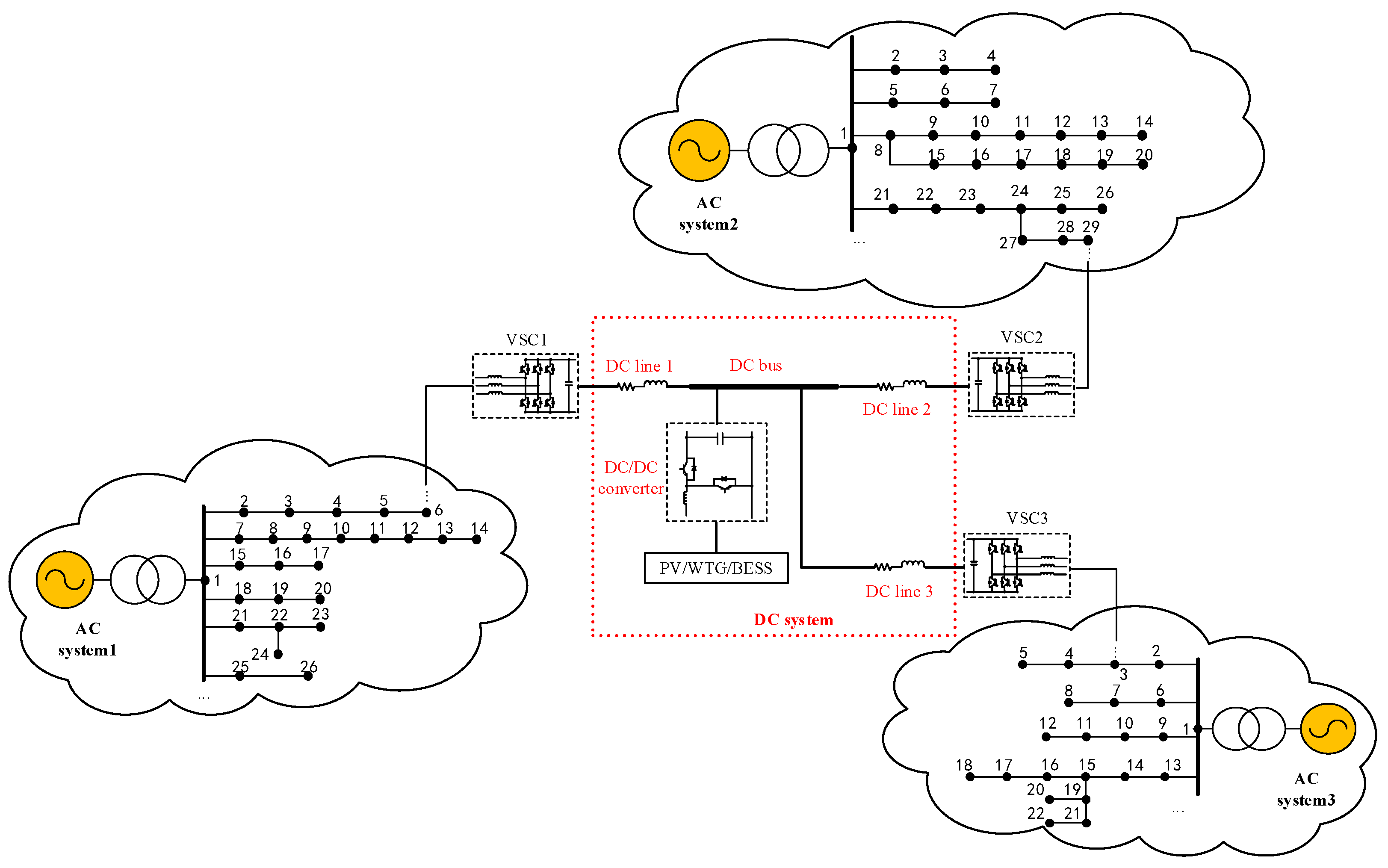
2.1. System Structure
2.2. Coordinated Control Mode
3. System Stability Analysis
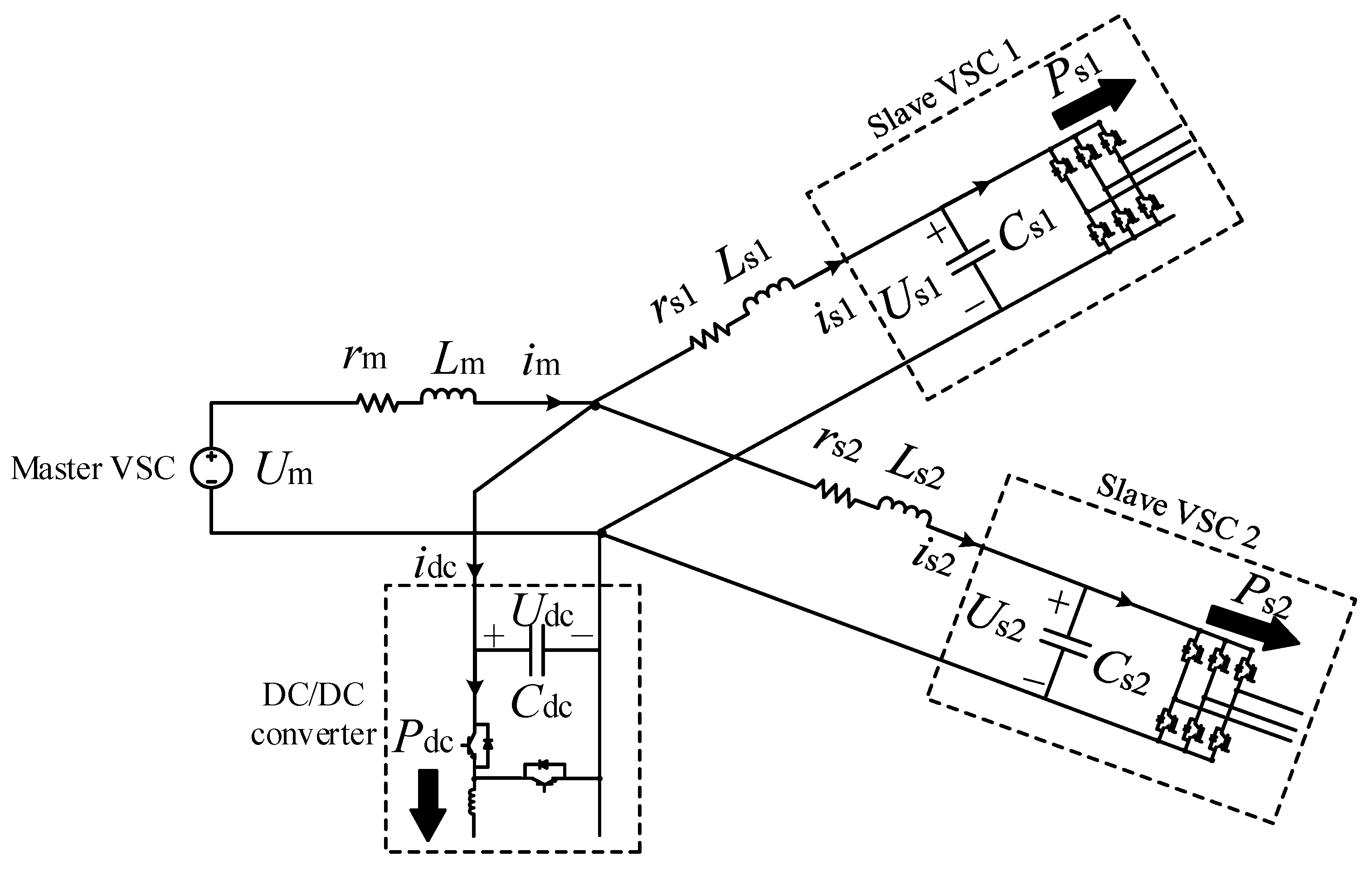
3.1. Equivalent Structure
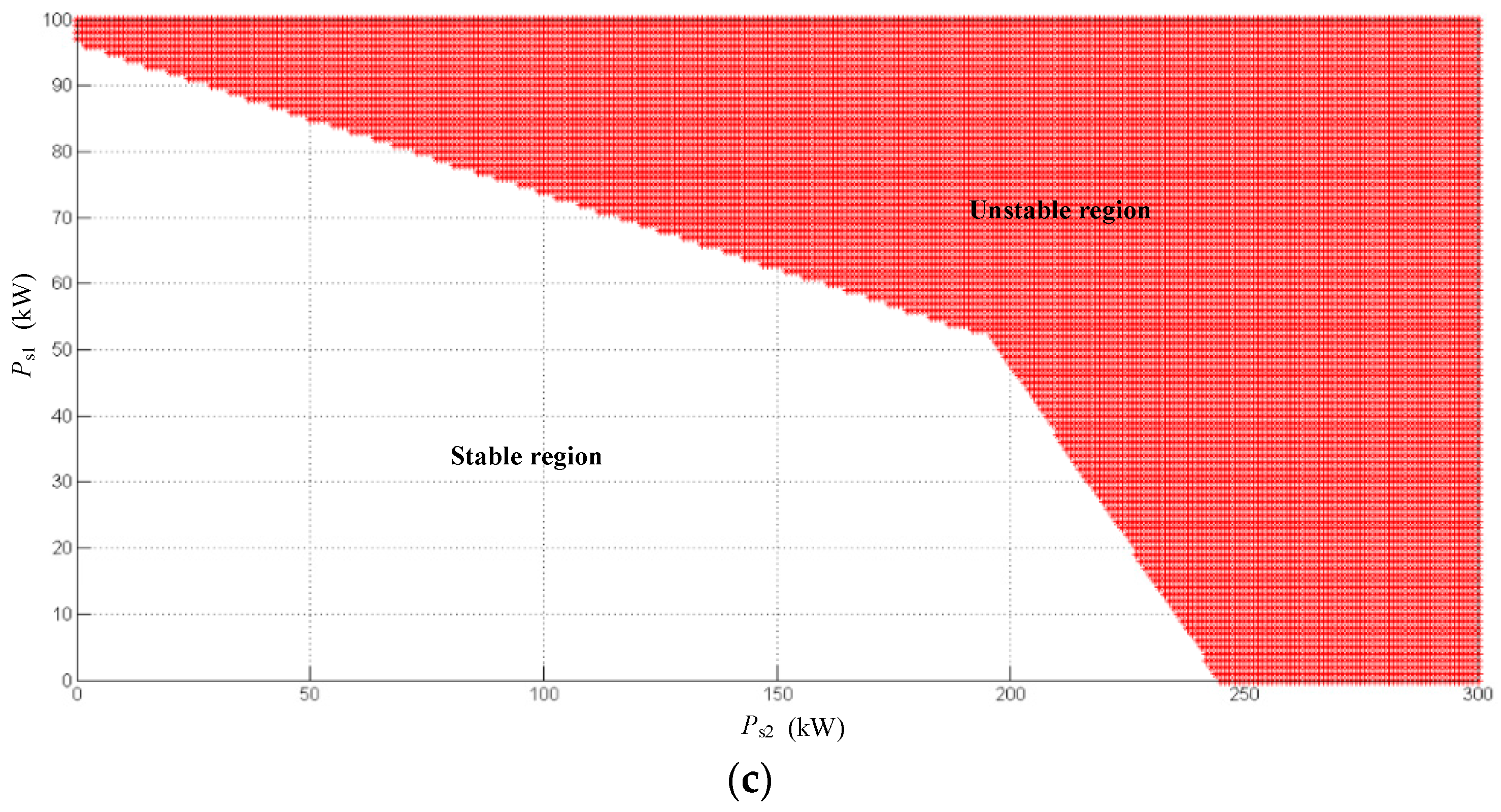
3.2. Stable Operation Boundary of Voltage-Source Converter (VSC)
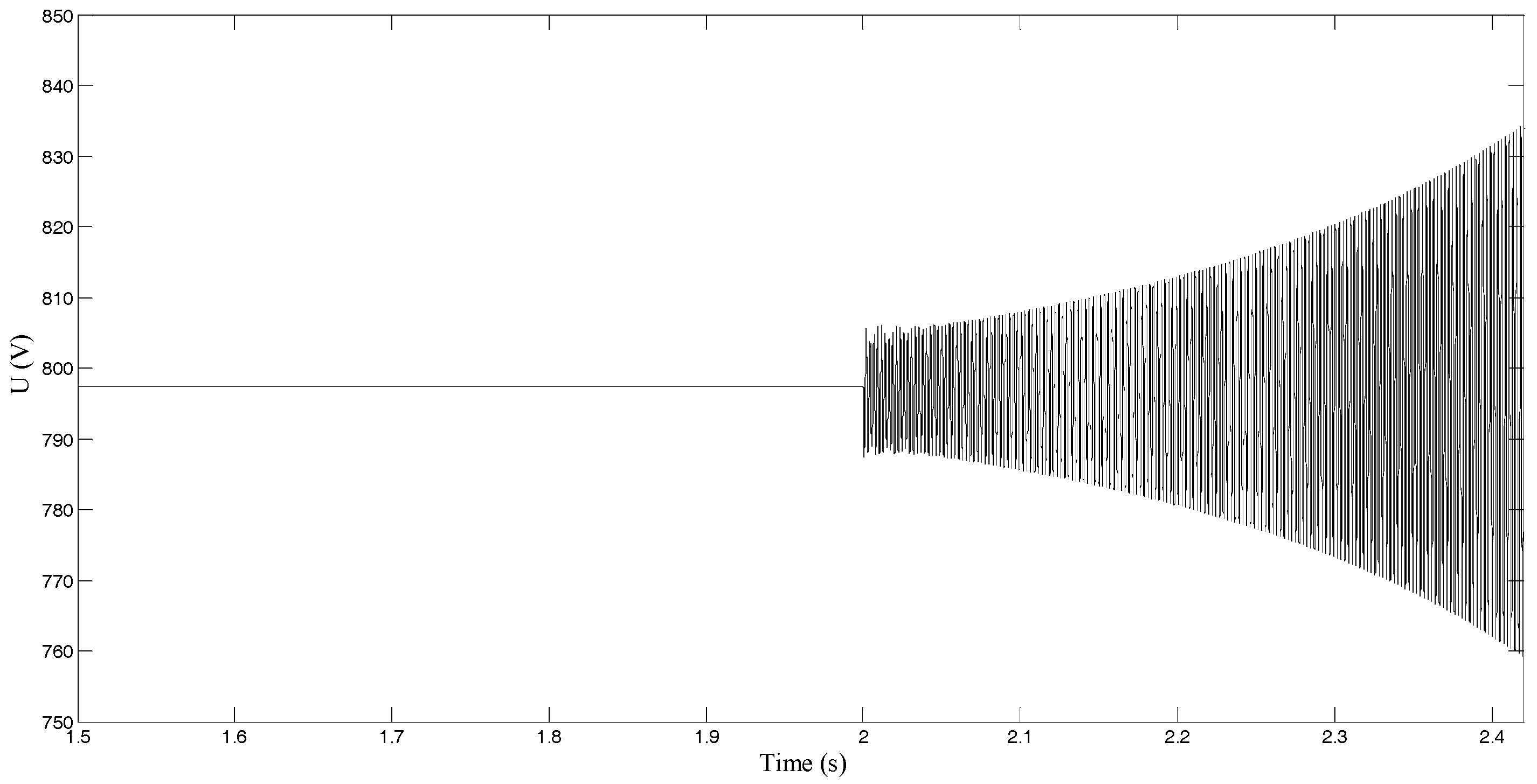
3.3. Instability Analysis
4. Active Stabilization Control of LV Multi-Terminal AC/DC Hybrid System
4.1. Stabilization Modeling
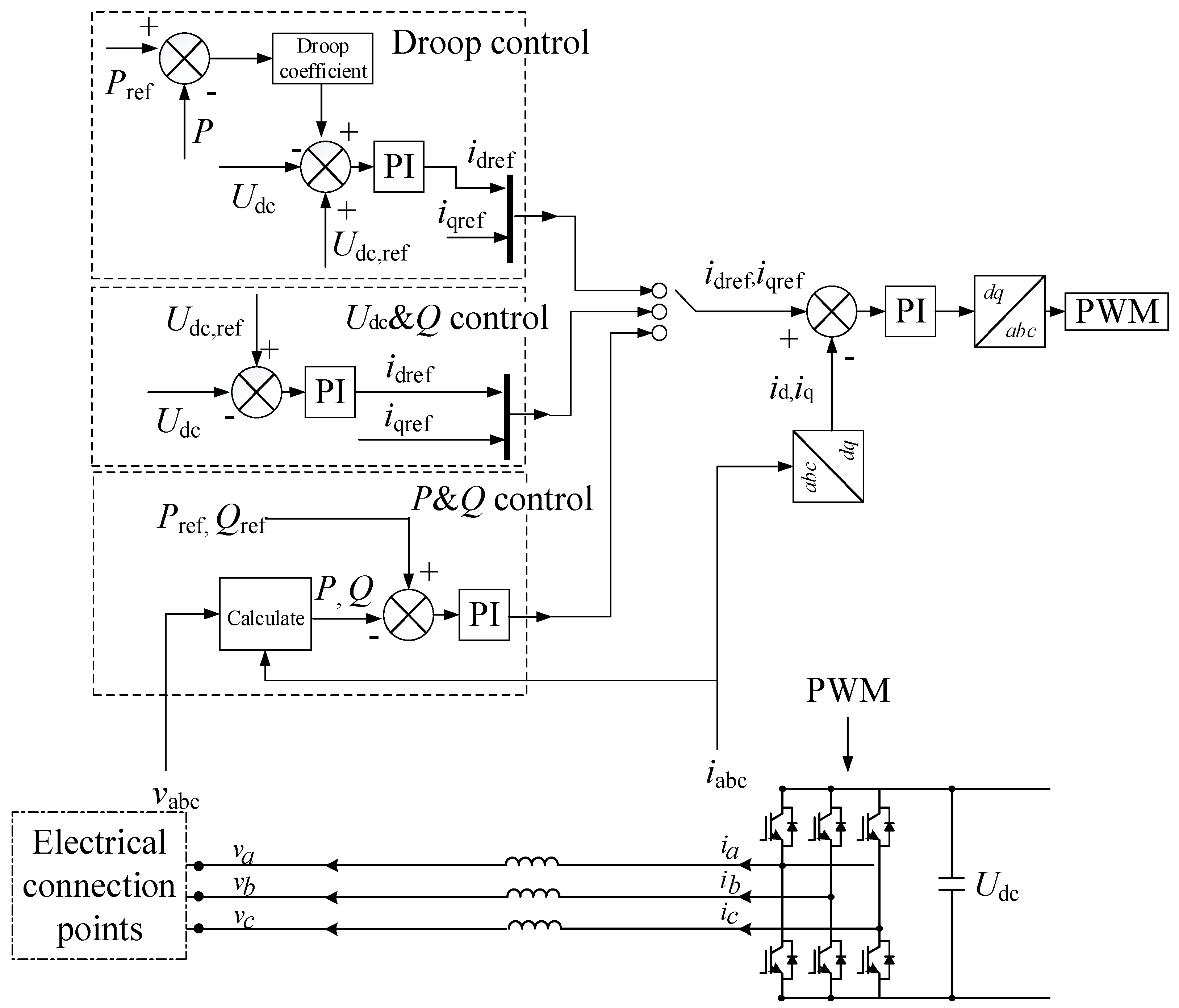
4.2. Active Stabilization Control Block
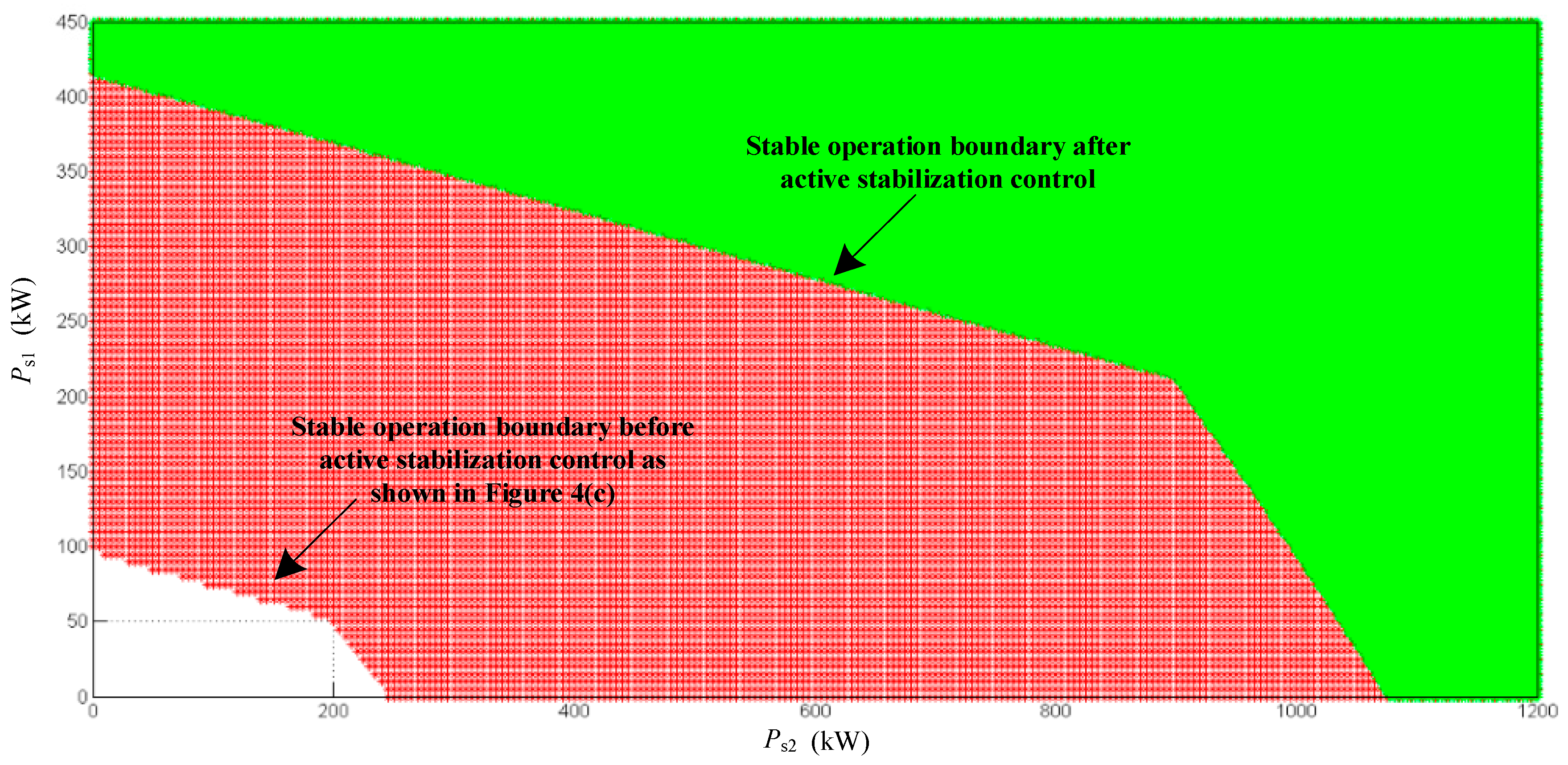
4.3. Stable Operation Boundary of VSC after Implementation of Active Stabilization Control
5. Simulation and Verification
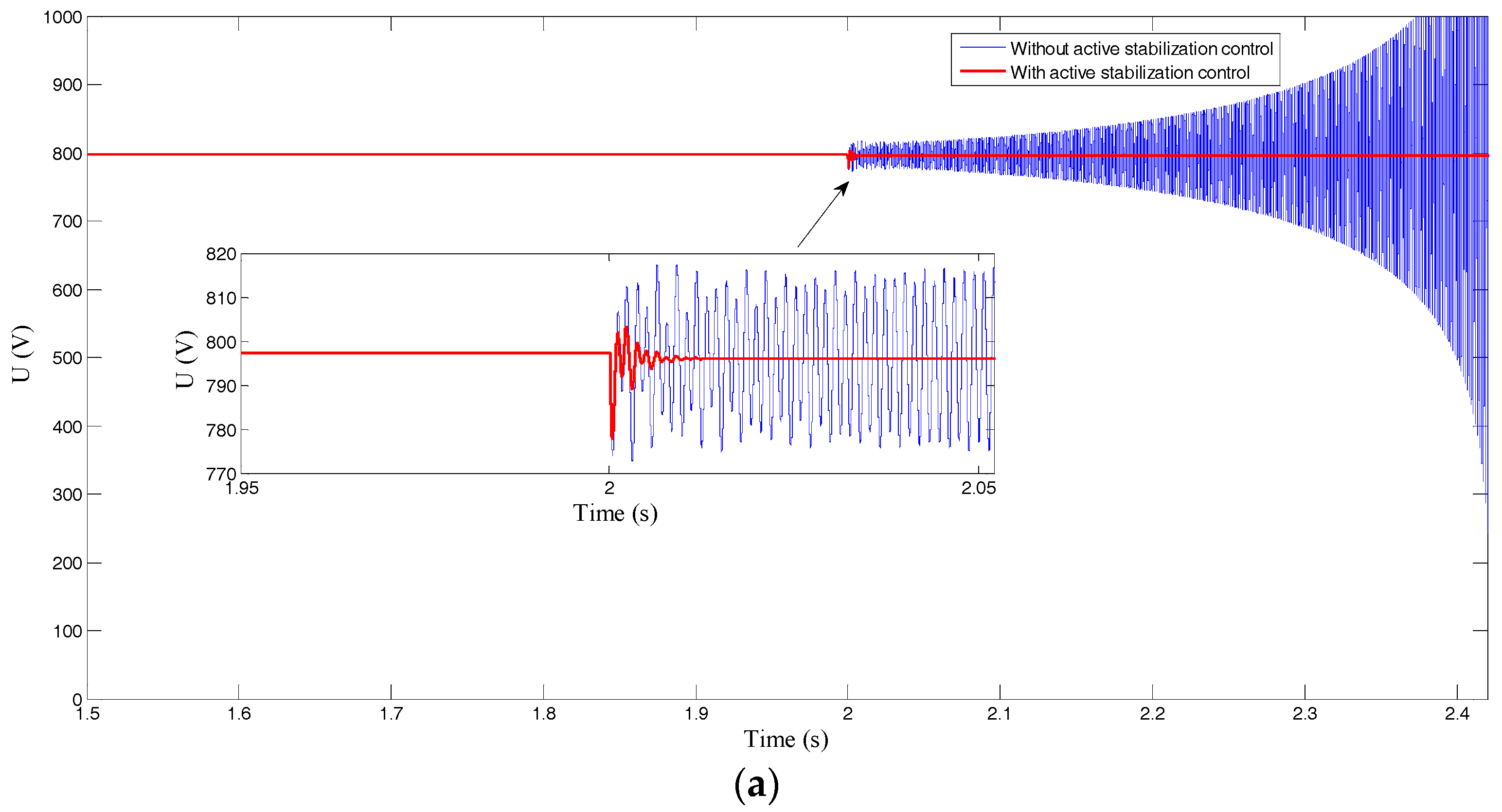
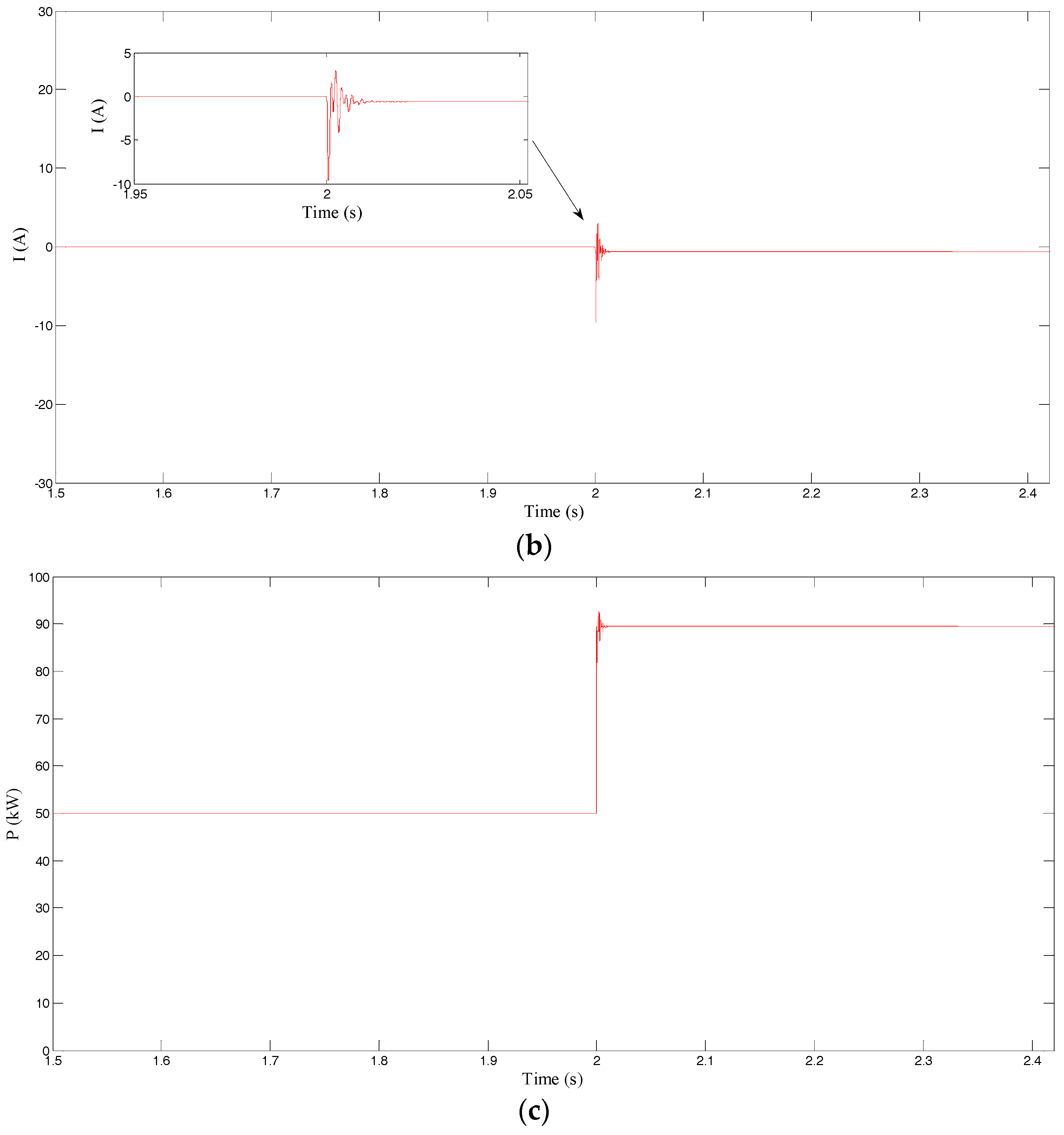
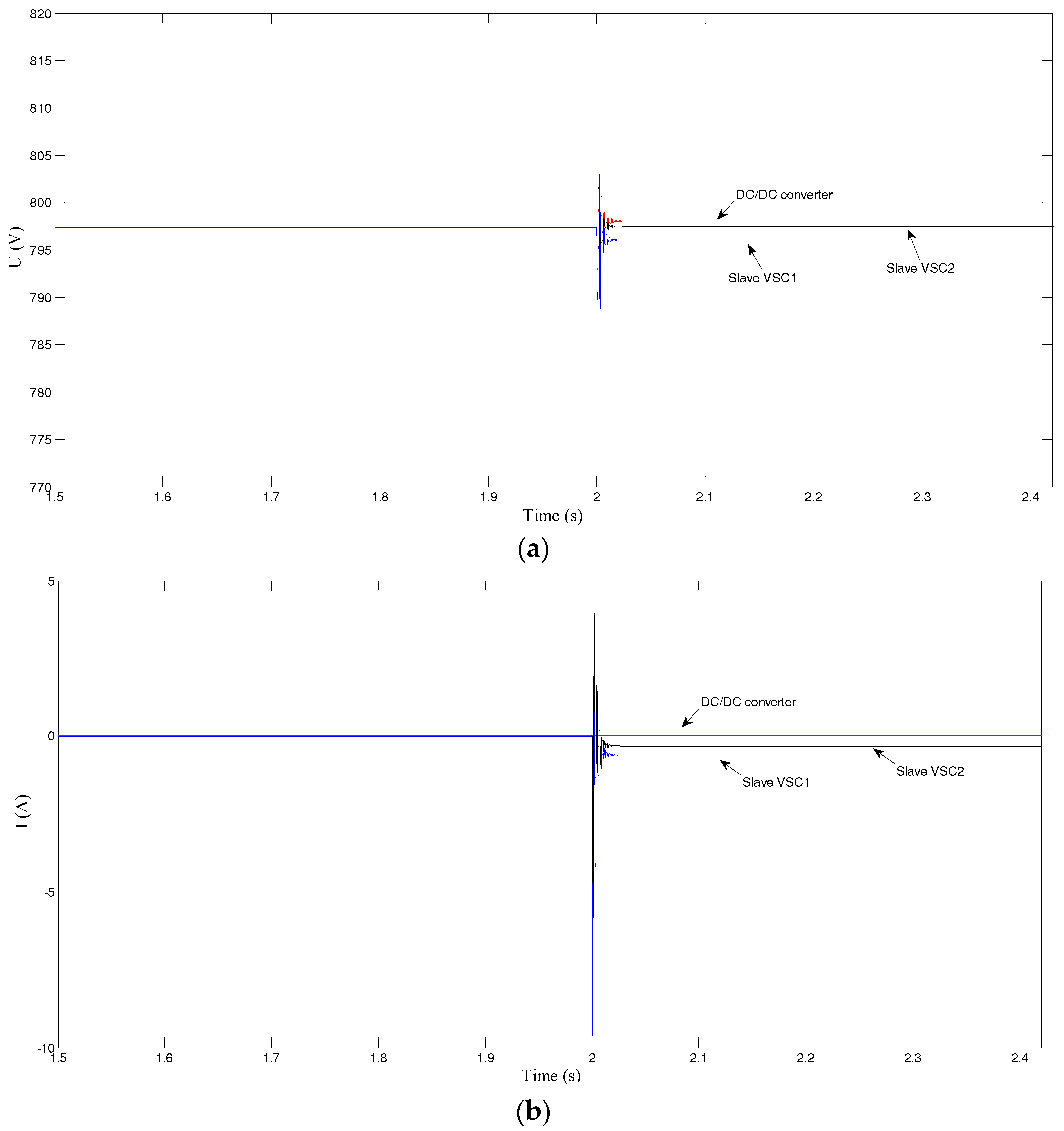
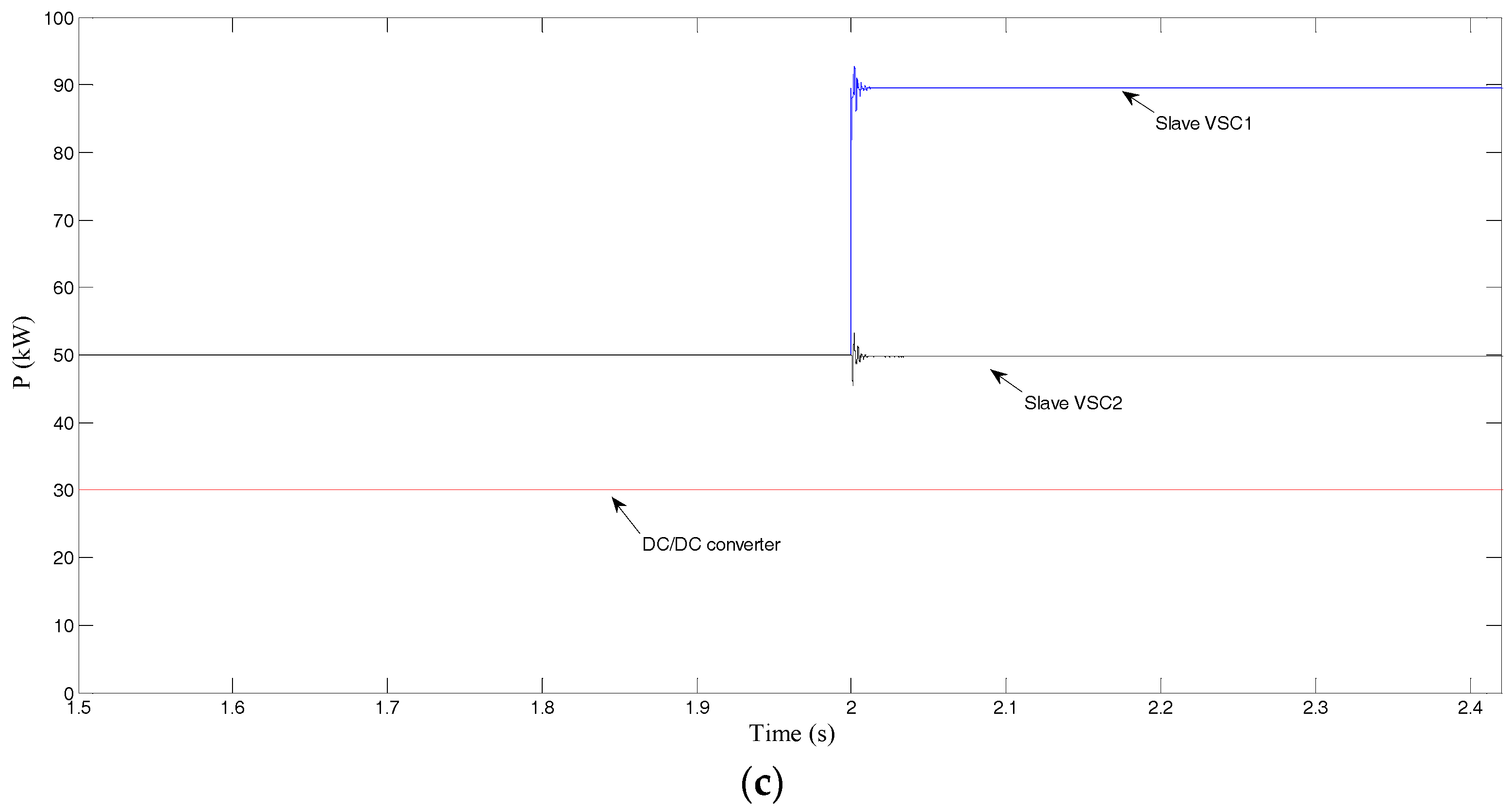
5.1. Active Stabilization Control of the Multi-Terminal VSC and the DC/DC Converter
