1. Introduction
A partially shaded or malfunctioning PV module(s) in an array leads to multiple peaks on the corresponding P-V characteristic curve, and gives rise to a considerable output power drop [
1,
2]. In light of this, global maximum power point tracking algorithms [
3,
4,
5] are proposed to resolve such multiple peak problems and as a way to reduce the shadow or malfunction impact on the overall system performance. Since a PV module array is operated in a fixed configuration, the above-stated algorithms lead to limited improvement in the electricity generation efficiency, particularly under serious shaded or malfunctioning conditions.
Some differential power processing (DPP) converters and voltage equalizers that are one of the most viable solutions to partial shading are mentioned in [
6,
7,
8]. A distributed algorithm for controlling differential power processing (DPP) converters in photovoltaic (PV) application was presented in [
6]. It tackled the problem of maximizing the power extracted from a system of series-connected PV modules outfitted with DPPs. However, this method must use the numbers of inductor and capacitor, will increase the cost of the system and reduce the stability of the system. Reference [
7] proposed a photovoltaic module architecture with parallel-connected sub-module integrated dc-dc converters that improve efficiency of energy capture in the presence of partial shading or other mismatch conditions. But this architecture needs to connect a dc-dc converter in each series of PV module array that will increase the cost of the PV system. At the same time, the loss of converters will increase. A two-switch voltage equalizer using an LLC resonant inverter with a voltage multiplier has been proposed in [
8]. With this proposed voltage equalizer, local maximum power points successfully disappeared and extractable maximum power significantly increased compared with those without equalization. However, this method needs to couple with the LLC resonant inverter and additional voltage multiplier for PV modules connected in series. And this method cannot be applied in the series-parallel PV modules architecture.
As suggested in [
9], an adaptive PV module array mainly involves two parts, namely a fixed part and an adaptive bank. In any shaded or malfunctioning event in the fixed part, the PV modules in the adaptive bank are interconnected to the fixed part as an effective way to reduce the negative impact of shadow on the overall power system performance. Yet, the price paid is that this approach requires a large number of voltage/current sensors and switches for the interconnection between the fixed part and the adaptive bank. Particularly, for a high capacity power generation system, there must be a tremendous amount of backup PV modules deployed in the adaptive bank, that is, a rise in cost to business concerns. As presented in [
10], a single maximum power point tracker (MPPT) in a PV module array is replaced with multiple MPPTs so as to reduce the impact of shaded or malfunctioning modules. In this manner, the power generation efficiency of the overall system can elevated as intended, while this MPP tracking strategy requires a greater number of DC-DC converters, a high-cost investment in facilities, than a single MPP tracker. In contrast, a shaded PV module(s) is excluded in the normal operation of a PV module array by manipulation of switches [
11] for a maintained level of output power, but it necessitates a complex module configuration.
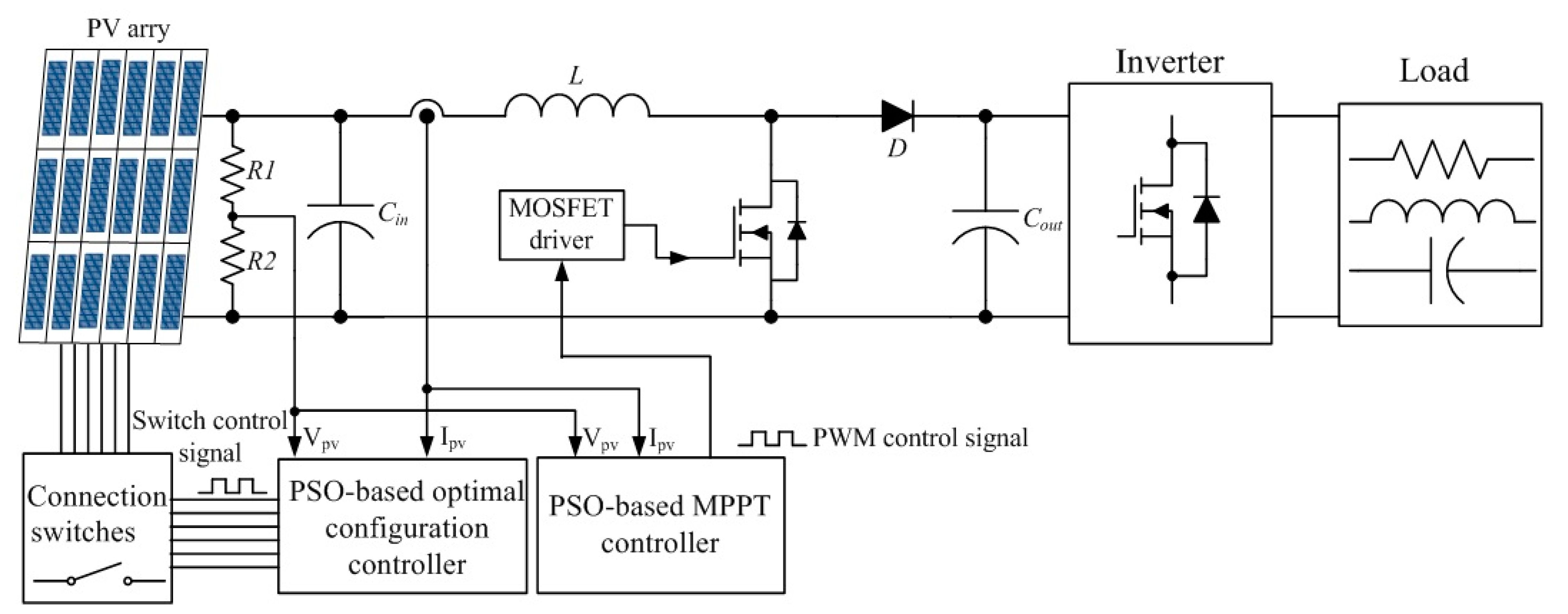
In light of this, a novel and smart configuration strategy is presented for a PV module array in this work. It merely requires a single MPP tracker, and a smaller number of switches than previous studies. All the switches here are manipulated in such a way that the PV module array is operated at the global MPP in any partially shaded and/or malfunctioning event.
In this paper,
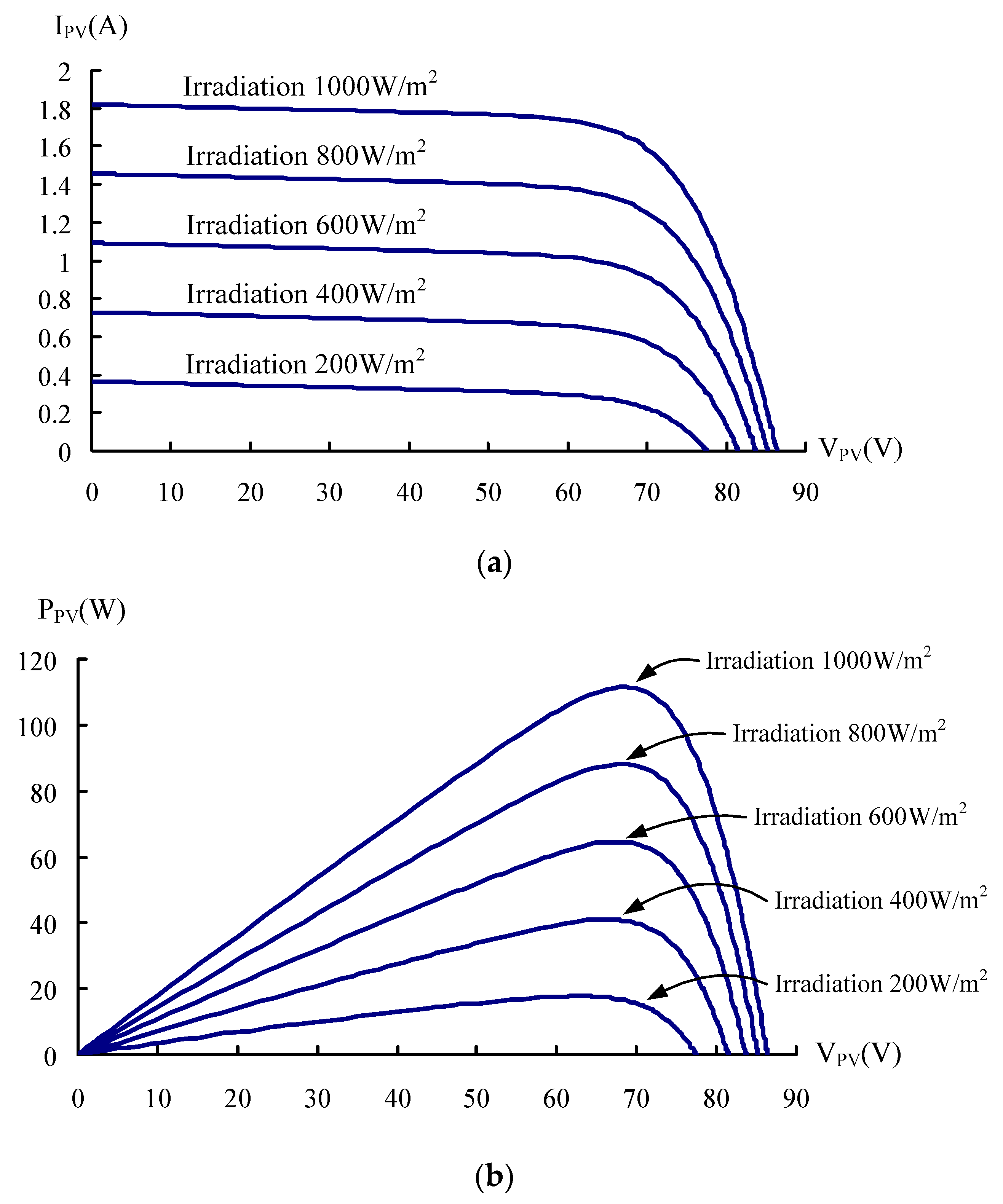
Section 2 described briefly the P-V and I-V characteristic curves for a PV module array under normal and shaded module conditions. Then, all the proposed and the most commonly seen PV module arrays in literature and practical applications are illustrated and compared in
Section 3.
