Control Scheme and Power Electronics Architecture for a Wirelessly Distributed and Enabled Battery Energy Storage System



Abstract
:1. Introduction
- (1)
- Increasing the capacity of the Li-Ion battery pack. This has the following drawbacks: (a) increase in the weight of the battery and decrease in available space in the EV which impacts the efficiency of the EV (unless newer high density batteries are developed); (b) increase in the needed recharging time; (c) there is still a need to wait for the EV to charge which requires longer time than refueling a gasoline or fossil fuel based vehicle within a few minutes (unless very fast chargers are continued to be developed and used as discussed below); (d) conventional battery packs integrated with EVs cannot be swapped and shared with other EVs when needed; and (e) larger battery means higher amount of energy which means higher risk of injury when there is catastrophic battery failure and fire.
- (2)
- Develop faster high-power chargers [1,2,3,9,10]. Faster chargers reduce the time needed to recharge the battery of an EV. However, there are several drawbacks and challenges associated with this option such as: (a) it is well known and documented that the faster a Li-Ion battery is charged, the smaller the number of available stored charges is and the faster capacity fading will occur (the faster the battery is charged, the faster its state-of-health will degrade and the shorter its lifetime is expected to be) [11,12,13,14]; (b) developing faster chargers requires higher power capability which requires larger investments in infrastructure that result in increased initial and lifetime costs; and (c) it is not practical to assume that high-power faster chargers can be available in every location the EV will travel to. It does not seem, as of the date of this paper, that it is practical to assume that an emergency fast charger can be brought to an EV with depleted battery while in the case of a gasoline or fossil fuel based vehicle it can quickly be refueled from another vehicle or a container that includes fossil fuel (gasoline). Note that fast charging is realizable for up to about ≈70% SOC (with Constant Current Charging Mode, CCCM) and therefore about third or more of the battery usable capacity would need to be charged at slow rate (with Constant Voltage Charging Mode, CVCM). With extreme charging, the number is lower than 70% SOC, depending on the charging rate.
- (3)
- Adopt battery swapping concept. While battery swapping concept is about a century old, there have been increased consideration of the concept and related developments [4,5,15,16]. The drawback of existing battery swapping concepts are such as: (a) the weight of the battery necessitate specialized equipment and installation methods to realize swapping which needs to be available/accessible in many locations; (b) the involved electrical and mechanical connections require trained personnel in addition to specialized equipment to perform the swapping; (c) there might be safety and reliability risks each time the battery is swapped if not done appropriately/correctly; and (d) swapping a battery with large size and heavy weight might require longer time than refueling a vehicle with gasoline. The requirements to deploy swapping locations’ infrastructure and trained personnel (especially when this needs to happen in high number of locations like gas stations) yields significant cost increase, which makes it difficult to sustain a related business. If these drawbacks can be eliminated, battery swapping could be one of the best solutions for range anxiety problem and limited driving range.
- (4)
- Dynamic Wireless Power Charging (DWPC) [7,8,17] is another potential concept that has been reconsidered especially in the recent decade. Using DWPC, the vehicle is wirelessly charged while moving from Wireless Power Transfer (WPT) system’s coils that are embedded in the street/ground. While this concept can potentially be part of the solution to range anxiety in the future, it faces two challenges: (a) Required high infrastructure cost and (b) DWPC cannot be practically expected to be available in all streets/locations.
2. Principle of the WEDES System Architecture and Related Implementation Requirements
- (1)
- The WEDES system and controller should be able to control the SOC of each WEDES-MX module such that the energy drawn from each module is based on its SOC value and such that SOC balancing is achieved even when asymmetrically charged modules are used/inserted.