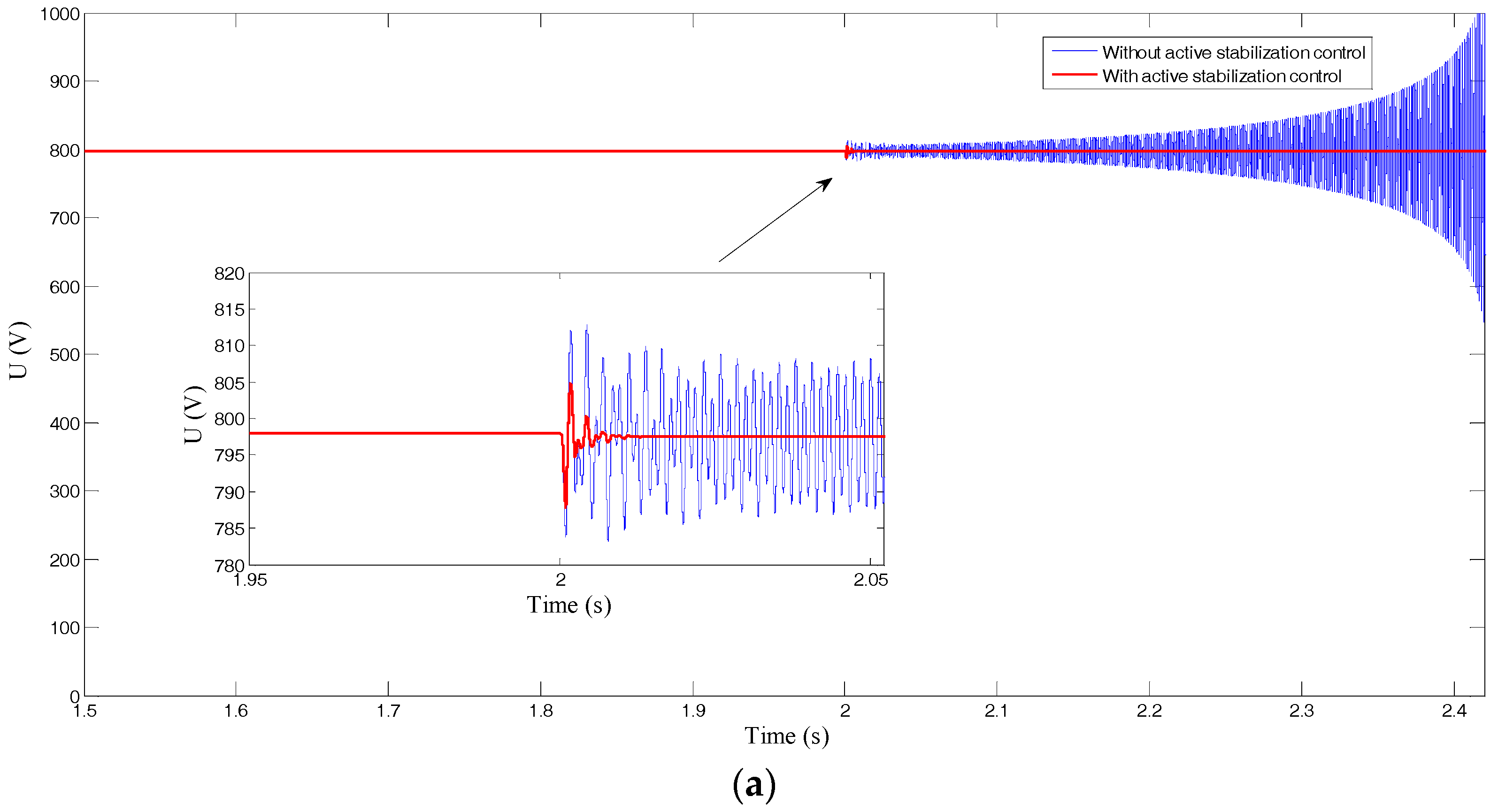
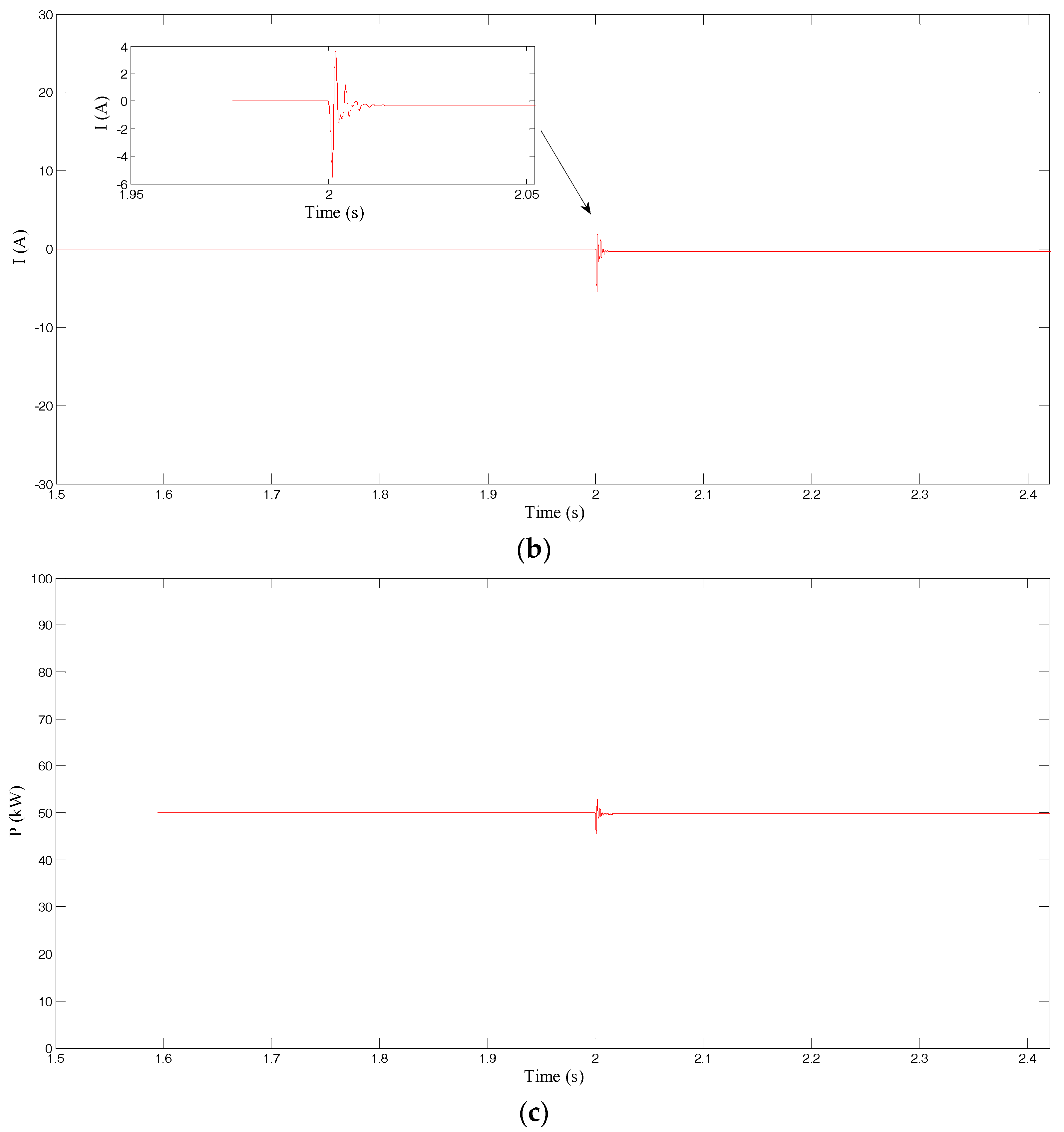
5.2. Active Stabilization Control of Multi-Terminal VSC
5.3. Comparison of the Two Methods
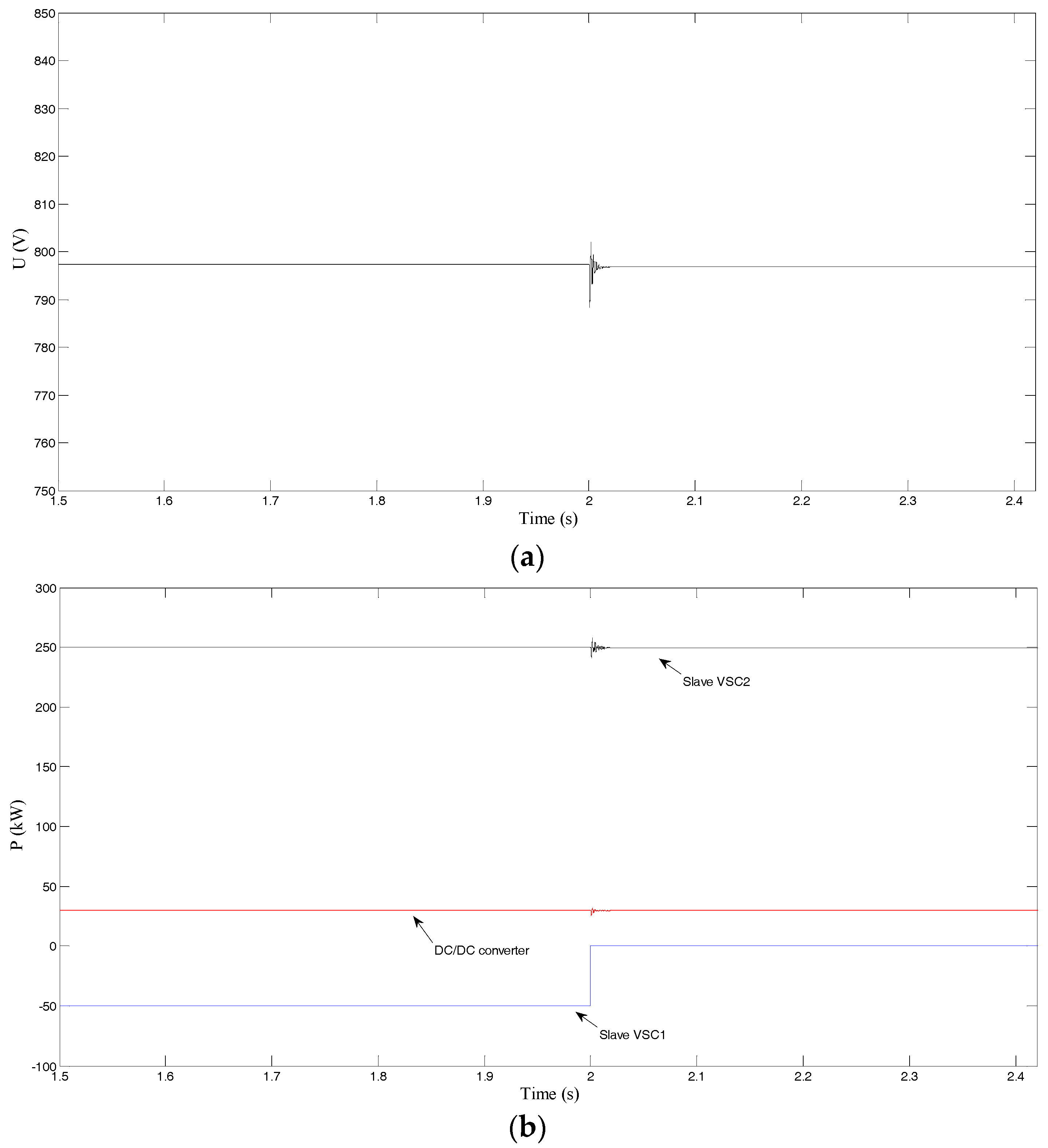
5.4. Simulation for Tripping Converter
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shamsi, P.; Fahimi, B. Stability assessment of a DC distribution network in a hybrid micro-grid application. IEEE Trans. Smart Grid 2014, 5, 2527–2534. [Google Scholar] [CrossRef]
- Lee, S.H.; Kang, Y.C.; Park, J.W. Optimal operation of multiple DGs in DC distribution system to improve system efficiency. IEEE Trans. Ind. Appl. 2016, 52, 3673–3681. [Google Scholar] [CrossRef]
- Deng, W.; Pei, W.; Shen, Z.Q.; Zhao, Z.X.; Qu, H. Adaptive Micro-Grid Operation Based on IEC 61850. Energies 2015, 8, 4455–4475. [Google Scholar] [CrossRef]
- Chen, S.M.; Liang, T.J.; Hu, K.R. Design, analysis, and implementation of solar power optimizer for DC distribution system. IEEE Trans. Power Electron. 2013, 28, 1764–1772. [Google Scholar] [CrossRef]