Section 4 described briefly the implementation procedure of the proposed PSO algorithm to track the actual maximum power points when applied to multipeaked output characteristic curves of PV module arrays. The joint operation between a PSO-based global MPP tracker and a PV module array configuration strategy under shaded or malfunctioning conditions is presented in
Section 5. Final, in
Section 6, some experimental results are made to demonstrate the effectiveness of the proposed MPP tracker and a PV module array configuration strategy.
3. PV Module Array Configurations
All the proposed and the most commonly seen PV module arrays in literature and practical applications can be categorized into 6 types [
13,
14] as follows in terms of the way they are configured: (1) the first is referred to as a series array, since all the PV modules are connected in series, but a major disadvantage is a significant drop in the output current in the event of shaded or malfunctioning module; (2) the second is referred to as a parallel array, since all the modules are connected in parallel, but a major disadvantage is a considerable drop in the output voltage in case of shaded or malfunctioning module; (3) the third is referred to as a serial-parallel array, the most widely used configuration due to easy implementation, where PV modules are firstly connected in series and then in parallel; (4) the fourth is referred to as a total cross-tied (TCT) array where a number of PV modules are firstly connected in parallel as a subsystem, and multiple subsystems are then connected in series. In this manner, the performance of a PV module array can be improved relative to a parallel or series array; (5) the fifth is referred to as a bridge-linked (BL) array, where the PV modules are interconnected in a bridge rectifier fashion, but a disadvantage is that a partially shaded module is found to affect all the neighboring PV modules, which gives rise to a drop in both the output voltage and current, and an MPP tracker, as presented in [
13], cannot successfully perform a tracking task in a BL array; and (6) the last is referred to as a honey-comb (HC) array, where all the PV modules are interconnected in a honey comb topology. In this context, the output power can be elevated to a certain extent under particular, but not all, partially shaded conditions.
