1. Introduction
The continuous growing of Photovoltaic (PV) systems in the last years has consolidated PV technology as one of the most important renewable energy sources. Only in 2017 approximately
were installed, i.e., 29% more with respect to 2016, reaching a global installed PV capacity of
, approximately [
1].
Most of the PV installed capacity corresponds to grid-connected PV systems (GCPVS) aimed at supplying electricity demand in different applications. In general, a GCPVS is composed by a PV generator, one or more DC/DC power converters, an inverter and a control system [
2]. The PV generator transforms the sunlight into electric power, which depend on the environmental conditions (irradiance and temperature) and the operation point. The DC/DC converters allows the modification of the PV generator operation point and the DC/AC converter delivers the electrical power to the grid. The control system can be divided into two main parts: maximum power point tracking (MPPT) and inverter control. On the one hand, the MPPT uses the DC/DC power converters to find and track the PV generator operation point where it delivers the maximum power (MPP). On the other hand, the inverter control has two main tasks, the first one is to synchronize the AC voltage with the grid, and the second one is to inject the AC current to the grid, which is proportional to the power delivered by the PV generator and the DC/DC converters [
3,
4].
The inverter control is particularly important in a GCPVS because the stability and the power quality injected to the grid depend on it [
2,
3,
4]. For this controller, the PV generator, the DC/DC converters and the MPPT are represented by a voltage [
2] or a current [
3,
4] source, which feeds a link capacitor to form a DC bus. The DC voltage is converted to AC with a set of switches, and a filter eliminates the high frequency components [
2]. The voltage-source two-level inverters with L, LC or LCL filters are widely used in commercially available inverters [
2,
5] and the inverter controller is usually a cascaded control where inner loop regulates voltage and the outer loop controls the current injected to the grid and keeps the DC bus voltage around its reference value [
2]. Nonetheless, other authors propose cascaded controller where the inner loop regulates the current injected to the grid [
3,
4,
6,
7] and the current references are generated from a Droop controller [
7], active and reactive power references [
6] or form the maximum power provided by the PV source and the reactive power demanded by the load [
3,
4]. Moreover, some papers propose linear current controllers [
6], while other papers combine linear regulators with state feedback [
3,
7] or Lyapunov-based [
4] controllers to regulate the current injected to the grid.
Notwithstanding the important role of the inverter controller in a GCPVS, the maximum power delivered by the PV generator does not depend on this controller, since the MPPT is in charge of finding and tracking the MPP of the PV generator for different irradiance and temperature conditions. When all the the PV panels in a generator are operating under the same irradiance and temperature conditions (i.e., homogeneous conditions), there is a single MPP in the power vs. voltage (P-V) curve of the generator. However, GCPVS in urban environments (i.e., homes, buildings, companies, etc.) are surrounded by different objects, which may produce partial shadings over the PV array, which forces the PV panels of the array to operate under different (mismatched) irradiance and temperature conditions. Moreover, mismatching conditions may also be produced by the aging, soiling, early degradation and manufacturing tolerances in the PV panels [
8].
When a PV generator is operating under mismatching conditions, the power produced is significantly reduced [
9,
10]; therefore, it is important to mitigate their effects. In general, it is possible to find three different architectures to mitigate the adverse effects of the mismatching conditions in PV installations: centralized systems (CMPPT), distributed systems (DMPPT), and reconfiguration systems [
11]. However, CMPPT and DMPPT architectures are the most widely used architectures in urban applications; hence they are briefly discussed below.
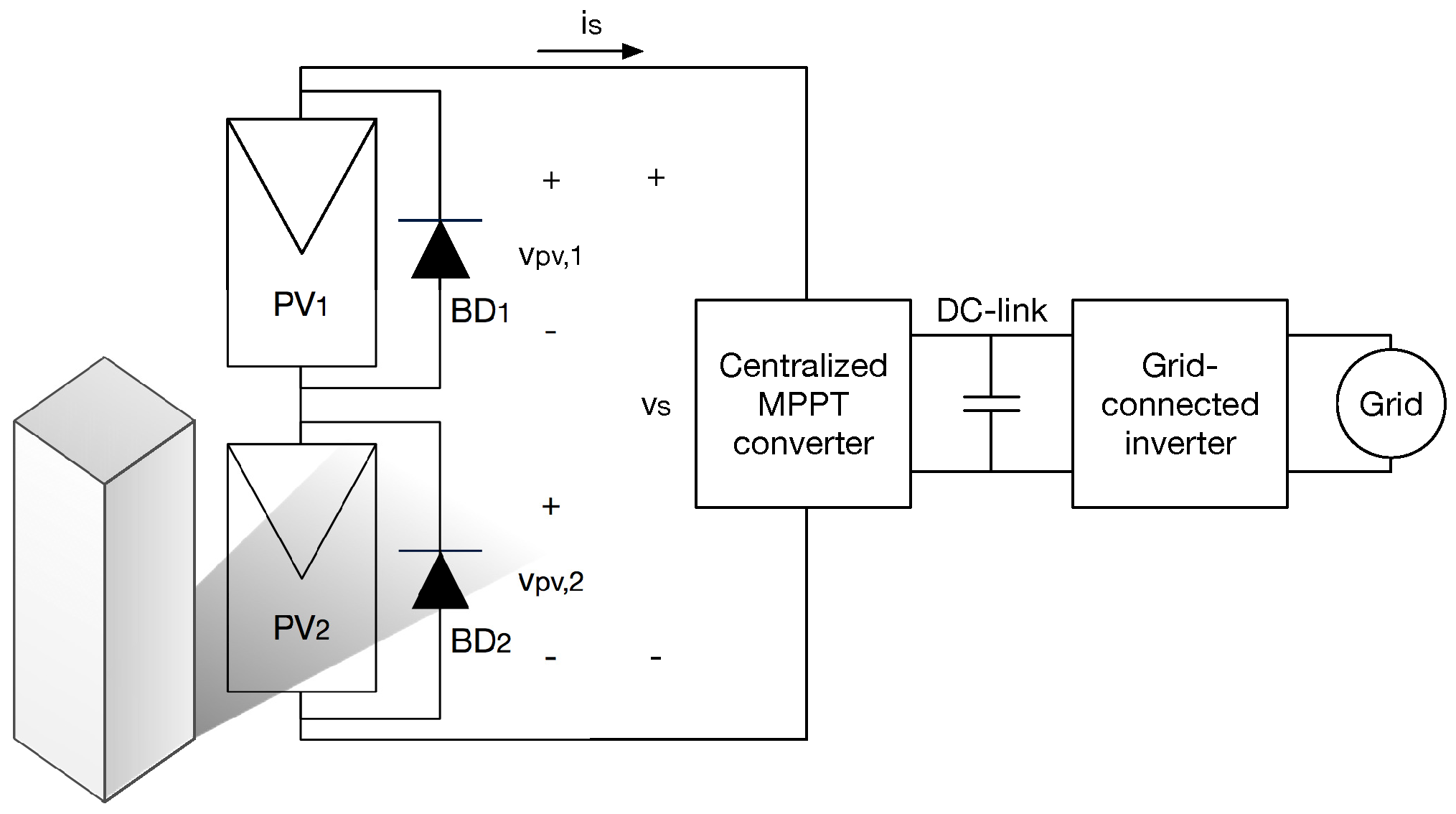
In CMPPT systems, depicted in
Figure 1, the complete PV array is connected to a single DC/DC power converter, whose output is connected to the grid through an inverter. The DC/DC converter modifies the operation voltage of the PV array, in order to track the MPP through the MPPT. Under mismatching conditions, the maximum current (i.e., the short-circuit current) produced by a shaded PV panel is less than the short-circuit current of the unshaded panels; hence, when the array current is greater than the short-circuit current of the shaded panel, the excess of current flows through the bypass diode (BD) connected in antiparallel to the panel (see
Figure 1). As consequence, for a particular shading profile over the PV panels and a particular array current, some BDs are active and the rest are inactive. This activation and deactivation of the bypass diode produce multiple MPPs in the array P-V curve, which means that there are local MPPs and one global MPP (GMPP) [
12].
In general, MPPT techniques for CMPPT architectures are complex [
11,
12] because they should be able to track the global MPP of the PV array in any condition. Moreover, mismatching conditions continuously change along the day and year due to the sun trajectories in the sky, and also due to the changes in the surrounding objects. As consequence, the number of MPPs and the location of the global MPP continuously change in the P-V curve of a PV array. CMPPT techniques can be classified into three main groups [
13]: conventional techniques, soft computing techniques and other techniques. The first group includes techniques based on Perturb & Observe (P&O), incremental conductance and hill climbing, as well as other GMPP search techniques and adaptive MPPTs. Soft computing techniques uses artificial intelligence methods to find the GMPP, like evolutionary algorithm, genetic programming, fuzzy system, among others. The last group includes methods like Fibonacci search, direct search, segmentation search, and others to locate the GMPP.
In DMPPT architectures the PV array is divided into smaller arrays, or sub-arrays, to reduce the number of MPPs in each sub-array. Then, each sub-array is connected to a DC/DC power converter, which has an MPPT technique much more simple than the ones used in CMPPT systems [
11,
14,
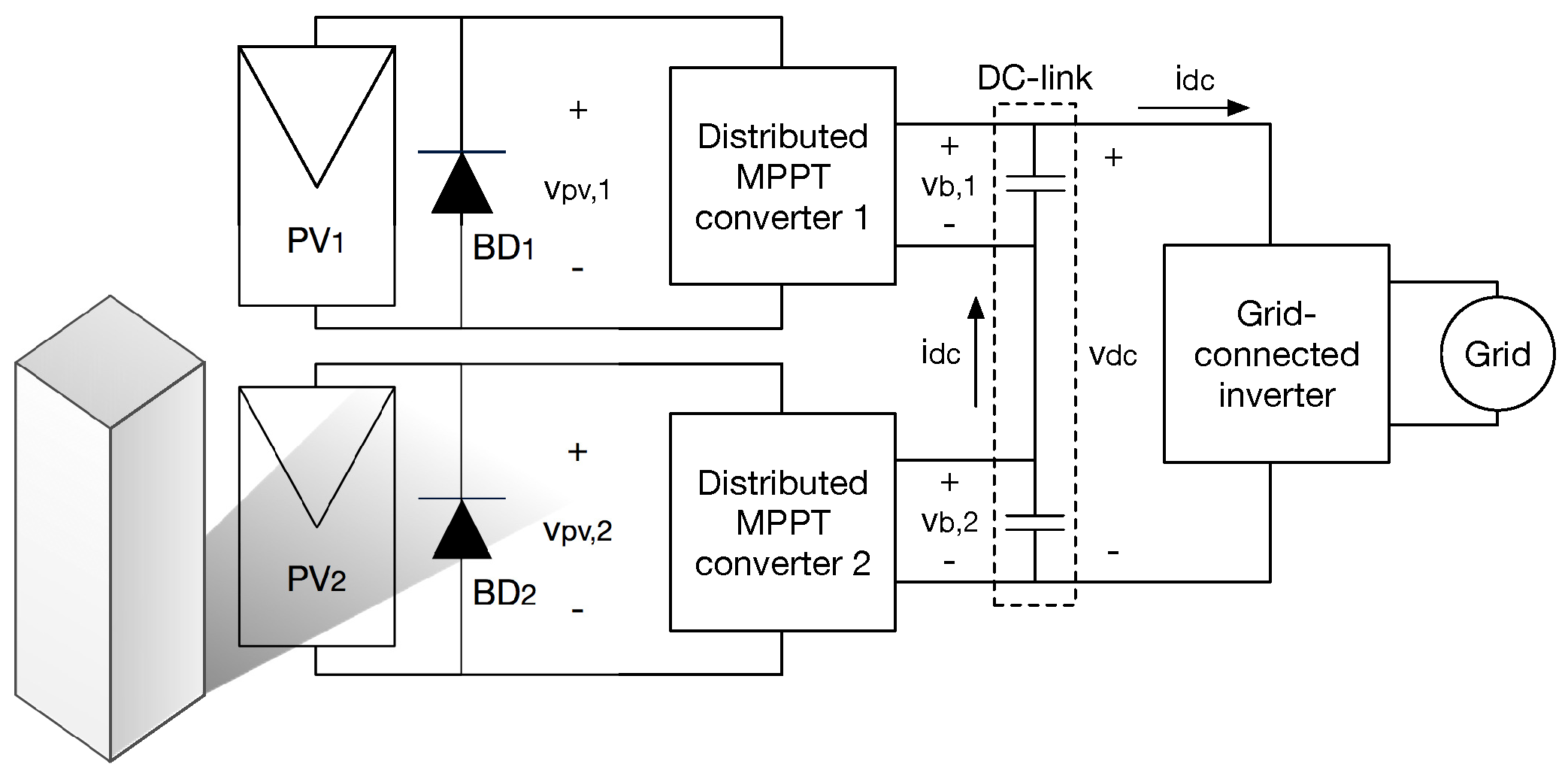
15]. The double stage DMPPT system, presented in
Figure 2, is one of the most widely adopted architectures in literature [
11,
14,
15], where each panel is connected to a DC/DC converter to form a DMPPT unit (DMPPT-U) and all DMPPT-Us are connected in series to feed an inverter. Boost converters are widely used as DC/DC converter in double stage DMPPT system, while other approaches uses buck, buck-boost or more complex converters to improve the voltage gain or the efficiency [
13,
15].
