DSP Implementation of a Neural Network Vector Controller for IPM Motor Drives


Abstract
:1. Introduction
2. Neural Network and Conventional Standard Control Structures
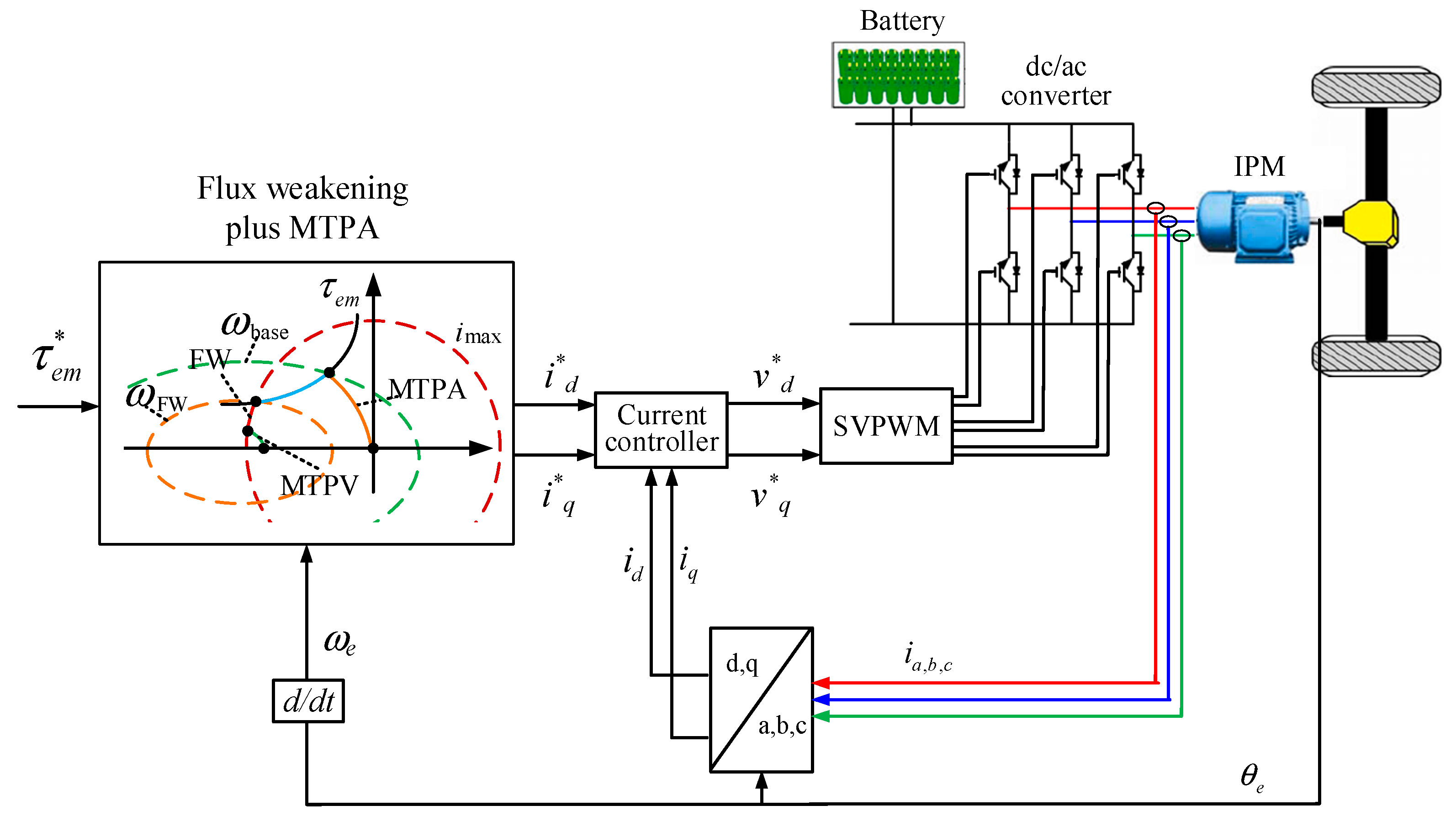
2.1. Control for IPM Motor Drives
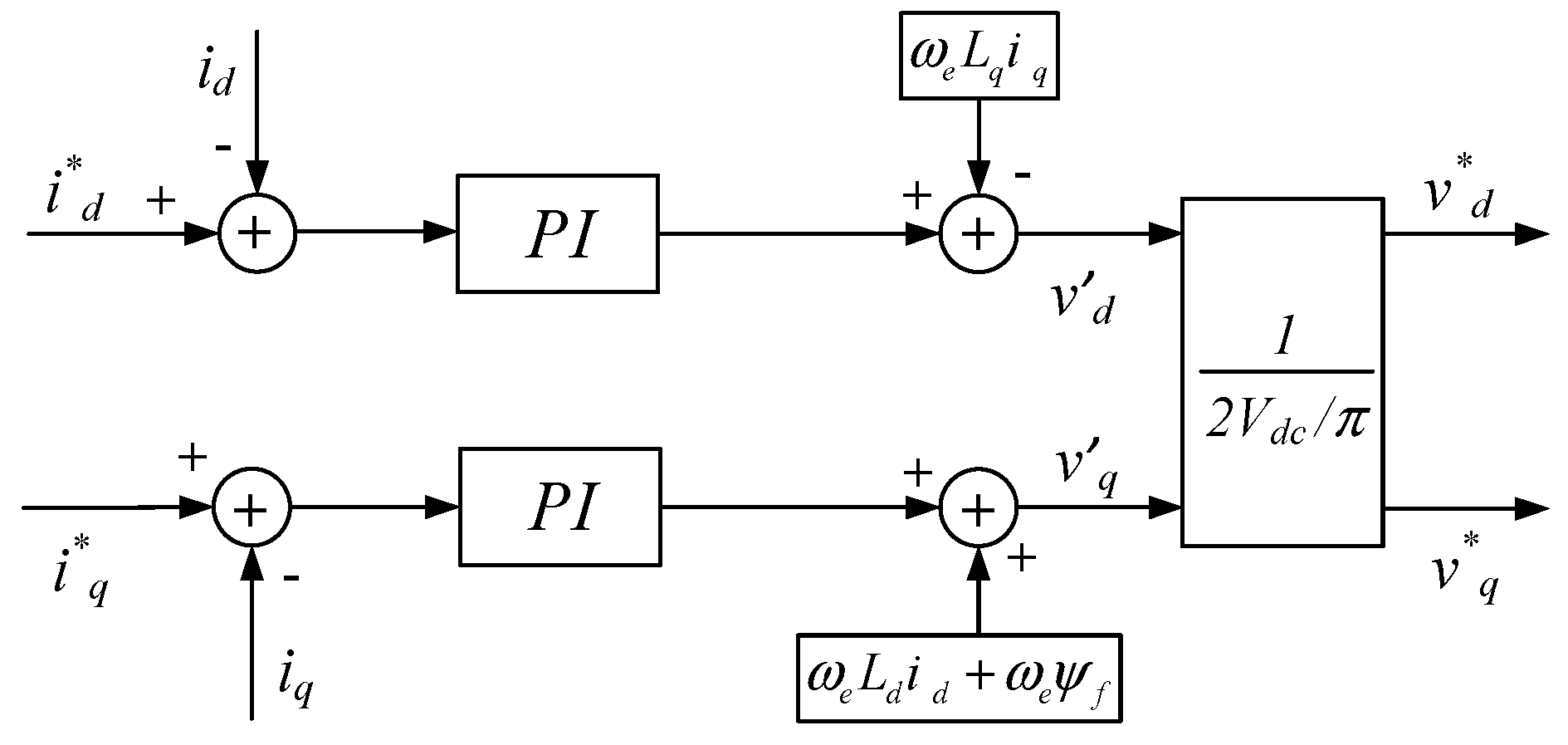
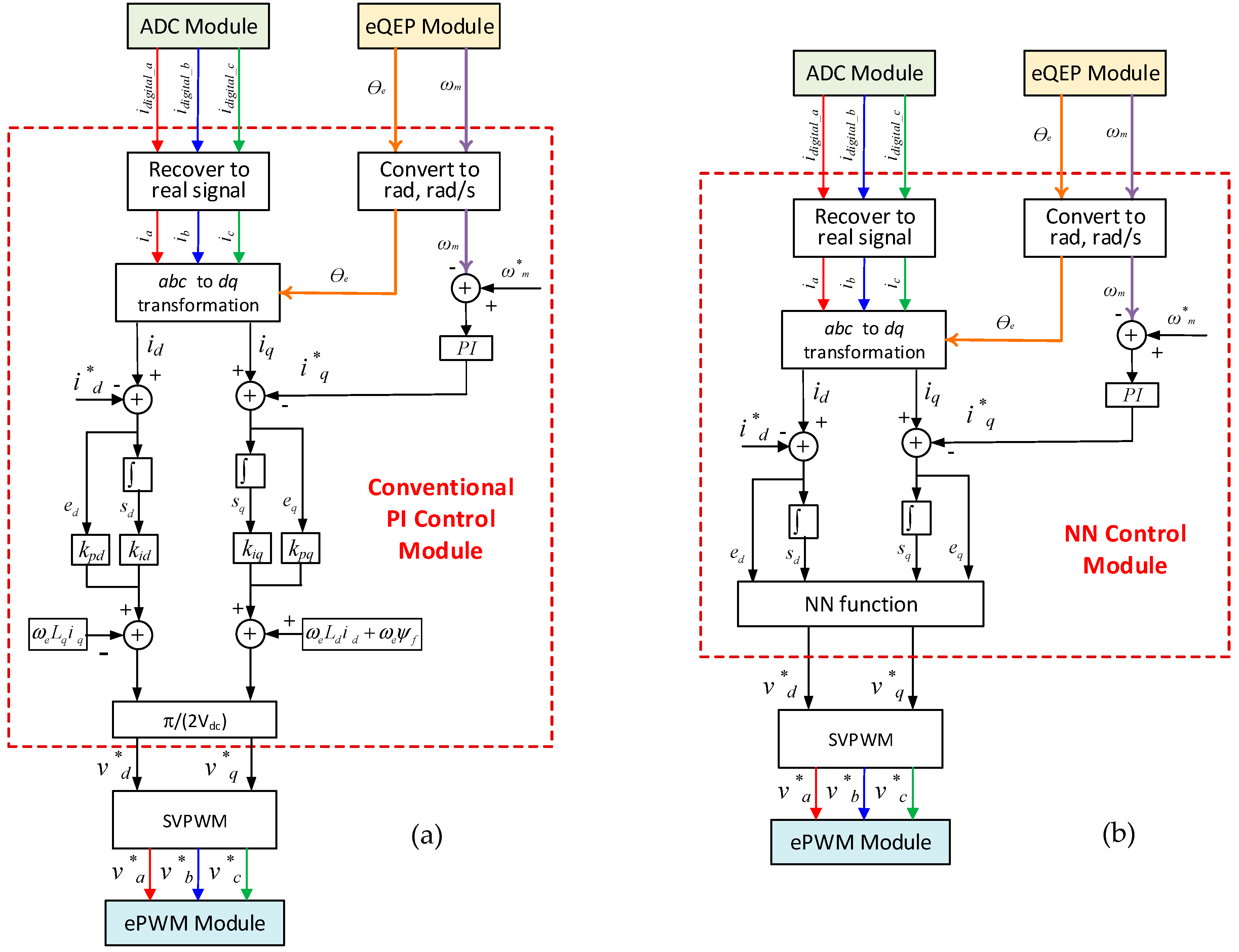
2.2. Conventional Standard Control Structure
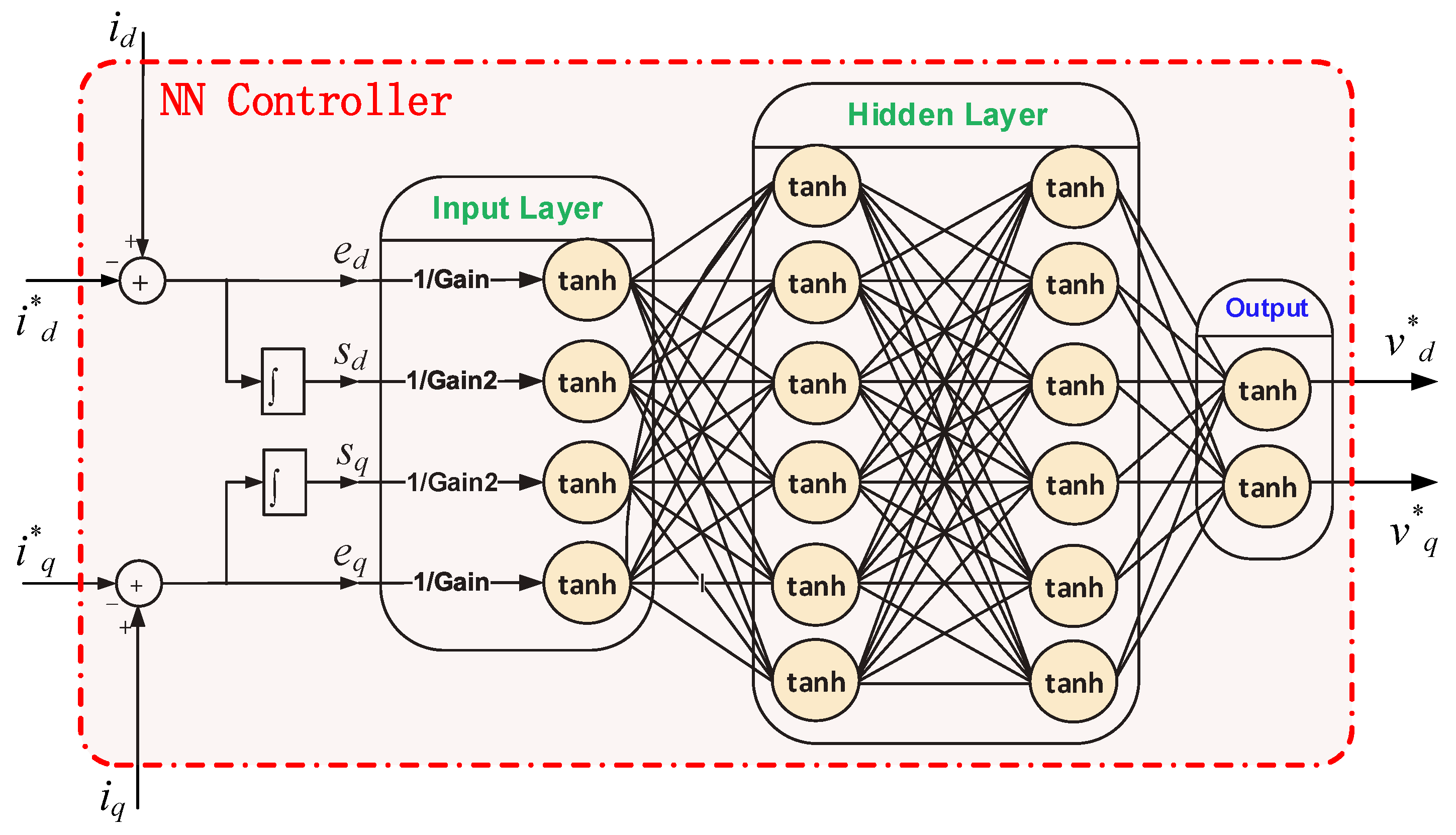
2.3. Neural Network Control Structure
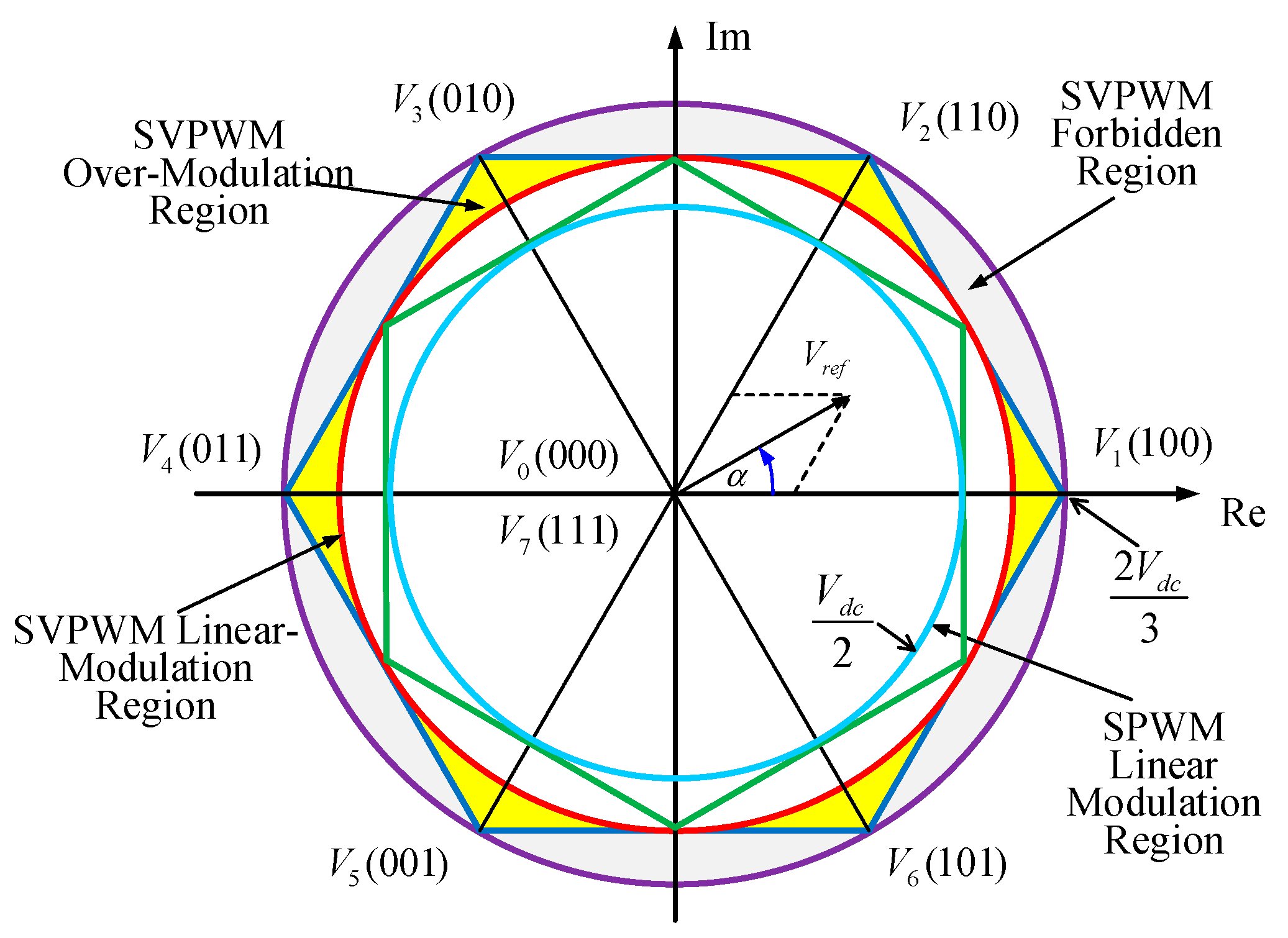
2.4. Control of IPM Motor in Linear to Over-Modulation Regions
3. Determining Controller Parameters
3.1. IPM Motor Model
3.2. Determing Parameters of Conventional Controller
3.3. Determing Parameters of NN Controller
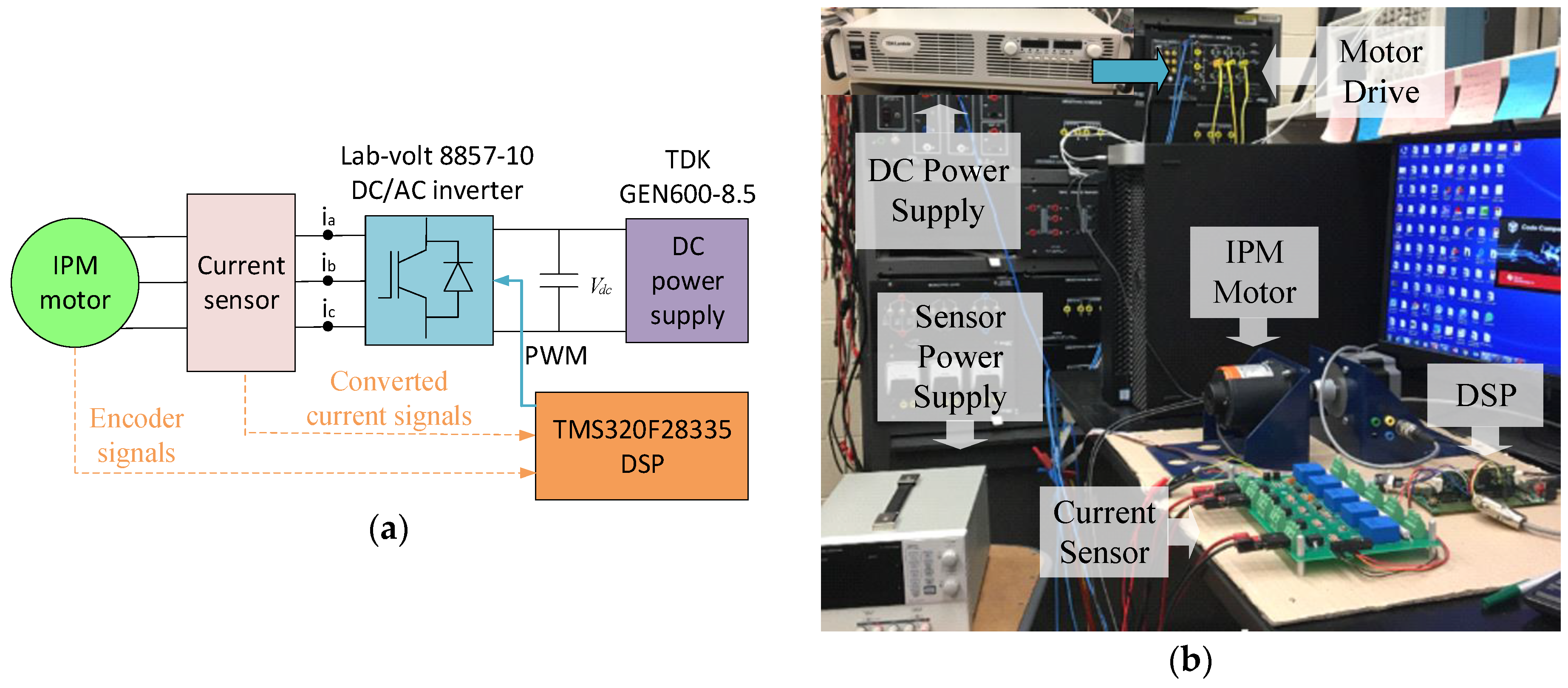
4. Building DSP-Based Microcontroller Hardware for IPM Motor Drives
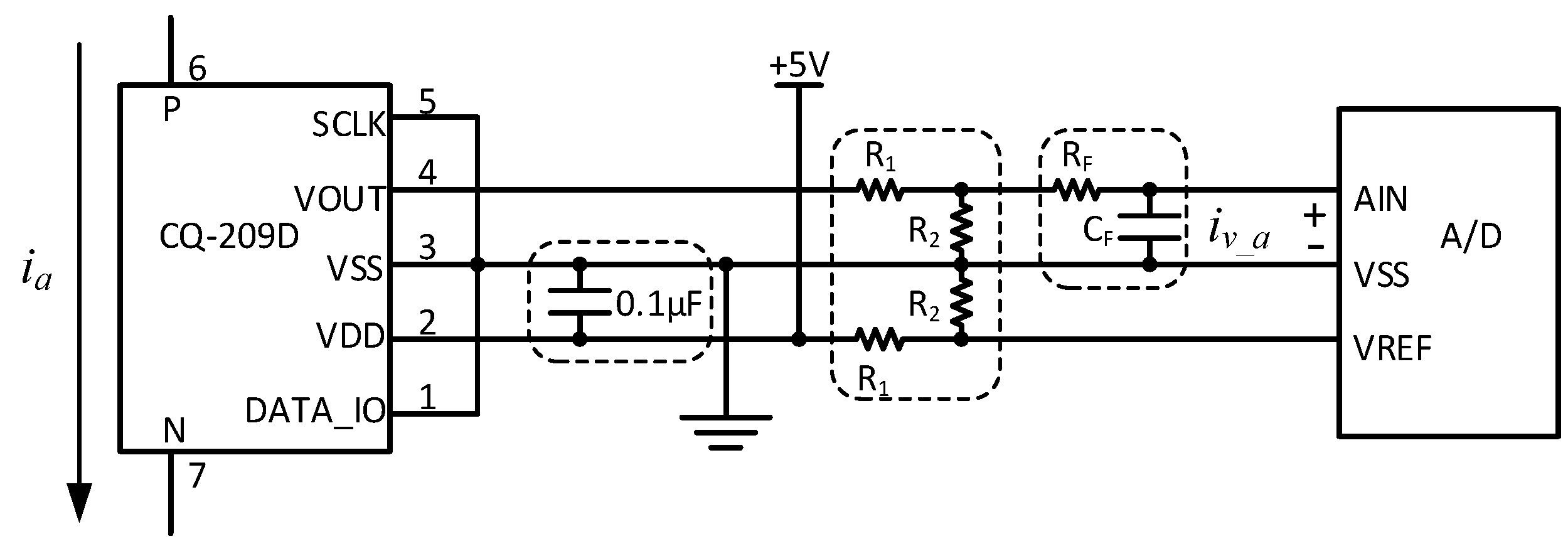
4.1. Sensor Board Design and Development
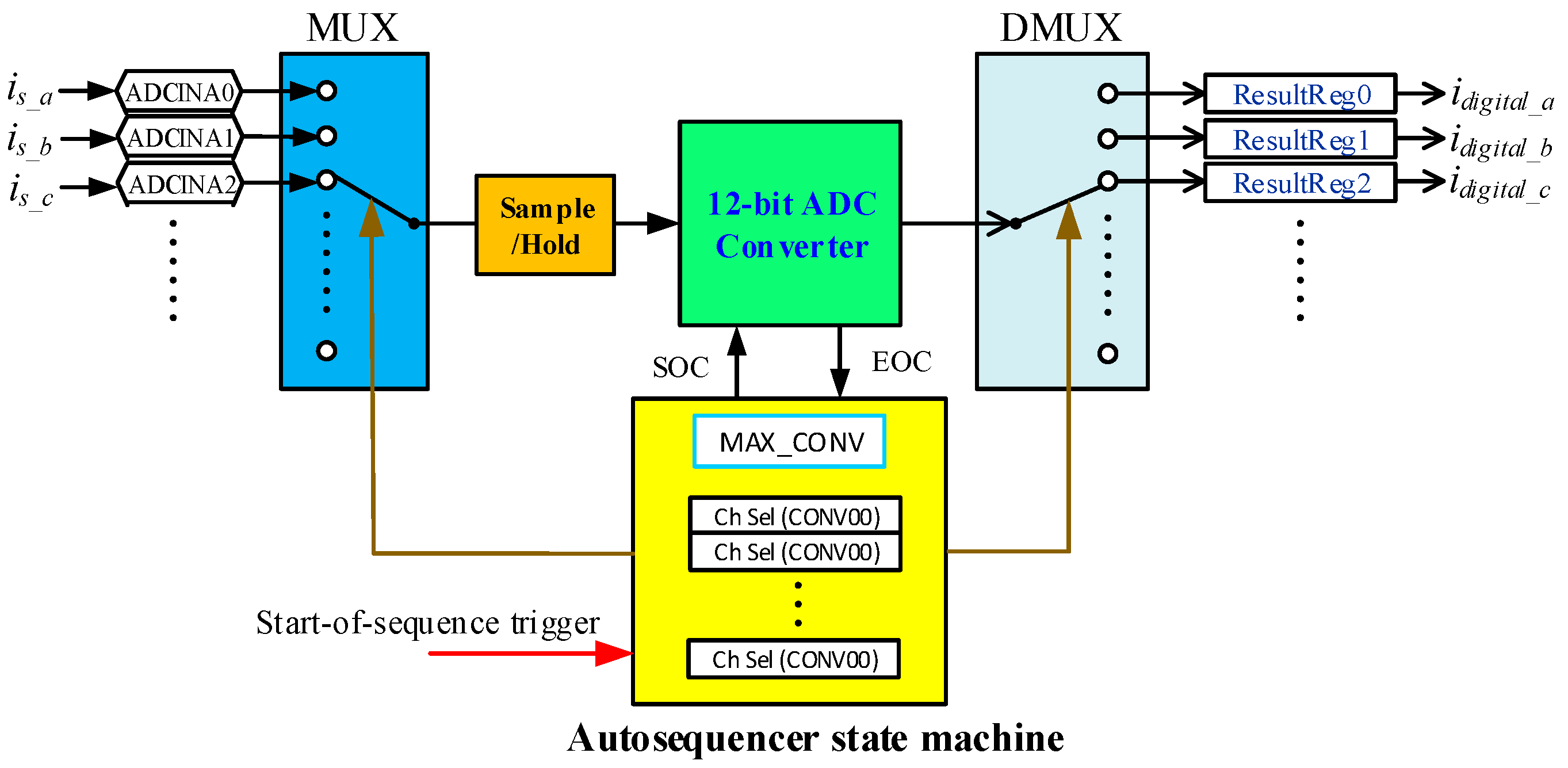
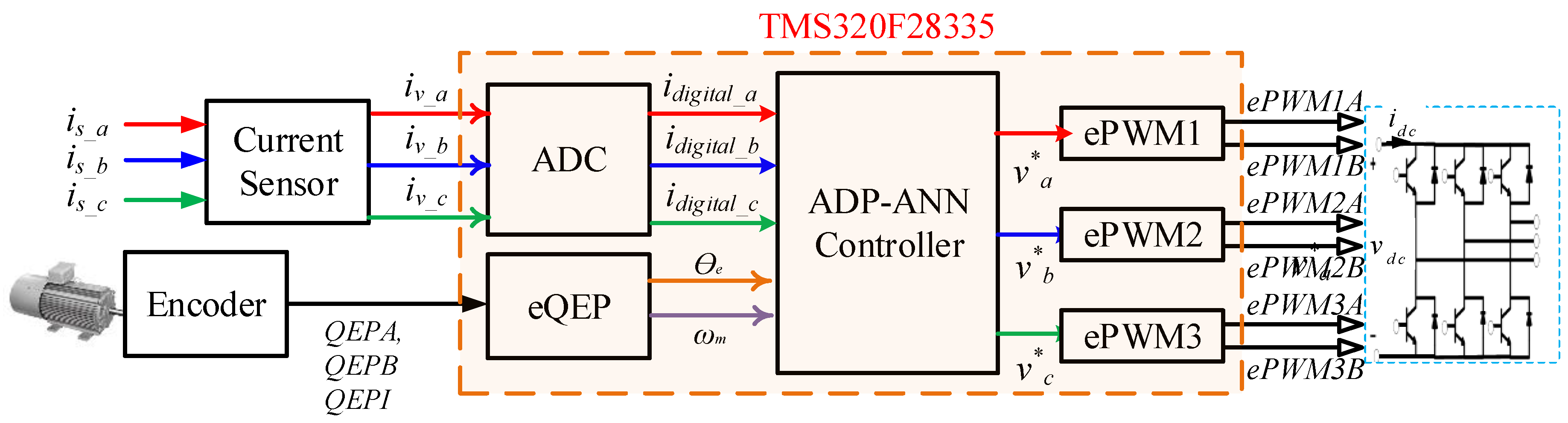
4.2. Design of TMS320F28335 DSP with IPM Motor Drives System
5. Software Implementation of DSP-Based Control Algorithm
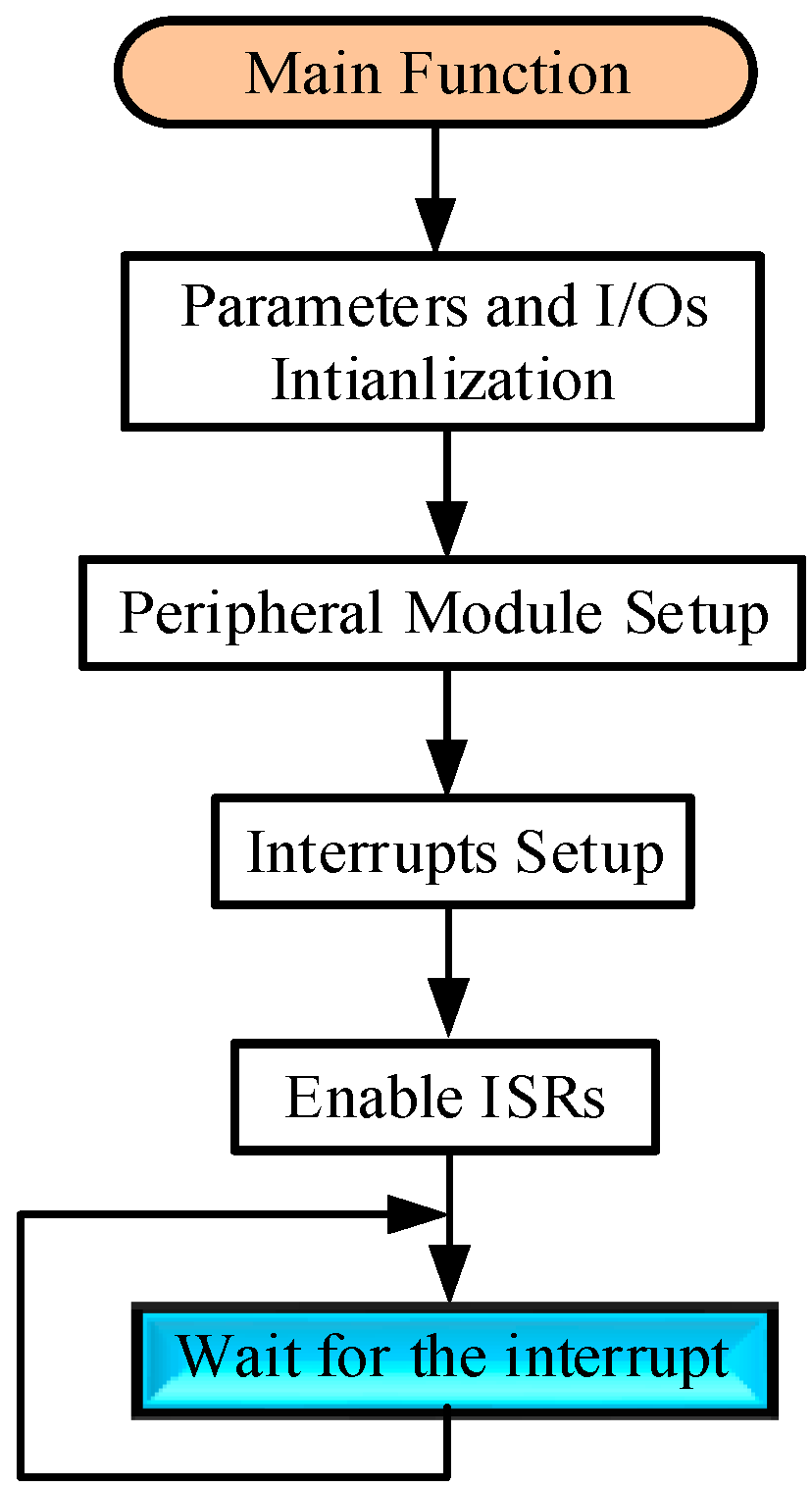
5.1. Implementation of the DSP Main Function
5.2. Implementation of PI or NN Control Module
