Reconstruction of Hydraulic Fractures Using Passive Ultrasonic Travel-Time Tomography


Abstract
:1. Introduction
2. Methodology
2.1. Forward Modelling
2.2. Inversion
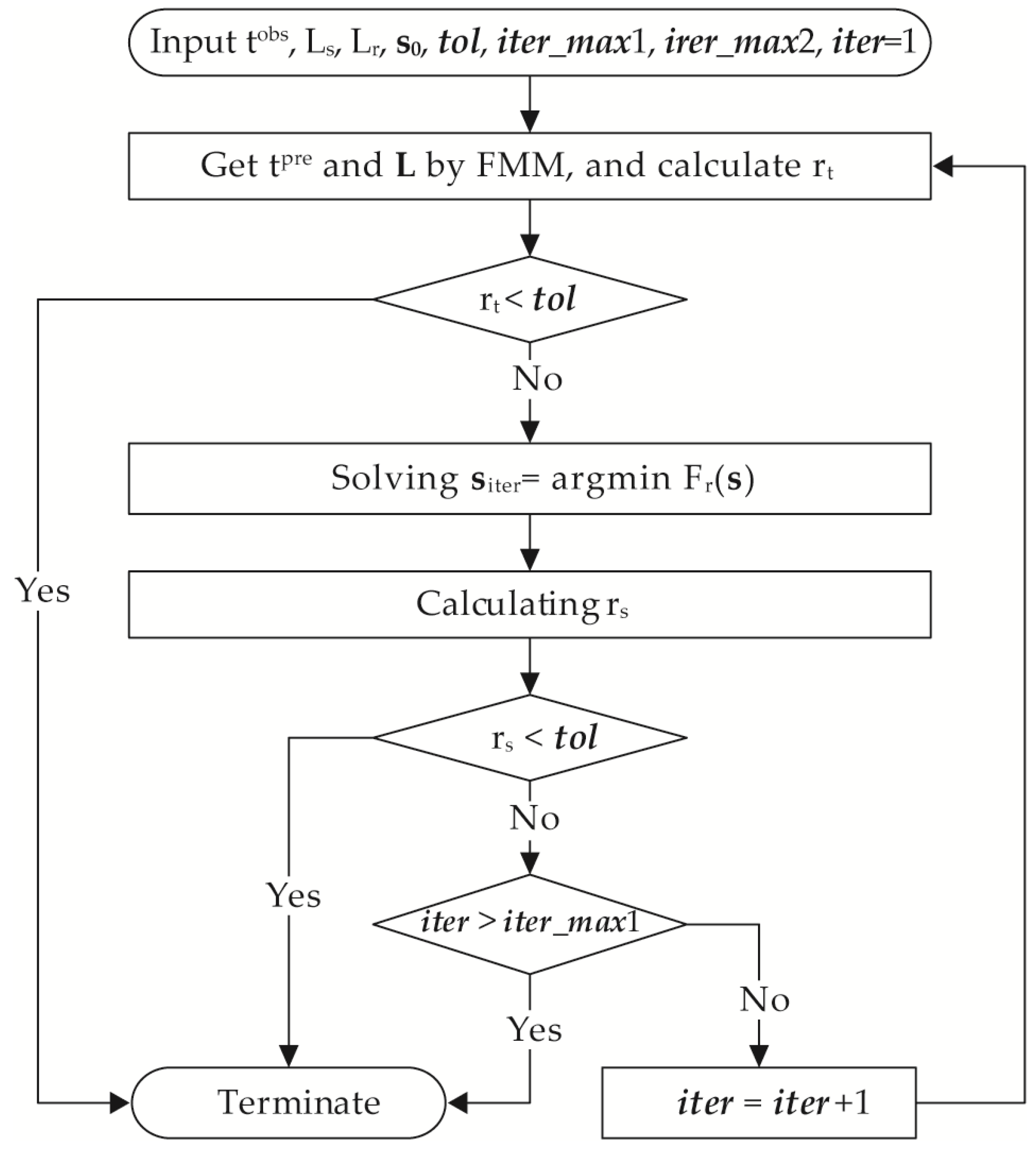
- Input observed data () and the positions of the sources (Ls) and receivers (Lr) and make an initial guess for the slowness (). Set the tolerance (tol), maximum iteration numbers (iter_max1) of ray-tracing, maximum iteration numbers (iter_max2) of regularization inversion, and the initial counter of iteration (iter) to 1.
- Calculate predicted travel time () and construct the L Matrix by FMM for the initial velocity or updated velocity model.
- Calculate the root-mean-square (RMS, Equation (7)) value of . If is less than tol, terminate, else, go to next step:
- Solve the regularization problem .
- Calculate the RMS value of . If is less than tol, stop, else, go to next step.
- Set iter = iter + 1. If iter > iter_max1, stop, else, go to step 2.
- Terminate.
3. Numerical Simulation
3.1. Constructing a Velocity Model
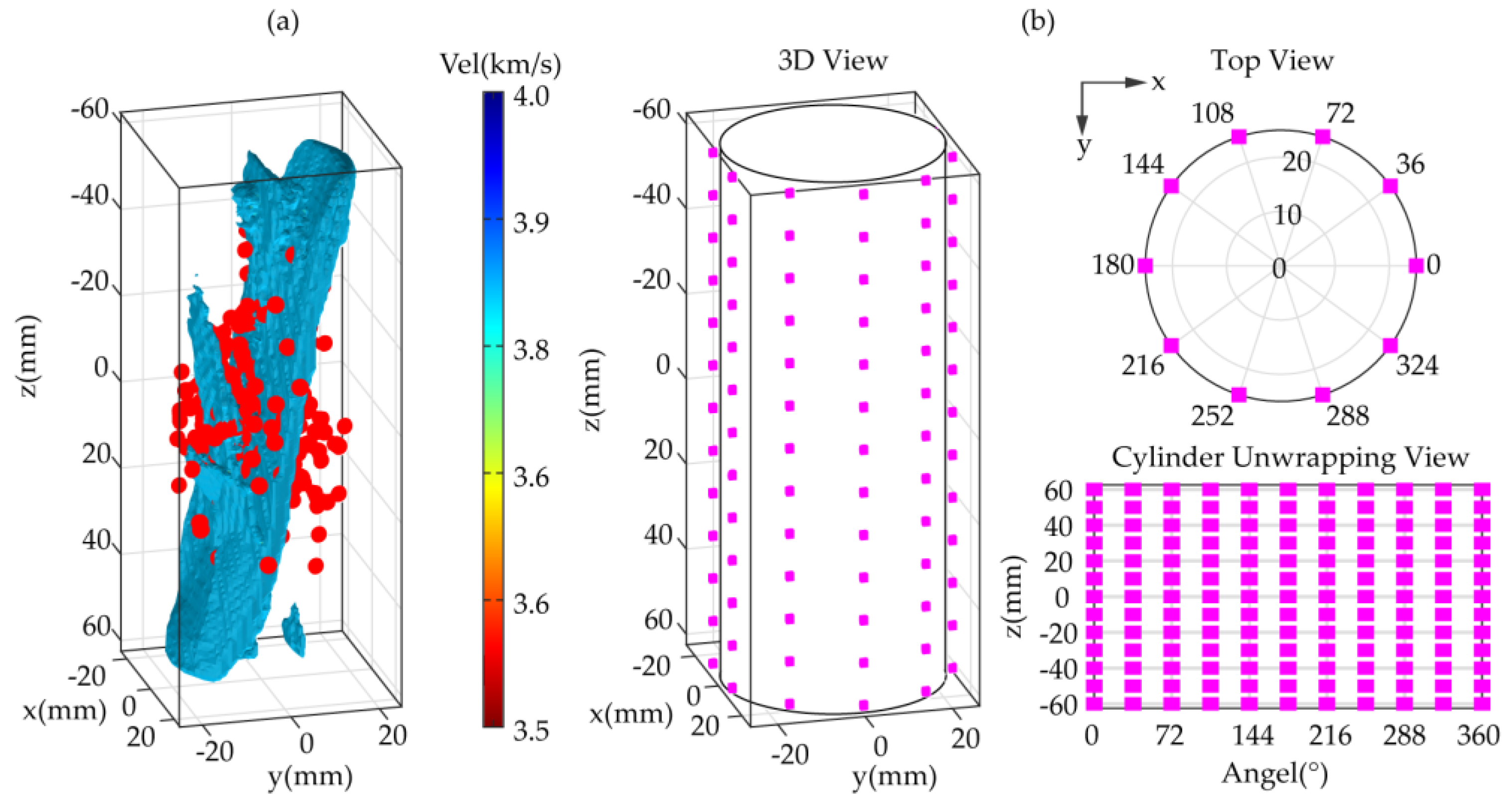
