A Modulated Model Predictive Current Controller for Interior Permanent-Magnet Synchronous Motors



Abstract
:1. Introduction
- 1
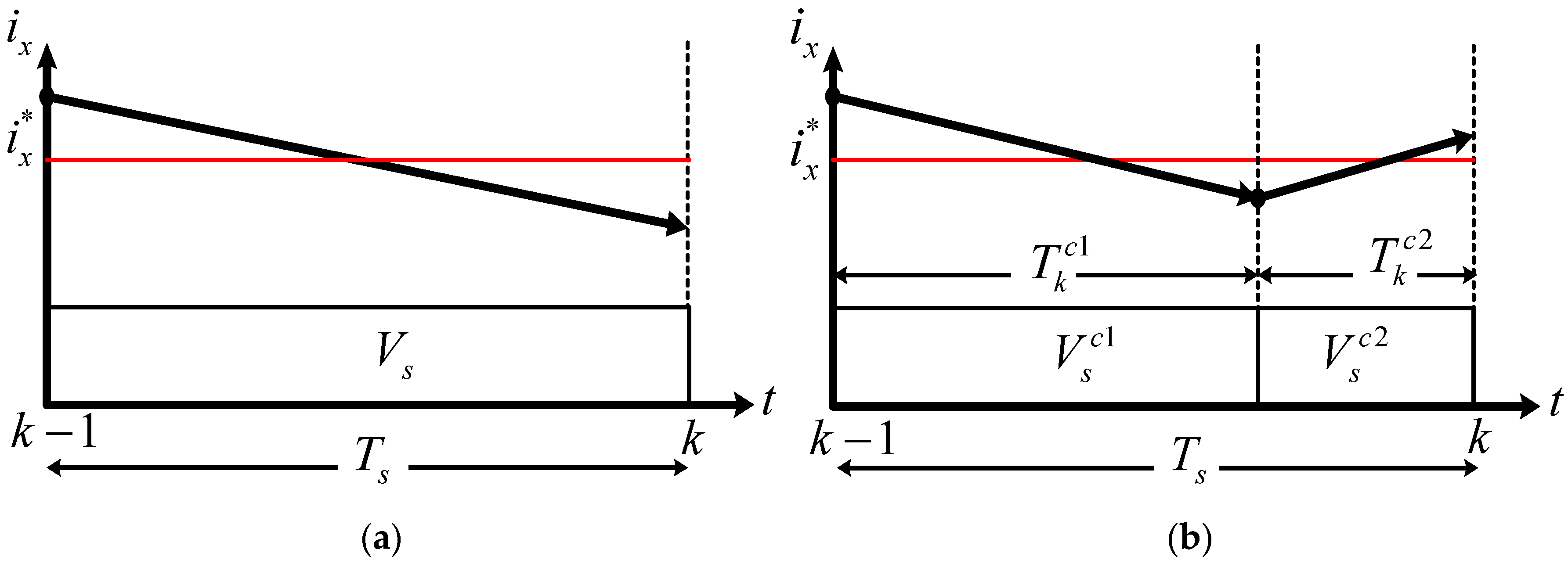
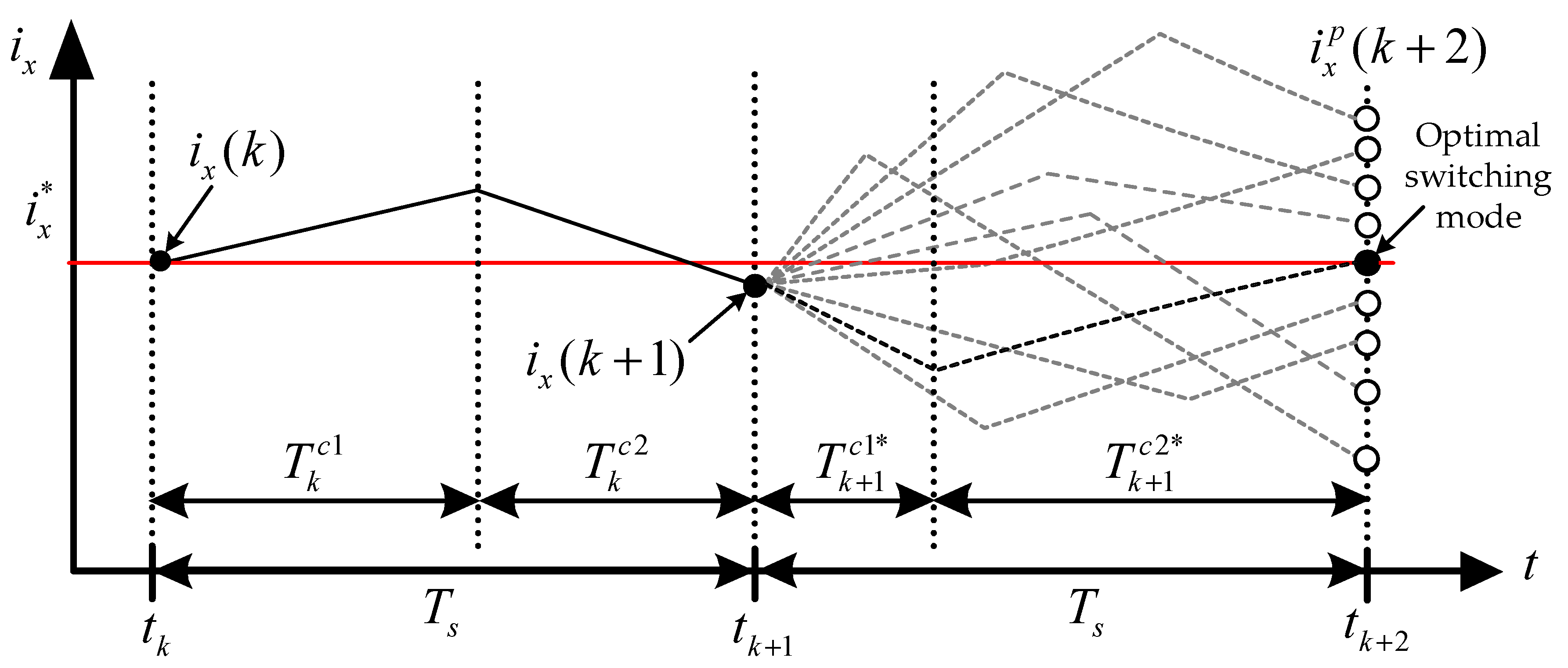
- In a sampling period, the applications of two successive voltage vectors are allowed to operate together with two optimal duty ratios while achieving the current predictions. It is worth noting that these optimized duty ratios are calculated online.