5.3. SVPWM Implementation
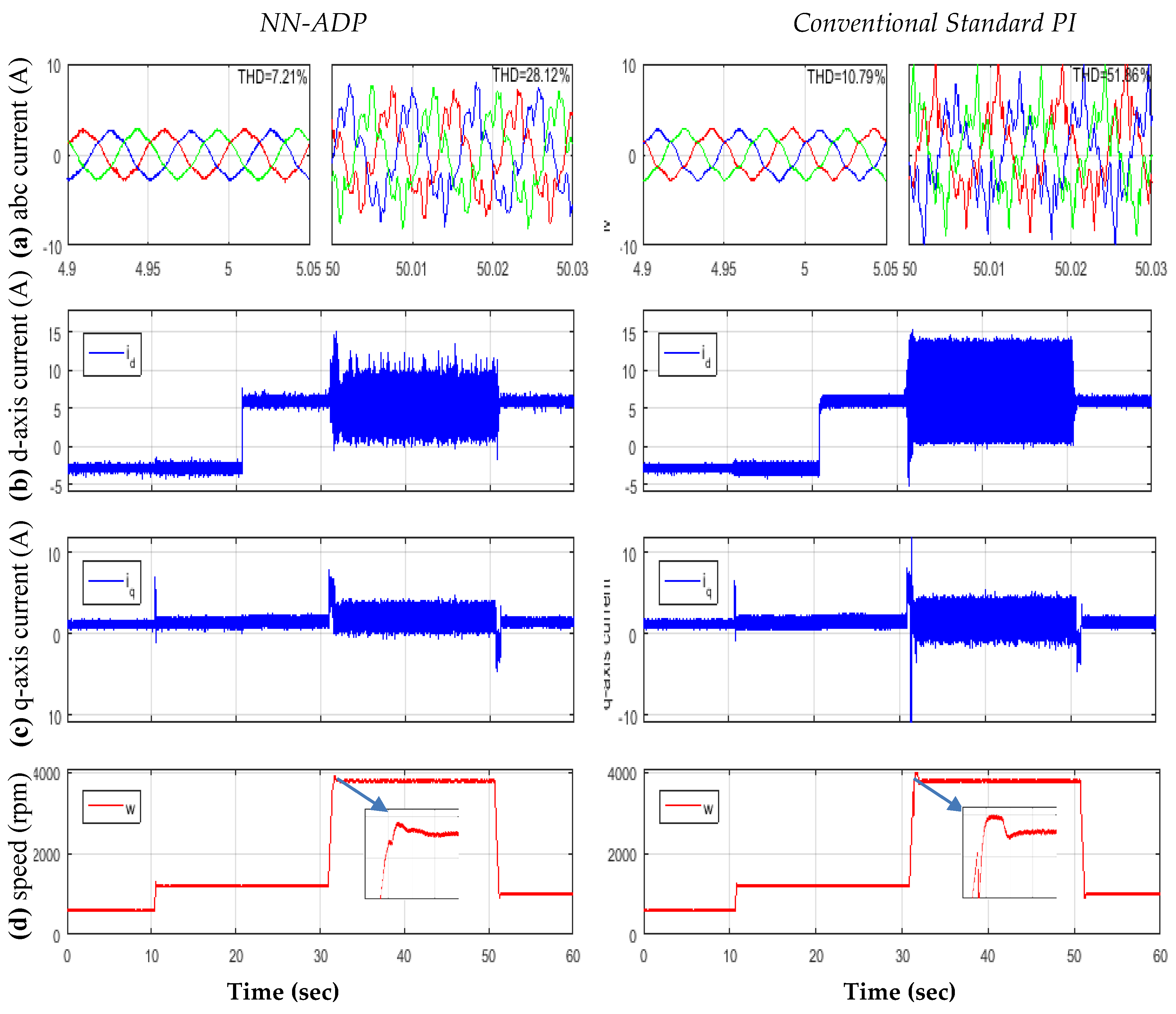
6. Experiment Results
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ankit Singh Pundir. Electric Vehicle Market—Global Opportunity Analysis and Industry Forecast, 2017–2023. Available online: https://www.alliedmarketresearch.com/electric-vehiclemarket (accessed on 21 May 2018).
- Pellegrino, G.; Vagati, A.; Guglielmi, P.; Boazzo, B. Performance comparison between surface-mounted and interior PM motor drives for electric vehicle application. IEEE Trans. Ind. Electron. 2012, 59, 803–811. [Google Scholar] [CrossRef]
- Rahman, M.A.; Masrur, M.A. Advances on IPM technology for hybrid electric vehicles. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–11 September 2009. [Google Scholar]
- Islam, M.S.; Husain, I.; Mikail, R. Slotless lightweight motor for drone applications. In Proceedings of the 2017 IEEE ECCE, Cincinnati, OH, USA, 1–5 October 2017; pp. 5041–5048. [Google Scholar]
- Zhou, K.; Wang, D. Relationship between space-vector modulation and three-phase carrier-based PWM: A comprehensive analysis. IEEE Trans. Ind. Electron. 2000, 49, 186–196. [Google Scholar] [CrossRef]
