Research on the Prediction Method of Centrifugal Pump Performance Based on a Double Hidden Layer BP Neural Network

Abstract
:1. Introduction
2. Structural Design of the Centrifugal Pump Performance Prediction Model
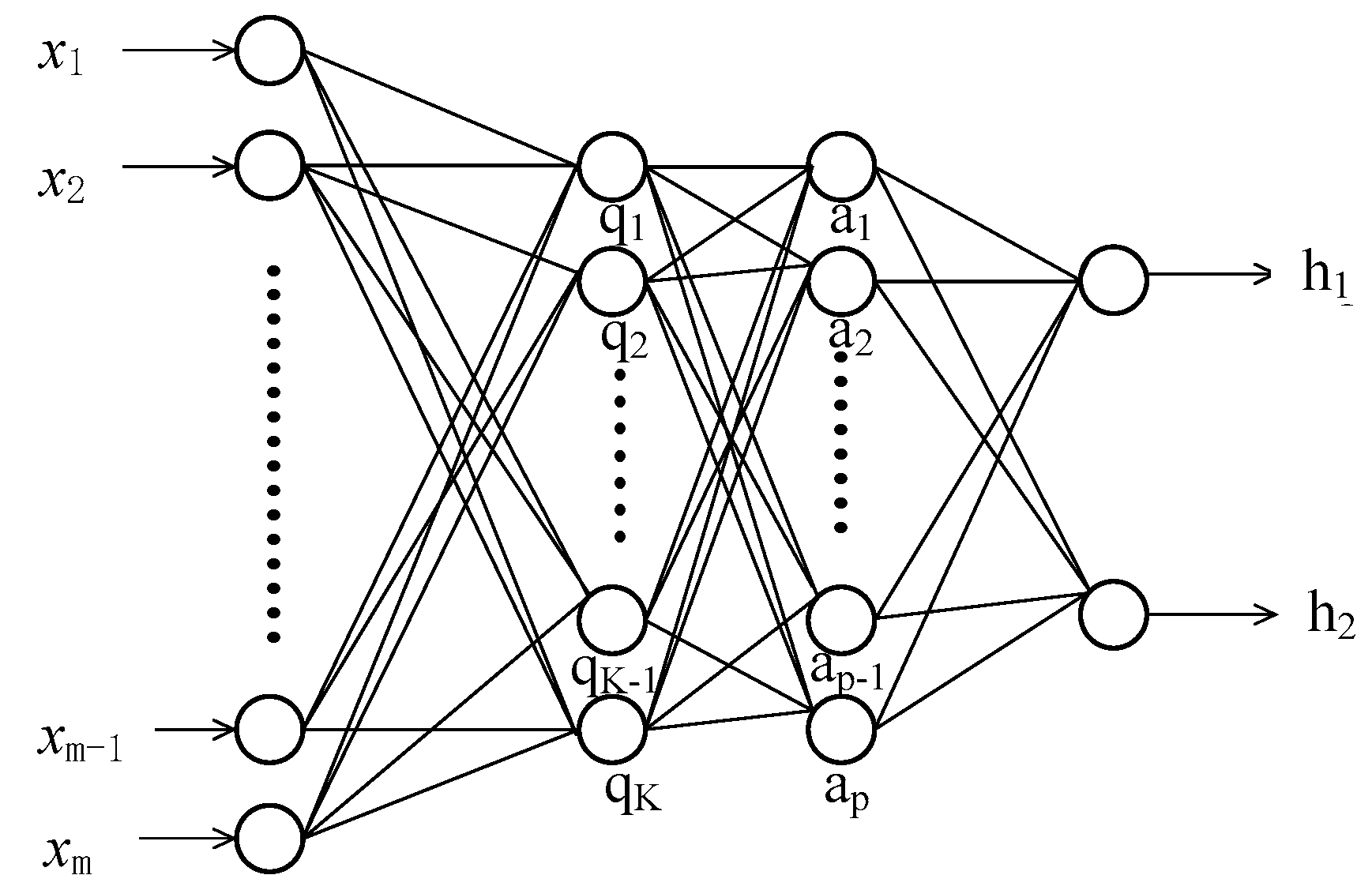
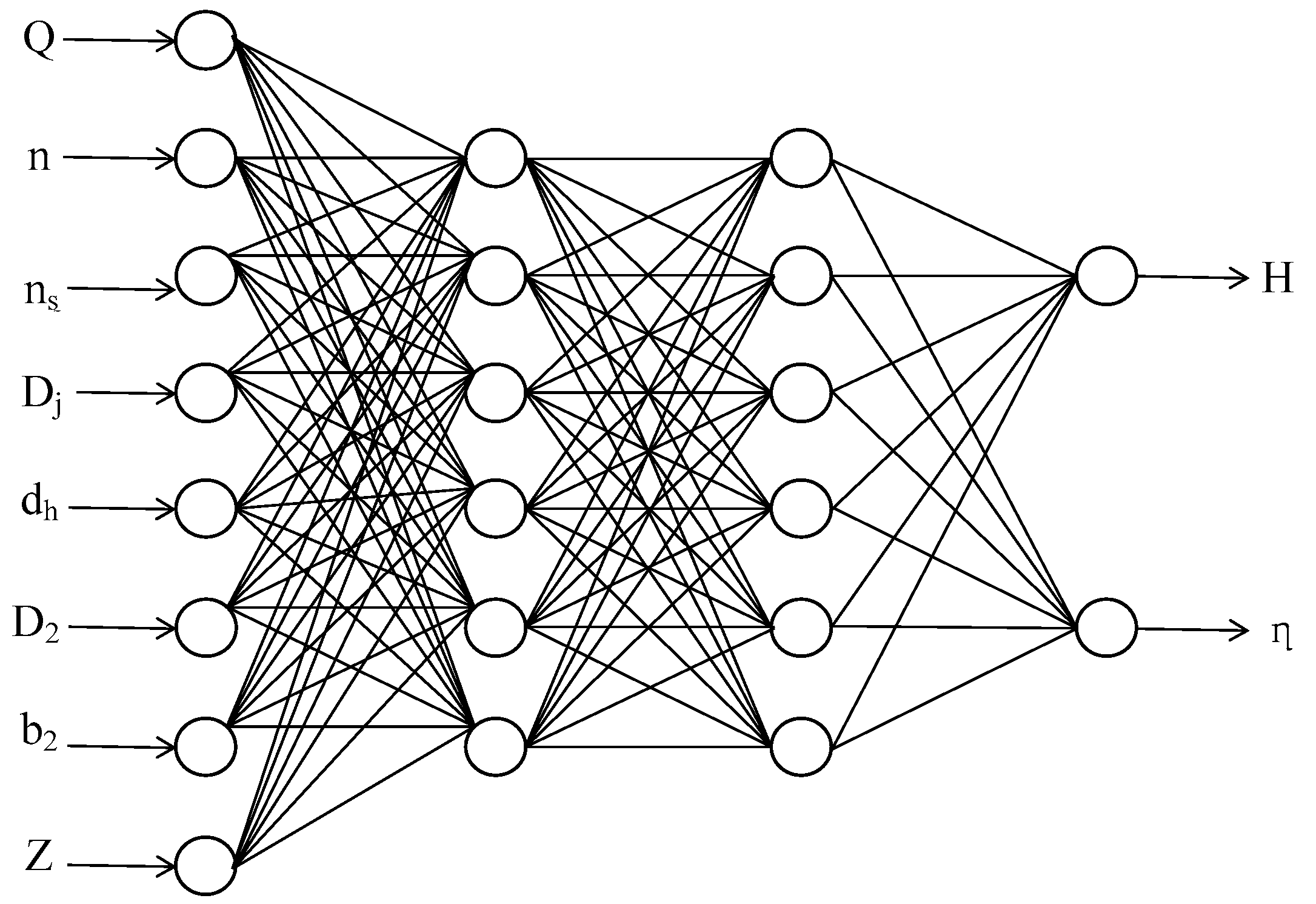
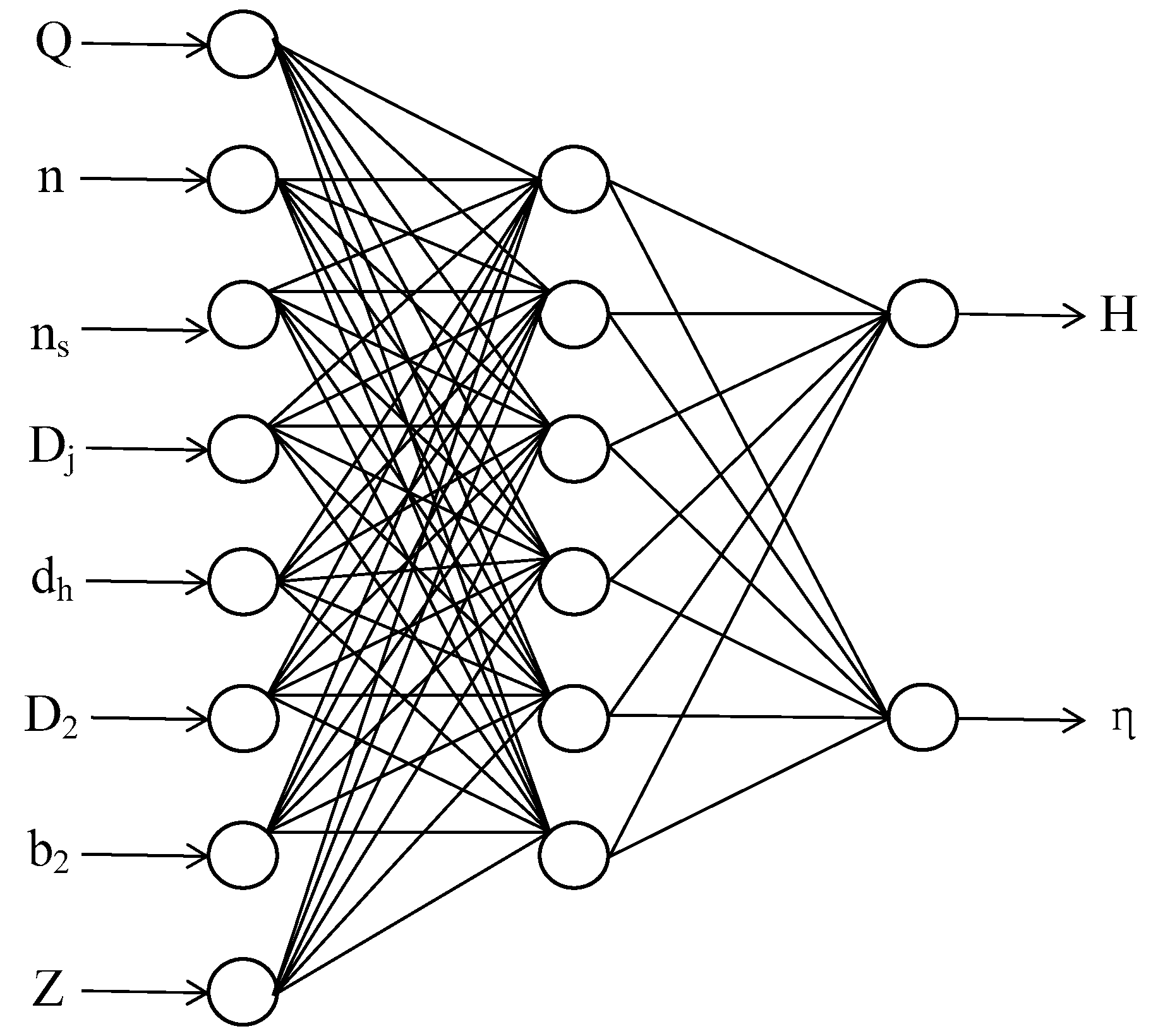
2.1. Double Hidden Layer BP Neural Network Structure
2.2. LM Algorithm
3. Establishment of Sample Data Sets
4. Prediction Results and Analysis
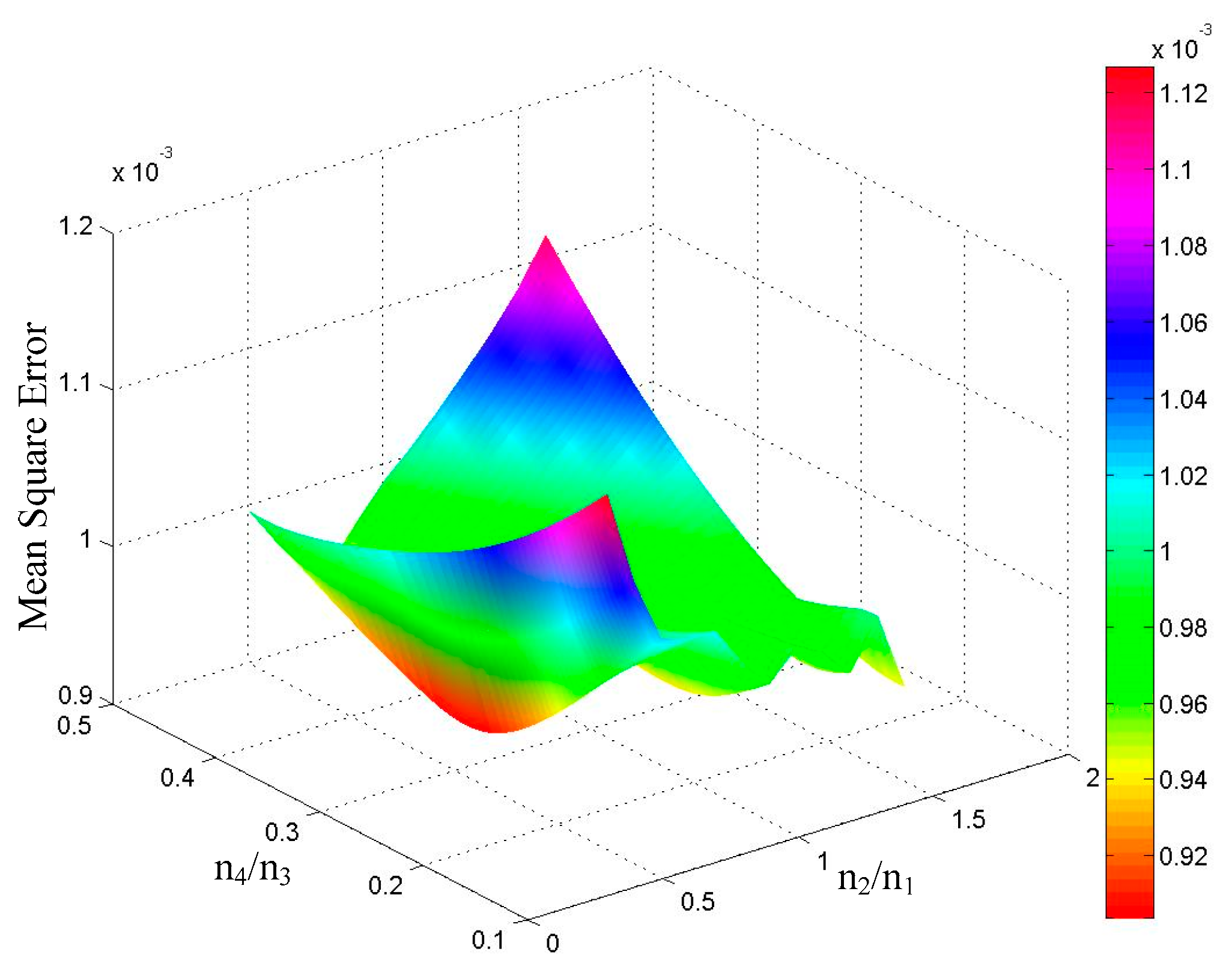
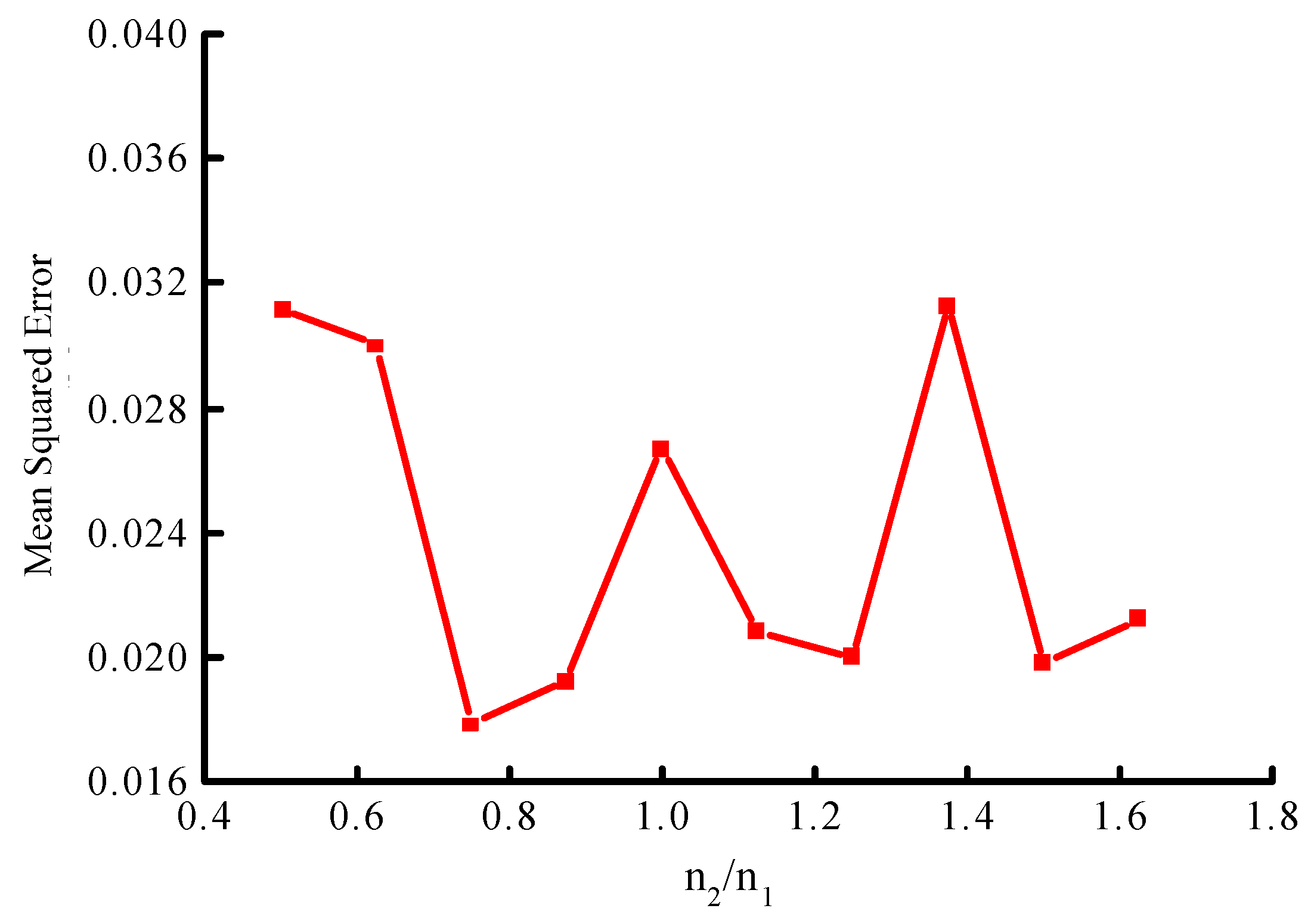
4.1. Parameter Selection of the CPBP Model
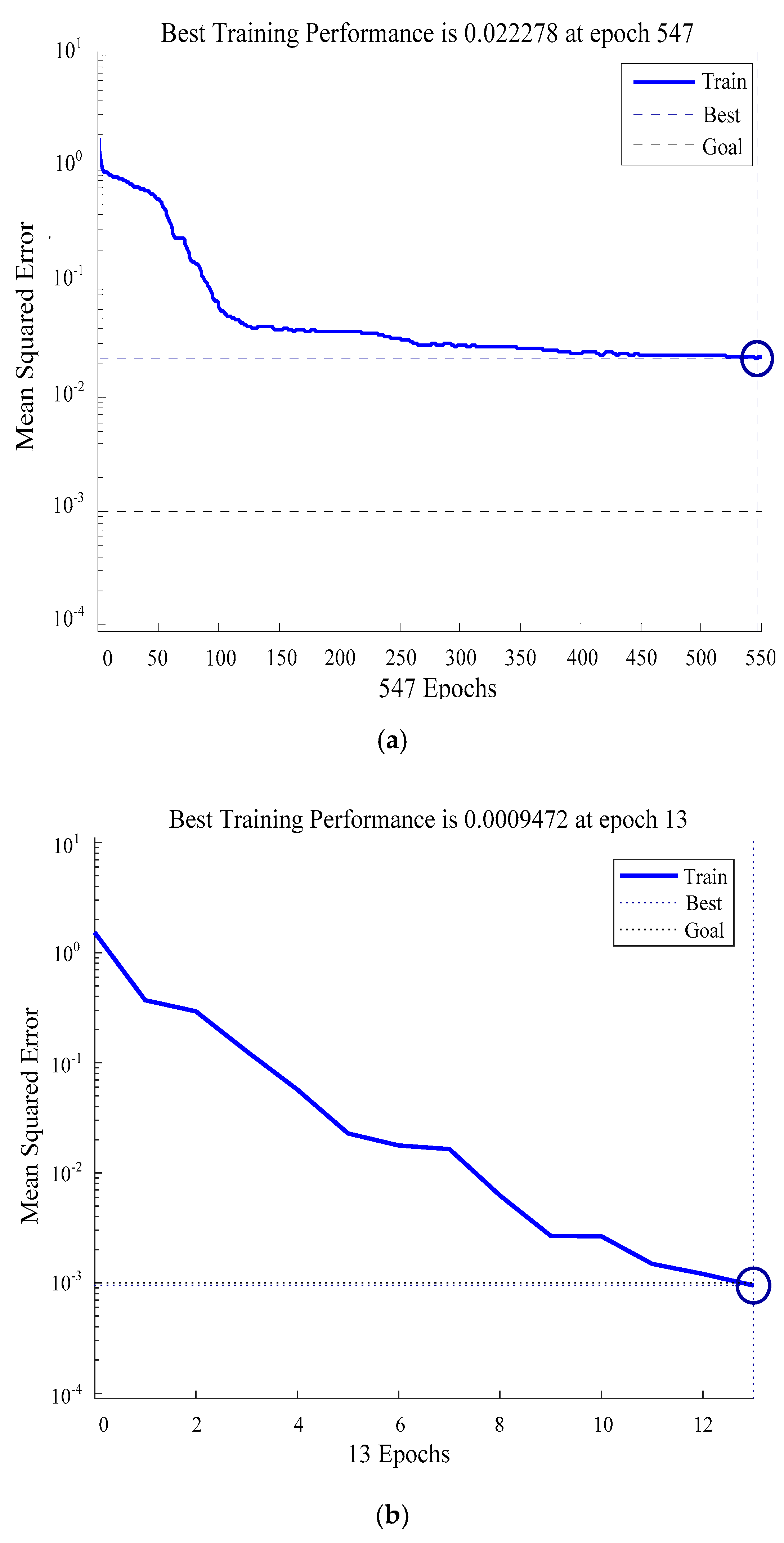
4.2. Training Process of CPBP Model
4.3. Prediction Results of CPBP Model
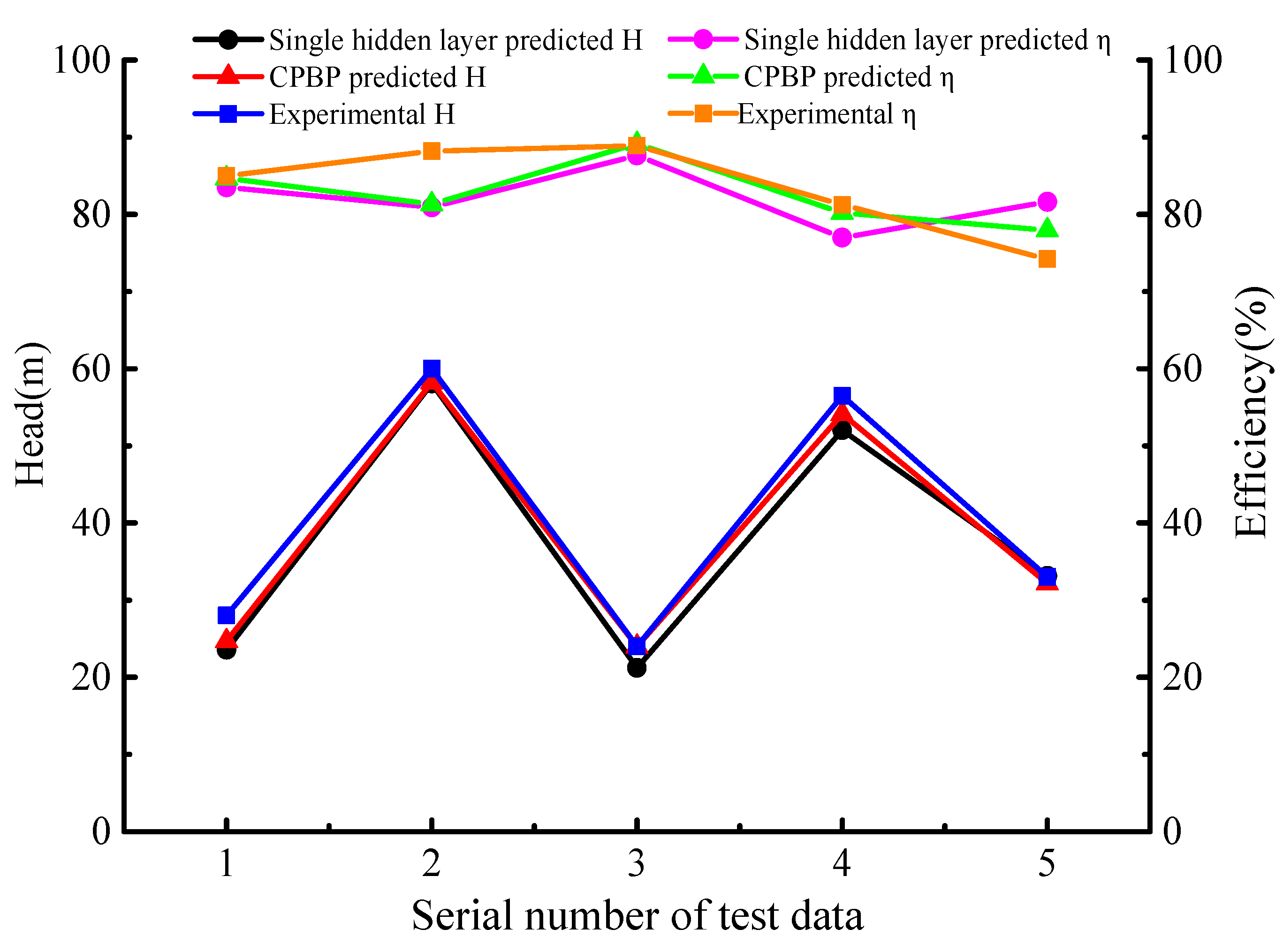
4.4. Comparison of Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kaewnai, S.; Chamaoot, M.; Wongwises, S. Predicting performance of radial flow type impeller of centrifugal pump using CFD. J. Mech. Sci. Technol. 2009, 23, 1620–1627. [Google Scholar] [CrossRef]
- Ran, J. Research and Implementation of Performance Prediction of Centrifugal Pump Based on Neural Network; University of Electronic Science and Technology of China: Chengdu, China, 2014. [Google Scholar]
