Study on a Simplified Structure of a Two-Stage Grid-Connected Photovoltaic System for Parameter Design Optimization


Abstract
:1. Introduction
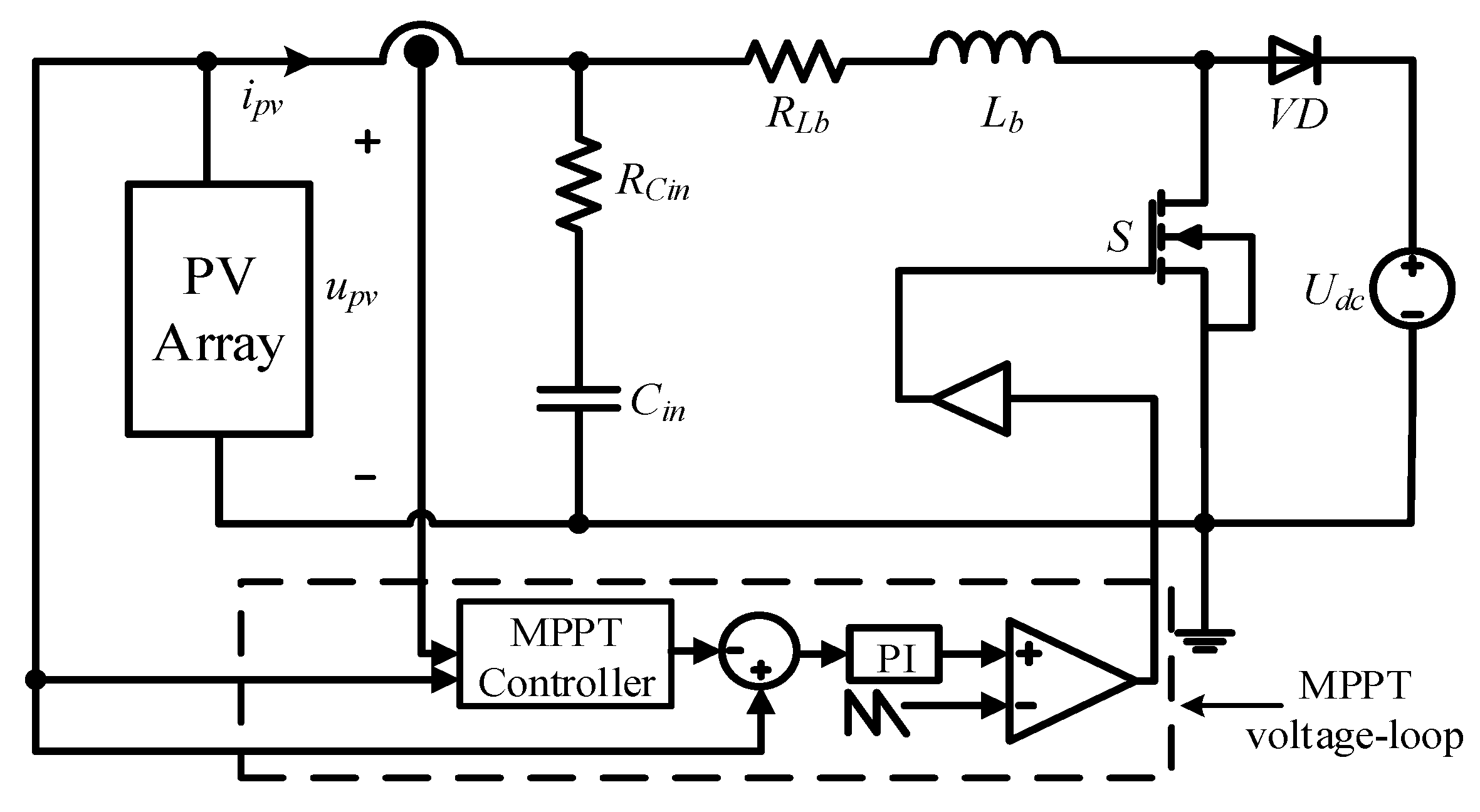
2. SS with MPPT Control
3. Stability Analysis of SS
3.1. Parameter Design
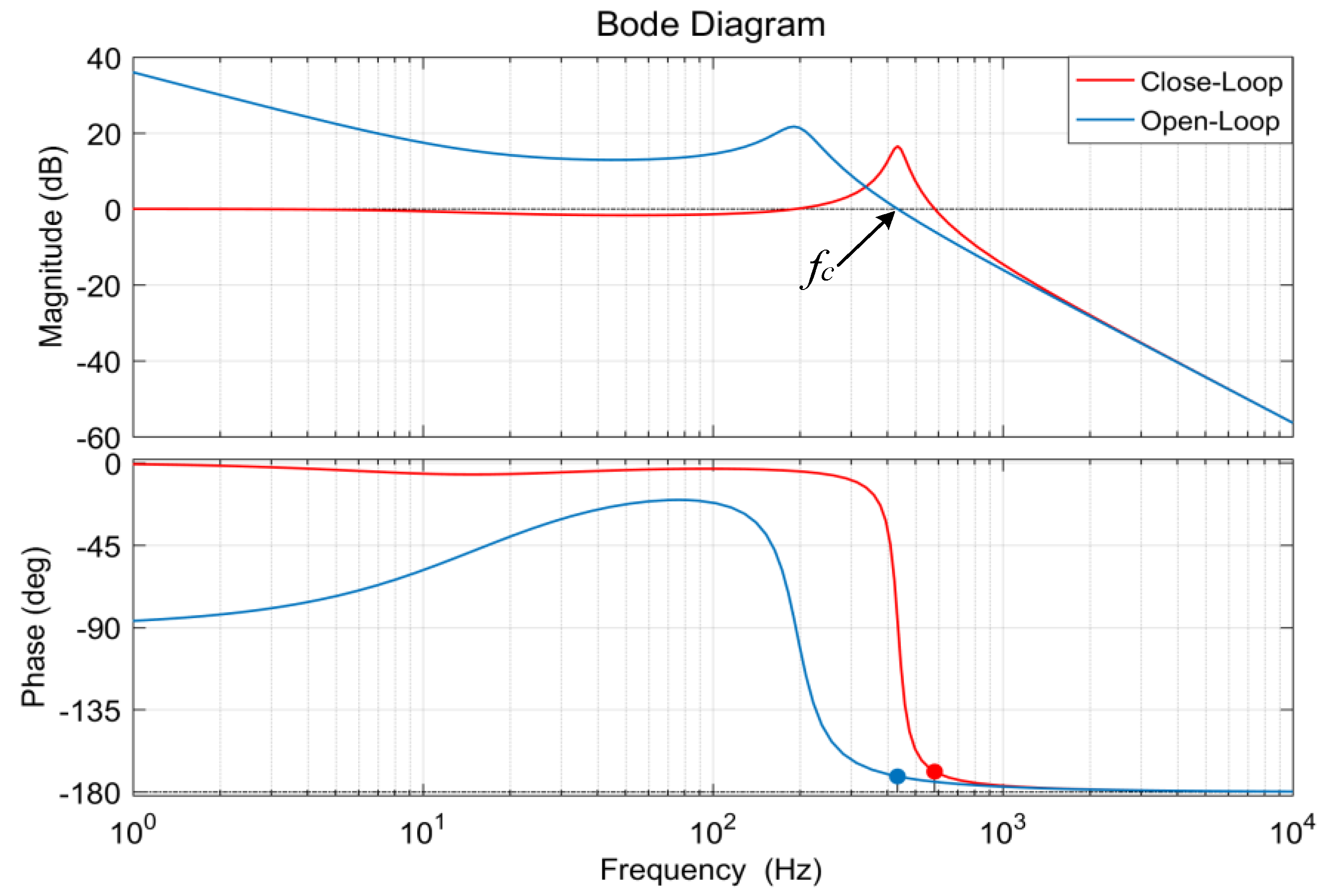
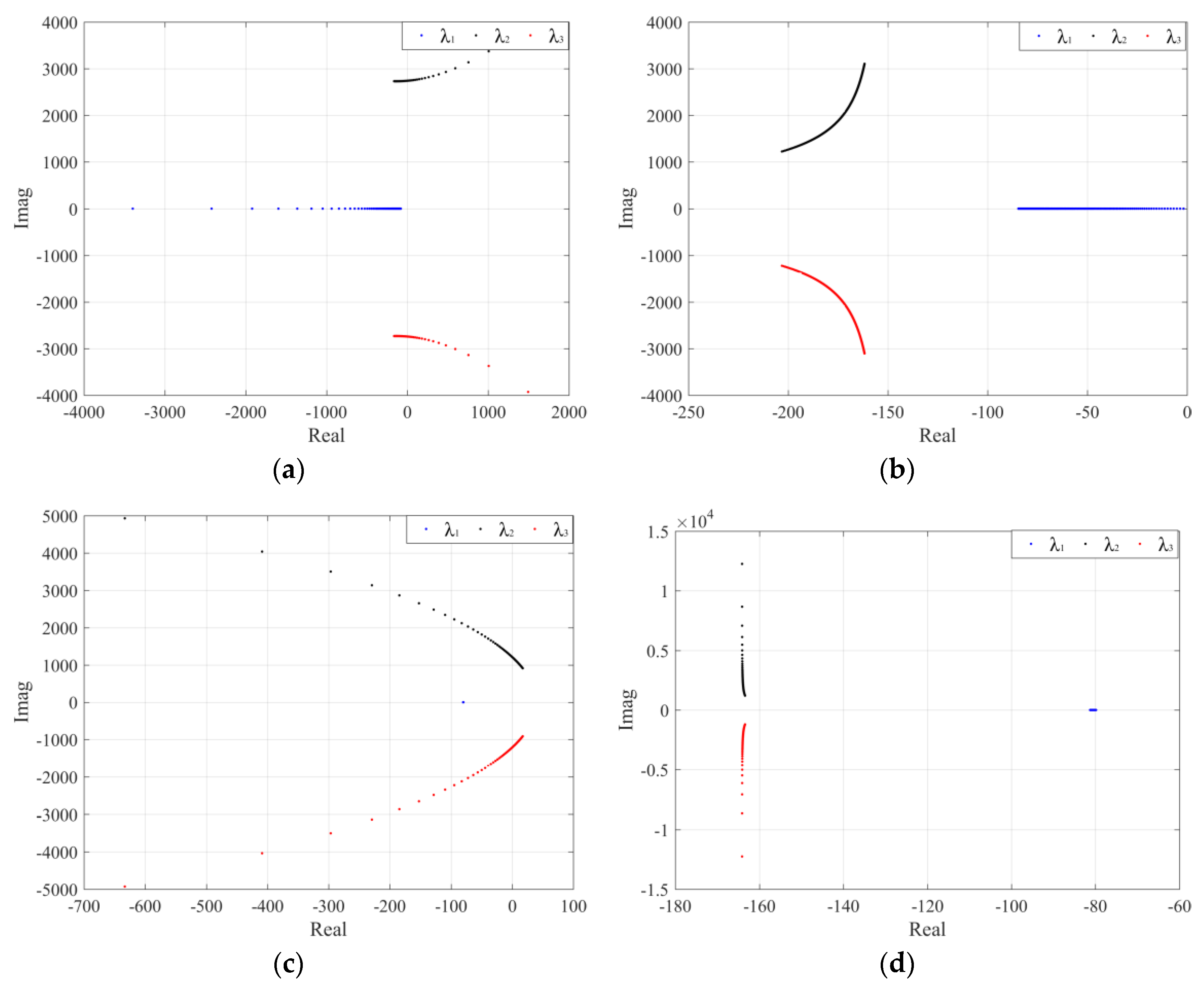
3.2. Stability
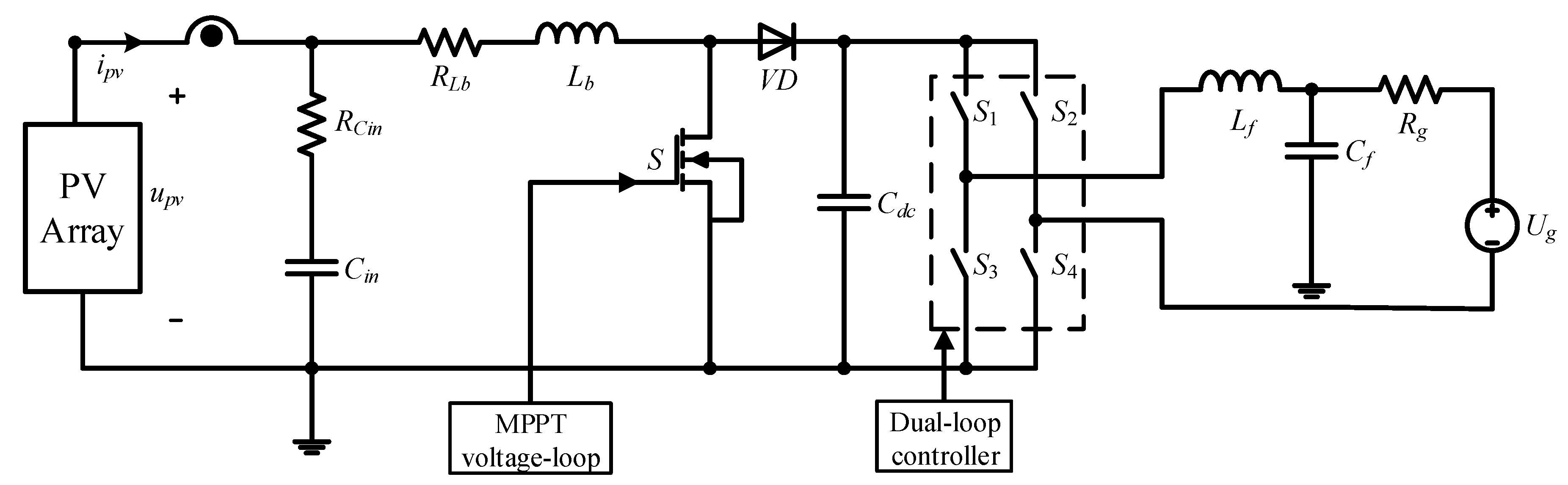
4. Comparison of Stability Analysis between CS and SS
4.1. Stable Boundary
4.2. Connection and Distinction of SS and CS
5. Experiment Verification
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kjaer, S.B.; Pedersen, J.K.; Blaabjerg, F. A review of single-phase grid-connected inverters for photovoltaic modules. IEEE Trans. Ind. Appl. 2005, 41, 1292–1306. [Google Scholar] [CrossRef]
- Pandey, A.K.; Tyagi, V.V.; Selvaraj, J.A.L.; Rahim, N.A.; Tyagi, S.K. Recent advances in solar photovoltaic systems for emerging trends and advanced applications. Renew. Sustain. Energy Rev. 2016, 53, 859–884. [Google Scholar] [CrossRef]
- Li, Q.; Wolfs, P. A review of the single phase photovoltaic module integrated converter topologies with three different DC link configurations. IEEE Trans. Power Electron. 2008, 23, 1320–1333. [Google Scholar]
- Darwish, A.; Massoud, A.M.; Holliday, D.; Ahmed, S.; Williams, B.W. Single-stage three-phase differential-mode buck-boost inverters with continuous input current for PV applications. IEEE Trans. Power Electron. 2016, 31, 8218–8236. [Google Scholar] [CrossRef]
- Haroun, R.; Aroudi, A.E.; Cid-Pastor, A.; Garcia, G.; Olalla, C.; Martinez-Salamero, L. Impedance matching in photovoltaic systems using cascaded Boost converters and sliding-mode control. IEEE Trans. Power Electron. 2015, 30, 3185–3199. [Google Scholar] [CrossRef]