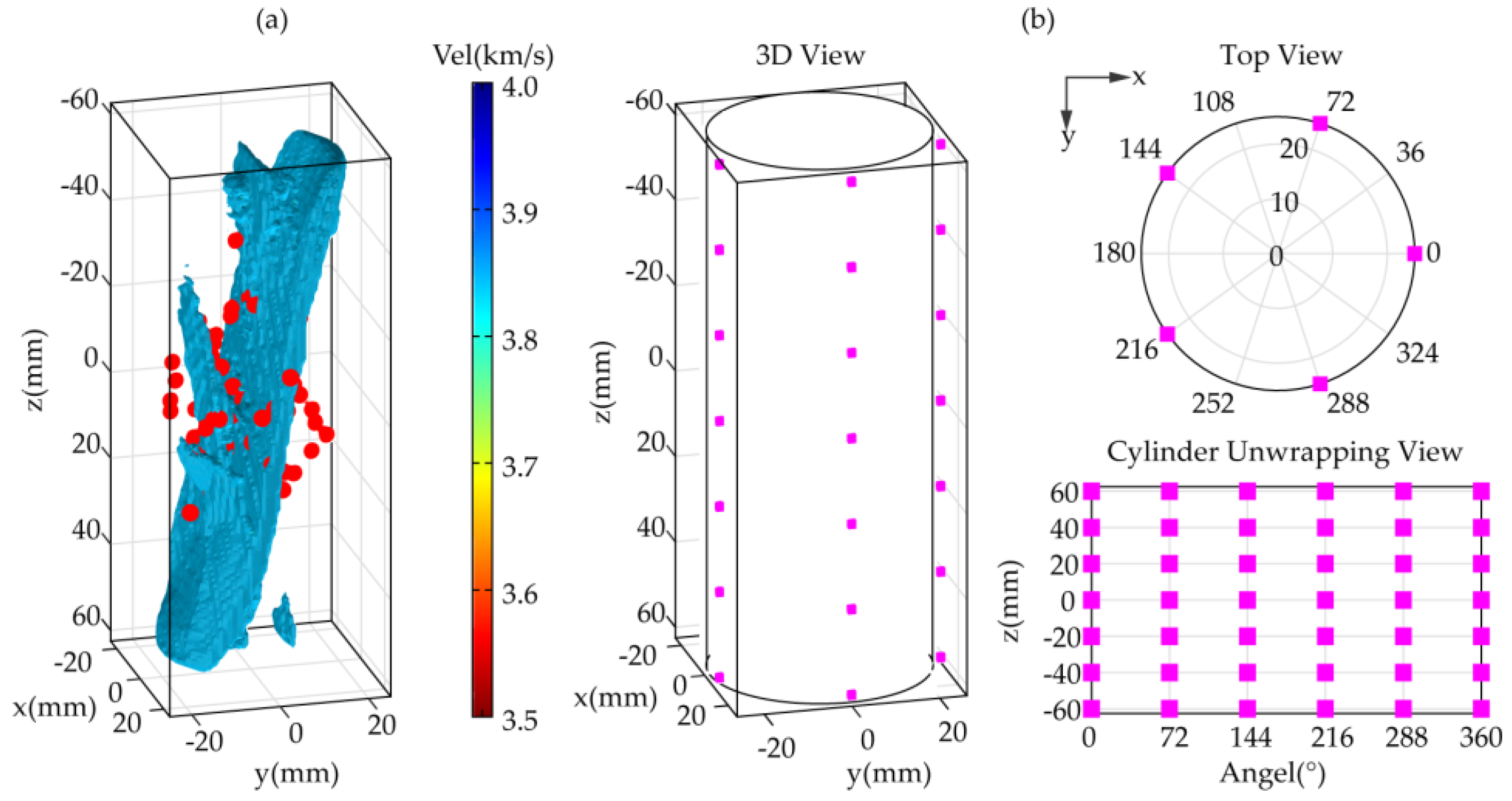
3.2. Observation Geometry
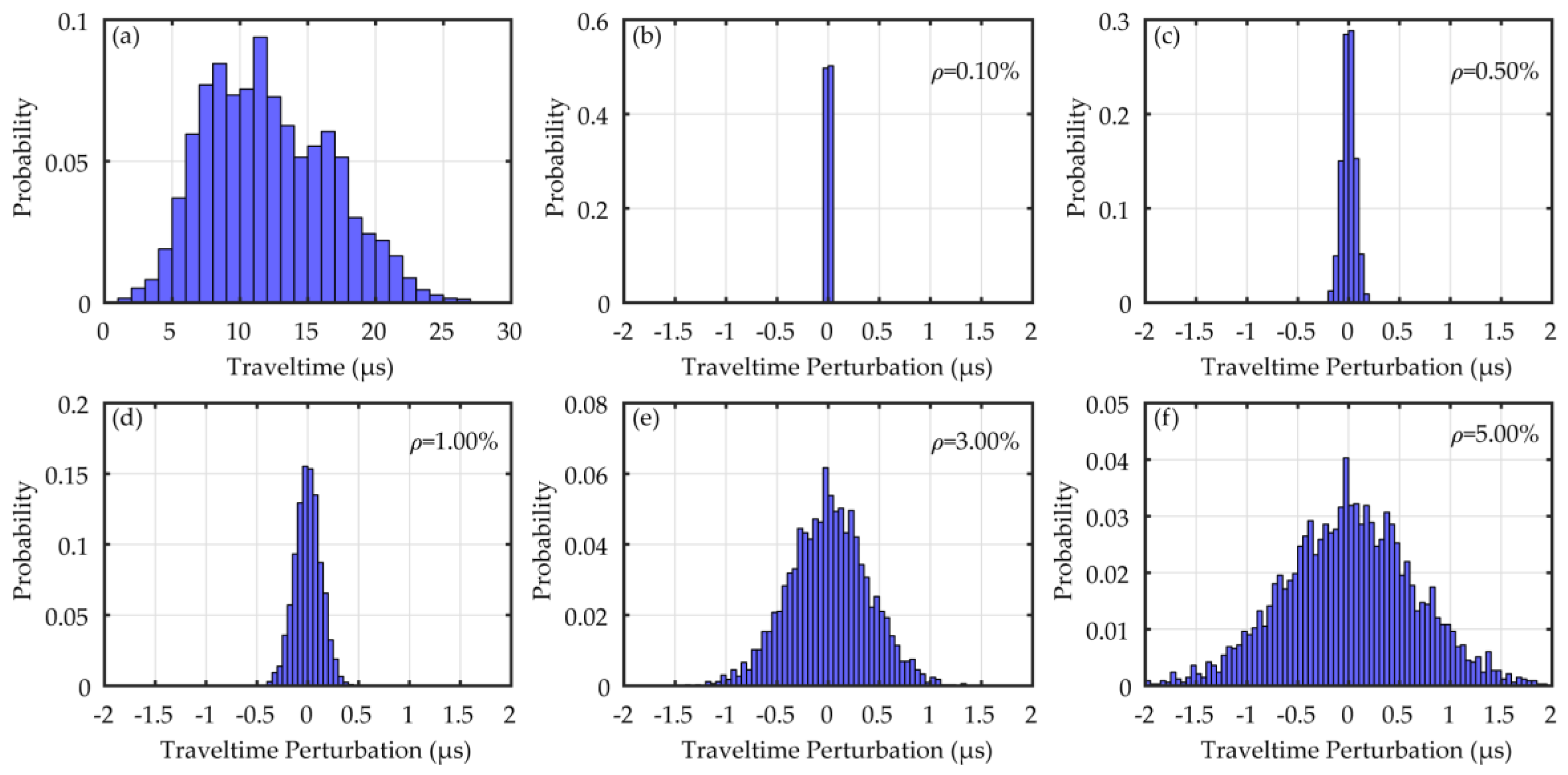
3.3. Simulated Observed Travel-Time
4. Results and Discussion
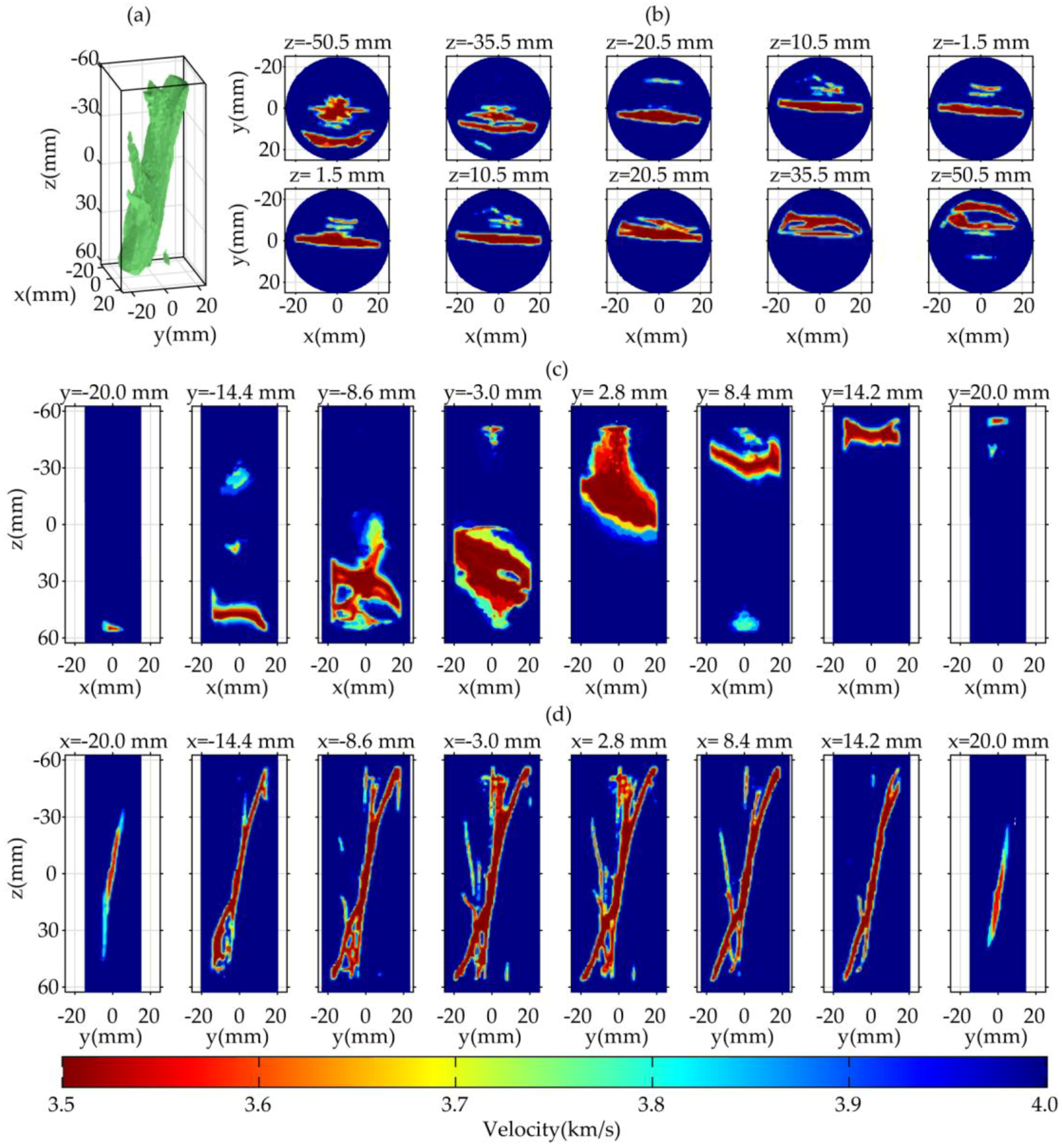
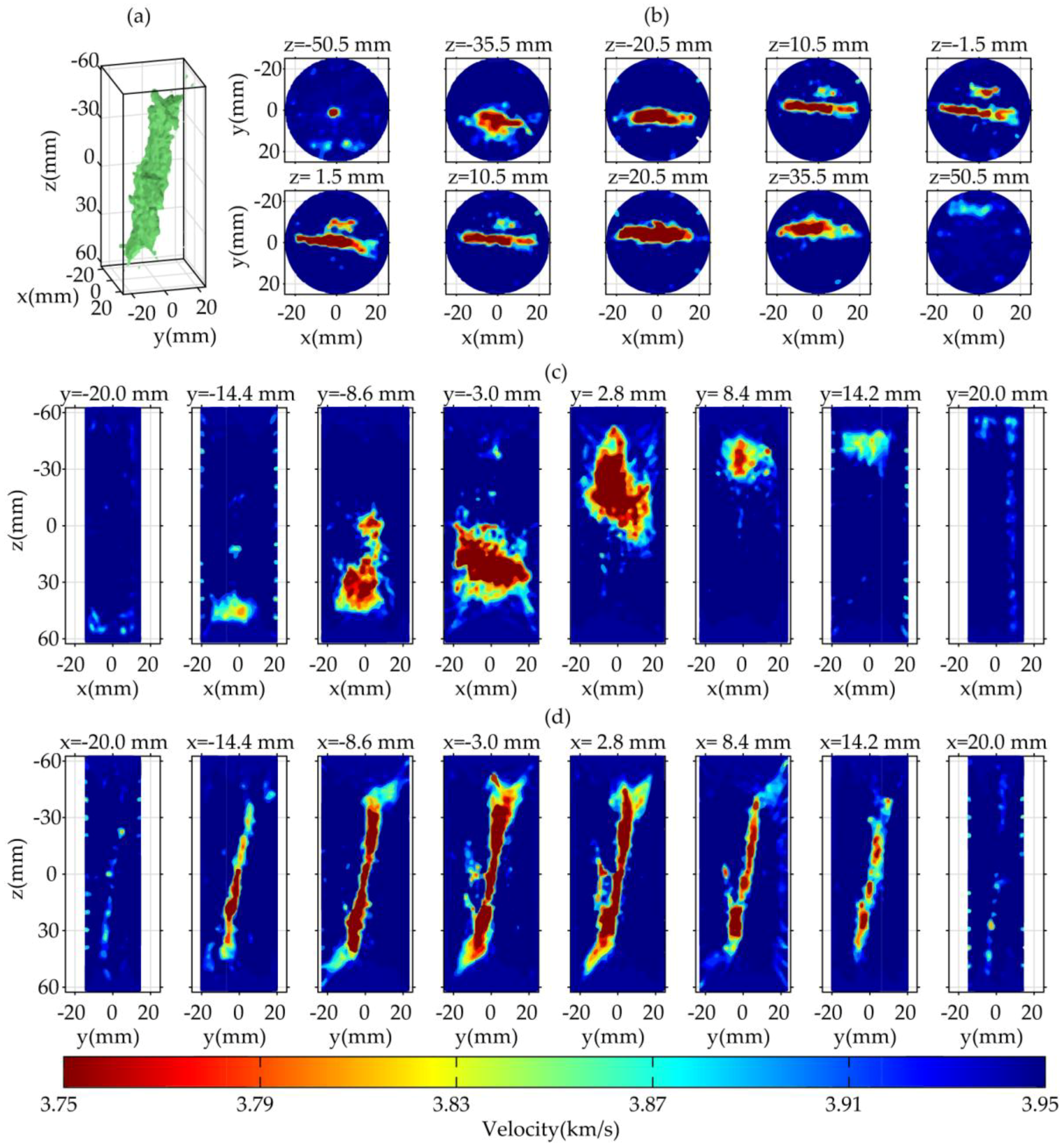
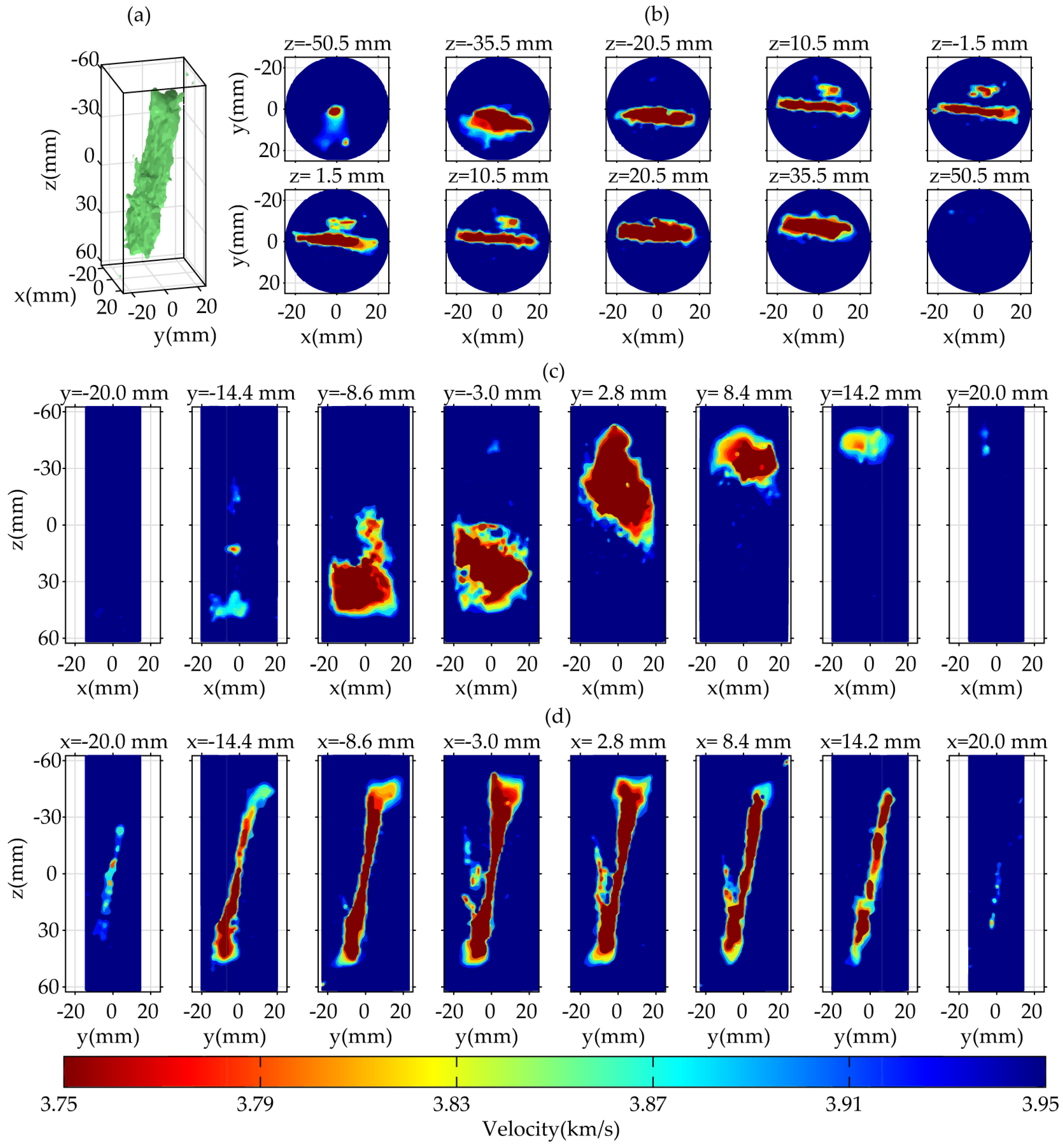
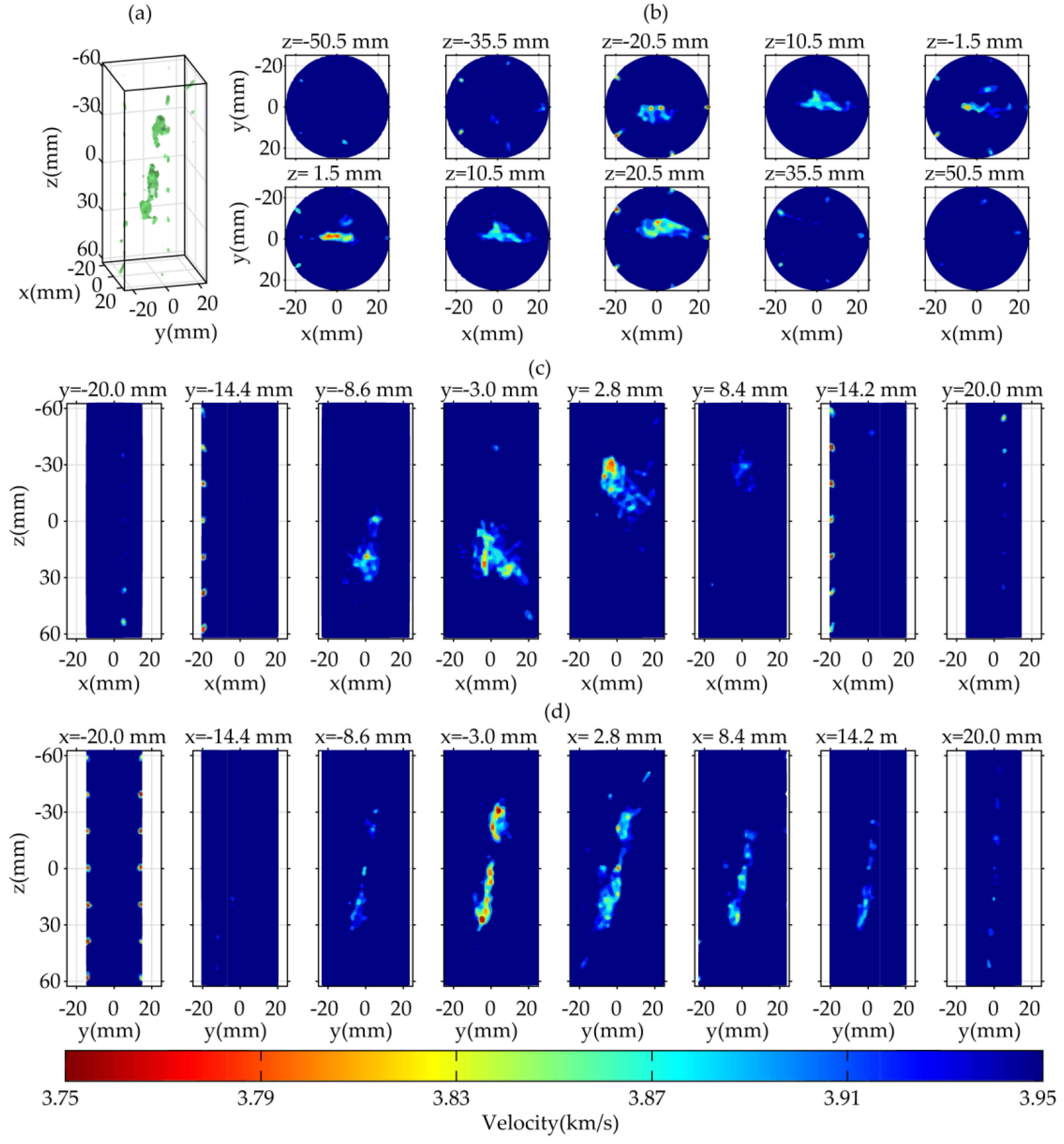
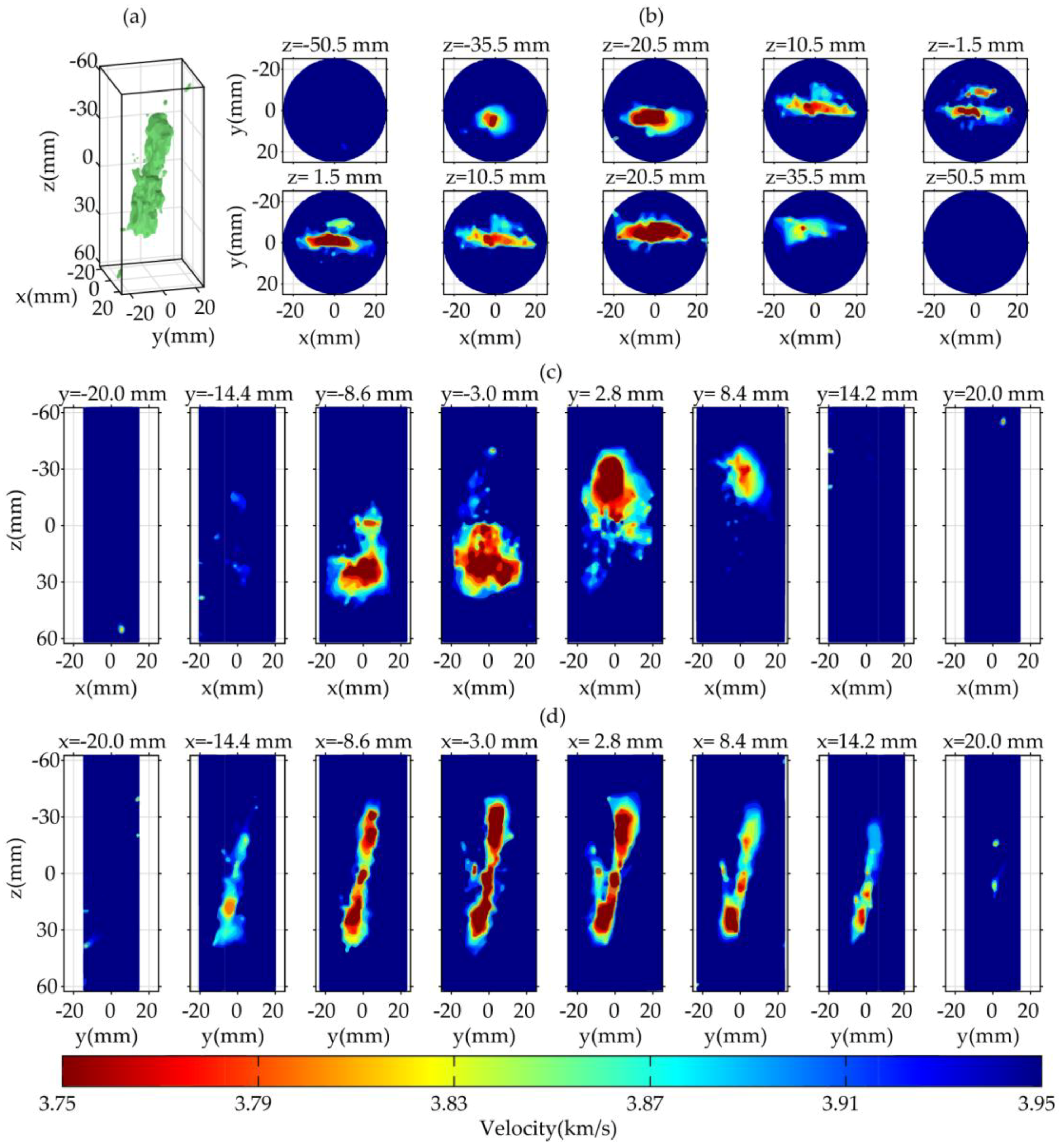
4.1. Tomographic Images
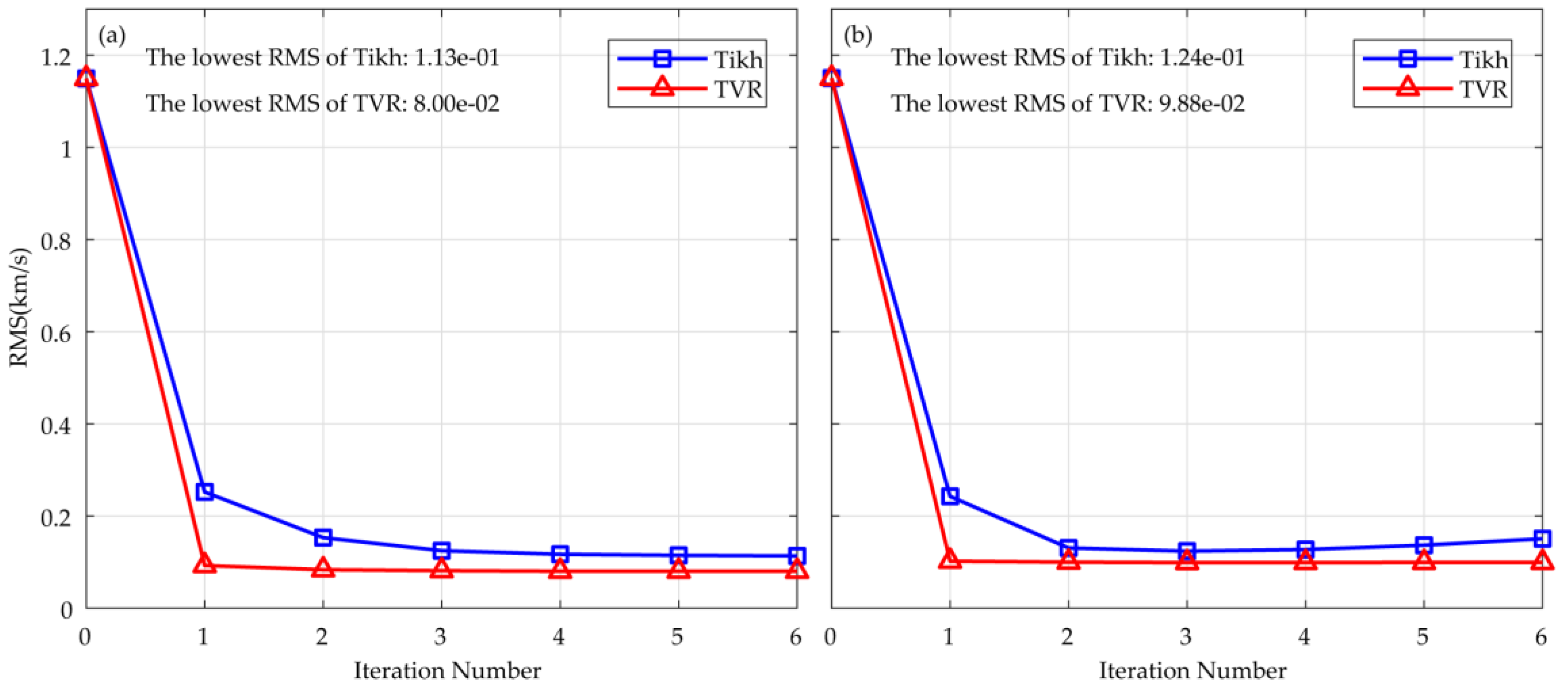
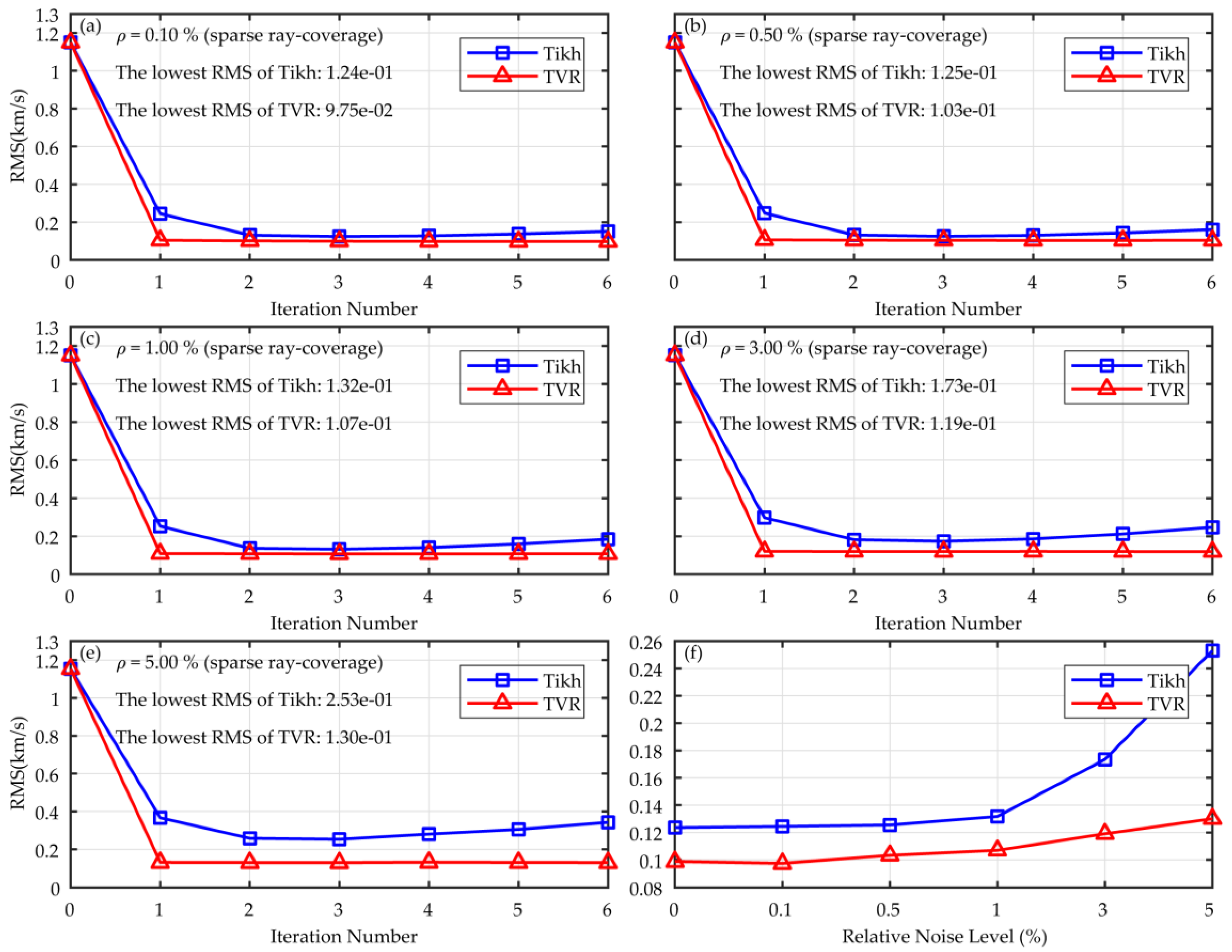
4.2. Errors Analysis
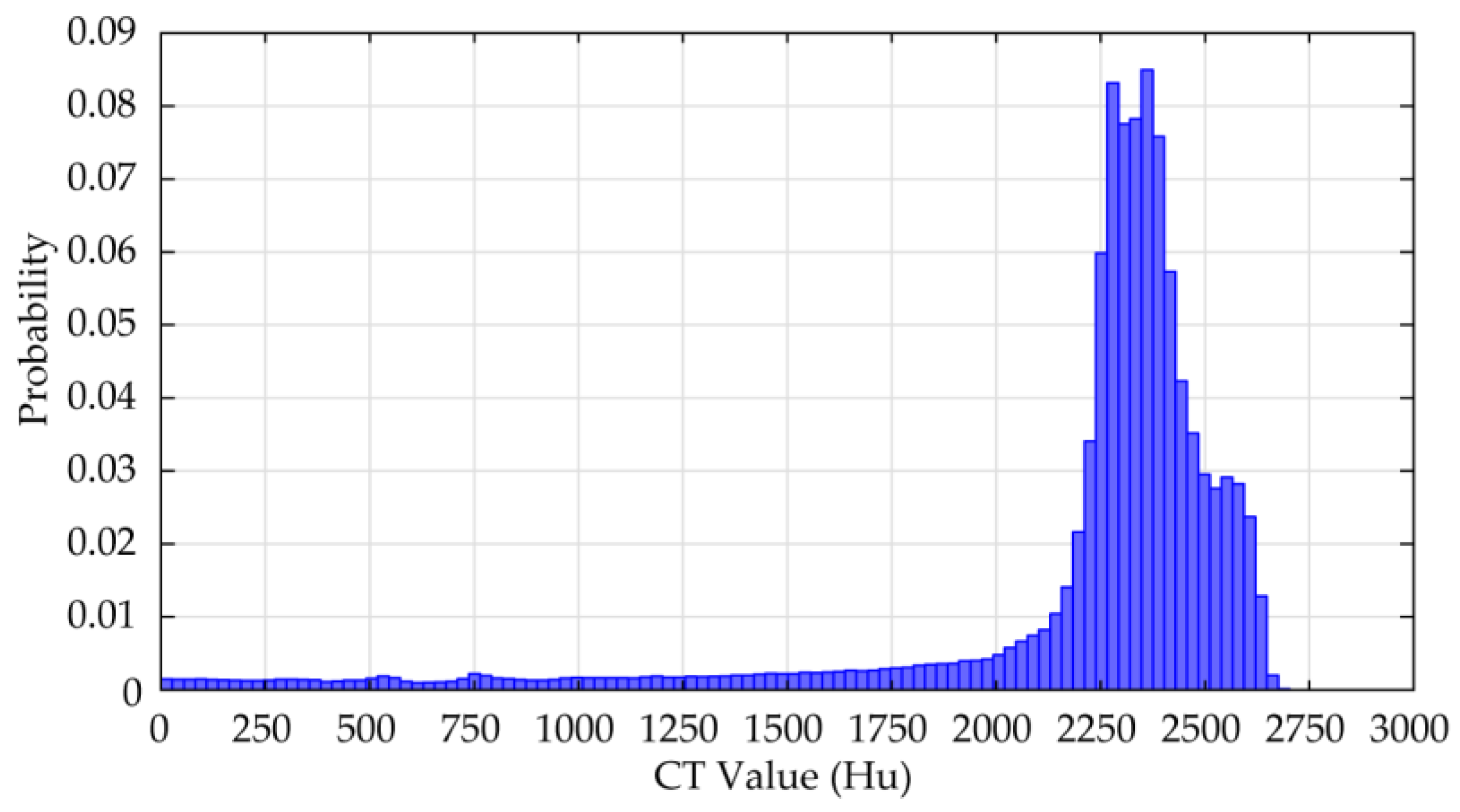
4.3. Comparison with the X-CT
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Chitrala, Y.; Moreno, C.; Sondergeld, C.H.; Rai, C.S. Microseismic Mapping of Laboratory Induced Hydraulic Fractures in Anisotropic Reservoirs. In Proceedings of the SPE Tight Gas Completions Conference, San Antonio, TX, USA, 2–3 November 2010. [Google Scholar]
- Benson, P.M.; Thompson, B.D.; Meredith, P.G.; Vinciguerra, S.; Young, R.P. Imaging slow failure in triaxially deformed Etna basalt using 3D acoustic-emission location and X-ray computed tomography. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef]
