Identification of the Most Effective Point of Connection for Battery Energy Storage Systems Focusing on Power System Frequency Response Improvement


Abstract
:1. Introduction
- A systematic approach to identifying the most effective point of connection for a BESS aiming the power system frequency response;
- Different from other works presented in literature, in this paper, the studies are carried out using full models;
- All the obtained results are based on linear models.
2. BESS Generic Model
2.1. Model Development
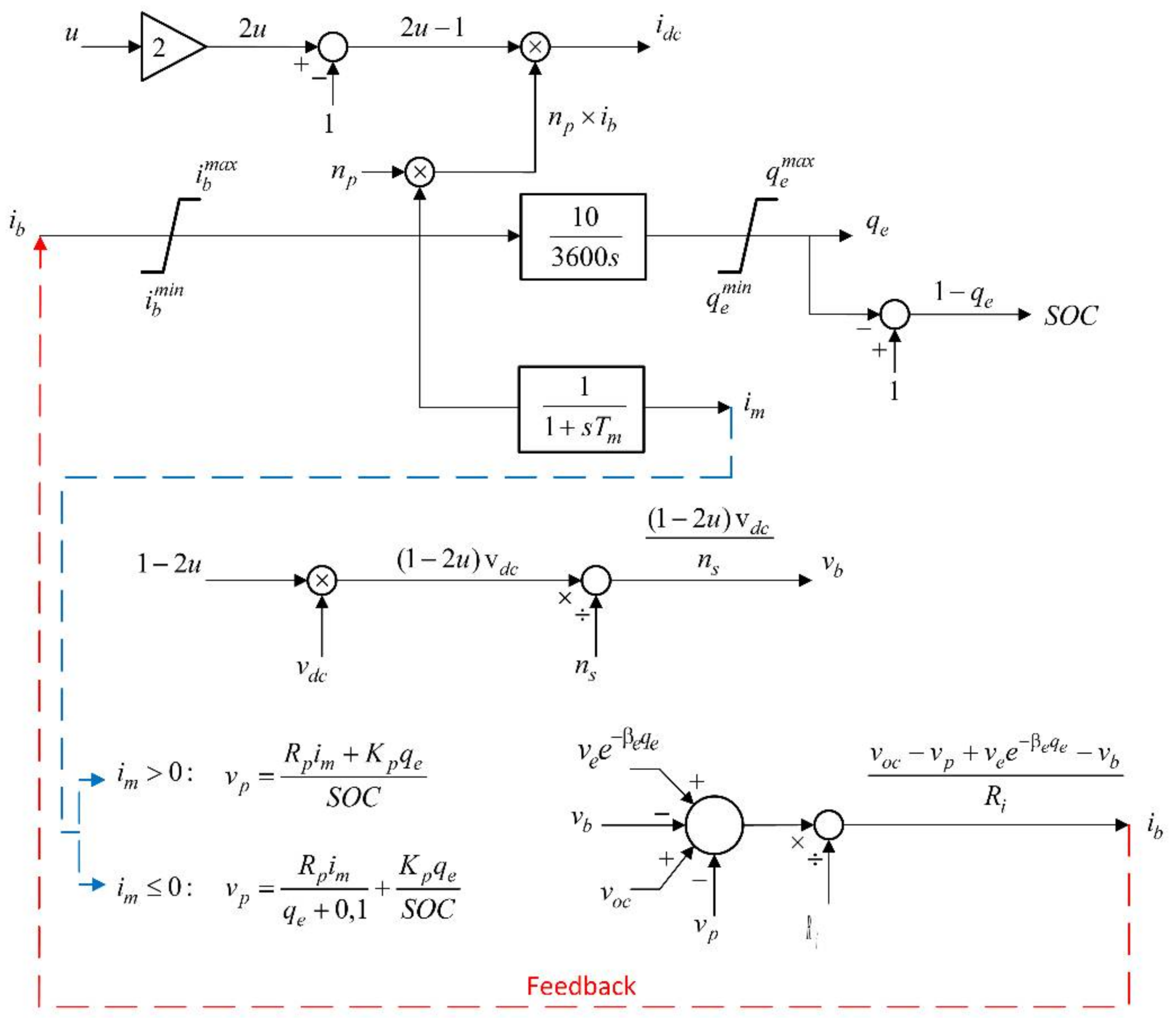