- Li, D.J.; Li, Y.Y.; Li, J.X. Gesture Recognition Based on BP Neural Network Improved by Chaotic Genetic Algorithm. Int. J. Autom. Comput. 2018, 15, 21–30. [Google Scholar] [CrossRef]
- Peng, Z.Q.; Cao, C.; Huang, J.Y. Seismic signal recognition using improved BP neural network and combined feature extraction method. J. Cent. South Univ. 2014, 21, 1898–1906. [Google Scholar] [CrossRef]
- Nie, S.B.; Guan, X.F.; Liu, H.L. Exploration of Predicting the Performance of Centrifugal Pumps by Artificial Neural Network. Pump Technol. 2002, 5, 16–18. [Google Scholar]
- Yao, Y.F.; Jiang, Q.Y.; He, R.G. Performance Prediction of Centrifugal Pump Based on BP Neural Network. Mech. Des. Manuf. 2008, 10, 73–74. [Google Scholar]
- Cong, X.Q.; Yuan, S.Q.; Yuan, D.Q. Performance Prediction of Centrifugal Pump Based on Improved BP Neural Network. J. Agric. Mach. 2006, 37, 56–59. [Google Scholar]
- Jiang, W.Z.; Duan, S.Q.; Yang, C.M. Optimization design of centrifugal pump impeller based on CFD simulation and BP neural network. Mach. Tool Hydraul. 2016, 44, 67–70. [Google Scholar]
- Zayani, R.; Bouallegue, R.; Roviras, D. Adaptive Predistortions Based on Neural Networks Associated with Levenberg-Marquardt Algorithm for Satellite Down Links. EURASIP J. Wirel. Commun. Netw. 2008, 2008, 132729. [Google Scholar] [CrossRef] [Green Version]