The main advantage of the double stage DMPPT systems is that each PV panel can operate at its MPP even under mismatching conditions [
15]. Moreover, no communication is required among the DMPPT-Us or with the inverter, and the the dynamics of the DMPPT-Us are decoupled from the dynamics of the GCPVS inverter, due to the high capacitance in the DC link that forms the DC bus [
15]. However, one of the main limitations of double stage DMPPT systems is that the output voltage of each DMPPT-U is proportional to its output power; therefore, under mismatching conditions, the output voltage of a DMPPT-U with a highly irradiated PV panel may exceed the maximum voltage of the DMPPT-U output capacitor and the maximum open-circuit voltage of the switching devices. Such a condition is denominated overvoltage and must be avoided to protect the DC/DC converter [
16,
17,
18]. Although overvoltage condition is important to assure a secure operation of the DMPPT-Us, it is not discussed in some papers devoted to analyzing double stage DMPPT systems, like [
19,
20], nor in review papers about MPPTs for PV generators under mismatching conditions [
13,
15,
21,
22].
In general, overvoltage can be faced by two main approaches. The first one is to design the DMPPT-U with an output capacitor and switching devices able to endure voltages that may be close to the DC bus voltage in the link with the inverter [
18]. Nevertheless, this solution increases the size and cost of each DMPPT-U, hence, this effect is multiplied by the number of DMPPT-Us in the PV system. The second approach is to monitor the DMPPT-U output voltage and if it is greater than a reference value, the control objective must be changed to regulate the DMPPT-U output voltage under its maximum value. This operating mode is denominated Protection mode.
Therefore, the DMPPT-U control strategy must consider two basic operation modes: MPPT and Protection. In MPPT mode the control objective is to extract the maximum power from the PV generator, while monitors the output voltage of the DMPPT-U. If such a voltage surpasses a reference value, then MPPT mode is disabled and Protection mode is activated to keep the DMPPT-U output voltage below its maximum value. Although in literature there is a significant number of control systems for double stage DMPPTs, as shown in different review papers [
13,
14,
15], after an exhaustive review the authors have found just a few control systems that consider the overvoltage problem and implement MPPT and Protection modes [
16,
23,
24,
25,
26,
27,
28,
29,
30]. That is why, the literature review in this paper is focused on these references.
In [
23,
24,
25] the authors propose centralized strategies to perform the MPPT and to avoid the condition
on DMPPT-Us implemented with Boost converters, where
and
are the output voltage of the DC/DC converter and its maximum value, respectively. In [
23,
24] the authors propose to monitor
of each DMPPT-U, if there is at least one DMPPT-U with
, then the input voltage of the inverter (
) is reduced. Moreover, when
is reduced below
of its nominal value, the DMPPT-Us with
change their operating mode from MPPT to
regulation. Nevertheless, the authors use linear controllers for
and
, which no not guarantee the DMPPT-U stability in the full operation range. Additionally, the paper does not provide information about the implementation of the
controller and it does not discuss how to perform the transition between MPPT and Protection mode (and viceversa) or the stability issues of those transitions. Finally, the paper does not provide guidelines or a design procedure of the proposed control system.
Another centralized control strategy for a DMPPT system, based on Particle-Swarm Optimization (PSO), is proposed in [
25]. The objective of the control strategy is to find the values of
of each DMPPT-U that maximizes the output power of the whole system. However, the constraints of the PSO algorithm include the condition
for each DMPPT-U. Therefore, the proposed control system is able to track the MPPT in each DMPPT-U avoiding the overvoltage condition. Although the authors provide some considerations to set the PSO parameters, they not explain how regulate the PV panel voltage with the power converters and they do not analyze the stability of the DMPPT-Us. Moreover, the authors do not provide information for the implementation of the proposed control system because they implemented it on a dSpace control board. It is worth noting that the centralized strategies proposed in [
23,
24,
25] require additional hardware to implement the centralized controllers and monitoring systems, hence these solutions require high calculation burden compared with other DMPPT-U control approaches like [
16,
26,
27,
28,
29].
The authors in [
16,
26] consider DMPPT-Us implemented with Boost converters and propose to limit the duty-cycle (
d) of each DMPPT-U to avoid the condition
. The limit of
d is defined as
, where,
is the PV panel voltage [
16,
26]. Nevertheless, the DMPPT-U control operates in open-loop during the saturation of
d, which may lead to the instability of the DMPPT-U controller. Additionally, the papers do not provide a clear explanation about how to define the duty cycle limit, since the voltage
of a DMPPT-U varies with the irradiance and temperature conditions as well as the mismatching profile over the PV panels. Finally, the authors in [
16] focus on the analysis of double stage DMPPT systems implemented with boost converters, but they do not provide a design procedure for the DMPPT-U control in MPPT mode.
In [
27,
28,
29] the authors propose two different control strategies for each DMPPT-U, one for MPPT mode and another for Protection mode, where the trigger for the Protection mode is the condition
. On the one hand, the strategy presented in [
27] for Protection mode is to adopt a P&O strategy, i.e., perturb
and observe
in order to fulfill the condition
. On the other hand, in [
28,
29] two PI-type regulators are proposed for each DMPPT-U: one for
in MPPT mode and another for
in Protection mode. The reference of
and
regulators are
and the MPPT reference, respectively. The voltage regulators presented in [
27,
28,
29] are linear-based, with fixed parameters, and designed with a linearized model in a single operation point of the DMPP-U; therefore, they cannot guarantee a consistent dynamic performance and stability of the DMPPT-U in the entire operation range. Moreover, the authors in [
27,
28,
29] do not provide a design procedure of the proposed controllers and only [
28] provide relevant information for the controller implementation.
A Sliding-Mode Controller (SMC) designed to regulate
and
on a Boost-based DMPPT-U is proposed in [
30]. The sliding surface (
) has three terms:
, where
is the inductor current of the Boost converter,
is the
reference provided by the MPPT algorithm,
is a binary value assuming
when
and
when
, and the constants
and
are SMC parameters. During MPPT mode the first and second terms of
are active to regulate
according to the MPPT algorithm; while during Protection mode the first and third terms of
are active to regulate
. The main advantage of the SMC proposed in [
30] is the capability to guarantee the global stability of the DMPPT-U in the entire operation range. Nonetheless, that paper does not analyze the dynamic restrictions of the SMC reference in MPPT to guarantee the DMPPT-U stability; additionally, the paper does not provide a design procedure for the SMC parameters (
and
) and the sliding surface does not include integral terms, which introduces steady-state error in the regulation of
and
. Finally, the authors do not provide information for the real implementation and the proposed control system is validated by simulation results only.
This paper introduces a control strategy with MPPT and Protection modes for DMPPT-Us implemented with boos converters, where the regulation of
, in MPPT mode, and
, in Protection mode, is performed by a single SMC. In MPPT mode
reference is provided by a P&O algorithm and
is monitored to verify if its value is less than a safe limit named
. If
, Protection mode is activated and
is regulated to
by the SMC. During Protection mode
is monitored to verify the condition
, if so, MPPT mode is activated. The proposed SMC has the same structure of the SMC introduced in [
30] to adapt the SMC switching function with the operation mode. However, the proposed SMC introduces two integral terms to guarantee null steady-state error in the regulation of
and
; moreover, the paper analyzes the dynamic restrictions in the P&O references to ensure the stability of the DMPPT-U in the entire operation range. The design procedure of the proposed SMC parameters is analyzed in detail as well as its implementation using embedded systems and analog circuits.
There are three main contributions of this paper. The first one is a single SMC that guarantees global stability and null steady-state error of the DMPPT-Us in the entire operation range of MPPT and Protection modes. The second contribution is a detailed design procedure of the proposed SMC parameters and the definition of the dynamic limits of P&O references that guarantee the global stability. Finally, the last contribution is the detailed description of the SMC implementation that helps the reader to reproduce the results.
The rest of the paper is organized as follows:
Section 2 explains the effects of the mismatching conditions on a DMPPT system;
Section 3 introduces the model of the DMPPT-U and the structure of the proposed SMC.
Section 4 and
Section 5 provide the analysis and parameters design of the proposed SMC in both MPPT and Protection modes. Then,
Section 6 describes the implementation of the proposed SMC, and
Section 7 and
Section 8 present both the simulation and experimental results, respectively. Finally, the conclusions given in
Section 9 close the paper.
2. Mismatched Conditions and DMPPT
In a CMPPT system operating under mismatching conditions, there are some panels subjected to a reduced irradiance due to, for example, the shadows produced by surrounding objects (see
Figure 1); hence, the maximum current (short-circuit current) of those panels is lower than the short-circuit current of the non-shaded panels. Moreover, when the string current is lower than the short-circuit current of the shaded PV panel, the protection diode connected in antiparallel, i.e., bypass diode (BD), is reverse biased (inactive) and both panels contribute to the string voltage. However, when the string current is higher than the short-circuit current of the shaded panel, the BD of such panel is forward biased (active) to allow the flow of the difference between the string current and the short-circuit current of the shaded panel.
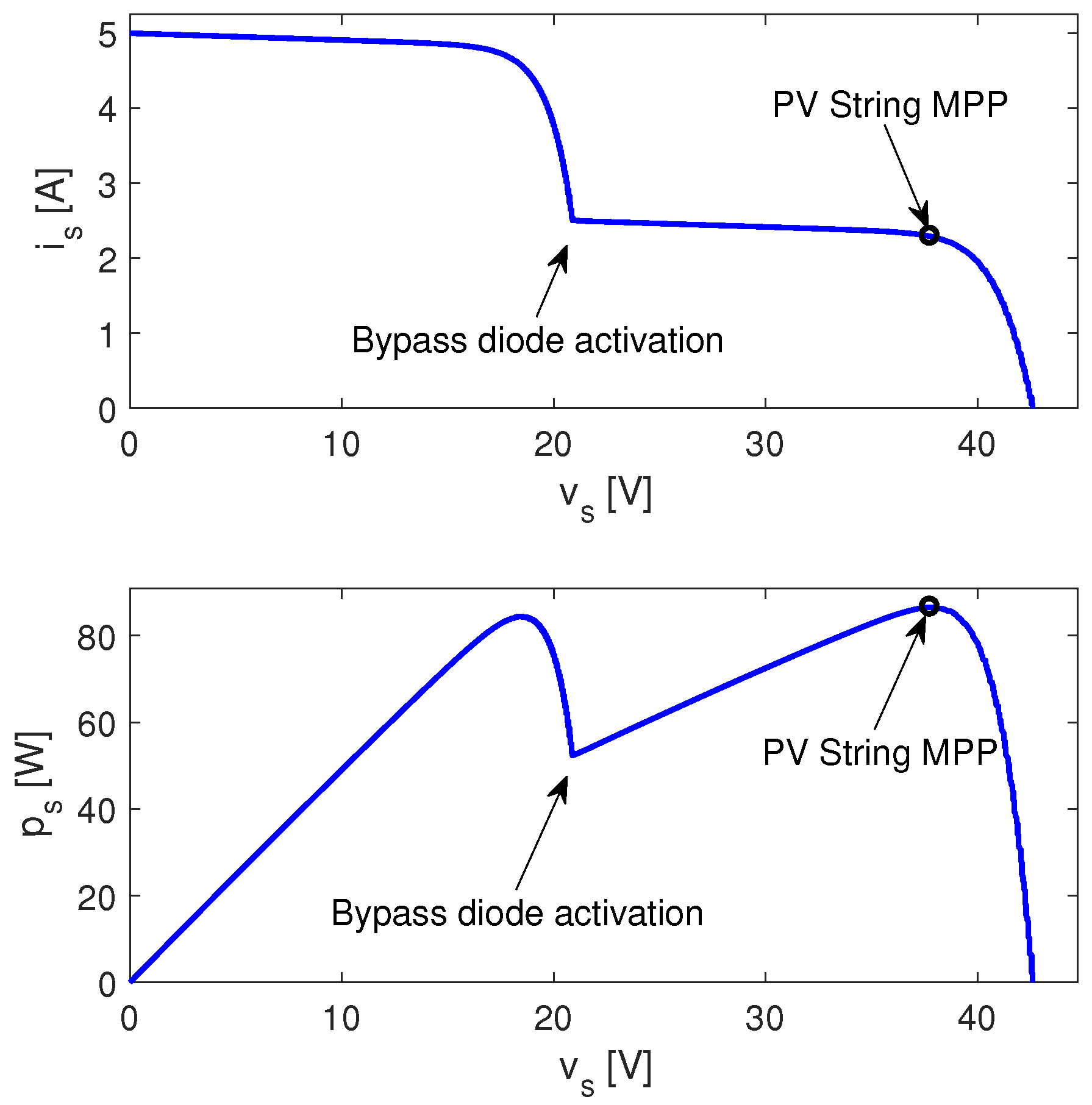
The Current vs. Voltage (I-V) and P-V curves of a PV array, composed by two PV panels, is simulated to illustrate the mismatching effects on the CMPPT system presented in
Figure 1. For the simulation, the non-shaded (
) and shaded (
) panels irradiances are
and
, respectively. The panels are represented by using the single-diode model expression given in Equation (
1) [
31], where
and
are the current and voltage of the panel,
is the photovoltaic current,
A is the inverse saturation current,
is the series resistance and
is the parallel resistance.
