Adaptive Controller of the Major Functions for Controlling a Drive System with Elastic Couplings


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
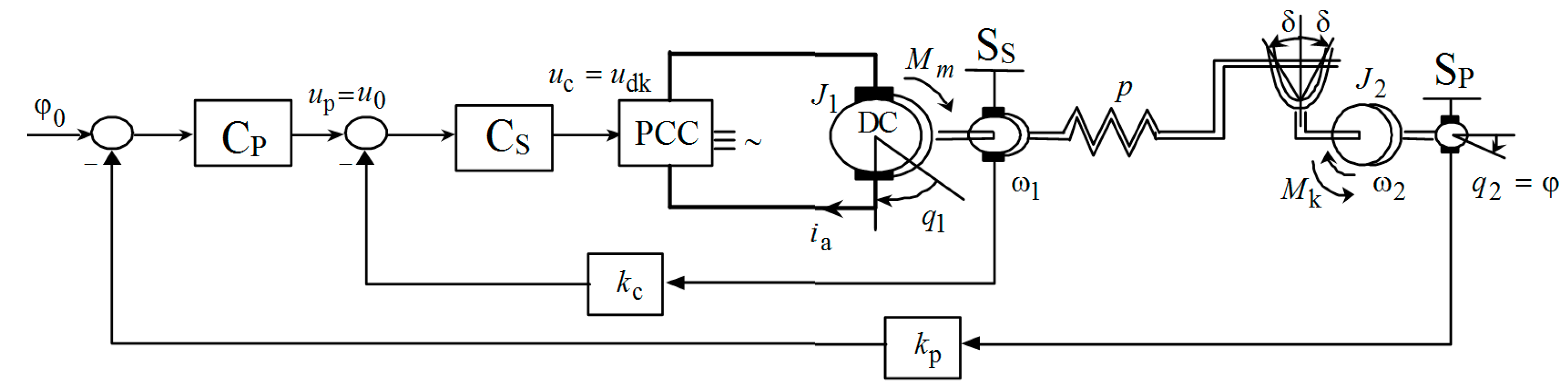
2. The Nonlinear Model of the Drive System with Elastic Couplings
- ωi, are the speeds or angular velocities of the blocks;
- Ji, are the inertias of the blocks; and
- fyi, are the elastic forces when taking account of the slit (2δi) between joints, fyi calculated as follows:
- ui, are the control signals which impact on the blocks with the coefficient bi, and
- myi, are the elastic moments, which are calculated as follows:
- ω1, ω2 are the rotation speeds of the first disk block and the second disk block and my is the elastic moment when ignoring the slit;
- J1, J2 are the inertia moments of the first disk block and the second disk block; and
- fy is the elastic force when taking account of the slit (2δ) in the elastic coupling:
- Mk is the friction moment, and is calculated as follows:where Mn is the norm moment of the motor. Additionally:
- p is the elastic coefficient of the coupling,
- ke and km are the coefficients of the motor structure, ky is the transmission coefficient of the converter, kc is the transmission coefficient of the speed sensor, βc is the proportional coefficient of the speed controller, and Ra is the armature resistance of the DC motor. i denotes the gear transmission coefficient between the first disk block and the drive motor.
- u is the overall control signal: u = u0 + ua, with u0 = up the desired speed signal and ua is the control signal which needs to be determined.