2.1.1. Battery Control Block
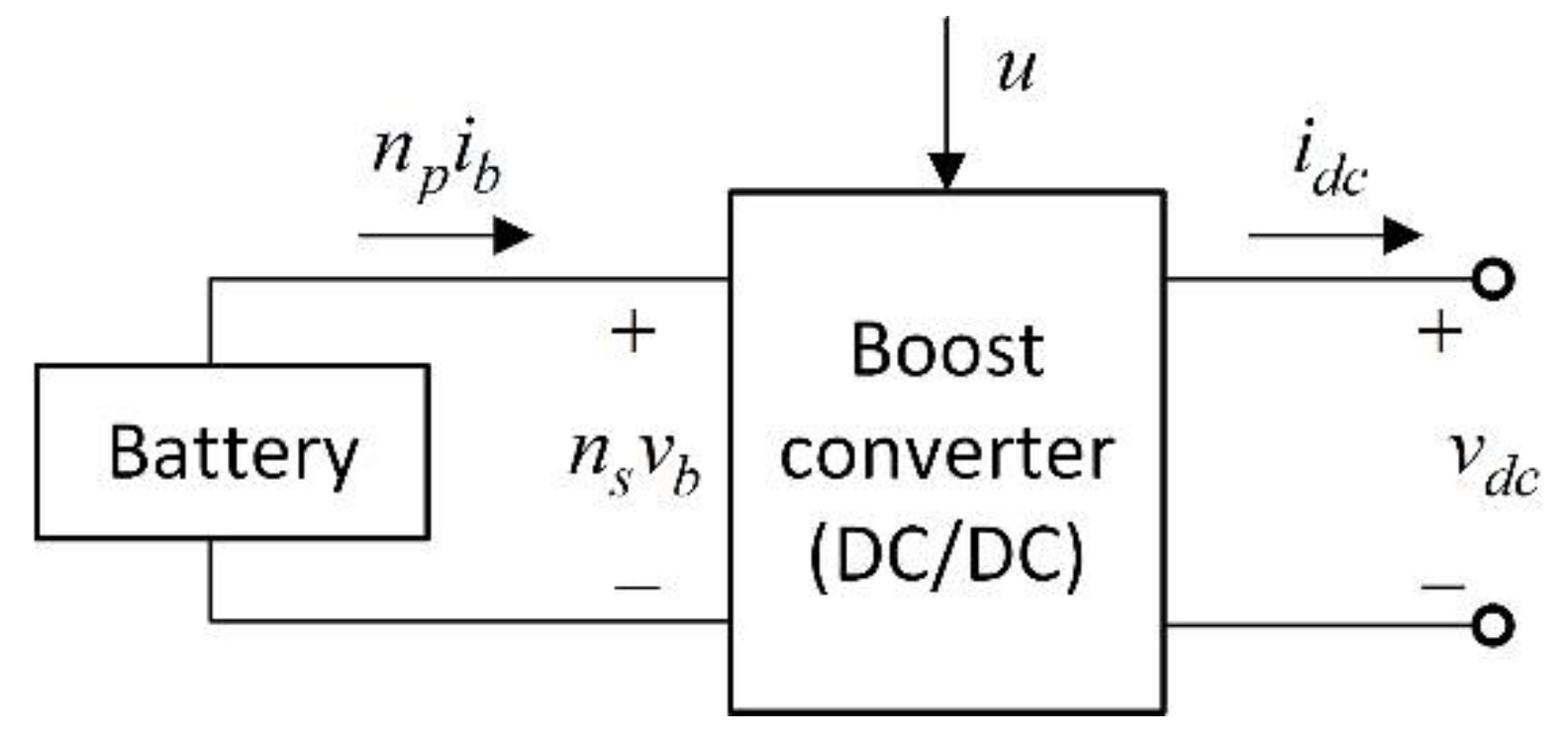
2.1.2. Battery Block
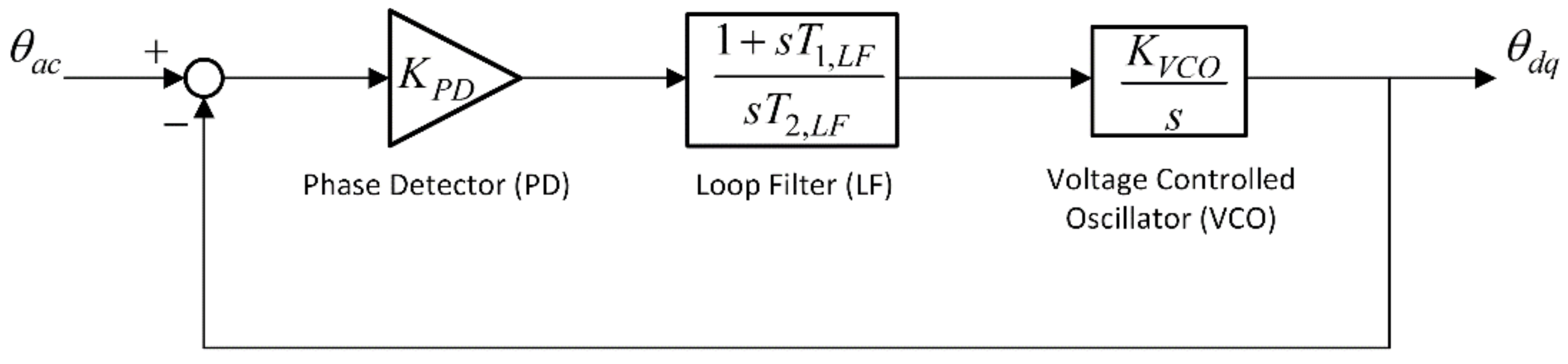
2.1.3. Voltage Source Converter Control Block
2.1.4. Voltage Source Converter Block
3. Test System for a Case Study
4. Methodology
4.1. Preliminary
4.2. Proposed Approach
4.2.1. Step (I): Identification of Frequency Regulation Modes and Selection of Interest Mode
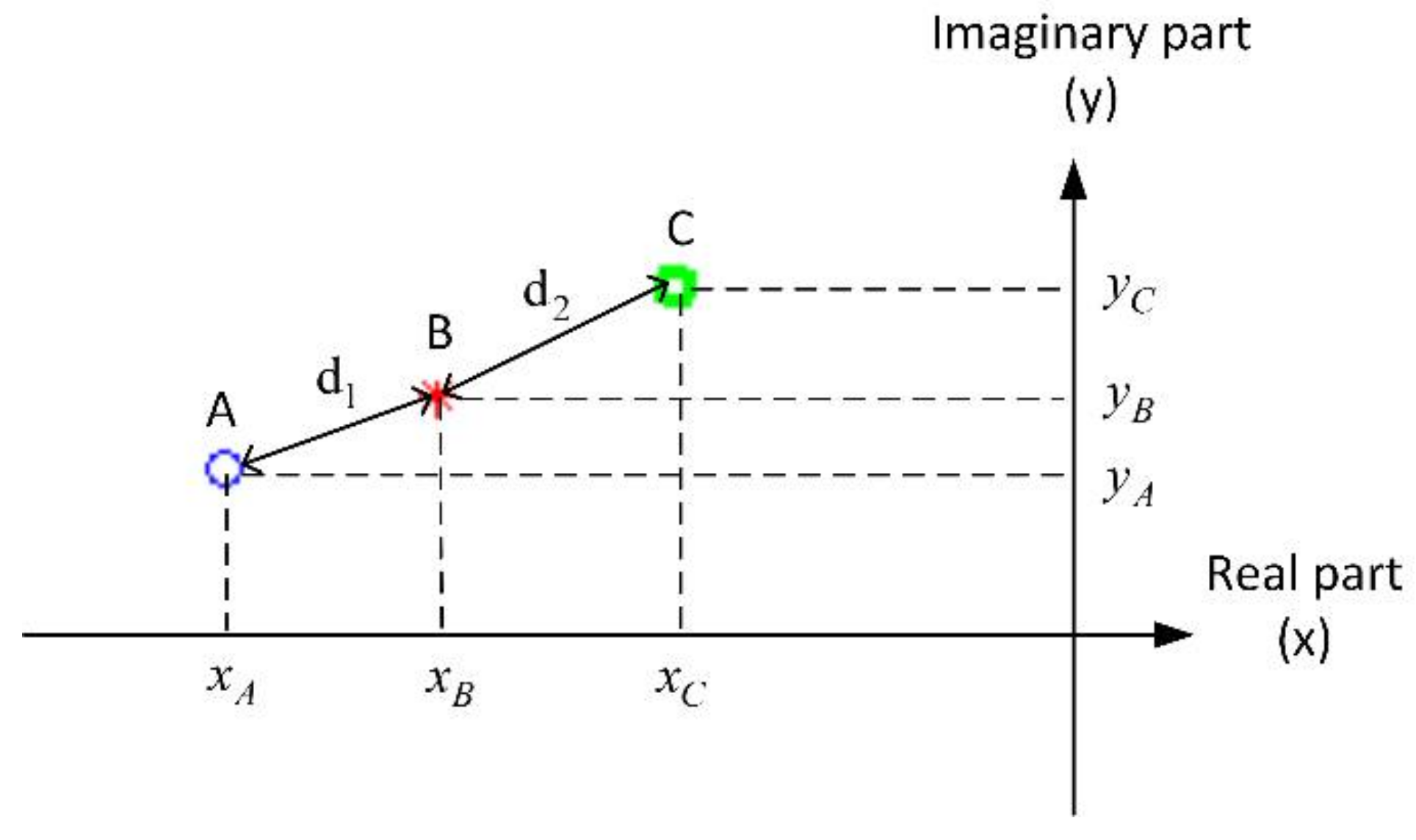
4.2.2. Step (II): Controllability Analysis of Selected Mode
4.3. Algorithm
- Obtain the power system linear model;
- Check to if there is already BESS devices installed in the system. The bus with a BESS device already installed is not considered as a candidate bus;
- Select a set of candidate buses (Bc) and the maximum number of BESS devices (n = 1, 2,…, nd) that will be installed;
- while n ≤ nd
- Variate the droop of generators and BESS (if it is already in the system);
- Select the oscillation mode with the maximum variation (frequency regulation mode);
- Estimate the controllability using geometric measures;
- The BESS must be installed on the bus with the maximum controllability;
- Remove the selected bus from the set from candidate buses and decrease the number of BESS devices;
- end
- Time domain nonlinear simulation is validating the results (optional).
5. Application Results
5.1. Allocation of the First BESS
5.1.1. Step (I): Identification of Frequency Regulation Modes and Selection of Interest Mode
5.1.2. Step (II): Controllability Analysis of Selected Mode
5.1.3. Validation of Results through Nonlinear Simulations
- (a)
- Case 1: Addition of 200 MW in load bus 7, at the instant of 1 s;
- (b)
- Case 2: Addition of 200 MW in load bus 9, at the instant of 1 s.
