1. Introduction
Enormous mineral resources are deposited in the international seabed, of which polymetallic nodules have attracted more and more attention around the world for their high economic value and easy prospecting. With increasing demand for various mineral resources and gradual exhaustion of land resources in modern society and industry, research and development of seabed mineral resources is becoming increasingly urgent [
1]. Therefore, deep sea mining is thought to be a key approach to the sustainable development of human beings and many countries around the world are stepping up exploration and exploitation of seabed mineral resources [
2,
3]. Most of the deep sea mining technologies and systems for exploration, recovery and processing were originally been done in the 1970s. Four subsystems are usually included in deep sea mining systems: surface systems, pipe systems, buffer systems and collector systems [
4]. Chung [
5,
6] presented a brief summary of the developments in mining systems and technologies in the past years, and pointed out that the mobility, safety, collection efficiency and sweep efficiency of the collector system are the most important parameters in deep sea mining system design. The collecting part in the miner system is also considered as the key technology, because commercial production must achieve high sweep efficiency [
7], and profitable deep sea mining exploitation is only feasible on the premise that there is a nodule collector with maximum collecting capacity of 140 kg of wet nodules per second [
8]. Except for the high collecting efficiency, eco-friendly mining processes are also in demand because deep sea mining could be a new environmental challenge related to ocean biology [
9,
10]. To pick up nodules, a variety of collecting methods such as hydraulic methods, mechanical methods and hybrid collection methods have been developed. Ocean Management Incorporated (OMI’s) sea trial results in 1978 showed that the hydraulic method has higher collection efficiency than the mechanical method [
11]. Therefore, the problem of hydraulic collecting will be studied in this paper.
The mechanism of hydraulic collecting is fairly complicated because the collecting efficiency is influenced by a lot of factors such as particle size, bottom clearance, collector structure and flow rate. Several studies have been conducted to examine the process of hydraulic collecting. Hong et al. [
12] dealt with experimental approaches for enhanced understanding of the hydraulic performance of a hybrid pick-up device. The experiments were conducted in a 2-D flume tank. By parametric experiments they found position and shape of baffle plates are significant factors for effective design of hydraulic nodule lifter. Yang et al. [
13] discussed major parameters and their influences on the performance of the pick-up device by tests. The results showed that the hydraulic pick-up device with proper dimensions and parameters could get high pick-up rate and low content sediments. Tsutsui [
14] had an experimental study of the flow field and the aerodynamic force on a sphere above a plane. The surface pressures on the sphere and the plane were measured by inclined multi-pipe manometers and the results were compared with photographs showing the flow visualization of the sphere. Lim et al. [
15] analyzed flow field characteristics with outflow discharge from a collecting device in deep ocean by using software FLUENT. The study revealed seawater velocity and streamline distributions along with complicated flow characteristics downstream including nodule particles behavior. Zhao et al. [
16] carried out studies of hydraulic collection of single spherical particle at various collecting bottom clearances and flow rates by both experiments and numerical simulations. It was verified that the vertical force prediction is feasible for single ore particle in collecting condition based on numerical simulation. The study revealed that the variation of the wake vortex is the dominant factor of force vibration.
The problems of hydraulic lifting have been studied, which could be helpful to understand the process of hydraulic collecting. Chung et al. [
17] conducted experimental investigations to study the shape effect of solids on pressure drop in a 2-phase vertically upward transport. Sobota et al. [
18] had an experimental study on nodule and water velocities at upward flow in a pipeline of
D = 150 mm. The slip velocity values of 10-, 30- and 50-mm-dimeter nodules at the volume concentration 10% were measured. The results illustrated that the slip velocity values are of the same order as the fall velocity of these solids. Jiang et al. [
19] had an investigation into the concentration characteristics of large size particles in vertical pipes for hydraulic lifting. Particles of different diameters (5–30 mm) were used for experimental studies. A formula for the radial distribution of particle concentration was developed and validated. Jiang et al. [
20] did the experiments on single particle settling velocity in the static fluid, floating velocity for a single particle and critical velocity in a vertical hydraulic lifting system. They had found that the larger the size and concentration of particles were, the more possibly the particles moved to the pipe wall. Yang et al. [
21] analyzed the influence of factors such as particle concentration, diameter, gradation and boundary conditions on single and group suspension velocity by doing numerous experiments. A relation between particle group and single particle suspension velocity ratio and volumetric concentration was given. Behavior of single particle in vertical lifting pipe is the foundation of the group particles in vertical lifting pipe. In addition, the studies of deep sea air-lift have been researched. Fan et al. [
22] investigated the performance of an air-lift pump for artificial upwelling of deep water theoretically and experimentally with a vertical pipe of 0.4 m diameter and 28.3 m height. An empirical model of the air-lift artificial upwelling is presented. The performance of the model has been confirmed by the experimental findings. Pougatch et al. [
23] presented a numerical model of the three-phase flow in the upward air-lift pipe. And the influence of the pipe diameter on the lifting efficiency has been investigated numerically. Ma et al. [
24] assessed the technological feasibility and profitability analyses in terms of solid production rate, energy consumption per tonnage of mineral, and profitability per tonnage of mineral. The effects of submergence ratio, pipe diameter, particle diameter, mining depth, and gas flux rate are investigated.
The research of flow around a sphere is the foundation of study on hydraulic collecting. Achenbach [
25] had experiments on the flow past spheres in the Reynolds number range 5 × 10
4 ≤
Re ≤ 6 × 10
4. He compared his results with other available data and pointed out the dependence of friction forces on Reynolds number. Johnson and Patel [
26] investigated the flow of an incompressible viscous fluid past a sphere at different Reynolds numbers by Detached Eddy Simulation (DES). Constantinescu and Squires [
27] applied Large Eddy Simulation (LES) and DES to investigate the flow around a sphere at a Reynolds number of 10,000 in the subcritical regime.
Collecting efficiency and environmental issues from the collecting process are the biggest challenges for deep sea mining. Therefore, providing sufficient suction force and avoiding unnecessary disturbance by predicting the performance of collecting accurately is very important. In view of the previous studies including experiments and numerical simulations, however, there are few studies treated the mechanism study of hydraulic collecting and the research of collecting performance prediction.