All the six types of normal operating arrays deliver the same level of output power under identical operating conditions, i.e., irradiation and module surface temperature. Nonetheless, different array configurations account for different levels of output power in any shaded or module failure event. Providing less amount of output current or voltage than expected in normal operation, a partially shaded, or malfunctioning, PV module demonstrates adverse effect on all the adjacent modules, such that the overall output power falls. For this sake, a smart algorithm is developed as a way to optimize the array configuration for operation at the global MPP at all events.
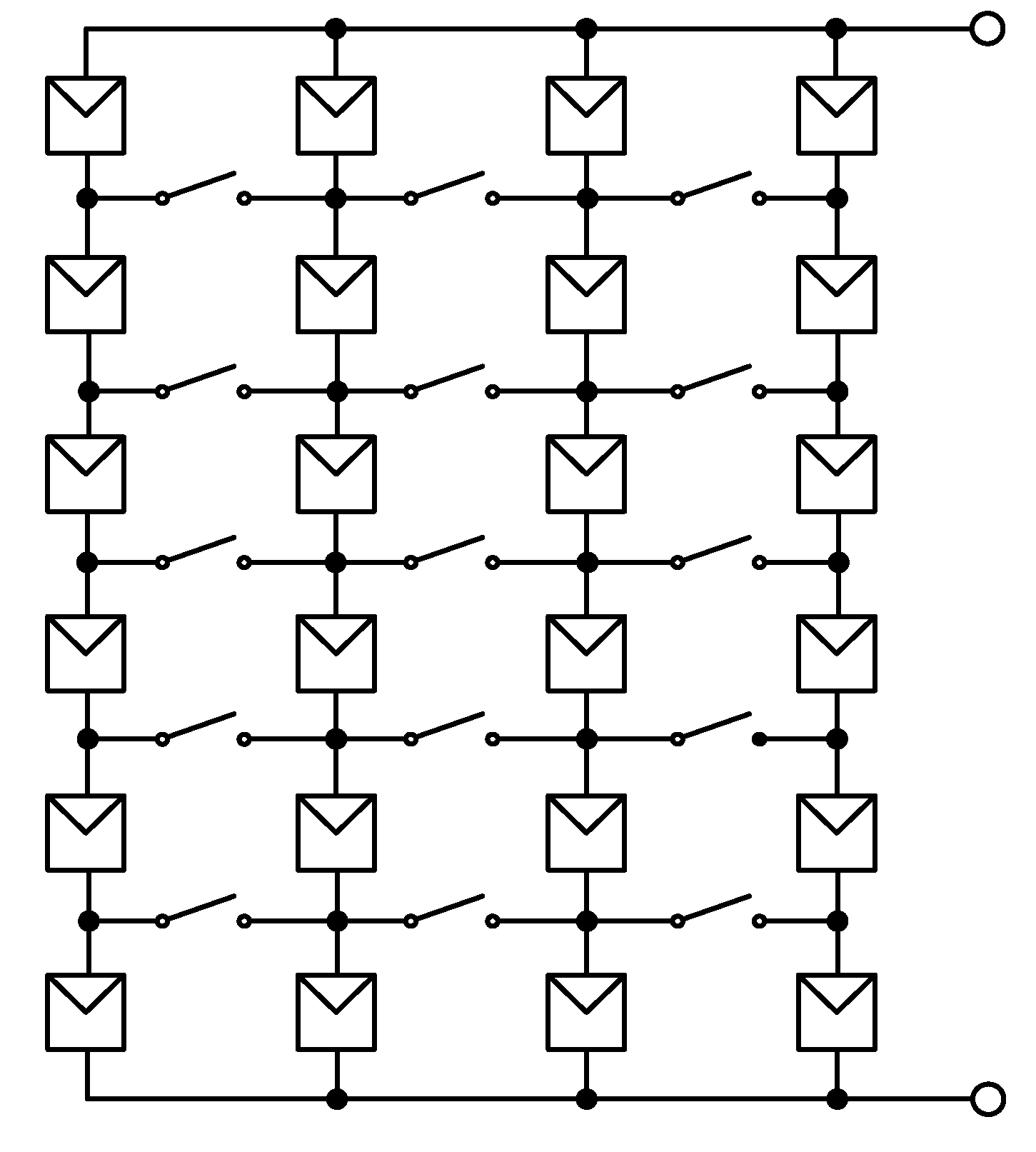
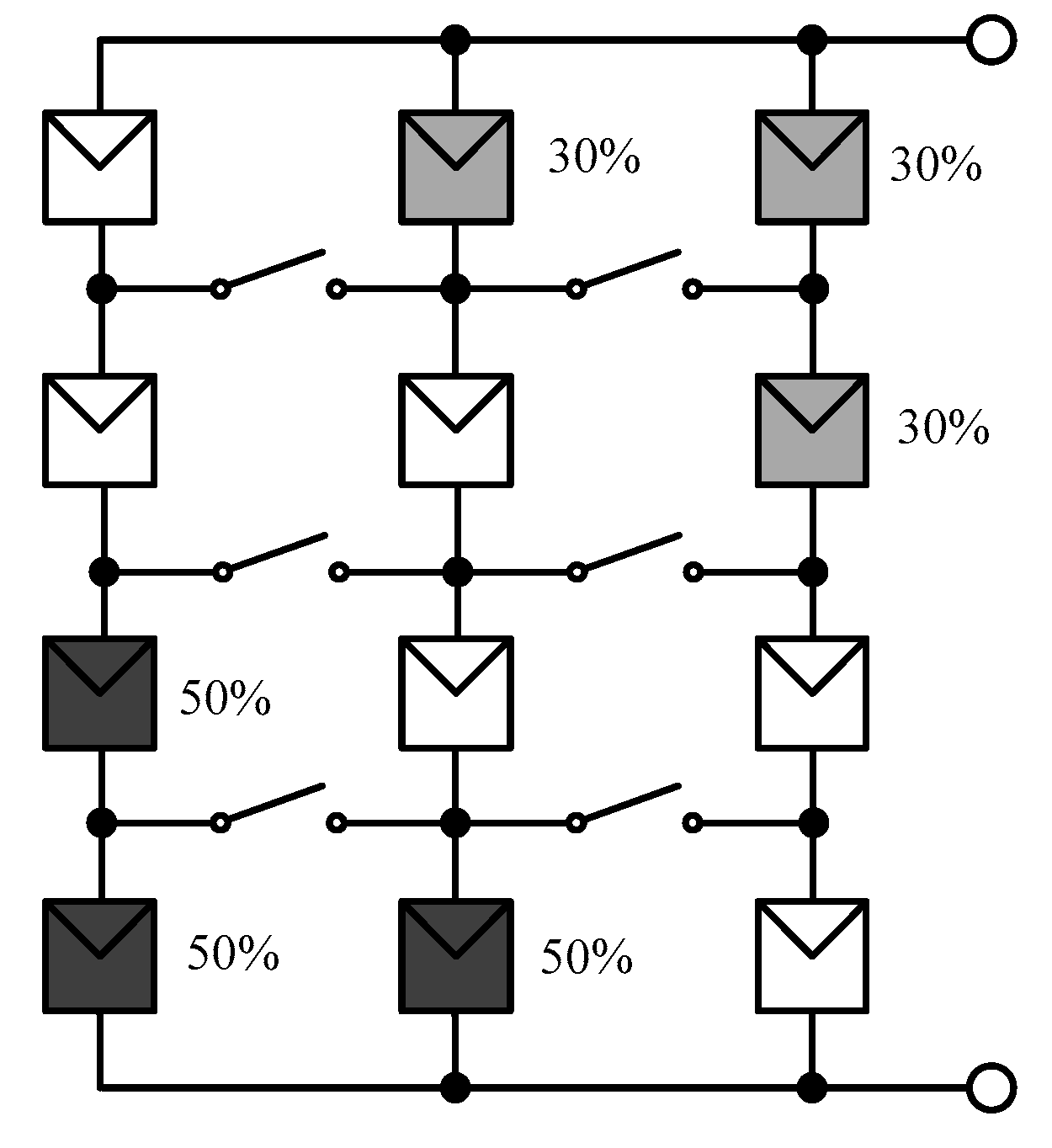
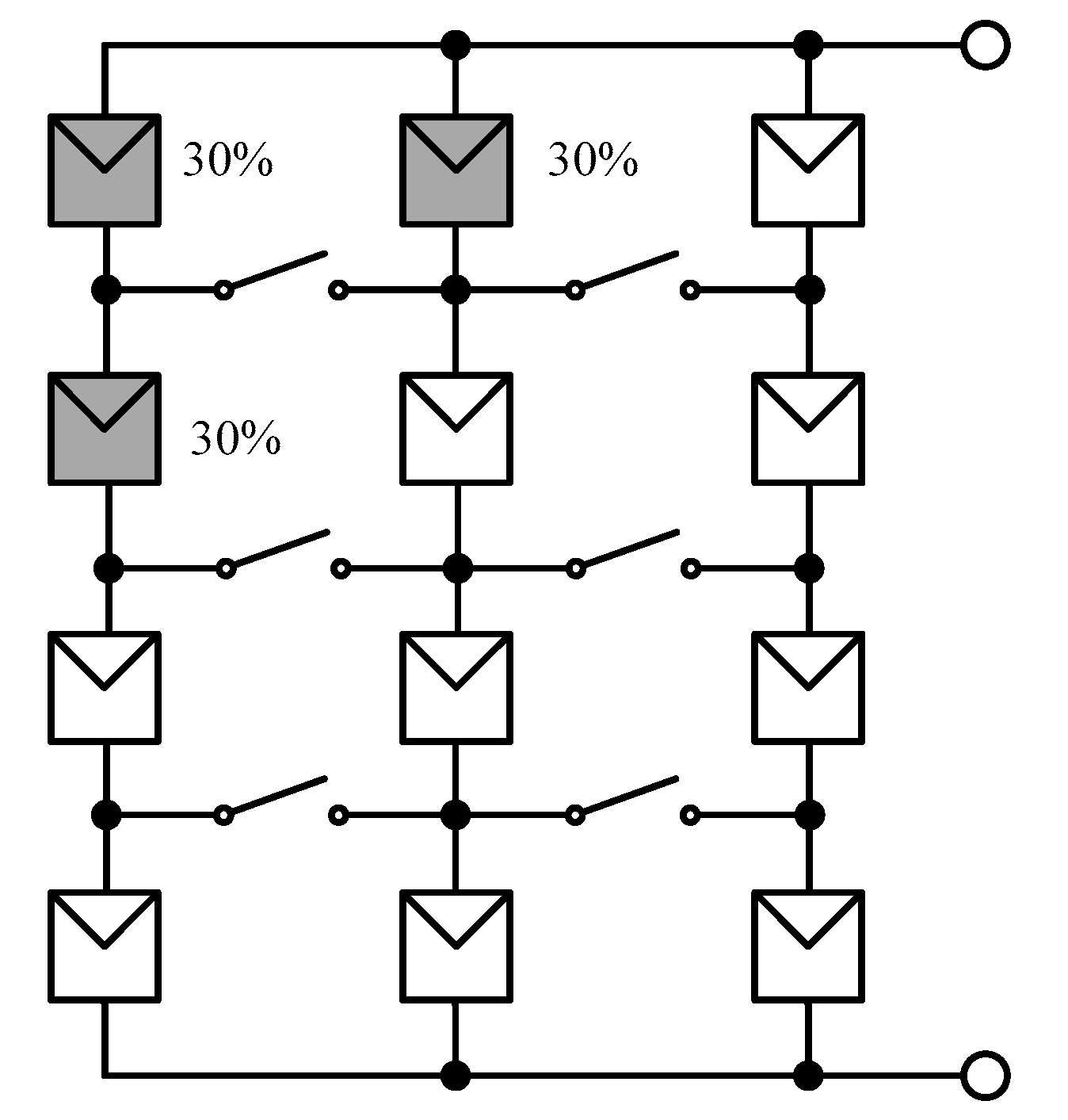
As illustrated in
Figure 3, there is a single switch between neighboring PV modules deployed along adjacent branches. This presented smart algorithm is demonstrated through a skillful manipulation of switch conduction. Accordingly, the module configuration is optimized in any case whenever there is a shadow or/and malfunction event in a PV module(s), such that the PV module array operates constantly at the global MPP as intended. This novel algorithm is development based on a PSO algorithm, which will be detailed in the following section.
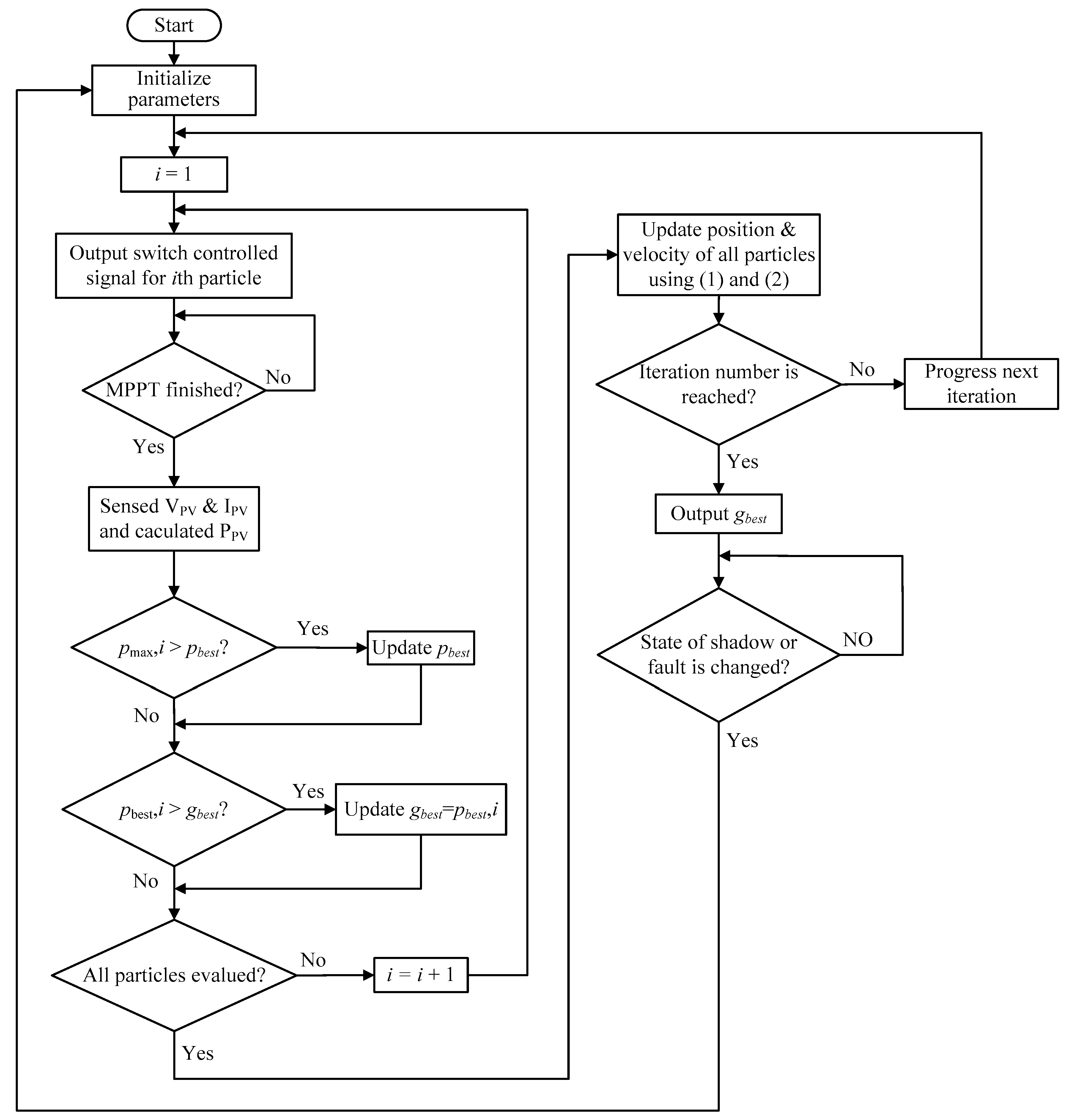
4. Typical PSO Algorithm
Proposed by Kennedy and Eberhart in 1995 [
15,
16], the particle swarm optimization (PSO) algorithm is of collective intelligence and pertains to a certain type of evolutionary algorithm. The development of the original PSO algorithm is inspired by the way a flock of birds forage, and is successfully applied to resolve a number of optimization problems such as described in [
17]. Suppose that there is a bird, referred to as a particle in a PSO algorithm, flying in the sky. Each moving particle in the space is associated with a fitness value and is aware of its current optimal fitness value and position, referred to as the particle optimal value
pbest.
pbest is in essence the individual experience of each particle, and the global optimum as well as the optimal position, referred to as the global optimal value
gbest, is shared by all the particles. For this sake, the position and the velocity of each particle are updated through the experience of individual particle and the whole particle swarm. To begin with, all the particles are randomly distributed over the field of interest. Provided that a particle verges on an optimal object value, all the particles will search toward the same optimal object value, which may be a local, but may not be the global, optimum. Thus,
gbest must be updated in order that all the particles can converge to the global optimum [
18].
