Online MTPA Trajectory Tracking of IPMSM Based on a Novel Torque Control Strategy

Abstract
:1. Introduction
2. System Model and MTPA Condition
2.1. Per Unit Model of IPMSM
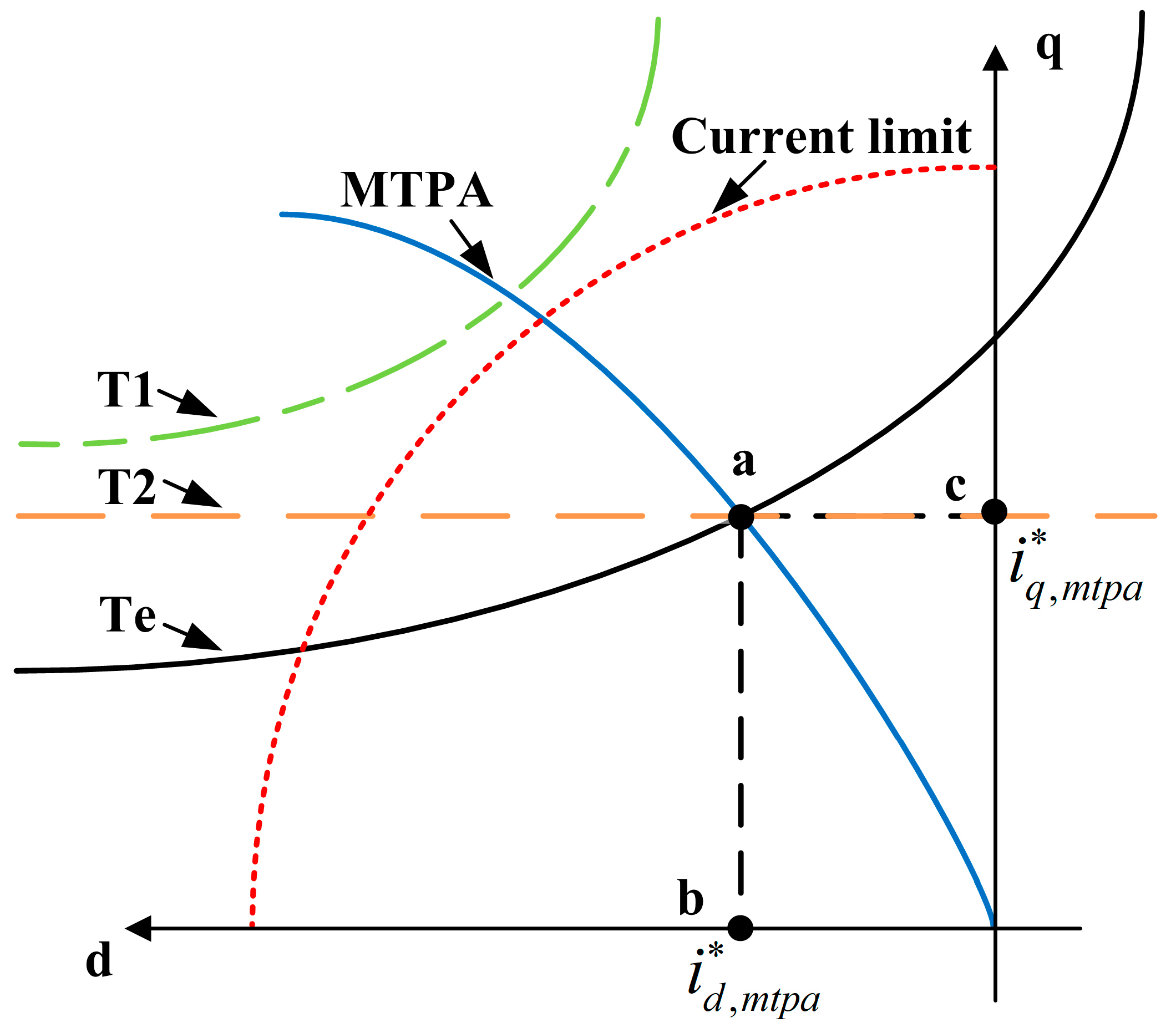
2.2. MTPA Condition
3. Torque Control and Stability Analysis
3.1. Torque Control with MTPA Trajectory Tracking