- Davari, M.; Mohamed, Y.A.R.I. Robust multi-objective control of VSC-based DC-voltage power port in hybrid AC/DC multi-terminal micro-grids. IEEE Trans. Smart Grid 2013, 4, 1597–1612. [Google Scholar] [CrossRef]
- Chaudhary, S.K.; Guerrero, J.M.; Teodorescu, R. Enhancing the capacity of the AC distribution system using DC interlinks—A step toward future DC grid. IEEE Trans. Smart Grid 2015, 6, 1722–1729. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Robust optimal power management system for a hybrid AC/DC micro-grid. IEEE Trans. Sustain. Energy 2015, 6, 675–687. [Google Scholar] [CrossRef]
- Peña-Alzola, R.; Bianchi, M.A.; Ordonez, M. Control design of a PFC with harmonic mitigation function for small hybrid AC/DC buildings. IEEE Trans. Power Electron. 2016, 31, 6607–6620. [Google Scholar] [CrossRef]
- Eghtedarpour, N.; Farjah, E. Power control and management in a hybrid AC/DC microgrid. IEEE Trans. Smart Grid 2014, 5, 1494–1505. [Google Scholar] [CrossRef]
- Boroyevich, D.; Cvetkovic, I.; Dong, D. Future electronic power distribution systems: A contemplative view. In Proceedings of the 2010 12th International Conference on Optimization of Electrical and Electronic Equipment, Basov, Russia, 20–22 May 2010; Volume 1, pp. 1369–1380. [Google Scholar]
- Liang, Z.; Guo, R.; Li, J. A high-efficiency PV module-integrated DC/DC converter for PV energy harvest in FREEDM systems. IEEE Trans. Power Electron. 2011, 26, 897–909. [Google Scholar] [CrossRef]
- Kakigano, H.; Miura, Y.; Ise, T. Low-voltage bipolar-type DC microgrid for super high quality distribution. IEEE Trans. Power Electron. 2010, 25, 3066–3075. [Google Scholar] [CrossRef]
- Bifaretti, S.; Zanchetta, P.; Watson, A. Advanced power electronic conversion and control system for universal flexible power management. IEEE Trans. Smart Grid 2011, 2, 231–243. [Google Scholar] [CrossRef]
