1. Introduction
Global warming caused by greenhouse gas emissions has aroused worldwide concern. In fact, the world’s energy demand is currently growing sharply and the problem of the fossil fuel depletion is becoming increasingly crucial: more than 25 billion tons of CO
2 arising from worldwide human activities is released annually into the atmosphere. As depicted in [
1], to achieve the requirements of the European directives regarding air quality, the emission inventories are becoming more and more important in order to achieve the requirements of the European Directives regarding air quality. A collection of algorithms are proposed in [
2] to estimate the emission inventory from road transport in Campania, Italy. In the emission inventory, a large portion of emitted greenhouse gas comes from the internal combustion engines of motor vehicles, significantly degrading the air quality and threatening our health. It is urgent to develop new technologies and change from conventional fuel to biofuel efficiently, both to meet the energy demands and to limit the production of carbon dioxides.
Due to the environmental benefits and high-energy efficiency, electric vehicles have been enjoying a wide prevalence from academia, the automotive industry, and governmental organizations. A plug-in hybrid-electric vehicle (PHEV), equipped with both a battery driven motor and an internal combustion engine, is more preferable as an urban green transport mode, because it is able to travel a long distance while reducing fuel consumption [
3]. However, the increasing use of PHEVs may challenge the operation of power systems, in which the uncoordinated charging of PHEVs limits the capacity supply and aggravates the current peak load, resulting in potential security issues [
4].
Fortunately, with the advancements of smart metering and communication technologies, effective algorithms focusing on controlling the timing and rate of PHEV charging have been widely studied, which is commonly called demand-side management (DSM) [
5]. DSM refers to techniques that take into account the electricity consumption patterns of end-use consumers to match the current supply capacity of the power system or to forecast future supply capabilities [
6]. DSM is undoubtedly an important part of the power distribution system, since it takes full advantage of the existing infrastructure to enhance the stability of the power load and achieve a low-cost for the vehicle owners in the system.
A number of studies have applied DSM to schedule the charging of PHEVs, which can fulfill a wide range of goals. A demand response strategy is proposed in [
7] for coordinated charging of a group of PHEVs in parking lots, which effectively alleviates the potential new load peaks of the transformers in residential distribution networks. In [
8,
9], the decentralized charging control schemes are proposed to achieve valley filling, i.e., shifting the controllable PHEV load to less congested hours, while satisfying the requirements of vehicle owners. A game-based approach is proposed in [
10] for coordinated charging of PHEVs. Their results show that a socially optimal equilibrium can be obtained by the proposed game and the grid optimizes its price while the vehicle owners choose their equilibrium strategies. Nevertheless, these novel schemes proposed in [
7,
8,
9,
10] focus on a single control objective for coordinated charging of PHEVs: either shifting the power load or minimizing the owners’ costs. Since the load-shifting service and economic issues are not taken into account at the same time, these schemes cannot guarantee minimum fluctuation performance and economic satisfaction for a power distribution system simultaneously.
Since a power distribution system tightly integrates the energy providers with a large population of flexible loads, it is reasonable and preferable to consider multiple control objectives for the power distribution system, involving providing load-shifting services and achieving total cost minimization. In [
11], based on a forecast of future electricity prices, dynamic programming is applied to achieve the optimal solution which considers an optimal charge curve and minimum expense at the same time. However, the optimal controller developed in [
11] will not necessarily lead to a stable system. The authors of [
12] formulate the load scheduling of PHEVs as a multi-objective constrained optimization problem with the stability of the power system considered, and a weight aggregation multi-objective particle swarm optimization (WA-MOPSO) is presented to reach the optimal solution in a smart grid scenario. However, the algorithm they propose requires each vehicle to report its local information, such as battery levels and exit times, to a central optimal controller, so its implementation requires high computation capability and may not be feasible in a large-scale network. Following the trend of distributed schemes, an augmented-constraint method is presented in [
13] to achieve the optimal solution in a distributed manner, with an auxiliary service of shifting load and economic issues taken into account. Nevertheless, [
13] does not consider the random arrival and departure of PHEVs, thus it is not applicable for situations where vehicle owners may arrive and leave at will.
