Experimental Research for Stabilizing Offshore Floating Wind Turbines




Abstract
:1. Introduction
2. Challenges in the Present Application of Floating Wind Turbines
2.1. Limitations of Existing Floating Wind Turbines
- Spar-supported turbines—were initially designed for application in deep water, where the sufficient buoyancy force and desired motion stability of the turbine can be easily achieved. However, the mean water depth of the North Sea is only 90 m [15] and the existing and planned offshore wind farms in the UK are or will be developed mainly in nearshore shallow water. From this point of view, this kind of floating turbine cannot be widely adopted in the future British offshore wind market if it is not re-designed for application in relatively shallow water.
- Semi-submersible floater (SSF)-supported turbines—can easily obtain sufficient buoyancy in shallow water due to the use of multiple floaters. However, due to the large water plane areas of the floaters, the motion stability of this kind of turbine is sensitive to sea waves. This is a matter of concern because unstable motion will reduce the power generation efficiency of the turbine. To address this issue, this kind of turbine is usually equipped with active ballast systems. Taking WindFloat as an example, the turbine is mounted over one of the three floating columns. An alignment sensor is configured to detect the pitch angle of the turbine tower. Then based on the measurement result, water is pumped from one column to another to adjust the alignment of the tower. Apparently, such a turbine stabilization method is unable to respond quickly. There is difficulty to adapt it to the instantaneous changes in wind and wave loads.
- Tension leg platform (TLP)-supported turbines—are inspired by a deep-water design in the oil and gas industry. These structures are stable; however, prohibitively expensive [16]. Moreover, owing to the use of steel tethers, their