Differential Evolution-Based Load Frequency Robust Control for Micro-Grids with Energy Storage Systems

Abstract
:1. Introduction
2. Model Description
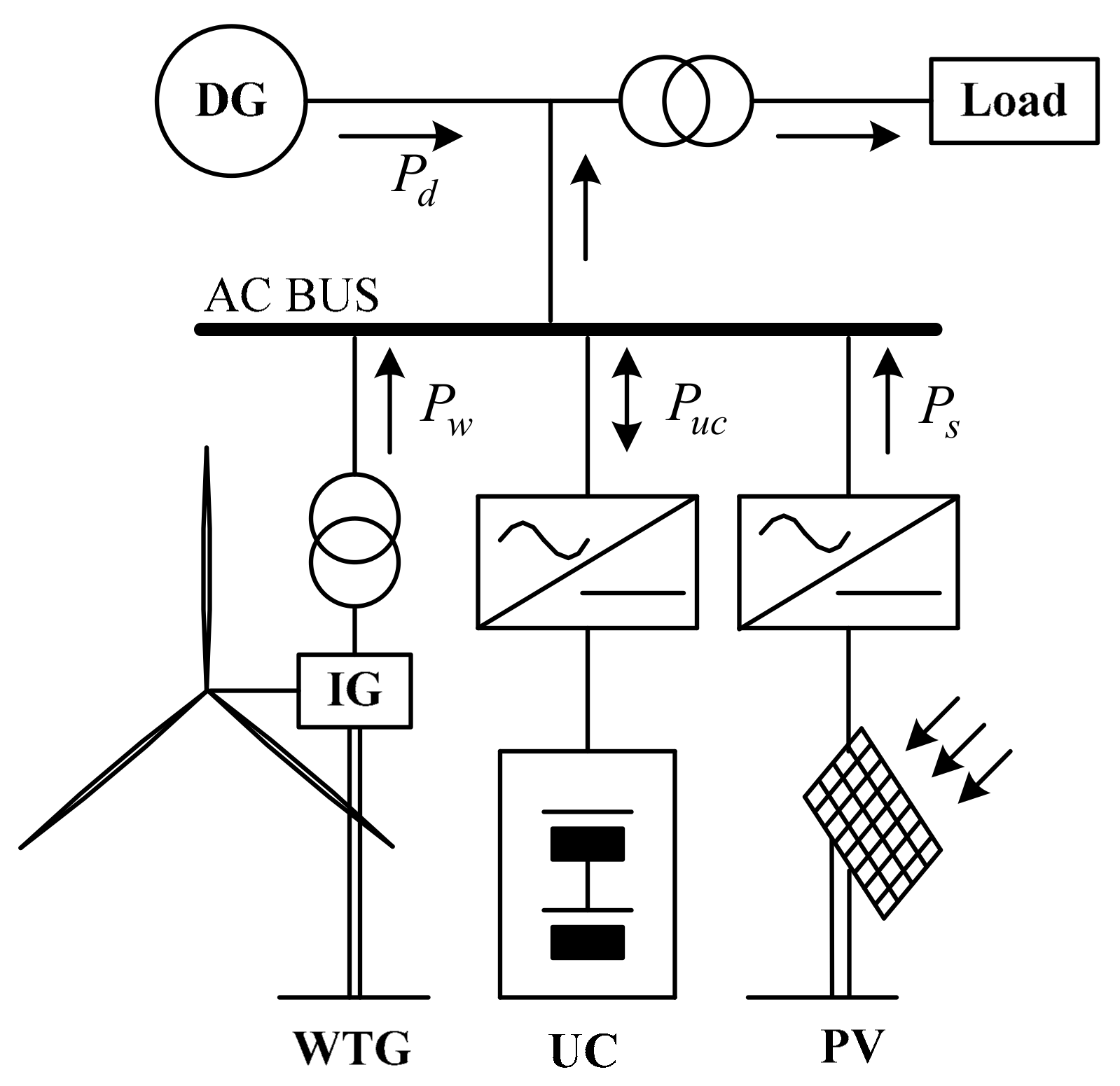
2.1. Description of Micro-Grid Power System
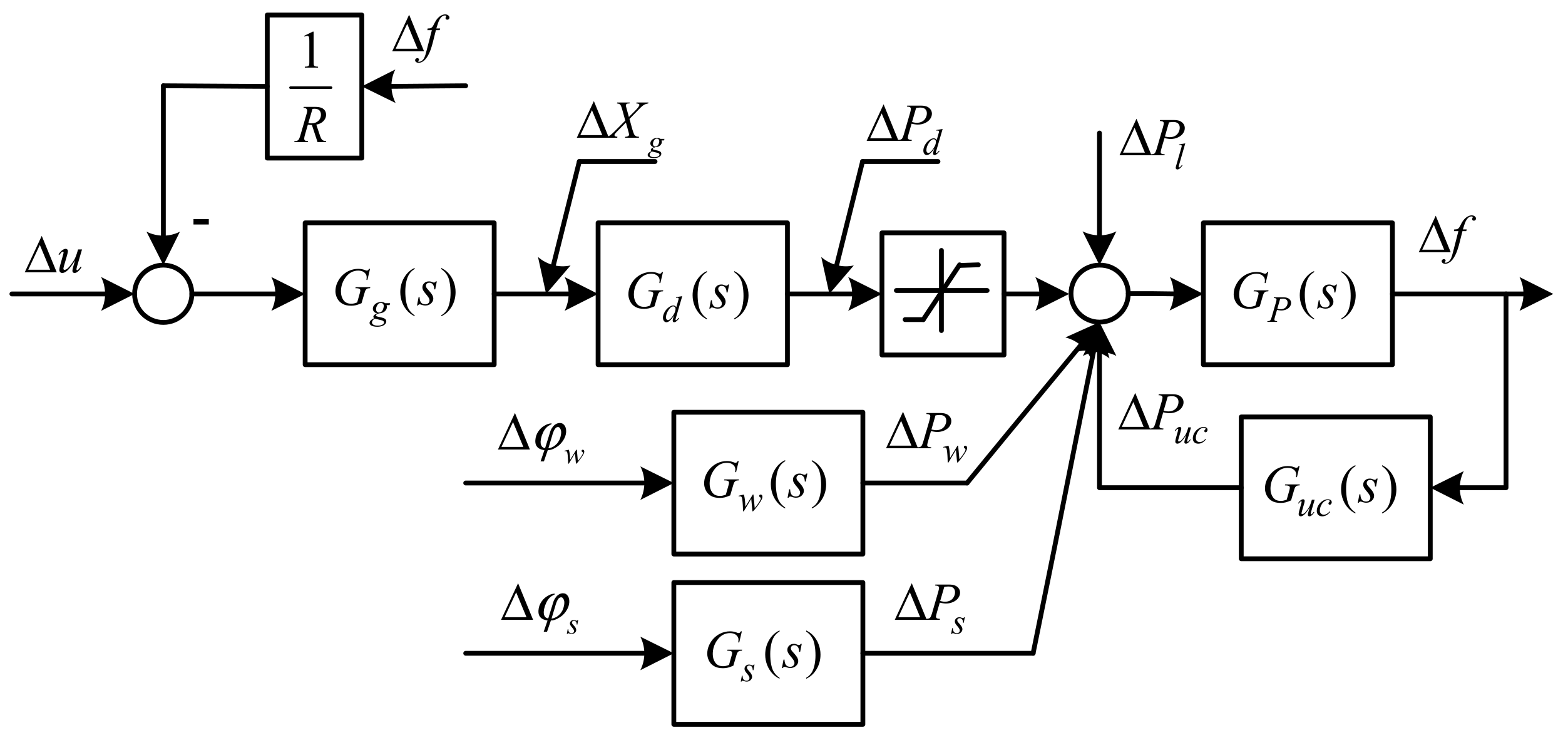
2.2. Load Frequency Control Model
3. Controller Designed Based on μ-Synthesis
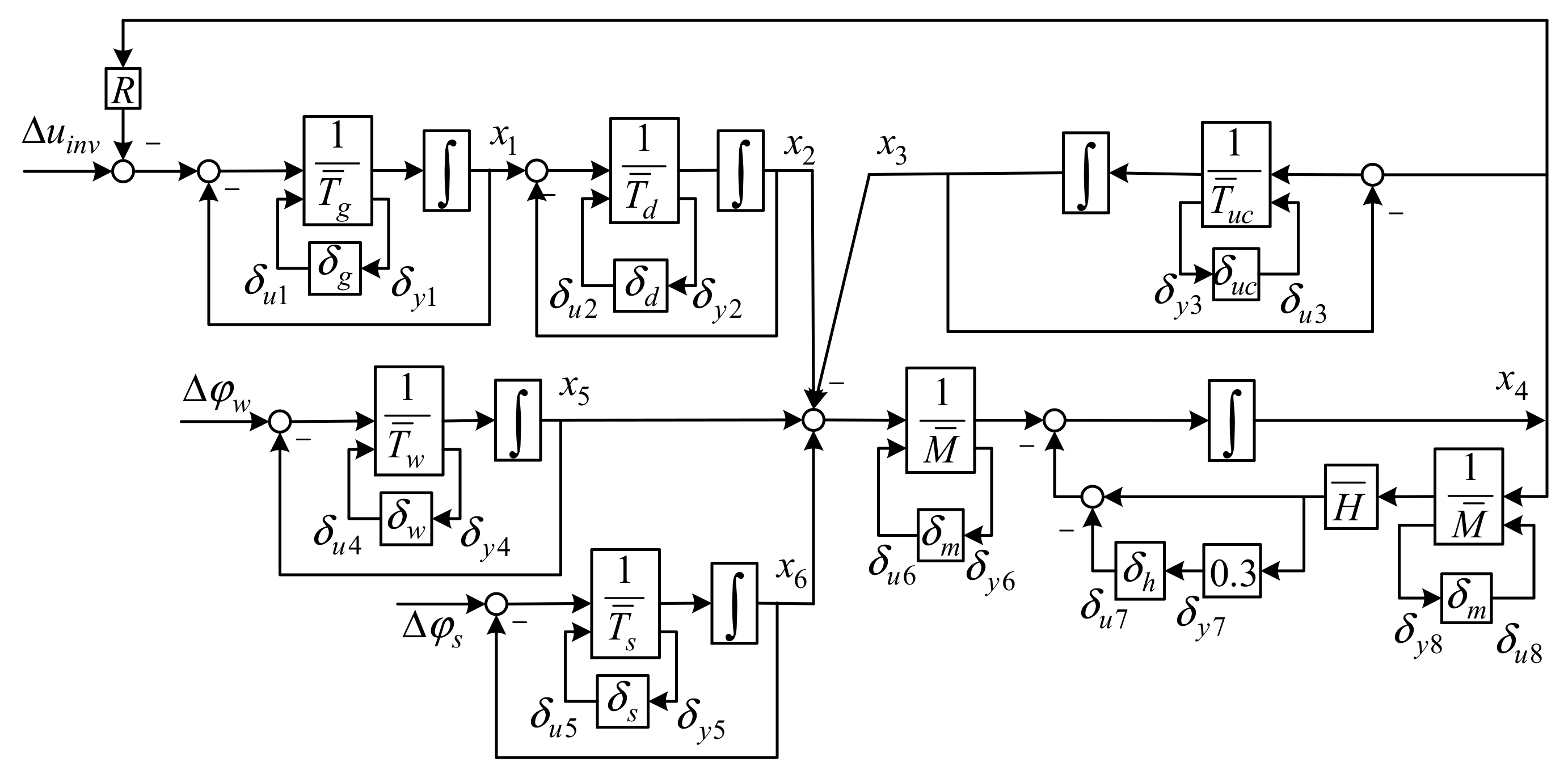