- Martins, D.C.; Demonti, R. Photovoltaic energy processing for utility connected system. In Proceedings of the 27th Annual Conference of the IEEE Industrial-Electronics-Society, Denver, CO, USA, 29 November–2 December 2001; Volume 1–3. [Google Scholar]
- Prapanavarat, C.; Barnes, M.; Jenkins, N. Investigation of the performance of a photovoltaic AC module. Proc. IEE Gener. Transm. Distrib. 2002, 149, 472–478. [Google Scholar] [CrossRef]
- Al-Hindawi, M.M.; Abusorrah, A.; Al-Turki, Y.; Giaouris, D.; Mandal, K.; Banerjee, S. Nonlinear dynamics and bifurcation analysis of a boost converter for battery charging in photovoltaic applications. Int. J. Bifurc. Chaos 2014, 24, 373–491. [Google Scholar] [CrossRef]
- Zhioua, M.; Aroudi, A.E.; Belghith, S.; Bosque-Moncusí, J.M.; Giral, R.; Al Hosani, K.; Al-Numay, M. Modeling, dynamics, bifurcation behavior and stability analysis of a DC–DC boost converter in photovoltaic systems. Int. J. Bifurc. Chaos 2016, 26, 458–471. [Google Scholar] [CrossRef]
- Huang, M.; Ji, H.; Sun, J.; Wei, L.; Zha, X. Bifurcation based stability analysis of photovoltaic-battery hybrid power system. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1055–1067. [Google Scholar] [CrossRef]
- Wang, L.; Lin, Y.H. Small-signal stability and transient analysis of an autonomous PV system. In Proceedings of the IEEE/PES Transmission & Distribution Conference & Exposition, Chicago, IL, USA, 21–24 April 2008. [Google Scholar]
- Ge, J.; Du, H.; Zhao, D.; Ma, J.; Qian, M.; Zhu, L. Influences of grid-connected photovoltaic power plants on low frequency oscillation of multi-machine power systems. Autom. Electr. Power Syst. 2016, 40, 63–70. [Google Scholar]