B is defined as
where
is the number of cells in the panel,
is the ideality factor,
k is the Boltzmann constant,
q is the electron charge, and
T is panel temperature in
K. The parameters used for the simulations are calculated using the equations presented in [
32]:
,
,
and
.
The BD activation of the shaded PV panel in
Figure 1 produces an inflection point in the I-V curve, which in turns produces two MPPs in the P-V curve as it is shown in
Figure 3. Therefore, the maximum power produced by the CMPPT system (
) is less than
, which is the sum of the maximum power that can be produced by both
(
) and
(
).
In a double stage DMPPT system, each panel is connected to a DC/DC converter to form a DMPPT unit (DMPPT-U), and the converters’ outputs are connected in series to obtain the input voltage of an inverter, as reported in
Figure 2. The boost converter is a widely used topology to implement the DMMPT-Us [
11,
14,
16,
23,
24,
25,
26,
27,
29,
30], since it is necessary to step-up the PV panel voltage to match the inverter input voltage. Moreover, the boost structure is simple and the stress voltages of both output capacitor and switch are smaller in comparison with other step-up topologies [
33]. Furthermore, the series connection of the DMPPT-U outputs impose low boosting factors to the boost converters, which enables those topologies to operate in a high efficiency condition.
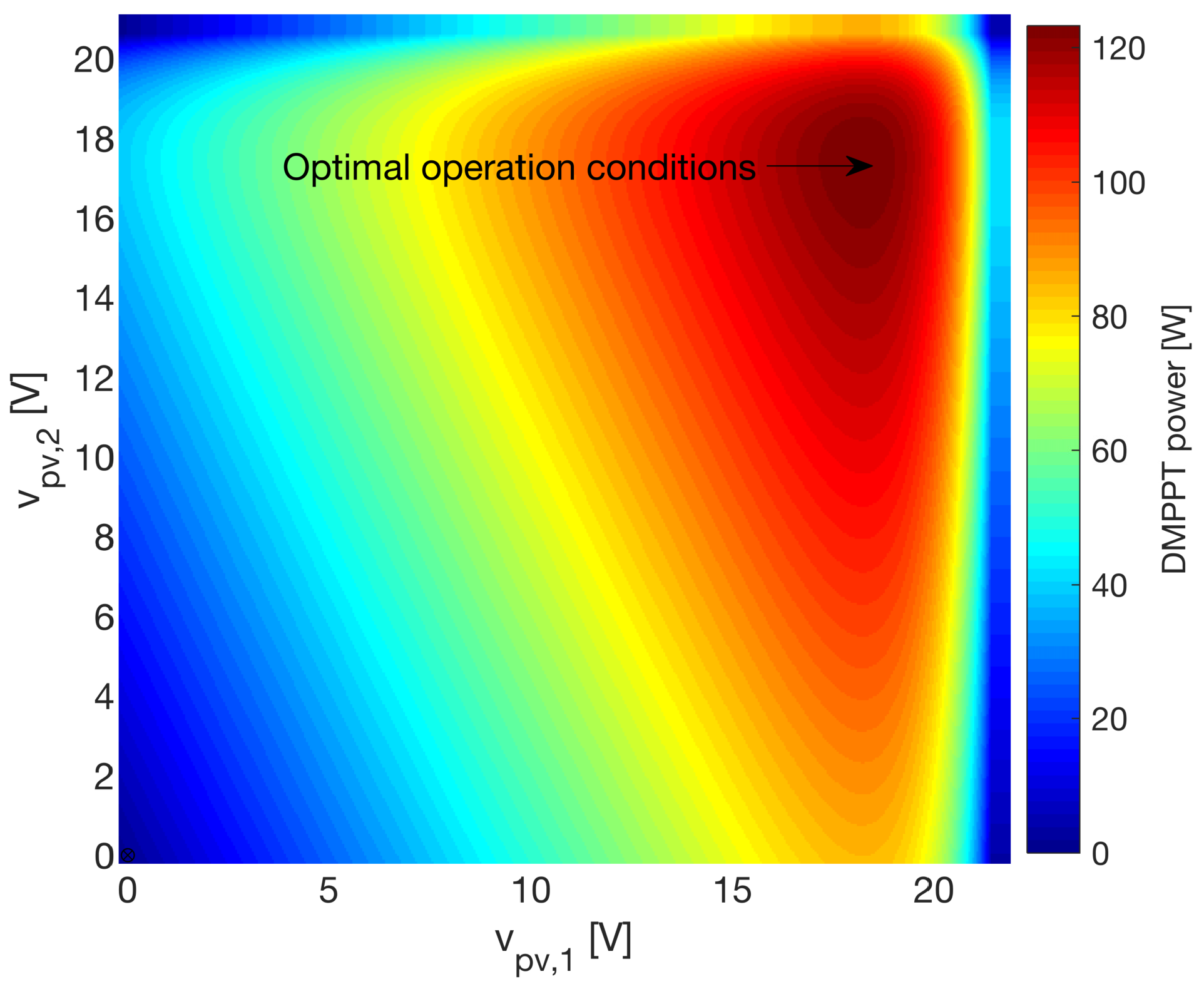
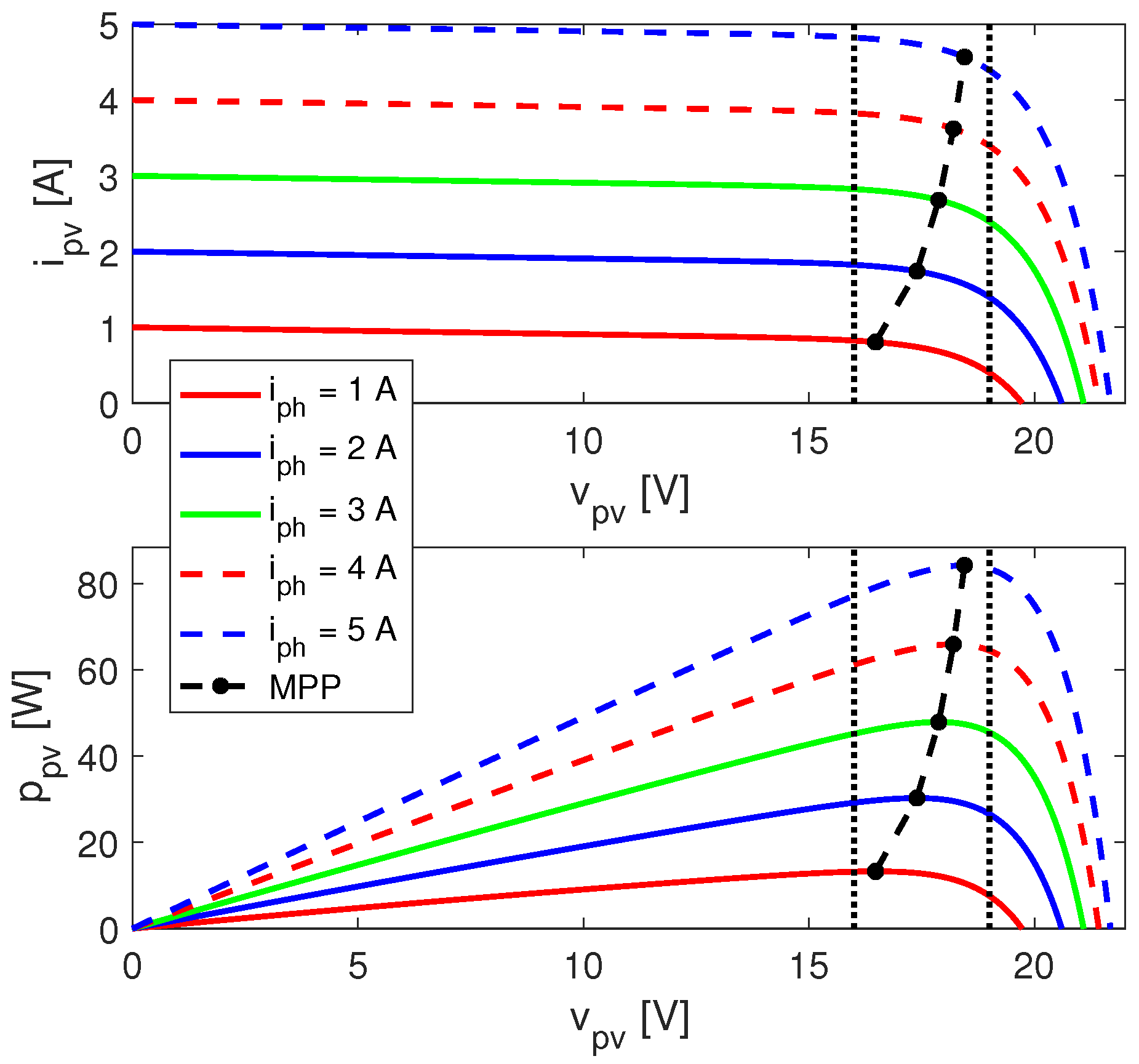
To illustrate the theoretical power extraction provided by a double stage DMPPT solution, the system of
Figure 2 is simulated considering the same mismatching conditions adopted for the CMPPT solution:
and
. The simulation results are presented in
Figure 4. In this case, both PV panels are able to operate at any voltage, hence the maximum power achievable in each panel is extracted. Therefore, the theoretical optimal operation conditions
correspond to the MPP conditions in each panel as reported in
Figure 4, in which
has a maximum power of
and
has a maximum power of
, hence the maximum power provided by the DMMPT system is
; this is considering loss-less converters.
However, from
Figure 2 it is observed that the DC-link is formed by the output capacitors of the DMPPT converters, which are connected in series. Therefore, the DC-link voltage
is equal to the sum of the output capacitors voltages
and
. For a general system, with
N DMPPT converters associated to
N PV panels, such a voltage condition is expressed in Equation (
2):
Moreover, the series connection of the output capacitors imposes the same current at the output of the DMPPT converters. Therefore, the power delivered to the DC-link
, which is transferred to the grid-connected inverter, is equal to the sum of the power delivered by each converter,
and
. In the general system formed by
N converters, the following expression holds:
Finally, the voltage imposed to the
i-th output capacitor is obtained from Equations (
2) and (
3) as follows:
That expression put into evidence that the voltage imposed to any of the output capacitors depends on the power delivered by all the DMPPT converters. Moreover, grid-connected inverters, like the one described in
Figure 2, regulate the DC-link voltage at its input terminals to ensure a correct and safe operation [
34]. In light of the previous operation conditions, Equations (
2) and (
4) reveal that the DC-link voltage
, imposed by the inverter, is distributed into the output capacitor voltages
proportionally to the power delivered by the associated PV panel
with respect to the total power delivered by all the PV sources. Hence, the converter providing the higher power will exhibit the higher output voltage, which could lead to over-voltage conditions.
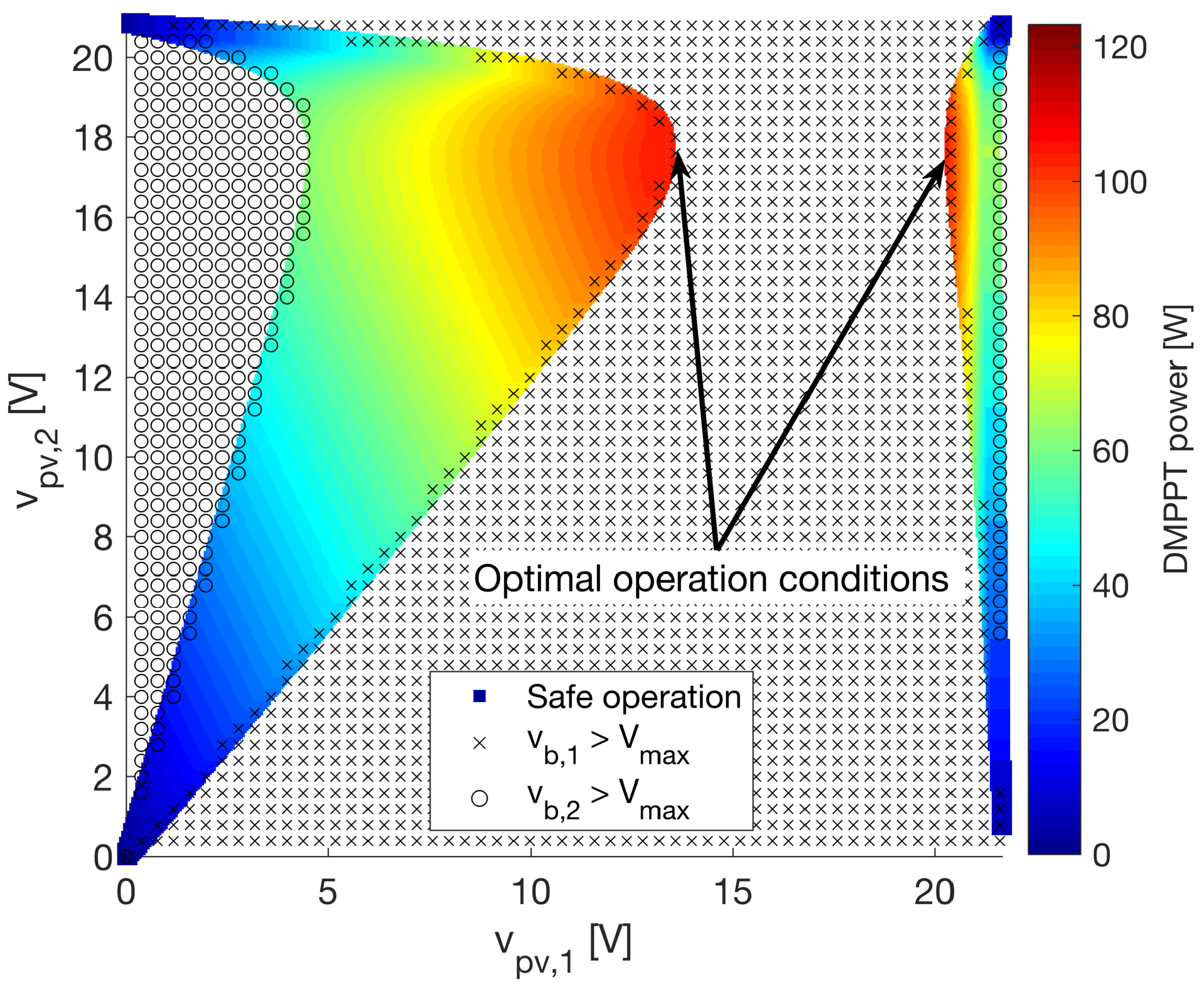
Considering the DMPPT system of
Figure 2 with a DC-link voltage imposed by the inverter equal to
, and output capacitors with maximum voltage rating equal to
, the DMPPT system operates safely if both PV panels produce the same power since
. However, in the mismatched conditions considered (
and
), the DMPPT system is subjected to overvoltage conditions as it is reported in
Figure 5: at the theoretical optimal operation conditions
the output voltage of the first converter is
, which is higher than the rating voltage
producing an overvoltage condition that could damage the converter.