cost will exponentially increase with the increase of water depth. For example, the PelaStar turbine, which is going to be installed in >50 m depth water, would cost more than £20 million [17]. There is no doubt that this kind of turbine is not favored by the wind farm developers, particularly, when they are facing pressure to lower the COE.
2.2. Limitations of Existing Measures That are Taken for Stabilizing Floating Wind Turbines
- It requires the blade pitch control system to be run frequently. It is well known that blade pitch control system is vulnerable to failure [4]. The frequent pitch control operation will further worsen the situation and make it more unreliable;
- The operation of blade pitch control system is based on the data collected by the wind farm Supervisory Control and Data Acquisition (SCADA) system. As the SCADA data is usually collected using a low sampling frequency, the method that is developed based on blade pitch control is unable to respond to the instantaneous changes in wind and wave loads;
- It can limit the movements caused by unstable wind loading. However, it is unable to reduce those caused by inconsistent waves and tidal current;
- It is not capable of dealing with both power generation efficiency and the motion stability of the turbine simultaneously. Therefore, how to improve motion stability while not sacrificing the power generation efficiency of the turbine is still an open issue remaining to be resolved.
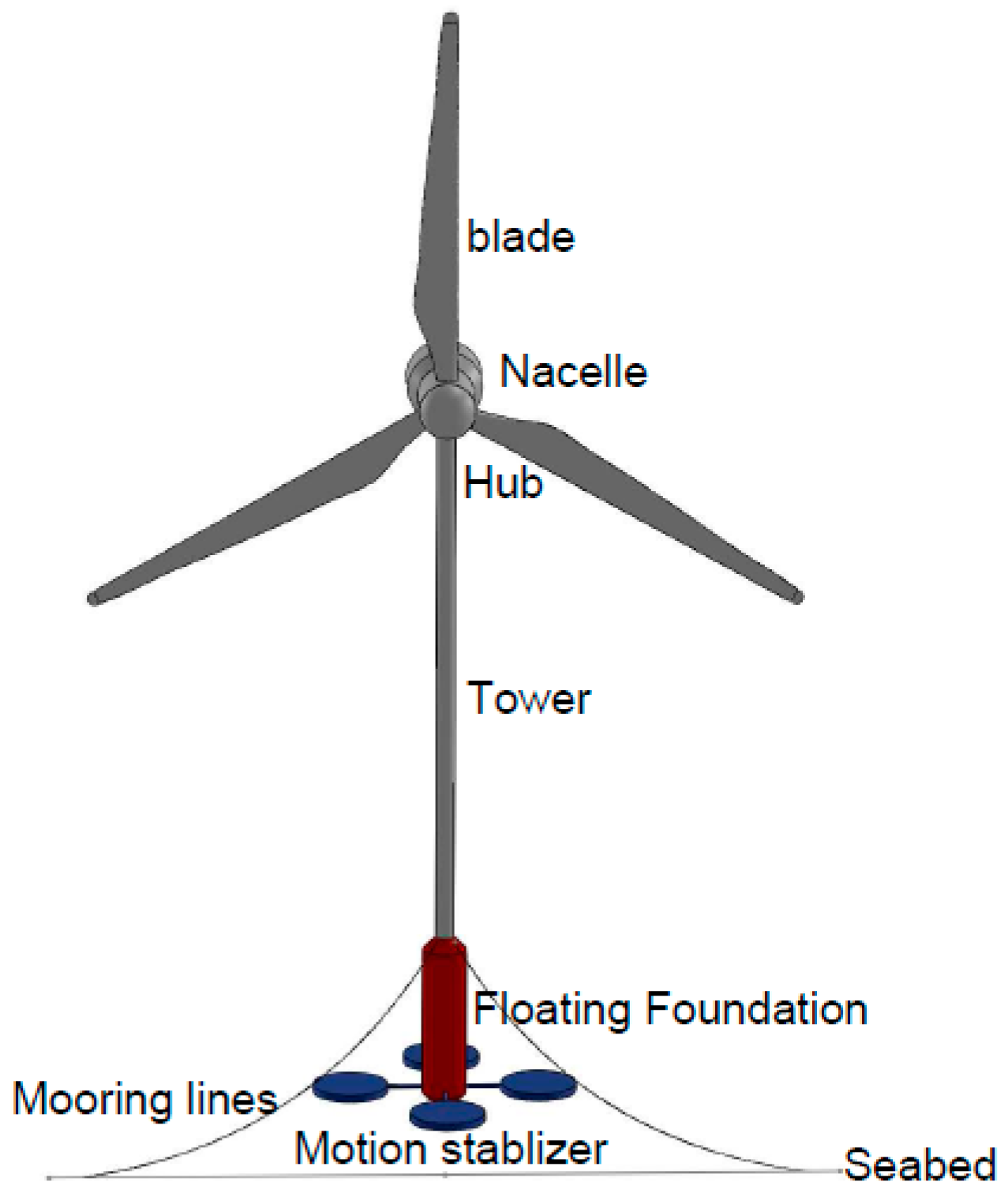
3. Proposal of a New Concept Motion Stabilizer
4. Tests of the Proposed Concept Stabilizer
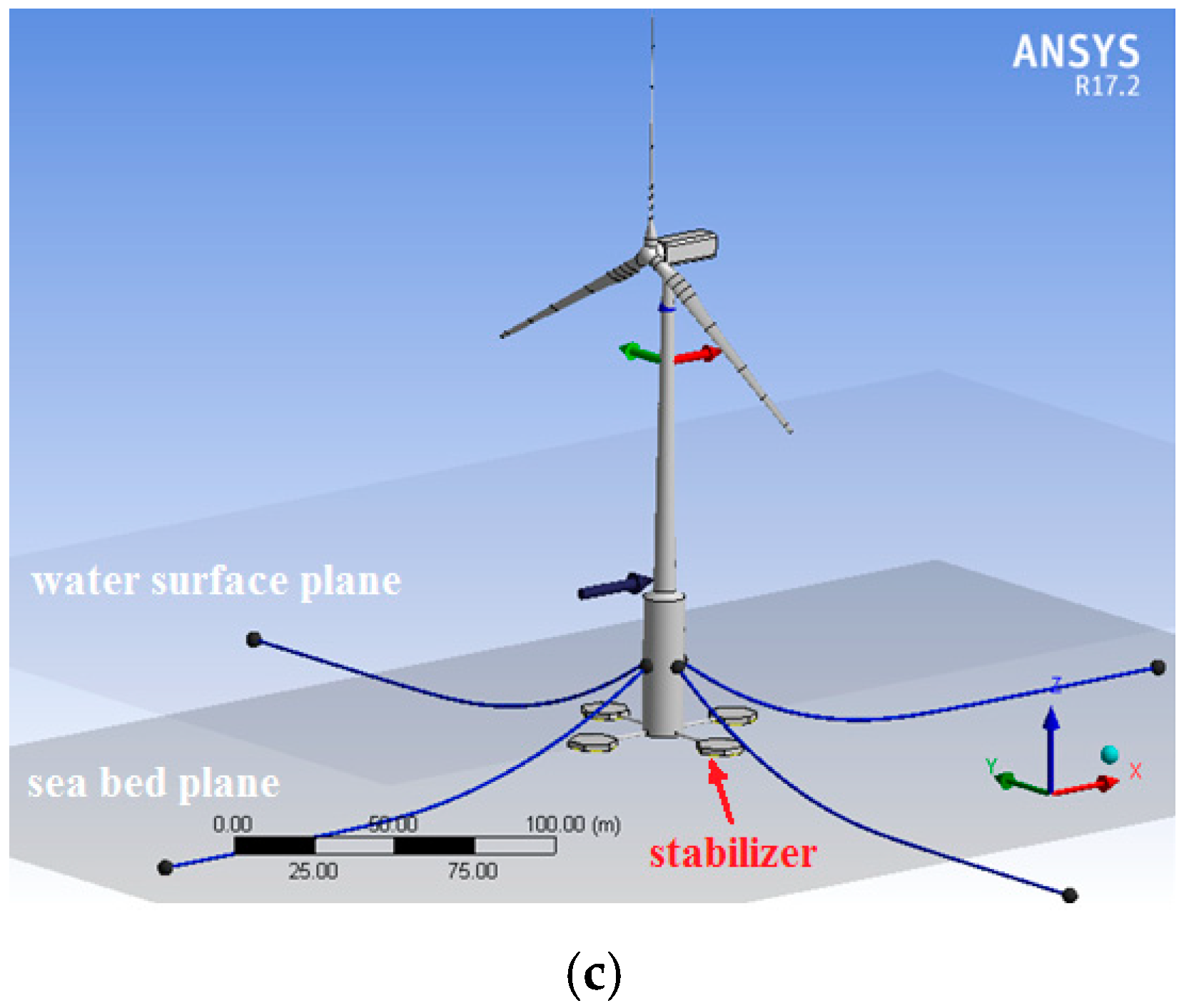
4.1. Numerical Tests
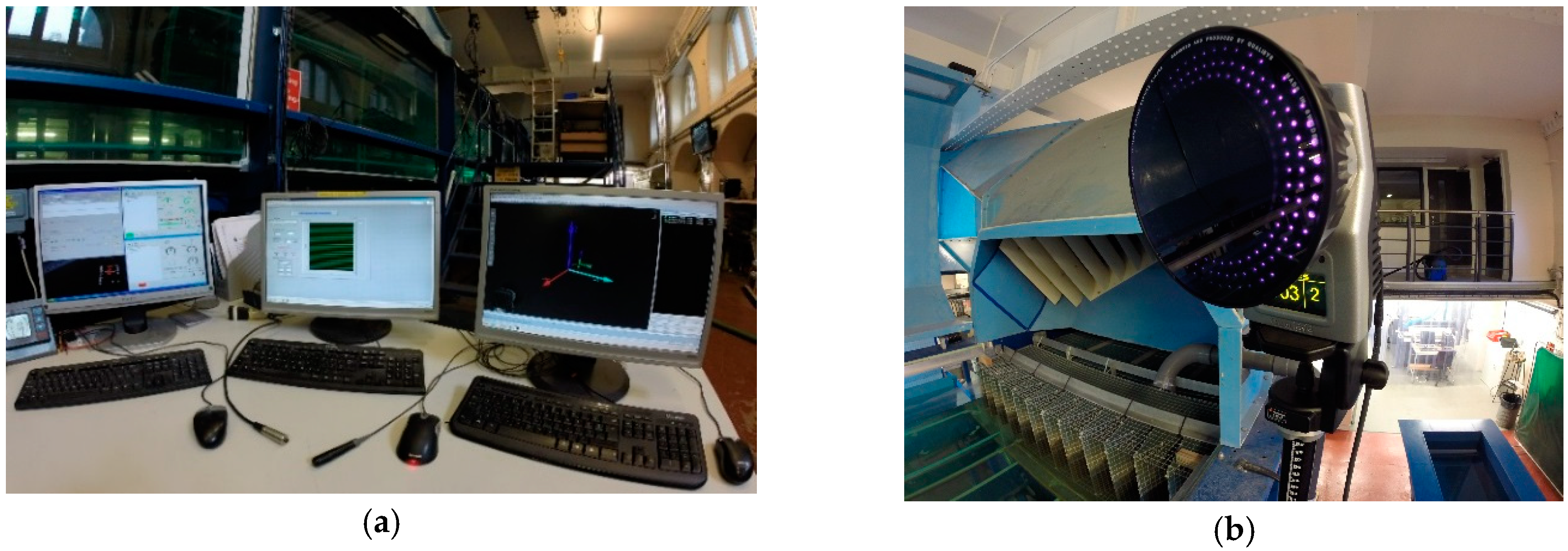
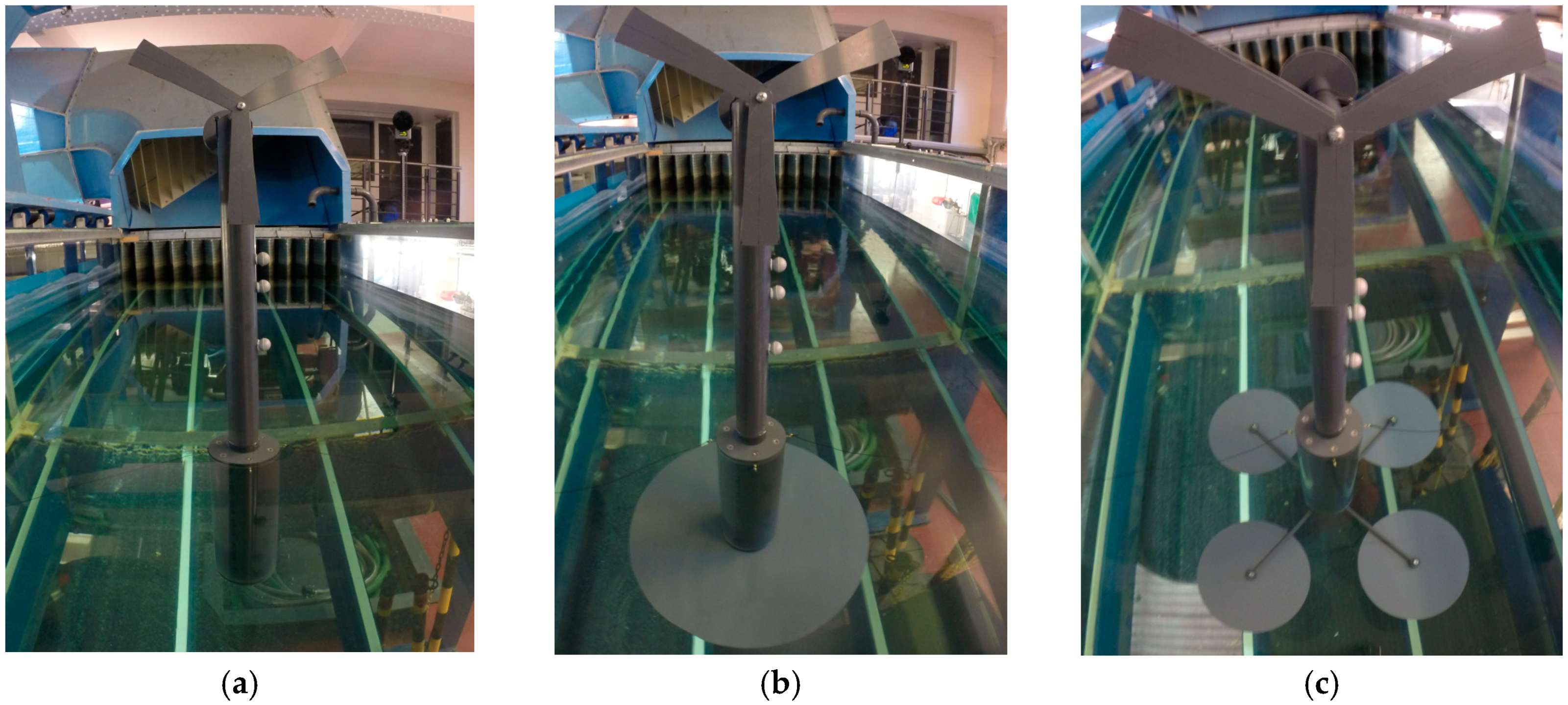
4.2. Experimental Tests
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- UK Offshore Deal ‘in Summer’. Available online: https://renews.biz/33498/uk-offshore-deal-in-summer (accessed on 16 May 2019).
