Comprehensive Design and Analysis of a State-Feedback Controller for a Dynamic Voltage Restorer

 ,
,
Abstract
:1. Introduction
2. DVR Modeling and Control
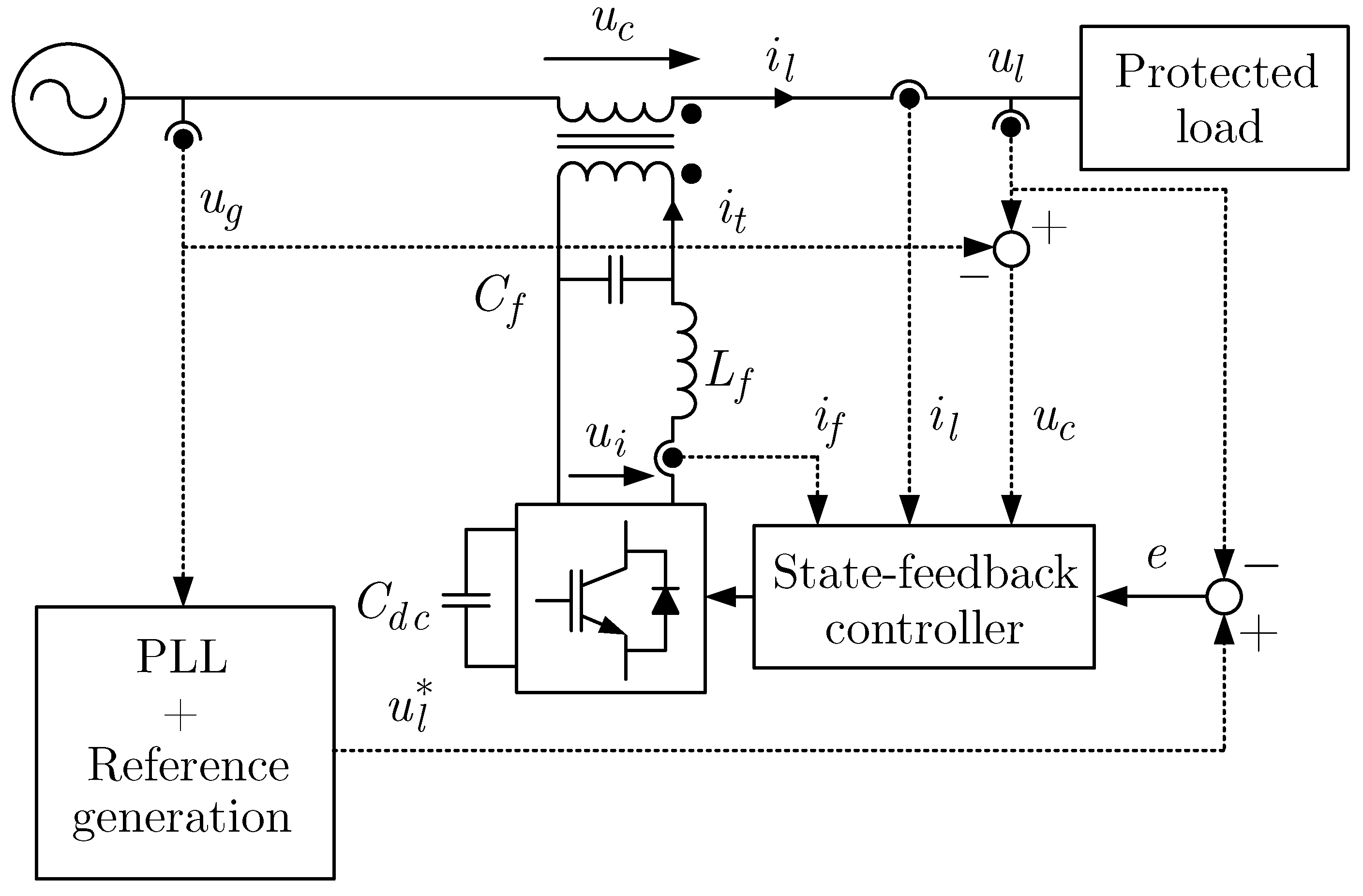
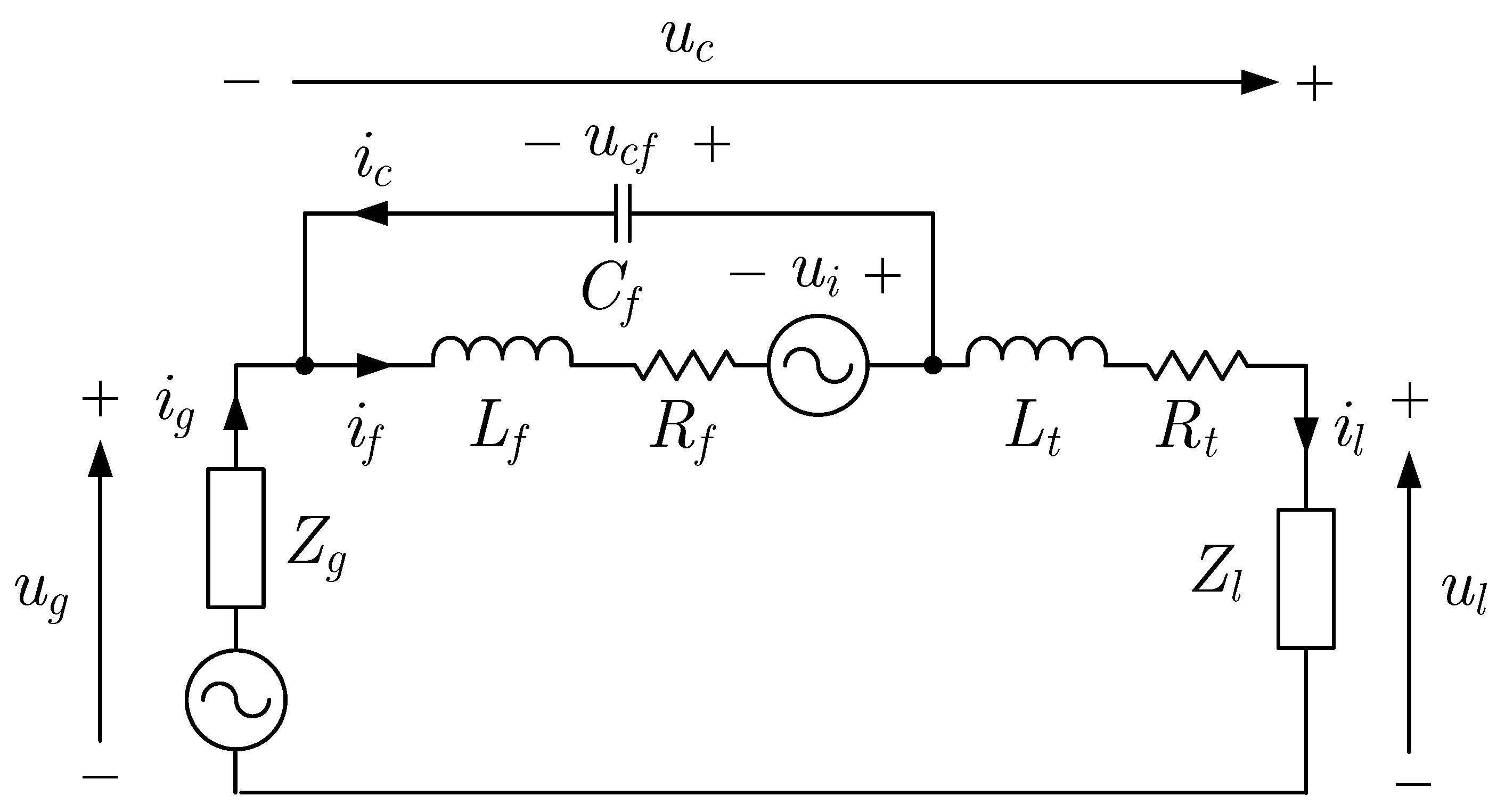
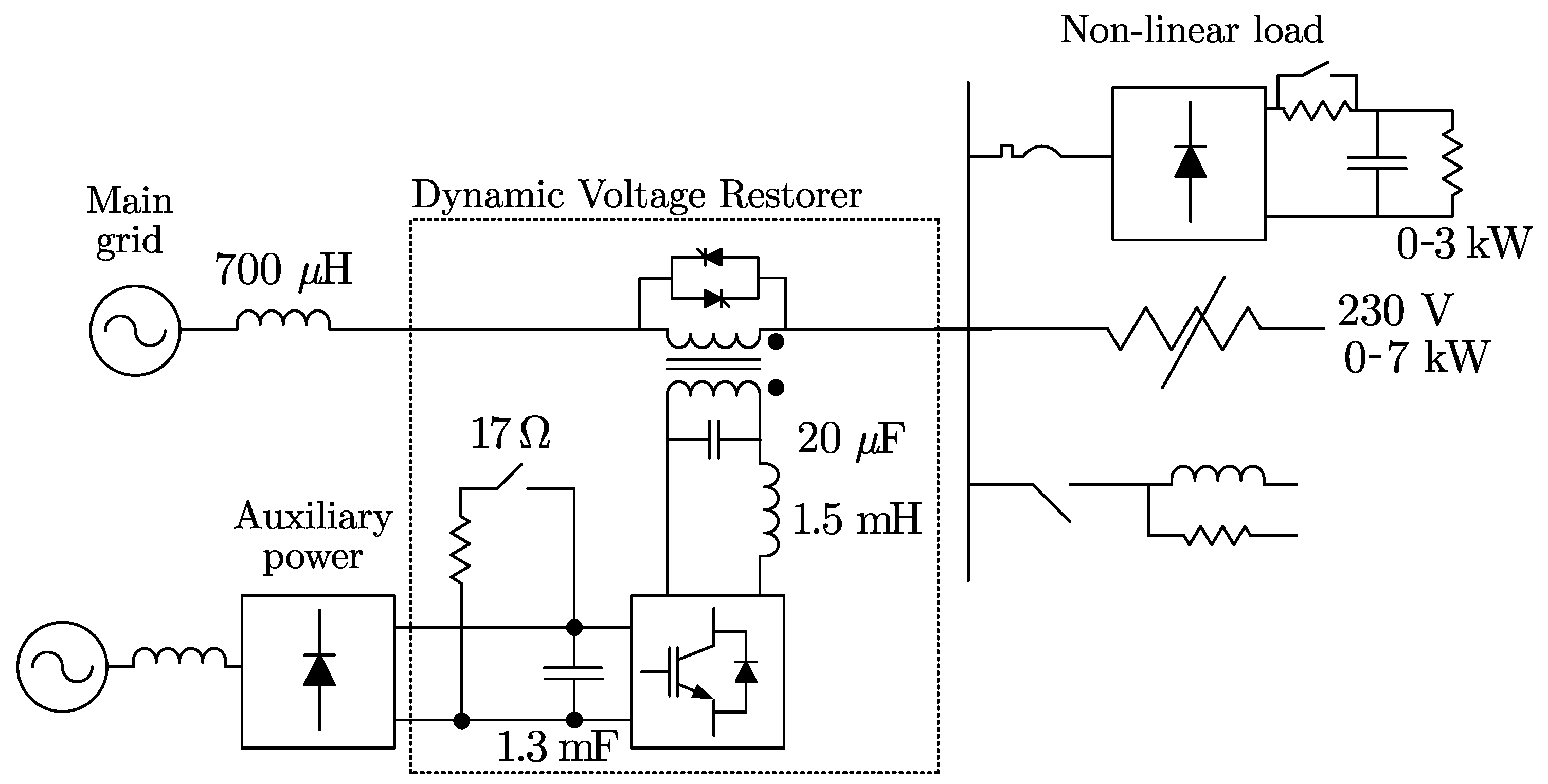
2.1. DVR Overview
2.2. Per-Unit Model
- The peak value of nominal three-phase (sinusoidal) signals is after dividing them by their base value. Therefore, for the rest of the paper, three-phase waveforms are drawn multiplied by so that their peak value at nominal conditions is 1 pu.