- Lee, D.; Lee, G. A novel overmodulation technique for space-vector PWM inverters. IEEE Trans. Power Electron. 1998, 13, 1144–1151. [Google Scholar]
- Liu, X.D.; Yu, H.S.; Yu, J.P. Combined Speed and Current Terminal Sliding Mode Control with Nonlinear Disturbance Observer for PMSM Drive. IEEE Access 2018, 6, 29594–29601. [Google Scholar] [CrossRef]
- Liu, J.; Li, H.; Deng, Y. Torque ripple minimization of PMSM based on robust ILC via adaptive sliding mode control. IEEE Trans. Power. Electron. 2017, 33, 3655–3671. [Google Scholar] [CrossRef]
- Wu, Y.; Li, G. Adaptive disturbance compensation finite control set optimal control for PMSM systems based on sliding mode extended state observer. Mech. Syst. Signal Process. 2018, 98, 402–414. [Google Scholar] [CrossRef]
- Kakosimos, P.; Abu-Rub, H. Predictive speed control with short prediction horizon for permanent magnet synchronous motor drives. IEEE Trans. Power. Electron. 2017, 33, 2740–2750. [Google Scholar] [CrossRef]
- Holtz, J. Advanced PWM and predictive control—An overview. IEEE Trans. Ind. Electron. 2016, 63, 3837–3844. [Google Scholar] [CrossRef]