- Camargo, A.; He, Q.; Palaniappan, K. Performance evaluation of optimization methods for super-resolution mosaicking on UAS surveillance videos. In Proceedings of the SPIE Defense, Security, and Sensing 2012, Baltimore, MD, USA, 24–26 April 2012; Volume 8355, p. 30. [Google Scholar]
- Jebur, A.A.; Atherton, W.; AlKhaddar, R.M. Settlement Prediction of Model Piles Embedded in Sandy Soil Using the Levenberg–Marquardt (LM) Training Algorithm. Geotech. Geol. Eng. 2018, 36, 2893–2906. [Google Scholar] [CrossRef]
- Comon, P.; Luciani, X.; De Almeida, A.L.F. Tensor decompositions, alternating least squares and other tales. J. Chemom. Soc. 2010, 23, 393–405. [Google Scholar] [CrossRef]
- Wang, T.Y. Research and Implementation of LM-BP Neural Network Intrusion Detection System; Hunan University: Changsha, China, 2007. [Google Scholar]
- Zhao, H.; Zhou, R.X. Neural Network Supervisory Control Based on Levenberg-Marquardt Algorithm. J. Xi’an Jiaotong Univ. 2002, 36, 523–527. [Google Scholar]
- Song, Z.J.; Wang, J. Fuzzy clustering and LM algorithm to improve BP neural network for transformer fault diagnosis. High. Volt. Electr. Appl. 2013, 5, 54–59. [Google Scholar]