- Gao, B.; Yao, L.; Li, R. Analysis on oscillation modes of large-scale grid-connected PV power plant. Electr. Power Autom. Equip. 2017, 37, 123–130. [Google Scholar]
- Tse, K.K.; Ho, M.T.; Chung, H.S.H.; Hui, S.Y. A novel maximum power point tracker for pv panels using switching frequency modulation. IEEE Trans. Power Electron. 2002, 17, 980–989. [Google Scholar] [CrossRef]
- Koutroulis, E.; Kalaitzakis, K.; Voulgaris, N.C. Development of a microcontroller-based, photovoltaic maximum power point tracking control system. IEEE Trans. Power Electron. 2001, 16, 46–54. [Google Scholar] [CrossRef]
- Sreekanth, T.; Lakshminarasamma, N.; Mishra, M.K. A Single-stage grid-connected high gain buck-boost inverter with maximum power point tracking. IEEE Trans. Energy Convers. 2017, 32, 330–339. [Google Scholar] [CrossRef]
- Saublet, L.M.; Gavagsaz-Ghoachani, R.; Martin, J.P.; Nahid-Mobarakeh, B.; Pierfederici, S. Asymptotic stability analysis of the limit cycle of a cascaded DC–DC converter using sampled discrete-time modeling. IEEE Trans. Ind. Electron. 2016, 63, 2477–2487. [Google Scholar] [CrossRef]
- Zadeh, M.K.; Gavagsaz-Ghoachani, R.; Pierfederici, S.; Nahid-Mobarakeh, B.; Pierfederici, S. Stability analysis and dynamic performance evaluation of a power electronics-based DC distribution system with active stabilizer. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 93–102. [Google Scholar] [CrossRef]
- Xie, F.; Zhang, B.; Qiu, D.; Jiang, Y. Non-linear dynamic behaviours of DC cascaded converters system with multi-load converters. IET Power Electron. 2016, 9, 1093–1102. [Google Scholar] [CrossRef]
- Huang, L.; Qiu, D.; Xie, F.; Chen, Y.; Zhang, B. Modeling and stability analysis of a single-phase two-stage grid-connected photovoltaic system. Energies 2017, 10, 2176. [Google Scholar] [CrossRef]