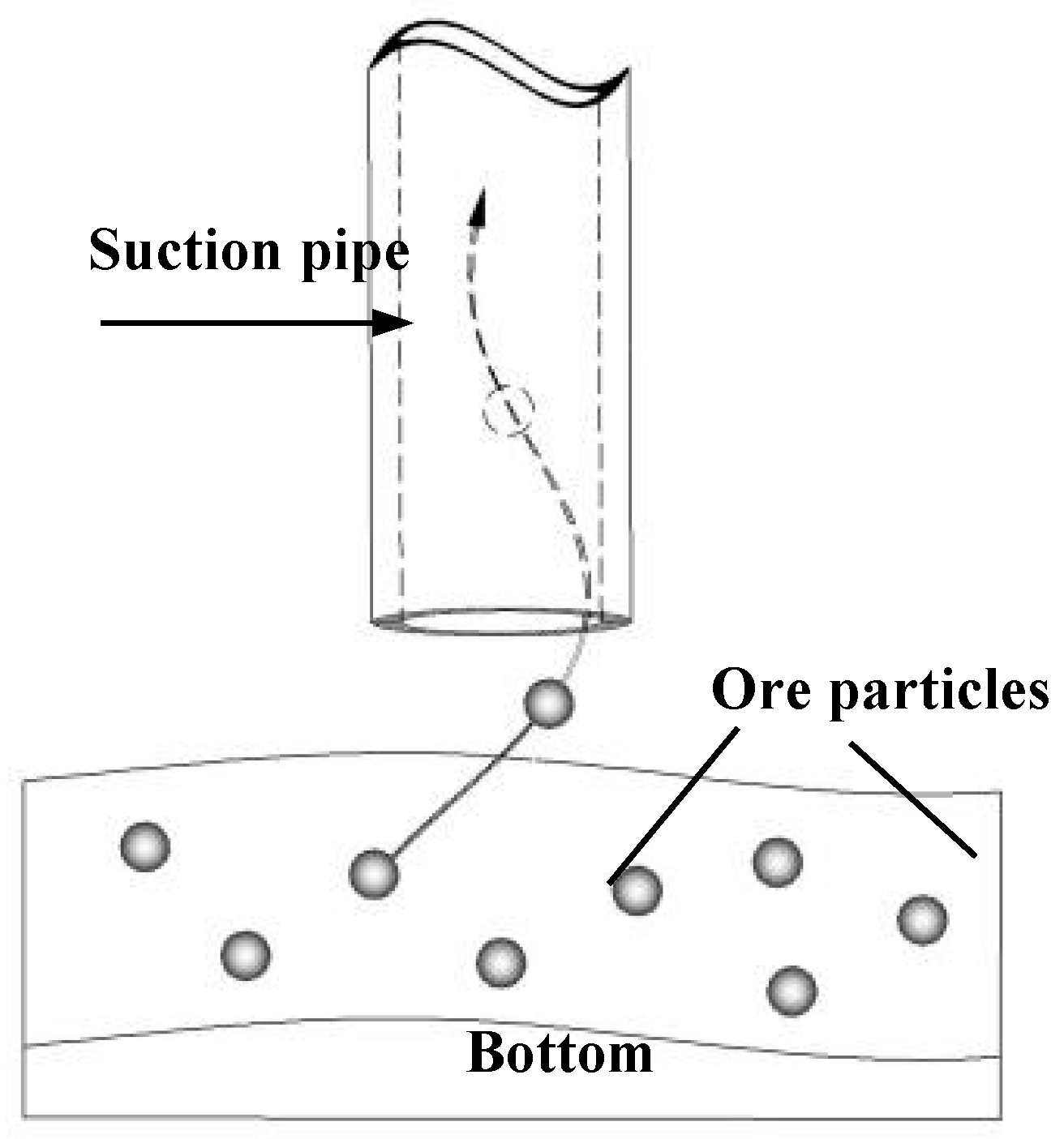
In this study, mechanism of hydraulic collecting is researched by dimensional analysis and experiments. The characteristics of vertical force, vertical incipient motion and wake flow of spherical particles in suction flow field have been investigated. The empirical formula of vertical force of particles is obtained from measurements and further verified by the vertical incipient motion tests. Furthermore, the criterion-formula of vertical incipient motion of particles is derived to predict the collecting performance. The characteristics of flow field were observed by flow visualization tests. The results of this study will serve to further understand the hydrodynamic characteristics of the hydraulic collecting in deep sea mining and provide reference for the design of the deep sea miner collector.
3. Experimental Description
In order to investigate the characteristics of ore particles in the suction flow field, the test system has been designed and constructed in the laboratory and three kinds of experiments are carried out: (1) vertical force tests: to measure the vertical force of particles in various cases; (2) vertical incipient motion tests: to measure the critical bottom clearances of particles and further validate the accuracy of the vertical force tests; (3) flow visualization tests: to observe the characteristics of flow field around the particle.
3.1. Test Set Up
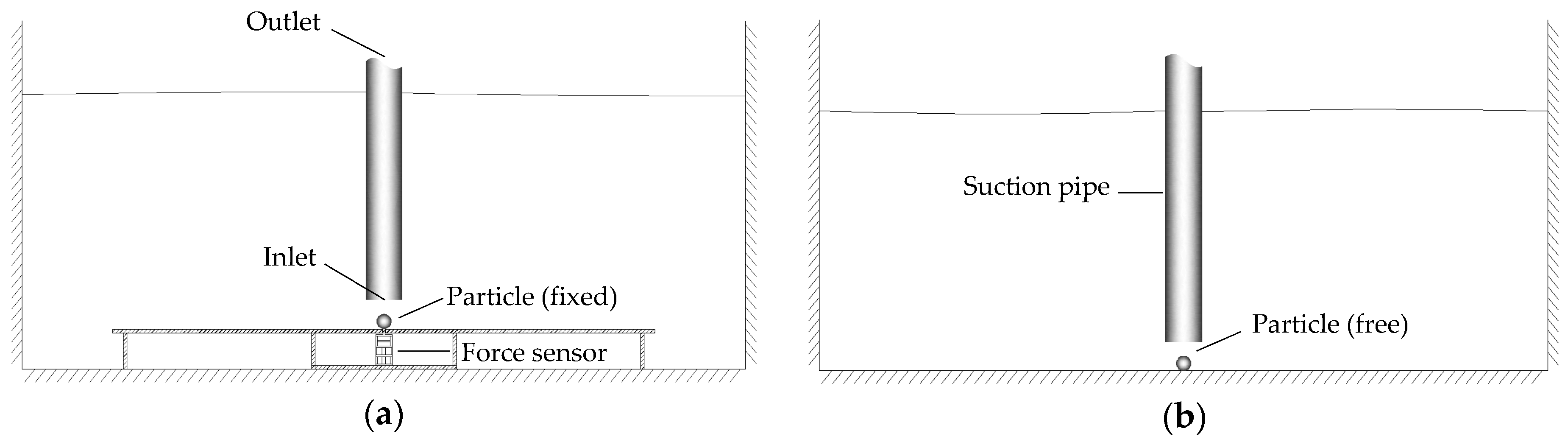
Figure 5 is the sketch of vertical force tests. In
Figure 5a, the spherical particle is fixed on the three-component force sensor, separated by an intermediate acrylic board. Tests aimed to measure the vertical force of the particle without relative velocity with the pipe. In
Figure 5b, the spherical particle is free on the bottom to measure the vertical incipient motion clearance in suction flow field. The particle is also still relative with the pipe before starting to lift in most tests. But in some exception, the particle will rotate around a vertical axis on the bottom and the phenomenon will be discussed later.