Figure 5 shows the conditions for safe operation, overvoltage in the first converter (
) and overvoltage in the second converter (
).
The simulation puts into evidence that new optimal operation condition appear due to the overvoltage conditions. In this example, the first optimal operation points of the PV panels are
(MPP voltage) and
(no MPP voltage), while the second optimal operation point is
(MPP voltage) and
(no MPP voltage). This result is analyzed as follows: the first PV panel must be driven far enough from the MPP condition so that the power provided to the DC-link by the associated converter is, at most,
of the total power. That percentage is calculated from Equation (
4) replacing the output voltage by the rating voltage
and using the values of the DC-link voltage
and the total power delivered to the DC-link as follows:
Equation (
5) shows that, in the cases when the theoretical optimal operation conditions are out of the safe voltages, the new optimal operation voltages are located at the frontier of the safe conditions, which ensures the maximum power extraction from the PV panel associated to the converter near the overvoltage condition. This analysis is confirmed by the simulation results presented in
Figure 5.
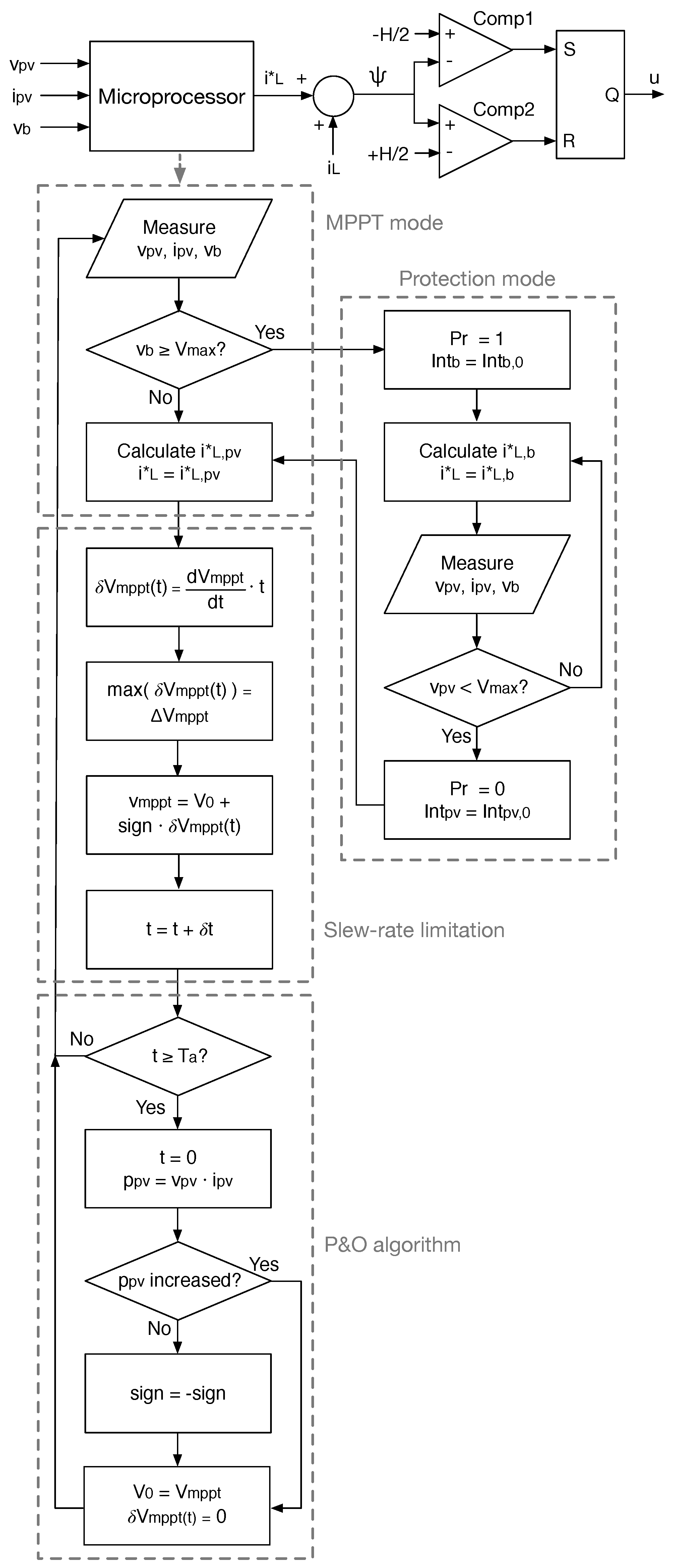
Therefore, to ensure the maximum power extraction for any irradiance and mismatching profile, the DMPPT converters must be operated in two different modes:
MPPT mode: when the output capacitor voltage is under the safe (rating) limit, the converter must be controlled to track the MPP condition.
Protection mode: when the output capacitor voltage reaches the safe limit, the converter must be controlled to set at the maximum safe value .
The following sections propose a control system, based on the sliding-mode theory, to impose the previous behavior to the DMPPT converters.
3. Converter Model and Structure of the Control System
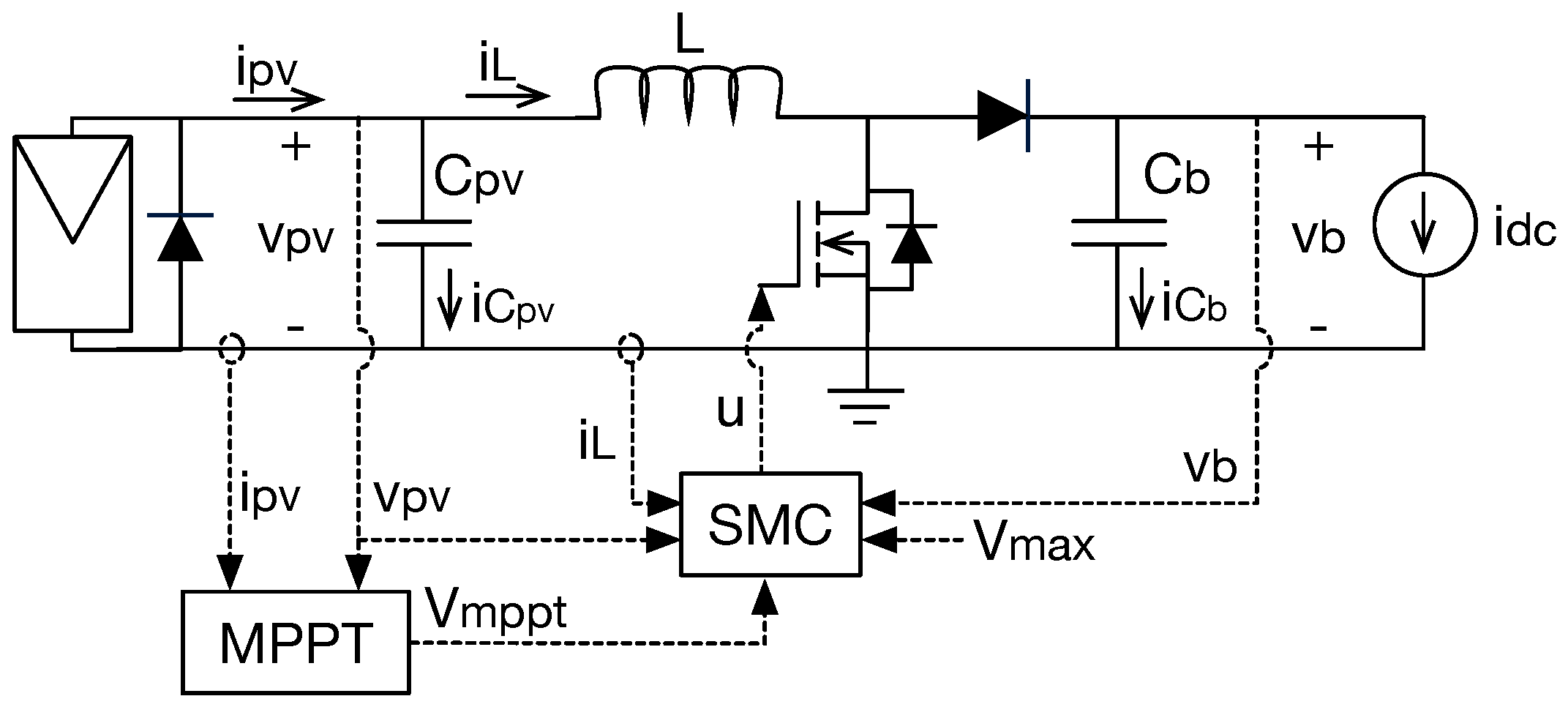
As discussed before, boost converters are widely used in DMPPT systems; hence, this paper considers a DMPPT-U system implemented with a boost converter. The electrical model of the adopted DMPPT converter is presented in
Figure 6, which includes the MPPT algorithm that provides the reference for the SMC. Moreover, a current source is used to model the current
imposed by the inverter to regulate the DC-link voltage.
The differential equations describing the dynamic behavior of the DMMPT converter are given in Equations (
6)–(
8), in which
u represents the binary signal that defines the MOSFET and diode states:
for MOSFET on and diode off;
for MOSFET off and diode on.
Sliding-mode controllers are widely used to regulate DC/DC converters because they provide stability and satisfactory dynamic performance in the entire current and voltage operation ranges [
35,
36]. Furthermore, SMCs also provide robustness against parametric and non-parametric uncertainties [
37]. In particular, in PV systems implemented with boost converters, SMCs have been adopted to improve the dynamic performance of the DC/DC converter in CMPPT systems [
37,
38] and to regulate the input and output voltages of a DMPPT-U operating in both MPPT and Protection modes [
30]. Therefore, this paper adopts that type of controllers.