- Aroudi, A.E.; Giaouris, D.; Mandal, K.; Banerjee, S.; Al-Hindawi, M.; Abusorrah, A.; Al-Turki, Y. Complex nonlinear phenomena and stability analysis of interconnected power converters used in distributed power systems. IET Power Electron. 2016, 9, 855–863. [Google Scholar] [CrossRef]
- Figueres, E.; Garcera, G.; Sandia, J.; Gonzalez-Espin, F.; Rubio, J.C. Sensitivity study of the dynamics of three-phase photovoltaic inverters with an LCL grid filter. IEEE Trans. Ind. Electron. 2009, 56, 706–717. [Google Scholar] [CrossRef]
- Moradi-Shahrbabak, Z.; Tabesh, A. Effects of front-end converter and DC-link of a utility-scale PV energy system on dynamic stability of a power system. IEEE Trans. Ind. Electron. 2018, 65, 403–411. [Google Scholar] [CrossRef]
- Yang, S.; Lei, Q.; Peng, F.; Qian, Z. A robust control scheme for grid-connected voltage-source inverters. IEEE Trans. Ind. Electron. 2011, 58, 202–212. [Google Scholar] [CrossRef]
- Ouyang, Y.; Zou, Y. Static stability analysis of outer-loop control in grid-connected inverters under weak grid condition. In Proceedings of the International Conference on Power System Technology (POWERCON), Guangzhou, China, 6–8 November 2018. [Google Scholar]
- Viinamäki, J.; Jokipii, J.; Messo, T.; Suntio, T.; Sitbon, M.; Kuperman, A. Comprehensive dynamic analysis of photovoltaic generator interfacing DC–DC boost power stage. IET Renew. Power Gener. 2015, 9, 306–314. [Google Scholar] [CrossRef]
- Khouzam, K.; Cuong, L.; Chen, K.K.; Poo, Y.N. Simulation and real-time modelling of space photovoltaic systems. In Proceedings of the IEEE 1st World Conference on Photovoltaic Energy Conversion, Waikoloa, HI, USA, 5–9 December 1994; Volume 2, pp. 2038–2041. [Google Scholar]