2.3. Continuous-Time Modeling
2.4. Discrete-Time Model
2.5. Plant Model with Delays
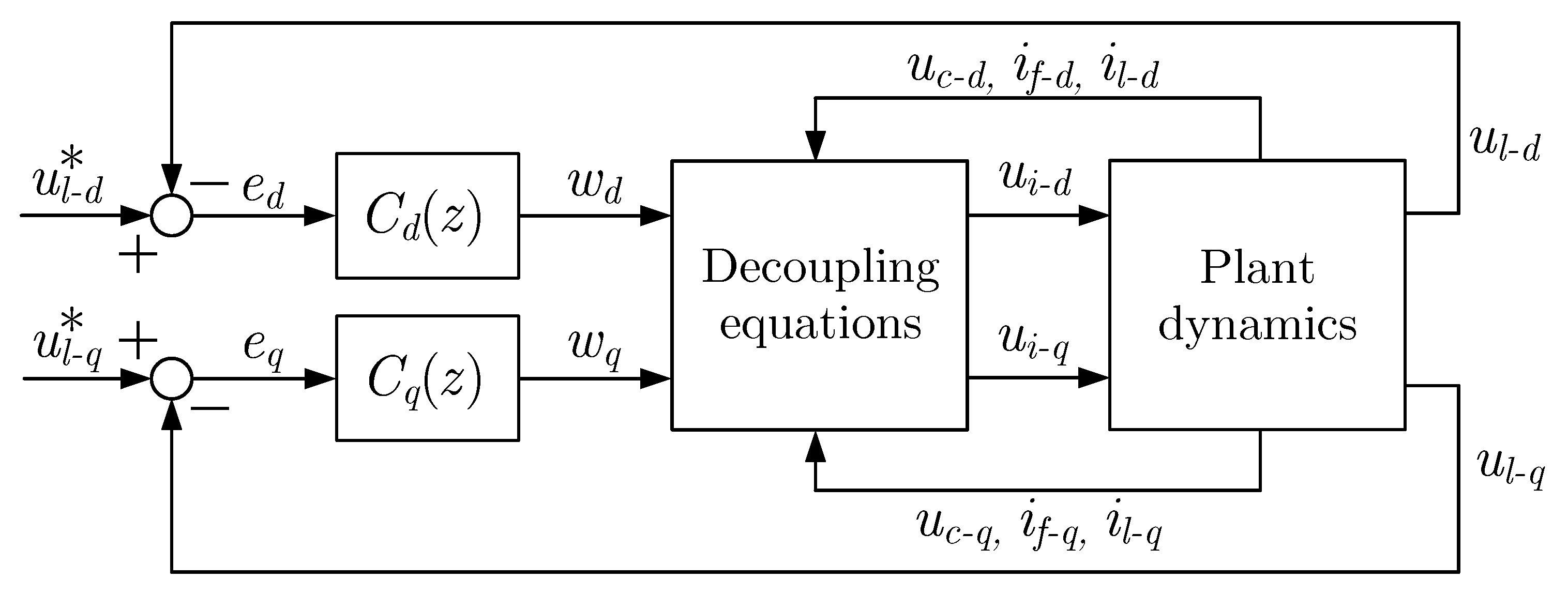
2.6. Control Problem Definition
3. State-Feedback Controller
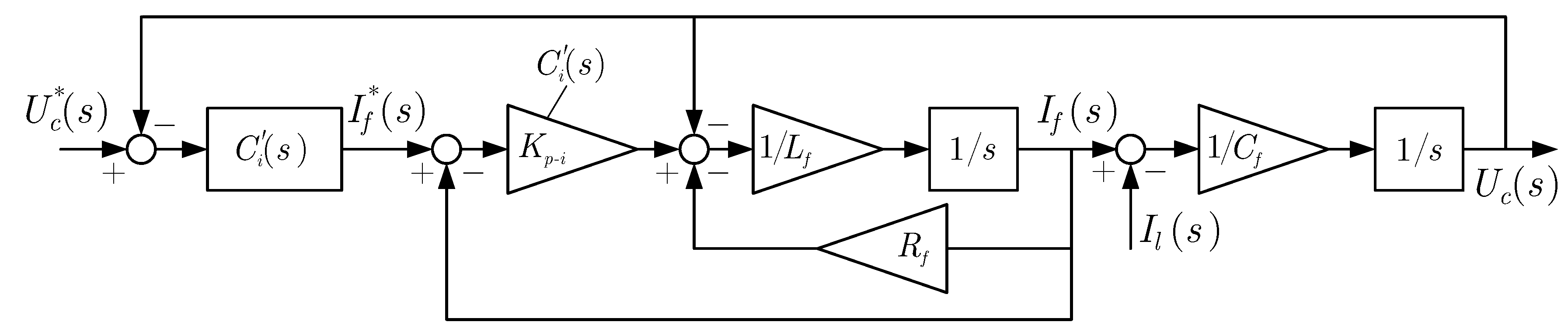
3.1. Integral State-Feedback Controller
3.2. Incremental Controller
4. Prototype Description
5. Application of an SF Controller to a DVR
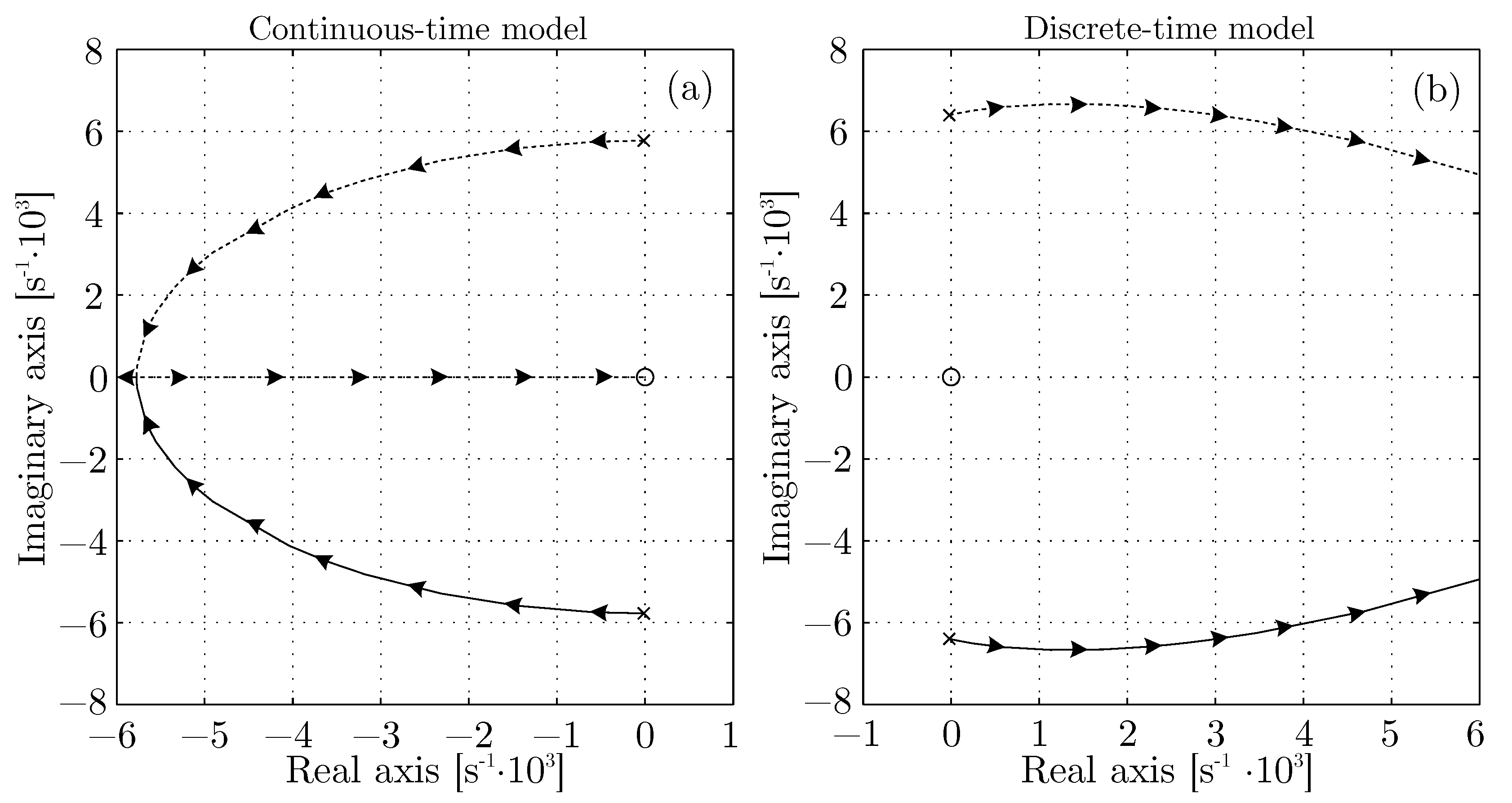
5.1. Closed-Loop Pole Position
5.1.1. Simple Pole-Placement Alternative
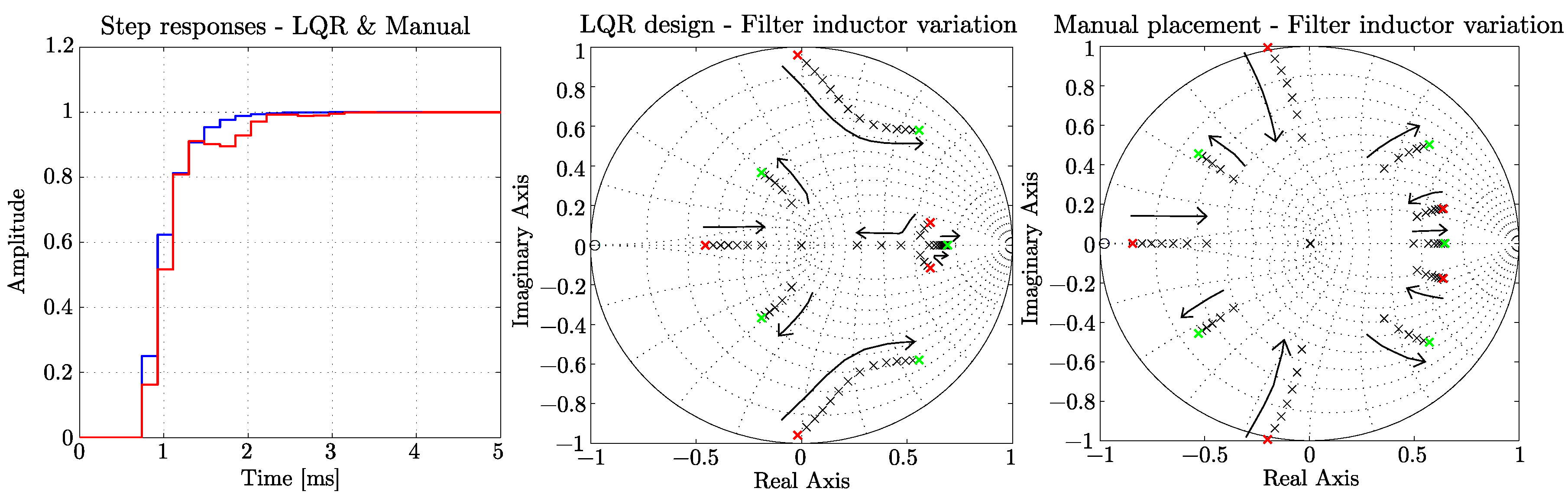
5.1.2. Pole-Placement by Solving the LQR Problem
5.1.3. Comparative Analysis of the Pole-Placement Alternatives
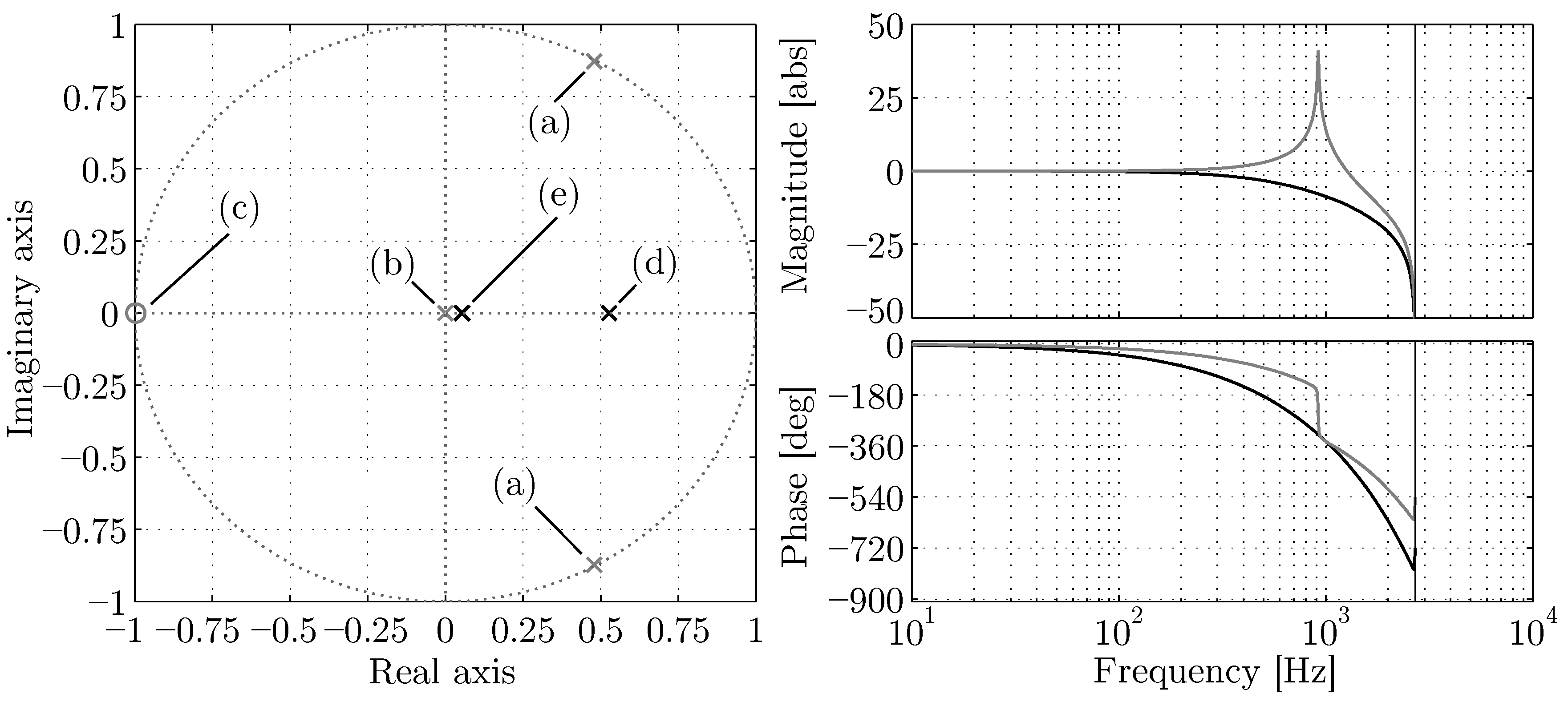
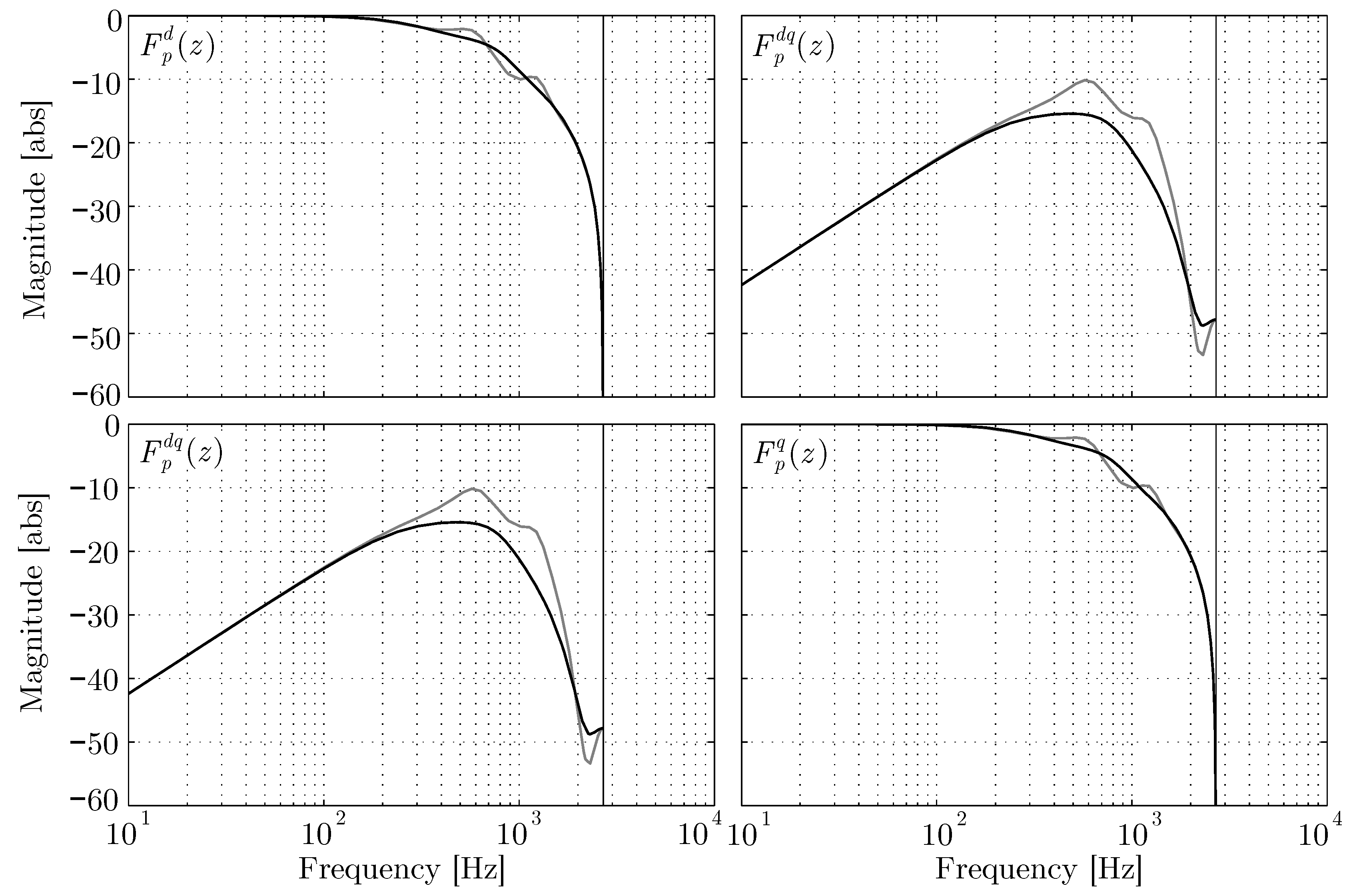
5.2. Closed-Loop System Analysis
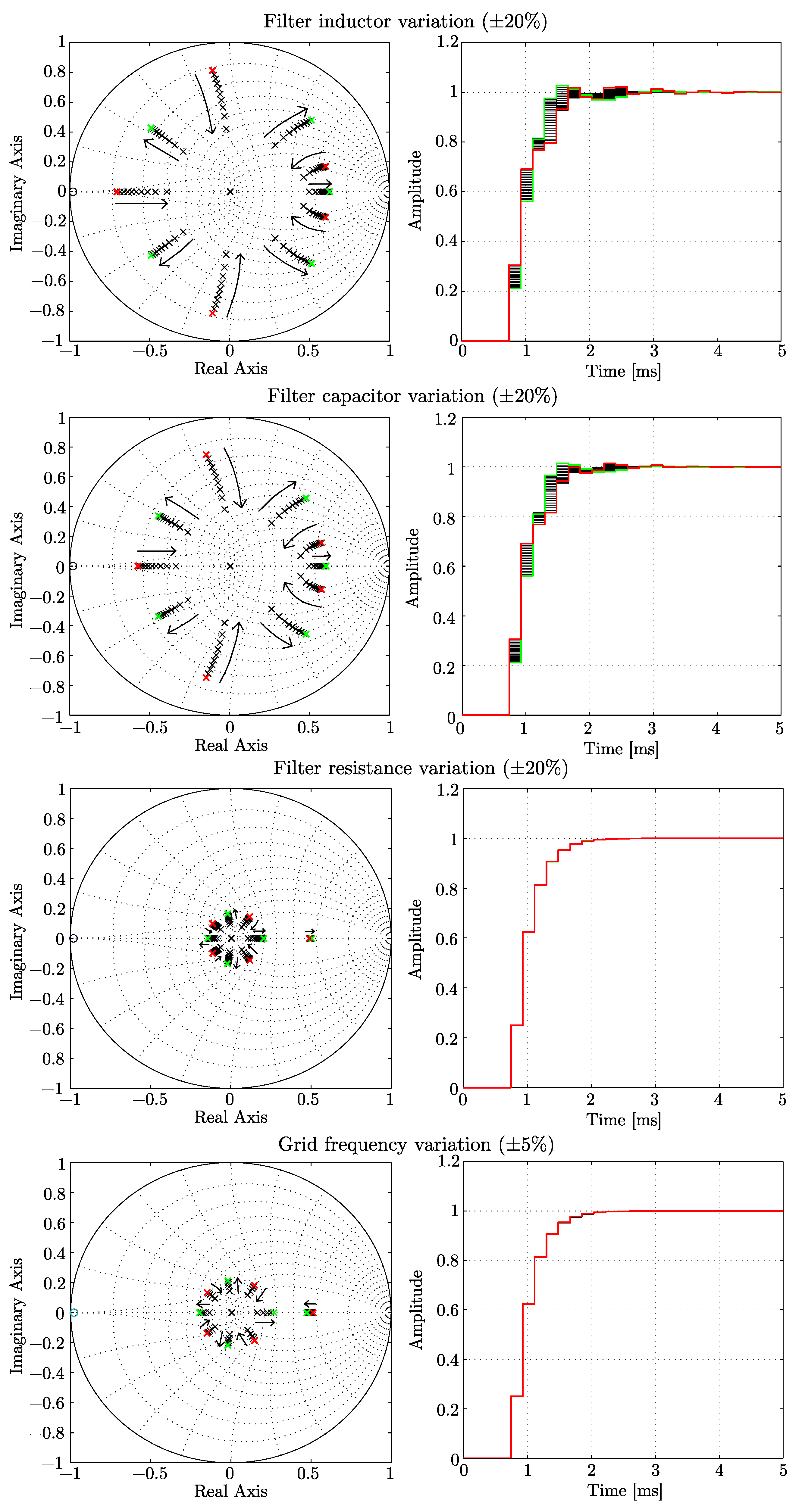
5.3. Robustness Analysis
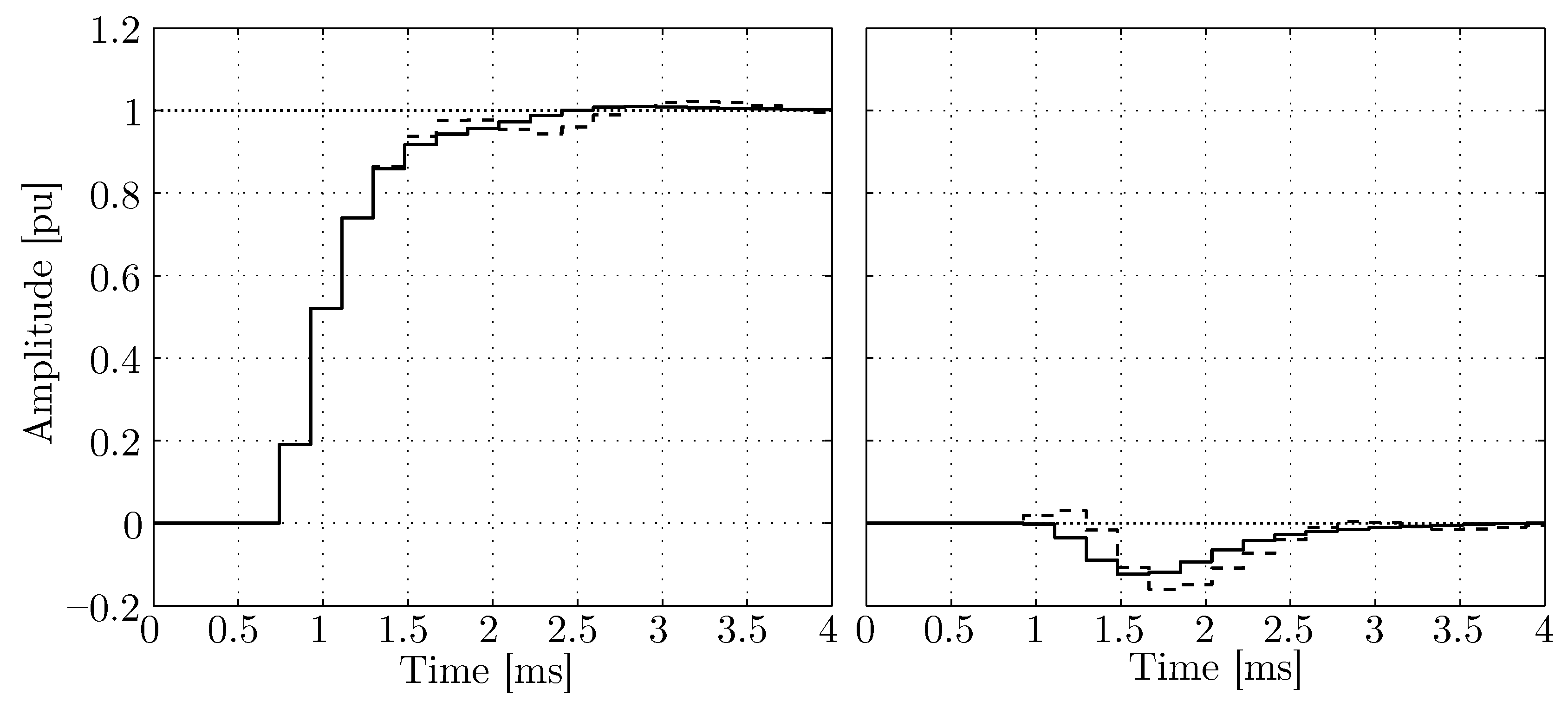
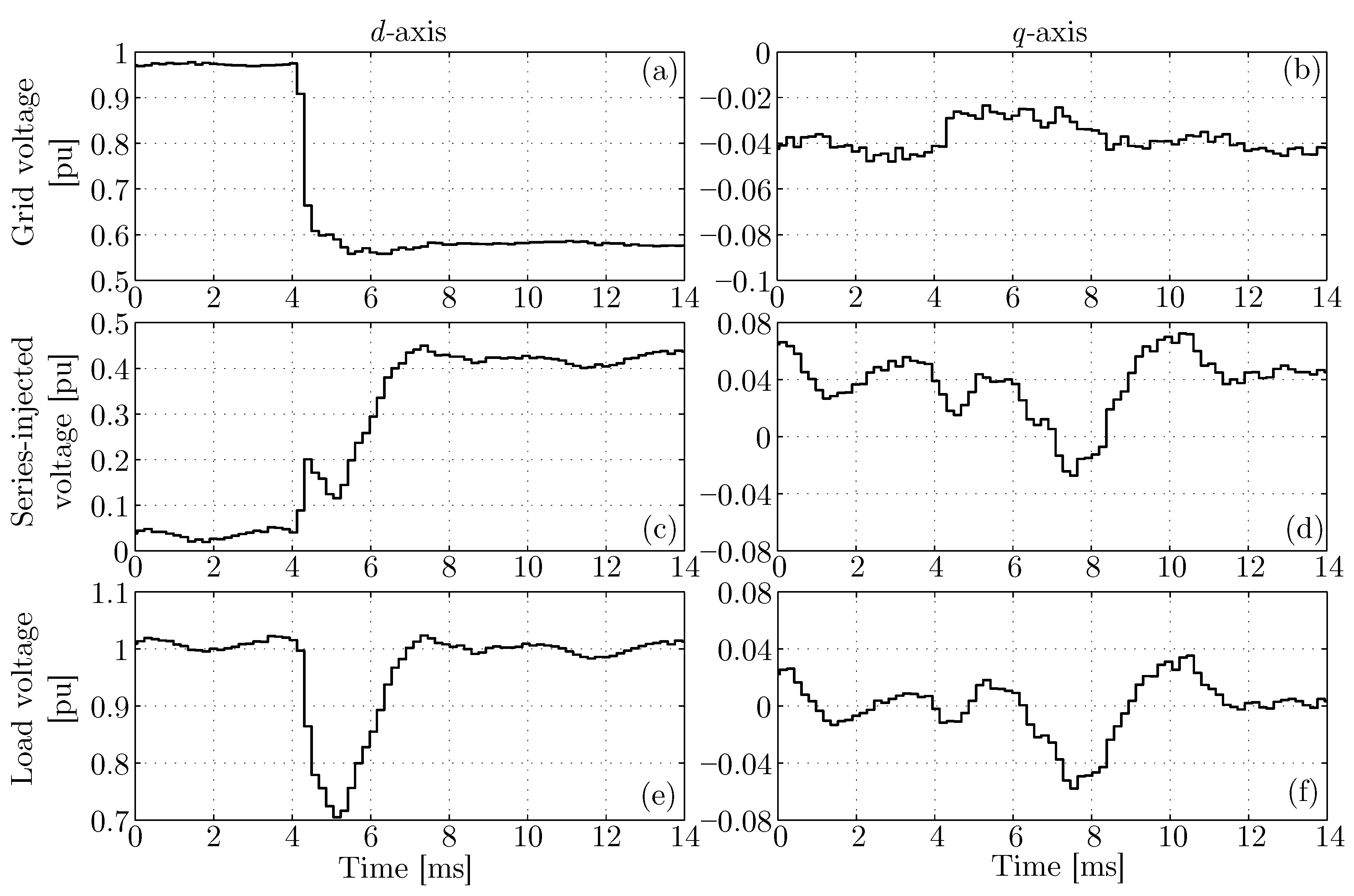
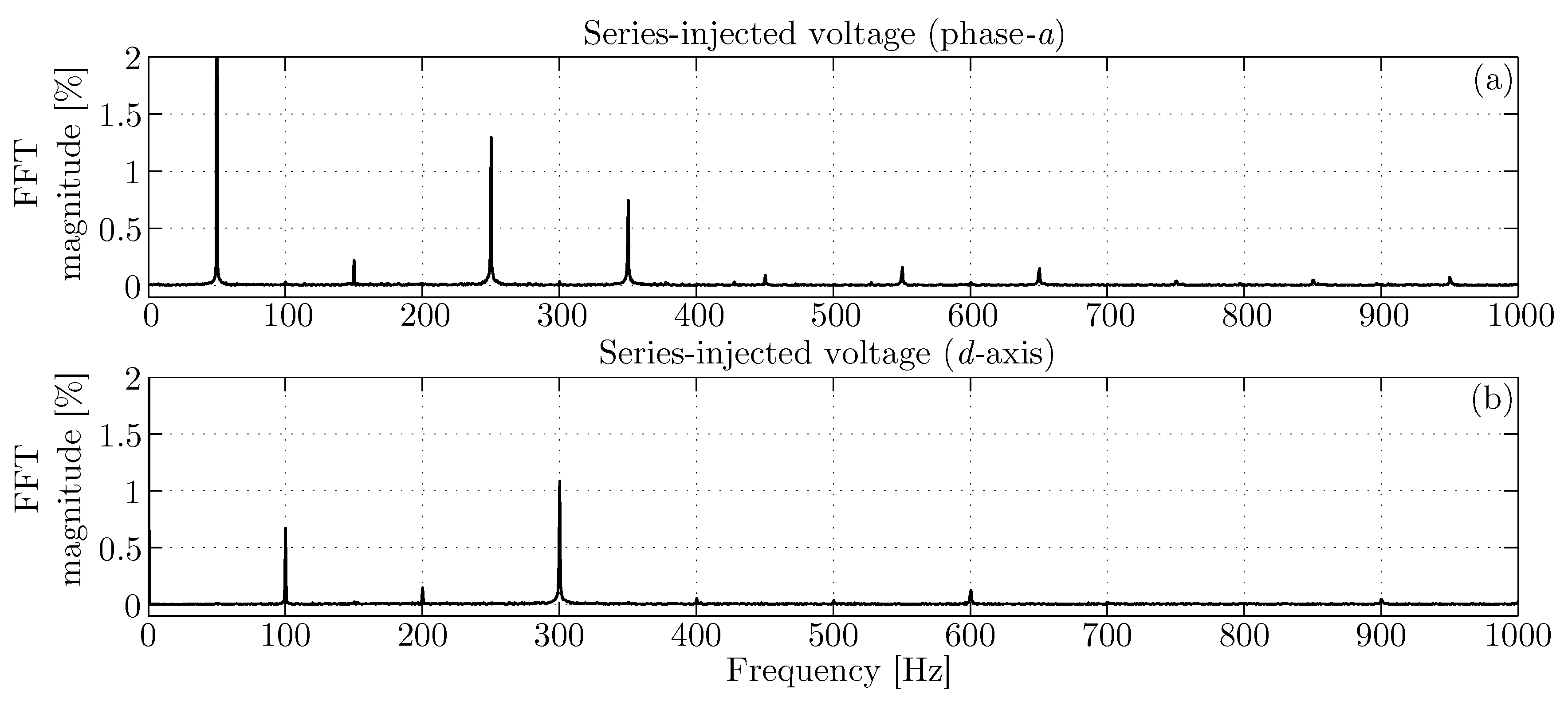
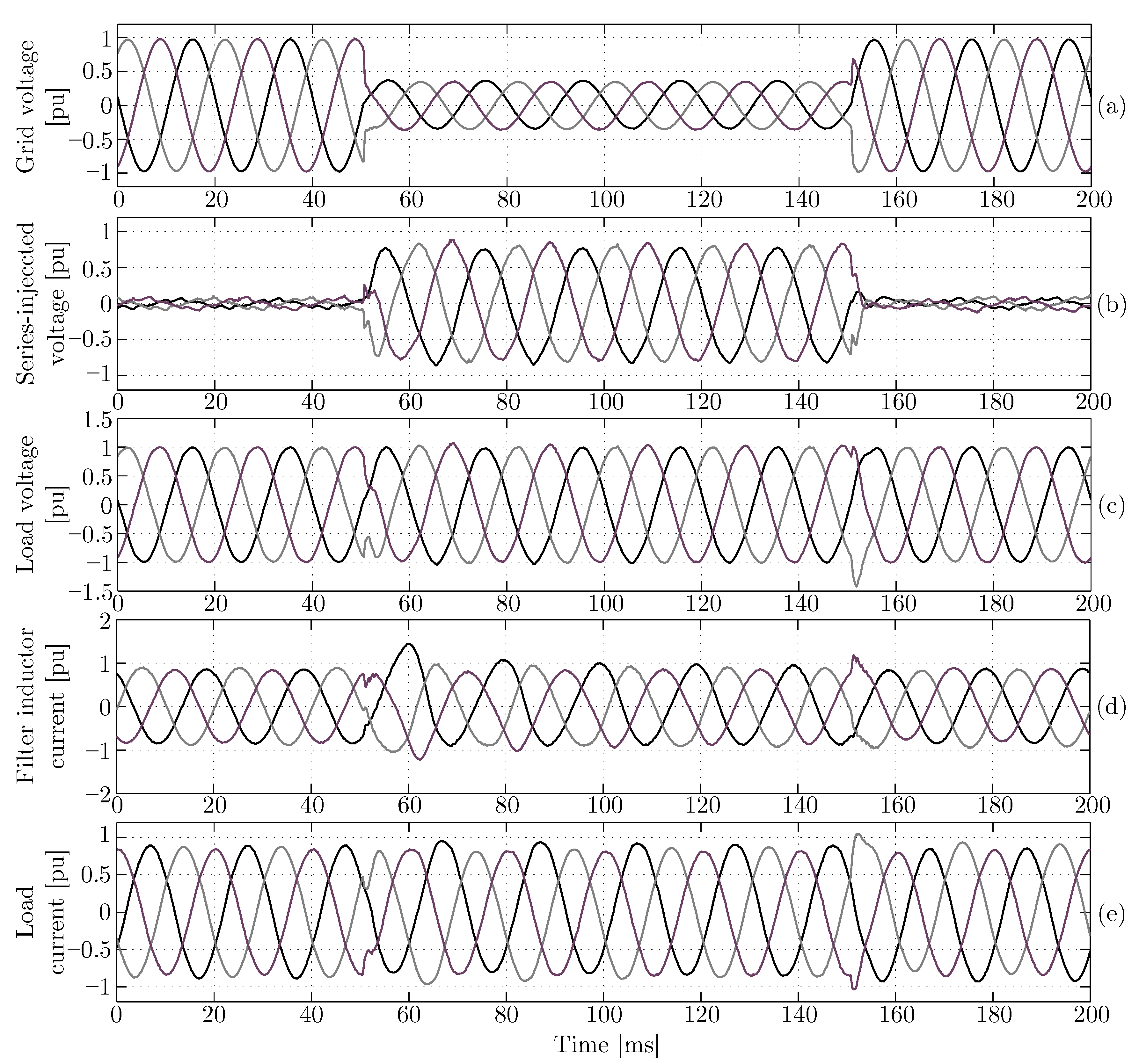
5.4. Performance of the State-Feedback Controller
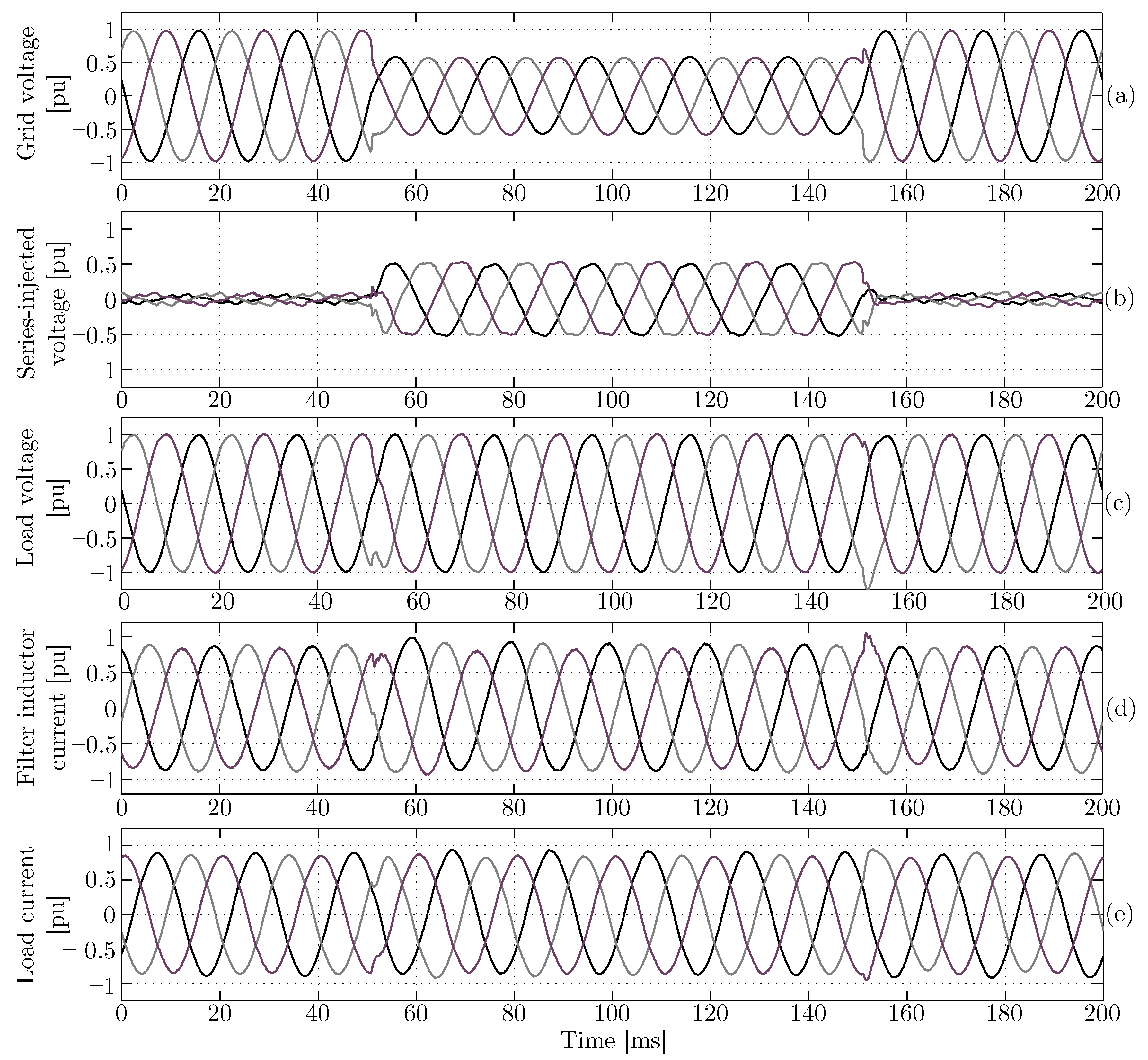
Voltage-Sag Compensation
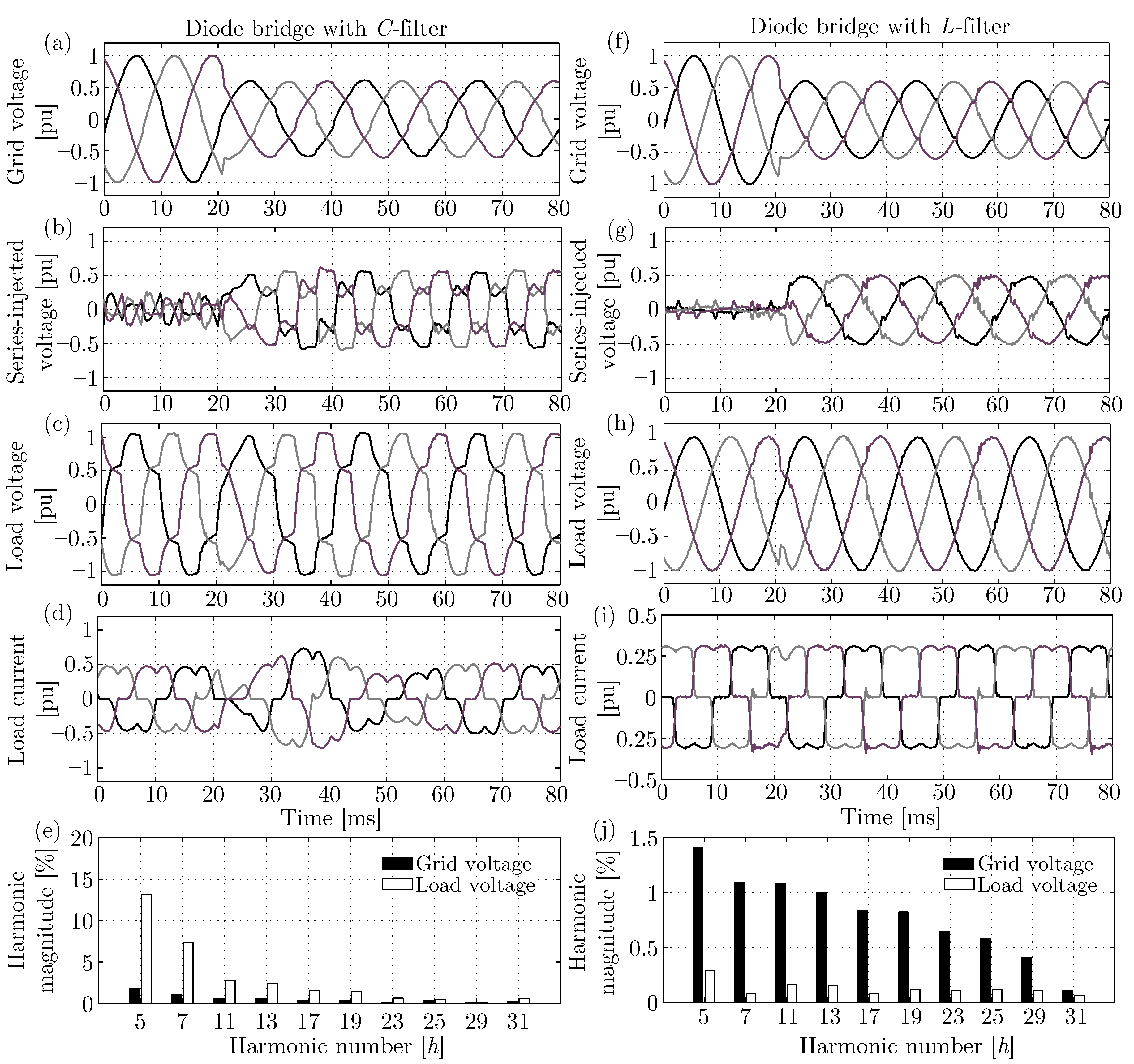
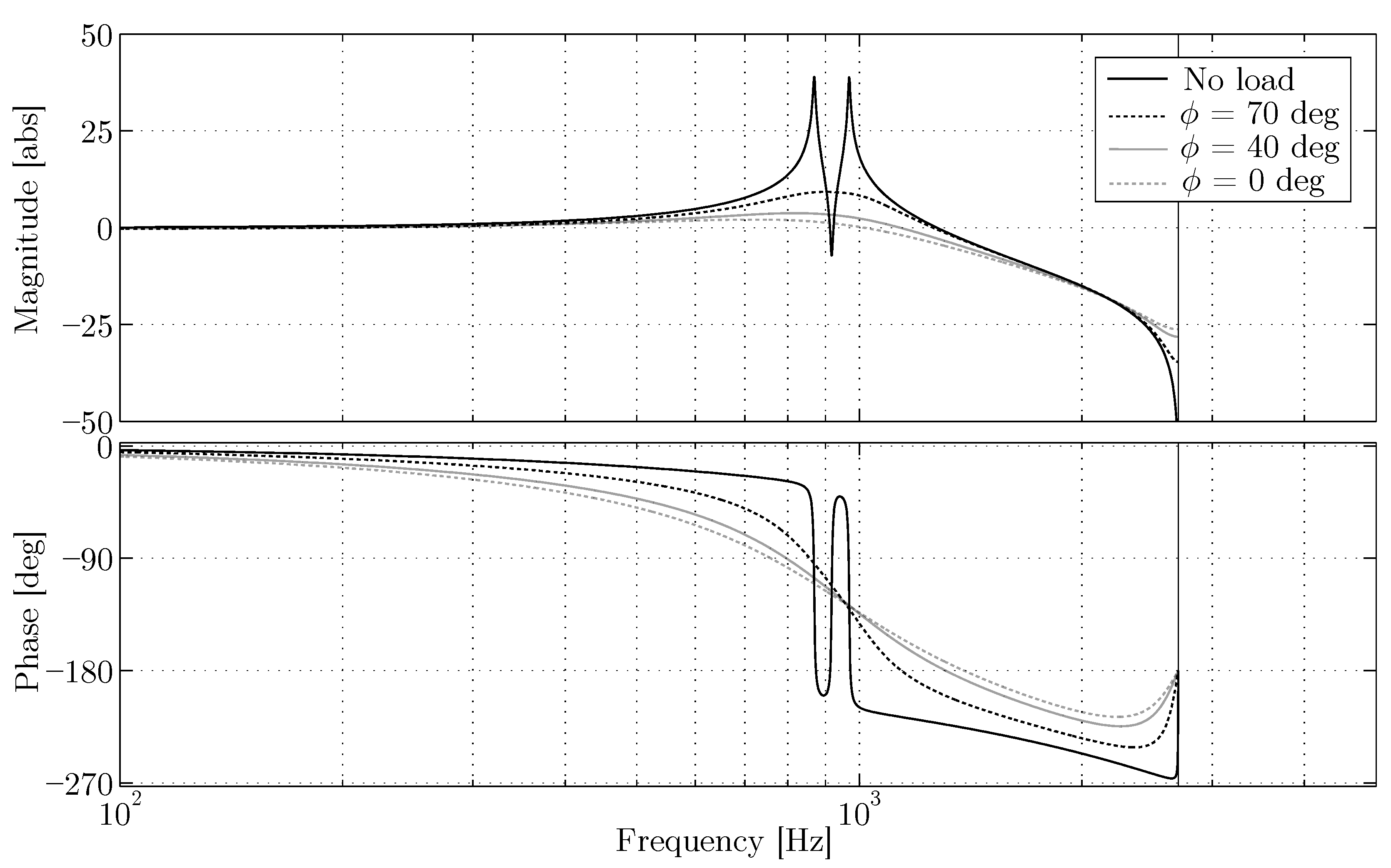
5.5. Influence of the Load
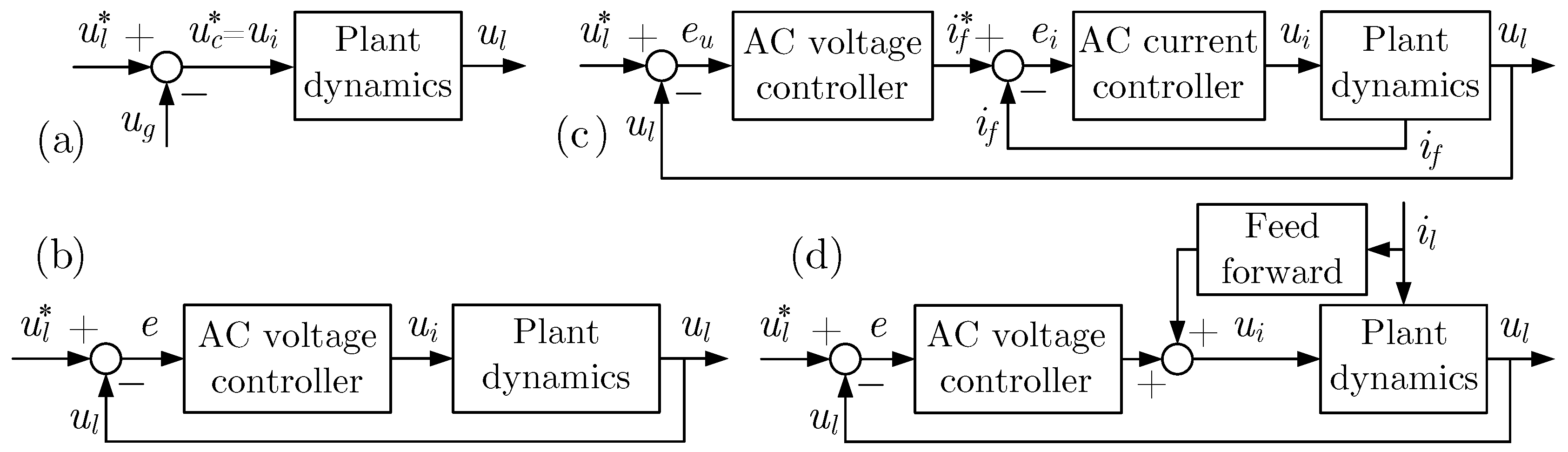
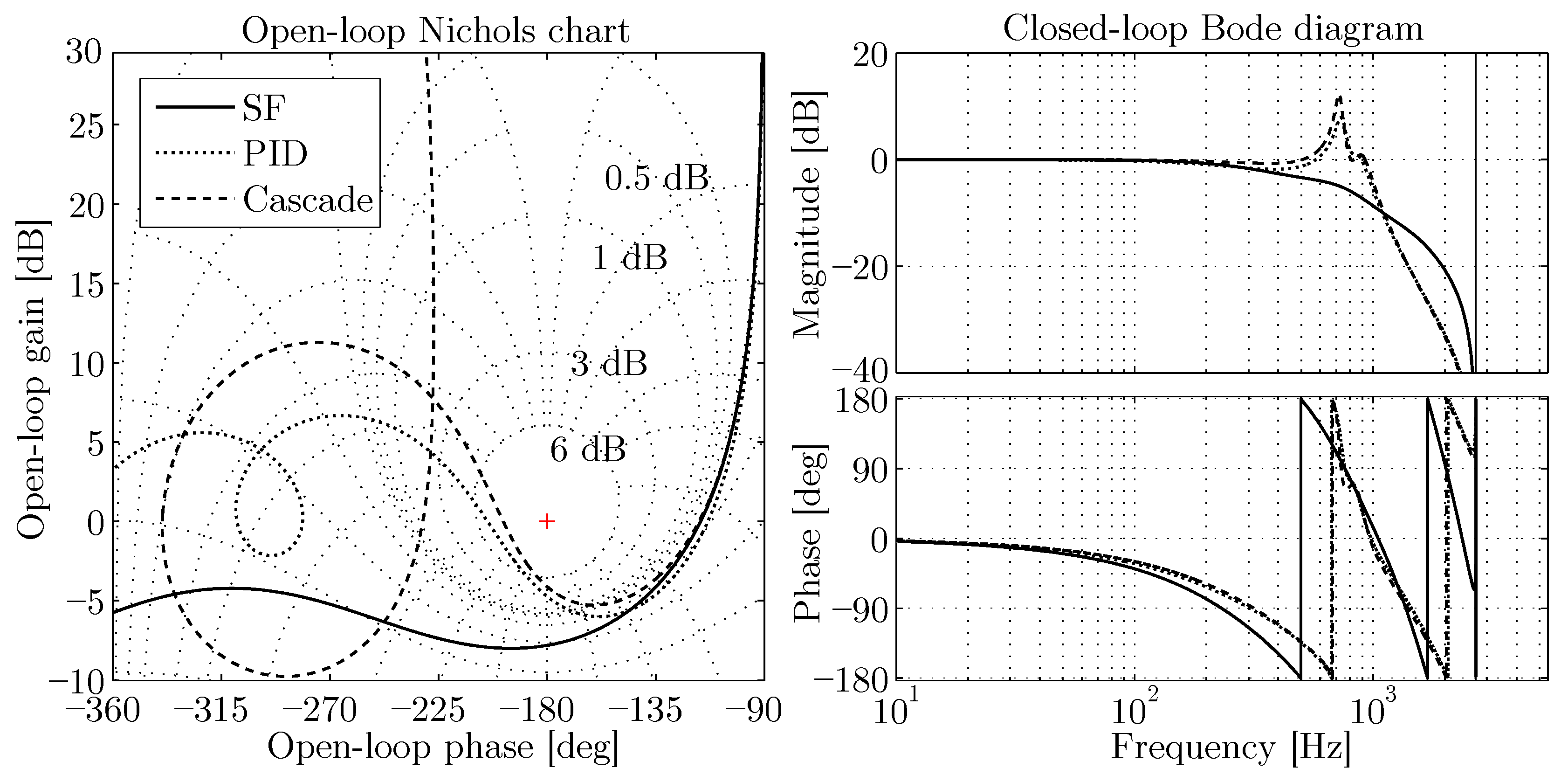
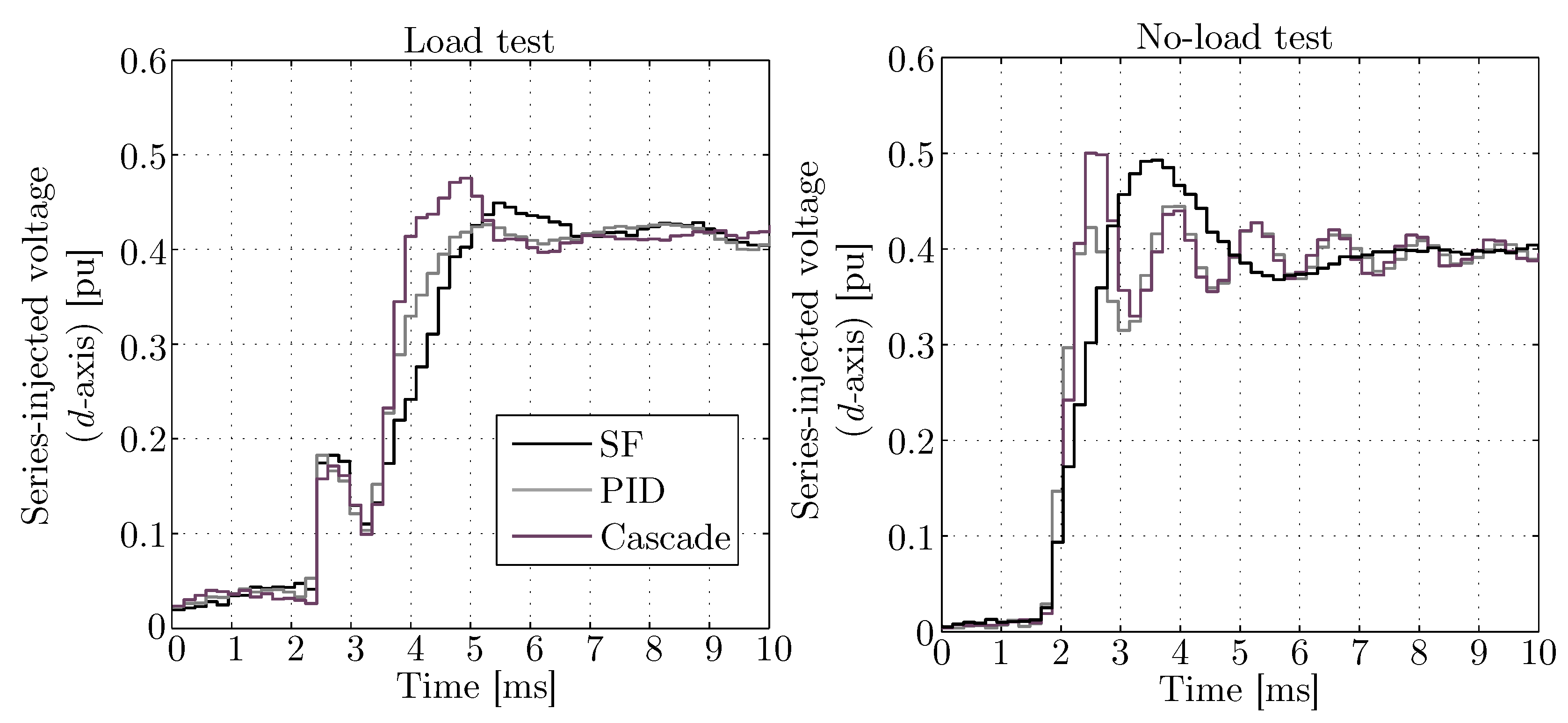
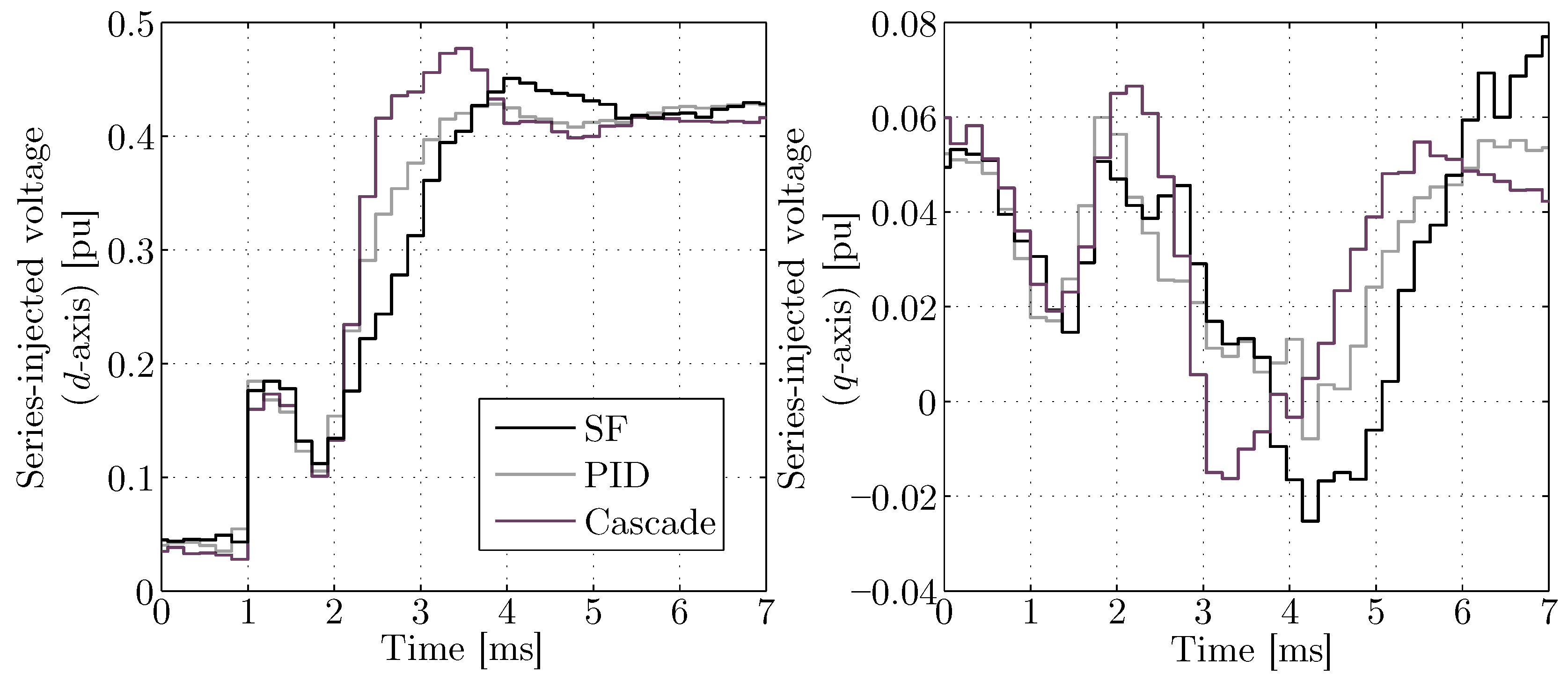
6. Alternatives for the Main Controller
6.1. PID Controller
6.2. Cascade Controller
7. Main Controller Trade-offs
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bollen, M. Voltage sags: Effects, mitigation and prediction. Power Eng. J. 1996, 10, 129–135. [Google Scholar] [CrossRef]
- Carle, R. UPS applications: A mill perspective. IEEE Ind. Appl. Mag. 1995, 1, 12–17. [Google Scholar] [CrossRef]
- Roldán-Pérez, J.; García-Cerrada, A.; Ochoa-Giménez, M.; Zamora-Macho, J.L. On the Power Flow Limits and Control in Series-Connected Custom Power Devices. IEEE Trans. Power Electron. 2016, 31, 7328–7338. [Google Scholar] [CrossRef]
