A Novel Method for Estimating Wave Energy Converter Performance in Variable Bathymetry Regions and Applications




Abstract
:1. Introduction
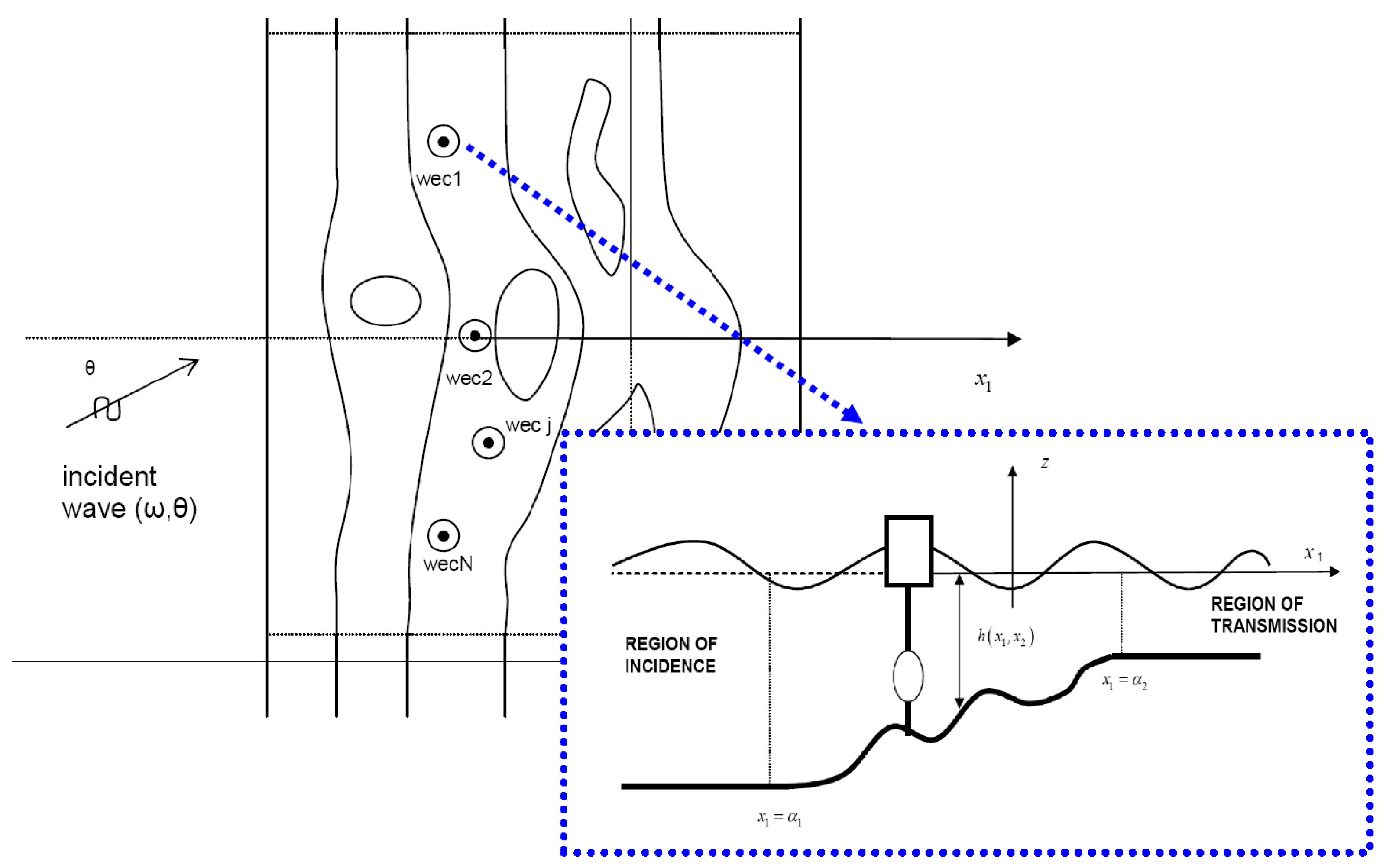
2. Formulation
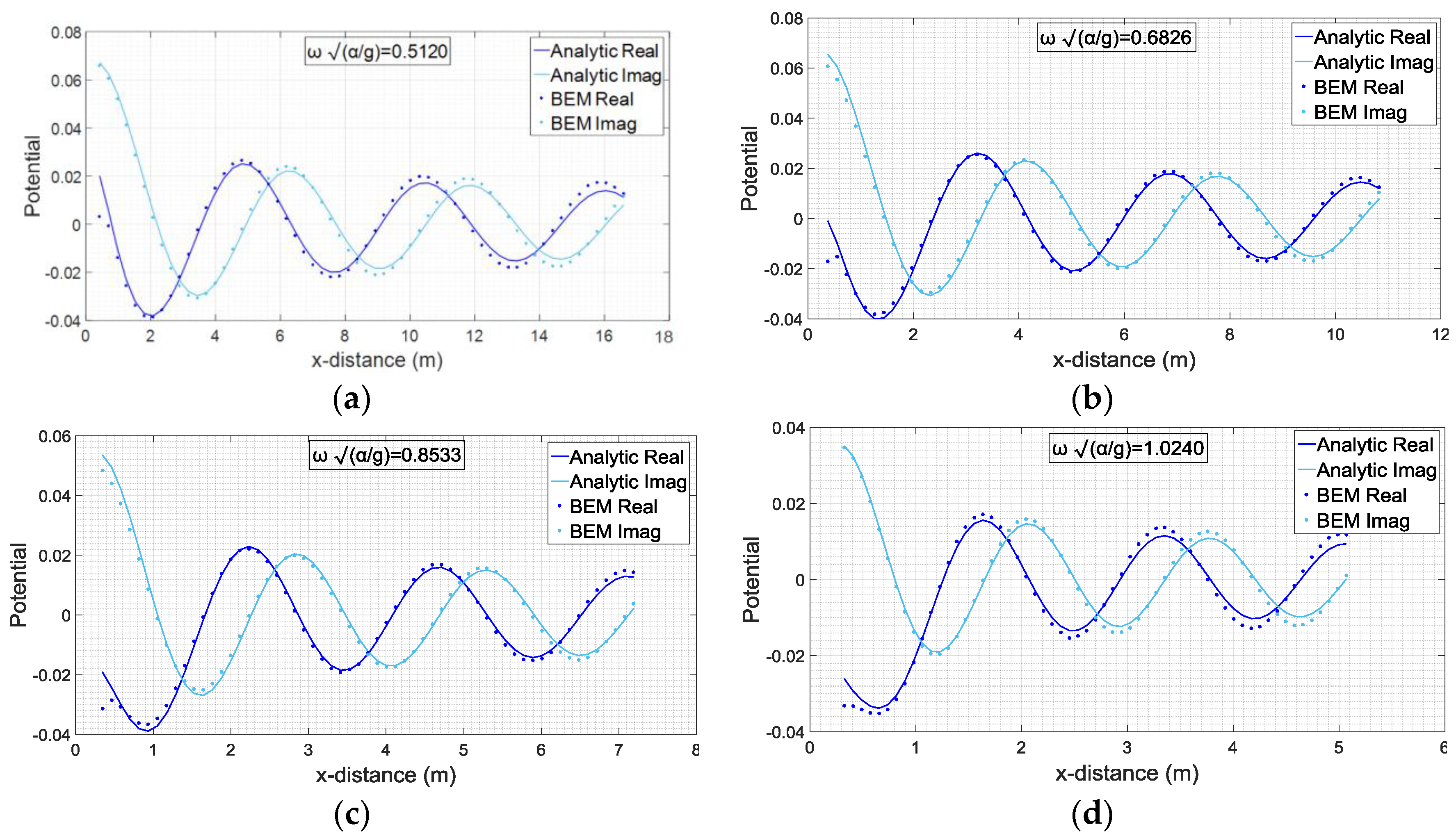
3. Propagating Wave Field
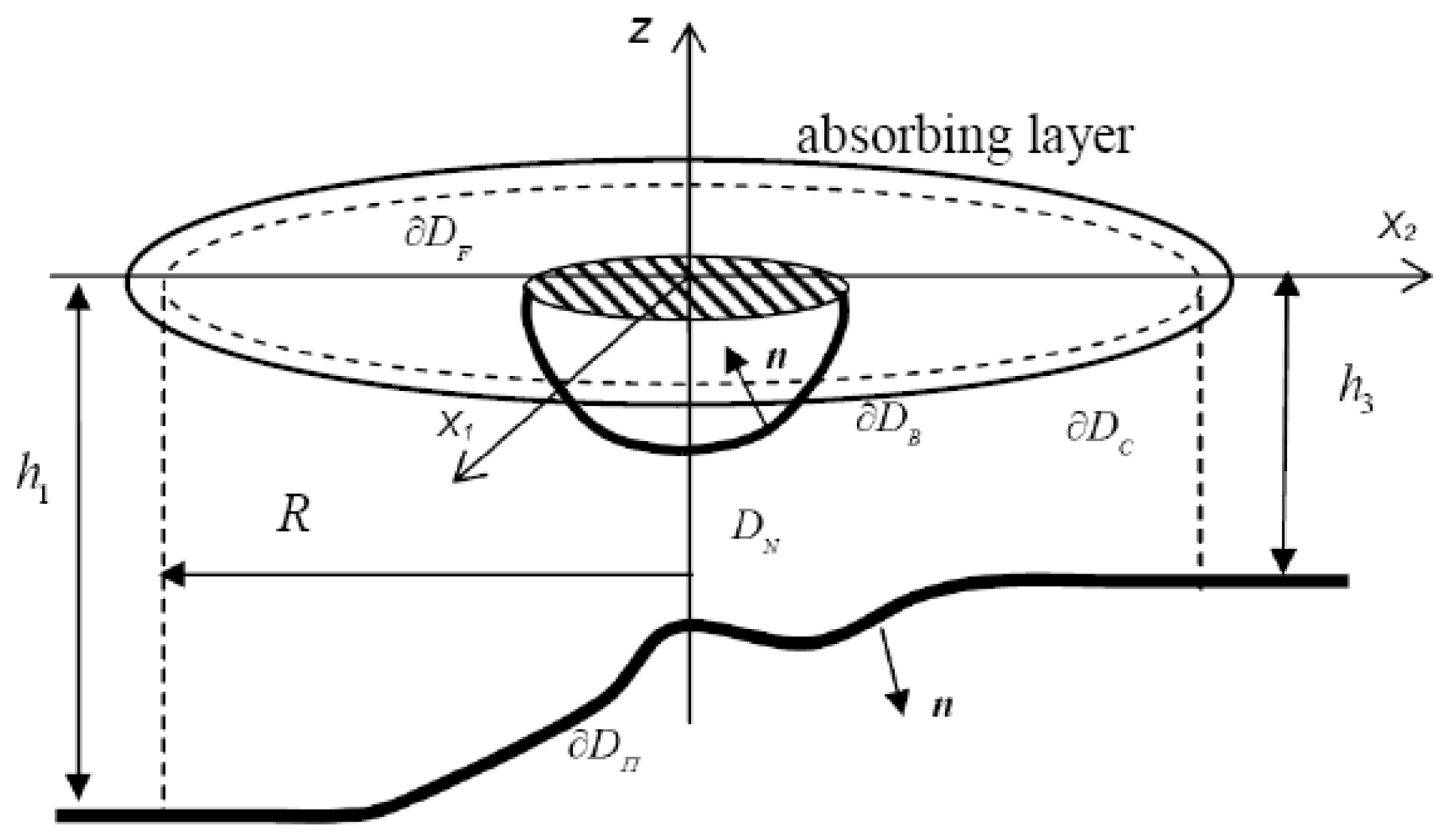
4. A Novel BEM for the Diffraction and Radiation Problems in 3D Environments
4.1. Investigation of the Optimal Parameters of the Absorbing Layer
- Dimensionless frequency
- Coefficient
- The activation length
- The exponent
- The number of panels per wave length (N/λ)
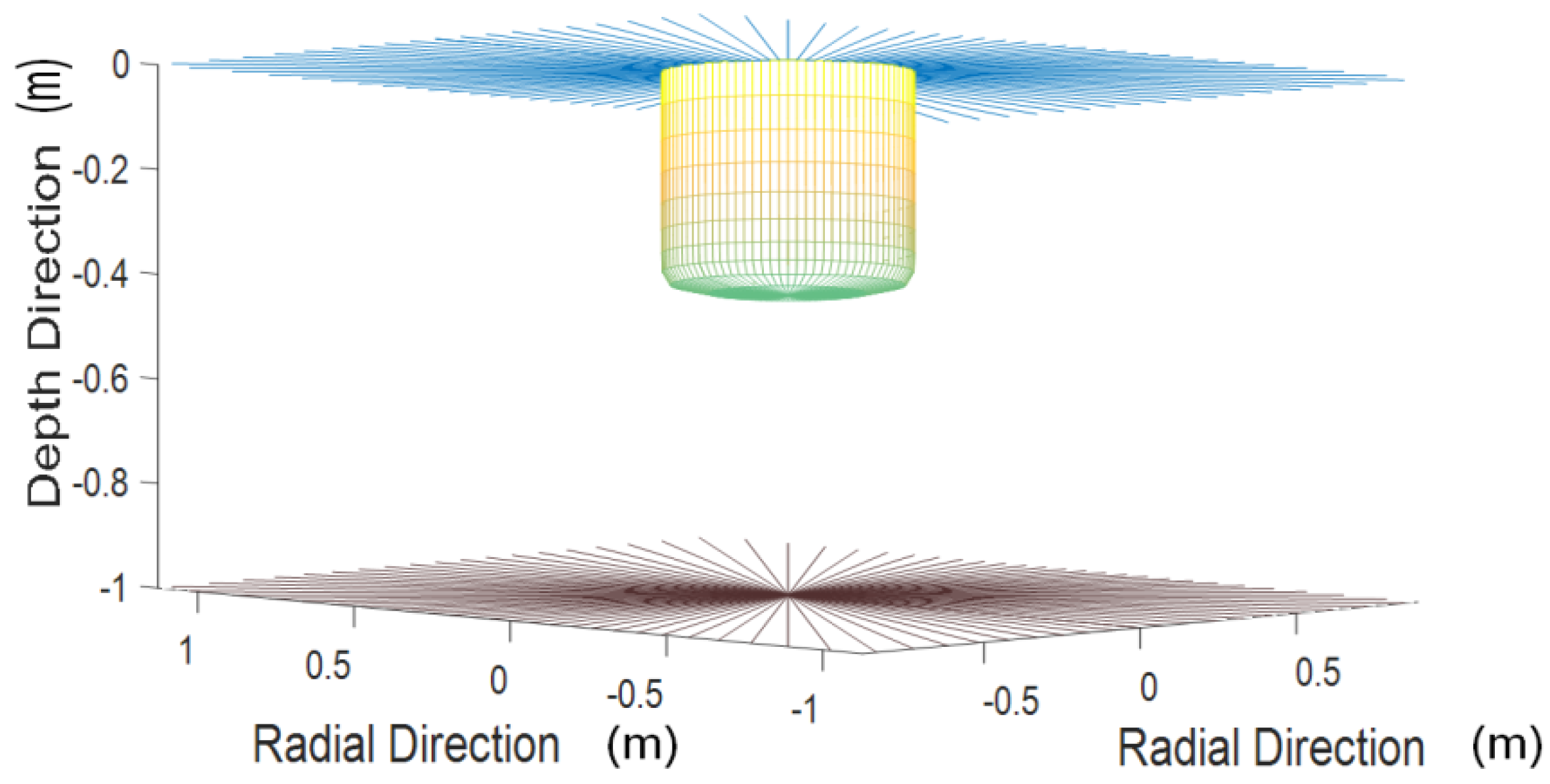
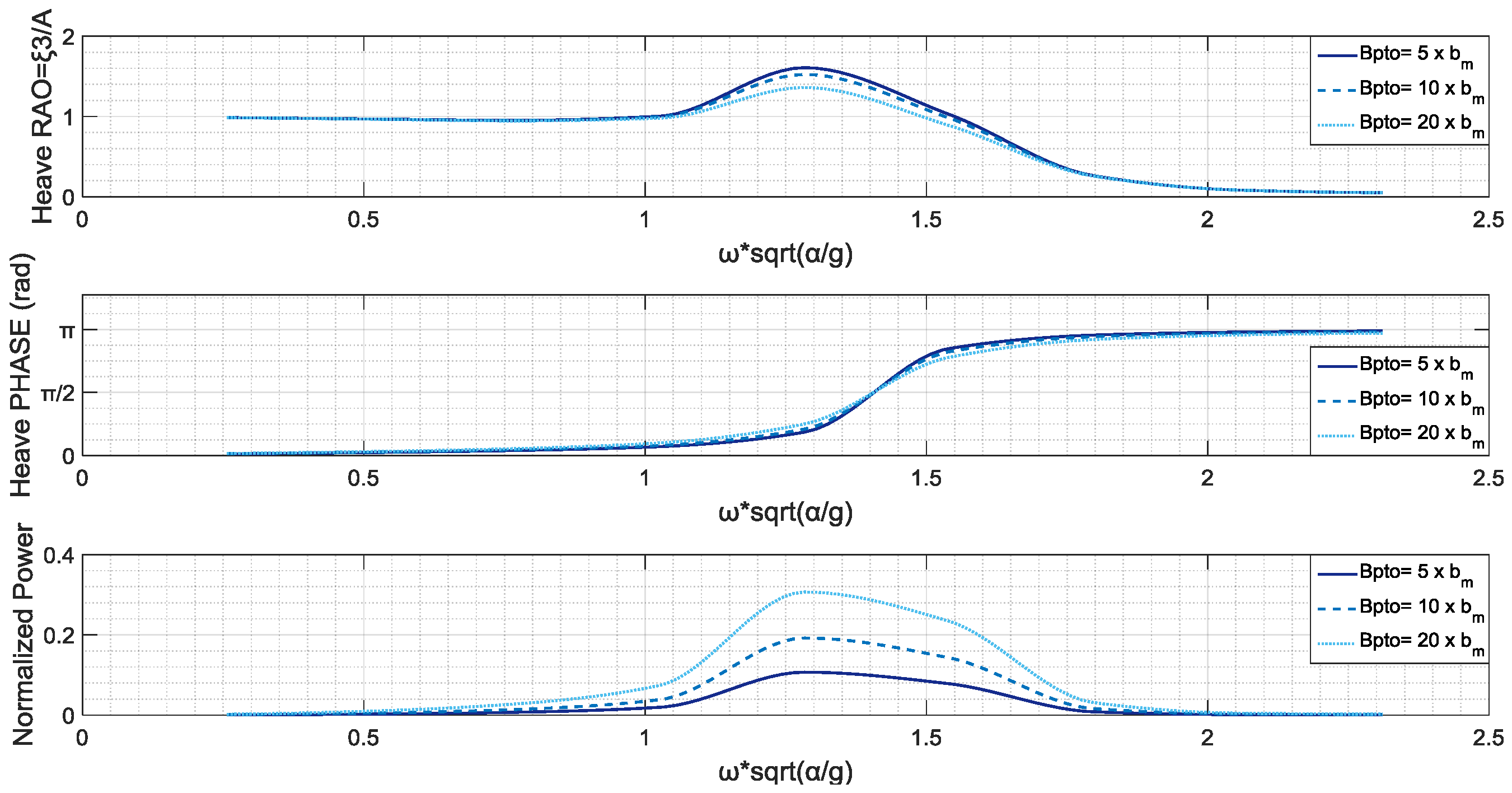
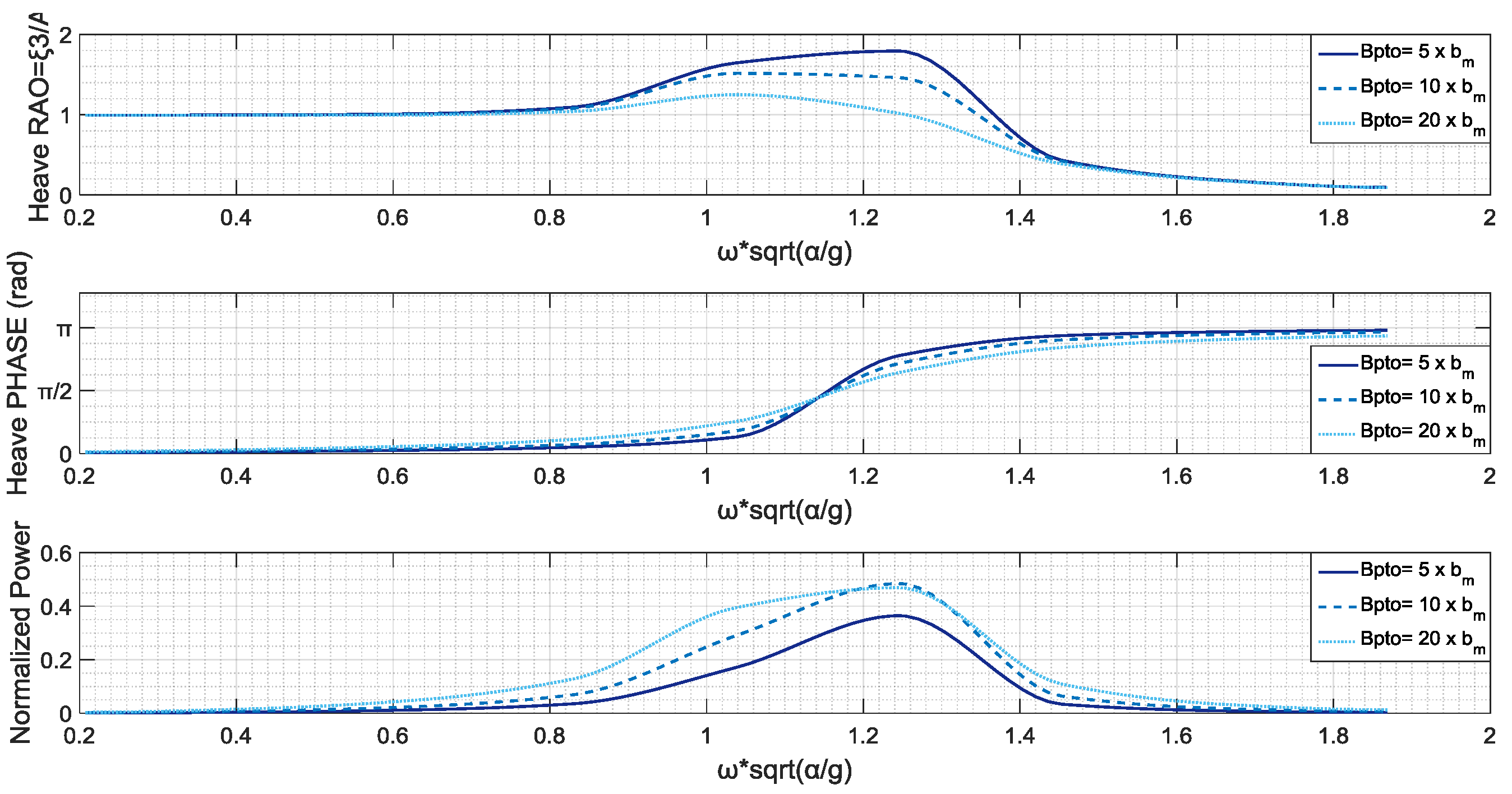
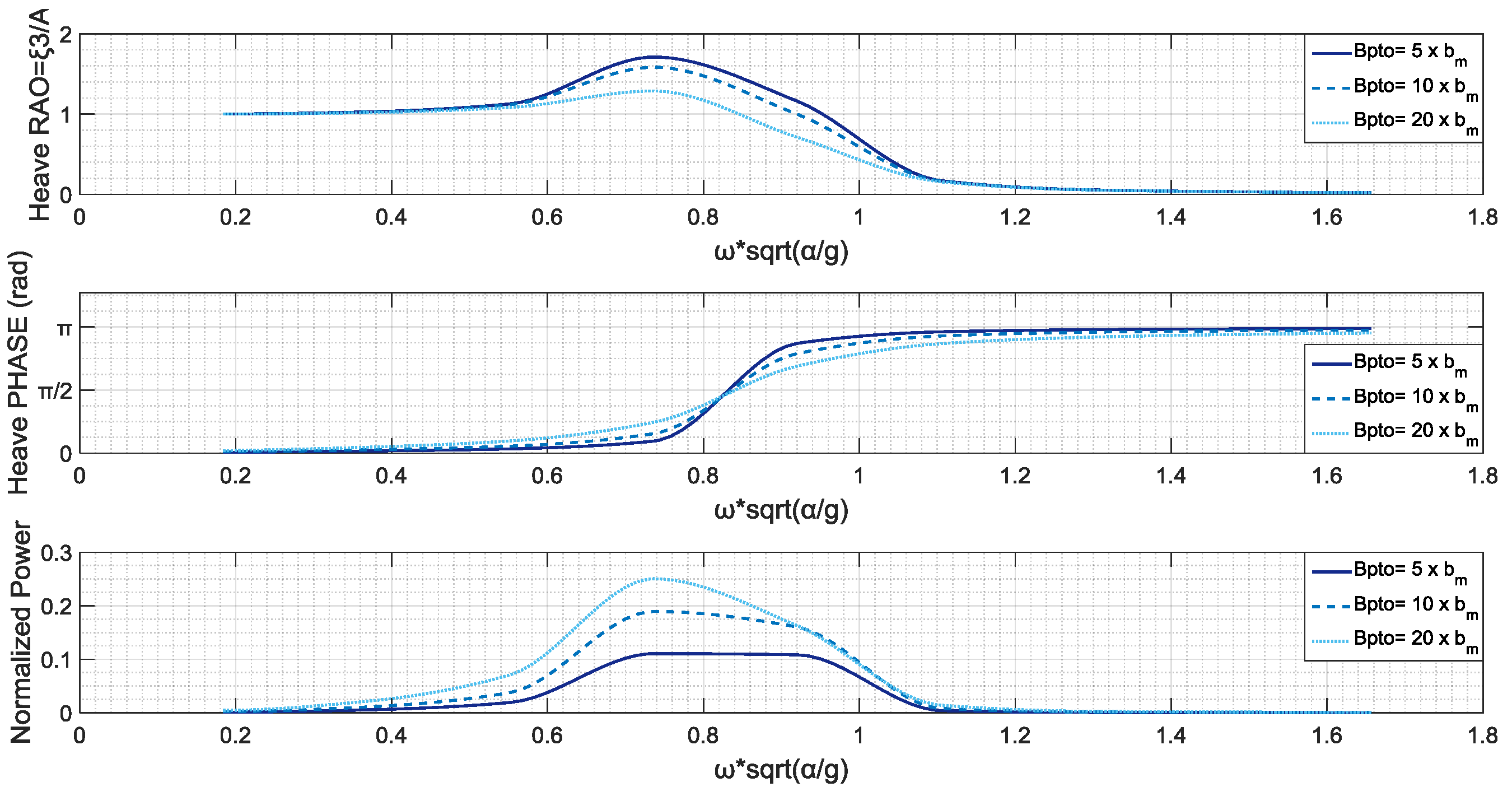
4.2. Power Output in the Case of Cylindrical WEC
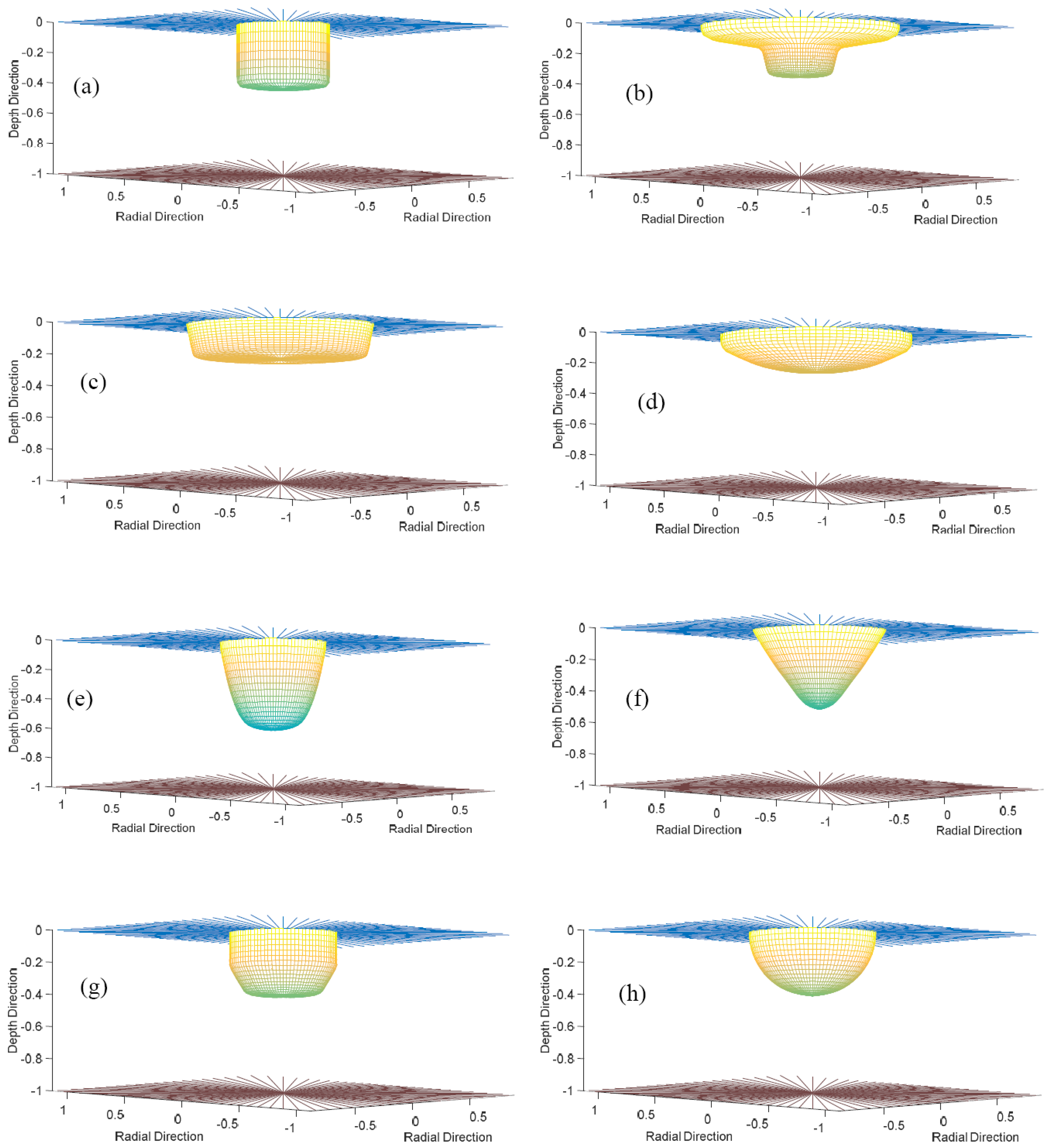
5. Examination of Other Shapes of Axisymmetric Floaters
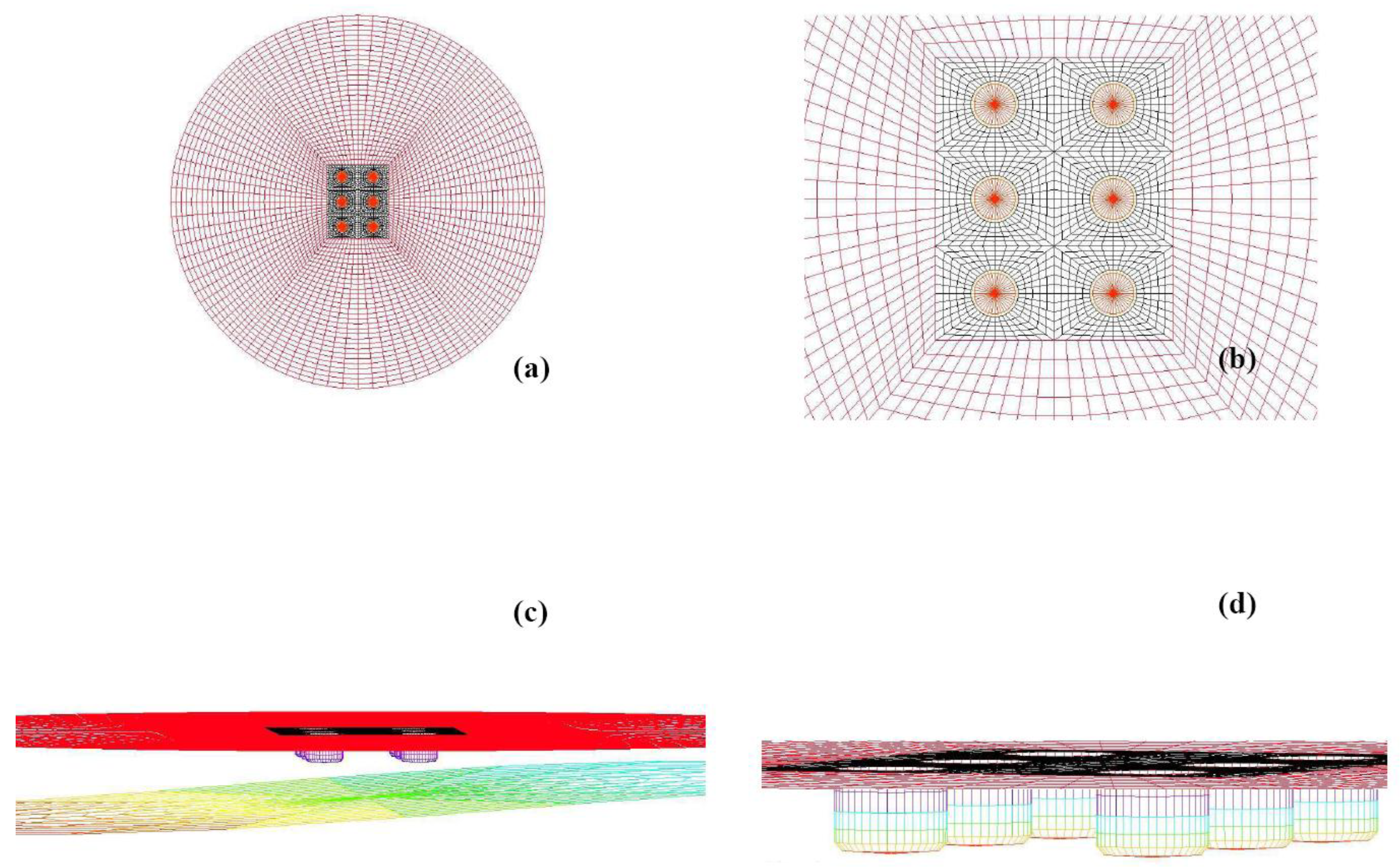
6. Extensions to Treat the WEC Arrays in Variable Bathymetry Regions
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BEM | Boundary Element Method |
| CMS | Coupled-Mode System |
| RAO | Response amplitude operator |
| PML | Perfectly Matched Layer |
| PTO | Power Take off |
| SWAN | Simulating Waves Nearshore |
| WEC | Wave Energy Converters |
References