- Li, K.; Wei, P.; Hua, Y.; Xue, Z.; Zekun, L.; Yao, L.; Jin, J. Review of pattern, control and stability for hybrid AC/DC distribution power systems. Adv. Technol. Electr. Eng. Energy 2017, 36, 1–10. (In Chinese) [Google Scholar]
- Liu, X.; Wang, P.; Loh, P.C. A hybrid AC/DC microgrid and its coordination control. IEEE Trans. Smart Grid 2011, 2, 278–286. [Google Scholar]
- Ritwik, M. A hybrid microgrid with DC connection at back to back converters. IEEE Trans. Smart Grid 2014, 5, 251–259. [Google Scholar]
- Zhang, X.; Pei, W.; Deng, W.; Qu, H.; Shen, Z.Q.; Zhao, Z.X. Energy management and coordinated control method for multi-source/multi-load DC microgrid. Proc. Chin. Soc. Electr. Eng. 2014, 34, 5553–5562. (In Chinese) [Google Scholar]
- Xiao, H.; Luo, A.; Shuai, Z.; Jin, G.; Huang, Y. An improved control method for multiple bidirectional power converters in hybrid ac/dc microgrid. IEEE Trans. Smart Grid 2016, 7, 340–347. [Google Scholar] [CrossRef]