- Cui, D.W. Comprehensive evaluation of water resources vulnerability in Wenshan Prefecture of Yunnan Province based on improved BP neural network model. J. Yangtze River Sci. Res. Inst. 2013, 30, 1–7. [Google Scholar]
- Ding, H.; Dong, W.Y.; Wu, D.M. Water Level Prediction of Double Hidden Layer BP Neural Network Based on LM Algorithm. Stat. Decis. 2014, 5, 16–19. [Google Scholar]
- Khayet, M.; Cojocaru, C. Artificial neural network model for desalination by sweeping gas membrane distillation. Desalination 2013, 308, 102–110. [Google Scholar] [CrossRef] [Green Version]
- Choi, H.K.Y.; Lin, W.; Loon, S.C. Facial Scanning with a Digital Camera: A Novel Way of Screening for Primary Angle Closure. J. Glaucoma 2015, 24, 522–526. [Google Scholar] [CrossRef] [PubMed]
- Cai, Z.L.; Chen, X.L.; Shi, W.R. Improvement of Comprehensive Evaluation Method of Learning Effect Based on BP Neural Network. J. Chongqing Univ. 2007, 30, 96–99. [Google Scholar]
- Gao, J.; Zhang, Y.; Du, Y. Optimization of the tire ice traction using combined Levenberg–Marquardt (LM) algorithm and neural network. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 40. [Google Scholar] [CrossRef]