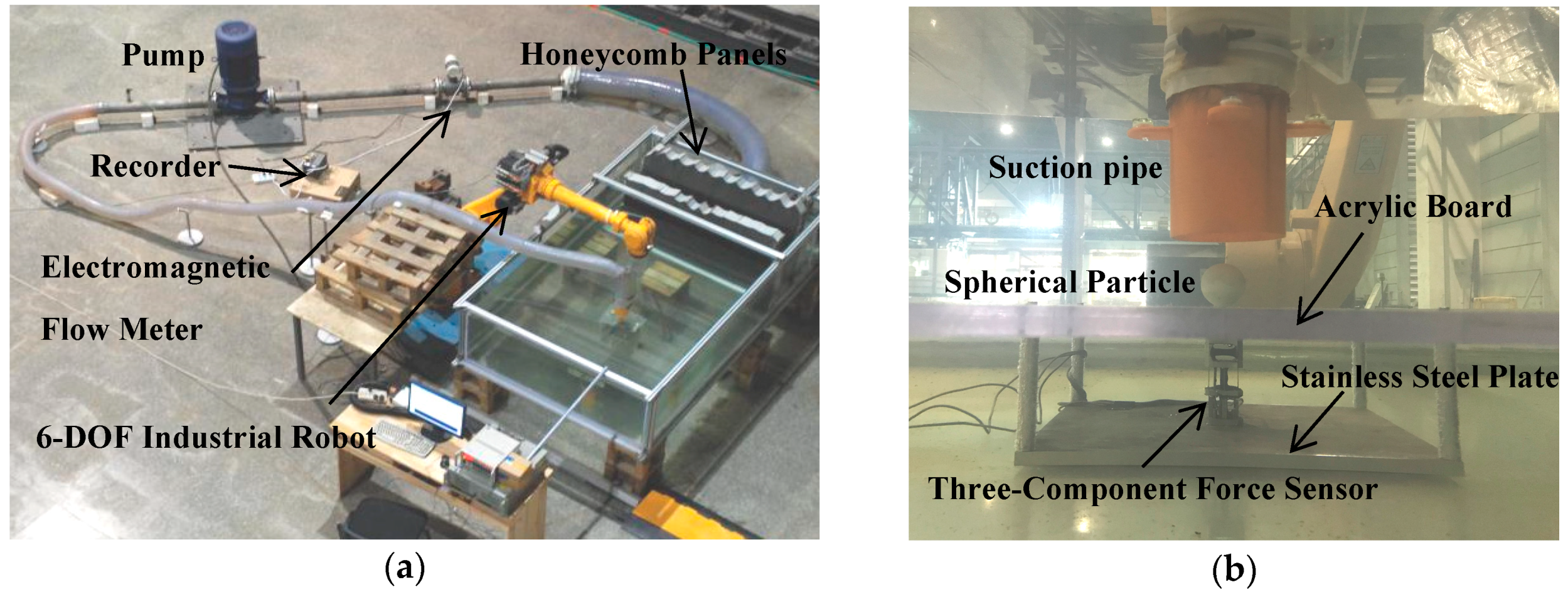
The whole test system consists of three parts: suction, movement and measurement as shown in
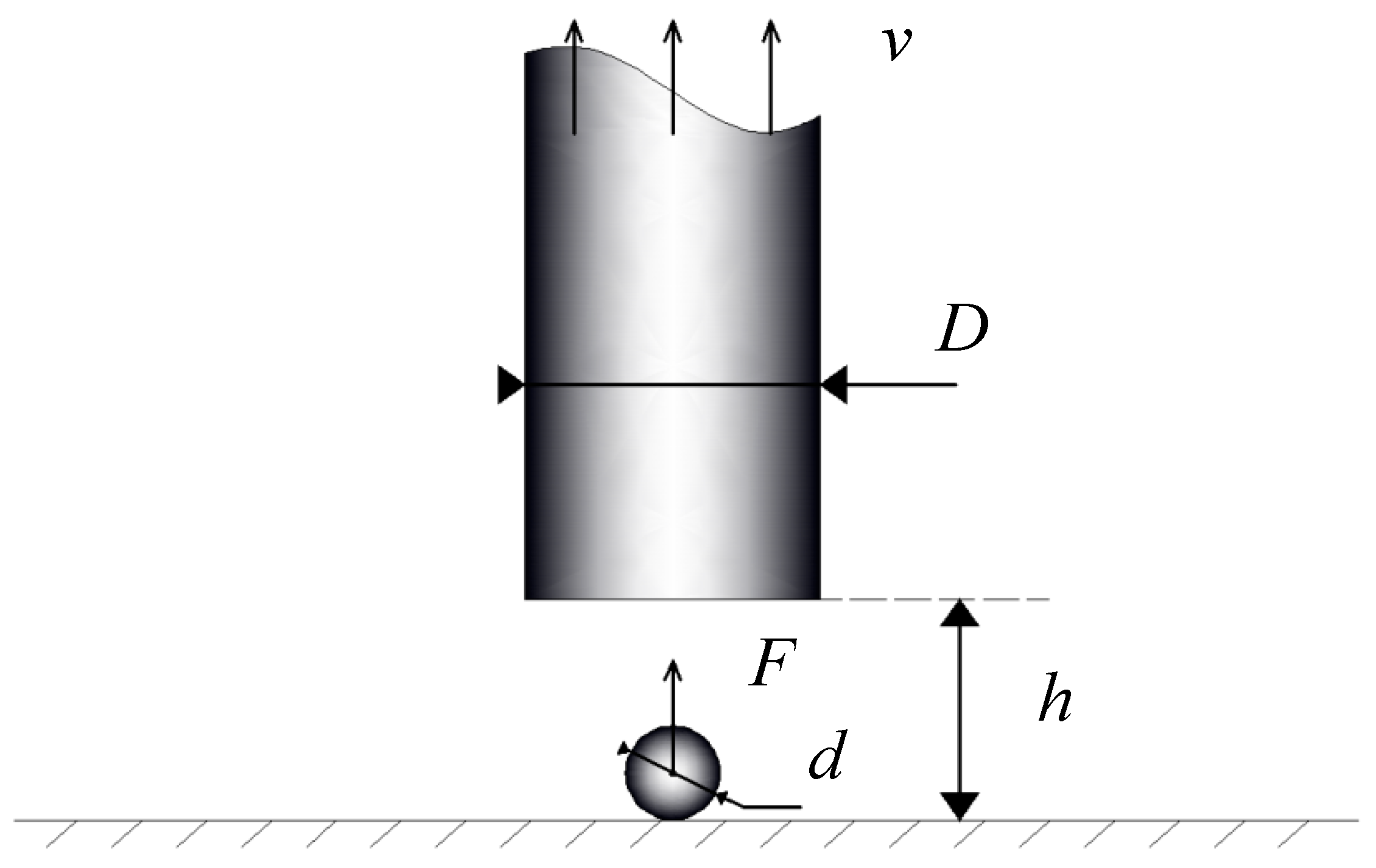
Figure 6. The suction part is mainly composed of glass flume and pump circulation device. The size of glass flume is 2.5 m × 1.5 m × 1.0 m. The water in the flume is connected to the pump through a pipe, in which the rated power is 22 kW and the maximum flow rate is 100 t/h. The LDG-SIN-DN100 electromagnetic flow meter (made by MEACON, Hangzhou, Zhejiang, China) is installed at the outlet of the pump to measure the flow rate through the pump. Considering the fact that the flow rate at the inlet of the pipe is almost the same as the measured one, the average flow velocity is calculated and called flow velocity in pipe. In addition, a 0.7 m baffle is installed and two parallel honeycomb plates are placed to weaken the impact of water wave on force measurement. The movement part is composed of an ER50-C10 six-degree-of-freedom robot (made by Effort, Wuhu, Anhui, China), whose lower arm is fixed to the inlet of the pipe. By adjusting the motion of the mechanical arm to change the position of the pipe entrance, the precision can reach 0.01 mm and 0.01°. The measurement part adopts three-component force sensor. The top of the sensor is rigidly connected with the measured particle, and its bottom is rigidly connected to the stainless-steel plate placed on the bottom of the flume. In addition, an acrylic plate is installed under the particle, so that the acrylic plate can be considered as a boundary, and the force sensor has no effect on the flow field above the plate. In the experiment, the vertical distance between the inlet and the particle is measured as the vertical distance between the bottom of pipe and the acrylic plate, and it is defined as the bottom clearance
h.
The force sensor is connected with the data acquisition system, and it can measure the data of the vertical suction force of the particles within a period of time. To ensure the accuracy of the measurement results, the layout structure of force sensor in the experiment has been improved many times, and the system tolerance is successfully maintained within 1%. In addition, in previous tests, it was found that if the measured particle is too heavy or too light, it will cause an oscillation of the measured value. Therefore, the particles used in the vertical force tests are designed to balance their buoyancy with the proper gravity, so that the measurement results can be more accurate.
