In recently years, sustainability transitions, which aim to create more sustainable consumption and production for socio-technical systems, have become a significant issue. In the energy sector, the scarcity of fossil fuels and environmental pollution have become the important issues for the continuous development of human society. According to the current European roadmap, the reduction in greenhouse gas emission is necessary for limiting the politically agreed temperature increase by two degrees. In order to achieve this target, renewable energy as a percentage of gross final energy consumption should reach 20% [
1]. Therefore, the rapid development of renewable energy resources such as wind, solar and wave energy has been the common choice globally. Among these new resources, wind power has been growing fast worldwide and will continue growing to solve the energy crisis. Similar to the parameters which have an effect on power system, such as load control mode and power system operation, wind speed is significantly influential in wind power system. However, natural wind speed is nonstationary and random. Therefore, accurate forecasting of wind speed is a significant and challenging task.
Wind forecasting methods can generally be divided into the following categories: the persistence method, physical approach, statistical approach and hybrid approach [
2]. The persistence method is suitable for very short to short term forecasting. It is supposed that wind speed at next time will be the same as the current value. Although the performance of this method for long-term forecasting is unsatisfactory, it can still be a benchmark for comparison. In physical methods, numerical weather prediction (NWP) models are used to forecast wind speed and climate variables. Landberg utilized a Wind Atlas Application and Analysis program for corrections of wind speed predictions [
3]. Lazić et al. applied the regional atmospheric numerical weather prediction Eta model and effectively predicted wind power [