- An, R.; Li, W.J.; Han, H.G. An improved Levenberg-Marquardt algorithm with adaptive learning rate for RBF neural network. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016. [Google Scholar]
- Zhang, H.H.; Tao, Y.R.; Hu, J. Prediction model of photosynthetic rate of cucumber seedlings fused with chlorophyll content. J. Agric. Mach. 2015, 46, 259–263. [Google Scholar]
- Wilamowski, B.M.; Yu, H. Improved Computation for Levenberg–Marquardt Training. IEEE Trans. Neural Netw. 2010, 21, 930–937. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.Y. Effect of Blade Wrap Angle and Exit Angle on Impeller Performance; Lanzhou University of Technology: Lanzhou, China, 2017. [Google Scholar]
- Guan, X.F. Modern Pump Theory and Design; China Aerospace Publishing House: Beijing, China, 2010. [Google Scholar]
- Jiao, B.; Ye, M.X. Method for determining the number of hidden layer units in BP neural network. J. Shanghai Dianji Univ. 2013, 16, 113–116. [Google Scholar]
- Wang, R.B.; Xu, H.Y.; Li, B. Research on the Method of Determining the Number of Nodes in BP Neural Network. Comput. Technol. Dev. 2018, 28, 31–35. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specific Speed | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | 150 | 200 |