In each of the test cases, the critical bottom clearance
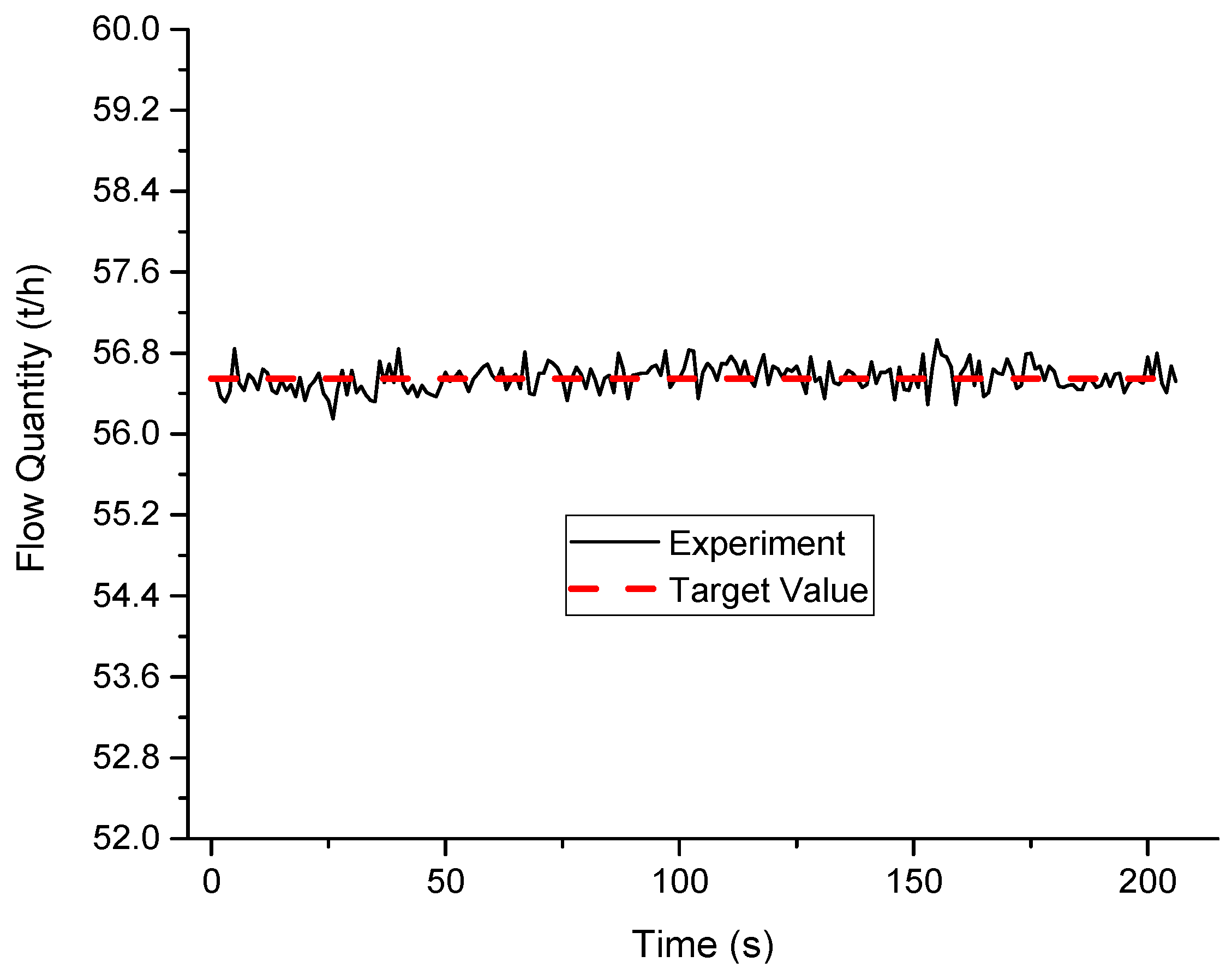
h was determined for the incipient motion of particles by accurately controlling the position of the ER50-C10 robot. The flow velocity is measured by the electromagnetic flow meter and shows the value of quantity of flow.
Figure 7 shows the experimental value in the recorder of the flow in the pipe for a period of 200 s. The red line in the figure means that the target value of the flow quantity is 56.55 t/h in terms of the specified flow velocity. In comparison, the tolerance between the average of the experimental value and the target value is within 0.3%. The standard deviation is 0.1323 t/h, which is 0.2% of the target value of flow quantity. Thus the tolerance of flow velocity is small enough and can be acceptable in this study.
3.2. Test Program
To examine the effects on Cvs of Re, h/d, D/d and other parameters, a series of values of each factor has been chosen. The diameters of suction pipe are 0.075 m, 0.1 m and 0.125 m, and the diameter of spherical particles are 0.032 m, 0.036 m and 0.040 m. In total, 234 cases were carried out with 3~5 flow velocities in pipe ranging from 1 m/s to 2 m/s. In this range, the vertical forces of particles can be bigger and smaller than its weights in water. Moreover, each case was repeated three times with 3 min each time. The water temperature in this study is 10 °C and the dynamic viscosity coefficient μ equals 1.308 × 10−3 Pa·s. Therefore the range of dimensionless parameters can be determined. The range of Re is from 30,581 to 61,162, the range of D/d is from 1.875 to 3.906, and the range of h/d is from 1.389 to 2.375.
To obtain the incipient motion characteristics of spherical particles in suction flow field and further validate the accuracy of the vertical force tests, a total of 18 cases of vertical incipient motion tests were carried out with different parameters, as shown in
Table 2. Each test was repeated ten times to measure the bottom clearance of vertical incipient motion of the particles when they were lifted into the suction pipe. The single particle is free on the bottom and right below the suction pipe.
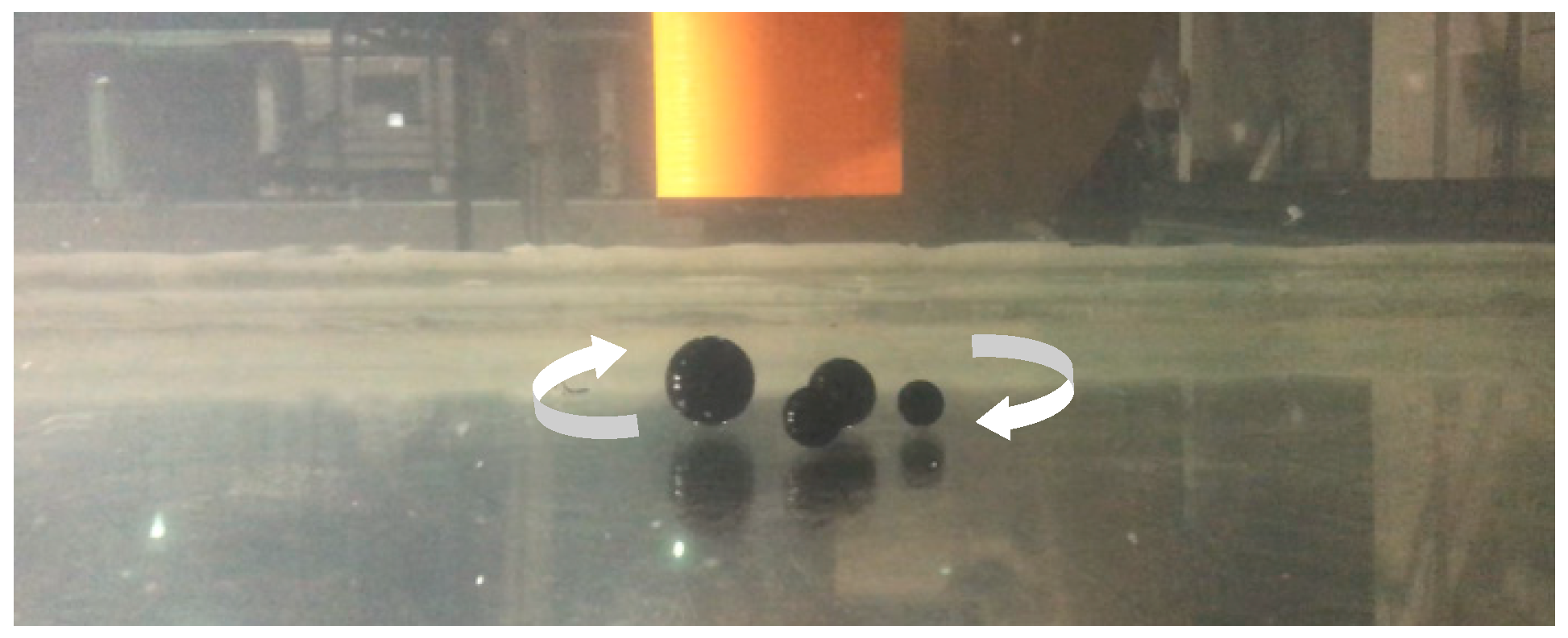
In addition, more vertical incipient motion tests of single and multiple particles were carried out to study the relations between the vertical incipient motion characteristics of single and multiple particles, such as the critical bottom clearance of each particle and the sequence of each particle to be lifted. Each test was also repeated ten times to measure the bottom clearance and the sequence of lifted particles. The parameters are listed in
Table 3.