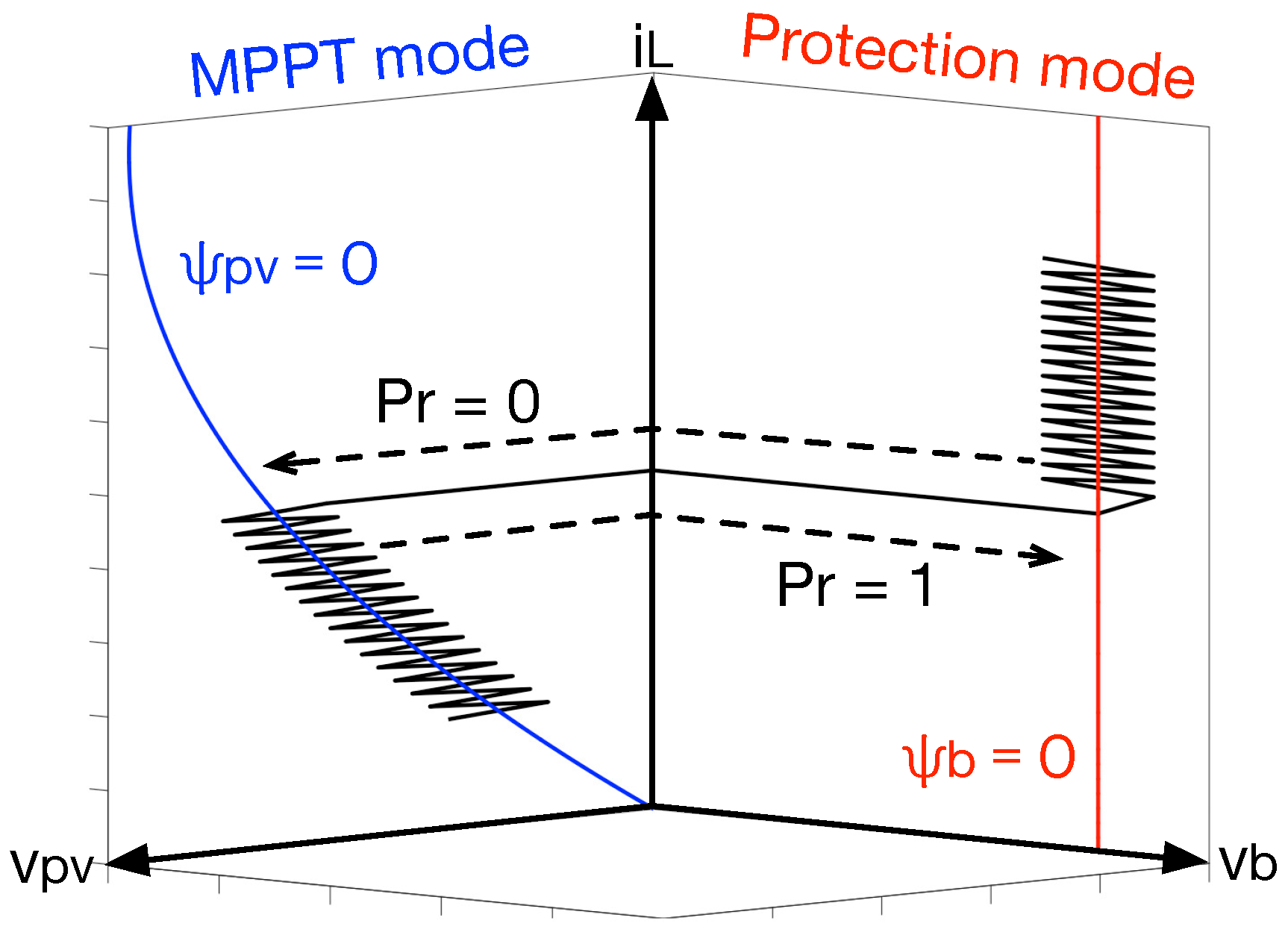
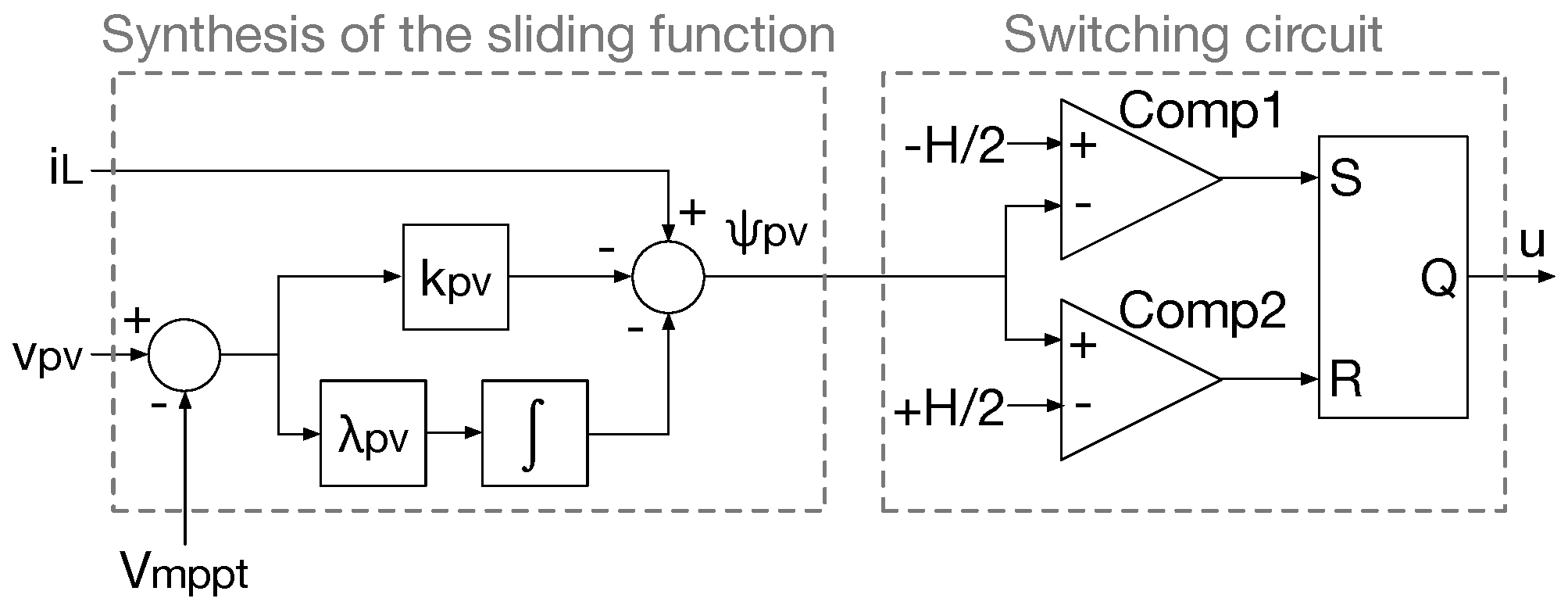
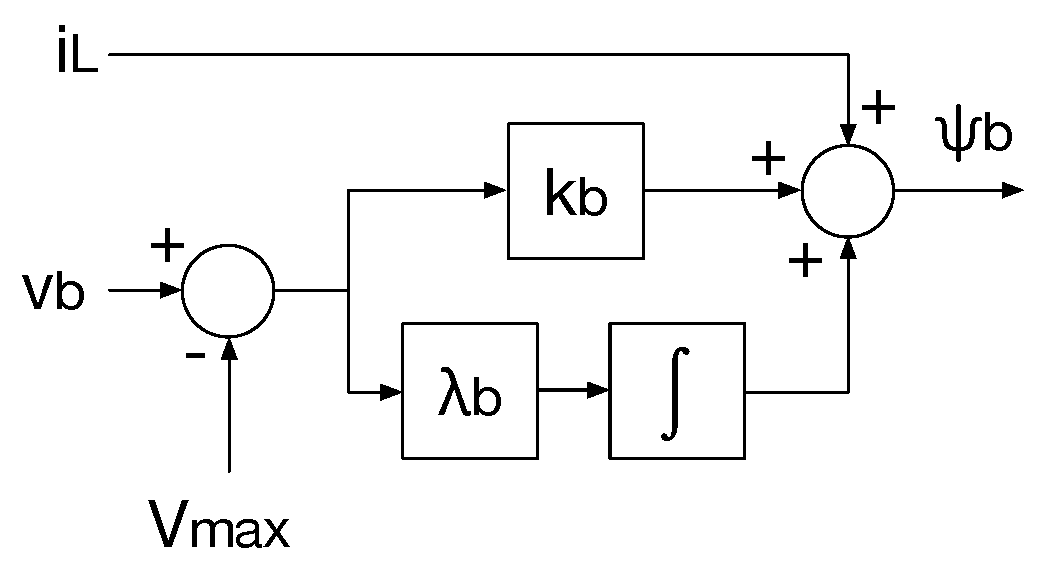
The proposed control system uses one switching function for each operation mode:
for MPPT mode and
for protection mode, which leads to the unified sliding surface (
) given in Equation (
9). Therefore, the system operating at
is in the sliding-mode with null error, while
corresponds to a system operating far from the reference, hence with an error. The surface includes a binary parameter
to switch between the two operation modes, depending on the voltage value
exhibited by the output capacitor, as it is reported in expression (
10).
The switching functions
and
, designed for each mode, are given in Equations (
11) and (
12), respectively, in which
,
,
and
are parameters,
corresponds to the inductor current of the boost converter,
corresponds to the voltage at the PV panel terminals,
corresponds to the reference provided by the MPPT algorithm,
corresponds to the output voltage of the DMPPT converter and
is the maximum safe voltage at the converter output terminals.
Both switching functions were designed to share the inductor current, so that the transition between such sliding-mode controllers is not abrupt since the inductor current keeps the same value when
changes the active sliding function.
Figure 7 illustrates the concept of the two operation modes in the proposed control system.
The following section analyzes the stability conditions of the proposed SMC, the equivalent dynamics of the closed loop system, the SMC parameters design, and the implementation of the proposed control system, in both MPPT () and Protection () modes.
7. Simulation Results
The DMPPT system formed by two DMPPT converters connected in series, previously presented in
Figure 2, was implemented in the power electronics simulator PSIM to validate the previous analyses. Each DMPPT converter drives a BP585 PV panel with the same circuital implementation presented in
Figure 6. The SMC in each DMPPT converter corresponds to the hybrid analog-digital implementation described in
Figure 18. Finally, the BP585, boost converter and controller parameters were the same ones defined in the previous sections of the paper:
,
and
for the boost converters,
,
,
and
for the BP585 panels and
,
,
,
,
,
,
,
, and
for the controller.
The simulation starts considering the two PV panels operating at
, i.e., in uniform conditions, which forces the output voltages of the DMPPT converters to be equal to
.
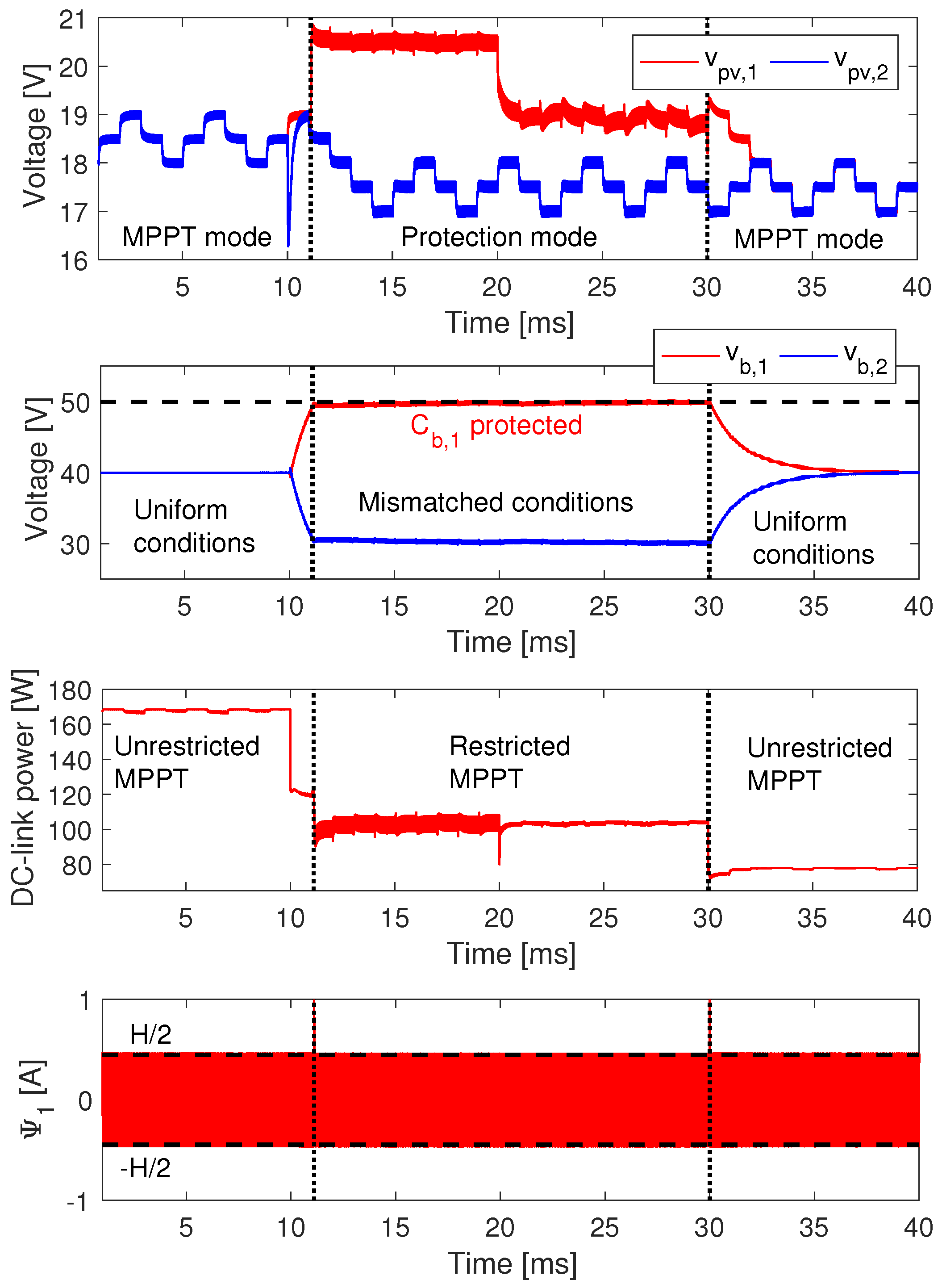
Figure 19 presents the simulation results, which depicts the operation in MPPT mode of both converters. Then, at
the irradiance of the second panel drops to
, producing a mismatched condition that forces the output voltage of the first DMPPT converter to grow. After
reaches the maximum safe voltage
, which triggers the Protection mode. From that moment the PV voltage
of the first panel diverges from the MPP value to reduce the power production, so that the output voltage is limited.