- Krilov, Z.; Goricnik, B. SPE 36879 A Study of Hydraulic Fracture Orientation by X-ray Computed Tomography. In Proceedings of the SPE European Petroleum Conference, Milan, Italy, 22–24 October 1996. [Google Scholar]
- Martínez-Martínez, J.; Fusi, N.; Galiana-Merino, J.J.; Benavente, D.; Crosta, G.B. Ultrasonic and X-ray computed tomography characterization of progressive fracture damage in low-porous carbonate rocks. Eng. Geol. 2016, 200, 47–57. [Google Scholar] [CrossRef]
- Otani, J.; Mukunoki, T.; Obara, Y. Application of X-ray CT method for characterization of failure in soils. Soils Found. Jpn. Geotech. Soc. 2000, 40, 111–118. [Google Scholar] [CrossRef]
- Falls, S.D.; Young, R.P.; Carlson, S.R.; Chow, T. Ultrasonic tomography and acoustic emission in hydraulically fractured Lac du Bonnet Grey granite. J. Geophys. Res. 1992, 97, 6867–6884. [Google Scholar] [CrossRef]
- Mitra, R. Imaging of Stress in Rock Samples Using Numerical Modeling and Laboratory Tomography. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2006. [Google Scholar]
- Charalampidou, E.-M. Experimental Study of Localised Deformation in Porous Sandstones. Ph.D. Thesis, Heriot Watt University, Edinburg, UK, 2011. [Google Scholar]
- Tudisco, E. Development and Application of Time-Lapse Ultrasonic Tomography for Laboratory Characterisation of Localised Deformation in Hard Soils/Soft Rocks. In Proceedings of the 16th International Conference on Experimental Mechanics, Lund University, Lund, Sweden, 7–11 July 2014. [Google Scholar]
- Lei, X.; Xue, Z. Ultrasonic velocity and attenuation during CO2 injection into water-saturated porous sandstone: Measurements using difference seismic tomography. Phys. Earth Planet. Inter. 2009, 176, 224–234. [Google Scholar] [CrossRef]
- Shiotani, T.; Osawa, S.; Kobayashi, Y. Application of 3D AE Tomography for Triaxial Tests of Rocky Specimens. In Proceedings of the European Working Group on Acoustic Emission, Dresden, Germany, 3–5 September 2014; pp. 1–9. [Google Scholar]