- Hung, M.F.; Tseng, K.H. Study on the corresponding relationship between dynamics system and system structural configurations-Develop a universal analysis method for eliminating the RHP-zeros of system. IEEE Trans. Ind. Electron. 2018, 65, 5774–5784. [Google Scholar] [CrossRef]
- Gao, F.; Li, D.; Loh, P.C.; Tang, Y.; Wang, P. Indirect dc-link voltage control of two-stage single-phase PV inverter. In Proceedings of the IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 1166–1172. [Google Scholar]
- Yazdani, A.; Dash, P.P. A control methodology and characterization of dynamics for a photovoltaic (PV) system interfaced with a distribution network. IEEE Trans. Power Deliv. 2009, 24, 1538–1551. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Open-circuit Voltage | Uoc | 21 | V |
| Short-circuit Current | Isc | 1.83 | A |
| Maximum Power Point Voltage | UM | 18 | V |
| Maximum Power Point Current | IM | 1.66 | A |
| Example | Kp1 | Ti1 | λ1 | λ2,3 | ξ | fOS/Hz | GM | PM | Stability |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.11 | 0.01 | −80.12 | −163.96 ±2731.67i | 0.0599 | 434.76 | +Inf | 8.56° | Stable |
| 2 | 0.11 | 0.001 | −769.85 | 180.90 ±2785.85i | −0.0648 | 443.38 | −15.2 dB | −9.42° | Unstable |
| 3 | 0.05 | 0.01 | −64.62 | −171.71 ±2047.13i | 0.0836 | 325.81 | +Inf | 14.8° | Stable |
| 4 | 0.05 | 0.001 | −623.17 | 107.56 ±2089.24i | −0.0514 | 332.51 | −8.33 dB | −8.98° | Unstable |
| 5 | 0.11 | 0.0068 | −1072.42 | 332.19 ± 2849.09i | −0.1158 | 453.45 | −20.3 dB | −17.3° | Unstable |
| Parameters | Sλ1 | Sλ2,3 |
|---|---|---|
| Cin | 208.7155 | 618,063.1474 ± 4,113,062.7390i |
| Lb | −140.9152 | 58.7597 ± 687,790.4019i |
| Kp1 | −145.1916 | 72.7656 ± 9981.7933i |