- Gyugyi, L.; Schauder, C.D.; Edwards, C.W.; Sarkozi, M. Apparatus and Method for Dynamic Voltage Restoration of Utility Distribution Networks. U.S. Patent 5,329,222, 12 July 1994. [Google Scholar]
- Antchev, M.; Petkova, M.; Gourgoulitsov, V.; Antchev, H. Investigation of Unified Voltage Conditioner (UVC). J. Power Electron. 2012, 12, 357–367. [Google Scholar] [CrossRef]
- Nielsen, J.G. Design and Control of a Dynamic Voltage Restorer. Ph.D. Thesis, Aalborg University, Aalborg, Denmark, 2002. [Google Scholar]
- Roldán-Pérez, J.; Zamora-Macho, J.L.; Ochoa-Giménez, M.; García-Cerrada, A. A steady-state harmonic controller for a series compensator with uncertain load dynamics. Electric Power Syst. Res. 2017, 150, 152–161. [Google Scholar] [CrossRef]
- Jimichi, T.; Fujita, H.; Akagi, H. An Approach to Eliminating DC Magnetic Flux From the Series Transformer of a Dynamic Voltage Restorer. IEEE Trans. Ind. Appl. 2008, 44, 809–816. [Google Scholar] [CrossRef]
- Li, B.H.; Choi, S.; Vilathgamuwa, D. Design considerations on the line-side filter used in the dynamic voltage restorer. IEE Proc. Gener. Transm. Distrib. 2001, 148, 1–7. [Google Scholar] [CrossRef]
- Choi, S.; Li, B.; Vilathgamuwa, D. Design and analysis of the inverter-side filter used in the dynamic voltage restorer. IEEE Trans. Power Deliv. 2002, 17, 857–864. [Google Scholar] [CrossRef]
- Goharrizi, A.Y.; Hossein, S.H.; Sabahi, M.; Charehpetian, G.B. Three-phase HFL-DVR with independently controlled phases. IEEE Trans. Power Electron. 2012, 27, 1706–1718. [Google Scholar] [CrossRef]
- Roncero-Sánchez, P.; Acha, E. Dynamic Voltage Restorer Based on Flying Capacitor Multilevel Converters Operated by Repetitive Control. IEEE Trans. Power Deliv. 2009, 24, 277–284. [Google Scholar] [CrossRef]