3. Control System Based on an Adaptive Controller of the Major Functions
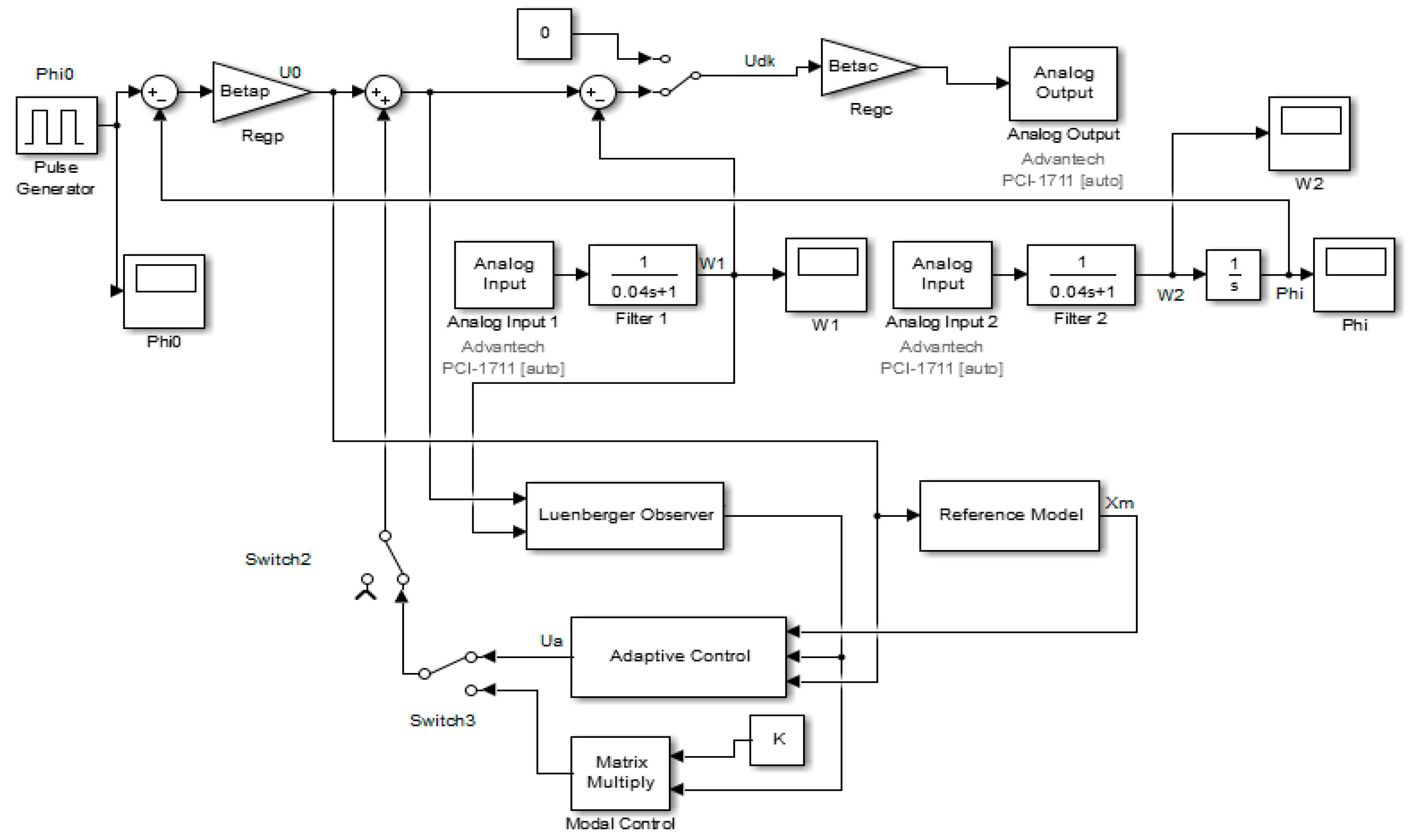
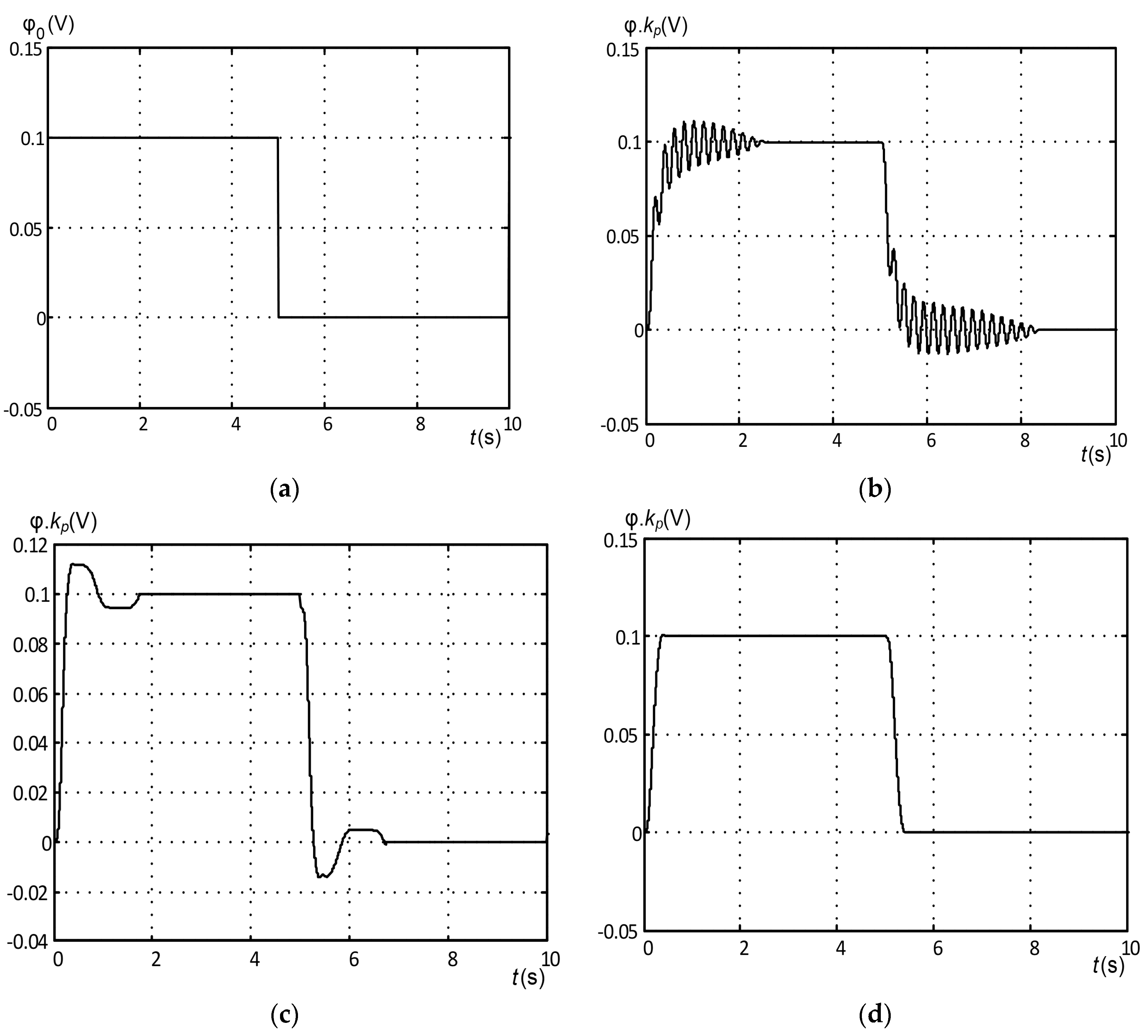
4. Setting up the Algorithm and Running the Experimental System
- (1)
- (2)
- (3)
- The adaptive control block is built based on parameter adjustment principles of the adaptive major functions controller (according to Equations (18) and (19)) so that the dynamic characteristic of the control object is close to that of the reference model and the effects of the nonlinear elements are minimal. In the adaptive algorithms shown in Equations (18) and (19), the state vector of the control object is replaced by the state vector of the Luenberger observer.
- (1)
- The parameters of the DC motor: norm power Pn = 9.25 W; norm speed nn = 4500 rpm; norm moment Mn = 0.0196 Nm; norm voltage Un = 27 V; norm current In = 0.7 A; efficiency η = 49%; armature resistor Ra = 11 Ω, coefficient ke = 0.041; and coefficient km = 0.028.