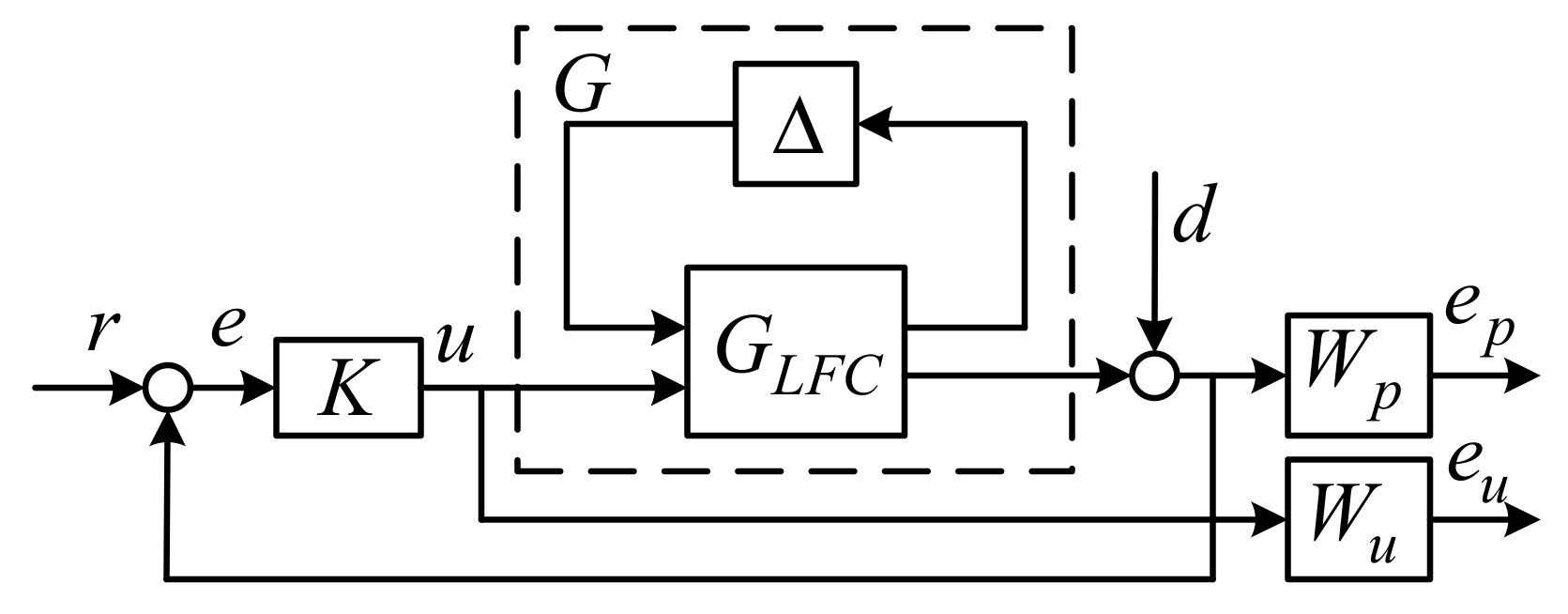
3.1. Uncertainty Model Establish
3.2. Robust Performance Analysis
3.3. DK Iteration
- Step 1:
- Select the initial scale matrix D, generally set D = I;
- Step 2:
- Hold D, and obtain the optimum solution for K via H∞ optimization method. , P is the interconnected augmented matrix include the weighting function and the controlled object.