- (2)
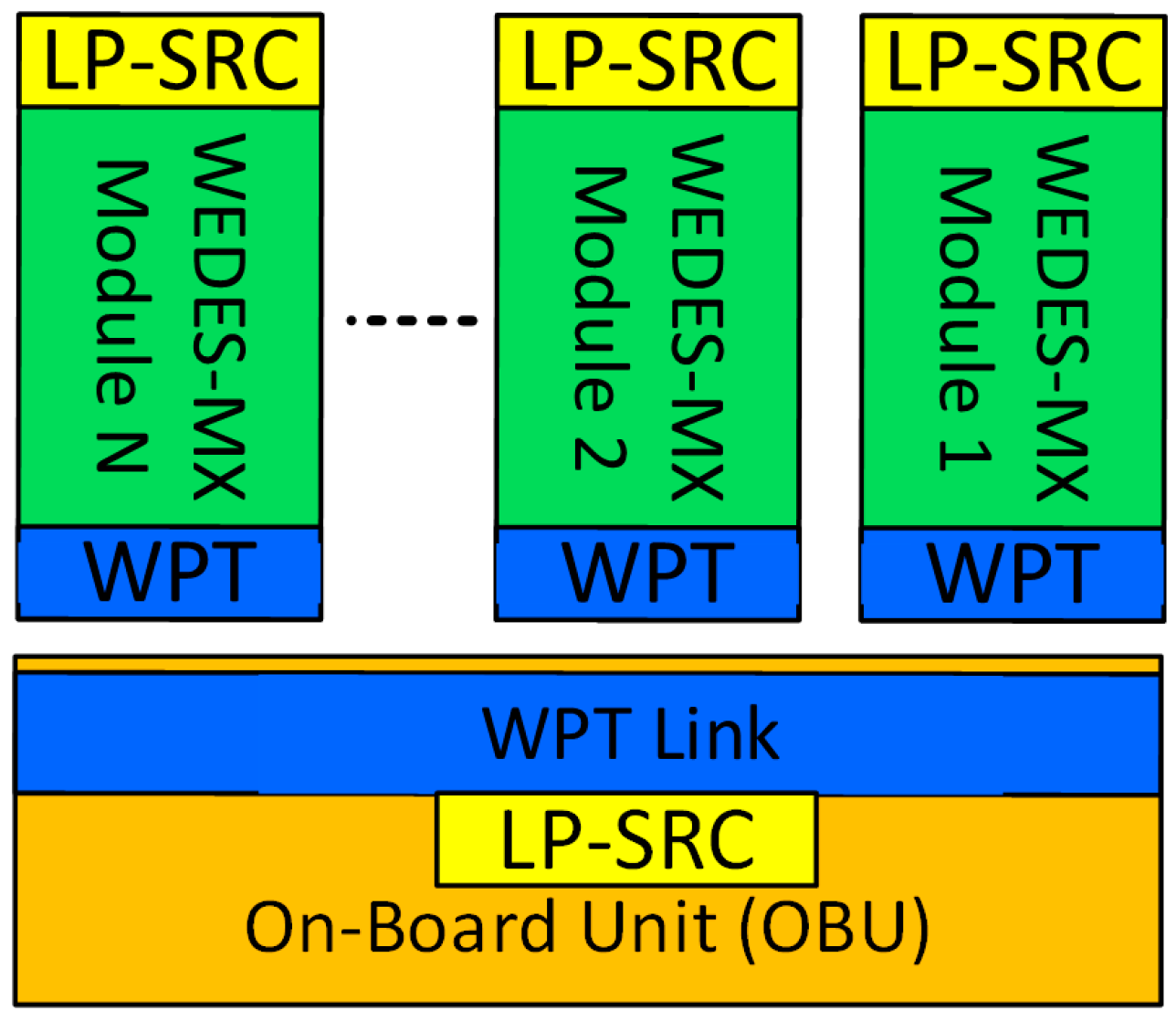
- The WEDES-MX modules should not need to communicate with each other and only need to communicate with the OBU, which is the assumption in this paper. Otherwise the WEDES system becomes impractical and WEDES-MX modules cannot be easily exchanged and swapped between multiple EVs.
- (3)
- It is desired that the OBU is able to have a controller that allows it to operate with multiple WEDES-MX modules (N modules) when they are all inserted in the receiving host and when one or some of the WEDES-MX modules are missing from the host (up to a limited M number of missing modules based on a given design). For example, for an OBU that can accept N = 9 WEDES-MX modules, the system might be designed to be able to still operate with N − M = 9 − 3 = 6 WEDES-MX modules. This is desired in order for the system to operate either when one or more WEDES-MX modules become fully discharged or faulty (turned-off because a fault is detected or for other safety/protection reason) or when one or more WEDES-MX modules are being swapped or exchanged.