- Mei, C.C. The Applied Dynamics of Ocean Surface Waves, 2nd ed.; World Scientific: Singapore, 1996. [Google Scholar]
- Sawaragi, T. Coastal Engineering-Waves, Beaches, Wave-Structure Interactions, 1st ed.; Elsevier: Amsterdam, The Netherlands, 1995. [Google Scholar]
- Williams, K.J. The boundary integral equation for the solution of wave–obstacle interaction. Int. J. Numer. Method. Fluids 1988, 8, 227–242. [Google Scholar] [CrossRef]
- Drimer, N.; Agnon, Y.; Stiassnie, M. A simplified analytical model for a floating breakwater in water of finite depth. Appl. Ocean Res. 1992, 14, 33–41. [Google Scholar] [CrossRef]
- Williams, A.N.; Lee, H.S.; Huang, Z. Floating pontoon breakwaters. Ocean Eng. 2000, 27, 221–240. [Google Scholar] [CrossRef]
- Drobyshevski, Y. Hydrodynamic coefficients of a two-dimensional, truncated rectangular floating structure in shallow water. Ocean Eng. 2004, 31, 305–341. [Google Scholar] [CrossRef]
- Drobyshevski, Y. An efficient method for hydrodynamic analysis of a floating vertical-sided structure in shallow water. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering (OMAE2006), Hamburg, Germany, 4–9 June 2006. [Google Scholar]
- Wehausen, J.V. The motion of floating bodies. Ann. Rev. Fluid. Mech. 1971, 3, 237–268. [Google Scholar] [CrossRef]