Considering the lack of effective and practical schemes for coordinated charging of PHEVs in the power distribution system, this paper aims to solve the problem of valley filling and achieve an economically optimal solution in a distributed manner, subject to the target state-of-charge (SOC) requirements and system’s technical constraints. Compared with existing works, the innovative contributions of this paper are summarized as follows:
- (1)
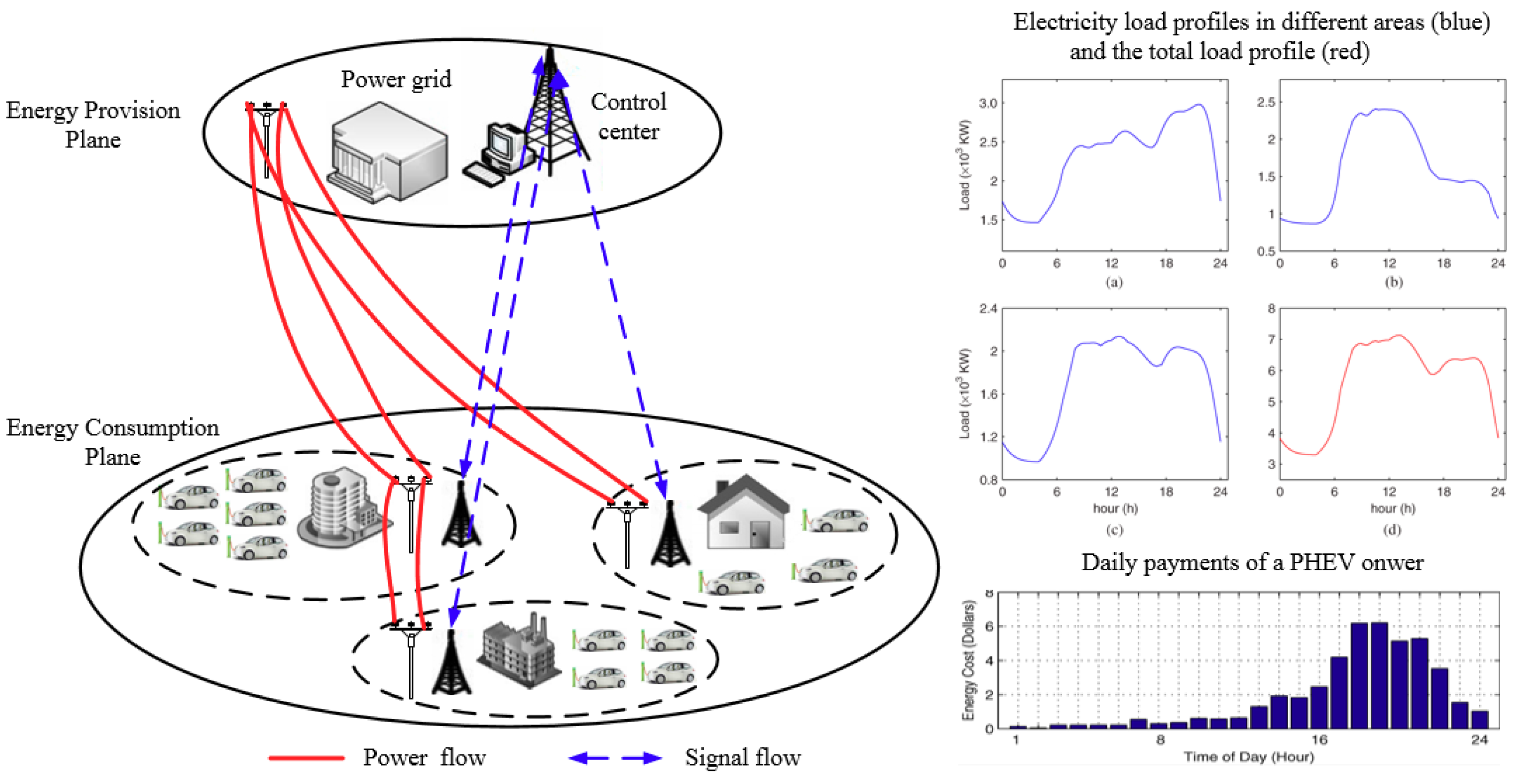
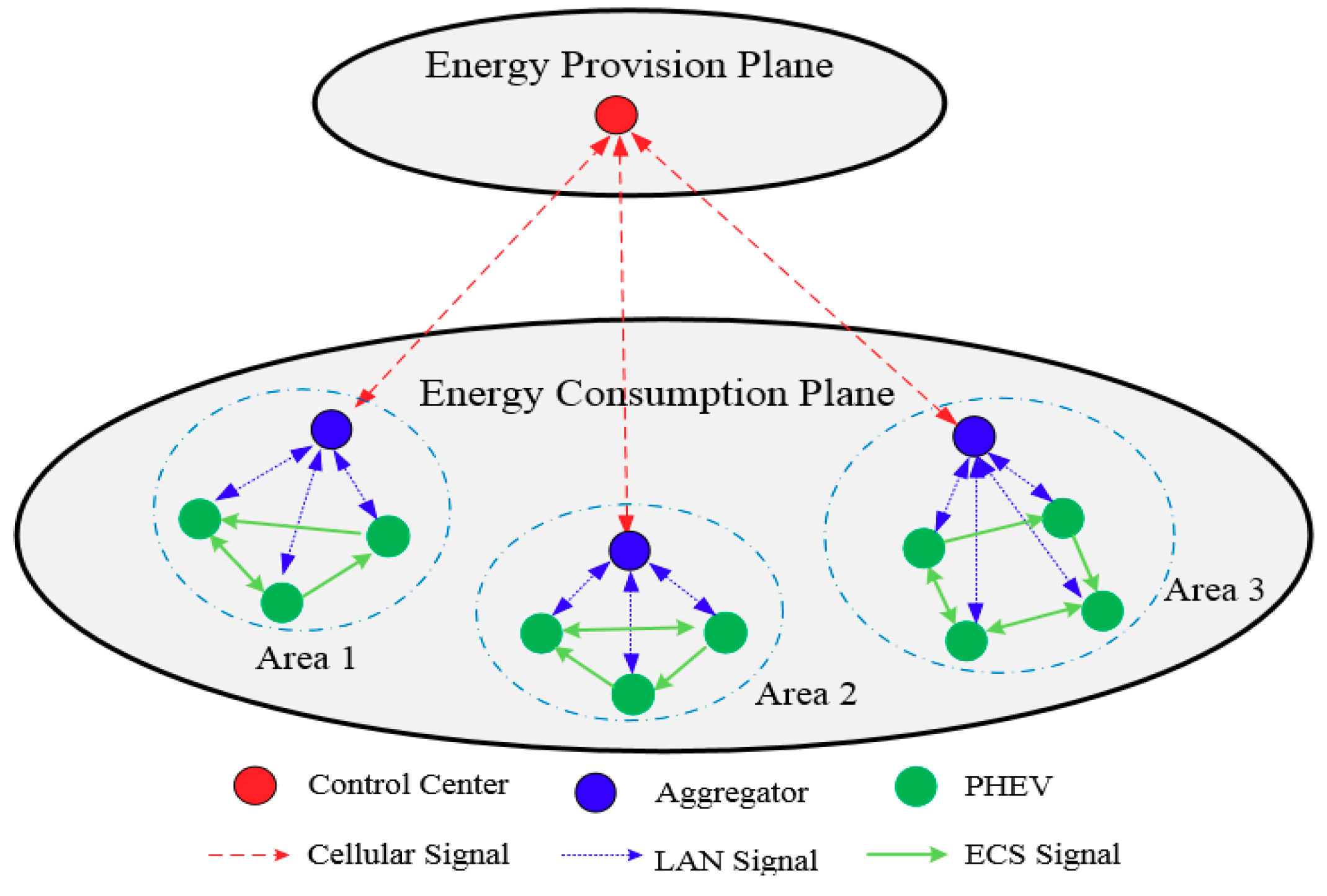
A multi-level framework of the power distribution system integrating the physical power grid with a heterogeneous information network is established for coordinated charging of PHEVs.
- (2)
A model of multi-objective constrained optimization with priority is employed to formulate the PHEV charging scheduling problem in the multi-level power distribution system. In detail, the objectives of enabling valley filling with a higher priority and achieving total cost minimization with a lower priority are both investigated under the system’s constraints.