At the irradiance of the first PV panel drops to , which requires the system to remain in Protection mode to avoid an overvoltage in . Finally, at the irradiance of the first panel drops to , leaving both panels in uniform conditions. Hence, s latter, the system enters in MPPT mode to start again the tracking of the MPP under safe conditions. The simulation also puts into evidence that the SMC is always stable: the switching function , corresponding to the DMPPT converter entering in both MPPT and Protection modes, operates inside the hysteresis band in both modes under the presence of perturbations in the irradiance, output voltage and P&O reference. However, at the instants in which the modes transition occur ( and ) the SMC leaves the hysteresis band, but the fulfillment of the reachability conditions forces the SMC to enter again in the band.
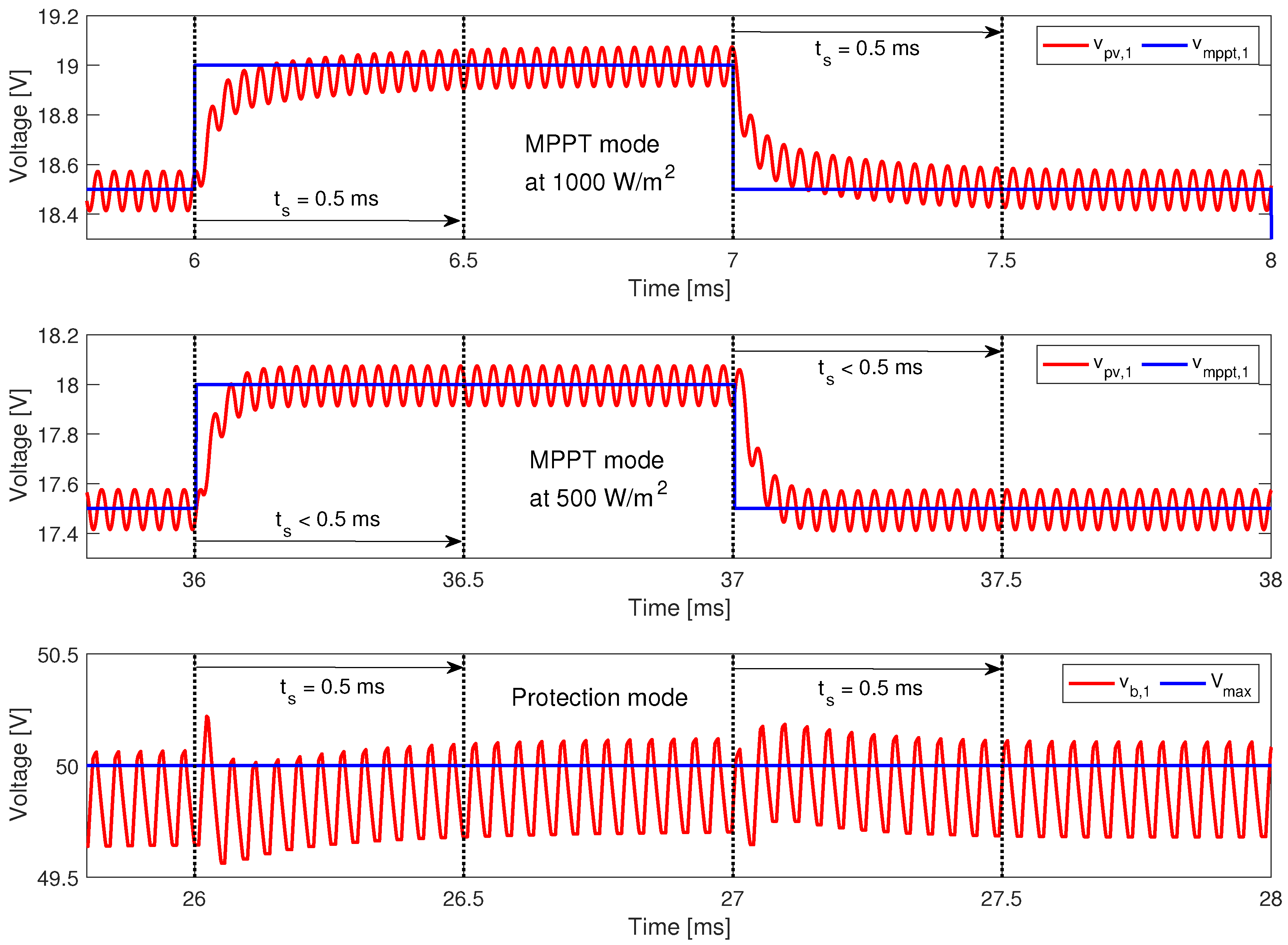
Figure 20 shows a zoom of the circuital simulation to verify the design requirements. The figure at the top shows the waveforms of the PV voltage and P&O reference for the first DMPPT-U operating in MPPT mode, which occurs between 6 ms and 8 ms. During that time the PV panel of the first DMPPT-U operates under an irradiance equal to 1000 W/m
2, and the SMC successfully fulfills the desired settling time
ms. Similarly, the overshoot is under the 10%. The figure at the middle also shows the waveforms of the PV voltage and P&O reference for the first DMPPT-U operating in MPPT mode, but this time under at irradiance equal to 500 W/m
2, which occurs between 36 ms and 38 ms. Again, the SMC successfully fulfills the desired settling time
ms and overshoot (
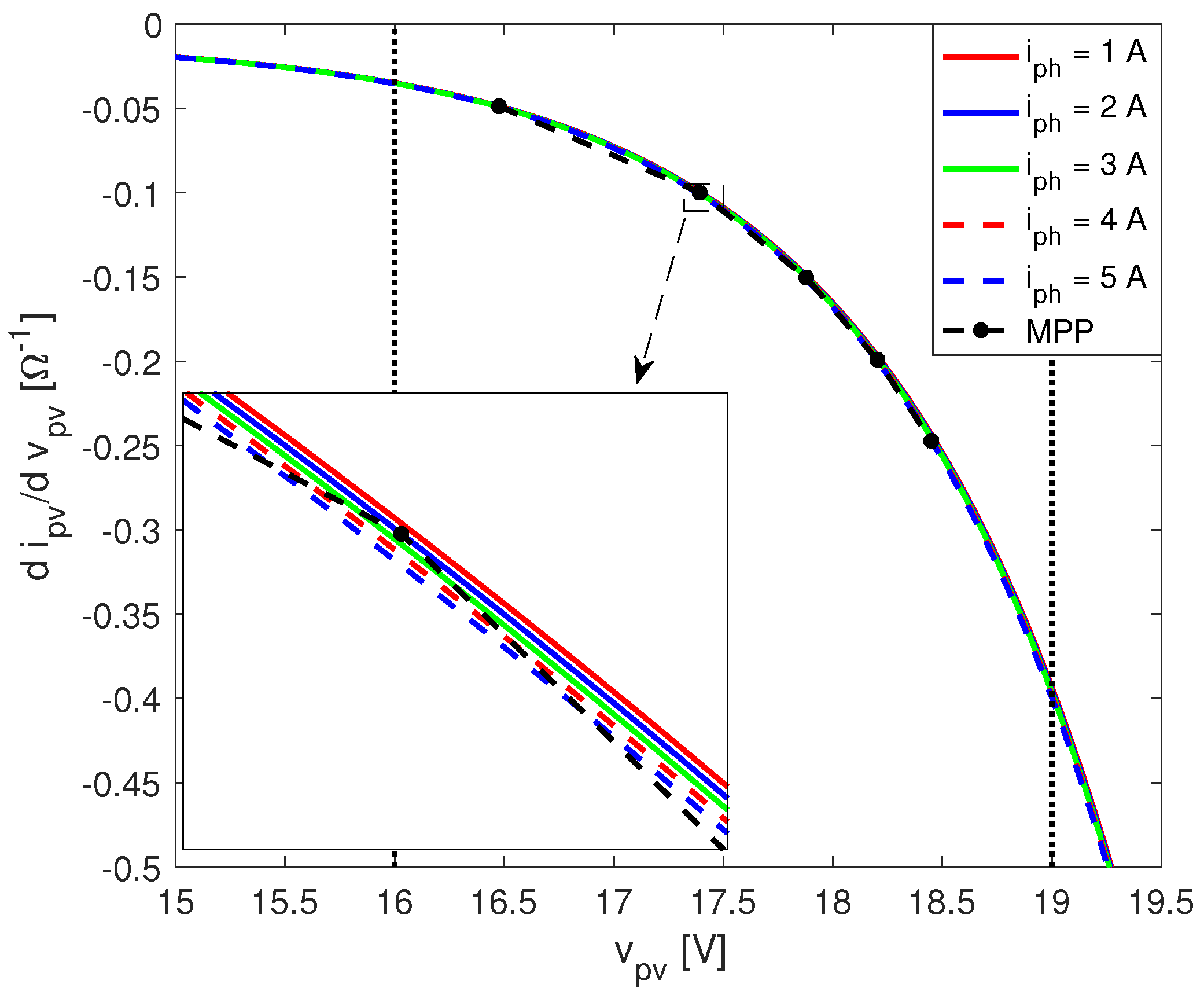
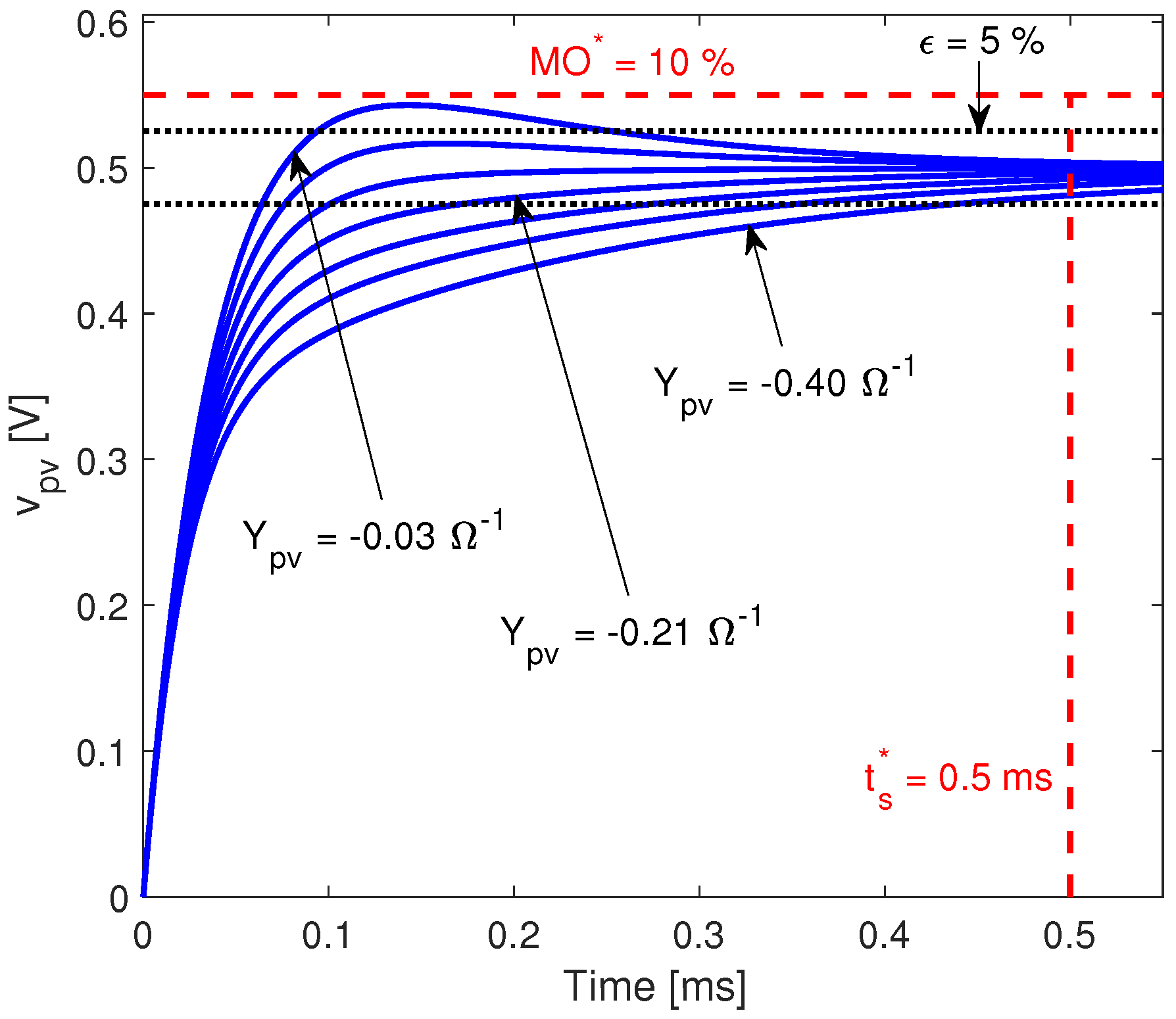
). The waveforms described in both MPPT conditions are in agreement with the equivalent dynamics analyses: at 1000 W/m
2 the MPP voltage is near 19 V, which corresponds to a PV module admittance near
according to the data reported in
Figure 9. Then, from
Figure 12 it is noted that such an admittance describes a PV voltage waveform without any overshoot and with a settling time equal to 0.5 ms, which corresponds to the waveform described by
at the top of
Figure 20. Similarly, at 500 W/m
2 the MPP voltage is near 18 V, which corresponds to a PV module admittance near
; and
Figure 12 reports that such an admittance describes a PV voltage waveform without any overshoot and with a settling time much shorter than 0.5 ms, which is equal to the waveform described by
in the middle of
Figure 20.