- (a)
- Case 1: Addition of 200 MW in load bus 7, at the instant of 1 s
- (b)
- Case 2: Addition of 200 MW in load bus 9, at the instant of 1 s
5.2. Allocation of the Second BESS
5.2.1. Step (I): Identification of Frequency Regulation Modes and Selection of Interest Mode
5.2.2. Step (II): Controllability Analysis of Selected Mode
5.2.3. Validation of Results through Nonlinear Simulations
- (a)
- Case 1: Addition of 200 MW in load bus 7, at the instant of 1 s
- (b)
- Case 2: Addition of 200 MW in load bus 9, at the instant of 1 s
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid | AVR | PSS |
|---|---|---|
| Sbase = 100 MVA f0 = 60 Hz Trigger = 1 | Vref (p.u.): G1 = 1.063 G2 = 1.047 G3 = 1.0393 Tr (s) = 0.01 Ta (s) = 1 Tb (s) = 2 Ka (p.u.): G1 = 50 G2 = 50 G3 = 200 | Ks (p.u.) = 20 Tw (s) = 10 T1 (s) = 0.05 T2 (s) = 0.02 T3 (s) = 3 T4 (s) = 5.4 |
| Synchronous Generators | Wind Farm |
|---|---|
| Tm0 (p.u.): G1 = 7.0001 | wind speed—vw (m/s) = 14 |
| G2 = 7.0001 | Inertia constant—Ht (s) = 4.33 |
| G3 = 7.0053 | Inertia constant—Hg (s) = 0.62 |
| Steam Turbine: | Impedances: |
| Constant droop—Rp (p.u.) = 0.0043 | Ra_wind (p.u.) = 0 |
| tg (s) = 0.2 | Lpp_wind (p.u.) = 0.8 |
| Fhp (s) = 0.3 | - |
| Tch (s) = 0.3 | |
| Trh (s) = 7.0 |
| Bus Number | Voltage (p.u.) | θ (degrees) | Active Power (P) (p.u.) | Reactive Power (Q) (p.u.) | Pload (p.u.) | Qload (p.u.) | Qshunt (p.u.) | Bus Type (1-Vθ, 2-PV, 3-PQ) |
|---|---|---|---|---|---|---|---|---|
| 1 | 1.03 | −6.8313 | 7 | 1.288 | 0 | 0 | 0 | 2 |
| 2 | 1.01 | −16.4508 | 7 | 0.9917 | 0 | 0 | 0 | 2 |
| 3 | 1.03 | −6.8 | 7.0051 | 1.2899 | 0 | 0 | 0 | 1 |
| 4 | 1.01 | −16.432 | 7 | 0.9935 | 0 | 0 | 0 | 2 |
| 5 | 1.0155 | −13.2352 | 0 | 0 | 0 | 0 | 0 | 3 |
| 6 | 1.0003 | −23.0815 | 0 | 0 | 0 | 0 | 0 | 3 |
| 7 | 1.0009 | −31.0777 | 0 | 0 | 13.69 | 1 | 3 | 3 |
| 8 | 1.0116 | −31.1313 | 0 | 0 | 0 | 0 | 0 | 3 |
| 9 | 1.0009 | −31.0623 | 0 | 0 | 13.69 | 1 | 3 | 3 |
| 10 | 1.0003 | −23.0628 | 0 | 0 | 0 | 0 | 0 | 3 |
| 11 | 1.0155 | −13.2087 | 0 | 0 | 0 | 0 | 0 | 3 |
| Line from | Line to | R (p.u.) | X (p.u.) | Bshunt (p.u.) | Tap |
|---|---|---|---|---|---|
| 1 | 5 | 0 | 0.0167 | 0 | 1 |
| 2 | 6 | 0 | 0.0167 | 0 | 1 |
| 3 | 11 | 0 | 0.0167 | 0 | 1 |
| 4 | 10 | 0 | 0.0167 | 0 | 1 |
| 5 | 6 | 0.0025 | 0.025 | 0.04375 | 0 |
| 6 | 7 | 0.001 | 0.01 | 0.0175 | 0 |
| 7 | 8 | 0.011 | 0.11 | 0.1925 | 0 |
| 7 | 8 | 0.011 | 0.11 | 0.1925 | 0 |
| 8 | 9 | 0.011 | 0.11 | 0.1925 | 0 |
| 8 | 9 | 0.011 | 0.11 | 0.1925 | 0 |
| 9 | 10 | 0.001 | 0.01 | 0.0175 | 0 |
| 10 | 11 | 0.0025 | 0.025 | 0.04375 | 0 |
| Parameter | Value |
|---|---|
| Rated apparent power (MVA) | 900 |
| Leakage reactance—xl (p.u.) | 0.2 |
| Armature resistante—Ra (p.u.) | 0.000025 |
| d-axis synchronous reactance—xd (p.u.) | 1.8 |
| d-axis transient reactance—x’d (p.u.) | 0.3 |
| d-axis subtransient reactance—x”d (pu) | 0.25 |
| d-axis open-circuit time constant—T’do (s) | 8 |
| d-axis open-circuit subtransient time constant—T”do (s) | 0.03 |
| q-axis sychronous reactance—x_q (pu) | 1.7 |
| q-axis transient reactance—x’_q (pu) | 0.55 |
| q-axis subtransient reactance—x”_q (pu) | 0.25 |
| q-axis open-circuit time constant—T’_qo (s) | 0.4 |
| q-axis open circuit subtransient time constant—T”_qo (s) | 0.05 |
| inertia constant—H (s) | G1 = 4.5 |
| G2 = 6.5 | |
| G3 = 6.175 | |
| damping coefficient—D (pu) | 0 |
References
- Chassin, D.P.; Huang, Z.; Donnelly, M.K.; Hassler, C.; Ramirez, E.; Ray, C. Estimation of WECC System Inertia Using Observed Frequency Transients. IEEE Trans. Power Syst. 2005, 20, 1190–1192. [Google Scholar] [CrossRef]
- Jimenez, J.D.L.; Ramırez, J.M.; David, F.M. Allocation of PMUs for power system-wide inertial frequency response estimation. The Institution of Engineering and Technology. IET Gener. Transm. Distrib. 2017, 11, 2902–2911. [Google Scholar] [CrossRef]
- European Network of Transmission System Operators for Electricity (ENTSO-E). Future System Inertia. Available online: https://www.entsoe.eu/Documents/Publications/SOC/Nordic/Nordic_report_Future_System_Inertia.pdf (accessed on 25 January 2018).