- Step 3:
- Hold K to solve the convex optimization problem for D at the selected frequency domain and obtain the optimal estimation matrix, mark as . .
- Step 4:
- Let , return to Step 2, repeat steps 2 and 3, until the maximum iteration number is reached, or the constraint is satisfied.
4. Weighting Function Selection Based on Differential Evolution
4.1. Parameters Setting
4.2. Determination of Fitness Function
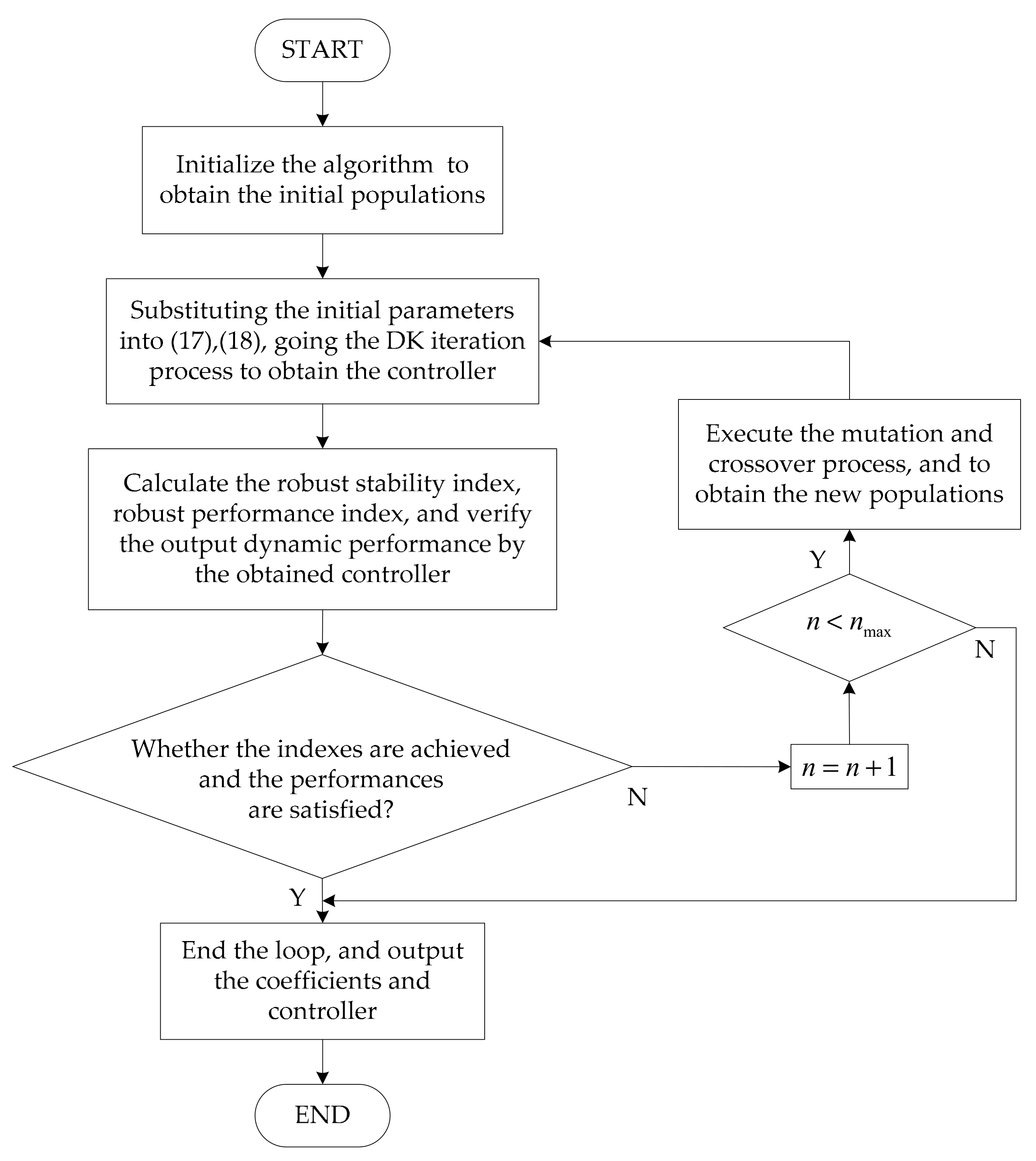
4.3. Algorithm Steps
- (1)
- Establish the load frequency control model which concluding the uncertainties.
- (2)
- Initialize the differential evolution algorithm, and obtain the initial populations.
- (3)
- Take the population parameters into the system and going DK iteration process. After iterations, the controller is obtained.
- (4)
- Computing the system robust stability, robust performance and output dynamic performance, and verifying whether the performances are satisfied.
- (5)
- If the performances are not satisfied, then executing the second differential evolution process, and repeat the step 3 and step 4.
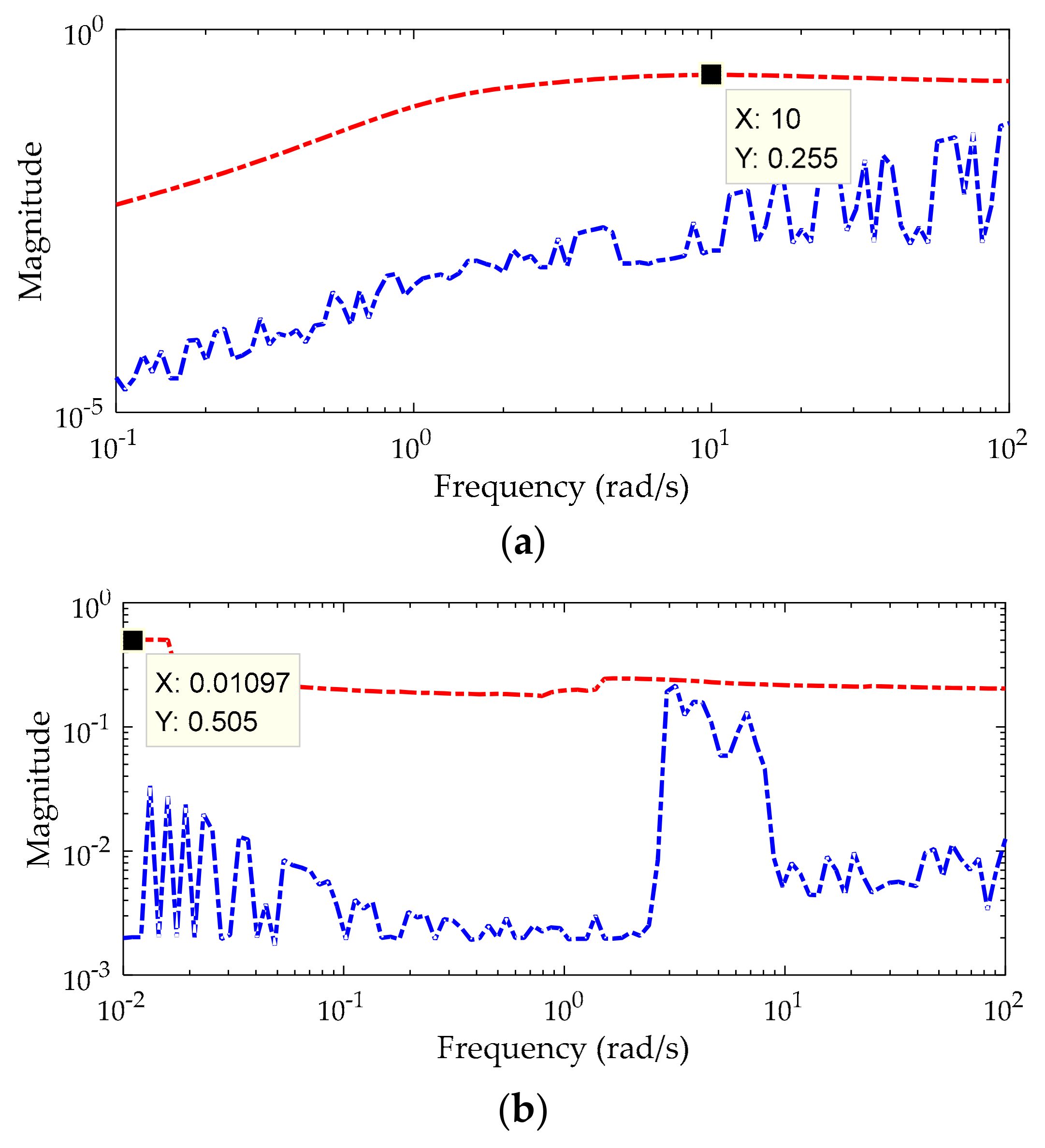
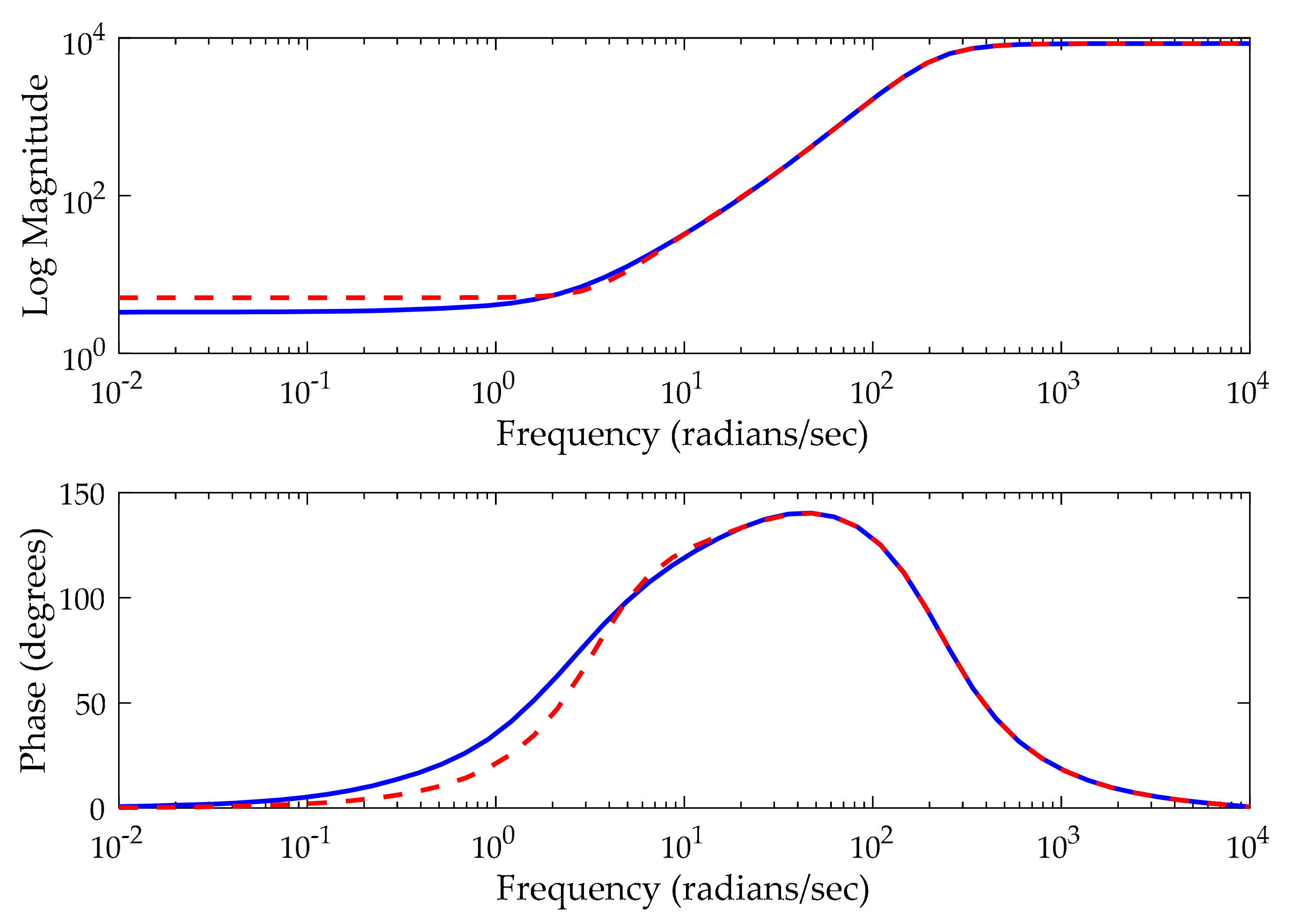
5. Robust Stability and Robust Performance Analysis
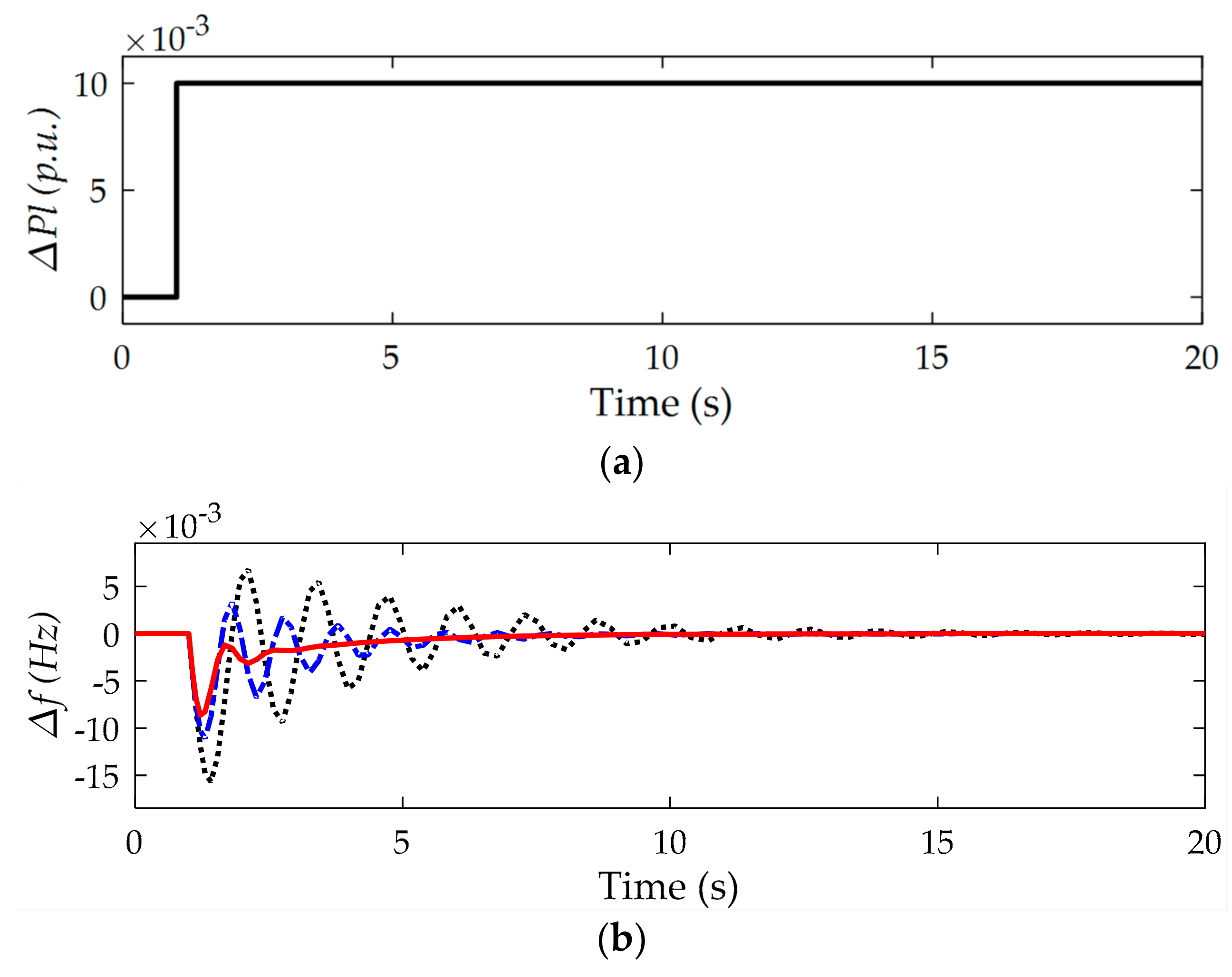
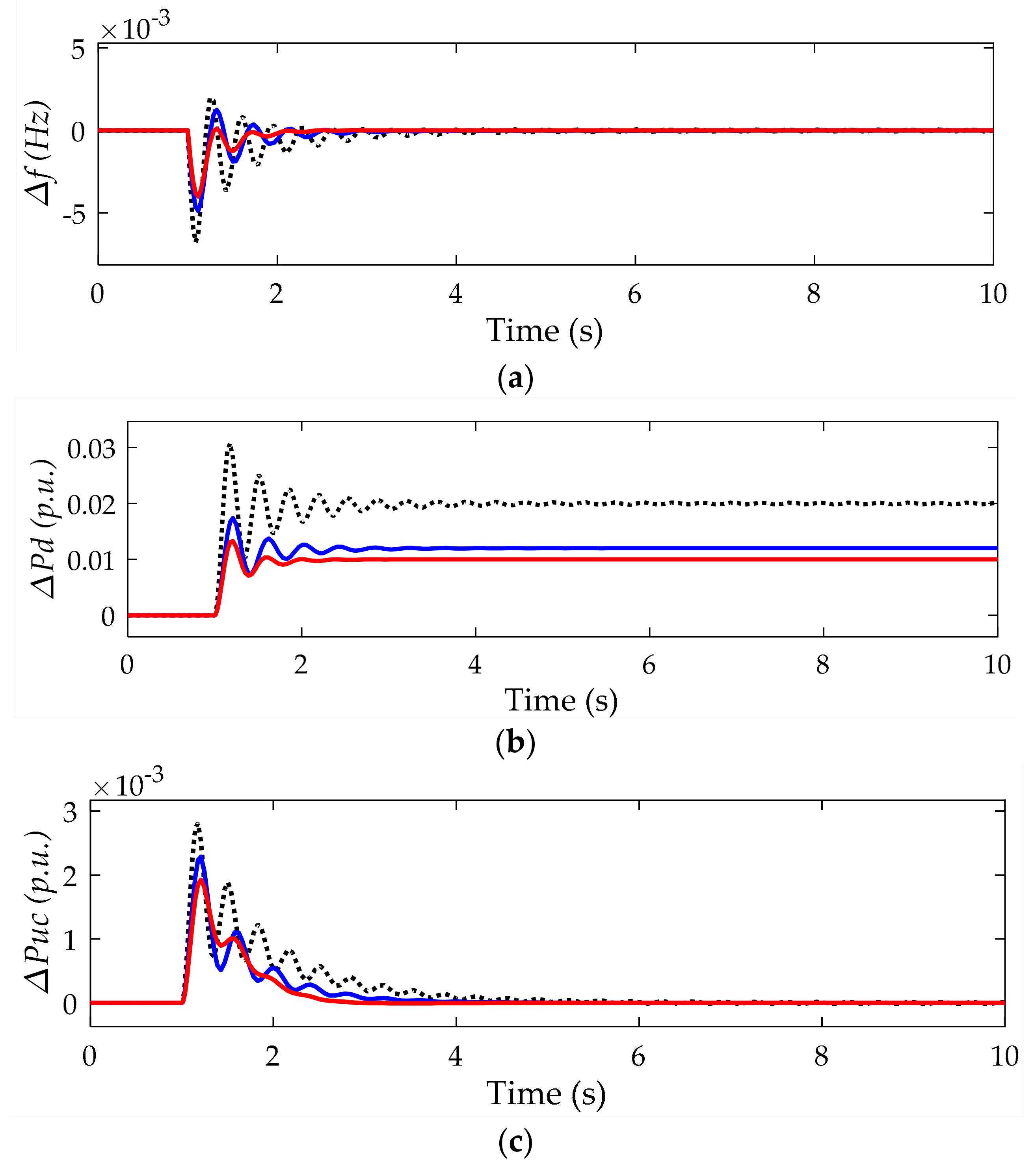
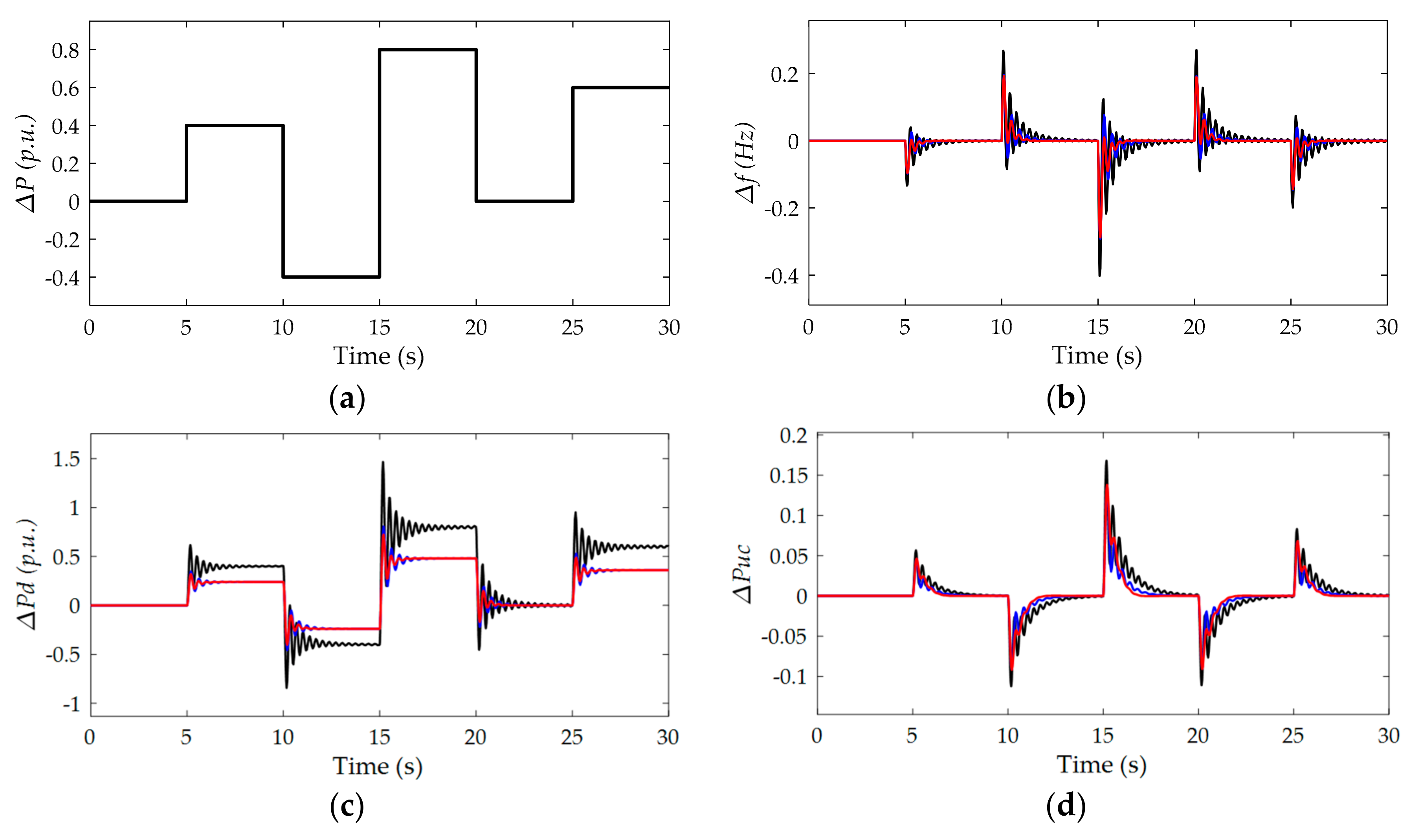
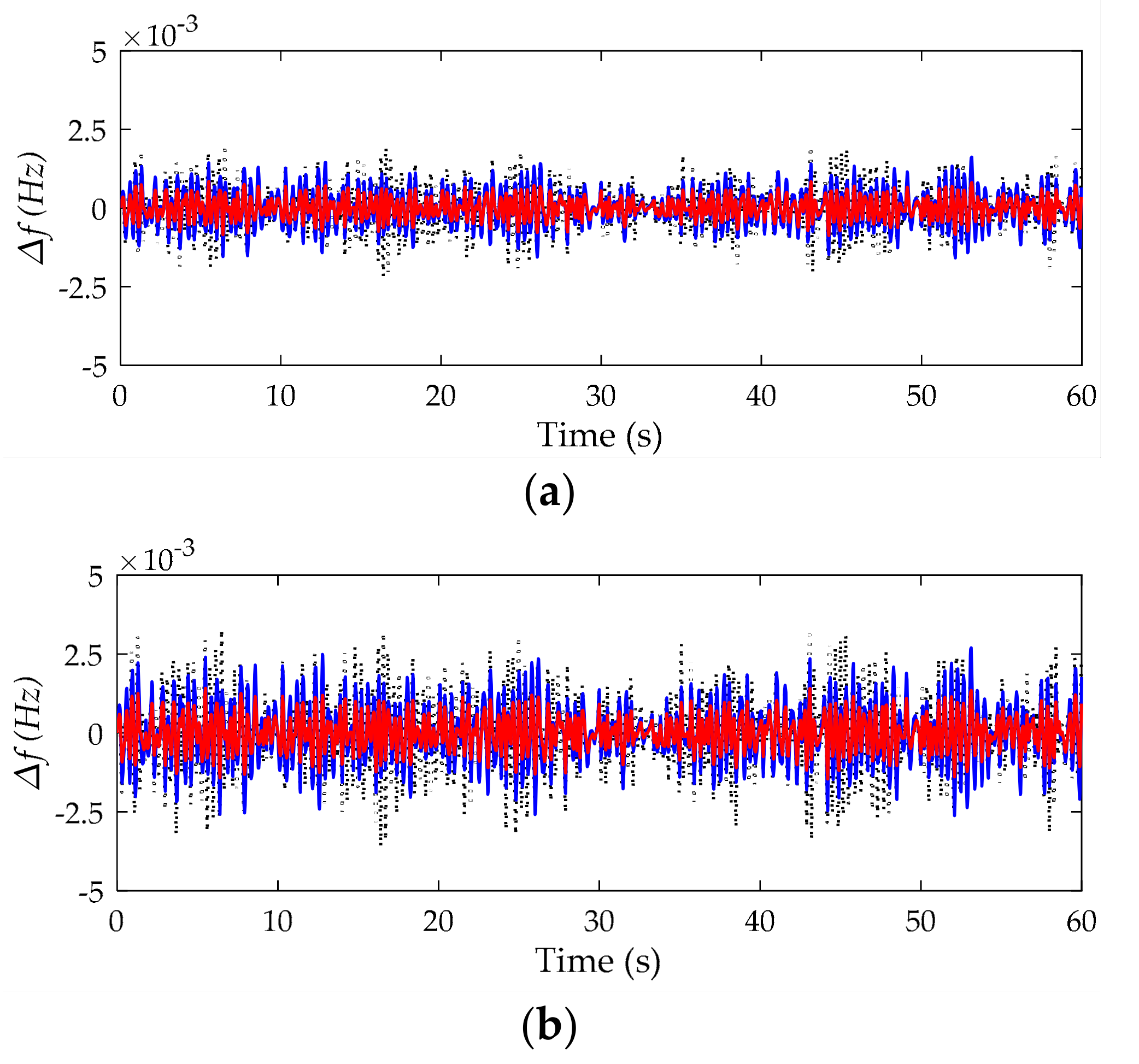
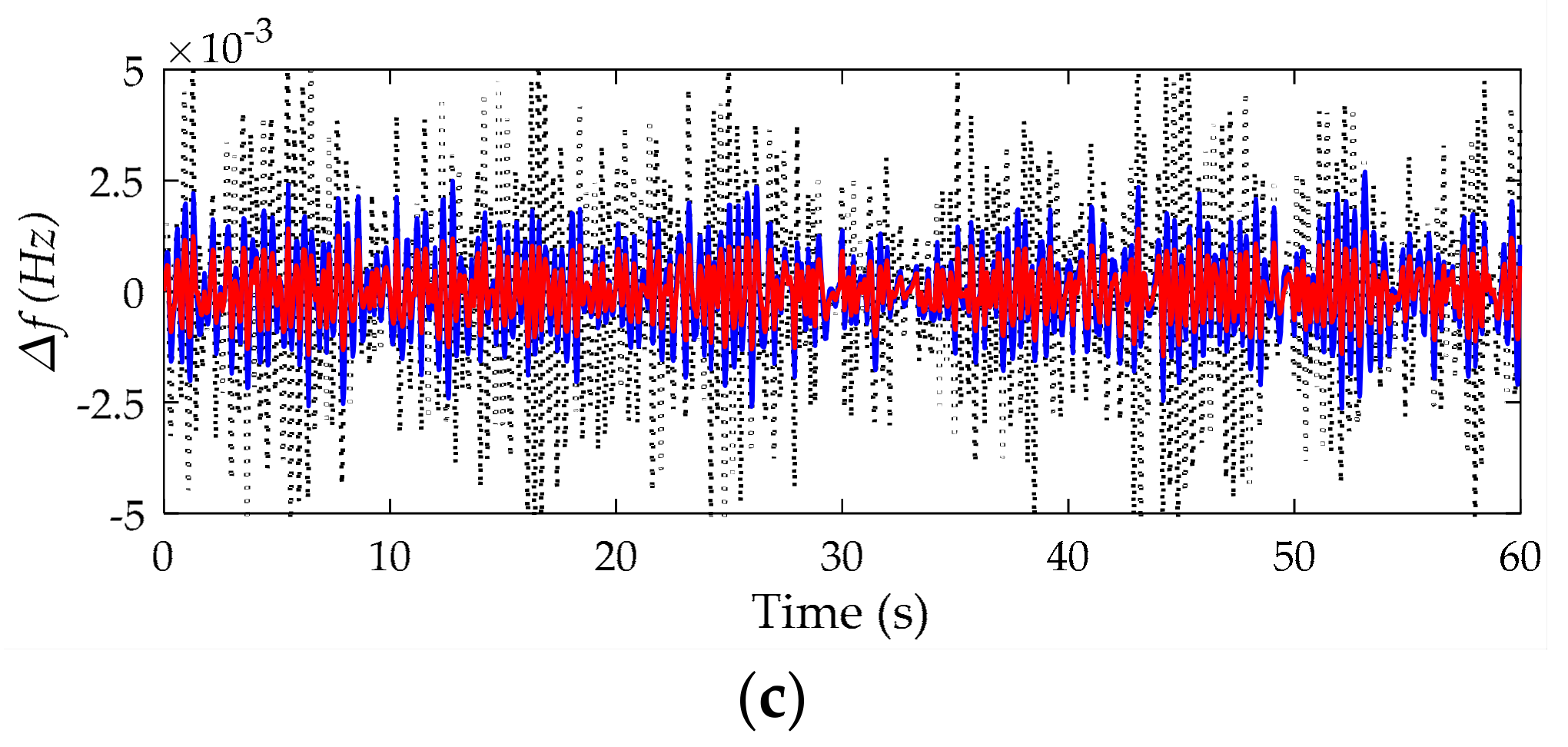
6. Numerical Simulation
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Meng, L.; Sanseverino, E.R.; Luna, A.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Microgrid supervisory controllers and energy management systems: A literature review. Renew. Sustain. Energy Rev. 2016, 60, 1263–1273. [Google Scholar] [CrossRef]
- Wang, C.S.; Liu, Y.X.; Li, X.L.; Guo, L.; Qiao, L.; Lu, H. Energy management system for stand-alone diesel-wind-biomass microgrid with energy storage system. Energy 2016, 97, 90–104. [Google Scholar] [CrossRef]