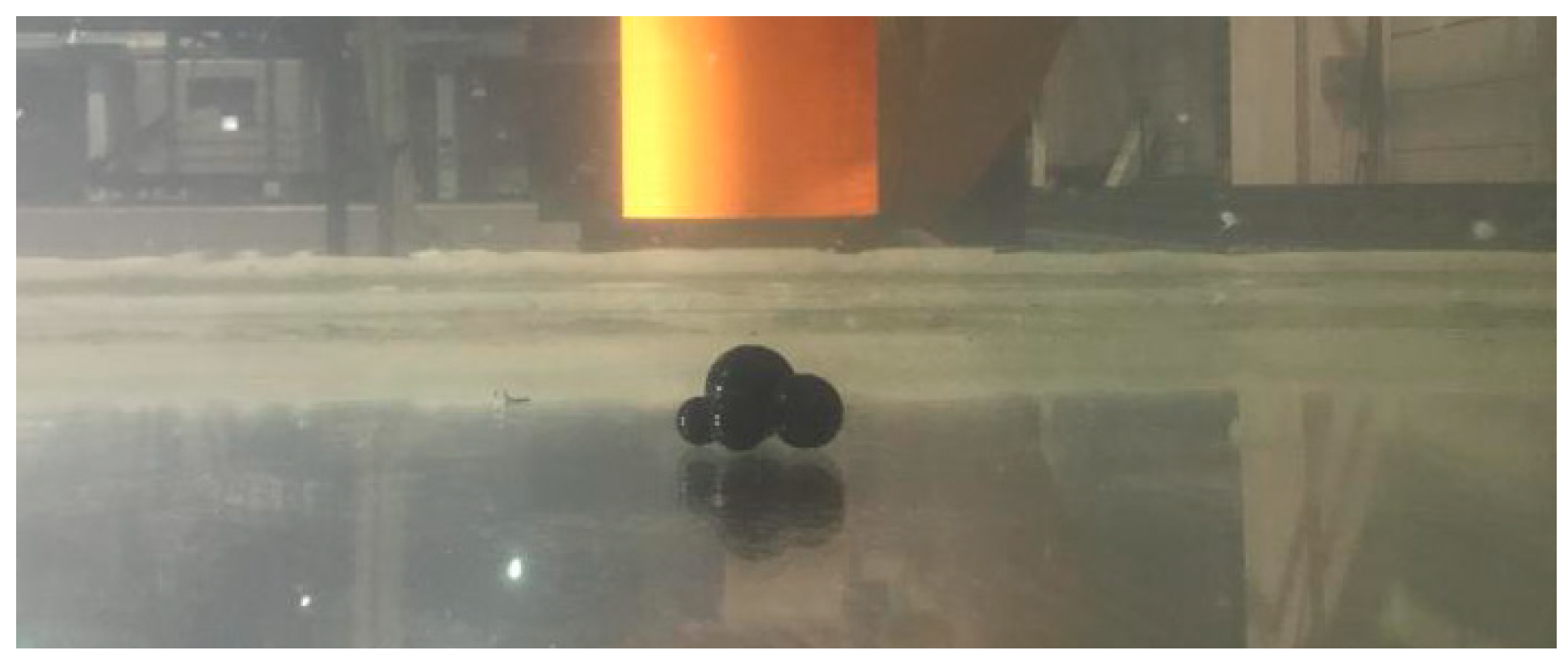
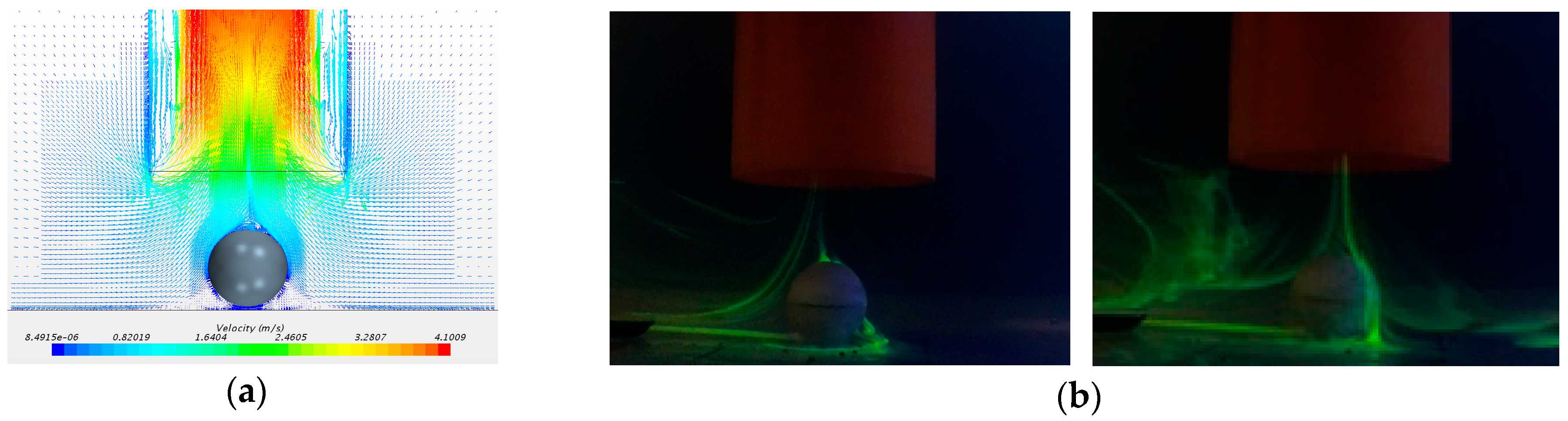
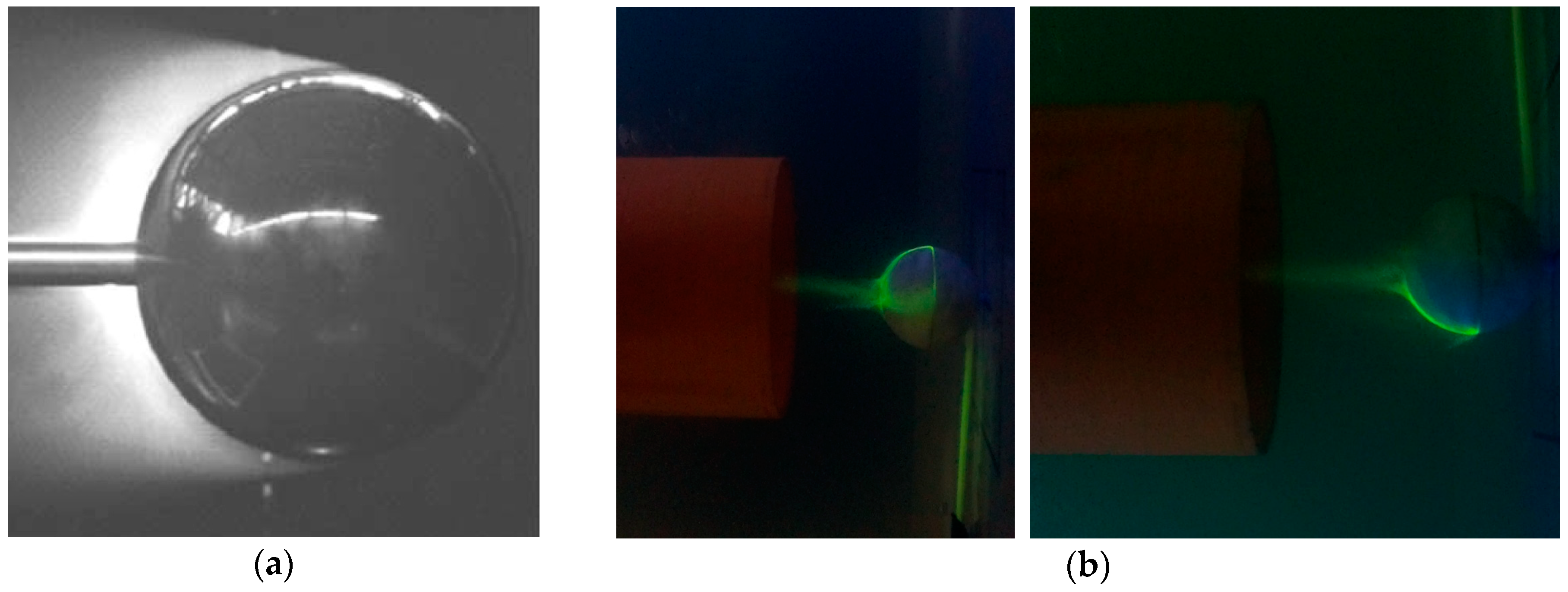
Flow visualization tests were carried out to observe the characteristics of suction flow field. To compare with the results in references [
16,
34], the test cases are set as
Table 4.