- Kim, H.; Sul, S.K. Compensation Voltage Control in Dynamic Voltage Restorers by Use of Feed Forward and State Feedback Scheme. IEEE Trans. Power Electron. 2005, 20, 1169–1177. [Google Scholar] [CrossRef]
- Ho, C.; Chung, H.; Au, K. Design and Implementation of a Fast Dynamic Control Scheme for Capacitor-Supported Dynamic Voltage Restorers. IEEE Trans. Power Electron. 2008, 23, 237–251. [Google Scholar] [CrossRef]
- Li, Y.W. Control and Resonance Damping of Voltage-Source and Current-Source Converters With Filters. IEEE Trans. Ind. Electron. 2009, 56, 1511–1521. [Google Scholar]
- Kanjiya, P.; Singh, B.; Chandra, A.; Al-Haddad, K. SRF theory revisited to Control Self-Supported Dynamic Voltage Restorer (DVR) for Unbalanced and Nonlinear Loads. IEEE Trans. Ind. Appl. 2013, 49, 2330–2340. [Google Scholar] [CrossRef]
- Li, Y.W.; Blaabjerg, F.; Vilathgamuwa, D.; Loh, P.C. Design and Comparison of High Performance Stationary-Frame Controllers for DVR Implementation. IEEE Trans. Power Electron. 2007, 22, 602–612. [Google Scholar] [CrossRef]
- Yazdani, A.; Iravani, R. Voltage-Sourced Converters in Power Systems; Wiley: Hooken, NJ, USA, 2010. [Google Scholar]
- Badrkhani Ajaei, F.; Afsharnia, S.; Kahrobaeian, A.; Farhangi, S. A Fast and Effective Control Scheme for the Dynamic Voltage Restorer. IEEE Trans. Power Deliv. 2011, 26, 2398–2406. [Google Scholar] [CrossRef]
- Roncero-Sánchez, P.; Acha, E.; Ortega-Calderón, J.; Feliu-Batlle, V.; García-Cerrada, A. Repetitive control for a dynamic voltage restorer for power-quality improvement. In Proceedings of the 13th European Conference on Power Electronics and Applications (EPE ’09), Barcelona, Spain, 8–10 September 2009; pp. 1–10. [Google Scholar]
- Hung, J. Feedback control with Posicast. IEEE Trans. Ind. Electron. 2003, 50, 94–99. [Google Scholar] [CrossRef]