- Sharma, S.; Bhattacharjee, S.; Bhattacharya, A. Grey wolf optimisation for optimal sizing of battery energy storage device to minimize operation cost of microgrid. IET Gen. Transm. Distrib. 2016, 10, 625–637. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.W. Energy management strategy for supercapacitor in droop-controlled DC microgrid using virtual impedance. IEEE Trans. Power Electron. 2017, 32, 2704–2716. [Google Scholar] [CrossRef]
- Sharma, R.K.; Mishra, S. Dynamic power management and control of PV PEM fuel cell based standalone AC/DC microgrid using hybrid energy storage. IEEE Trans. Ind. Appl. 2017, 54, 526–538. [Google Scholar] [CrossRef]
- Ippolito, M.G.; Telaretti, E.; Zizzo, G.; Graditi, G. A new device for the control and the connection to the grid of combined RES-based generators and electric storage systems. In Proceedings of the International Conference on Clean Electrical Power, Alghero, Italy, 29 August 2013; pp. 262–267. [Google Scholar]
- Pandey, S.K.; Mohanty, S.R.; Kishor, N. A literature survey on load–frequency control for conventional and distribution generation power systems. Renew. Sustain. Energy Rev. 2013, 25, 318–334. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Hussain, S.A.; Abido, M.A. Modeling and control of microgrid: An overview. J. Frankl. Inst. 2014, 351, 2822–2859. [Google Scholar] [CrossRef]
- Graditi, G.; Ciavarella, R.; Valenti, M. An innovative BESS management for dynamic frequency restoration. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe, Milan, Italy, 6–9 June 2017; pp. 1–5. [Google Scholar]
- Graditi, G.; Ciavarella, R.; Valenti, M.; Ferruzzi, G.; Zizzo, G. Frequency stability in microgrid: Control strategies and analysis of BESS aging effects. In Proceedings of the IEEE International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Anacapri, Italy, 22–24 June 2016; pp. 295–299. [Google Scholar]
- Ou, T.C.; Hong, C.M. Dynamic operation and control of microgrid hybrid power systems. Energy 2014, 66, 314–323. [Google Scholar] [CrossRef]
- Hong, C.M.; Ou, T.C.; Lu, K.H. Development of intelligent MPPT (maximum power point tracking) control for a grid-connected hybrid power generation system. Energy 2013, 50, 270–279. [Google Scholar] [CrossRef]