- The European Offshore Wind Industry—Key Trends and Statistics. 2015. Available online: https://www.ewea.org/fileadmin/files/library/publications/statistics/EWEA-European-Offshore-Statistics-2015.pdf (accessed on 16 May 2019).
- Clean Energy Pipeline. Offshore Wind Project Cost Outlook. 2014. Available online: http://www.cleanenergypipeline.com/Resources/CE/ResearchReports/Offshore%20Wind%20Project%20Cost%20Outlook.pdf (accessed on 16 May 2019).
- Tavner, P. Offshore Wind Turbine: Reliability, Availability and Maintenance; IET: London, UK, 2012; ISBN 978-1-84919-229-3. [Google Scholar]
- Dinh, V.N.; McKeogh, E. Offshore Wind Energy: Technology Opportunities and Challenges: Energy and Geotechnics. In Proceedings of the 1st Vietnam Symposium on Advances in Offshore Engineering (VSOE 2018), Hanoi, Vietnam, 1–3 November 2018. [Google Scholar] [CrossRef]
- Dinh, V.N.; Basu, B. On the modeling of spar-type floating offshore wind turbines. Key Eng. Mater. 2013, 569–570, 636–643. [Google Scholar] [CrossRef]
- Hywind: Siemens and StatoilHydro Install First Floating Wind Turbine. 2009. Available online: https://www.siemens.com/press/en/presspicture/?press=/en/presspicture/2009/renewable_energy/ere200906064-01.htm (accessed on 16 May 2019).
- Dominique, R.; Christian, C.; Alexia, A.; Alla, W. WindFloat: A floating foundation for offshore wind turbines. J. Renew. Sustain. Energy 2010, 2, 033104. [Google Scholar]
- World’s First Floating Wind Farm has Started Production. Available online: https://www.statoil.com/en/news/worlds-first-floating-wind-farm-started-production.html (accessed on 17 May 2019).
- Fukushima Offshore Wind Consortium. Available online: http://www.fukushima-forward.jp/english (accessed on 17 May 2019).
- WindFloat Atlantic Project. Available online: https://www.repsol.com/en/sustainability/climate-change/new-energy-solutions/windfloat/index.cshtml (accessed on 17 May 2019).
- France Awards Contracts to 48 MW Floating Wind Pilots. Available online: https://renewablesnow.com/news/france-awards-contracts-to-48-mw-floating-wind-pilots-545682/ (accessed on 17 May 2019).
- Dogger Bank Wind Farms. Available online: https://doggerbank.com (accessed on 17 May 2019).
- Yang, W.; Tian, W.; Peng, Z.; Wei, K.; Feng, Y.; Qiu, Y. Numerical research of an effective measure for stabilizing floating wind turbines in shallow water. In Proceedings of the 7th International Conference on Renewable Power Generation, Copenhagen, Denmark, 26–27 September 2018. [Google Scholar]
- North Sea. Available online: https://en.wikipedia.org/wiki/North_Sea (accessed on 17 May 2019).
- Goupee, A.J.; Koo, B.J.; Kimball, R.W.; Lambrakos, K.F.; Dagher, H.J. Experimental comparison of three floating wind turbines concepts. ASME J. Offshore Mech. Arct. Eng. 2014, 136, 020906-1–020906-9. [Google Scholar] [CrossRef]
- PelaStar Cost of Energy: A Cost Study of the PelaStar Floating Foundation System in UK Waters. Available online: https://s3-eu-west-1.amazonaws.com/assets.eti.co.uk/documents/PelaStar-LCOE-Paper-21-Jan-2014.pdf?mtime=20160912135530 (accessed on 17 May 2019).
- Wind Power Monthly, Sway Floating Test Model Sinks off Norwegian Coast. November 2011. Available online: https://www.windpowermonthly.com/article/1107100/sway-floating-test-model-sinks-off-norwegian-coast (accessed on 17 May 2019).