- Mahdianpoor, F.; Hooshmand, R.; Ataei, M. A New Approach to Multifunctional Dynamic Voltage Restorer Implementation for Emergency Control in Distribution Systems. IEEE Trans. Power Deliv. 2011, 26, 882–890. [Google Scholar] [CrossRef]
- Petkova, M.; Antchev, M.; Gourgoulitsov, V. Investigation of single-phase inverter and single phase series active power filter with sliding mode control. Intech 2011. Available online: https://www.intechopen.com/books/sliding-mode-control/investigation-of-single-phase-inverter-and-single-phase-series-active-power-filter-with-sliding-mode (accessed on 1 June 2018). [CrossRef]
- Antchev, M.; Petkova, M.; Gurgulitsov, V. Sliding mode control of a single phase series active power filter. In Proceedings of the IEEE Conference EUROCON, Warsaw, Poland, 9–12 September 2007; pp. 1344–1349. [Google Scholar]
- Antchev, M.; Petkova, M.; Antchev, H.; Gourgoulitsov, V.; Valtchev, S. Study of Single-Phase Series Active Power Filter with Hysteresis Control. J. Energy Power Eng. 2012, 10, 1634–1641. [Google Scholar]
- Sasitharan, S.; Mishra, M. Constant switching frequency band controller for dynamic voltage restorer. IET Power Electron. 2010, 3, 657–667. [Google Scholar] [CrossRef]
- Jowder, F. Design and analysis of dynamic voltage restorer for deep voltage sag and harmonic compensation. IET Gener. Transm. Distrib. 2009, 3, 547–560. [Google Scholar] [CrossRef]
- Teke, A.; Bayindir, K.; Tumay, M. Fast sag/swell detection method for fuzzy logic controlled dynamic voltage restorer. IET Gener. Transm. Distrib. 2010, 4, 1–12. [Google Scholar] [CrossRef]
- Jurado, F. Neural network control for dynamic voltage restorer. IEEE Trans. Ind. Electron. 2004, 51, 727–729. [Google Scholar] [CrossRef]
- Elnady, A.; Salama, M. Mitigation of voltage disturbances using adaptive perceptron-based control algorithm. IEEE Trans. Power Deliv. 2005, 20, 309–318. [Google Scholar] [CrossRef]