As stated previously, a PSO algorithm performs a comprehensive search task in a distributed manner with memory over a search scope. In the original PSO algorithm, the velocity of each particle is updated through the differences between the velocity and
pbest/
gbest, and the position is updated by the updated velocity. Accordingly, the search difference radius and direction are updated. A typical PSO algorithm is stated as follows [
19]:
- Stept 1
Build an optimal object function,
- Stept 2
Initialize a particle swarm, and then generate the initial position and velocity of each particle in a random manner,
- Stept 3
The fitness value of each particle is evaluated through the object function and is then compared with those of others so as to find the particle optimal value pbest, by which the search direction of each particle is updated,
- Stept 4
Either the particle optimal value pbest or the global optimal value gbest is saved as the updated gbest, whichever is larger, by which the search direction of each particle is updated,
- Stept 5
The velocity and position of a particle is updated by the kernel equation in the PSO algorithm, expressed as:
where
and
respectively represent the velocities of particle
j at discrete time instants
k + 1 and
k,
C1 and
C2 the learning factors,
w the inertia weighting,
the optimal value of particle
j at time instant
k,
gbest the global optimal value,
and
the positions of particle
j at time instants
k + 1 and
k, and rand (·) a random number between 0 and 1, and
- Stept 6
The procedure for finding the fitness of a fitness function is repeated until the global optimization solution is found or the specified number of iterations is reached.
6. Experimental Results
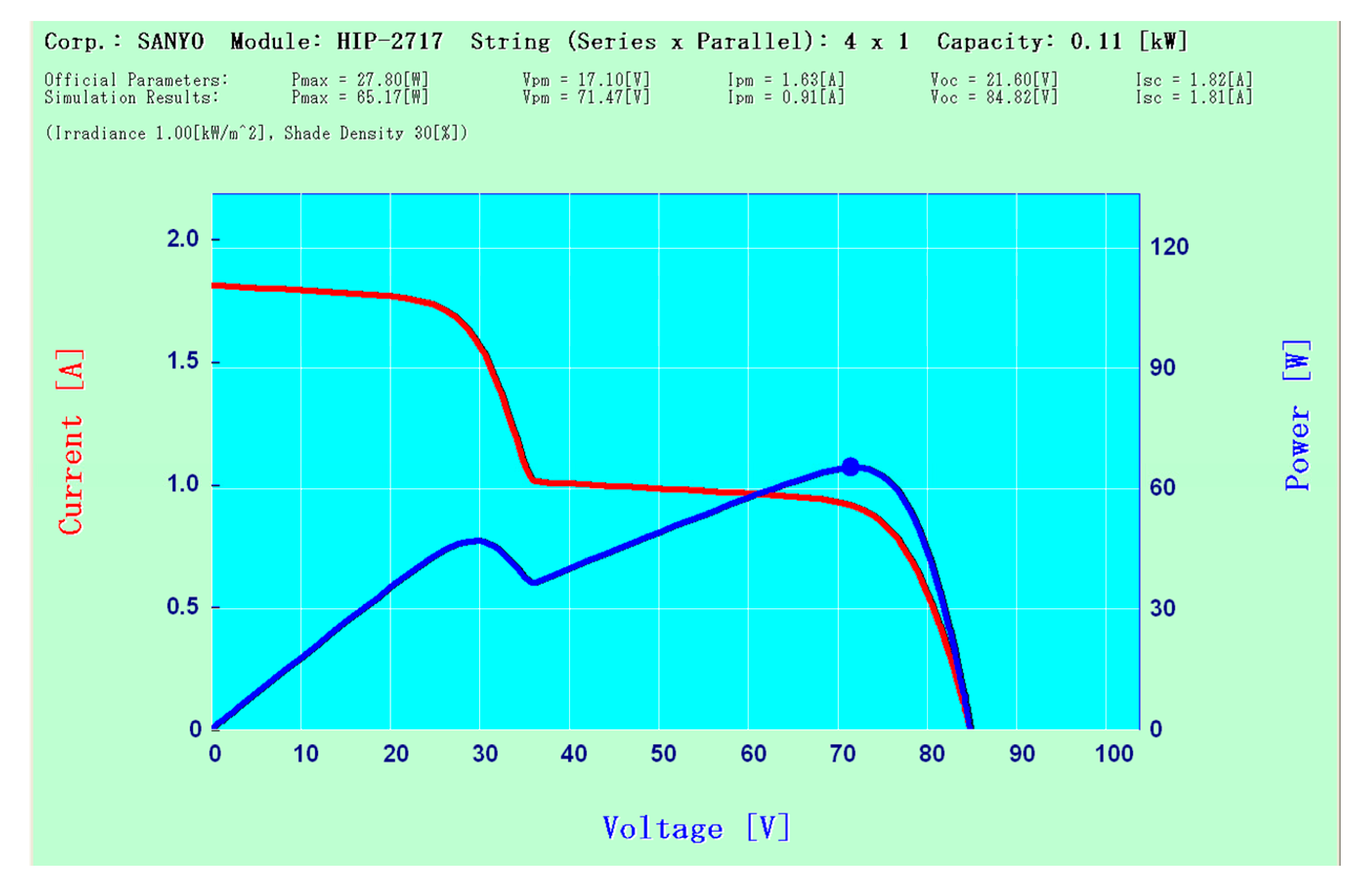
Experiments are conducted on a 4-series 3-parallel array built with SANYO HIP2717 modules. Tabulated in
Table 1 are the electric specifications of an HIP 2717 module under standard test condition (STC) [
12] and in
Table 2 are PSO-parameters employed in this work. In general,
C1,
C2, and
w in the traditional PSO algorithm are fixed values set to
w = (10 −
C1 −
C2)/10. Therefore, the parameters of this paper are chosen as shown in
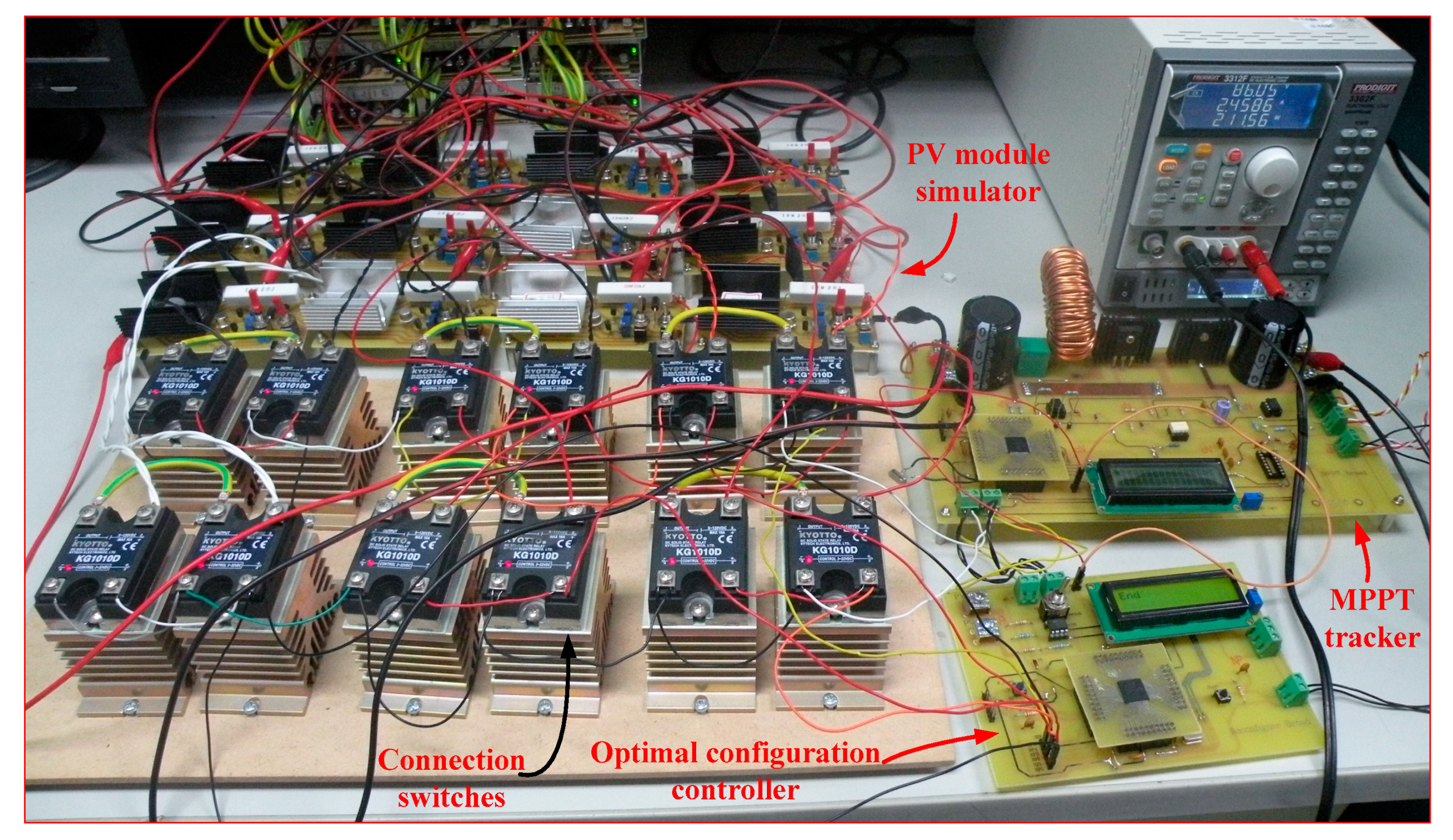
Table 2. The experimental results also show that the selected parameters respond quickly and can track to the global maximum power point. Because the more particles, the longer the time of per iteration, the particles are chosen four to shorten the time of each iteration. The measured results show that the global maximum power point can be tracked in any test case. Exhibited in
Figure 6 is a photo of the tracking system under test for arbitrary partially shaded and/or malfunctioning module cases.