- 2
- More candidate switching modes are obtained via the linear combinations of two voltage vectors, increased from the typical seven switching modes described in [20] to thirteen when using the proposed control strategy, thus enhancing control efficiency while retaining the simplicity of the algorithm.
- 3
- The duty ratio is taken as a variable; hence, it is incorporated into the cost function and optimized.
- 4
- This is the first implementation of such an MMPCC on the IPMSM drive system.
2. Current Control Prediction Based on Conventional MPC
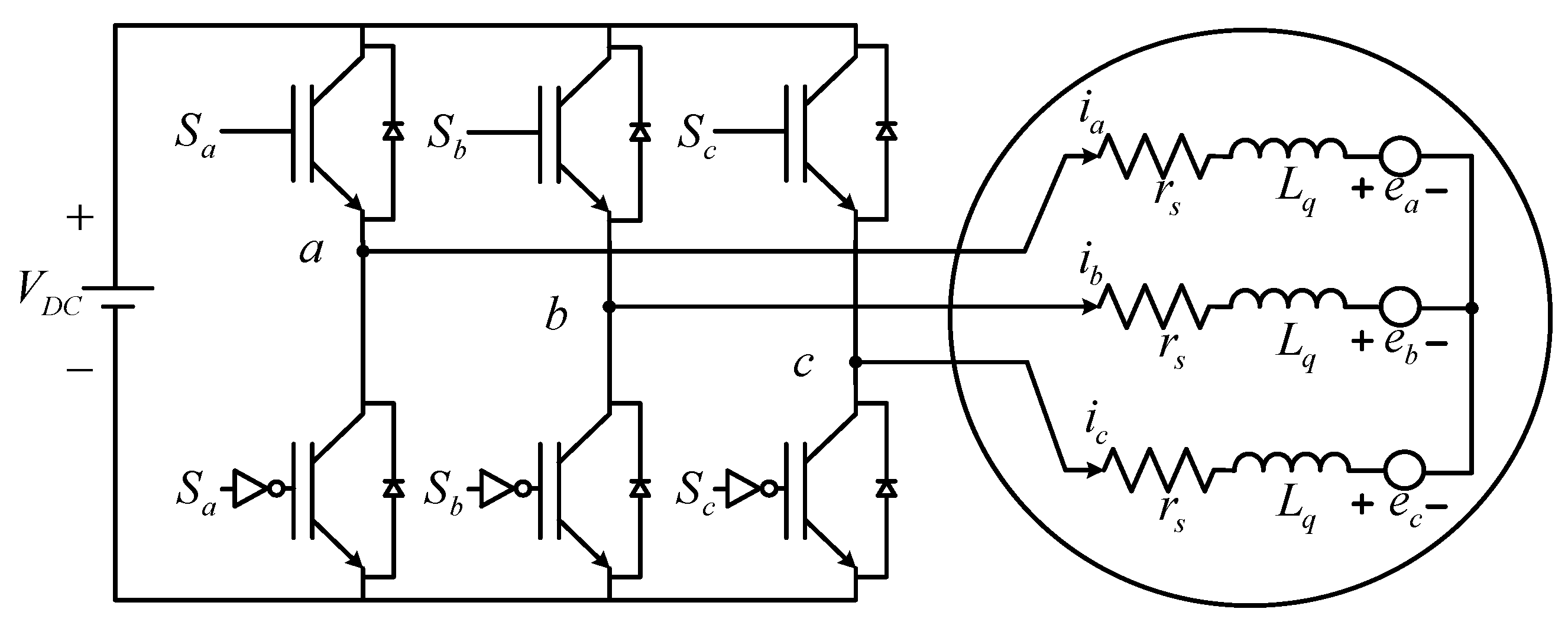
2.1. Mathematical Model of IPMSM
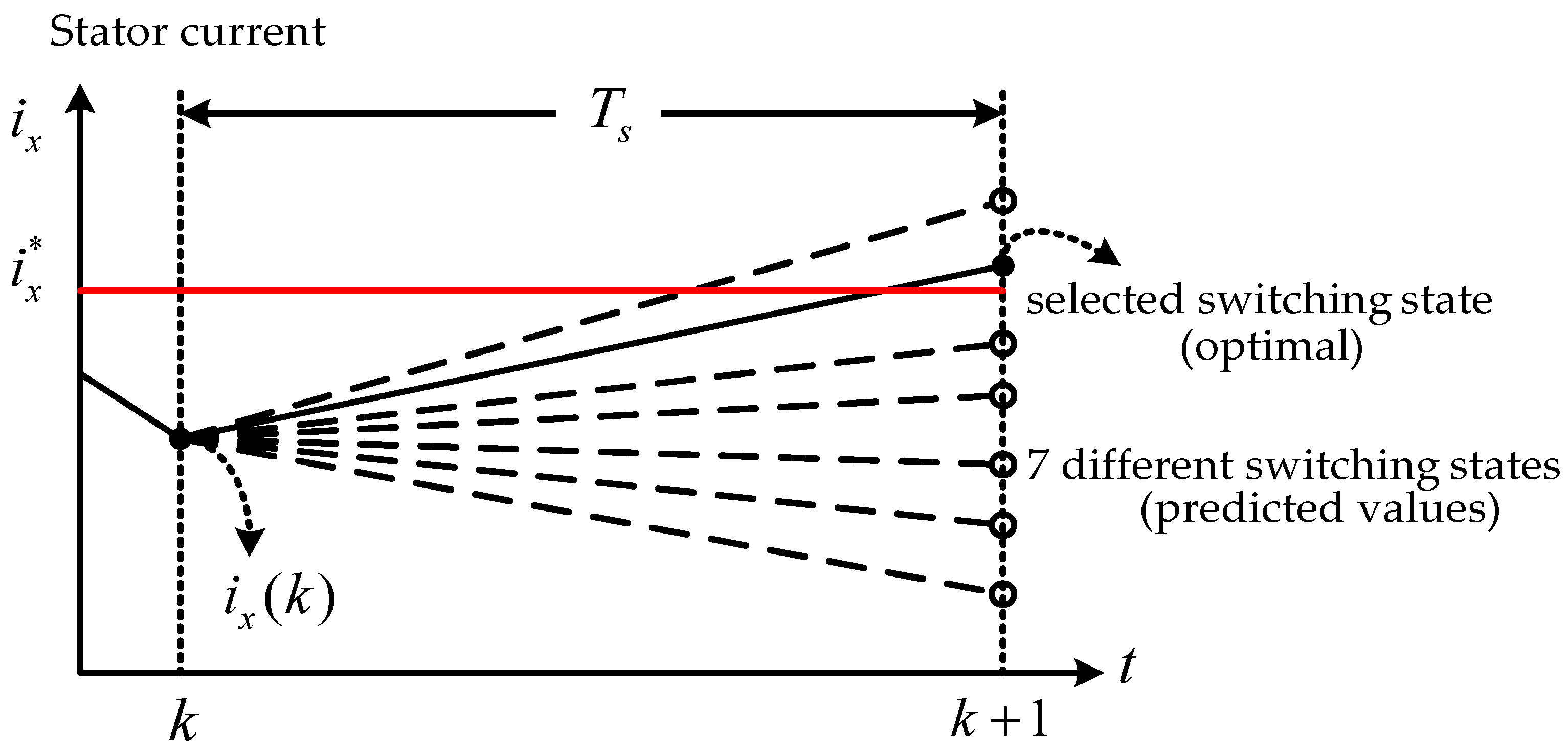
2.2. Optimal Voltage Vector Selection
2.3. Current Prediction Strategy
3. Proposed Modulated Model Predictive Current Control
3.1. Design of Adaptive Duty Ratio Modulation
3.2. Synthesized Voltage Vectors and Current Prediction
3.3. Cost Function Design and Optimized Modulation Ratios
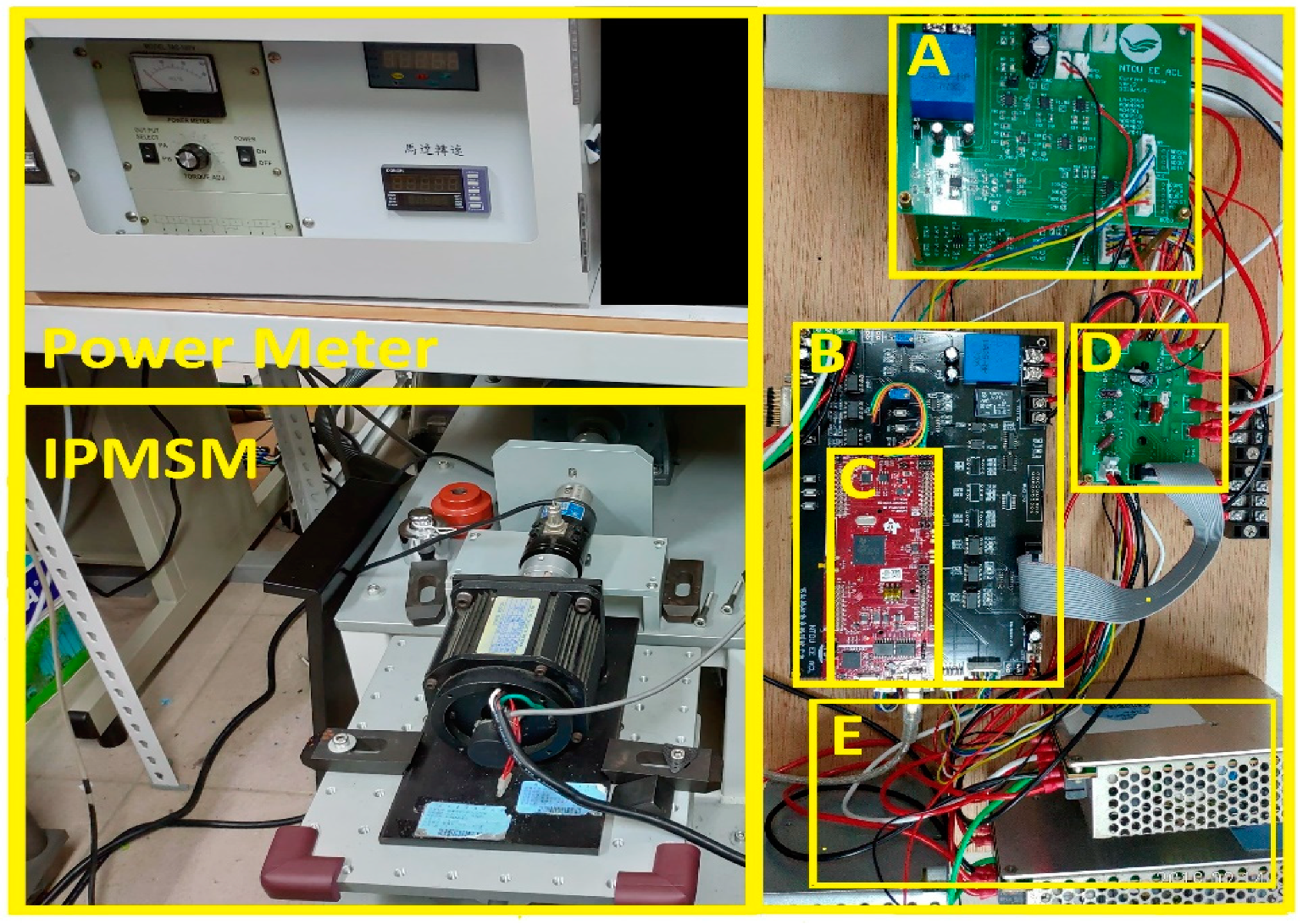
4. Experimental Test Stand and Results
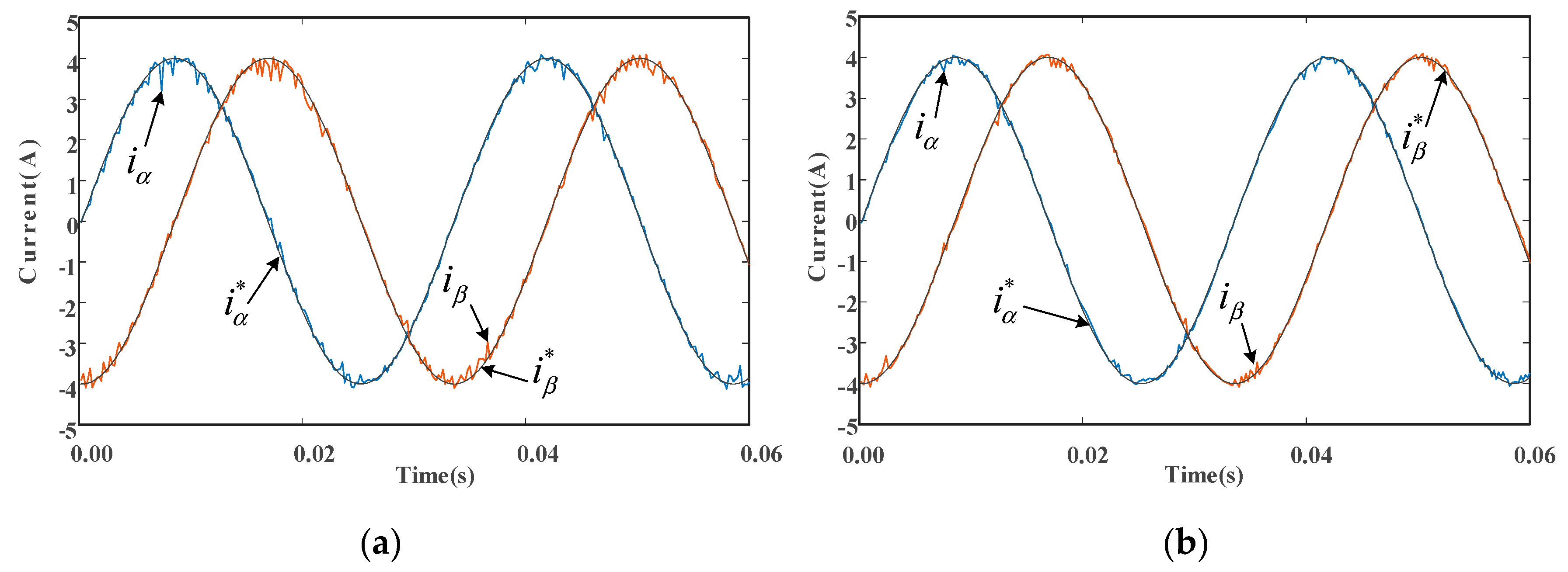
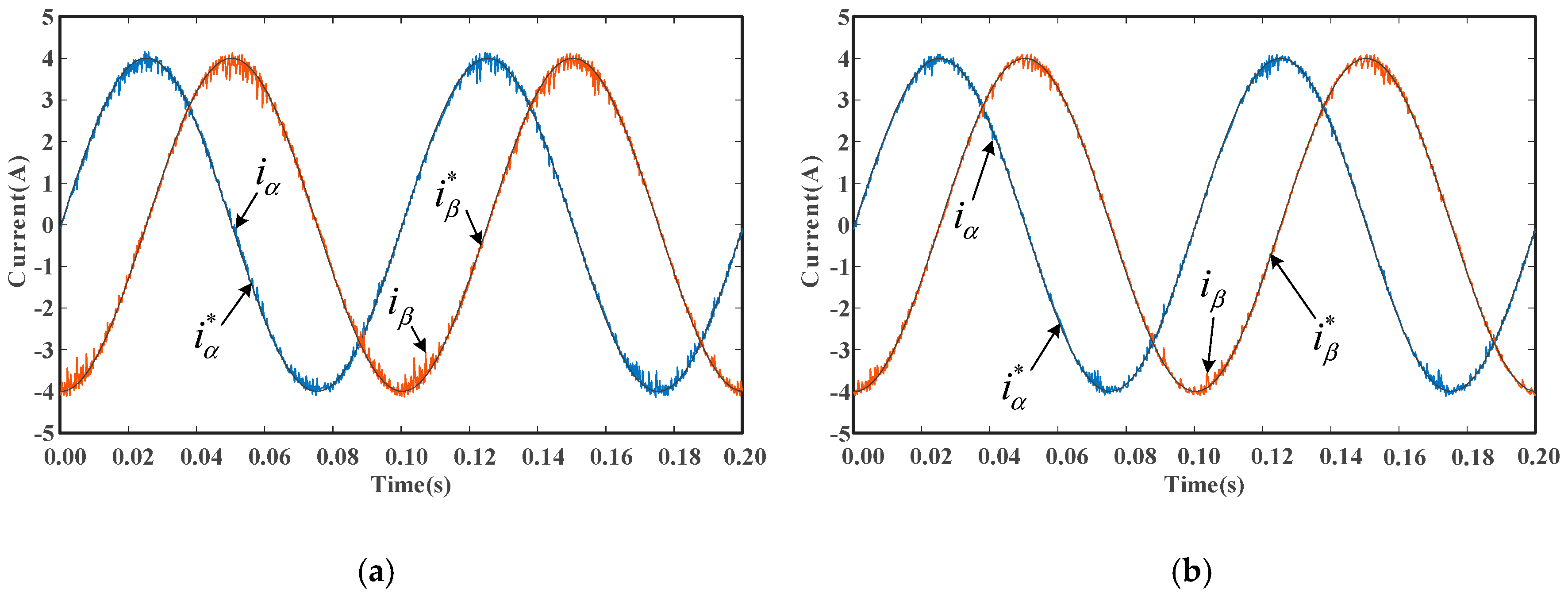
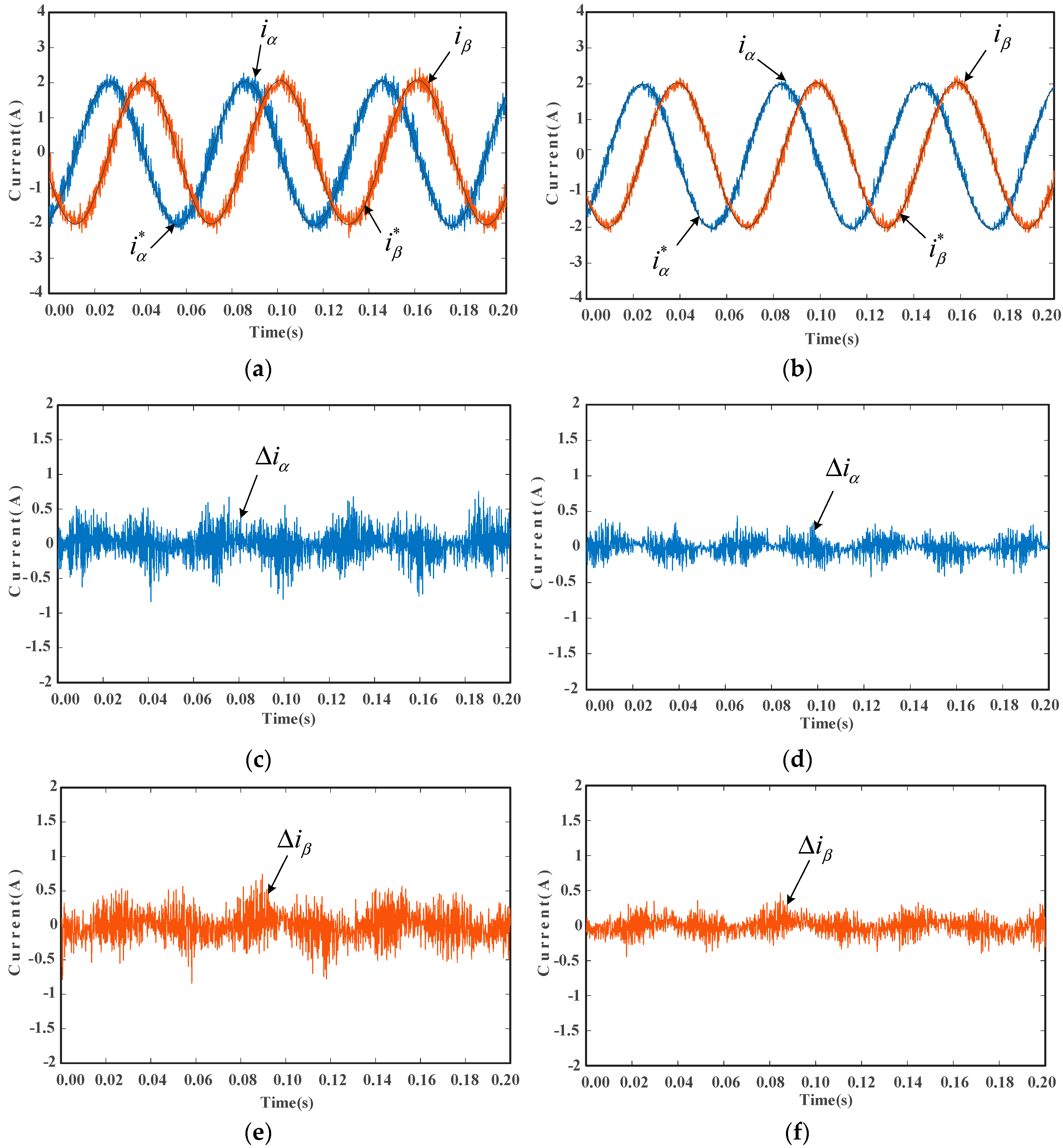
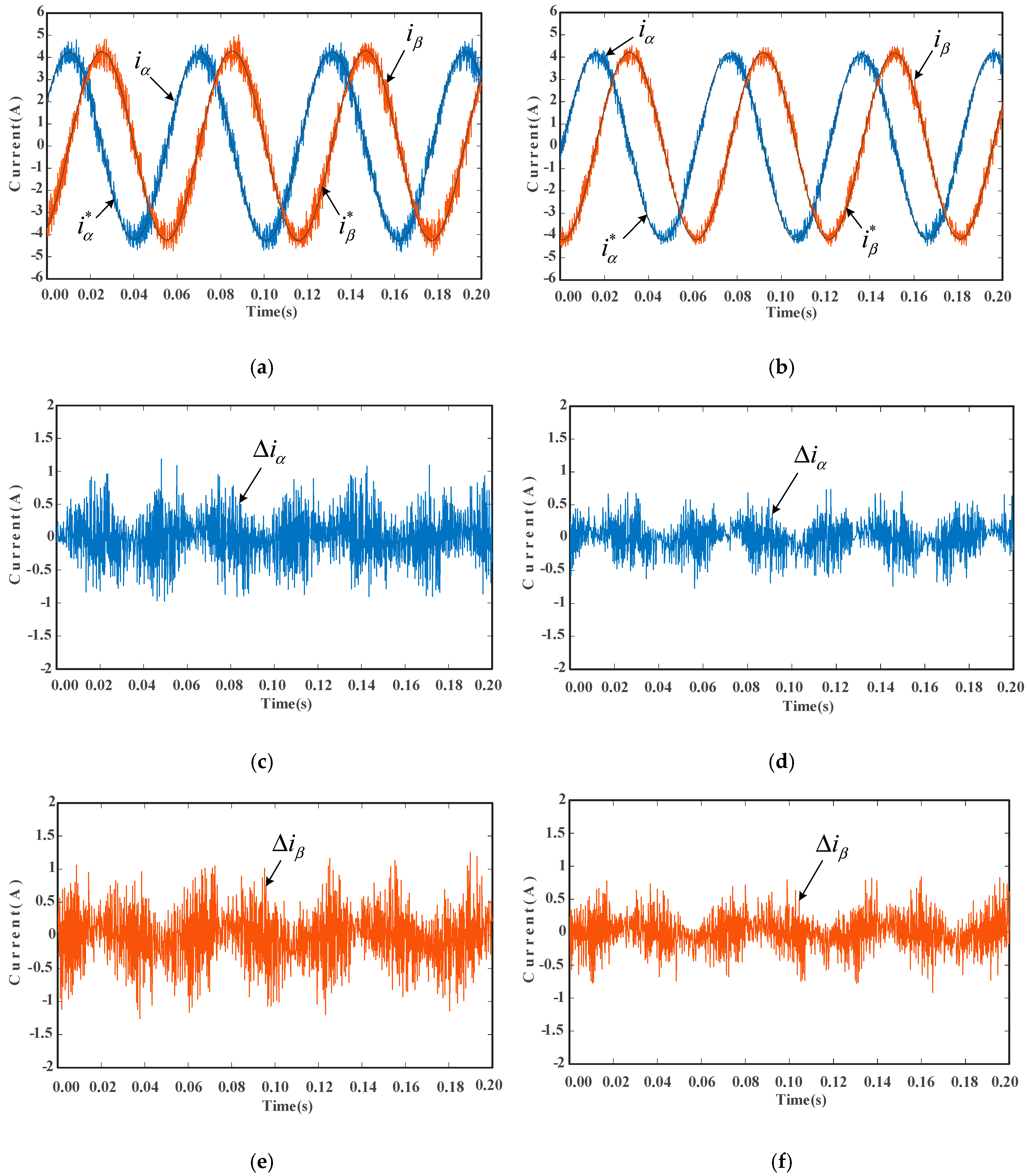
4.1. Steady-State Response
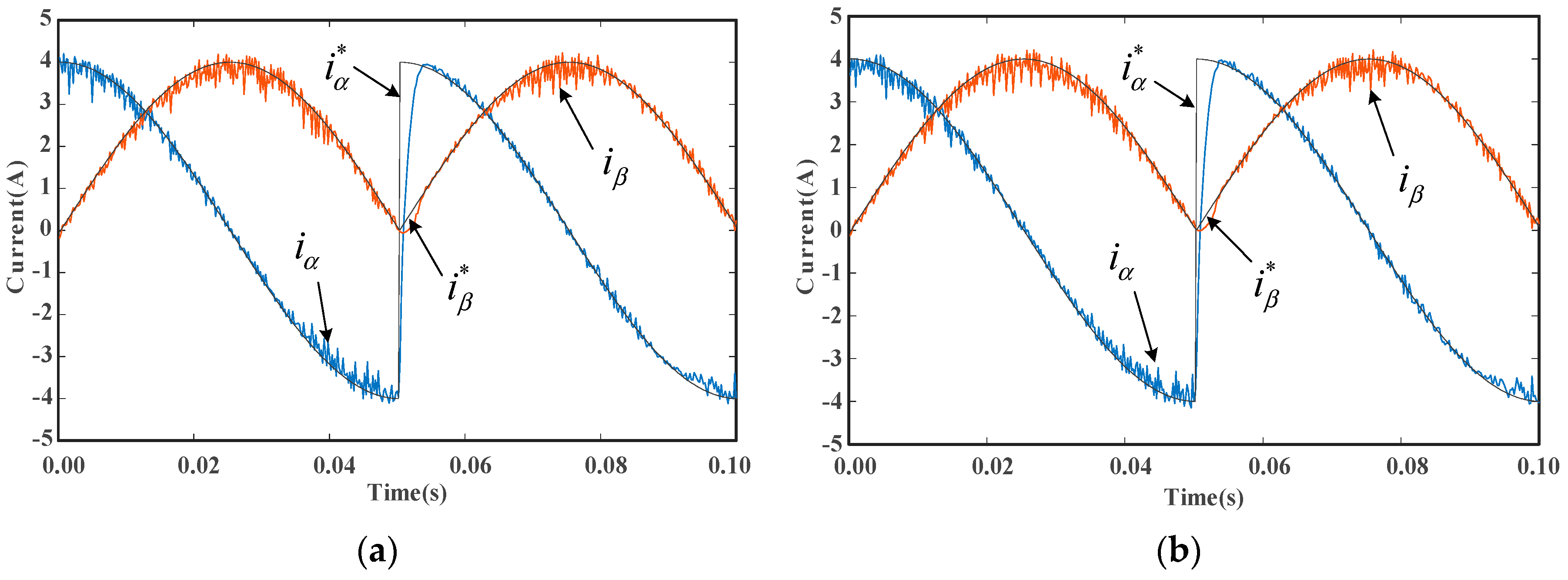
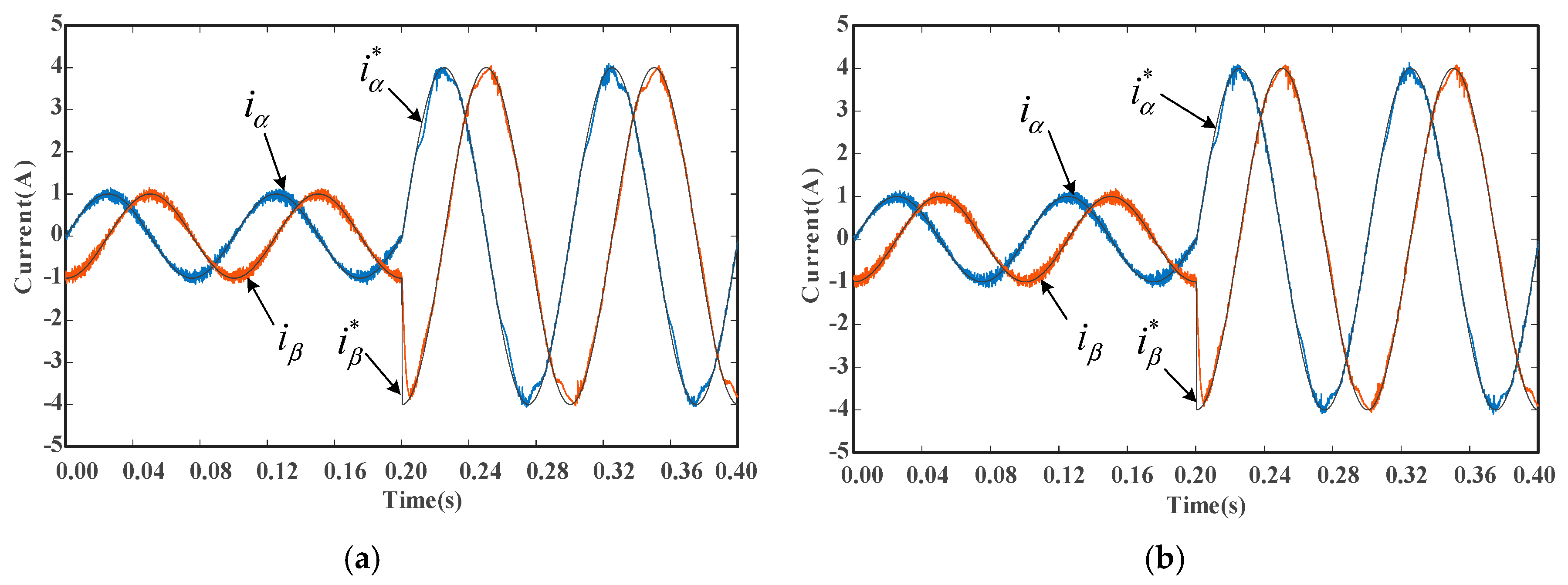
4.2. Transient Response
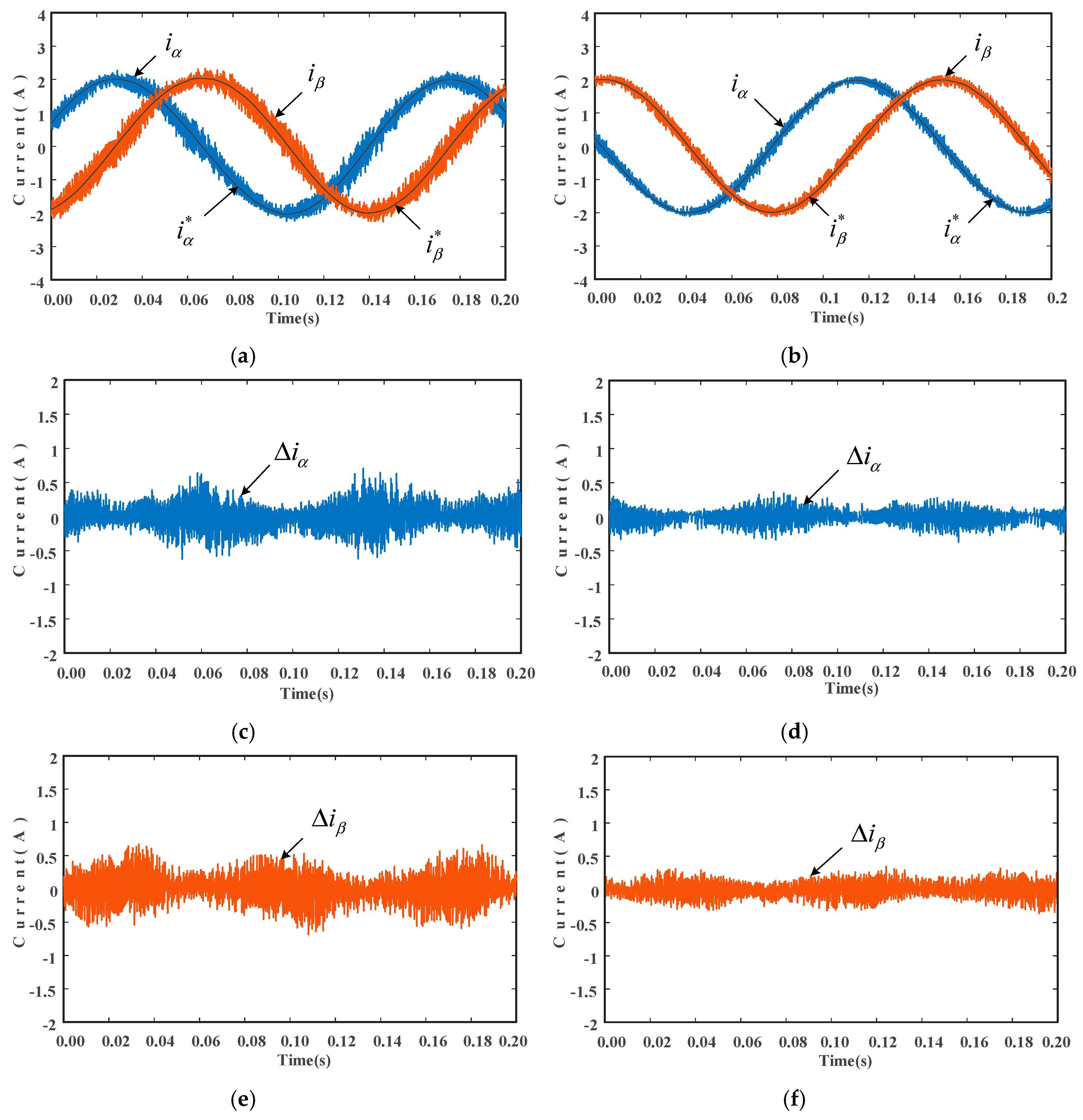
4.3. Load-Torque and Speed Varying Condition