- Saleh, S.; Moloney, C.; Azizur Rahman, M. Implementation of a Dynamic Voltage Restorer System Based on Discrete Wavelet Transforms. IEEE Trans. Power Deliv. 2008, 23, 2366–2375. [Google Scholar] [CrossRef]
- Loh, P.C.; Holmes, D.G. Analysis of multiloop control strategies for LC/CL/LCL-filtered voltage-source and current-source inverters. IEEE Trans. Ind. Appl. 2005, 41, 644–654. [Google Scholar] [CrossRef]
- Blasko, V.; Kaura, V. A novel control to actively damp resonance in input LC filter of a three-phase voltage source converter. IEEE Trans. Ind. Appl. 1997, 33, 542–550. [Google Scholar] [CrossRef]
- Cheng, P.T.; Chen, J.M.; Ni, C.L. Design of a State-Feedback Controller for Series Voltage-Sag Compensators. IEEE Trans. Ind. Appl. 2009, 45, 260–267. [Google Scholar] [CrossRef]
- Hasanzadeh, A.; Edrington, C.; Maghsoudlou, B.; Fleming, F.; Mokhtari, H. Multi-loop linear resonant voltage source inverter controller design for distorted loads using the linear quadratic regulator method. IET Power Electron. 2012, 5, 841–851. [Google Scholar] [CrossRef]
- Huerta, F.; Pizarro, D.; Cobreces, S.; Rodriguez, F.J.; Giron, C.; Rodriguez, A. LQG Servo Controller for the Current Control of LCL Grid-Connected Voltage-Source Converters. IEEE Trans. Ind. Electron. 2012, 59, 4272–4284. [Google Scholar] [CrossRef]
- Ochoa-Giménez, M.; García-Cerrada, A.; Zamora-Macho, J.L. Comprehensive control for unified power quality conditioners. J. Mod. Power Syst. Clean Energy 2017, 5, 609–619. [Google Scholar] [CrossRef] [Green Version]
- Roldán-Pérez, J.; García-Cerrada, A.; Zamora-Macho, J.L.; Roncero-Sánchez, P.; Acha, E. Troubleshooting a digital repetitive controller for a versatile dynamic voltage restorer. Int. J. Electr. Power Energy Syst. 2014, 57, 105–115. [Google Scholar] [CrossRef]
- Krause, P.C.; Wasynczuk, O.; Sudhoff, S.D. Analysis of Electric Machinery and Drive Systems, 2nd ed.; Wiley-IEEE Press: Piscataway, NJ, USA, 2002. [Google Scholar]