- Li, S.; Fairbank, M.; Fu, X.; Wunsch, D.C.; Alonso, E. Vector Control of Permanent Magnet Synchronous Motor using Adaptive Recurrent Neural Networks. In Proceedings of the 2013 IEEE International Joint Conference on Neural Networks, Dallas, TX, USA, 4–9 August 2013. [Google Scholar]
- Sun, T.; Wang, J.; Koc, M. On Accuracy of Virtual Signal Injection based MTPA Operation of Interior Permanent Magnet Synchronous Machine Drives. IEEE Trans. Power Electron. 2017, 32, 7405–7408. [Google Scholar] [CrossRef]
- Sun, T.; Wang, J.; Chen, X. Maximum Torque Per Ampere (MTPA) Control for Interior Permanent Magnet Synchronous Machine Drives Based on Virtual Signal Injection. IEEE Trans. Power Electron. 2015, 30, 5036–5045. [Google Scholar] [CrossRef]
- Mohan, N.; Undeland, T.M.; Robbins, W.P. Power Electronics: Converters, Applications, and Design, 3rd ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2002. [Google Scholar]
- Modi, M.K.; Venugopal, S.; Narayanan, G. Space vector-based analysis of overmodulation in triangle-comparison based PWM for voltage source inverter. Sadhana 2013, 38, 331–358. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Yang, G.; Su, J. PWM Strategy With Minimum Harmonic Distortion for Dual Three-Phase Permanent-Magnet Synchronous Motor Drives Operating in the Overmodulation Region. IEEE Trans. Power Electron. 2016, 31, 1367–1380. [Google Scholar] [CrossRef]