4.4. Anaylsis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kim, S.I.; Kim, Y.K.; Lee, G.H.; Hong, J.P. A novel rotor configuration and experimental verification of interior PM synchronous motor for high-speed applications. IEEE Trans. Magn. 2012, 48, 843–846. [Google Scholar] [CrossRef]
- Rovere, L.; Formentini, A.; Gaeta, A.; Zanchetta, P.; Marchesoni, M. Sensorless finite-control set model predictive control for IPMSM drives. IEEE Trans. Ind. Electron. 2016, 63, 5921–5931. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives, 1st ed.; John Wiley & Sons Ltd. Publication: West Sussex, UK, 2012; pp. 133–143. [Google Scholar]
- Bose, B. Energy, environment, and advances in power electronics. IEEE Trans. Power Electron. 2000, 15, 688–701. [Google Scholar] [CrossRef]
- Rodriguez, J.; Pontt, J.; Silva, C.A.; Correa, P.; Lezana, P.; Cortes, P.; Ammann, U. Predictive current control of a voltage source inverter. IEEE Trans. Ind. Electron. 2007, 54, 495–503. [Google Scholar] [CrossRef]
- Xia, C.; Wang, M.; Song, Z.; Liu, T. Robust model predictive current control of three-phase voltage source PWM rectifier with online disturbance observation. IEEE Trans. Ind. Inform. 2012, 8, 459–471. [Google Scholar] [CrossRef]
- Beerten, J.; Verveckken, J.; Driesen, J. Predictive direct torque control for flux and torque ripple reduction. IEEE Trans. Ind. Electron. 2010, 57, 404–412. [Google Scholar] [CrossRef]