- Pinzón-Ardila, O. Selective Harmonic Compensation by Using Active Power Filters. Ph.D. Thesis, Comillas Pontifical University, Madrid, Spain, 2007. [Google Scholar]
- García-González, P. Modelling, Control and Application of “FACTS” based on Voltage Source Converters (VSCs). Ph.D. Thesis, Universidad Pontificia Comillas, Madrid, Spain, 2009. [Google Scholar]
- Åström, K.J.; Wittenmark, B. Computer Controlled Systems; Prentice-Hall: Upper Saddle River, NJ, USA, 1984. [Google Scholar]
- García-Cerrada, A.; Pinzón-Ardila, O.; Feliu-Batlle, V.; Roncero-Sánchez, P.; García-González, P. Application of a Repetitive Controller for a Three-Phase Active Power Filter. IEEE Trans. Power Electron. 2007, 22, 237–246. [Google Scholar] [CrossRef]
- García-González, P.; García-Cerrada, A. Control system for a PWM-based STATCOM. IEEE Trans. Power Deliv. 2000, 15, 1252–1257. [Google Scholar] [CrossRef]
- Roldán-Pérez, J.; García-Cerrada, A.; Zamora-Macho, J.L.; Roncero-Sánchez, P.; Acha, E. Adaptive repetitive controller for a three-phase dynamic voltage restorer. In Proceedings of the 3rd IEEE International Conference on Power Engineering, Energy and Electrical Drives, Malaga, Spain, 11–13 May 2011. [Google Scholar]
- Kuo, B. Automatic Control System; Prentice-Hall International London: London, UK, 1962. [Google Scholar]
- Astrom, K.J.; Hagglund, T. PID Controllers: Theory, Design, and Tuning, 2nd ed.; International Society for Measurement and Con: Research Triangle Park, NC, USA, 1995. [Google Scholar]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control: Analysis and Design; John Wiley & Sons: Chichester, UK, 2005. [Google Scholar]
- Rodríguez-Cabero, A.; Sánchez, F.H.; Prodanovic, M. A unified control of back-to-back converter. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Kuo, B. Digital Control Systems; Oxford University Press: New York, NY, USA, 1992. [Google Scholar]