Finally, the bottom of
Figure 20 shows the waveform of the output voltage
for the first DMPPT-U operating in Protection mode, which occurs between 26 ms and 28 ms. During that time the SMC regulates
to avoid an overvoltage condition. The perturbations in
are caused by the MPPT action of the second DMPPT-U, which perturbs the overall output power, thus changing the relation between the output voltages of both DMPPT-Us. For example, at 25.9 ms the first DMPPT converter provides 65 W while the second one provides 39 W, which imposes
and
; at 26 ms the SMC of the second DMPPT converter receives a perturbation command from the P&O algorithm, forcing that converter to provide 38.64 W, which in turns changes the output voltages to
and
. However, the simulation confirms that the SMC imposes the desired settling time
ms to the first DMPPT-U in the regulation of the output voltage
under Protection mode. In this case no overshoot is observed.
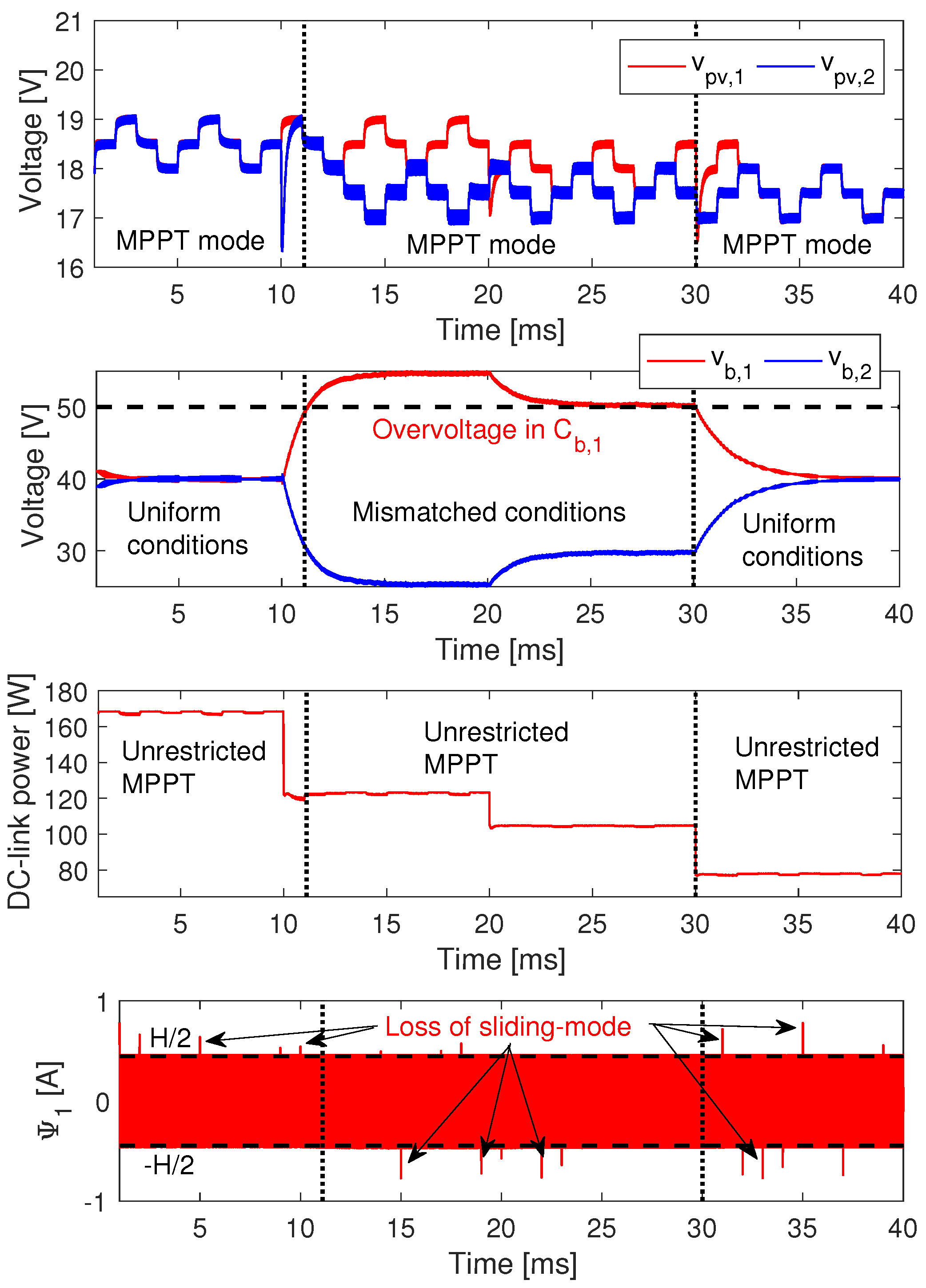
In contrast,
Figure 21 shows the simulation of the DMPPT system without activating both the Protection mode and slew-rate limitation. This simulation shows the overvoltage condition that occurs due to the operation in MPPT mode under the mismatching condition, which could destroy
and subsequently the DMPPT converters. Moreover, the SMC exhibits loss of the sliding-mode since the switching function
operates outside the hysteresis band due to the lack of dynamic constraints in the P&O reference.
Three DMPPT solutions were implemented to compare their performance with the proposed control strategy, where two of them are some of the most cited papers in double stage DMPPT systems, [
16,
23,
24], and the other is based on SMC [
30]. Simulation results introduced in
Figure 22 show the comparison of the proposed control strategy with the solutions proposed in [
16,
23,
24,
30] respectively.
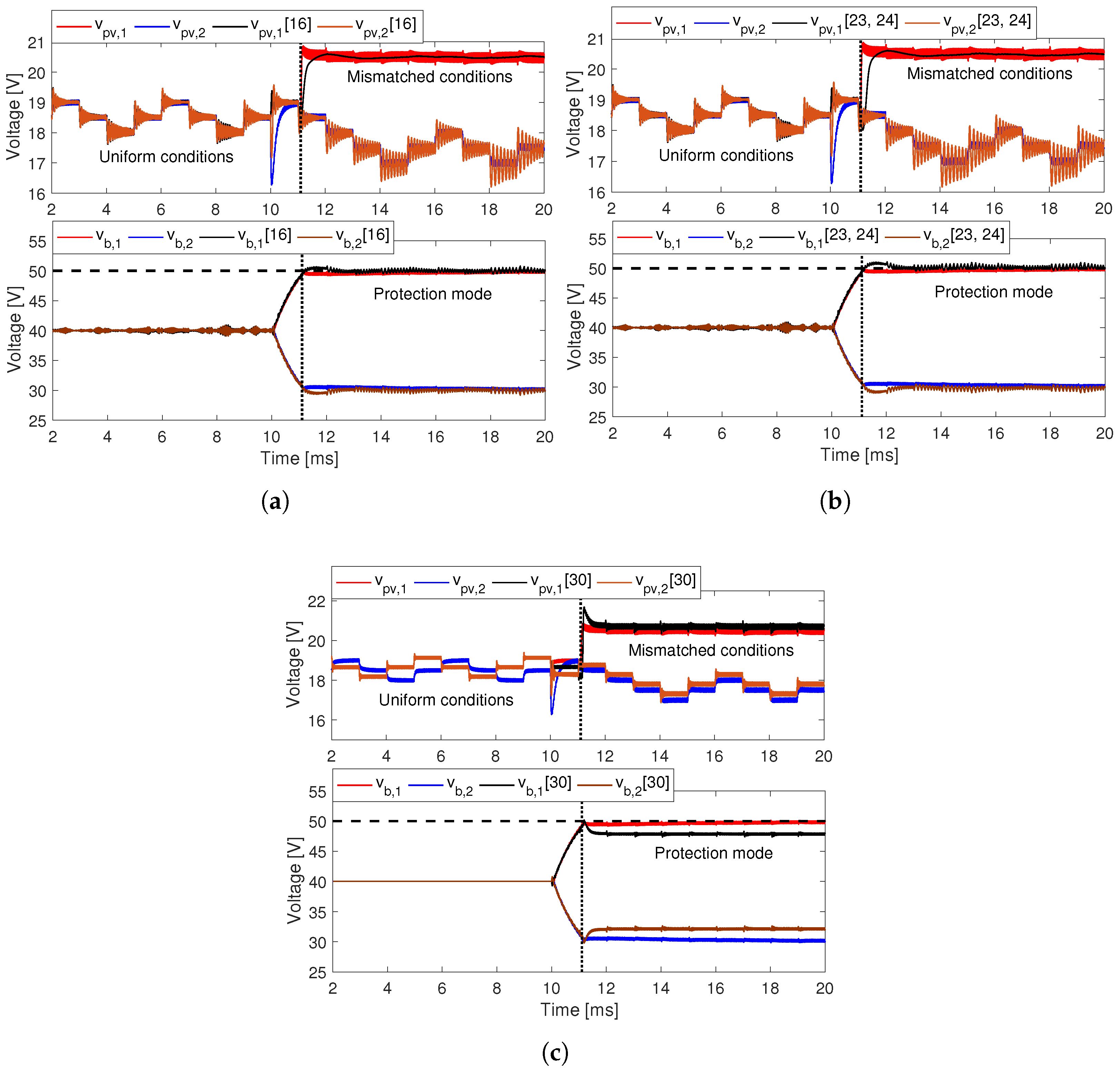
In [
16] the authors use P&O in MPPT mode and fix the duty cycle to keep
below its maximum value in Protection mode. Results in
Figure 22a shows an overshoot in
in the transition of the DMPPT-U from MPPT to Protection mode. Such an overshoot surpasses
, which may damage the output capacitor or the switching devices of the DMPPT-U. Moreover, the solution proposed in [
16] operates in open-loop during Protection mode and it cannot guarantee the regulation of
if there are perturbations like variations in the operation points of the other DMPPT-Us or oscillations introduced by the inverter. It is worth noting that the oscillations of
obtained with linear regulator are greater than the ones of the proposed SMC. Those oscillations are smaller for high values of
and larger for low values of
. Additionally, the amplitude of the oscillations increments when one DMPPT-U is in Protection mode.
Solution proposed in [
23,
24] uses a proportional controller to regulate
when the DMPPT-U operates in Protection mode. The effect of the proportional controller produces an overshoot in
(see
Figure 22b) that may damage the output capacitor and switching devices of the boost converter. Additionally, the proportional controller may introduce steady-state errors in and it is not able to reject perturbations produced by the inverter or changes in the operation condition. Even though solution in [
23,
24] uses Extremum Seeking Control in MPPT mode, the same P&O used in the other solutions were implemented in order to perform a fair comparison in the performance of the DMPPT-U during the transition and regulation in Protection mode.
In [
30] the DMPPT-U control is implemented with a SMC in MPPT and Protection modes, however, the SMC does not include integral terms to regulate
and
in the proposed switching function. There is no overshoot in the transition between MPPT and Protection modes (see
Figure 22c). Nevertheless, there is a steady-state error in
, which forces the DMPPT system to operate in a non-optimal condition, because the optimal condition of a DMPPT in Protection mode is
, as demonstrated in
Section 2 and
Figure 5. Moreover, the steady-state error in
is proportional to the current of the DMPPT-U to the DC link, therefore, it is difficult to predict. Solution introduced in [
30] also exhibits a steady-state error in
and small overshoots, with respect to the proposed solution. That steady-state error is partially compensated by the P&O
but deviates the MPPT technique from the MPP.
In conclusion, the simulation results put into evidence the correctness of the design equations and considerations developed in this paper. Moreover, the proposed solution guarantees zero steady-state error in MPPT and Protection modes, no overshoots in , and predictable dynamic behaviors in and in the entire operation range of the DMPPT-Us.