| Disc Loss/% | 28.5 | 20.4 | 15.7 | 12.7 | 10.6 | 9.1 | 7.9 | 7.0 | 4.4 | 3.1 |
| Serial Number | ns | Q (m3/h) | N (r/min) | Dj (mm) | dh (mm) | D2 (mm) | b2 (mm) | Z | H (m) | η (%) |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 23.1 | 12.5 | 2900 | 52 | 0 | 242 | 4 | 4 | 80.78 | 42.21 |
| 2 | 30 | 21 | 2900 | 60 | 0 | 245 | 10 | 10 | 80 | 41 |
| 3 | 33 | 12.5 | 2900 | 48 | 0 | 200 | 6 | 5 | 50.34 | 51.09 |
| 4 | 47.2 | 12.5 | 2900 | 44 | 0 | 160 | 5.6 | 5 | 31.25 | 56.32 |
| 5 | 48 | 300 | 1450 | 175 | 45 | 547 | 17 | 7 | 100 | 75 |
| 6 | 58 | 75 | 2950 | 100 | 50 | 290 | 11 | 6 | 80 | 70 |
| 7 | 73 | 148 | 2900 | 110 | 25 | 278 | 15 | 6 | 90 | 80.5 |
| 8 | 81 | 140 | 1450 | 138 | 32 | 317 | 19 | 6 | 30 | 79.7 |
| 9 | 90 | 200 | 2900 | 110 | 25 | 255 | 18 | 7 | 84 | 80 |
| 10 | 103 | 130 | 1450 | 140 | 38 | 262 | 23 | 6 | 21 | 82 |
| 11 | 131 | 400 | 1450 | 190 | 0 | 345 | 35 | 6 | 32 | 83 |
| 12 | 151 | 243 | 1450 | 162 | 35 | 262 | 34 | 6 | 19 | 86.8 |
| 13 | 205 | 2600 | 740 | 450 | 0 | 640 | 120 | 5 | 25 | 88.9 |
| 14 | 225 | 6300 | 490 | 700 | 0 | 965 | 186 | 5 | 23 | 88 |
| 15 | 302 | 6650 | 660 | 625 | 0 | 775.5 | 187 | 4 | 24 | 85.8 |
| Parameter | Epochs | LR | MF | MSE |
|---|---|---|---|---|
| Setting | 550 | 0.04 | 0.95 | 0.001 |