- Yang, T.; Westman, E.C.; Slaker, B.; Ma, X.; Hyder, Z.; Nie, B. Passive tomography to image stress redistribution prior to failure on granite. Int. J. Min. Reclam. Environ. 2015, 29, 178–190. [Google Scholar] [CrossRef]
- Jerri, A.J. The Shannon Sampling Theorem—Its Various Extensions and Applications: A Tutorial Review. Proc. IEEE 1977, 65, 1565–1596. [Google Scholar] [CrossRef]
- Daigle, M.; Fratta, D.; Wang, L.B. Ultrasonic and X-ray Tomographic Imaging of Highly Contrasting Inclusions in Concrete Specimens. In Proceedings of the GeoFrontier 2005 Conference, Austin, TX, USA, 24–26 July 2005; pp. 1–12. [Google Scholar]
- Lei, X.; Ma, S. Laboratory acoustic emission study for earthquake generation process. Earthq. Sci. 2014, 27, 627–646. [Google Scholar] [CrossRef]
- Lin, Y.; Syracuse, E.M.; Maceira, M.; Zhang, H.; Larmat, C. Double-difference traveltime tomography with edge-preserving regularization and a priori interfaces. Geophys. J. Int. 2015, 201, 574–594. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Arsenin, V.Y. Solutions of Ill-Posed Problems; Fritz Jhon, Ed.; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 1977. [Google Scholar]