- Hazim, N.; Karl, S. Control Methods for Reducing Platform Pitching Motion of Floating Wind Turbines. Available online: http://proceedings.ewea.org/offshore2009/allfiles2/189_EOW2009presentation.pdf (accessed on 6 March 2019).
- Tran, T.T.; Kim, D.H. The platform pitch motion of floating offshore wind turbine: A preliminary unsteady aerodynamic analysis. J. Wind Eng. Ind. Aerodyn. 2015, 142, 65–81. [Google Scholar] [CrossRef]
- Namik, H.; Stol, K. Performance analysis of individual blade pitch control of offshore wind turbines on two floating platforms. Mechatronics 2011, 21, 691–703. [Google Scholar] [CrossRef]
- Colwell, S.; Biswajit, B. Tuned liquid column dampers in offshore wind turbines for structural control. Eng. Struct. 2009, 31, 358–368. [Google Scholar] [CrossRef]
- Lackner, M.A.; Rotea, M.A. Structural control of floating wind turbines. Mechatronics 2011, 21, 704–719. [Google Scholar] [CrossRef]
- Si, Y.; Karimi, H.R.; Gao, H. Modeling and parameter analysis of the OC3-Hywind floating wind turbine with a tuned mass damper in nacelle. J. Appl. Math. 2013, 679071. [Google Scholar] [CrossRef]
- Haines, C.S.; Lima, M.D.; Li, N.; Spinks, G.M.; Foroughi, J.; Madden, J.D.; Kim, S.H.; Fang, S.; de Andrade, M.J.; Göktepe, F.; Göktepe, Ö. Artificial muscles from fishing line and sewing thread. Science 2014, 343, 868–872. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Wu, Z. Stabilization of floating offshore wind turbines by artificial muscle based active mooring line force control. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016. [Google Scholar]
- American Physical Society’s Division of Fluid Dynamics, The Secret of Dragonflies’ Flight. November 2014. Available online: https://www.sciencedaily.com/releases/2014/11/141124074735.htm (accessed on 17 May 2019).
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures (Cambridge Ocean Technology Series); Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Subbulakshmi, A.; Sundaravadivelu, R. Heave damping of spar platform for offshore wind turbine with heave plate. Ocean Eng. 2016, 121, 24–36. [Google Scholar] [CrossRef]
- Tao, L.; Molin, B.; Scolan, Y.M.; Thiagarajan, K. Spacing effects on hydrodynamics of heave plates on offshore structures. J. Fluids Struct. 2007, 23, 1119–1136. [Google Scholar] [CrossRef]
- Tian, X.; Tao, L.; Li, X.; Yang, J. Hydrodynamics coefficients of oscillating flat plates at 0.15≤KC≤3.15. J. Mar. Sci. Technol. 2017, 22, 101–113. [Google Scholar] [CrossRef]
- Brown, A.; Thomson, J.; Rusch, C. Hydrodynamic coefficients of heave plates with application to wave energy conversion. IEEE J. Ocean. Eng. 2018, 43, 983–996. [Google Scholar] [CrossRef]
- Nguyen, H.X.; Basu, B.; Dinh, V.N. Numerical investigation of wave-current interaction by using smoothed particle hydrodynamics. In Proceedings of the 1st Vietnam Symposium on Advances in Offshore Engineering (VSOE 2018), Hanoi, Vietnam, 1–3 November 2018. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Concept | Target Water Depth | Current Status | Type of Supporting Platform |
|---|---|---|---|
| Hywind | Prototype, 220 m Scotland, 95–120 m | In operation | Spar |
| Sway | Target, 60–300 m 1:6 scale prototype, 25 m | Prototype sank in 2011 | |
| Fukushima Hamakaze | 120 m | In operation | |
| WindFloat | Prototype, 40–50 m Portugal project, 100 m | Prototype is in operation | Semi-submersible floater (SSF) |