- Wehausen, J.V. Methods for Boundary-Value Problems in Free-Surface Flows: The Third David W. Taylor Lecture, 27 August through 19 September 1974. Available online: https://www.researchgate.net/publication/235068177_Methods_for_Boundary-Value_Problems_in_Free-Surface_Flows_The_Third_David_W_Taylor_Lecture_27_August_through_19_September_1974 (accessed on 15 July 2018).
- Charrayre, F.; Peyrard, C.; Benoit, M.; Babarit, A. A coupled methodology for wave body interactions at the scale of a farm of wave energy converters including irregular bathymetry. In Proceedings of the 33th International Conference on Offshore Mechanics and Arctic Engineering (OMAE2014), San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- McCallum, P.; Venugopal, V.; Forehand, D.; Sykes, R. On the performance of an array of floating energy converters for different water depths. In Proceedings of the 33th International Conference on Offshore Mechanics and Arctic Engineering (OMAE2014), San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Guazzelli, E.; Rey, V.; Belzons, M. Higher-order bragg reflection of gravity surface waves by periodic beds. J. Fluid Mech. 1992, 245, 301–317. [Google Scholar] [CrossRef]
- Massel, S. Extended refraction-diffraction equations for surface waves. Coast. Eng. 1993, 19, 97–126. [Google Scholar] [CrossRef]