- Lugnani, L.; Dotta, D.; Ferreira, J.M.F.; Decker, I.C.; Chow, J.H. Frequency Response Estimation Following Large Disturbances using synchrophasors. IEEE Power Energy Soc. Gen. Meet. 2018, in press. [Google Scholar]
- Koller, M.; Borsche, T.; Ulbig, A.; Andersson, G. Review of grid applications with the Zurich 1 MW battery energy storage system. Electr. Power Syst. Res. 2015, 120, 28–135. [Google Scholar] [CrossRef]
- Schmutz, J. Primary Frequency Control Provided by Battery; EEH—Power Systems Laboratory, ETH Zürich: Zurich, Switzerland, 2013. [Google Scholar]
- Hollinger, R.; Diazgranados, L.M.; Wittwer, C.; Engel, B. Optimal Provision of Primary Frequency Control with Battery Systems by Exploiting all Degrees of Freedom within Regulation. Energy Procedia 2016, 99, 204–214. [Google Scholar] [CrossRef]
- Mégel, O.; Mathieu, J.L.; Andersson, G. Maximizing the Potential of Energy Storage to Provide Fast Frequency Control. In Proceedings of the 4th IEEE PES Innovative Smart Grid Technologies Europe (ISGT EUROPE), Copenhagen, Denmark, 6–9 October 2013. [Google Scholar]
- Kalyani, S.; Nagalakshmi, S.; Marisha, R. Load Frequency Control Using Battery Energy Storage System in Interconnected Power System. In Proceedings of the 2012 Third International Conference on Computing, Communication and Networking Technologies (ICCCNT), Coimbatore, India, 26–28 July 2012. [Google Scholar]
- Sen, U.; Kumar, N. Load Frequency Control with Battery Energy Storage System. In Proceedings of the 2014 International Conference on Power, Control and Embedded Systems (ICPCES), Allahabad, India, 26–28 December 2014. [Google Scholar]
- Chowdary, K.R.; Santhoshi, P.; Bhaskararao, S.; Anusha, T.; Devarao, S.V. Load Frequency Control of A Typical Two Area Interconnected Power System by Using Battery Energy Storage System. Int. J. Eng. Res. Appl. 2014, 4, 145–150. [Google Scholar]
- Mercier, P.; Cherkaoui, R.; Oudalov, A. Optimizing a Battery Energy Storage System for Frequency Control Application in an Isolated Power System. IEEE Trans. Power Syst. 2009, 24, 1469–1477. [Google Scholar] [CrossRef]
- Toge, M.; Kurita, Y.; Iwamoto, S. Supplementary Load Frequency Control with Storage Battery Operation Considering SOC under Large-scale Wind Power Penetration. In Proceedings of the IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013. [Google Scholar]
- Zhu, D.; Hug-Glanzmann, G. Coordination of storage and generation in power system frequency control using an H∞ approach. IET Gener. Transm. Distrib. 2013, 7, 1263–1271. [Google Scholar] [CrossRef]
- Wilches-Bernal, F.; Chow, H.; Sanchez-Gasca, J.J. A Fundamental Study of Applying Wind Turbines for Power System Frequency Control. IEEE Trans. Power Syst. 2016, 31, 1496–1505. [Google Scholar] [CrossRef]
- Ortega, A.; Milano, F. Generalized Model of VSC-Based Energy Storage Systems for Transient Stability Analysis. IEEE Trans. Power Syst. 2016, 31, 3369–3380. [Google Scholar] [CrossRef]