| Ti1 | 8033.2560 | −4016.6280 ± 123.3540i |
| Parameters | RSRe(λ1) | RSRe(λ2,3) |
|---|---|---|
| Cin | 0.00086 | 0.243054 |
| Lb | −0.003518 | 0.000717 |
| Kp1 | −0.199342 | −0.15669 |
| Ti1 | 1.002668 | −0.24497 |
| Symbol | Cin | Lb | Cdc | Lf | Cf | fs | Ugm |
|---|---|---|---|---|---|---|---|
| Quantity | 330 uF | 2 mH | 660 uF | 18 mH | 0.5 uF | 20 kHz | 17 V |
| Symbol | Kp1 | Ti1 | Kp2 | Ti2 | Kp3 | Ti3 | Zg |
| Quantity | 0.11 | 0.01 | 3.05 | 0.55 | 0.3 | 0.00014 | 0.2 Ω |
| Area | Symbol | RSRe(λ1) | RSRe(λ2,3) | RSRe(λ4,5) | RSRe(λ6,7) | RSRe(λ8) | RSRe(λ9) | RSRe(λ10,11) |
|---|---|---|---|---|---|---|---|---|
| Cicuit Parameters | Cin | 0.000642 | −6.758 × 10−10 | −6.833 × 10−9 | 0.001866 | 0.000753 | 5.344 × 10−8 | 0 |
| Lb | −0.000646 | −0.000002 | −0.000004 | 0.000887 | −0.003511 | −4.277 × 10−9 | 0 | |
| Cdc | 0.184256 | 0.000447 | 0.000637 | 9.482 × 10−7 | 2.860 × 10−7 | −0.000091 | 0 | |
| Lf | 0.112214 | 0.094583 | 0.006227 | 0.000002 | 1.354 × 10−8 | −0.000003 | 0 | |
| Control Parameters | Kp1 | −0.000531 | −7.825 × 10−9 | 7.870 × 10−9 | −0.000604 | −0.199416 | 0.000040 | 0 |
| Ti1 | −0.000012 | 1.23193 × 10−9 | −3.270 × 10−9 | −0.000896 | 1.002759 | −0.000004 | 0 | |
| Kp2 | −0.337422 | −0.000387 | −0.000517 | 0.000074 | −0.00007 | −0.000356 | 0 | |
| Ti2 | −0.000136 | −1.249 × 10−7 | −0.000002 | 3.270 × 10−8 | −0.000002 | 1.000161 | 0 | |
| Kp3 | −0.263605 | 0.000879 | −0.001749 | 0.000001 | −5.129 × 10−9 | −0.000438 | 0 | |
| Ti3 | 0.704758 | −0.000053 | −0.006086 | −0.000005 | −3.708 × 10−8 | 0.000945 | 0 |
| PF | λ1 | λ2,3 | λ4,5 | λ6,7 | λ8 | λ9 | λ10,11 |
|---|---|---|---|---|---|---|---|
| uCin | 0.000099 | 1.695 × 10−8 | 0.000005 | 0.097897 | 0.804096 | 1.588 × 10−8 | 0 |