- Adhikari, S.; Li, F. Coordinated V-F and P-Q control of solar photovoltaic generators with MPPT and battery storage in microgrids. IEEE Trans. Smart Grid 2014, 5, 1270–1281. [Google Scholar] [CrossRef]
- Ou, T.C.; Su, W.F.; Liu, X.Z. A modified bird-mating optimization with hill-climbing for connection decisions of transformers. Energies 2016, 9, 671. [Google Scholar] [CrossRef]
- Ou, T.C. A novel unsymmetrical faults analysis for microgrid distribution systems. Int. J. Electr. Power Energy Syst. 2012, 43, 1017–1024. [Google Scholar] [CrossRef]
- Ou, T.C. Ground fault current analysis with a direct building algorithm for microgrid distribution. Int. J. Electr. Power Energy Syst. 2013, 53, 867–875. [Google Scholar] [CrossRef]
- Ou, T.C.; Lu, K.H.; Huang, C.J. Improvement of Transient Stability in a Hybrid Power Multi-System Using a Designed NIDC (Novel Intelligent Damping Controller). Energies 2017, 10, 488. [Google Scholar] [CrossRef]
- Sathya, M.R.; Ansari, M.T. Load frequency control using Bat inspired algorithm based dual mode gain scheduling of PI controllers for interconnected power system. Int. J. Electr. Power Energy Syst. 2015, 64, 365–374. [Google Scholar] [CrossRef]
- Sönmez, S.; Ayasun, S. Stability region in the parameter space of PI controller for a single-area load frequency control system with time delay. IEEE Trans. Power Syst. 2015, 31, 829–830. [Google Scholar] [CrossRef]
- Zamani, A.; Barakati, S.M.; Yousofidarmian, S. Design of a fractional order PID controller using GBMO algorithm for load-frequency control with governor saturation consideration. ISA Trans. 2016, 64, 56–66. [Google Scholar] [CrossRef] [PubMed]
- Pradhan, P.C.; Sahu, R.K.; Panda, S. Firefly algorithm optimized fuzzy PID controller for AGC of multi-area multi-source power systems with UPFC and SMES. Eng. Sci. Technol. 2016, 19, 338–354. [Google Scholar] [CrossRef]
- Zhang, S.; Mishra, Y.; Shahidehpour, M. Fuzzy-logic based frequency controller for wind farms augmented with energy storage systems. IEEE Trans. Power Syst. 2016, 31, 1595–1603. [Google Scholar] [CrossRef]