- Yang, X.; Liu, G.; Li, A.; Le, V.D. A predictive power control strategy for DFIGs based on a wind energy converter system. Energies 2017, 10, 1098. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Abbaszadeh, A.; Rodriguez, J. Robustness improvement of predictive current control using prediction error correction for permanent-magnet synchronous machines. IEEE Trans. Ind. Electron. 2016, 63, 3458–3466. [Google Scholar] [CrossRef]
- Bode, G.H.; Loh, P.C.; Newman, M.J.; Holmes, D.G. An improved robust predictive current regulation algorithm. IEEE Trans. Ind. Appl. 2005, 41, 1720–1733. [Google Scholar] [CrossRef]
- Mynar, Z.; Vesely, L.; Vaclavek, P. PMSM model predictive control with field-weakening implementation. IEEE Trans. Ind. Electron. 2016, 63, 5156–5166. [Google Scholar] [CrossRef]
- Ngo, V.Q.B.; Nguyen, M.K.; Tran, T.T.; Lim, Y.C.; Choi, J.H. A simplified model predictive control for T-type inverter with output LC filter. Energies 2019, 12, 31. [Google Scholar] [CrossRef]
- Zhang, Y.; Xie, W.; Li, Z.; Zhang, Y. Model predictive direct power control of a PWM rectifier with duty cycle optimization. IEEE Trans. Power Electron. 2013, 28, 5343–5351. [Google Scholar] [CrossRef]
- Yan, L.; Dou, M.; Hua, Z.; Zhang, H.; Yang, J. Optimal duty cycle model predictive current control of high-altitude ventilator induction motor with extended minimum stator current operation. IEEE Trans. Power Electron. 