- Gatta, F.M. Application of a LiFePO4 Battery Energy Storage System to Primary Frequency Control: Simulations and Experimental Results. Energies 2016, 9, 887. [Google Scholar] [CrossRef]
- Knap, V.; Chaudhary, S.K.; Store, D.-I.; Swierczynski, M.; Craciun, B.-I.; Teodorescu, R. Sizing of an Energy Storage System for Grid Inertial Response and Primary Frequency Reserve. IEEE Trans. Power Syst. 2016, 31, 3447–3456. [Google Scholar] [CrossRef]
- Arita, M.; Yokoyama, A.; Tada, Y. Evaluation of Battery System for Frequency Control in Interconnected Power System with a Large Penetration of Wind Power Generation. In Proceedings of the International Conference on Power System Technology, Chongqing, China, 22–26 October 2006; pp. 1–7. [Google Scholar]
- Benini, M.; Canavese, S.; Cirio, D.; Gatti, A. Battery Energy Storage Systems for the Provision of Primary and Secondary Frequency Regulation in Italy. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 6–8 June 2016. [Google Scholar]
- Shankar, R.; Chatterjee, K.; Bhushan, R. Impact of energy storage system on load frequency control for diverse sources of the interconnected power system in deregulated power environment. Electr. Power Energy Syst. 2016, 79, 11–26. [Google Scholar] [CrossRef]
- Kerdphol, T.; Qudaih, Y.; Mitani, Y. Optimum battery energy storage system using PSO considering dynamic demand response for microgrids. Electr. Power Energy Syst. 2016, 83, 58–66. [Google Scholar] [CrossRef]
- Ortega, A.; Milano, F. Design of a Control Limiter to Improve the Dynamic Response of Energy Storage Systems. In Proceedings of the IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar]
- Kundur, P. Power System Stability, and Control; EPRI Power System Engineering Series; McGraw-Hill, Inc.: Riverside, CA, USA, 1994. [Google Scholar]
- Wilches-Bernal, F. Applications of Wind Generation for Power System Frequency Control, Inter-Area Oscillations Damping and Parameter Identification. Ph.D. Thesis, Rensselaer Polytechnic Institute, Troy, NY, USA, 2015. [Google Scholar]
- Motta, R.T.; Dotta, D. Representação Computacional de Parques Eólicos: Comparativo entre Modelos de Primeira e Segunda Geração; XXIV Seminário Nacional de Produção e Transmissão de Energia Elétrica—SNPTEE: Curitiba, Brazil, 2017. (In Portuguese) [Google Scholar]
- Clark, K.; Miller, N.W.; Sanchez-Gasca, J.J. Modeling of GE Wind Turbine-Generators for Grid Studies; GE Energy: Boston, MA, USA, 2009. [Google Scholar]
- Dotta, D. Controle Hierárquico Usando Sinais de Medição Fasorial Sincronizada. Ph.D. Thesis, Universidade Federal de Santa Catarina, Florianópolis, Brazil, 2009. (In Portuguese). [Google Scholar]
- Heniche, A.; Kamwa, I. Control loops selection to damp inter-area oscillations of electrical networks. IEEE Trans. Power Syst. 2002, 17, 378–384. [Google Scholar] [CrossRef]
- Júnior, S.S.D.S. Proposta e Avaliação de um Método Adaptativo de Corte de Carga. Master’s Thesis, UFRJ/COPPE, Rio de Janeiro, Brazil, 2017. (In Portuguese). [Google Scholar]