- (3)
A hierarchical optimal algorithm combining the water-filling-based algorithm with the consensus-based method is proposed to solve the constrained optimization problem. In addition, a moving horizon method is adopted to address the random arrival and departure of PHEVs, and it is convenient to implement in the multi-level power distribution system.
The rest of this paper is organized as follows.
Section 2 presents the system model, involving the multi-level framework of a power distribution system, heterogeneous information network and PHEV charging model. Problem formulation is given in
Section 3. In
Section 4, our main results are shown, including the primal problem transformation, hierarchical algorithm, convergence analysis, and hierarchical algorithm with moving horizon. Numerical simulations are given in
Section 5.
Section 6 gives the conclusion and states future work.
3. Problem Formulation
In this paper, we focus on a multi-objective coordinated charging scheme of PHEVs that allows certain desired capabilities of the aggregate load both on the power grid and the vehicle owners. In detail, the multiple objectives are performed with different priorities. From the view of the energy provider, it is aimed at stabilizing the power load with a higher priority via controlling the aggregated power for PHEV charging based on the electricity demands. On the basis of that, the total minimum cost of a group of PHEVs in an area is achieved with a lower priority by optimally allotting the aggregated power, while satisfying their charging requirements by the specified time.
We shall assume that the vehicle owners are willing to participate in the coordination of their energy usage provided that they are provided with sufficient incentives such as less payments. Suppose that there are
n PHEVs in a set
V of an area, and the charging horizon is evenly divided into
time slots, denoted by
. For PHEV
, the charging vector is defined as
where
is the
i-th PHEV charging power at time
k. The charging cost of buying an
unit of energy from the power grid is denoted by
as
with
and
,
. For simplicity of expression, an equivalent function is used in this paper as
with constants
,
and
. The corresponding incremental function of
is
For the objectives with different priorities, if
has a higher priority than
, then we express it as
The coordinated charging problem of PHEVs in the multi-level power distribution system is formulated as follows.
Constraints
- -
Inequality constraints on
as
- -
Equality constraints on
as
- -
Inequality priority constraint on objectives as
where
is the ideal flat power curve;
is the base electricity demand of an area that is known to the aggregator;
is the maximum charge power of the
i-th PHEV and
bi is the charging requirement of the
i-th PHEV set by the owner, which should be satisfied at the end of charging.
The vehicle owner intends to charge their vehicle from initial SOC
to target SOC
. From Equation (3), it can be inferred that
Since the cost function
denotes the fluctuation between the total demand curve and the ideal flat power curve. It is verified that
if and only if the aggregate power curve is flat over
k, and
is given by
Remark 1. In the multi-objective optimization problem (8)–(11), we are motivated by the constraints on objectives with priority to deal with single-objective optimization problems with different priorities under the system’s constraints. When onlyoris considered, the constraint shown in Equation (11) becomes redundant, making Equations (8)–(11) easier to solve.
4. Main Results
In this section, we give a transformation for the problem (8)–(11) based on the priorities of objective functions. Then we propose a hierarchical optimal algorithm to solve the transformed problem, and present the convergence analysis for our algorithm. Finally, a practical case is considered, in which PHEVs arrive and leave randomly and the hierarchical algorithm with a moving horizon method is developed.
4.1. Primal Problem Transformation
Based on the priorities of the objective functions, we transform the problem (8)–(11) into two single-objective optimization problems. First, we aim to shift the load demand by controlling the aggregated power for PHEVs charging in the area. Then we focus on achieving the total minimum cost for the vehicle owners in the area by optimally allotting the aggregated power for each vehicle, while satisfying their charging requirements by the specified time.
From the equality constraints (Equation (10)), we have
which is equivalent to
Let
dk denote the aggregated power provided for PHEVs charging in the area at time
as
Thus the problem (8)–(11) can be transformed into the optimal load-shifting problem as
and the operation cost minimization problem as
where
and
are the optimization variables of Equations (18) and (19), respectively.
Remark 2. The transformed single-objective optimization problems (18) and (19) differ from the primal problem (8)–(11) both in the optimization variables and the constraints. The inequality priority constraints on objectives are absent due to the introduction of the variable, making the problems (18) and (19) easier to solve than the primal problem. It is reasonable to expect that the objective in problem (18) with higher priority also has a higher level of satisfaction than that in problem (19).