2018, 33, 7240–7251. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, Y.; Qiao, W.; Qu, L. A space-vector-modulated sensorless direct-torque control for direct-drive PMSG wind turbines. IEEE Trans. Ind. Appl. 2014, 50, 2331–2341. [Google Scholar] [CrossRef]
- Zhang, Z.; Wei, C.; Qiao, W.; Qu, L. Adaptive saturation controller-based direct torque control for permanent-magnet synchronous machines. IEEE Trans. Power Electron. 2016, 31, 7112–7122. [Google Scholar] [CrossRef]
- Castelló, J.; Espí, J.M.; García-Gil, R. A new generalized robust predictive current control for grid-connected inverters compensates anti-aliasing filters delay. IEEE Trans. Ind. Electron. 2016, 63, 4485–4494. [Google Scholar] [CrossRef]
- Su, D.; Zhang, C.; Dong, Y. Finite-state model predictive current control for surface-mounted permanent magnet synchronous motors based on current locus. IEEE Access 2017, 5, 27366–27375. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Rivera, M.; Rodríguez, J. An experimental evaluation of predictive current control and predictive torque control for a PMSM fed by a matrix converter. IEEE Trans. Ind. Electron. 2017, 64, 8459–8471. [Google Scholar] [CrossRef]
- Lin, C.K.; Liu, T.H.; Yu, J.T.; Fu, L.C.; Hsiao, C.F. Model-free predictive current control for interior permanent-magnet synchronous motor drives based on current difference detection technique. IEEE Trans. Ind. Electron. 2014, 61, 667–681. [Google Scholar] [CrossRef]