- Donoho, D.L. Compressed Sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Lin, Y.; Huang, L.; Zhang, Z. Ultrasound waveform tomography with the total-variation regularization for detection of small breast tumors. In Proceedings of the SPIE, San Diego, CA, USA, 24 February 2012. [Google Scholar]
- Jiang, W.; Zhang, J. First-arrival traveltime tomography with modified total-variation regularization. Geophys. Prospect. 2017, 65, 1138–1154. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, J. Model regularization for seismic traveltime tomography with an edge-preserving smoothing operator. J. Appl. Geophys. 2017, 138, 143–153. [Google Scholar] [CrossRef]
- Neumann-Denzau, G.; Behrens, J. Inversion of seismic data using tomographical reconstruction techniques for investigations of laterally inhomogeneous media. Geophys. J. Int. 1984, 79, 305–315. [Google Scholar] [CrossRef]
- Sethian, J.A. Fast Marching Methods. SIAM Rev. 1999, 41, 199–235. [Google Scholar] [CrossRef]
- Jensen, T.L.; Jørgensen, J.H.; Hansen, P.C.; Jensen, S.H. Implementation of an optimal first-order method for strongly convex total variation regularization. BIT Numer. Math. 2012, 52, 329–356. [Google Scholar] [CrossRef]
- Hansen, P.C.; O’Leary, D.P. The use of the L-curve in the regularization of discrete ill-posed problems. SIAM J. Sci. Comput. 1993, 14, 1487–1503. [Google Scholar] [CrossRef]
- Zhai, H.; Chang, X.; Wang, Y.; Xue, Z.; Lei, X.; Zhang, Y. Sensitivity analysis of seismic velocity and attenuation variations for longmaxi shale during hydraulic fracturing testing in laboratory. Energies 2017, 10, 1393. [Google Scholar] [CrossRef]
- Martins, J.L.; Soares, J.A.; Silva, J.C. Da Ultrasonic travel-time tomography in core plugs. J. Geophys. Eng. 2007, 4, 117–127. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage | Current | Slice Thickness | Pixel Spacing | Pixel Matrix Size |
|---|---|---|---|---|
| 135 kV | 150 mA | 0.5 mm | 0.108 mm | 512 pixels × 512 pixels |
| RNL(%) | SSIMt | SSIMtv |
|---|---|---|