- (4)
- The weight of each WEDES-MX module can be no higher than what a healthy person (adult) with average strength can lift off ground for a short time during exchange/swapping.
3. The WEDES Controller and Its Operation Principle
- (1)
- Battery cells that are connected in series and/or in parallel combination. This forms a battery bank which determines the voltage, current, power, and energy capabilities of each WEDEX-MX module.
- (2)
- A DC-DC power converter (e.g., boost converter in the design example of this paper and its experiment) with closed-loop control. The input to this converter is the battery bank in (1) and the output is a regulated DC voltage (VMX1 through VMXN) that is adjusted to realize SOC balancing control and bus voltage regulation as described later in this section. This output is connected to an inverter power stage.
- (3)
- An open-loop DC-AC inverter stage with fixed duty cycle such as a half-bridge (or full-bridge) with 50% duty-cycle. The input to this inverter is the DC voltage from the DC-DC power converter in (2) and the output is an AC voltage/current that is applied to the Inductive Wireless Power (I-WPT) transmitter (Tx) for inductively transmitting wireless power to the OBU.
4. Experimental Prototype Results
5. Additional Comments
5.1. Number of Missing Modules in a WEDES System
5.2. Example WEDES System Design Based on a Commercially Available EV
5.3. WPT Coils
5.4. Wireless Communications for the WEDES System
5.5. Selection of Circuit Topology for the WPT Transmitter
6. Conclusions
- (1)
- The presentation of a power electronics realization (Figure 5) of a battery energy storage system that uses/employs wireless power transfer as an embedded part (and not only for conventional wireless charging of the battery) in order to open the possibility for making battery swapping more practical, safer, and faster.
- (2)
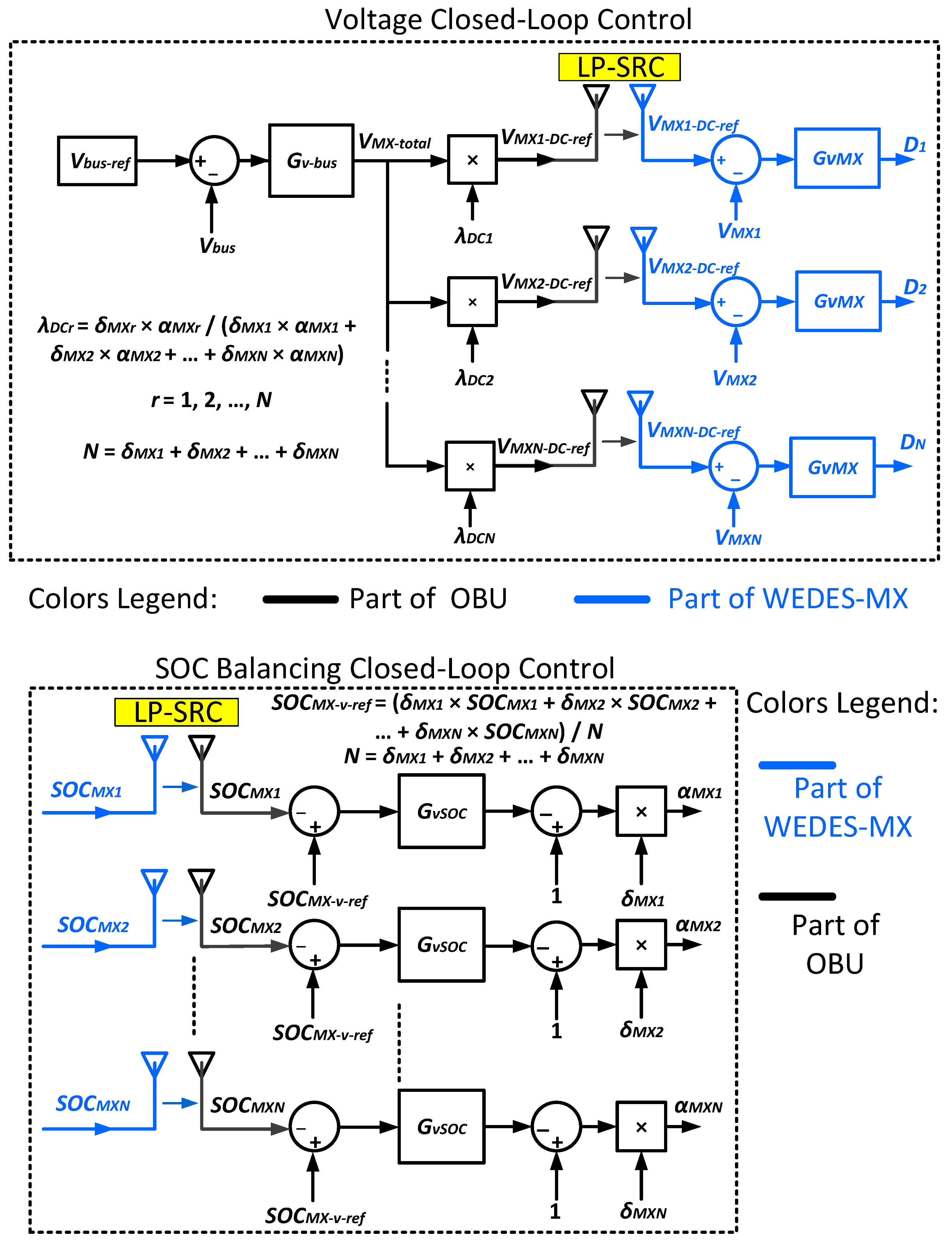
- The presentation and development of the novel WEDES controller (Figure 6) which consists of several control loops with wireless communications that allow for maintaining SOC balancing and voltage regulation even under removal and insertion of a module and with the existence of several WPT links which might not be fully symmetric under practical conditions. Equation (1) through Equation (4) explains part of the operation principle of the WEDES controller.
- (3)
- The WEDES controller consists of an SOC control loop and two voltage control loops. The two voltage control loops are interconnected with each other and with the SOC control loop such that SOC balancing can be realized while at the same time maintaining bus voltage regulation without the need for an additional power stage. In other words, same power electronics is utilized for SOC balancing of modules and for output bus voltage regulation.