- Mahto, T.; Mukherjee, V. A novel scaling factor based fuzzy logic controller for frequency control of an isolated hybrid power system. Energy 2017, 130, 339–350. [Google Scholar] [CrossRef]
- Vachirasricirikul, S.; Ngamroo, I. Robust LFC in a smart grid with wind power penetration by coordinated V2G control and frequency controller. IEEE Trans. Smart Grid 2017, 5, 371–380. [Google Scholar] [CrossRef]
- Yang, J.; Zeng, Z.; Tang, Y.; Yan, J.; He, H.; Wu, Y. Load frequency control in isolated micro-grid with electrical vehicle based on multivariable generalized predictive theory. Energies 2015, 8, 2145–2164. [Google Scholar] [CrossRef]
- Shankar, R.; Chatterjee, K.; Bhushan, R. Impact of energy storage system on load frequency control for diverse sources of interconnected power system in deregulated power environment. Int. J. Electr. Power Energy Syst. 2016, 79, 11–26. [Google Scholar] [CrossRef]
- Ma, M.; Zhang, C.; Liu, X.; Chen, H. Distributed model predictive load frequency control of the multi-area power system after deregulation. IEEE Trans. Ind. Electron. 2017, 64, 5129–5139. [Google Scholar] [CrossRef]
- Rinaldi, G.; Cucuzzella, M.; Ferrara, A. Third order sliding mode observer-based approach for distributed optimal load frequency control. IEEE Control Syst. Lett. 2017, 1, 215–220. [Google Scholar] [CrossRef]
- Mu, C.; Tang, Y.; He, H. Improved sliding mode design for load frequency control of power system integrated an adaptive learning strategy. IEEE Trans. Ind. Electron. 2017, 64, 6742–6751. [Google Scholar] [CrossRef]
- Fu, C.; Tan, W. Decentralized load frequency control for power systems with communication delays via active disturbance rejection. IET Gen. Transm. Distrib. 2017, 12, 1397–1403. [Google Scholar]
- Zhang, C.K.; Jiang, L.; Wu, Q.H.; He, Y.; Wu, M. Delay-dependent robust load frequency control for time delay power systems. IEEE Trans. Power Syst. 2013, 28, 2192–2201. [Google Scholar] [CrossRef]
- Ning, C. Robust H∞ load-frequency control in interconnected power systems. IET Control Theory Appl. 2016, 10, 67–75. [Google Scholar]