- Lin, C.K.; Yu, J.T.; Lai, Y.S.; Yu, H.C. Improved model-free predictive current control for synchronous reluctance motor drives. IEEE Trans. Ind. Electron. 2016, 63, 3942–3953. [Google Scholar] [CrossRef]
- Lin, C.K.; Yu, J.T.; Huang, H.Q.; Wang, J.T.; Yu, H.C.; Lai, Y.S. A dual-voltage-vector model-free predictive current controller for synchronous reluctance motor drive systems. Energies 2018, 11, 1743. [Google Scholar] [CrossRef]
- Majmunović, B.; Dragičević, T.; Blaabjerg, F. Multi objective modulated model predictive control of stand-alone voltage source converters. IEEE J. Emerg. Sel. Top. Power Electron. 2019. [Google Scholar] [CrossRef]
- Wu, Z.; Chu, J.; Gu, W.; Huang, Q.; Chen, L.; Yuan, X. Hybrid modulated model predictive control in a modular multilevel converter for multi-terminal direct current systems. Energies 2018, 11, 1861. [Google Scholar] [CrossRef]
- Gong, Z.; Wu, X.; Dai, P.; Zhu, R. Modulated model predictive control for MMC-based active front-end rectifiers under unbalanced grid conditions. IEEE Trans. Ind. Electron. 2019, 66, 2398–2409. [Google Scholar] [CrossRef]
- Garcia, C.F.; Silva, C.A.; Rodriguez, J.R.; Zanchetta, P.; Odhano, S.A. Modulated model-predictive control with optimized overmodulation. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 404–413. [Google Scholar] [CrossRef]