- Rey, V. A note on the scattering of obliquely incident surface gravity waves by cylindrical obstacles in waters of finite depth. Eur. J. Mech. B/Fluid 1995, 14, 207–216. [Google Scholar]
- Belibassakis, K.A. A Boundary Element Method for the hydrodynamic analysis of floating bodies in general bathymetry regions. Eng. Anal. Bound. Elem. 2008, 32, 796–810. [Google Scholar] [CrossRef]
- Touboul, J.; Rey, V. Bottom pressure distribution due to wave scattering near a submerged obstacle. J. Fluid Mech. 2012, 702, 444–459. [Google Scholar] [CrossRef]
- Athanassoulis, G.A.; Belibassakis, K.A. A consistent coupled-mode theory for the propagation of small-amplitude water waves over variable bathymetry regions. J. Fluid Mech. 1999, 389, 275–301. [Google Scholar] [CrossRef]
- Belibassakis, K.A.; Athanassoulis, G.A.; Gerostathis, T. A coupled-mode system for the refraction-diffraction of linear waves over steep three dimensional topography. Appl. Ocean. Res. 2001, 23, 319–336. [Google Scholar] [CrossRef]
- Magne, R.; Belibassakis, K.A.; Herbers, T.; Ardhuin, F.; O’Reilly, W.C.; Rey, V. Evolution of surface gravity waves over a submarine canyon. J. Geogr. Res. 2007, 112, C01002. [Google Scholar] [CrossRef]
- Gerostathis, T.; Belibassakis, K.A.; Athanassoulis, G.A. A coupled-mode model for the transformation of wave spectrum over steep 3D topography: Parallel-Architecture Implementation. J. Offshore Mech. Arct. Eng. 2008, 130. [Google Scholar] [CrossRef]