- Han, Y.; Young, P.M.; Jain, A.; Daniel, Z. Robust control for microgrid frequency deviation reduction with attached storage system. IEEE Trans. Smart Grid 2015, 6, 557–565. [Google Scholar] [CrossRef]
- Zhao, J.; Xue, L.; Fu, Y.; Hu, X.G.; Li, F.X. Coordinated microgrid frequency regulation based on DFIG variable coefficient using virtual inertia and primary frequency control. IEEE Trans. Energy Convers. 2016, 31, 833–845. [Google Scholar] [CrossRef]
- Bevrani, H.; Feizi, M.R.; Ataee, S. Robust Frequency Control in an Islanded Microgrid: H∞ and μ-Synthesis Approaches. IEEE Trans. Smart Grid 2016, 7, 706–717. [Google Scholar] [CrossRef]
- Zhu, D.; Hug-Glanzmann, G. Coordination of storage and generation in power system frequency control using an H∞ approach. IET Gen. Transm. Distrib. 2013, 7, 1263–1271. [Google Scholar] [CrossRef]
- Pandey, S.K.; Mohanty, S.R.; Kishor, N.; Catalão, J.P.S. Frequency regulation in hybrid power systems using particle swarm optimization and linear matrix inequalities based robust controller design. Int. J. Electr. Power Energy Syst. 2014, 63, 887–900. [Google Scholar] [CrossRef]
- Sasaki, T.; Kadoya, T.; Enomoto, K. Study on load frequency control using redox flow batteries. IEEE Trans. Power Syst. 2004, 19, 660–667. [Google Scholar] [CrossRef]
- Jayalakshmi, N.S.; Gaonkar, D.N. Performance study of isolated hybrid power system with multiple generation and energy storage units. In Proceedings of the 2011 International Conference on Power and Energy Systems, Chennai, India, 22–24 December 2011; pp. 1–5. [Google Scholar]
- Mohanty, S.R.; Kishor, N.; Ray, P.K. Robust H-infinite loop shaping controller based on hybrid PSO and harmonic search for frequency regulation in hybrid distributed generation system. Int. J. Electr. Power Energy Syst. 2014, 60, 302–316. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Differential Evolution: A Survey of the State-of-the-Art. IEEE Trans. Evolut. Comput. 2011, 15, 4–31. [Google Scholar] [CrossRef]
- Shousong, H. Automatic Control Theory, 4th ed.; Science: Beijing, China, 2001; pp. 201–213. [Google Scholar]