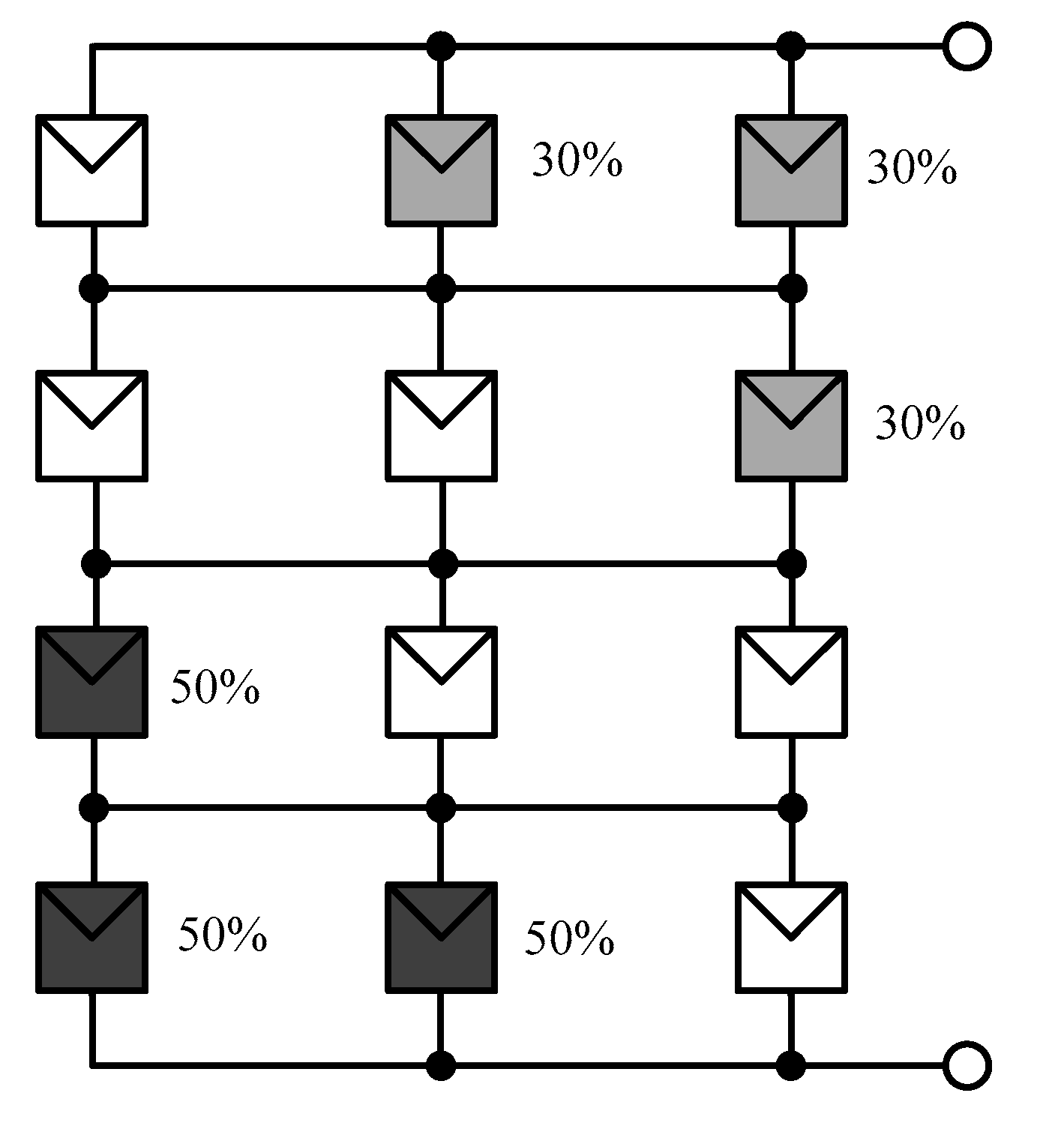
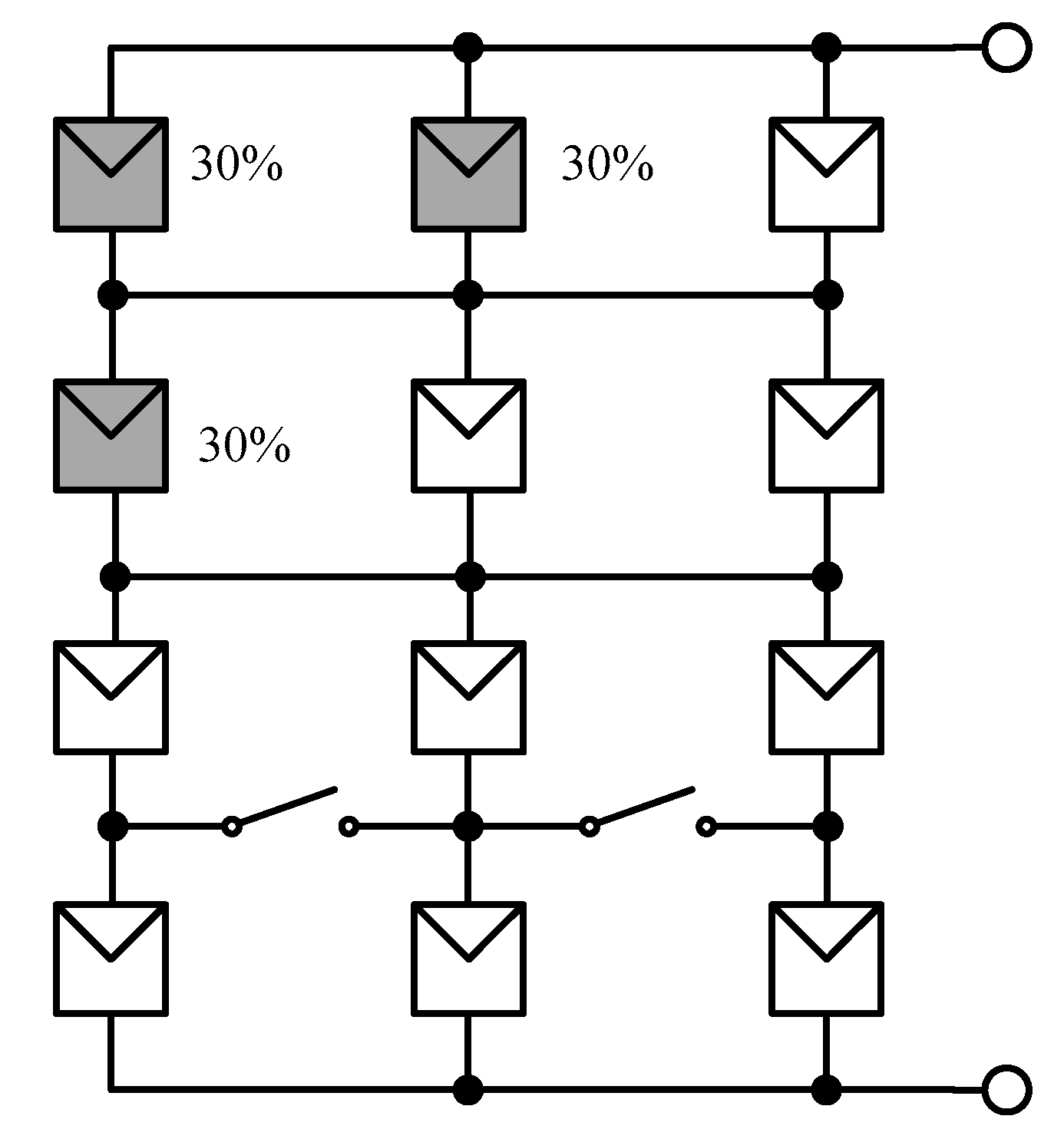
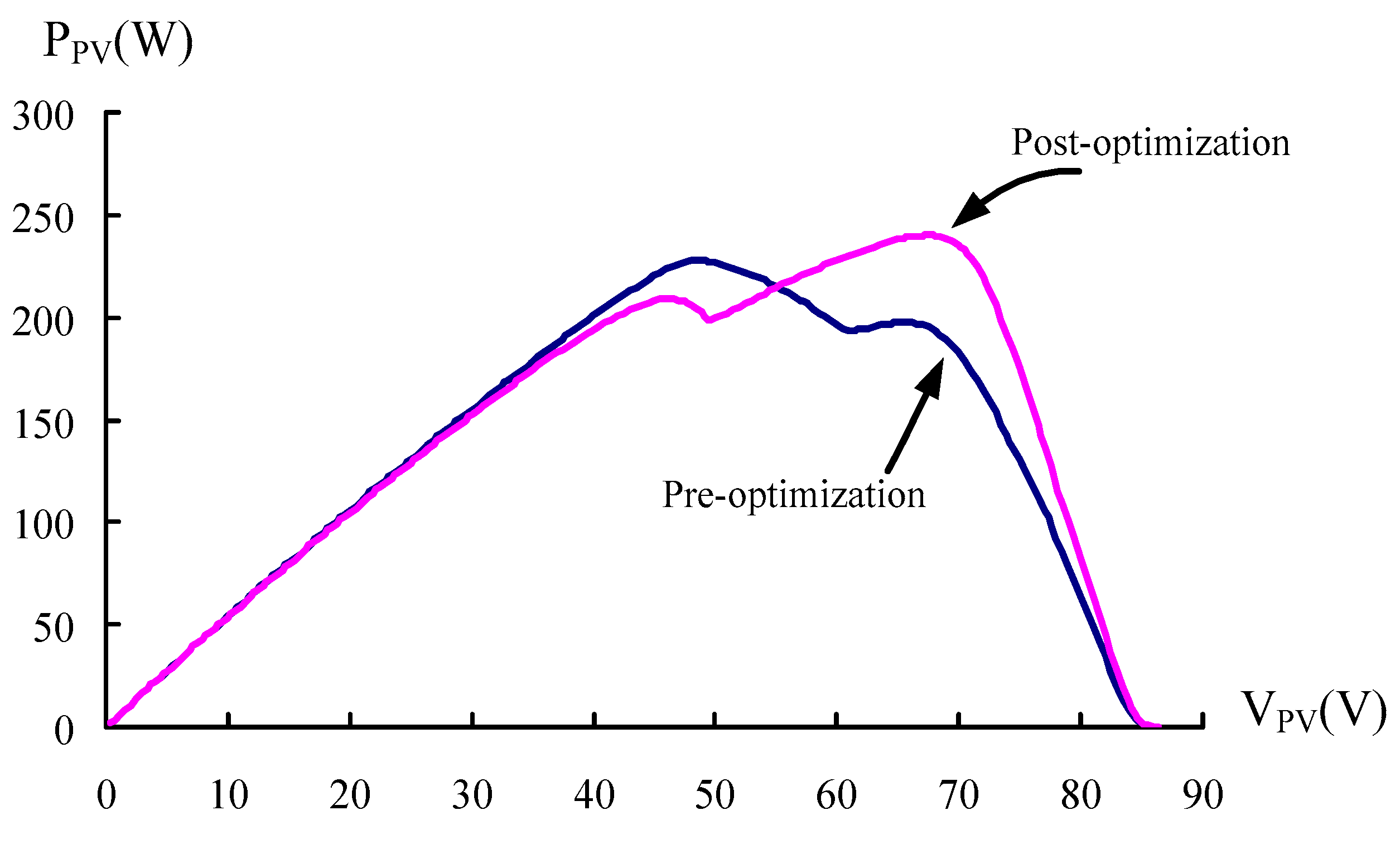
Test Case 1 refers to a case where there are three 30% shaded PV modules at the upper right corner and three 50% shaded modules at the lower left corner, as illustrated in
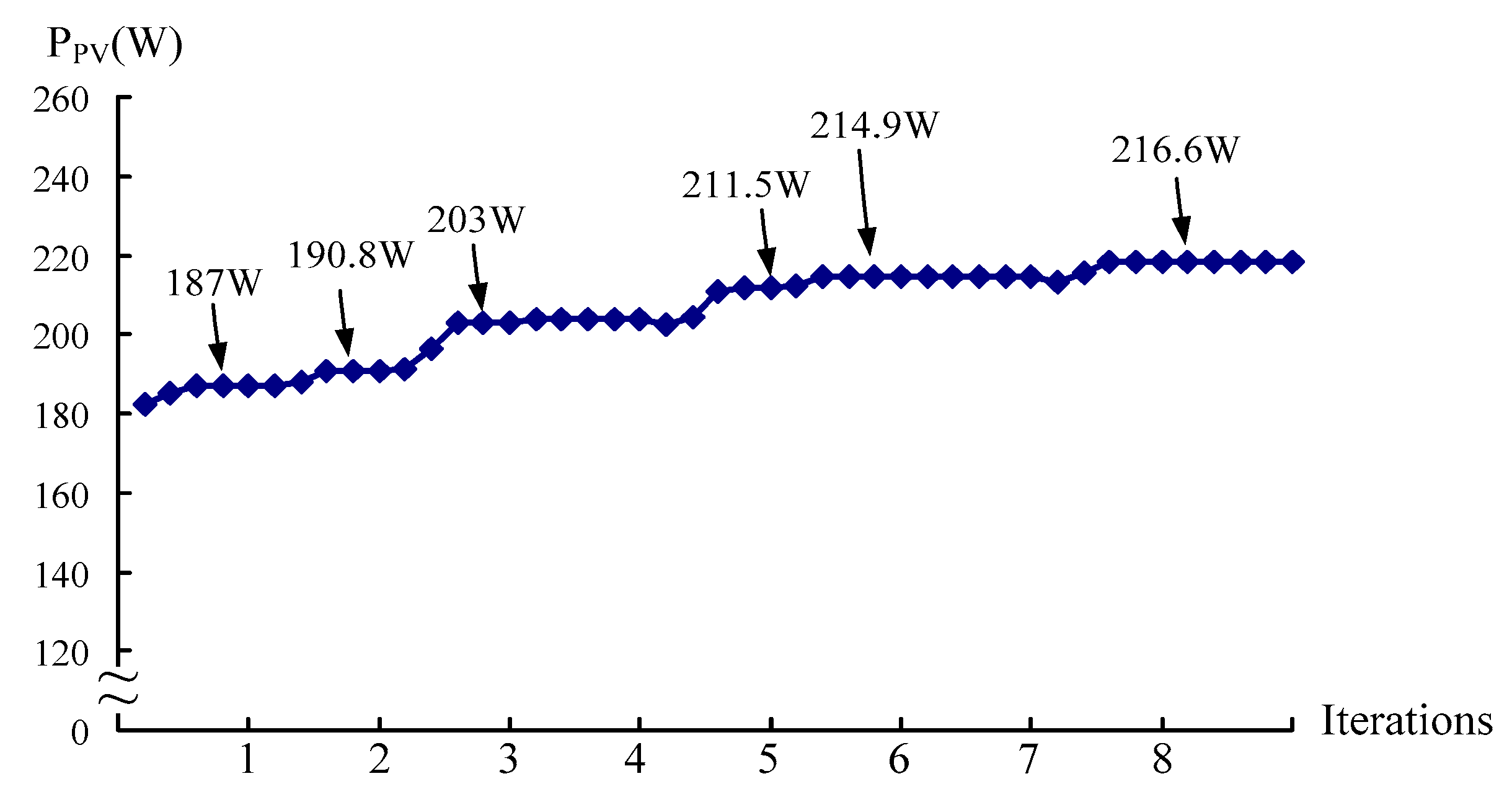
Figure 7. Presented in
Figure 8 is a plot of the global optimal value
gbest versus the number of iterations, and in
Figure 9 is the P-V characteristic curve comparison between pre- and post-output power optimization, while in
Figure 10 is the optimized PV module configuration. As can be seen in
Figure 8, the optimized module configuration is successfully found following 7 iterations, and it is indicated in
Table 3 that the optimization leads to a 16.68% rise (31.4 W) in the output power.