- Belibassakis, K.A.; Athanassoulis, G.A. A coupled-mode system with application to nonlinear water waves propagating in finite water depth and in variable bathymetry regions. Coast. Eng. 2011, 58, 337–350. [Google Scholar] [CrossRef]
- Belibassakis, K.A.; Athanassoulis, G.A.; Gerostathis, T. Directional wave spectrum transformation in the presence of strong depth and current inhomogeneities by means of coupled-mode model. Ocean Eng. 2014, 87, 84–96. [Google Scholar] [CrossRef]
- Vincent, C.L.; Briggs, M.J. Refraction–diffraction of irregular waves over a mound. J. Waterw. Port Coast. Ocean Eng. 1989, 115, 269–284. [Google Scholar] [CrossRef]
- Booij, N.; Ris, R.C.; Holthuijsen, L.H. A third-generation wave model for coastal regions, 1. Model description and validation. J. Geophys. Res. 1999, 104, 7649–7666. [Google Scholar] [CrossRef]
- Ris, R.C.; Holthuijsen, L.H.; Booij, N. A Third-Generation Wave Model for Coastal Regions. Verification. J. Geophys. Res. 1999, 104, 7667–7681. [Google Scholar] [CrossRef]
- Belibassakis, K.A.; Athanassoulis, G.A. Three-dimensional Green’s function of harmonic water-waves over a bottom topography with different depths at infinity. J. Fluid Mech. 2004, 510, 267–302. [Google Scholar] [CrossRef]