5. Conclusions
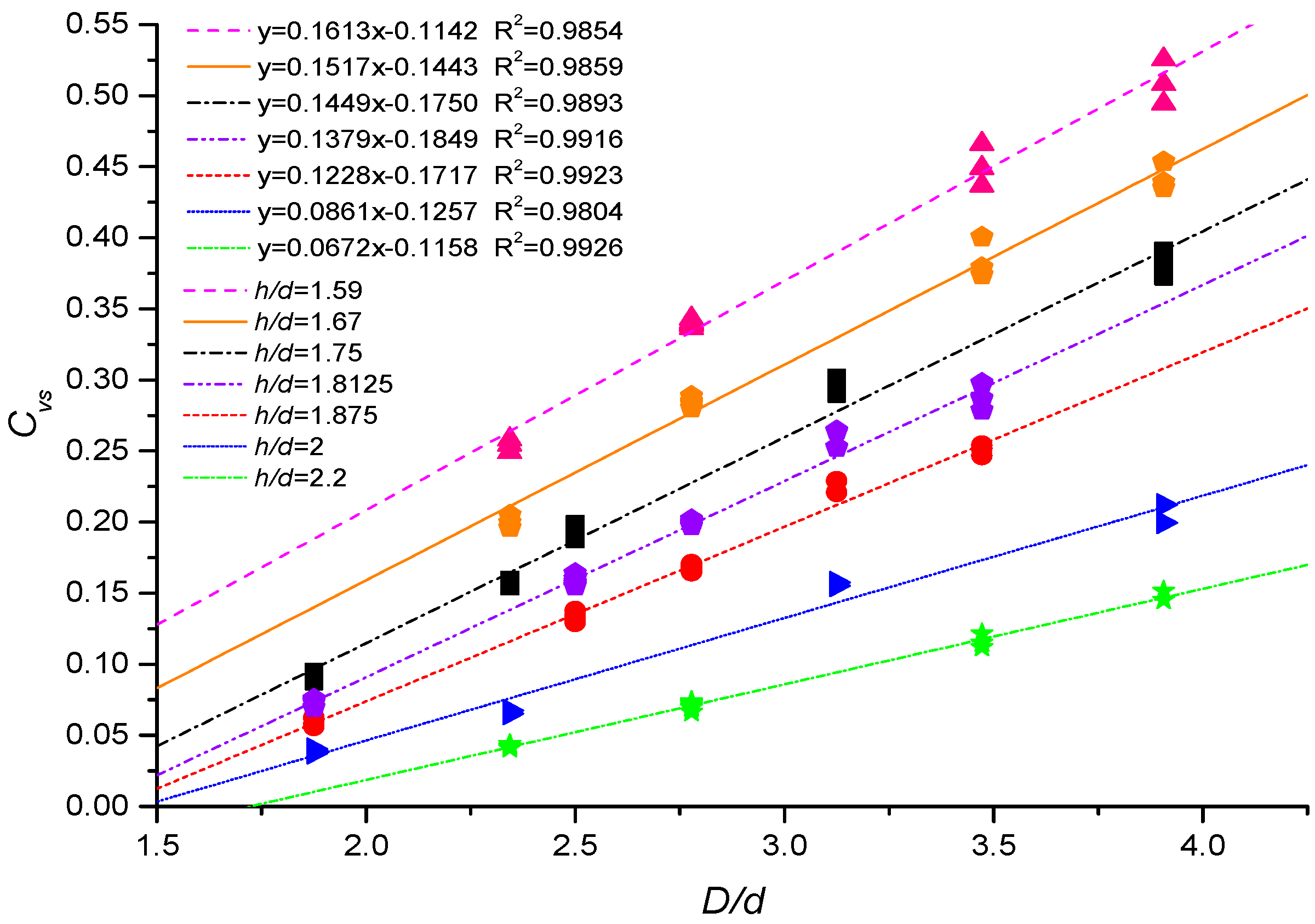
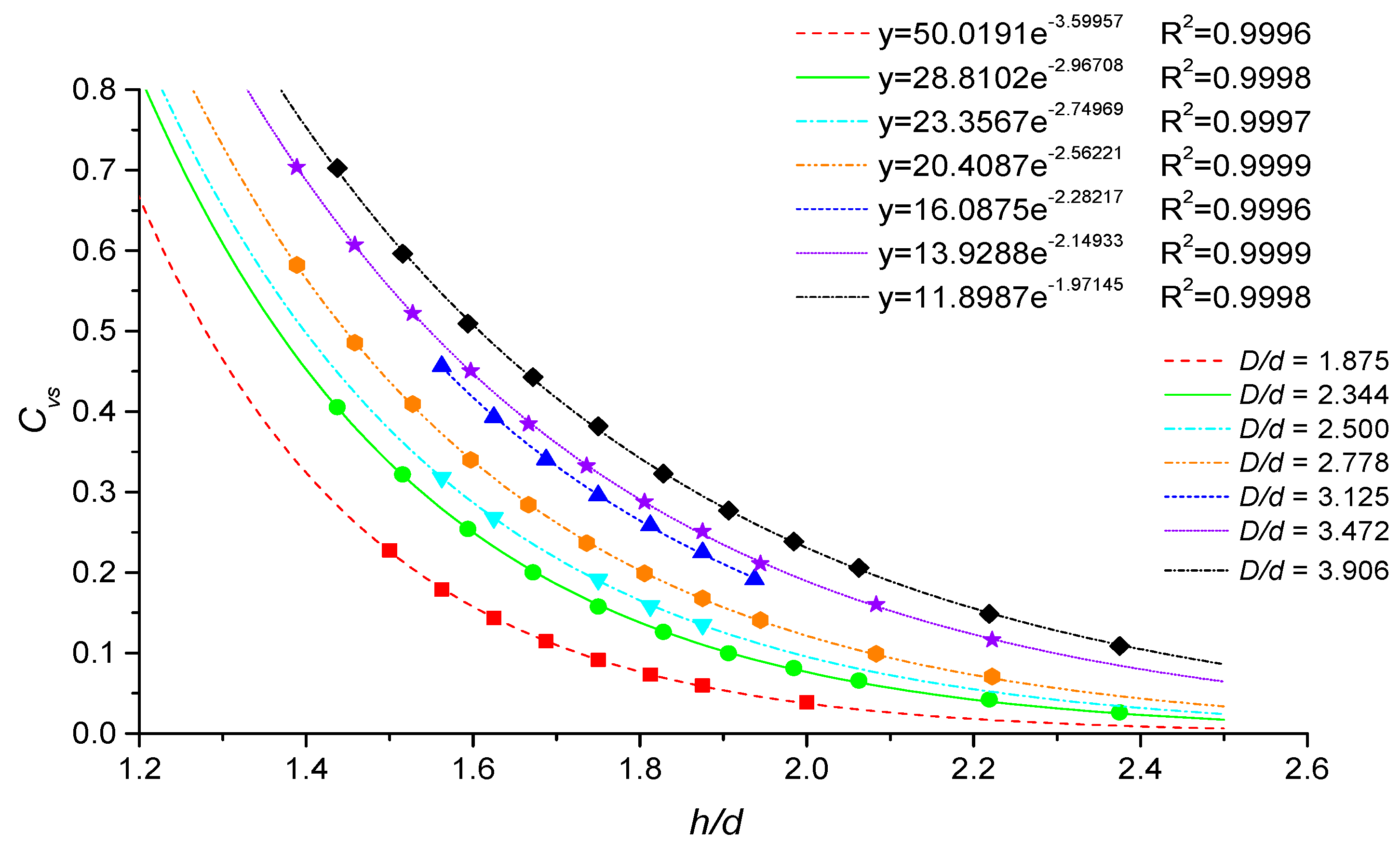
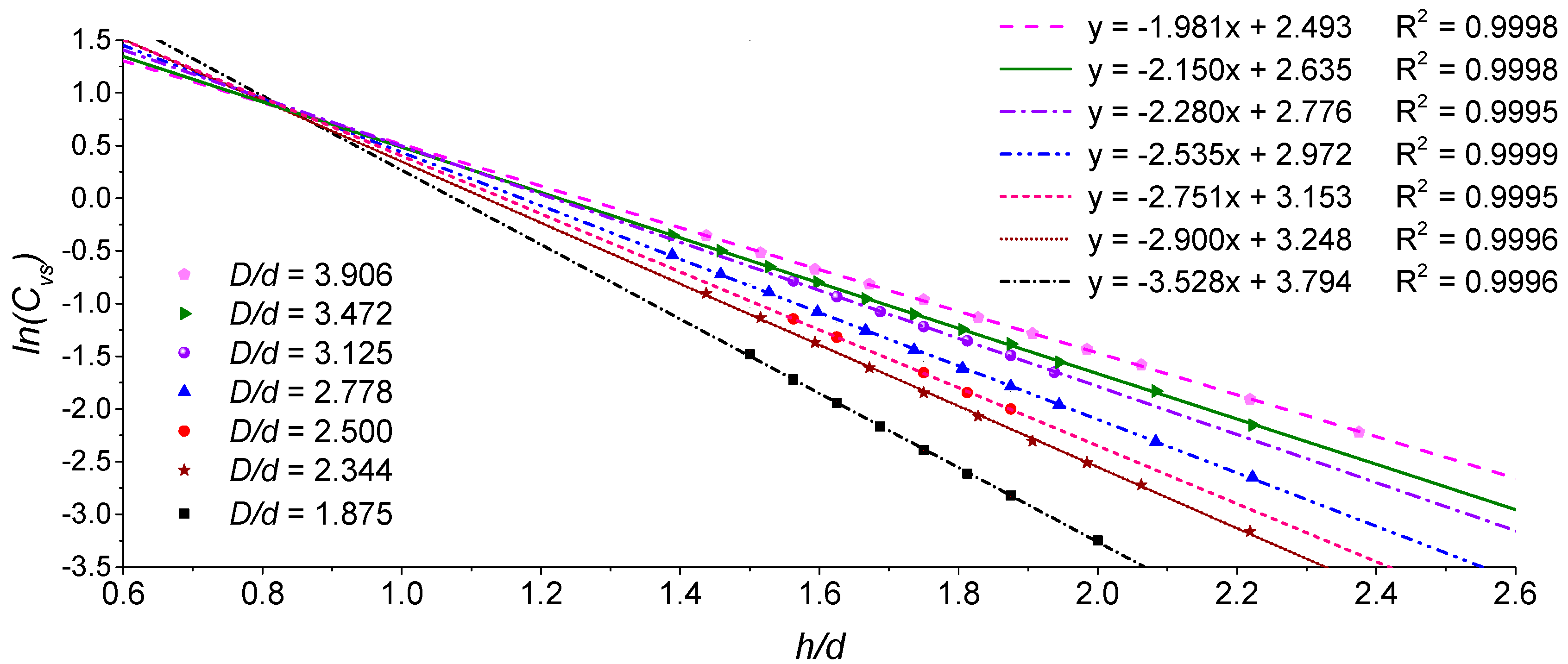
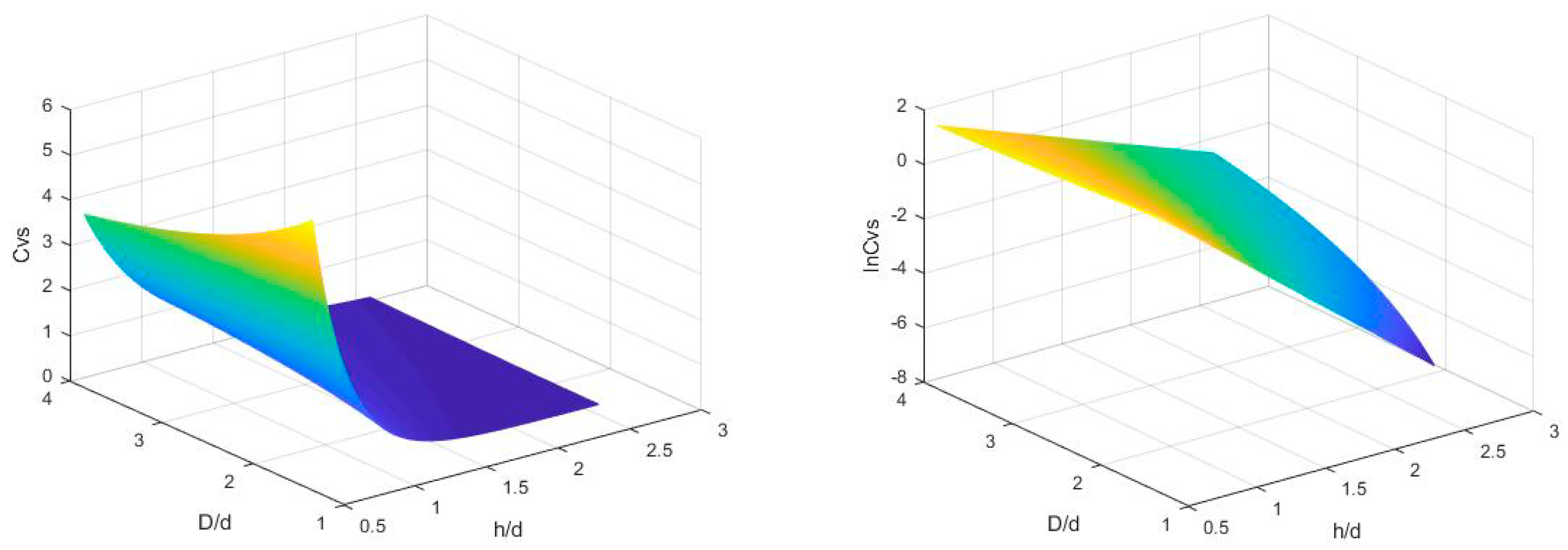
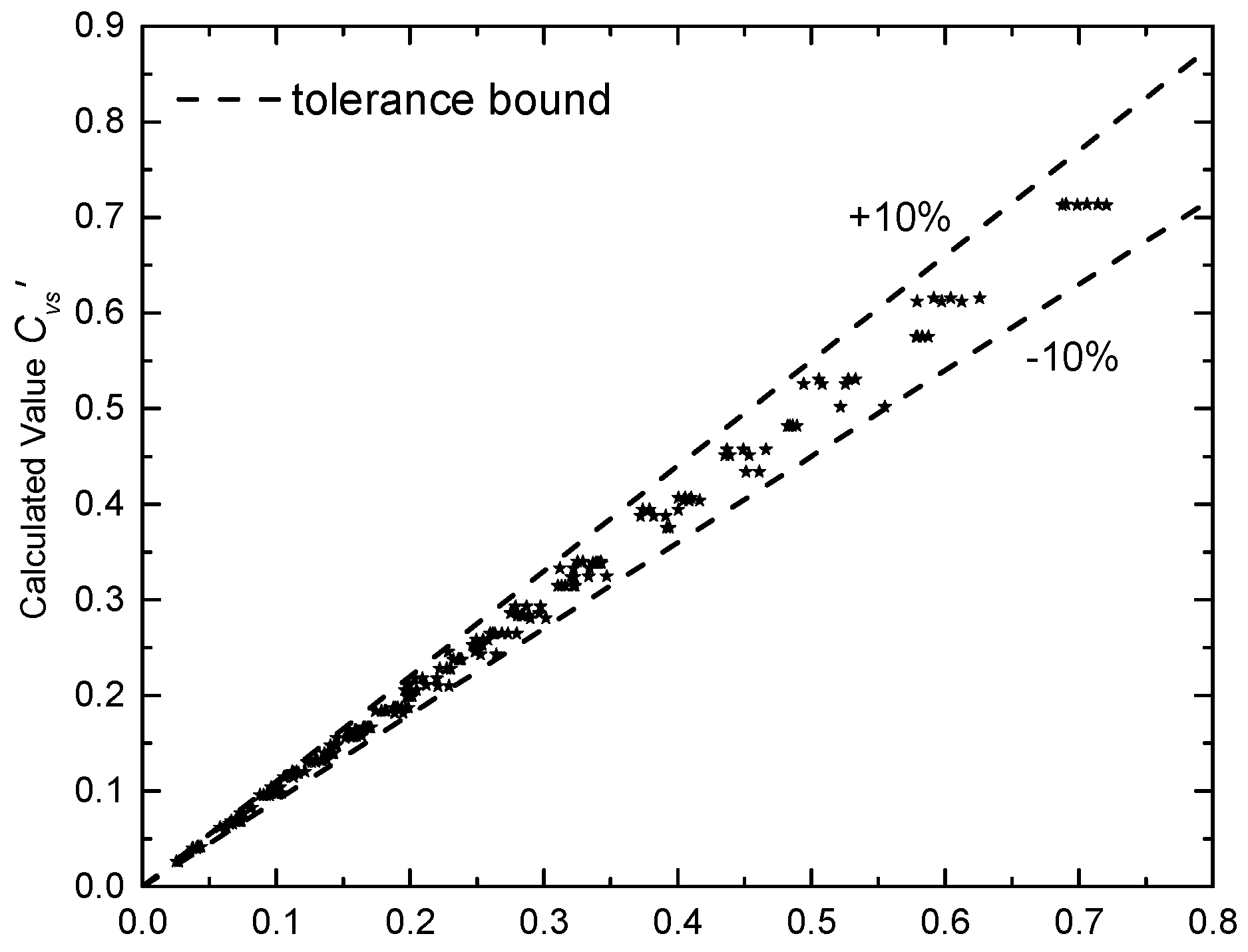
The mechanism of hydraulic collecting is researched by dimensional analysis and experimental studies. The experimental system is established in laboratory to carry out three kinds of tests including 253 different test cases. The results show that the vertical suction force coefficient (Cvs) decreases exponentially with the ratio of bottom clearance to diameter of the particle (h/d, range from 1.875 to 3.472), increases linearly with the ratio of diameter of the suction pipe to diameter of the particle (D/d, range from 1.875 to 3.472), and is nearly independent