4]. Negnevitsky et al. introduced an adaptive neuro-fuzzy inference system to forecast a wind speed time series and obtained accurate predictions when weather conditions were stable [
5]. However, these physical models consume a large amount of computing time and the forecasting errors can be significant under complex conditions.
Statistical methods consider the relationship between the forecast wind speed and historical data. These models, including time-series approaches and machine learning approaches can be collectively called data-driven models. Time-series approaches such as autoregressive moving average models [
6], autoregressive integrated moving average models [
7] and others are widely adopted in the literature [
8]. The models mentioned above are based on the premise that the wind speed or power follows a normal distribution. Considering the randomness and non-stationarity of wind speed, it is difficult to accurately long-term predict through these time-series approaches. Machine learning approaches such as artificial neural networks (ANN) [
7,
9], recurrent neural networks (RNN) [
10,
11,
12], extreme learning machine (ELM) [
13,
14,
15] and support vector regression (SVR) [
15,
16] exhibit great nonlinear fitting ability through modeling from the historical data. In addition, signal process approaches have also been applied to improve the performance of machine learning forecasting results. Wang et al. proposed a three-phase signal decomposition technique to decompose wind speed and predicted multi-step ahead wind speed through feature extraction and weighted regularized extreme learning machine. Four real wind speed prediction cases verified the effectiveness of their proposed hybrid model [