| Serial Number | Input Value | Experimental Value | Predictive Value | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ns | Q (m3/h) | n (r/min) | Dj (mm) | dh (mm) | D2 (mm) | b2 (mm) | Z | H (m) | H (%) | H** (m) | η** (%) | |
| 1 | 180 | 620 | 1450 | 225 | 50 | 340 | 54 | 5 | 28 | 85 | 24.6756 | 84.6602 |
| 2 | 114 | 775 | 1450 | 240 | 48 | 440 | 42 | 6 | 60 | 88.2 | 58.2233 | 81.3399 |
| 3 | 246 | 3500 | 740 | 500 | 0 | 650 | 137 | 5 | 24 | 88.9 | 23.9672 | 89.1542 |
| 4 | 85.6 | 100 | 2900 | 90 | 0 | 210 | 16 | 6 | 56.5 | 81.25 | 54.1095 | 80.2150 |
| 5 | 128.1 | 100 | 2900 | 100 | 0 | 178 | 17 | 6 | 33 | 74.2 | 32.1484 | 77.9264 |
| Serial Number | Experimental Value | Predicted Value and Relative Error of BP Network with Single Hidden Layer | Predicted Value and Relative Error of Double Hidden Layer (CPBP Model) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| H/m | η/% | H*/m | η*/% | △η*/% | △H*/% | H**/m | η**/% | △η**% | △H**/% | |
| 1 | 28 | 85 | 23.5700 | 83.5183 | 1.7400 | 15.8200 | 24.6756 | 84.6602 | 0.3990 | 11.8700 |
| 2 | 60 | 88.2 | 58.0873 | 80.9351 | 8.2400 | 3.1880 | 58.2233 | 81.3399 | 7.7700 | 2.9600 |
| 3 | 24 | 88.9 | 21.2275 | 87.6447 | 1.4000 | 11.5500 | 23.9672 | 89.1542 | 0.2860 | 0.1360 |