4.2. Hierarchical Algorithm
Now we present our hierarchical optimal algorithm, combining the water-filling-based algorithm with the consensus-based method to solve problems (18) and (19).
4.2.1. Water-Filling-Based Algorithm
First, we apply the water-filling-based algorithm to solve the optimal load shifting problem (18). Let
,
and
. Following the Lagrangian multiplier method, for the optimal load-shifting problem (18), the Lagrange function can be constructed as
where the first term is the objective function of Equation (18); the second term is designed to satisfy the equality constraint in Equation (18) by introducing the Lagarange multiplier
, and the constant of 2 in Equation (20) is designed for convenience. By differentiating Equation (20) with respect to
and setting the result to be zero, we have
The equipower level [
18], is denoted by
and is independent of
k. Equation (21) is rewritten as
It should be pointed out that Equation (22) is obtained from the constructed Lagrange function (20) by differentiating Equation (20) with respect to
. The equipower level
is a constant which is set as
in the initialization. Moreover, the optimality condition (22) does not take into account the inequality constraint
. If this constraint is taken into account, Equation (22) becomes the following: there exists an equipower level constant
δ such that either Equation (22) holds or
or
The water-filling-based algorithm is presented in Algorithm 1. In Algorithm 1,
is the projection operation designed to confine
dk in the interval
, that is
| Algorithm 1. Water Filling for Load Shifting Problem |
Input: and
Output: and ,
1. Initialize and
2. while do
3. Choose
4. Compute ,
5. if then
6. set
7. else if then
8. set
9. end if
10. end while |
Remark 3. Algorithm 1 is interpreted based on the water-filling-based algorithm which is applied to the case of a single PHEV in a smart grid scenario [18]. However, our work is quite different from [18] in terms of both optimization variables and constraints. In addition, the control center computes and communicates with the aggregator at each time slot, so is not required to be computationally powerful, as the computational burden will be evenly shared by each time slot in the multi-level power distribution system. 4.2.2. Consensus-Based Method
The consensus-based method is proposed in our previous work [
19], which only requires local information and all nodes merely communicate with their neighbors to solve a dynamic resource allocation problem. The definition of the updated variables (i.e.,
,
, and
) for iteration can be referred to [
19]. We apply this method to solve problem (19) which is interpreted as follows.
Step 1: Initializing the variables to be updated through the Equation (26).
Step 2: Let each PHEV i at time slot k in the area have its own copy of the Lagrange multiplier to satisfy the equality aggregated power constraint in problem (19). Then we update such that () reaches consensus according to the consensus-based iteration (27).
Step 3: Let each PHEV i have a dual multiplier which is used to satisfy the equality charging requirement constraint in problem (19), and update the dual multiplier according to the consensus-based iterations (28).
Step 4: Each PHEV i at time slot k update its estimated value according to the nonlinear projection (Equation (28)), mapping to the interval to satisfy the inequality state constraints in problem (19).
Step 5: Due to the nonlinear projection map, the estimated vector at each step may not be a feasible solution to problem (19). To overcome this issue, let each PHEV i at time slot k be associated with a surplus variable to temporarily store the resulting deviation. Then update which will be averaged among its neighbors such that will vanish gradually.
These ideas are summarized in Algorithm 2.
Remark 4. Algorithm 2 is distributed due to the fact that the algorithm only requires local information from its neighbors in an area. That is the i-th PHEV at time slot k receivesandfrom its in-neighbors, and sendsandto its out-neighbors. This means all the items in Algorithm 2 can be obtained in a distributed way.
Remark 5. The proposed hierarchical algorithm combines the water-filling-based algorithm and the consensus-based optimization method together. The transformed single-objective optimization problems (18) and (19) can be solved successively and efficiently by the hierarchical algorithm, in which the optimal solution to problem (18) is used for solving problem (19), and its implementation is convenient in the multi-level power distribution system.
| Algorithm 2. Consensus-Based Method for Cost Minimization Problem |
Input: and
Output:
1. Initialize all variables with
2. for do
3. for do
4. Every PHEV computes , , by
5. end for
6. for do
7. PHEV computes by solving
8. PHEV computes , , by
9. end for
10. for do
11. Every PHEV computes , , by
12. end for
13. if then
14. set
15. else if then
16. break
17. end if
18. end for |
4.3. Convergence Analysis
In this subsection, the convergence analysis of the proposed hierarchical algorithm is given.