- (4)
- The wireless communication is utilized such that the removal and insertion (swapping) of WEDES-MX modules and/or a missing WEDES-MX module do not interrupt the operation of the WEDES system.
- (5)
- The paper as a whole presents and validates a concept with high potential for reducing range anxiety associated with electric vehicles after presenting a literature review in Section 1 for state-of-the-art methods and comparing their advantages and drawbacks.
- (1)
- Swapping/exchanging WEDES-MX modules does not require trained personnel and can potentially be done by a healthy person (adult) with average strength that can handle and carry a WEDES-MX module (like handling and carrying a gasoline container).
- (2)
- Each WEDES-MX module is sealed in a completely closed container with power and information being transferred wirelessly. No electrical or mechanical connections needs to be handled. Therefore, the swapping/exchange is made fast, safe and relatively easy.
- (3)
- The required infrastructure for the exchange locations is minimal. Each WEDES-MX module can be recharged wirelessly using charging host slots as shown in Figure 2c for example which can exist as a part of vending machine like unit. The recharging does not need to happen at fast rates and can be scheduled to occur during low energy demand from the grid and/or when renewable energy is available. The modules can also potentially be charged while inserted in the vehicle through the OBU of the vehicle (in this case, the diode-based bridge rectifiers of the OBU would have to be replaced with active/transistor switch-based rectifiers to allow for bi-directional power flow).
- (4)
- The WEDES controller is able to rebalance the SOC of several WEDES-MX in the EV when inserted even if they have SOC mismatch (asymmetrically charged) and even if they have different capacities. The WEDES controller automatically adjusts the rate of discharge from each module regardless of its capacity such that SOC balancing is achieved and maintained.
- (5)
- The WEDES controller does not require the WEDES-MX modules to communicate with each other and only need to communicate with the OBU. Therefore, the failure of a module or a shutdown of a module (e.g., for safety before it fails) will not interrupt the operation of the system. Therefore, the EV can continue to operate until the failed module is replaced.
- (6)
- The WEDES system with the WEDES controller allows for sharing and swapping the WEDES-MX modules between EVs when needed. This potentially can be even easier than pumping gas from a vehicle to another.