- Kwon, Y.C.; Kim, S.; Sul, S.K. Six-Step Operation of PMSM With Instantaneous Current Control. IEEE Trans. Ind. Appl. 2014, 50, 2614–2625. [Google Scholar] [CrossRef]
- Mohan, N. Advanced Electric Drives—Analysis, Modeling and Control Using Simulink; Minnesota Power Electronics Research & Education: Minneapolis, MN, USA, 2001; ISBN 0-9715292-0-5. [Google Scholar]
- Ramakrishnan, R.; Islam, R.; Islam, M.; Sebastian, T. Real time estimation of parameters for controlling and monitoring permanent magnet synchronous motors. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 1194–1199. [Google Scholar]
- Jiang, Y.; Jiang, Z. Robust Adaptive Dynamic Programming and Feedback Stabilization of Nonlinear Systems. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 882–893. [Google Scholar] [CrossRef] [PubMed]
- KrishnaKumar, K.; Neidhoefer, J. Immunized Adaptive Critics for Level-2 Intelligent Control. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Orlando, FL, USA, 12–15 October 1997; pp. 856–861. [Google Scholar]
- Venayagamoorthy, G.K.; Harley, R.G.; Wunsch, D.C. Comparison of Heuristic Dynamic Programming and Dual Heuristic Programming Adaptive Critics for Neurocontrol of a Turbogenerator. IEEE Trans. Neural Netw. 2002, 13, 764–773. [Google Scholar] [CrossRef] [PubMed]
- Fu, X.; Li, S.; Fairbank, M.; Wunsch, D.C.; Alonso, E. Training recurrent neural networks with the Levenberg-Marquardt algorithm for optimal control of a grid connected converter. IEEE Trans. Neural Netw. Learn. Syst. 2014, 26, 1900–1912. [Google Scholar] [CrossRef] [PubMed]
- MotorSolver. 4 Pole IPM Type PM-AC Synchronous Motor Used for University Teaching Lab Dyno-Kits. Available online: http://motorsolver.com/wp/wp-content/uploads/2015/03/9-PRIUS-4POLE-IPM-SPECS-small.pdf (accessed on 16 January 2018).
- Hwang, M.H.; Han, J.H.; Kim, D.H.; Cha, H.R. Design and Analysis of Rotor Shapes for IPM Motors in EV Power Traction Platforms. Energies 2018, 11, 2601. [Google Scholar] [CrossRef]
- Texas Instruments. TMS320C28x Extended Instruction Sets Technical Reference Manual. Available online: http://www.ti.com/lit/ug/spruhs1a/spruhs1a.pdf (accessed on 15 October 2018).
- AKM Semiconductor Inc. CQ-209A: High-Speed Small-Sized Current Sensor. Available online: https://www.akm.com/akm/en/file/datasheet/CQ-209D.pdf (accessed on 15 October 2018).