- Massel, S.R. Ocean Surface Waves. Their Physics and Prediction; World Scientific: Singapore, 2013. [Google Scholar]
- Chamberlain, P.G.; Porter, D. The modified mild-slope equation. J. Fluid Mech. 1995, 291, 393–407. [Google Scholar] [CrossRef]
- Beer, G.; Smith, I.; Duenser, C. The Boundary Element Method with Programming for Engineers and Scientists; Springer: New York, NY, USA, 2008; ISBN 978-3-211-71576-5. [Google Scholar]
- Teng, B.; Gou, Y. BEM for wave interaction with structures and low storage accelerated methods for large scale computation. J. Hydrodyn. 2017, 29, 748–762. [Google Scholar] [CrossRef]
- Sclavounos, P.; Borgen, H. Seakeeping analysis of a high- speed monohull with a motion control bow hydrofoil. J. Ship Res. 2004, 48, 77–117. [Google Scholar]
- Berenger, J.P. A perfectly matched layer for the absorption of electromagnetic waves. J. Comput. Phys. 1994, 114, 185–200. [Google Scholar] [CrossRef]
- Turkel, E.; Yefet, A. Absorbing PML boundary layers for wave-like equations. Appl. Numer. Math. 1998, 27, 533–557. [Google Scholar] [CrossRef]
- Sabuncu, T.; Calisal, S. Hydrodynamic coefficients for vertical circular cylinders at finite depth. Ocean Eng. 1981, 8, 25–63. [Google Scholar] [CrossRef] [Green Version]