- (7)
- As battery technology advances, for example to achieve higher energy densities, newer WEDES-MX modules with the same size can have higher capacities and can be used in the same EVs with other new modules or old modules without the need to replace all the battery system or all the WEDES-MX modules.
Author Contributions
Funding
Conflicts of Interest
References
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.B.; Hossain, E. A Comprehensive Study of Key Electric Vehicle (EV) Components, Technologies, Challenges, Impacts, and Future Direction of Development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of Battery Charger Topologies, Charging Power Levels, and Infrastructure for Plug-In Electric and Hybrid Vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Abu Qahouq, J.A.; Cao, Y. Distributed battery system with wireless control and power transfer—A concept introduction. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, San Antonio, CA, USA, 4–8 March 2018; pp. 344–347. [Google Scholar]
- Charging Station (Battery Swapping Section). Wikipedia, the Free Encyclopedia. Available online: https://en.wikipedia.org/wiki/Charging_station#Battery_swapping (accessed on 24 May 2018).
- Shao, S.; Guo, S.; Qiu, X. A Mobile Battery Swapping Service for Electric Vehicles Based on a Battery Swapping Van. Energies 2017, 10, 1667. [Google Scholar] [CrossRef]
- Huang, W.; Abu Qahouq, J.A. Energy sharing control scheme for State-of-Charge balancing of distributed battery energy storage system. IEEE Trans. Ind. Electron. 2015, 62, 2764–2776. [Google Scholar] [CrossRef]
- Mai, R.; Li, H.; Liu, Y.; Zhou, K.; Fu, L.; He, Z. A Three-Phase Dynamic Wireless Charging System with Constant Output Voltage. Energies 2018, 11, 45. [Google Scholar] [Green Version]
- Rakhymbay, A.; Khamitov, A.; Bagheri, M.; Alimkhanuly, B.; Lu, M.; Phung, T. Precise Analysis on Mutual Inductance Variation in Dynamic Wireless Charging of Electric Vehicle. Energies 2018, 11, 624. [Google Scholar] [CrossRef]
- Schroeder, A.; Traber, T. The economics of fast charging infrastructure for electric vehicles. Energy Policy 2012, 43, 136–144. [Google Scholar] [CrossRef]
- Chehab, N. Pump up the Charge with Extreme Fast Charging. US Department of Energy. Available online: https://energy.gov/eere/articles/pump-charge-extreme-fast-charging (accessed on 24 May 2018).
- Lacey, G.; Lacey, T.; Putrus, G.; Kotter, R. The effect of cycling on the state of health of the electric vehicle battery. In Proceedings of the 48th International Universities’ Power Engineering Conference (UPEC), Dublin, Ireland, 2–5 September 2013. [Google Scholar]
- Deutsches Elektronen-Synchrotron DESY. Fast Charging Cycles Make Batteries Age More Quickly: X-ray Study IMAGES Damage in Lithium-Ion Batteries. Science Daily. April 2015. Available online: www.sciencedaily.com/releases/2015/04/150414094117.htm (accessed on 24 May 2018).
- Chandrasekaran, R. Quantification of Bottlenecks to Fast Charging of Lithium-Ion-Insertion Cells for Electric Vehicles. J. Power Sources 2014, 271, 622–632. [Google Scholar] [CrossRef]
- Abu Qahouq, J.; Xia, Z. Single-Perturbation-Cycle Online Battery Impedance Spectrum Measurement Method with Closed-Loop Control of Power Converter. IEEE Trans. Ind. Electron. 2017, 64, 7019–7029. [Google Scholar] [CrossRef]
- Kong, P.Y.; Karagiannidis, G. Charging Schemes for Plug-In Hybrid Electric Vehicles in Smart Grid: A Survey. IEEE Access 2016, 4, 6846–6875. [Google Scholar] [CrossRef]
- Whitney, L. Tesla Demos Electric Battery Swap in Just 90 Seconds. CNET, June 2013. Available online: https://www.cnet.com/news/tesla-demos-electric-battery-swap-in-just-90-seconds/ (accessed on 24 May 2018).