- Texas Instruments. TMS320x2833x Analog-to-Digital Converter (ADC) Module Reference Guide. Available online: File:///C:/Users/student/Downloads/2260.TI_TMS320x2833x%20Analog-to-Digital%20Converter%20(4).pdf (accessed on 15 October 2018).
- Texas Instruments. TMS320x2833x, 2823x Enhanced Quadrature Encoder Pulse (eQEP) Module Reference Guide. Available online: http://www.ti.com/lit/ug/sprug05a/sprug05a.pdf (accessed on 15 October 2018).
- Mohamadian, M.; Nowicki, E.; Ashrafzadeh, F.; Chu, A.; Sachdeva, R.; Evanik, E. A novel neural network controller and its efficient DSP implementation for vector-controlled induction motor drives. IEEE Trans. Ind. Appl. 2003, 39, 1622–1629. [Google Scholar] [CrossRef]
- Berndt, B.C.; Gesztesy, F. Continued Fractions: From Analytic Number Theory to Constructive Approximation; American Mathematical Society: Providence, RI, USA, 1999. [Google Scholar]
- Huynh, T.A.; Hsieh, M.F. Performance Analysis of Permanent Magnet Motors for Electric Vehicles (EV) Traction Considering Driving Cycles. Energies 2018, 11, 1385. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Hardware | Units |
|---|---|---|
| Rated Power | 0.24 | kW |
| dc voltage | 35 | V |
| Nominal Torque | 0.84 | Nm |