- He, Z.; Guo, P.; Shuai, Z.; Xu, Q.; Luo, A.; Guerrero, J.M. Modulated model predictive control for modular multilevel AC/AC converter. IEEE Trans. Power Electron. 2019, 34, 10359–10372. [Google Scholar] [CrossRef]
- Lin, C.K.; Liu, T.H.; Lo, C.H. Sensorless interior permanent magnet synchronous motor drive system with a wide adjustable speed range. IET Electr. Power Appl. 2009, 3, 133–146. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay compensation in model predictive current control of a three-phase inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Switching State | Three-Phase Output Voltage | Voltage Vector | |||||
|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | |||
| 0 | |||||||
| 0 | |||||||
| 0 | 0 | 0 | 0 | 0 | |||
| Linear Combination | |||
|---|---|---|---|
| First | Second | ||
| Parameter | Value |
|---|---|
| Rated Power (W/Hp) | 375/0.5 |
| Rated Torque (N-m) | 2 |
| Rated Speed (rpm) | 2000 |
| Number of Poles | 8 |
| Stator Resistance (Ω) | 6.8 |
| d-axis inductance (mH) | 24.76 |
| q-axis inductance (mH) | 45.33 |
| Composite Parameter | Value |
|---|---|
| −1.955880 | |
| 2.955880 | |
| −0.004315 | |
| 0.002141 | |
| 0.002173 |
| Figure | MPCC Without Modulation | MMPCC | Improvements to MPCC | |||
|---|---|---|---|---|---|---|
| Current Ripple (A) | THD (%) | Current Ripple (A) | THD (%) | Current Ripple Reduction (%) | THD Reduction (%) | |
| Figure 8 | 0.1077 | 0.8182 | 0.0705 | 0.4755 | 34.54 | 41.89 |