- Falcão, A.F. Wave energy utilization. A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Filippas, E.S.; Belibassakis, K.A. Hydrodynamic analysis of flapping-foil thrusters operating beneath the free surface and in waves. Eng. Anal. Bound. Elem. 2014, 41, 47–59. [Google Scholar] [CrossRef]
- Drew, B.; Plummer, A.R.; Sahinkaya, M.N. A review of wave energy converter technology. Proc. Inst. Mech. Eng. Part A J. Power Energy 2009, 223, 887–902. [Google Scholar] [CrossRef] [Green Version]
- Faizal, M.; Ahmed, M.R.; Lee, Y. A Design Outline for Floating Point Absorber Wave Energy Converters. Adv. Mech. Eng. 2014, 6. [Google Scholar] [CrossRef]
- Rusu, E.; Onea, F. A review of the technologies for wave energy extraction. Clean. Energy 2018, 2. [Google Scholar] [CrossRef]
- Ruehl, K.; Porter, A.; Chartrand, C.; Smith, H.; Chang, G.; Roberts, J. “Development, Verification and Application of the SNL-SWAN Open Source Wave Farm Code”. In Proceedings of the 11th European Wave and Tidal Energy Conference EWTEC, Nantes, France, 6–11 September 2015. [Google Scholar]
- Athanassoulis, G.A.; Belibassakis, K.A.; Gerostathis, T. The POSEIDON nearshore wave model and its application to the prediction of the wave conditions in the nearshore/coastal region of the Greek Seas. Glob. Atmos. Ocean Syst. (GAOS) 2002, 8, 101–117. [Google Scholar] [CrossRef]