- Dawei, G.; Petkov, P.H.; Konstantinov, M.M. Robust Control Design with MATLAB; Springer: New York, NY, USA, 2005; pp. 158–161. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value |
|---|---|
| Rated Frequency (Hz) | 50 |
| Rated power (MW) | 2 |
| Governor Time Constant Tg (s) | 0.008 |
| Diesel Time Constant Td (s) | 0.3 |
| Ultracapacitor Time Constant Tuc (s) | 0.1 |
| wind turbine generator time constant Tw (s) | 1.5 |
| photovoltaic panel time constant Ts (s) | 1.8 |
| Inertia coefficient M (p.u./s) | 0.15 |
| Damping coefficient H (p.u./Hz) | 0.008 |
| Droop coefficient R (p.u./Hz) | 2.4 |
| Iterations | K Order | D Order | γ Value | μ Value | μ-RS | μ-RP |
|---|---|---|---|---|---|---|
| 1 | 6 | 0 | 8.777 | 1.498 | 1.172 | 1.3516 |
| 2 | 8 | 2 | 0.744 | 0.520 | 0.549 | 0.817 |
| 3 | 12 | 6 | 0.439 | 0.436 | 0.255 | 0.505 |
| 4 | 20 | 14 | 0.390 | 0.389 | 0.255 | 0.505 |
| 5 | 20 | 14 | 0.369 | 0.369 | 0.255 | 0.505 |
| 6 | 30 | 24 | 0.360 | 0.359 | 0.255 | 0.505 |
| 7 | 30 | 24 | 0.353 | 0.352 | 0.255 | 0.505 |
| 8 | 32 | 26 | 0.349 | 0.349 | 0.255 | 0.505 |
| 9 | 32 | 26 | 0.348 | 0.348 | 0.255 | 0.505 |
| 10 | 34 | 28 | 0.347 | 0.347 | 0.255 | 0.505 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Wang, X.; Xiao, J. Differential Evolution-Based Load Frequency Robust Control for Micro-Grids with Energy Storage Systems. Energies 2018, 11, 1686. https://doi.org/10.3390/en11071686
Li H, Wang X, Xiao J. Differential Evolution-Based Load Frequency Robust Control for Micro-Grids with Energy Storage Systems. Energies. 2018; 11(7):1686. https://doi.org/10.3390/en11071686
Chicago/Turabian StyleLi, Hongyue, Xihuai Wang, and Jianmei Xiao. 2018. "Differential Evolution-Based Load Frequency Robust Control for Micro-Grids with Energy Storage Systems" Energies 11, no. 7: 1686. https://doi.org/10.3390/en11071686
APA StyleLi, H., Wang, X., & Xiao, J. (2018). Differential Evolution-Based Load Frequency Robust Control for Micro-Grids with Energy Storage Systems. Energies, 11(7), 1686. https://doi.org/10.3390/en11071686