of Reynolds number (Re, range from 30,581 to 61,162). The empirical formula of vertical force of particles is obtained with respect to h/d and D/d, and the maximum tolerance is less than 10%.
The empirical formula of vertical force of particles in suction flow field is further verified by the vertical incipient motion tests. The criterion-formula of vertical incipient motion of particles is obtained to predict the collecting performance with the maximum tolerance less than 15%. As a result, it is feasible to provide sufficient suction force and avoid unnecessary disturbance by predicting the performance of collecting accurately. By comparing experiments on single and multiple particles, the correspondence of both incipient motion characteristics is obtained, and thus the research on a single particle could reveal some principles of multiple particles. In addition, the phenomenon that the vortex could help strengthen the suction force is observed in the tests.
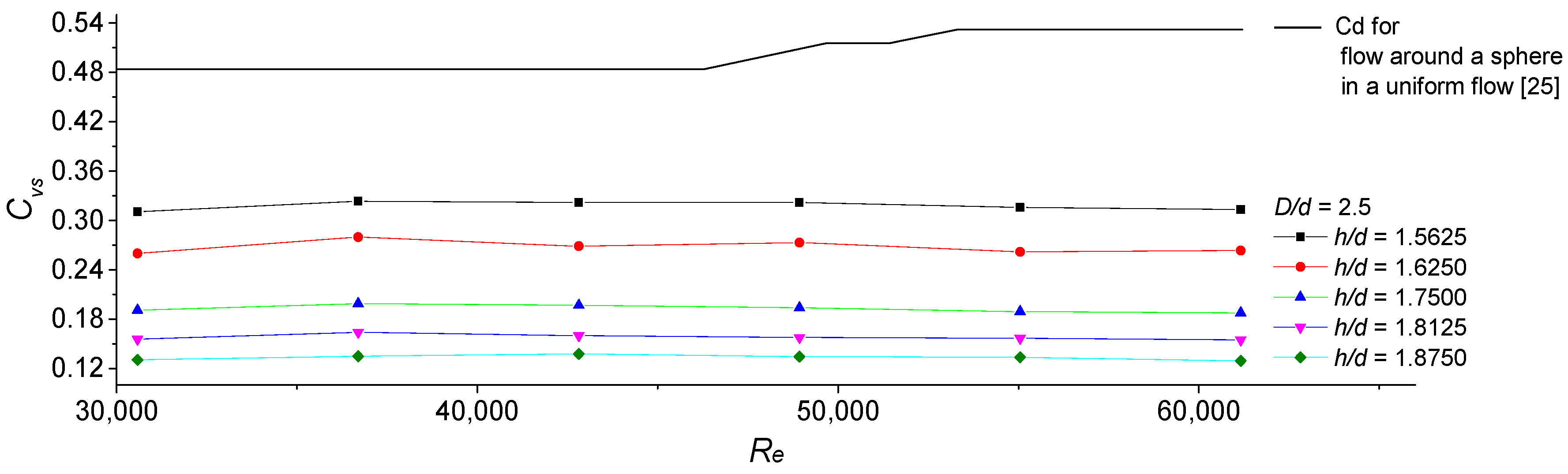
The characteristics of suction flow field were observed by flow visualization tests. It is found that the wake vortex separation point is near the top of the particle and very small area on the particle is influenced by the unstable wake vortex. This physical phenomenon could contribute to the result that the Cvs in a suction flow is much smaller than the Cd in a uniform flow and explain why the flow field around the particle is stable enough to guarantee the good repeatability in tests.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}