- Rusu, E.; Guedes Soares, C. Modeling waves in open coastal areas and harbors with phase resolving and phase averaged models. J. Coast. Res. 2013, 29, 1309–1325. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ω < 2 | = 1 | = 2 | Ν/λ = 15 | n = 5 |
| 2 ≤ ω < 7 | = 1 | = 3 | Ν/λ = 20 | n = 3 |
| 7 ≤ ω < 8 | = 1 | = 3 | Ν/λ = 15 | n = 3 |
| 8 ≤ ω ≤ 9 | = 1 | = 3 | Ν/λ = 10 | n = 3 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Belibassakis, K.; Bonovas, M.; Rusu, E. A Novel Method for Estimating Wave Energy Converter Performance in Variable Bathymetry Regions and Applications. Energies 2018, 11, 2092. https://doi.org/10.3390/en11082092
Belibassakis K, Bonovas M, Rusu E. A Novel Method for Estimating Wave Energy Converter Performance in Variable Bathymetry Regions and Applications. Energies. 2018; 11(8):2092. https://doi.org/10.3390/en11082092
Chicago/Turabian StyleBelibassakis, Kostas, Markos Bonovas, and Eugen Rusu. 2018. "A Novel Method for Estimating Wave Energy Converter Performance in Variable Bathymetry Regions and Applications" Energies 11, no. 8: 2092. https://doi.org/10.3390/en11082092
APA StyleBelibassakis, K., Bonovas, M., & Rusu, E. (2018). A Novel Method for Estimating Wave Energy Converter Performance in Variable Bathymetry Regions and Applications. Energies, 11(8), 2092. https://doi.org/10.3390/en11082092