As presented in
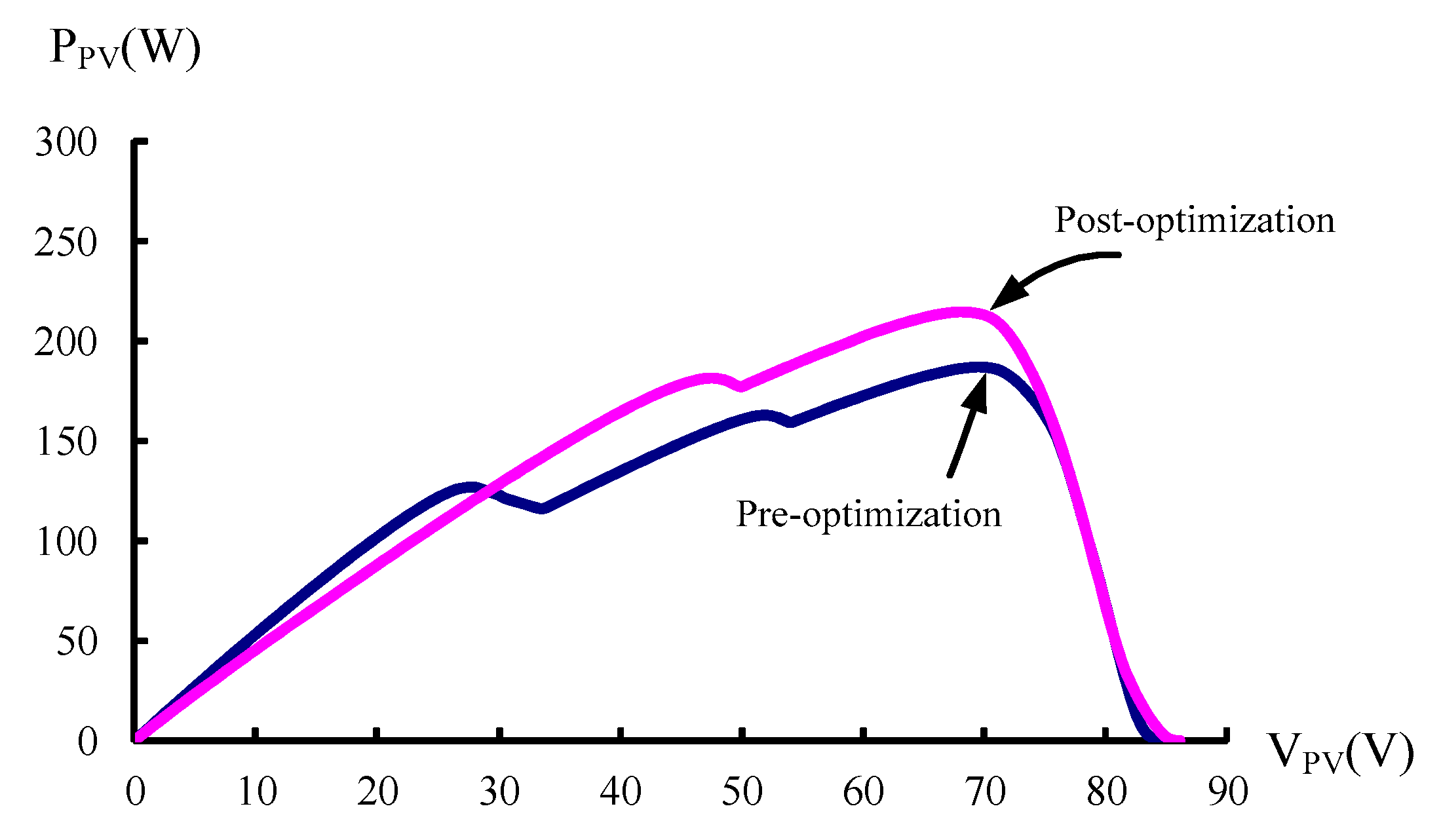
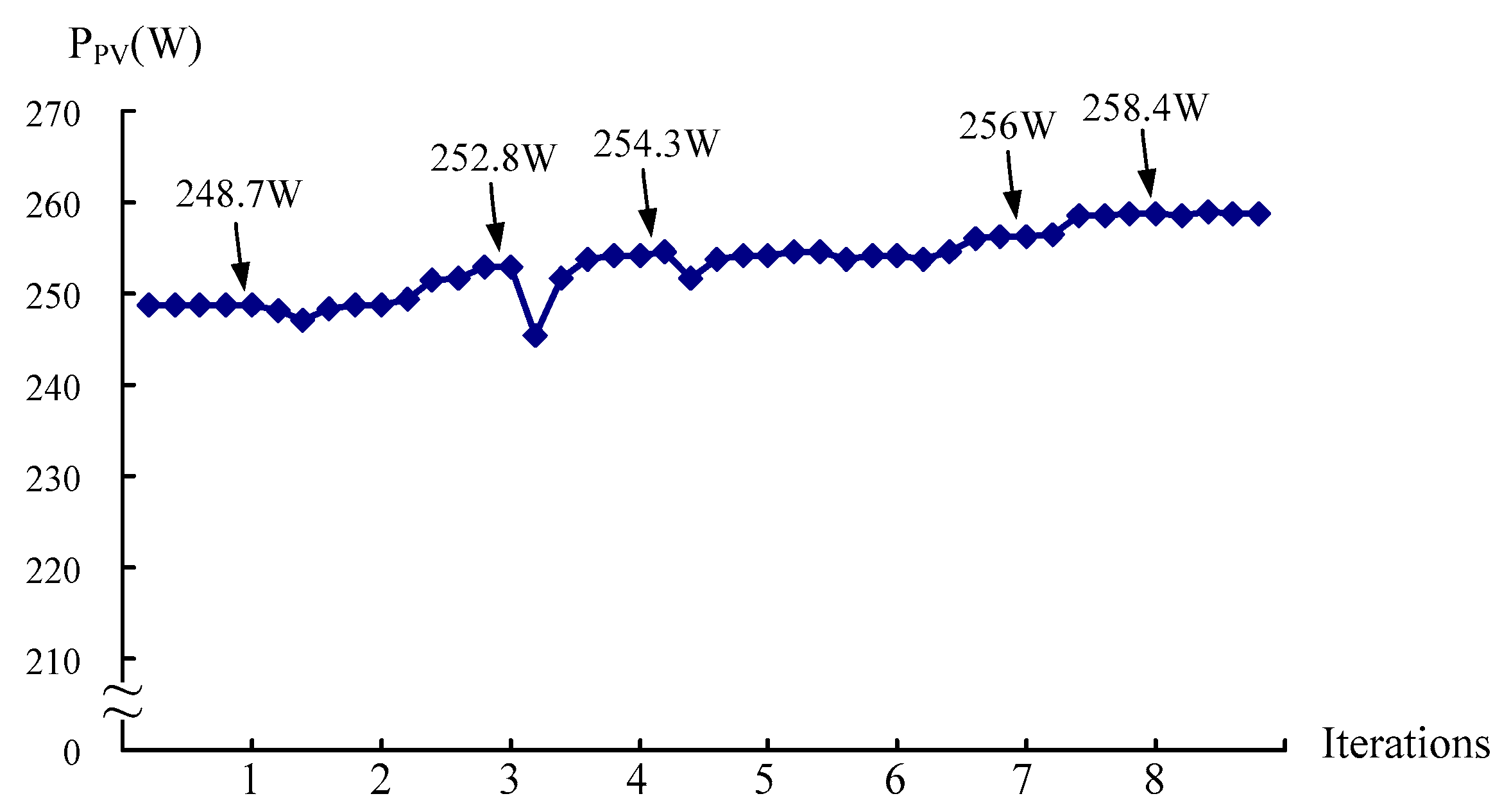
Figure 11, there are three 30% shaded PV modules at the upper left corner in test Case 2, and the output power is plotted against the number of iterations in
Figure 12. The comparison of P-V characteristic curves between the pre- and the post-optimization cases is exhibited in
Figure 13, and the optimized PV module configuration is demonstrated in
Figure 14. It is found in
Figure 12 that the configuration is successfully optimized following 7 iterations.
Table 4 gives a 3.22% rise (8.06 W) in the output power after optimization.
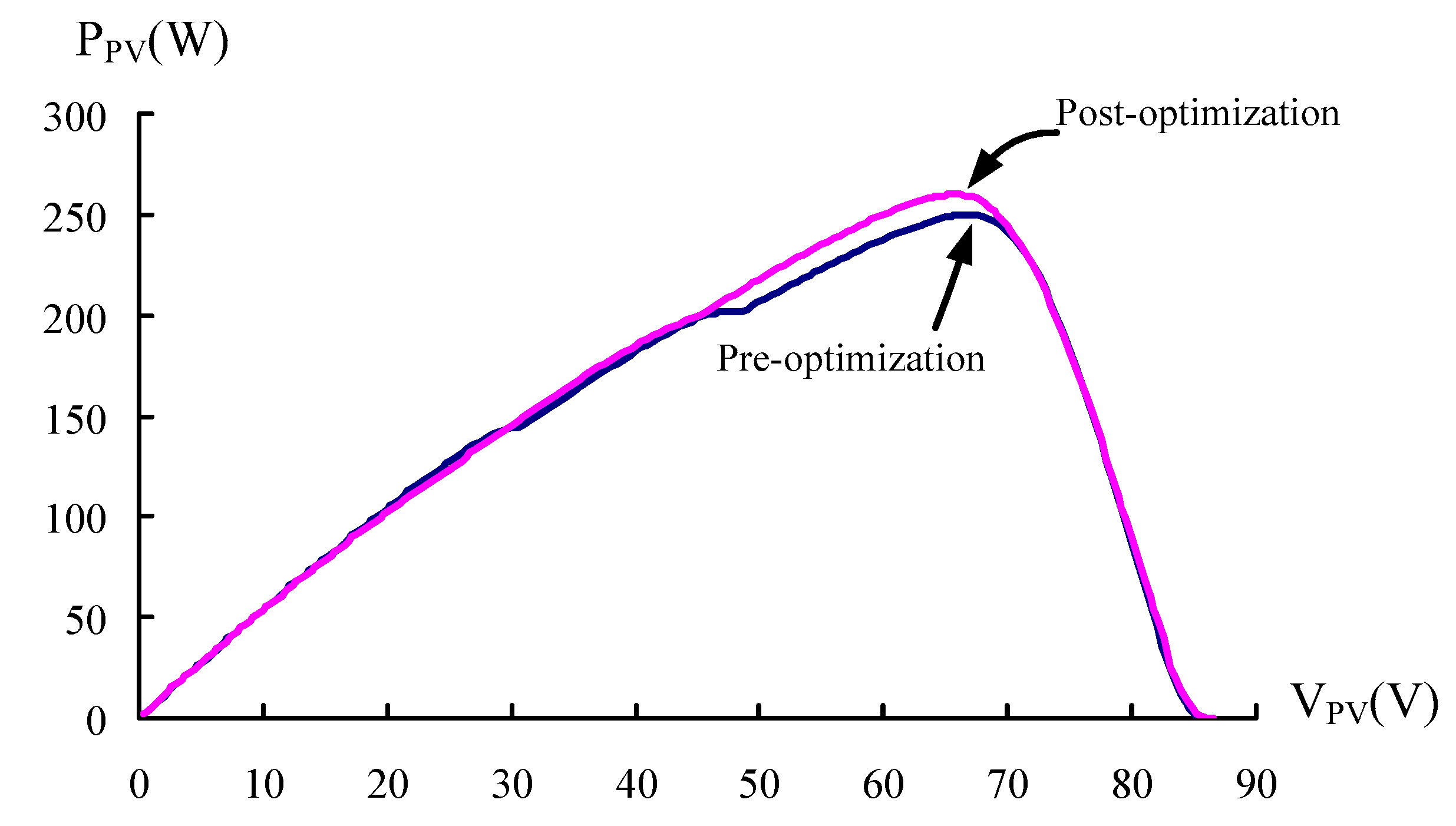
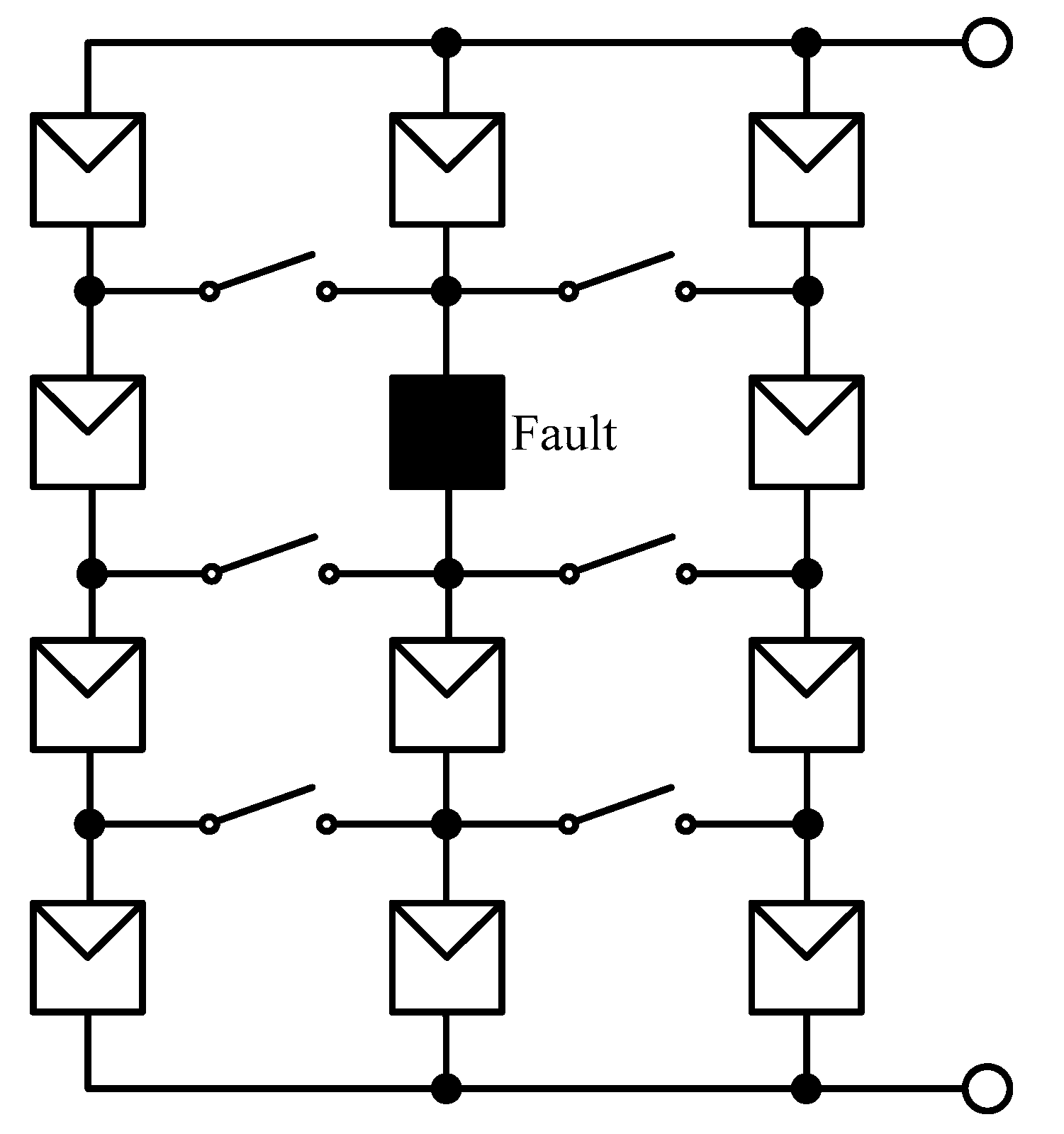
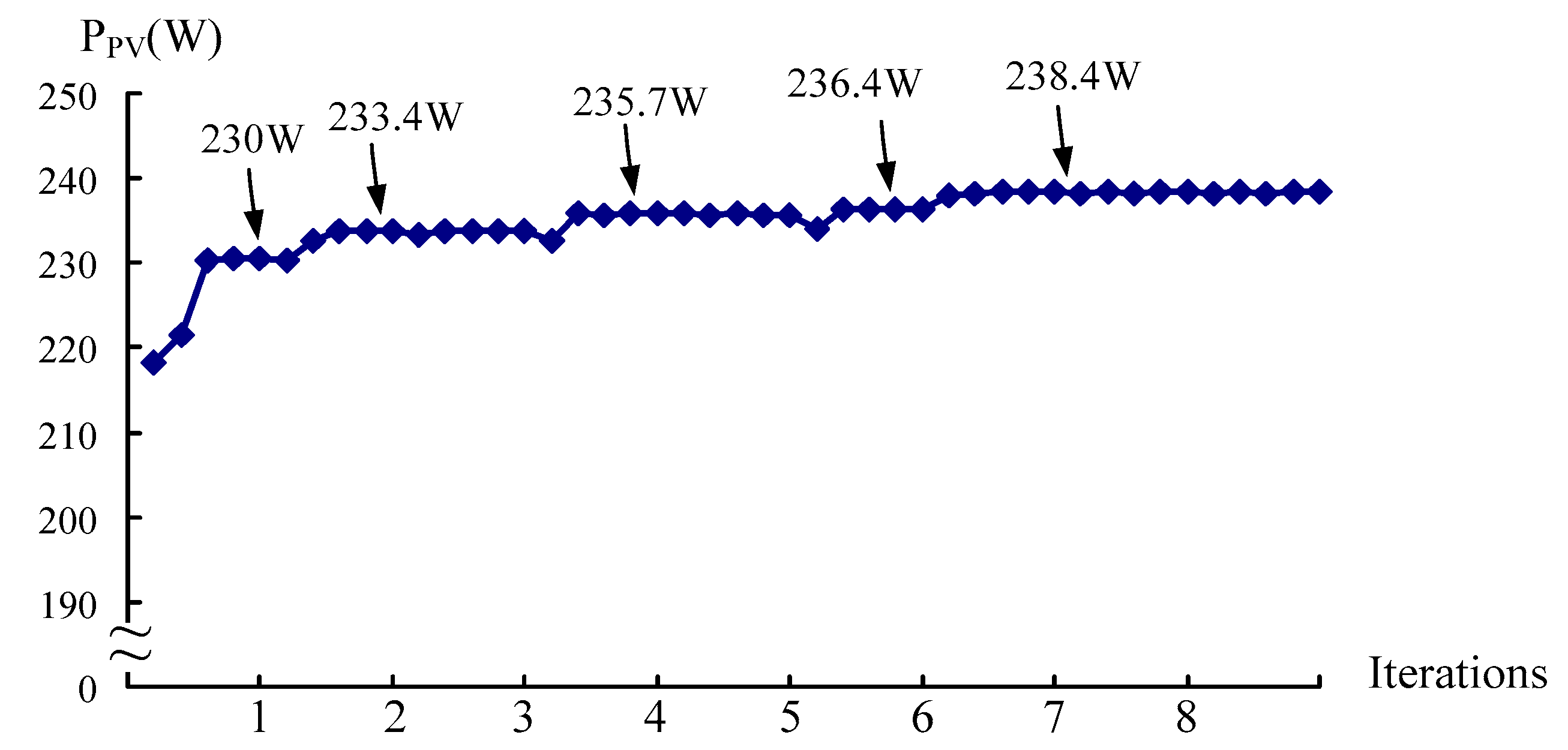
As illustrated in
Figure 15, there is a single PV malfunctioning module, the second in the middle branch. A plot of the output power versus the number of iterations performed is presented in
Figure 16, a comparison of P-V characteristic curves is made between the pre- and post-optimization cases in
Figure 17, and the optimized module configuration is demonstrated in
Figure 18. It is noted in
Figure 16 that the PV module configuration in this case is optimized following 6 iterations, and
Table 5 gives a 4.12% rise (9.51 W) in the output power after optimization.
The curves in
Figure 8,
Figure 9,
Figure 12,
Figure 13,
Figure 16 and
Figure 17 are drawn with the data collected using PIC microcontroller. Because the microcontroller does not have the ability to draw, the data collected from microcontroller is then rendered in a MatLab software package. In a word, all the figures are presented with real data.