Theorem 1. The solution to the multi-objective optimization problem (8)–(11) given by the hierarchical algorithm is optimal whenandis sufficiently small.
The proof of Theorem 1 is divided into two steps. First, we prove that the solution to problem (18) is optimal when using the water-filling-based algorithm. After that, we prove that the solution to problem (19) is optimal using the consensus-based method if is sufficiently small. Lemma 1 is about the solution to problem (18) is optimal using water-filling-based algorithm for a single PHEV.
Lemma 1. The optimal solution to problemis given bywhereis the optimization variable representing the charging power of a single PHEV;is the base demand;is the ideal flat power curve;is the charging requirement of the PHEV over N-period charging horizon;is the optimal solution to the problem (31);is the optimal Lagrange multiplier, andis Proof of Lemma 1. See the proof of Lemma 1 in [
20]. □
Comparing the problems (18) and (31), both on optimization variable and constraints, it is verified that the solution to problem (18) is optimal using the water-filling-based algorithm when
. Lemma 2 is about the optimal consensus-based iteration for dynamic resource allocation over strongly connected topology [
19].
Lemma 2. The consensus-based algorithm is stable and all the variables converge to the optimal solution if the positive constantis sufficiently small.
Proof of Lemma 2. See the proof of Theorem 1 in [
19]. □
Now we give the proof of Theorem 1.
Proof of Theorem 1. The multi-objective optimization problem (8)–(11) is transformed into two sub-optimizations, problems (18) and (19), following the objective functions’ priorities. From Lemma 1, we conclude that the solution to problem (18) given by Algorithm 1 is optimal when . After Algorithm 1 converges, the solution to problem (19) given by Algorithm 2 is optimal when is sufficiently small following Lemma 2. This establishes Theorem 1. □
Remark 6. Due to the fact that the solution to problem (18) is used for solving problem (19), we point out that the solution to problem (19) given by Algorithm 2 is optimal based on the optimal solution to problem (18) given by Algorithm 1.
4.4. Hierarchical Algorithm with Moving Horizon
The proposed hierarchical algorithm assumes that all PHEVs have the same entry and exit times in an area, which may be unrealistic in practice. In this subsection, we consider a practical case where PHEVs can arrive and leave randomly. A moving horizon method is adopted to deal with this case. A moving horizon method means that only the first control sample will be implemented after computation of the optimal control sequence. Then the horizon is shifted one sample and the optimization is restarted with new information of the measurements subsequently.
To this end, a hierarchical algorithm with moving horizon is proposed. The optimal load-shifting problem (18) and the operation cost minimization problem (19) need some adjustments on objective function in this case as
and
where
is the present time of the optimization start;
and
is the charging horizon of the
i-th PHEV at time slot
in the area.
is set to zero if PHEV
i does not arrive. Not until a new PHEV arrives with a late entry time can
change. Denoted by
the ideal flat power curve at time
in the group is given by
The hierarchical algorithm with moving horizon method is presented in Algorithm 3.
| Algorithm 3. Hierarchical Algorithm with Moving Horizon Method |
Input:, and
Output:
1. while 1 do
2. Compute
3. Do Algorithm 1 and Algorithm 2 based on the given
4. Get
5. Set
6. end while |
Remark 7. Algorithm 3 is designed for solving Equations (34) and (35) online, in which the result is optimal in the sense for a given Ki. In Algorithm 3,is updated at each time slot k in the group theoretically. To reduce computational burden,is updated when another PHEV arrives with a later time in practice.