- (2)
- The other parameters: ky = 2.78; kc = 0.0098 V·s/rad; βc = 8.047; kp = 0.0412 V/rad; βp = 149.12; J01 = 0.004 kg·m2; J02 = 0.003 kg·m2; and p0 = 1.5 Nm/rad.
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Hori, Y.; Sawada, H.; Chun, Y. Slow resonance ratio control for vibration suppression and disturbance rejection in torsional system. IEEE Trans. Ind. Electron. 1999, 46, 162–168. [Google Scholar] [CrossRef]
- Preitl, S.; Precup, R.E.; Stînean, A.I.; Dragos, C.A.; Radac, M.B. Control Structures for Variable Inertia Output Coupled Drives. In Proceedings of the 4th IEEE International Symposium on Logistics and Industrial Informatics (LINDI), Smolenice, Slovakia, 5–7 September 2012; pp. 179–184. [Google Scholar]
- Amann, N.; Bocker, J.; Prenner, F. Active damping of drive train oscillations for an electrically driven vehicle. IEEE/ASME Trans. Mechatron. 2004, 9, 697–700. [Google Scholar] [CrossRef]
- Boukhezzar, B.; Siguerdidjane, H. Comparison between linear and nonlinear control strategies for variable speed wind turbines. Control Eng. Pract. 2010, 18, 1357–1368. [Google Scholar] [CrossRef]
- Salman, S.K.; Teo, A.L. Windmill modeling consideration and factors influencing the stability of a grid-connected wind power-based embedded generator. IEEE Trans. Power Syst. 2003, 18, 793–802. [Google Scholar] [CrossRef]
- Chang, Y.C.; Yen, H.M. Design of a robust position feedback tracking controller for flexible-joint robots. IET Control Theory Appl. 2011, 5, 351–363. [Google Scholar] [CrossRef]
- Valenzuela, M.A.; Bentley, J.M.; Lorenz, R.D. Computer-aided controller setting procedure for paper machine drive systems. IEEE Trans. Ind. Appl. 2009, 45, 638–650. [Google Scholar] [CrossRef]
- Bahr, A.; Beineke, S. Mechanical Resonance Damping in an Industrial Servo Drive. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–10. [Google Scholar]
- Zhang, G. Speed control of two-inertia system by PI/PID control. IEEE Trans. Ind. Electron. 2000, 47, 603–609. [Google Scholar] [CrossRef]
- Preitl, S.; Precup, R.E. An extension of tuning relations after symmetrical optimum method for PI and PID controllers. Automatica 1999, 35, 1731–1736. [Google Scholar] [CrossRef]
- Szabat, K.; Orlowska-Kowalska, T. Performance improvement of industrial drives with mechanical elasticity using nonlinear adaptive Kalman filter. IEEE Trans. Ind. Electron. 2008, 55, 1075–1084. [Google Scholar] [CrossRef]
- Dhaouadi, R.; Kubo, K.; Tobise, M. Two-degree-of-freedom robust speed controller for high-performance rolling mill drives. IEEE Trans. Ind. Appl. 1993, 29, 919–926. [Google Scholar] [CrossRef]
- Williams, R.L.; Lawrence, D.A. Linear State-Space Control Systems; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Jezernik, K.; Sabanovic, A. SMC with disturbance observer for a linear belt drive. IEEE Trans. Ind. Electron. 2007, 54, 3402–3412. [Google Scholar]
- Koronki, P.; Hashimoto, H.; Utkin, V. Direct torsion control of flexible shaft in an observer-based discrete-time sliding mode. IEEE Trans. Ind. Electron. 1998, 45, 291–296. [Google Scholar] [CrossRef]
- Erenturk, K. Nonlinear two-mass system control with sliding-mode and optimised proportional–integral derivative controller combined with a grey estimator. IET Control Theory Appl. 2008, 2, 635–642. [Google Scholar] [CrossRef]
- Xu, R.; Özgüner, Ü. Sliding mode control of a class of underactuated systems. Automatica 2008, 44, 233–241. [Google Scholar] [CrossRef]