| 4 | 56.5 | 81.25 | 52.0179 | 76.9955 | 5.2400 | 7.9000 | 54.1095 | 80.2150 | 1.2700 | 4.2300 |
| 5 | 33 | 74.2 | 33.1127 | 81.6154 | 9.9900 | 0.3400 | 32.1484 | 77.9264 | 5.0000 | 2.5800 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, W.; Nan, L.; Su, M.; Chen, Y.; Li, R.; Zhang, X. Research on the Prediction Method of Centrifugal Pump Performance Based on a Double Hidden Layer BP Neural Network. Energies 2019, 12, 2709. https://doi.org/10.3390/en12142709
Han W, Nan L, Su M, Chen Y, Li R, Zhang X. Research on the Prediction Method of Centrifugal Pump Performance Based on a Double Hidden Layer BP Neural Network. Energies. 2019; 12(14):2709. https://doi.org/10.3390/en12142709
Chicago/Turabian StyleHan, Wei, Lingbo Nan, Min Su, Yu Chen, Rennian Li, and Xuejing Zhang. 2019. "Research on the Prediction Method of Centrifugal Pump Performance Based on a Double Hidden Layer BP Neural Network" Energies 12, no. 14: 2709. https://doi.org/10.3390/en12142709
APA StyleHan, W., Nan, L., Su, M., Chen, Y., Li, R., & Zhang, X. (2019). Research on the Prediction Method of Centrifugal Pump Performance Based on a Double Hidden Layer BP Neural Network. Energies, 12(14), 2709. https://doi.org/10.3390/en12142709