In this paper, experiments are conducted on a 4-series 3-parallel PV array with SANYO HIP2717 modules. Tabulated in
Table 1 are the electric specifications of HIP2717 module under standard test condition. Therefore, the theoretical maximum output power of a 4-series 3-parallel PV array is 334.44 W at standard test condition. The theoretical maximum power outputs for pre-optimization and post-optimization of three different shaded test cases at standard test condition are listed in
Table 3,
Table 4 and
Table 5, respectively. The theoretical maximum power of the PV module array is approximately 334.44 W in normal operation, but only 188.29 W, 250.51 W and 230.89 W were extractable without the optimized configuration strategy in Case 1, Case 2 and Case 3 shaded or fault conditions, respectively. Therefore, the utilization factors of the PV module array without the optimized configuration strategy are 0.563, 0.749 and 0.690, respectively. However, 219.7 W, 258.57 W and 240.4 W can be extracted with the optimized configuration strategy in Case 1, Case 2 and Case 3 shaded or fault conditions, respectively. The utilization factors of the PV module array can be promoted to 0.657, 0.773 and 0.719, respectively. So it proved that the power generation efficiency of the PV module array can be improved by using the proposed PSO-based global MPP tracker and PV module array optimized configuration strategy under shaded or malfunctioning conditions.
The three test cases investigated in the present study underwent MPPT for 8 iterations under the proposed PSO-based global MPP tracker. According to the average tracking time and MPP tabulated in
Table 6, the method accurately identified the real MPP.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}