17]. Liu et al. investigated hybrid methods using wavelet packet decomposition (WPD), empirical mode decomposition (EMD) and the ELM for wind speed prediction. Wind speed series were decomposed into low frequency and high frequency sub-layers. Different models including data-driven models and hybrid models were compared with each other and the results indicated that the hybrid model had the best predicting performance [
18]. Barbounis et al. employed meteorological information and different networks to deal with the problem of long-term wind speed and power forecasting. Simulation results demonstrated that the recurrent models outperformed the static ones [
10]. Senjyu et al. also confirmed the validity of neural networks (NN) for predicting wind speed by computer simulations and proposed an application of RNN for wind speed prediction [
19]. Abdoos decomposed wind speed through variational mode decomposition (VMD) and selected features based on Gram-Schmidt Orthogonalization. Then, ELM was trained using selected features for efficient and fast prediction. The results justified the superiority of their proposed method in accurate forecasting and saving computational time [
20]. Naik et al. combined variational mode decomposition with low rank multi-kernel ridge regression for short-term forecasting. They constructed prediction intervals with different confidence levels for wind speed and wind power [
21]. Although these methods achieved some satisfactory predicting results, most of them predicted single-step points subjected to the model structure. The accumulative errors of the aforementioned methods may be significant when forecasting multi-step data through iterative prediction. Consequently, predictive control and the dispatched mode for renewable power have been combined with multi-step forecasting. The precise results obtained from multi-step forecasting can help power systems make dispatch plans ahead and improve their competitiveness in energy markets. The ability of peak filling and valley filling of some renewable energy also benefits from precise multi-step forecasting and