- Friedland, B. Control System Design: An Introduction to State-Space Methods; McGraw-Hill Series in Electrical Engineering: Control Theory; McGraw-Hill: London, UK, 1986. [Google Scholar]
- Vilathgamuwa, M.; Perera, A.; Choi, S. Performance improvement of the dynamic voltage restorer with closed-loop load voltage and current-mode control. IEEE Trans. Power Electron. 2002, 17, 824–834. [Google Scholar] [CrossRef]
- Wang, B.; Venkataramanan, G.; Illindala, M. Operation and control of a dynamic voltage restorer using transformer coupled H-bridge converters. IEEE Trans. Power Electron. 2006, 21, 1053–1061. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Name | Base Name | VSC Side | Grid Side |
|---|---|---|---|
| Apparent power (VA) | |||
| Phase voltage (V) | |||
| Current (A) | |||
| Impedance () | |||
| Frequency (rad/s) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roldán-Pérez, J.; García-Cerrada, A.; Rodríguez-Cabero, A.; Zamora-Macho, J.L. Comprehensive Design and Analysis of a State-Feedback Controller for a Dynamic Voltage Restorer. Energies 2018, 11, 1972. https://doi.org/10.3390/en11081972
Roldán-Pérez J, García-Cerrada A, Rodríguez-Cabero A, Zamora-Macho JL. Comprehensive Design and Analysis of a State-Feedback Controller for a Dynamic Voltage Restorer. Energies. 2018; 11(8):1972. https://doi.org/10.3390/en11081972
Chicago/Turabian StyleRoldán-Pérez, Javier, Aurelio García-Cerrada, Alberto Rodríguez-Cabero, and Juan Luis Zamora-Macho. 2018. "Comprehensive Design and Analysis of a State-Feedback Controller for a Dynamic Voltage Restorer" Energies 11, no. 8: 1972. https://doi.org/10.3390/en11081972
APA StyleRoldán-Pérez, J., García-Cerrada, A., Rodríguez-Cabero, A., & Zamora-Macho, J. L. (2018). Comprehensive Design and Analysis of a State-Feedback Controller for a Dynamic Voltage Restorer. Energies, 11(8), 1972. https://doi.org/10.3390/en11081972