- Miller, J.M.; Jones, P.T.; Li, J.M.; Onar, O.C. ORNL Experience and Challenges Facing Dynamic Wireless Power Charging of EV’s. IEEE Circuits Syst. Mag. 2015, 15, 40–53. [Google Scholar] [CrossRef]
- Zhu, Q.; Wang, L.; Liao, C. Compensate Capacitor Optimization for Kilowatt-Level Magnetically Resonant Wireless Charging System. IEEE Trans. Ind. Electron. 2014, 61, 6758–6768. [Google Scholar] [CrossRef]
- Luo, Z.; Wei, X. Analysis of Square and Circular Planar Spiral Coils in Wireless Power Transfer System for Electric Vehicles. IEEE Trans. Ind. Electron. 2018, 65, 331–341. [Google Scholar] [CrossRef]
- Dang, Z.; Cao, Y.; Abu Qahouq, J.A. Reconfigurable Magnetic Resonance-Coupled Wireless Power Transfer System. IEEE Trans. Power Electron. 2015, 30, 6057–6069. [Google Scholar] [CrossRef]
- Tenergy Corp. Tenergy Cylindric Lithium-Ion Cell 30005-0 Datasheet; Tenergy Corp.: Fremont, CA, USA, 2010. [Google Scholar]
- Wurth Electronics Inc. WE-WPCC Wireless Power Transfer Transmitter Coil, Datasheet of Manufacturer Part Number 760308100110. Available online: http://www.we-online.com/ (accessed on 24 May 2018).
- Texas Instruments Inc. Datasheet of CC3200 Microcontroller. Available online: http://www.ti.com/lit/ds/symlink/cc3200.pdf (accessed on 24 May 2018).
- TP-Link Inc. Datasheet of Router TL-WR841N. Available online: http://static.tp-link.com/res/down/doc/TL-WR841N_V9_UG.pdf (accessed on 24 May 2018).
- Bluetooth, Wikipedia, the Free Encyclopedia. Available online: https://en.wikipedia.org/wiki/Bluetooth (accessed on 24 May 2018).
- Wi-Fi Direct, Wikipedia, the Free Encyclopedia. Available online: https://en.wikipedia.org/wiki/Wi-Fi_Direct (accessed on 24 May 2018).
- Nissan Motor Company Ltd. Nissan Leaf 2018. Available online: https://www.nissanusa.com/vehicles/electric-cars/leaf.html (accessed on 2 July 2018).
- AESC Corporation, Cell, Module and Pack for EV Applications. Available online: http://www.eco-aesc-lb.com/product/liion_ev/ (accessed on 2 July 2018).
- PUSHEVS, 2018 Nissan Leaf Battery Real Specs. Available online: https://pushevs.com/2018/01/29/2018-nissan-leaf-battery-real-specs/ (accessed on 2 July 2018).
- Tran, D.H.; Choi, W. Design of a High-Efficiency Wireless Power Transfer System with Intermediate Coils for the On-Board Chargers of Electric Vehicles. IEEE Trans. Power Electron. 2018, 33, 175–187. [Google Scholar] [CrossRef]
- Zhang, X.; Yuan, Z.; Yang, Q.; Li, Y.; Zhu, J.; Li, Y. Coil design and efficiency analysis for dynamic wireless charging system for electric vehicles. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.; Kong, S.; Kim, H.; Suh, I.S.; Suh, N.P.; Ahn, S. Coil design and shielding methods for a magnetic resonant wireless power transfer system. Proc. IEEE 2013, 101, 1332–1342. [Google Scholar] [CrossRef]
- Oak Ridge Nation Lab. 20 kW Wireless Car Charging at 90% Efficiency Achieved. Available online: https://insideevs.com/20-kw-wireless-car-charging-at-90-efficiency-achieved/ (accessed on 2 July 2018).
- Texas Instruments Inc. SimpleLink™ CC3100/CC3200 Wi-Fi Internet-on-a-Chip Networking Sub-System Power Management. Available online: http://www.ti.com/lit/an/swra462/swra462.pdf (accessed on 2 July 2018).
- Lindh, J.; Lee, C.; Hernes, M. “Measuring Bluetooth Low Energy Power Consumption”, Texas Instruments Application Note. Available online: http://www.ti.com/lit/an/swra478c/swra478c.pdf (accessed on 2 July 2018).
- Cyclic Redundancy Check, Wikipedia, the Free Encyclopedia. Available online: https://en.wikipedia.org/wiki/Cyclic_redundancy_check (accessed on 2 July 2018).