| Fukushima Mirai | >150 m | In operation | |
| Fukushima Shimpuu | 120 m | In operation | |
| Blue H | 113 m | In operation | Tension leg platform (TLP) |
| PelaStar | >50 m | In plan |
| Parameter | Value/Property |
|---|---|
| Rotor orientation | Upwind |
| Rotor configuration | 3 blades |
| Control | Variable speed, individual pitch control |
| Drivetrain | Permanent magnet direct drive |
| Rotor diameter | 164 m |
| Length of blade | 80 m |
| Hub height | 107 m |
| Cut-in wind speed | 4 m/s |
| Cut-out wind speed | 25 m/s |
| Rotor speed | 6.3—10.5 rpm |
| Nacelle | 20 (L) × 7.5 (W) × 8 (H) m |
| Tower diameter | Not available, 5–7.7 m in the numerical model |
| Rotor mass, excluding hub | 105,000 kg |
| Nacelle mass, including hub | 390,000 kg |
| Tower mass | Site dependent, 558,000 kg in the numerical model |
| Parameters | Catenary Section 1 | Catenary Section 2 | Catenary Section 3 |
|---|---|---|---|
| Section length (m) | 80 | 70 | 50 |
| Mass per unit length (kg/m) | 150 | 120 | 170 |
| Equivalent CSA (m2) | 0.01 | 0.01 | 0.01 |
| Stiffness, EA (N) | 600,000,000 | 900,000,000 | 600,000,000 |
| Maximum tension (N) | 7,500,000 | 7,500,000 | 7,500,000 |
| Added mass coefficient | 1.0 | 1.0 | 1.0 |
| Transverse drag coefficient | 1.0 | 1.0 | 1.0 |
| Equivalent diameter (m) | 0.1 | 0.1 | 0.1 |
| Longitudinal drag coefficient | 0.025 | 0.025 | 0.025 |
| Parameters | Floating Turbine that is Supported by | ||||
|---|---|---|---|---|---|
| Spar without Using Any Stabilizer | With a Single Heave Plate, R = 14 m | With a Four-Wing Stabilizer, R = 7 m | With a Four-Wing Stabilizer, R = 9 m | With a Four-Wing Stabilizer, R = 11 m | |
| Total Mass of the Turbine (kg) | 6,008,382 | 6,780,537 | 7,312,667 | 8,136,983 | 9,166,360 |
| Centre of Gravity (m) | −24.8 | −27.0 | −28.9 | −29.7 | −32.0 |
| Current Speed | Up to 1 m/s |
| Wind Speed | Up to 20 m/s |
| Wave Period | 0.8–4 s |
| Wave Height | 0.02–0.2 m |
| Wave Spectrum | Pierson–Moskowitz, JONSWAP, Bretschneider, Neumann |
| Loading Condition | Wave Period (s) | Wave Amplitude (m) | Current Speed (m/s) | Wind Speed (m/s) |
|---|---|---|---|---|
| Pure wave | 1.50 | 0.20 | – | – |
| 2.00 | 0.20 | – | – | |
| 3.00 | 0.20 | – | – | |
| 4.00 | 0.20 | – | – | |
| Wave–current | 1.50 | 0.20 | 0.10 | – |
| 2.00 | 0.20 | 0.10 | – | |
| 3.00 | 0.20 | 0.10 | – | |
| 4.00 | 0.20 | 0.10 | – | |
| Wind–wave–current | 1.50 | 0.20 | 0.10 | 2.50 |
| 2.00 | 0.20 | 0.10 | 2.50 | |
| 3.00 | 0.20 | 0.10 | 2.50 | |
| 4.00 | 0.20 | 0.10 | 2.50 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; Tian, W.; Hvalbye, O.; Peng, Z.; Wei, K.; Tian, X. Experimental Research for Stabilizing Offshore Floating Wind Turbines. Energies 2019, 12, 1947. https://doi.org/10.3390/en12101947
Yang W, Tian W, Hvalbye O, Peng Z, Wei K, Tian X. Experimental Research for Stabilizing Offshore Floating Wind Turbines. Energies. 2019; 12(10):1947. https://doi.org/10.3390/en12101947
Chicago/Turabian StyleYang, Wenxian, Wenye Tian, Ole Hvalbye, Zhike Peng, Kexiang Wei, and Xinliang Tian. 2019. "Experimental Research for Stabilizing Offshore Floating Wind Turbines" Energies 12, no. 10: 1947. https://doi.org/10.3390/en12101947
APA StyleYang, W., Tian, W., Hvalbye, O., Peng, Z., Wei, K., & Tian, X. (2019). Experimental Research for Stabilizing Offshore Floating Wind Turbines. Energies, 12(10), 1947. https://doi.org/10.3390/en12101947