8. Experimental Implementation and Validation
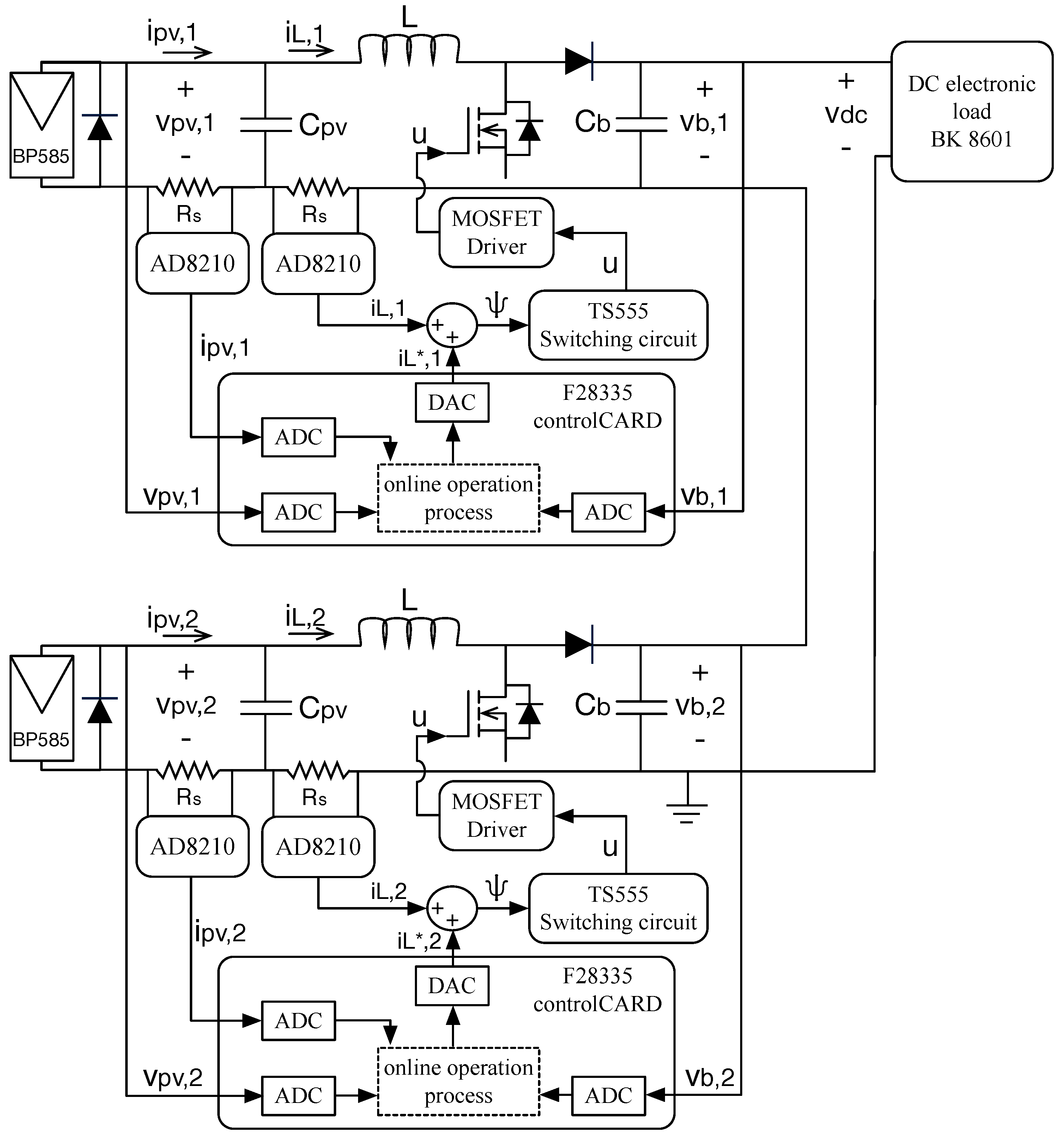
An experimental prototype was developed to validate the proposed solution. The prototype follows the structure adopted in the simulations: it is formed by two DMPPT converters connected in series, each one of them interacting with a BP585 PV panel. The circuital scheme of the prototype is depicted in
Figure 23, which reports the implementation of the proposed SMC. The digital steps of the SMC are processed using a DSP F28335 controlCARDs, which have ADC to acquire the current and voltage measurements needed. Both PV and inductor currents are measured using AD8210 circuits and shunt resistors to provide a high-bandwidth, and a MCP4822 DAC (labeled DAC in
Figure 23) was used to produce the signals
and
needed to generate the switching functions
. The DSP executes the designed sliding function presented in the structure defined in
Figure 18, the result of this operation is converted to an analog value and injected to a circuit based on operational amplifiers, which performs the control action
u by means of the TS555 device, based on the implementation presented in [
49]. This implementation gives the advantage of computing the high frequency signal (
) by means of analog circuits and the low frequency signal (
) in a digital form.
The grid-connected inverter reported in
Figure 2 was emulated using a BK8601 DC electronic load. Such an electronic load, configured in constant voltage mode, emulates the input voltage control imposed by a traditional grid-connected inverter.
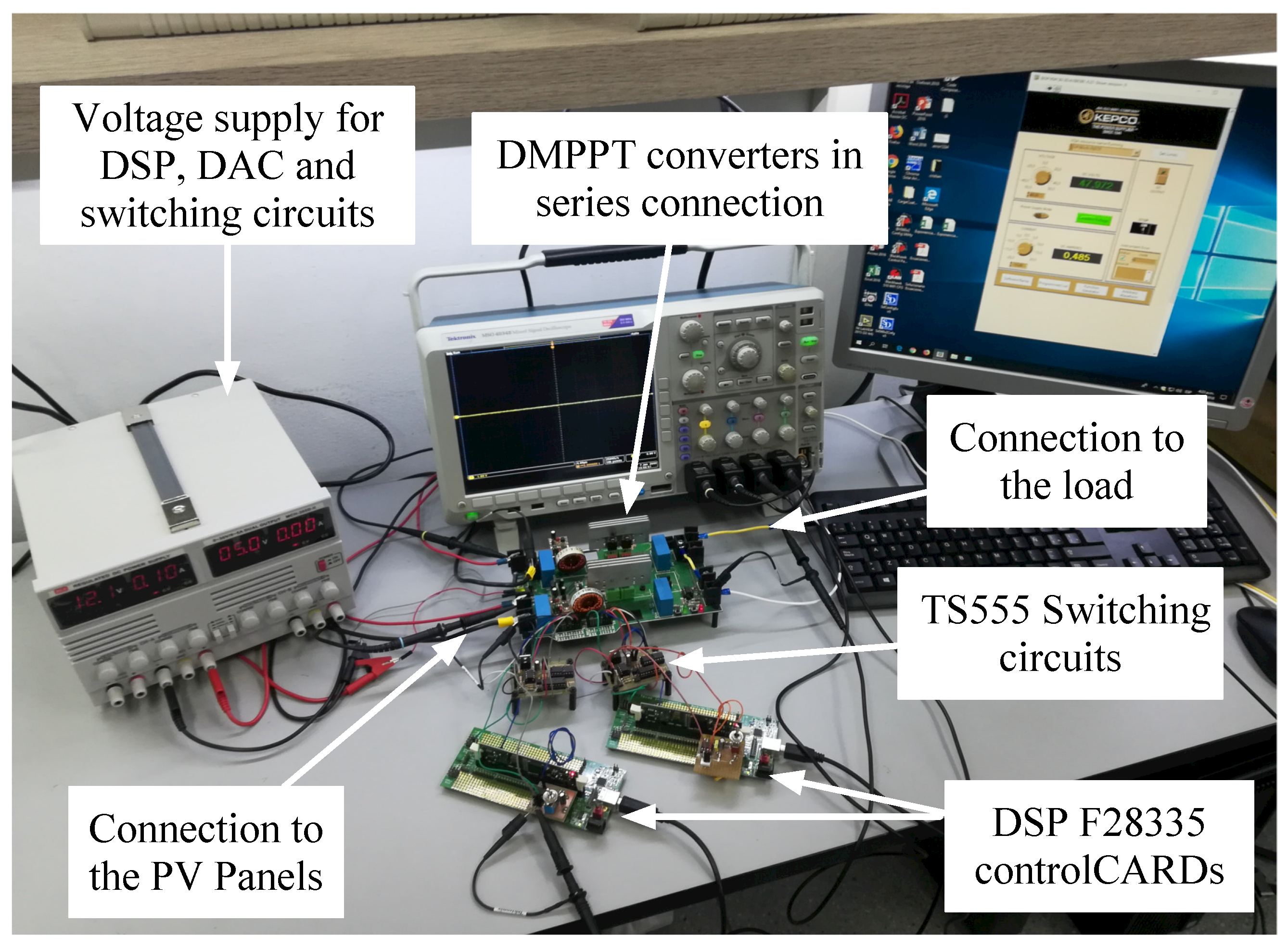
Figure 24 shows the experimental setup, which depicts the two DMPPT converters in series connection. Moreover, the figure also shows the controlCARDs, the TS555 switching circuits, and the connections to both the PV panels and electronic load. Finally, the experimental setup includes a voltage supply used to power the DSP, DAC and switching circuits.
The electrical elements used in the platform are: 2218-H-RC inductors from from Bourns Inc. with , MKT1813622016 capacitors from Vishay BC with and , IRF540N MOSFETs from International Rectifier and MOSFET drivers A3120 from Vishay Semiconductors. The shunt-resistors used to measure the currents were WSL12065L000FEA18 from Vishay Dale with . Finally, the SMC parameters were the same ones adopted for the simulations. However, the MPPT parameters were changed to and due to dynamic limitations of the BK8601 DC electronic load.
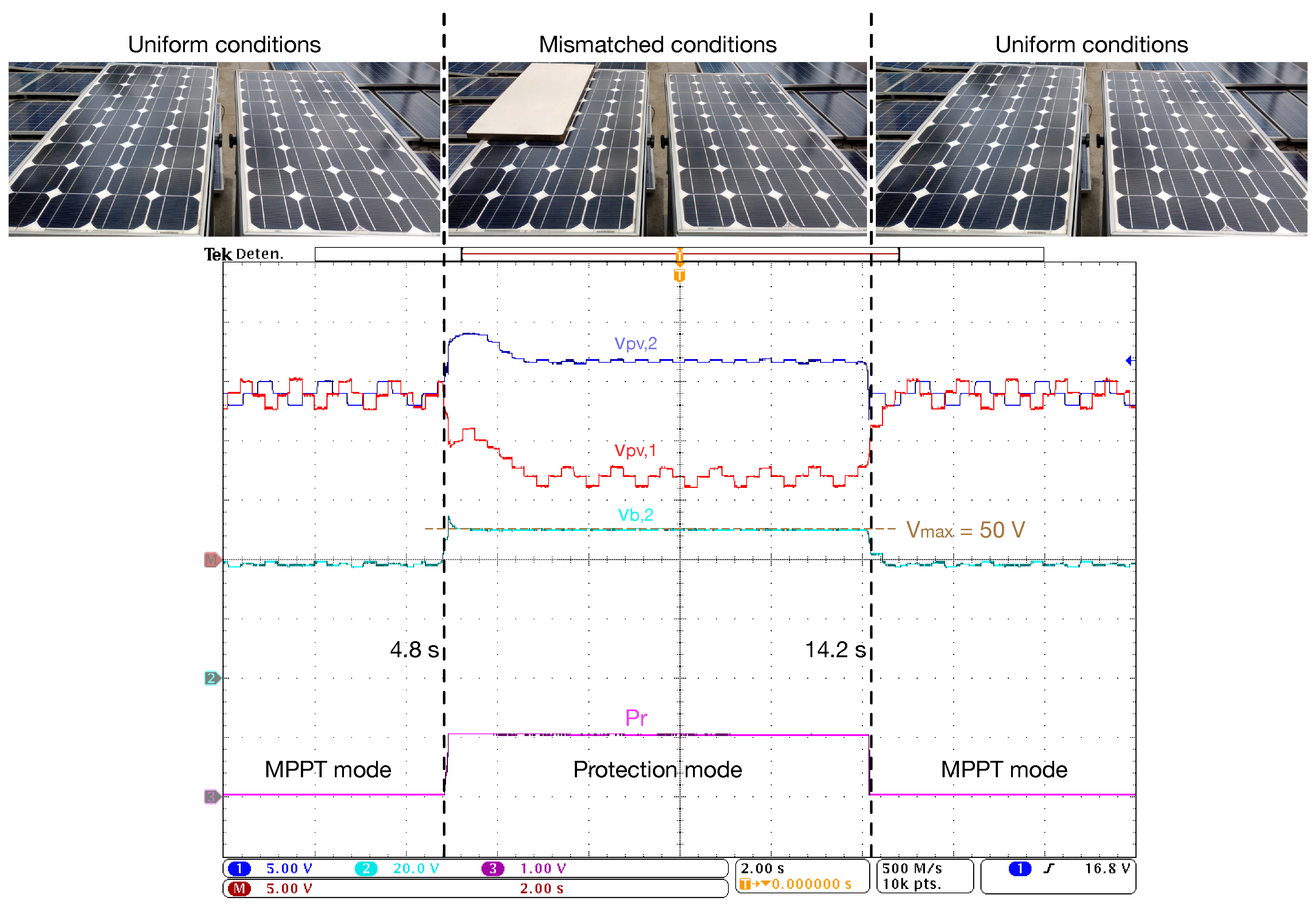
Figure 25 reports the experimental measurements of the prototype. The experiment starts with both BP585 PV panels under uniform conditions, which makes both DMPPT-U operate at the same MPP voltage and power. Therefore, the output voltages of both series-connected DMPPT converters are equal to
, which is under the overvoltage limit
. Such conditions force the proposed SMC to operate in MPPT mode, which is evident from the three-point behavior described by both PV voltage profiles
and
. This is also confirmed by signal
, which is equal to 0 at the start of the experiment.
To emulate a mismatched condition, the first PV panel is partially shaded using an obstacle as it is shown at the top of
Figure 25. Therefore, from
the first PV panel produces less power than the second PV panel, which forces the output voltage of the second DMPPT converter to grow. Subsequently, the SMC of the second DMPPT-U enters in Protection mode to prevent an overvoltage condition, i.e.,
, while the SMC of the first DMPPT-U keeps working in MPPT mode. The experiments confirm the correct protection of the second DMPPT converter provided by the proposed SMC.
The obstacle is removed at 14.2 s, which imposes uniform conditions again. Therefore, the SMC of the second DMPPT-U tracks the MPP voltage of the second PV panel by returning to MPPT mode.
In conclusion, the experiment reports a correct operation of the proposed SMC, in both Protection and MPPT modes, under the series-connection.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
