- Loh, P.C.; Ding, Li.; Chai, Y.; Blaabjerg, F. Autonomous operation of hybrid microgrid with ac and dc subgrids. IEEE Trans. Power Electron. 2013, 28, 2214–2223. [Google Scholar] [CrossRef]
- Peyghami, S.; Mokhtari, H.; Blaabjer, F. Autonomous operation of a hybrid ac/dc microgrid with multiple interlinking converters. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Sulligoi, G.; Bosich, D.; Giadrossi, G.; Zhu, L.; Cupelli, M.; Monti, A. Multiconverter medium voltage DC power systems on ships: Constant-power loads instability solution using linearization via state feedback control. IEEE Trans. Smart Grid 2014, 5, 2543–2552. [Google Scholar] [CrossRef]
- Marx, D.; Magne, P.; Nahid-Mobarakeh, B.; Pierfederici, S.; Davat, B. Large signal stability analysis tools in DC power systems with constant power loads and variable power loads—A review. IEEE Trans. Power Electron. 2012, 27, 1773–1787. [Google Scholar] [CrossRef]
- Magne, P.; Nahid-Mobarakeh, B.; Pierfederici, S. General active global stabilization of multiloads DC-power networks. IEEE Trans. Power Electron. 2012, 27, 1788–1798. [Google Scholar] [CrossRef]
- Khalil, H. Nonlinear Systems, 3rd ed.; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 2002. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Symbol | Value |
|---|---|---|---|
| rm | 0.0091 Ω | Ls2 | 0.04469 mH |
| Lm | 0.04469 mH | Cs2 | 1050 μF |
| Cdc | 1000 μF | Um | 800 V |
| rs1 | 0.0182 Ω | Pm,rated | 500 kW |
| Ls1 | 0.0894 mH | Ps1,rated | 100 kW |
| Cs1 | 500 μF | Ps2,rated | 300 kW |
| rs2 | 0.009 Ω | Pdc,rated | 80 kW |
| Symbol | Multi-Terminal VSC and DC/DC Converter | Multi-Terminal VSC | ||
|---|---|---|---|---|
| Oscillation Peak (%) | Adjustment Time | Oscillation Peak (%) | Adjustment Time | |
| Udc | 0.79 | 0.025 s | 0.85 | 0.04 s |
| Us1 | 2.25 | 0.035 s | 2.26 | 0.06 s |
| Us2 | 1.19 | 0.023 s | 1.25 | 0.045 s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, W.; Pei, W.; Li, L. Active Stabilization Control of Multi-Terminal AC/DC Hybrid System Based on Flexible Low-Voltage DC Power Distribution. Energies 2018, 11, 502. https://doi.org/10.3390/en11030502
Deng W, Pei W, Li L. Active Stabilization Control of Multi-Terminal AC/DC Hybrid System Based on Flexible Low-Voltage DC Power Distribution. Energies. 2018; 11(3):502. https://doi.org/10.3390/en11030502
Chicago/Turabian StyleDeng, Wei, Wei Pei, and Luyang Li. 2018. "Active Stabilization Control of Multi-Terminal AC/DC Hybrid System Based on Flexible Low-Voltage DC Power Distribution" Energies 11, no. 3: 502. https://doi.org/10.3390/en11030502
APA StyleDeng, W., Pei, W., & Li, L. (2018). Active Stabilization Control of Multi-Terminal AC/DC Hybrid System Based on Flexible Low-Voltage DC Power Distribution. Energies, 11(3), 502. https://doi.org/10.3390/en11030502