| Figure 9 | 0.1136 | 0.7008 | 0.0762 | 0.6199 | 32.92 | 11.54 |
| Figure 10 | 0.3133 | 17.3591 | 0.3078 | 17.3339 | 1.76 | 0.15 |
| Figure 11 | 0.1447 | 8.6492 | 0.1317 | 8.5906 | 8.98 | 0.68 |
| Figure 12 | 0.2463 | 5.8826 | 0.1378 | 2.2183 | 44.05 | 62.29 |
| Figure 13 | 0.4260 | 3.6802 | 0.2776 | 3.5609 | 34.84 | 3.24 |
| Figure 14 | 0.2555 | 7.5919 | 0.2006 | 7.4425 | 21.49 | 1.97 |
| Figure 15 | 0.2166 | 6.7520 | 0.1326 | 3.1791 | 38.78 | 52.92 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agustin, C.A.; Yu, J.-t.; Lin, C.-K.; Fu, X.-Y. A Modulated Model Predictive Current Controller for Interior Permanent-Magnet Synchronous Motors. Energies 2019, 12, 2885. https://doi.org/10.3390/en12152885
Agustin CA, Yu J-t, Lin C-K, Fu X-Y. A Modulated Model Predictive Current Controller for Interior Permanent-Magnet Synchronous Motors. Energies. 2019; 12(15):2885. https://doi.org/10.3390/en12152885
Chicago/Turabian StyleAgustin, Crestian Almazan, Jen-te Yu, Cheng-Kai Lin, and Xiang-Yong Fu. 2019. "A Modulated Model Predictive Current Controller for Interior Permanent-Magnet Synchronous Motors" Energies 12, no. 15: 2885. https://doi.org/10.3390/en12152885
APA StyleAgustin, C. A., Yu, J. -t., Lin, C. -K., & Fu, X. -Y. (2019). A Modulated Model Predictive Current Controller for Interior Permanent-Magnet Synchronous Motors. Energies, 12(15), 2885. https://doi.org/10.3390/en12152885