| Maximum Speed | 3800 | RPM |
| Permanent magnet flux | 0.01544 | Wb |
| Inductance in q-axis, Lq | 1.07 | mH |
| Inductance in d-axis, Ld | 1.36 | mH |
| Stator copper resistance, Rs | 0.1354 | Ω |
| Inertia | 0.00004 | kg⋅m2 |
| Friction coefficient | 0.001 | N·m·s/rad |
| Pole pairs | 2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Li, S.; Ramezani, M.; Balasubramanian, B.; Jin, B.; Gao, Y. DSP Implementation of a Neural Network Vector Controller for IPM Motor Drives. Energies 2019, 12, 2558. https://doi.org/10.3390/en12132558
Sun Y, Li S, Ramezani M, Balasubramanian B, Jin B, Gao Y. DSP Implementation of a Neural Network Vector Controller for IPM Motor Drives. Energies. 2019; 12(13):2558. https://doi.org/10.3390/en12132558
Chicago/Turabian StyleSun, Yang, Shuhui Li, Malek Ramezani, Bharat Balasubramanian, Bian Jin, and Yixiang Gao. 2019. "DSP Implementation of a Neural Network Vector Controller for IPM Motor Drives" Energies 12, no. 13: 2558. https://doi.org/10.3390/en12132558
APA StyleSun, Y., Li, S., Ramezani, M., Balasubramanian, B., Jin, B., & Gao, Y. (2019). DSP Implementation of a Neural Network Vector Controller for IPM Motor Drives. Energies, 12(13), 2558. https://doi.org/10.3390/en12132558