| iLb | 0.000646 | 0.000004 | 0.000476 | 0.501598 | 0.003511 | 3.979 × 10−9 | 0 |
| uc1 | 0.000531 | 0.000001 | 0.000008 | 0.400021 | 0.199416 | 0.000004 | 0 |
| udc | 0.153302 | 0.000275 | 0.075594 | 0.000954 | 0.000071 | 0.999728 | 0 |
| iod | 0.000211 | 0.498952 | 0.000944 | 0.000002 | 4.491 × 10−10 | 1.293 × 10−7 | 0 |
| ioq | 0.020693 | 0.000568 | 0.509190 | 0.000589 | 7.752 × 10−7 | 2.383 × 10−8 | 0 |
| ue | 0.911923 | 0.00181 | 0.043321 | 0.001300 | 0.000071 | 0.000343 | 0 |
| uc2d | 0.000104 | 0.499432 | 0.000514 | 0.000002 | 2.013 × 10−9 | 1.121 × 10−9 | 0 |
| uc2q | 0.261774 | 0.001041 | 0.369947 | 0.000240 | 2.251 × 10−7 | 0.000067 | 0 |
| g1 | 0 | 0 | 0 | 0 | 0 | 0 | 0.5 |
| g2 | 0 | 0 | 0 | 0 | 0 | 0 | 0.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, F.; Luo, Z.; Qiu, D.; Zhang, B.; Chen, Y.; Huang, L. Study on a Simplified Structure of a Two-Stage Grid-Connected Photovoltaic System for Parameter Design Optimization. Energies 2019, 12, 2193. https://doi.org/10.3390/en12112193
Xie F, Luo Z, Qiu D, Zhang B, Chen Y, Huang L. Study on a Simplified Structure of a Two-Stage Grid-Connected Photovoltaic System for Parameter Design Optimization. Energies. 2019; 12(11):2193. https://doi.org/10.3390/en12112193
Chicago/Turabian StyleXie, Fan, Zhenxiong Luo, Dongyuan Qiu, Bo Zhang, Yanfeng Chen, and Liying Huang. 2019. "Study on a Simplified Structure of a Two-Stage Grid-Connected Photovoltaic System for Parameter Design Optimization" Energies 12, no. 11: 2193. https://doi.org/10.3390/en12112193
APA StyleXie, F., Luo, Z., Qiu, D., Zhang, B., Chen, Y., & Huang, L. (2019). Study on a Simplified Structure of a Two-Stage Grid-Connected Photovoltaic System for Parameter Design Optimization. Energies, 12(11), 2193. https://doi.org/10.3390/en12112193