- Digital Signature, Wikipedia, the Free Encyclopedia. Available online: https://en.wikipedia.org/wiki/Digital_signature (accessed on 2 July 2018).
- Message Authentication Code, Wikipedia, the Free Encyclopedia. Available online: https://en.wikipedia.org/wiki/Message_authentication_code (accessed on 2 July 2018).
- Cryptographic Hash Function, Wikipedia, the Free Encyclopedia. Available online: https://en.wikipedia.org/wiki/Cryptographic_hash_function (accessed on 2 July 2018).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nissan Leaf 2018 Battery Pack Specifications [27,28,29] | WEDES System Design Example for Nissan Leaf 2018 | ||
|---|---|---|---|
| Battery cell | Cell type | AESC Lithium-ion battery [28] | AESC Lithium-ion battery [28] |
| Nominal voltage | 3.65 V | 3.65 V | |
| Nominal capacity | 56.3 Ah | 56.3 Ah | |
| Battery module | Connection within module | Each module has 8 cells 4s2p | Each module has 8 cells 4s2p |
| Nominal capacity | 450.4 Ah, ≈1.644 kWh | 450.4 Ah, ≈1.644 kWh | |
| Whole battery pack | Connection | 24 battery modules connected in series | 24 WEDES-MX battery modules that are not connected themselves but are connected in series at the receiving OBU after receiving power wirelessly |
| Power transfer type within system | Wired power transfer | Wireless power transfer | |
| kWh capacity | 8 × 24 × 3.65 × 56.3 = 39.455 kWh ≈ 1.644 kWh/module | 8 × 24 × 3.65 × 56.3 = 39.455 kWh ≈ 1.644 kWh/module | |
| Total output voltage (Vbus) | Not regulated ≈ 300 V–400 V range (≈350 V nominal) | Regulated at a desired value (e.g., 350 V) | |
| Nissan Leaf 2018 Battery Pack Specifications [27,28,29] | WEDES System Design Example for Nissan Leaf 2018 | ||
|---|---|---|---|
| Battery cell | Cell type | AESC Lithium-ion battery [28] | AESC Lithium-ion battery [28] |
| Nominal voltage | 3.65 V | 3.65 V | |
| Nominal capacity | 56.3 Ah | 56.3 Ah | |
| Battery module | Connection within module | Each module has 8 cells 4s2p | Each module has 16 cells 4s4p or 8s2p |
| Nominal capacity | 450.4 Ah, ≈1.644 kWh | 800.8 Ah, ≈3.288 kWh | |
| Whole battery pack | Connection | 24 battery modules connected in series | 12 WEDES-MX battery modules that are not connected themselves but are connected in series at the receiving OBU after receiving power wirelessly |
| Power transfer type within system | Wired power transfer | Wireless power transfer | |
| kWh capacity | 8 × 24 × 3.65 × 56.3 = 39.455 kWh ≈ 1.644 kWh/module | 16 × 12 × 3.65 × 56.3 = 39.455 kWh ≈ 3.288 kWh/module | |
| Total output voltage (Vbus) | Not regulated ≈ 300 V–400 V range (≈350 V nominal) | Regulated at a desired value (e.g., 350 V) | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abu Qahouq, J.; Cao, Y. Control Scheme and Power Electronics Architecture for a Wirelessly Distributed and Enabled Battery Energy Storage System. Energies 2018, 11, 1887. https://doi.org/10.3390/en11071887
Abu Qahouq J, Cao Y. Control Scheme and Power Electronics Architecture for a Wirelessly Distributed and Enabled Battery Energy Storage System. Energies. 2018; 11(7):1887. https://doi.org/10.3390/en11071887
Chicago/Turabian StyleAbu Qahouq, Jaber, and Yuan Cao. 2018. "Control Scheme and Power Electronics Architecture for a Wirelessly Distributed and Enabled Battery Energy Storage System" Energies 11, no. 7: 1887. https://doi.org/10.3390/en11071887
APA StyleAbu Qahouq, J., & Cao, Y. (2018). Control Scheme and Power Electronics Architecture for a Wirelessly Distributed and Enabled Battery Energy Storage System. Energies, 11(7), 1887. https://doi.org/10.3390/en11071887