creates more potential financial benefits. Therefore, multi-step forecasting has become one of the research “hotspots” in wind speed forecasting. Recently, convolutional neural networks (CNNs) have shown an outstanding ability to discover useful representations for classification and regression tasks such as the generative model [
22], image classification [
23], fault diagnosis [
24], modelling sentences [
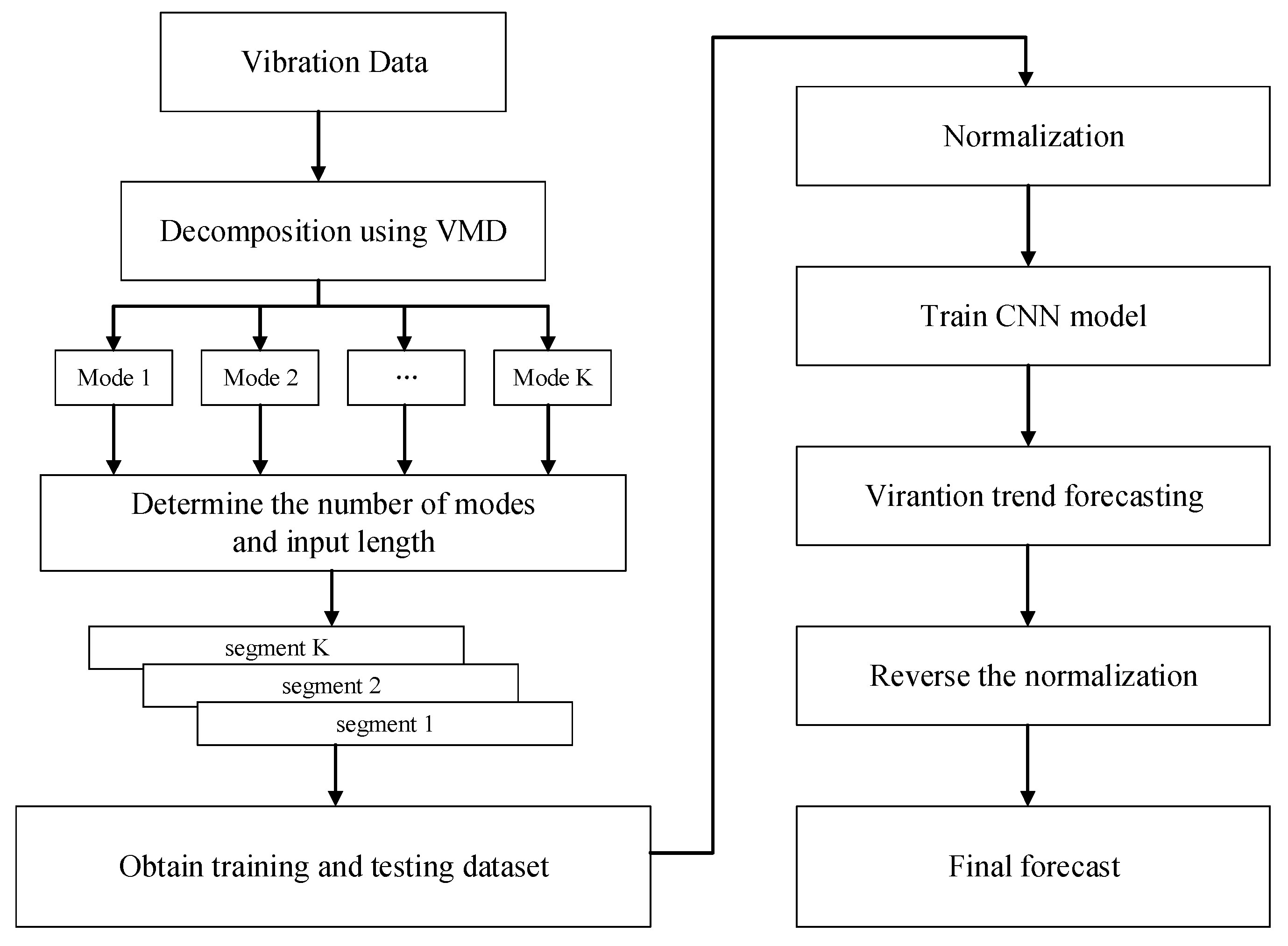
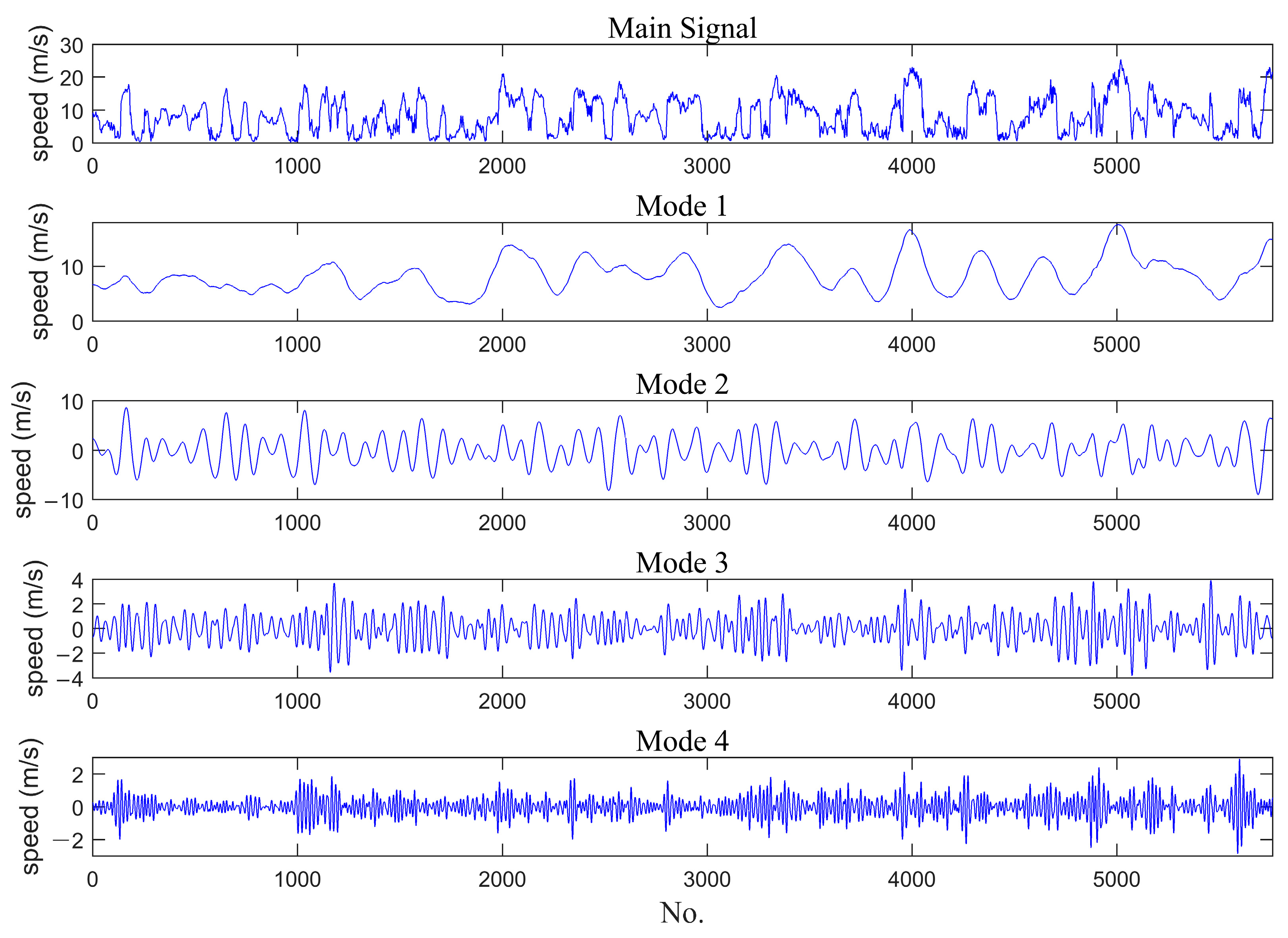
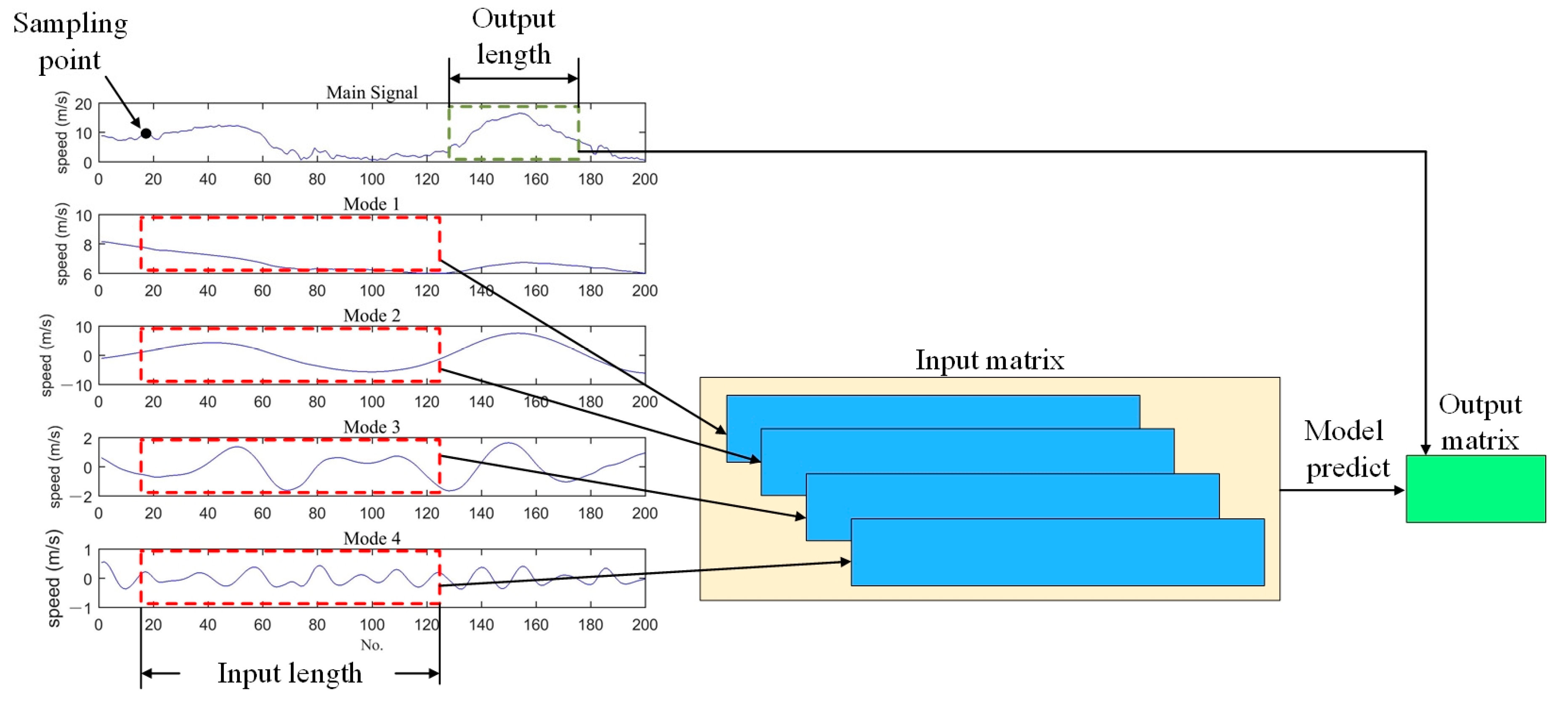
25], and so on. The output of the convolutional layer is multidimensional which offers the potential to address the challenges of multi-step wind speed forecasting. In this paper, a hybrid framework is proposed to predict the wind speed for a period of time instead of one point in time. The VMD approach is applied to decompose the wind speed series into modes as different channels of input. The decomposition of wind speed is helpful to enhance the performance of the forecasting. Then, the CNN is developed to address the problem of multi-step wind speed forecasting. We investigated the single-step and multi-step forecasting results of wind speed data from two wind farms in different areas with some other classical benchmark methods and the results proved the progressiveness of our proposed method.
The main contributions of our work for the field of multi-step wind speed forecasting are as follows:
The remainder of this paper is organized as follows. In
Section 2, several descriptions of the basic methodology of VMD and CNNs are reviewed. In
Section 3, we introduce the system framework and forecasting model in detail. The wind speed forecasting procedure is also illustrated. Then, in
Section 4. the time series of wind speed from different wind farms are applied to demonstrate the validity of the proposed method Finally,
Section 5 presents our conclusions.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}