- Brock, S.; Łuczak, D.; Nowopolski, K.; Pajchrowski, T.; Zawirski, K. Two Approaches to Speed Control for Multi-Mass System with Variable Mechanical Parameters. IEEE Trans. Ind. Electron. 2017, 64, 3338–3347. [Google Scholar] [CrossRef]
- Derugo, P.; Szabat, K. Adaptive neuro-fuzzy PID controller for nonlinear drive system. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2015, 34, 792–807. [Google Scholar] [CrossRef]
- Graichen, K.; Zeitz, M. Feedforward control design for finite-time transition problems of nonlinear systems with input and output constraints. IEEE Trans. Autom. Control 2008, 53, 1273–1278. [Google Scholar] [CrossRef]
- Thomsen, S.; Fuchs, F.W. Flatness Based Speed Control of Drive Systems with Resonant Loads. In Proceedings of the IECON 2010—36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 120–125. [Google Scholar]
- Tavakoli, M.; Taghirad, H.D.; Abrishamchian, M. Identification and robust H∞ control of the rotational/translational actuator system. Int. J. Control Autom. Syst. 2005, 3, 387–396. [Google Scholar]
- SerkieS, P. Comparison of the control methods of electrical drives with an elastic coupling allowing to limit the torsional torque amplitude. EKSPLOATACJA I NIEZAWODNOSC 2017, 19, 203. [Google Scholar] [CrossRef]
- Kang, J.K.; Sul, S.K. Vertical-vibration control of elevator using estimated car acceleration feedback compensation. IEEE Trans. Ind. Electron. 2000, 47, 91–99. [Google Scholar] [CrossRef]
- Katsura, S.; Ohnishi, K. Absolute stabilization of multimass resonant system by phase-lead compensator based on disturbance observer. IEEE Trans. Ind. Electron. 2007, 54, 3389–3396. [Google Scholar] [CrossRef]
- Katsura, S.; Matsumoto, Y.; Ohnishi, K. Modeling of force sensing and validation of disturbance observer for force control. IEEE Trans. Ind. Electron. 2007, 54, 530–538. [Google Scholar] [CrossRef]
- De Araujo, P.B.; Zanetta, L.C. Pole placement method using the system matrix transfer function and sparsity. Int. J. Electr. Power Energy Syst. 2001, 23, 173–178. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. Stochastic system identification for operational modal analysis: A review. J. Dyn. Syst. Meas. Control 2001, 123, 659–667. [Google Scholar] [CrossRef]
- Duan, G.R.; Patton, R.J. Robust fault detection using Luenberger-type unknown input observers-a parametric approach. Int. J. Syst. Sci. 2001, 32, 533–540. [Google Scholar] [CrossRef]
- Hu, X.; Sun, F.; Zou, Y. Estimation of state of charge of a lithium-ion battery pack for electric vehicles using an adaptive Luenberger observer. Energies 2010, 3, 1586–1603. [Google Scholar] [CrossRef]






© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tran Anh, D.; Nguyen Trong, T. Adaptive Controller of the Major Functions for Controlling a Drive System with Elastic Couplings. Energies 2018, 11, 531. https://doi.org/10.3390/en11030531
Tran Anh D, Nguyen Trong T. Adaptive Controller of the Major Functions for Controlling a Drive System with Elastic Couplings. Energies. 2018; 11(3):531. https://doi.org/10.3390/en11030531
Chicago/Turabian StyleTran Anh, Dung, and Thang Nguyen Trong. 2018. "Adaptive Controller of the Major Functions for Controlling a Drive System with Elastic Couplings" Energies 11, no. 3: 531. https://doi.org/10.3390/en11030531
APA StyleTran Anh, D., & Nguyen Trong, T. (2018). Adaptive Controller of the Major Functions for Controlling a Drive System with Elastic Couplings. Energies, 11(3), 531. https://doi.org/10.3390/en11030531