- Rudez, U.; Mihalic, R. Analysis of Underfrequency Load Shedding Using a Frequency Gradient. IEEE Trans. Power Deliv. 2011, 26, 565–575. [Google Scholar] [CrossRef]



















| Eigenvalue Group | Droop (1/Rp) = 100 (A) | Droop (1/Rp) = 232.5582 (B) | Droop (1/Rp) = 500 (C) | Distance between | ||||
|---|---|---|---|---|---|---|---|---|
| (A) and (B) | (B) and (C) | |||||||
| Real | Imag | Real | Imag | Real | Imag | Module | Module | |
| 1 | −0.5654 | ±7.9441 | −0.5320 | ±7.9771 | −0.4665 | ±8.0426 | 0.0469 | 0.0927 |
| 2 | −0.2443 | ±4.8949 | −0.2176 | ±4.9696 | −0.1630 | ±5.1121 | 0.0794 | 0.1526 |
| 3 | −2.3124 | ±2.1027 | −2.2860 | ±2.1793 | −2.2202 | ±2.2582 | 0.0810 | 0.1027 |
| 4 | −1.2941 | ±2.0030 | −1.1496 | ±2.1534 | −0.9527 | ±2.4835 | 0.2086 | 0.3843 |
| 5 | −2.6521 | ±0.3805 | −2.5460 | ±0.7549 | −2.4839 | ±1.0121 | 0.3892 | 0.2646 |
| Eigenvalues −2.5460 ± j0.7549 Controllability | |
|---|---|
| Input Signals | Index |
| Tm(1) | 0.000402 |
| Tm(2) | 0.000390 |
| Tm(3) | 0.000321 |
| Tm_wind | 0.000246 |
| Eigenvalue Group | Droop (1/Rp) = 100 (A) | Droop (1/Rp) = 232.5582 (B) | Droop (1/Rp) = 500 (C) | Distance between | ||||
|---|---|---|---|---|---|---|---|---|
| (A) and (B) | (B) and (C) | |||||||
| Real | Imag | Real | Imag | Real | Imag | Module | Module | |
| 1 | −1.1690 | ±8.0667 | −1.1316 | ±8.1030 | −1.0584 | ±8.1749 | 0.0521 | 0.1026 |
| 2 | −0.5319 | ±4.9883 | −0.4975 | ±5.0667 | −0.4290 | ±5.2145 | 0.0856 | 0.1629 |
| 3 | −1.7123 | ±2.5085 | −1.6593 | ±2.6669 | −1.4709 | ±2.9954 | 0.1670 | 0.3787 |
| 4 | −2.3277 | ±2.4325 | −2.2285 | ±2.4182 | −2.1466 | ±2.3593 | 0.1002 | 0.1009 |
| 5 | - | - | −2.2147 | ±0.5018 | −2.1862 | ±0.9291 | - | 0.4283 |
| 6 | −1.4790 | ±0.1816 | −1.3885 | 0.0000 | −1.3164 | 0.0000 | 0.2029 | 0.0721 |
| Eigenvalues −2.2147 ± j0.5018 Controllability | |
|---|---|
| Input Signals | Index |
| Tm_wind | 0.000638 |
| Tm(3) | 0.000474 |
| Tm(2) | 0.000307 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pieroni, T.; Dotta, D. Identification of the Most Effective Point of Connection for Battery Energy Storage Systems Focusing on Power System Frequency Response Improvement. Energies 2018, 11, 763. https://doi.org/10.3390/en11040763
Pieroni T, Dotta D. Identification of the Most Effective Point of Connection for Battery Energy Storage Systems Focusing on Power System Frequency Response Improvement. Energies. 2018; 11(4):763. https://doi.org/10.3390/en11040763
Chicago/Turabian StylePieroni, Thiago, and Daniel Dotta. 2018. "Identification of the Most Effective Point of Connection for Battery Energy Storage Systems Focusing on Power System Frequency Response Improvement" Energies 11, no. 4: 763. https://doi.org/10.3390/en11040763
APA StylePieroni, T., & Dotta, D. (2018). Identification of the Most Effective Point of Connection for Battery Energy Storage Systems Focusing on Power System Frequency Response Improvement. Energies, 11(4), 763. https://doi.org/10.3390/en11040763