| 0 (dense case) | 0.1524 | 0.1878 |
| 0 (sparse case) | 0.1269 | 0.1663 |
| 0.1 | 0.1263 | 0.1704 |
| 0.5 | 0.1268 | 0.1574 |
| 1 | 0.1211 | 0.1498 |
| 3 | 0.0985 | 0.1287 |
| 5 | 0.0904 | 0.1183 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Chang, X.; Wang, Y.; Zhai, H.; Yao, Z. Reconstruction of Hydraulic Fractures Using Passive Ultrasonic Travel-Time Tomography. Energies 2018, 11, 1321. https://doi.org/10.3390/en11051321
Zhu W, Chang X, Wang Y, Zhai H, Yao Z. Reconstruction of Hydraulic Fractures Using Passive Ultrasonic Travel-Time Tomography. Energies. 2018; 11(5):1321. https://doi.org/10.3390/en11051321
Chicago/Turabian StyleZhu, Wei, Xu Chang, Yibo Wang, Hongyu Zhai, and Zhenxing Yao. 2018. "Reconstruction of Hydraulic Fractures Using Passive Ultrasonic Travel-Time Tomography" Energies 11, no. 5: 1321. https://doi.org/10.3390/en11051321
APA StyleZhu, W., Chang, X., Wang, Y., Zhai, H., & Yao, Z. (2018). Reconstruction of Hydraulic Fractures Using Passive Ultrasonic Travel-Time Tomography. Energies, 11(5), 1321. https://doi.org/10.3390/en11051321