6. Conclusions and Future Work
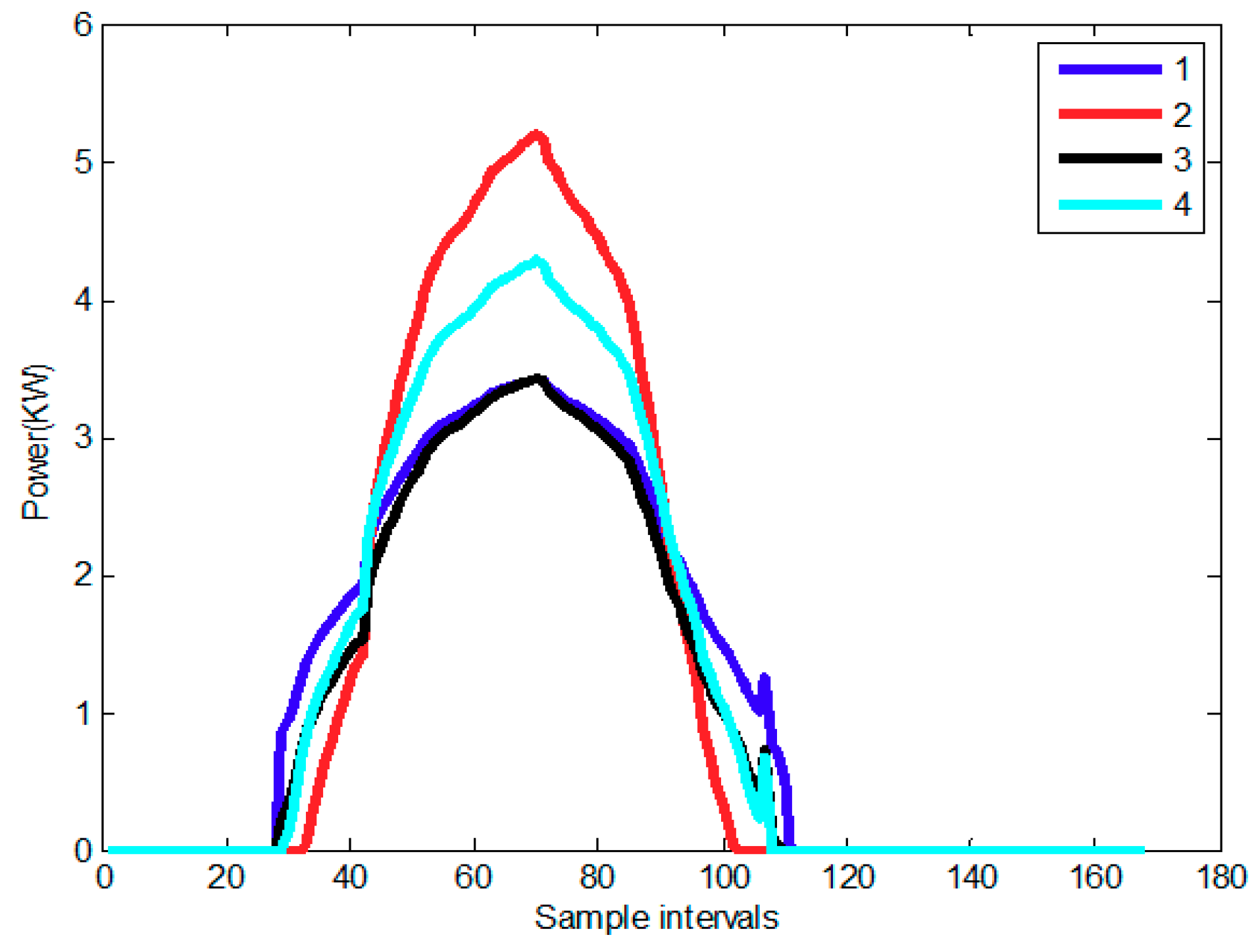
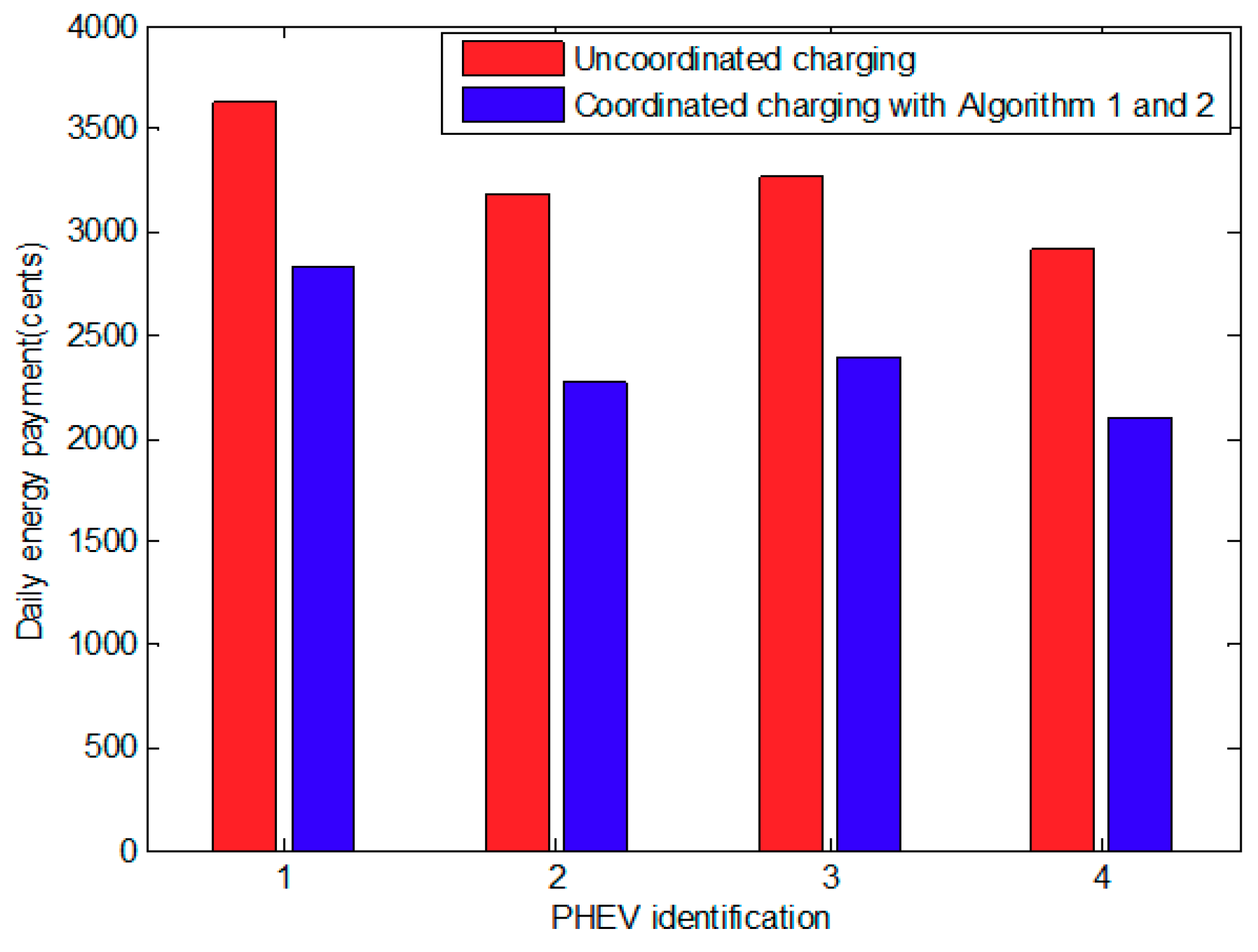
In this paper, we focus on multi-objective optimal charging control of PHEVs in a multi-level power distribution system. The objectives of enabling valley filling with a higher priority and achieving total cost minimization with a lower priority are both investigated under the system’s constraints. For this purpose, a hierarchical optimal algorithm based on the water-filling-based algorithm and the consensus-based method is proposed. Moreover, a moving horizon method is utilized to address the random arrival and departure of PHEVs. Through numerical simulations, we show that our algorithm achieves the desirable performance. In particular, not only is the stability of the power load enhanced, but the global minimization of charging costs for vehicle owners is also achieved by using the proposed algorithm. Further, our algorithm also works for large-scale adoption of PHEVs in the multi-level framework of power distribution system with high adaptability and scalability.
Future work may include non-quadratic cost functions and general communication topologies among the PHEVs. Further, the energy storage function of PHEVs will be taken into account, in which PHEVs are allowed to inject energy back into the power grid, which additionally generates revenue for vehicle owners and enables the peak shaving as distributed generation in the multi-level power distribution system.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}