3.2. Stability Analysis and Convergence Rate Estimation
4. Results
4.1. Simulation Results
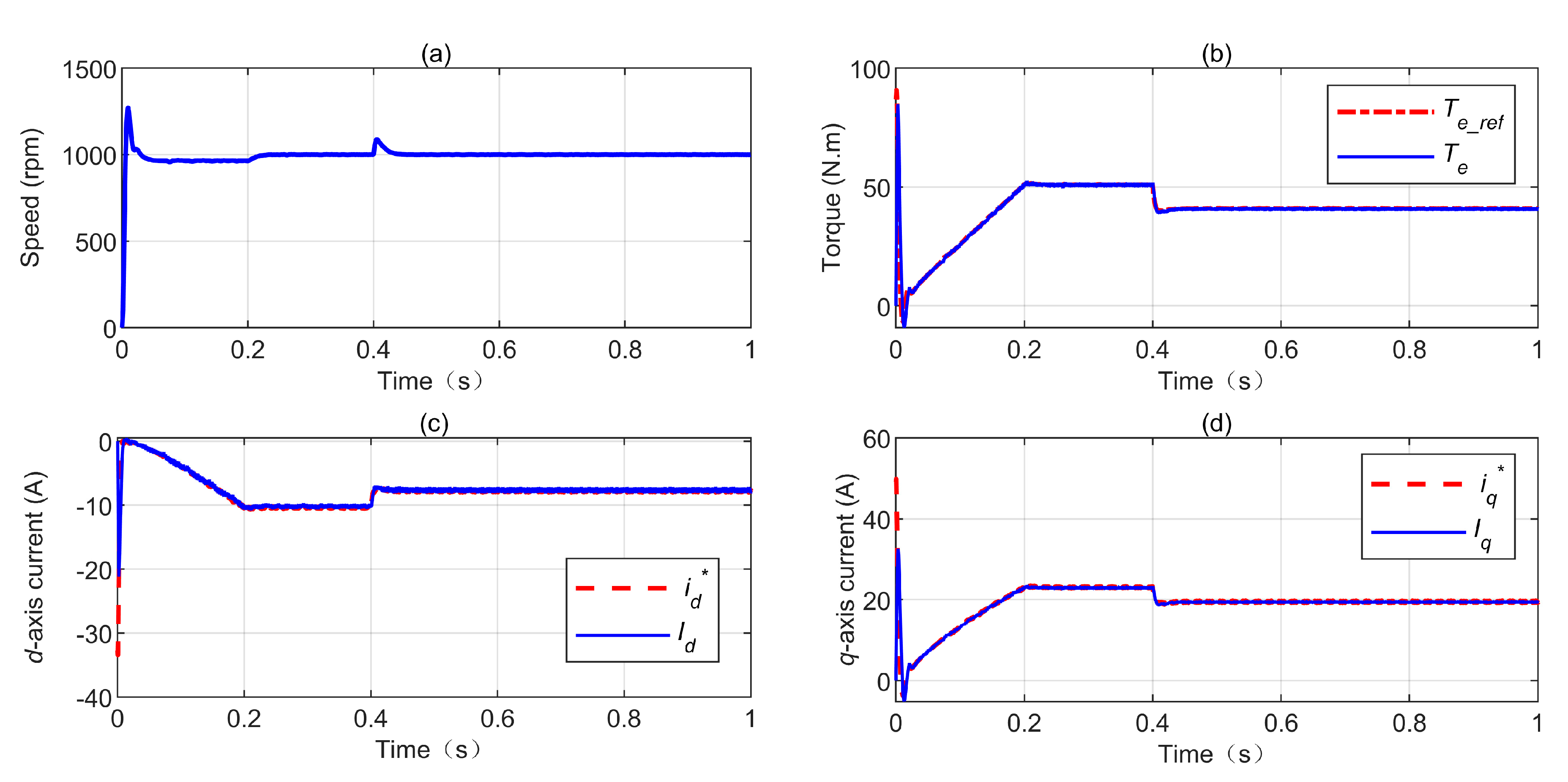
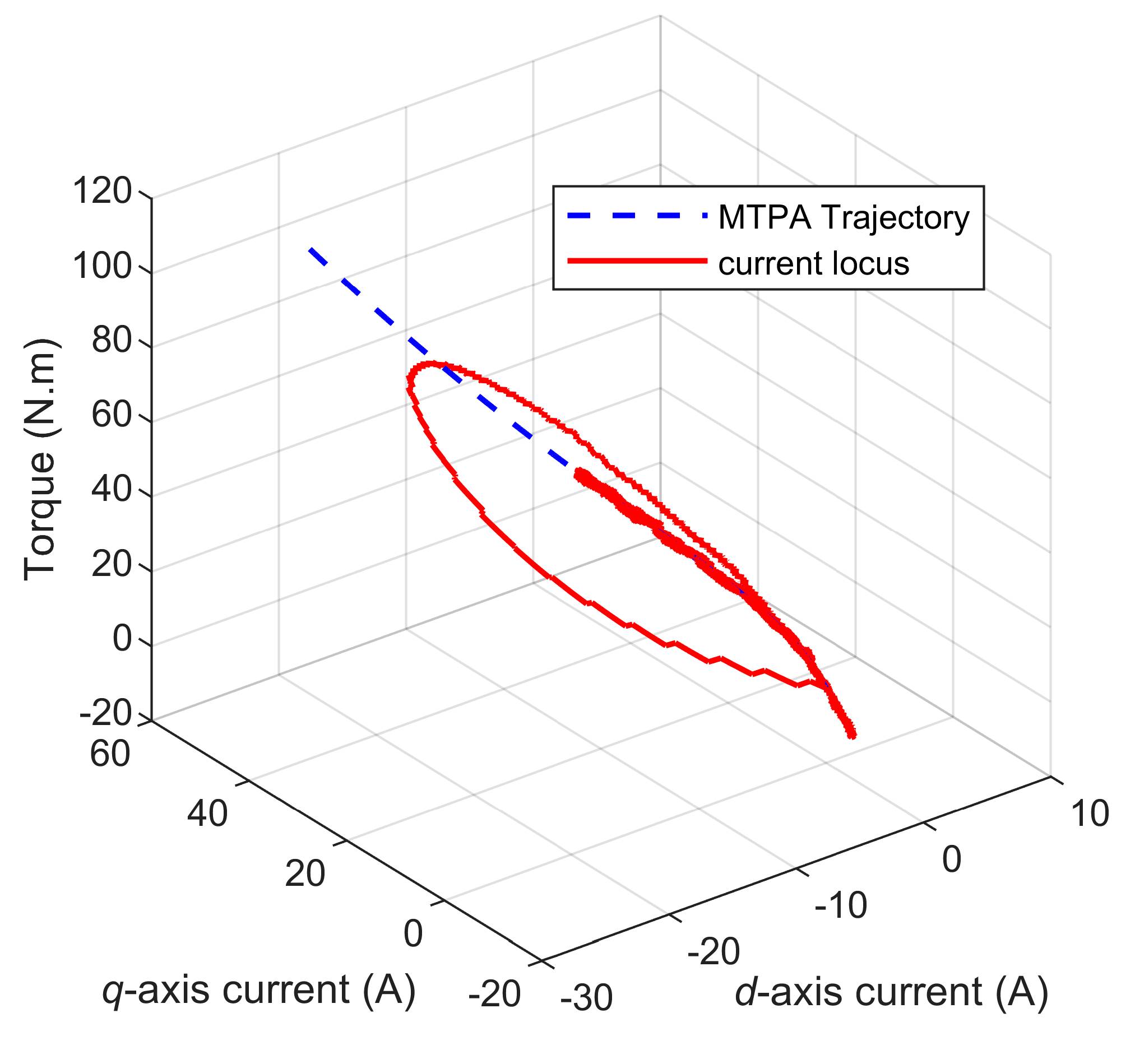
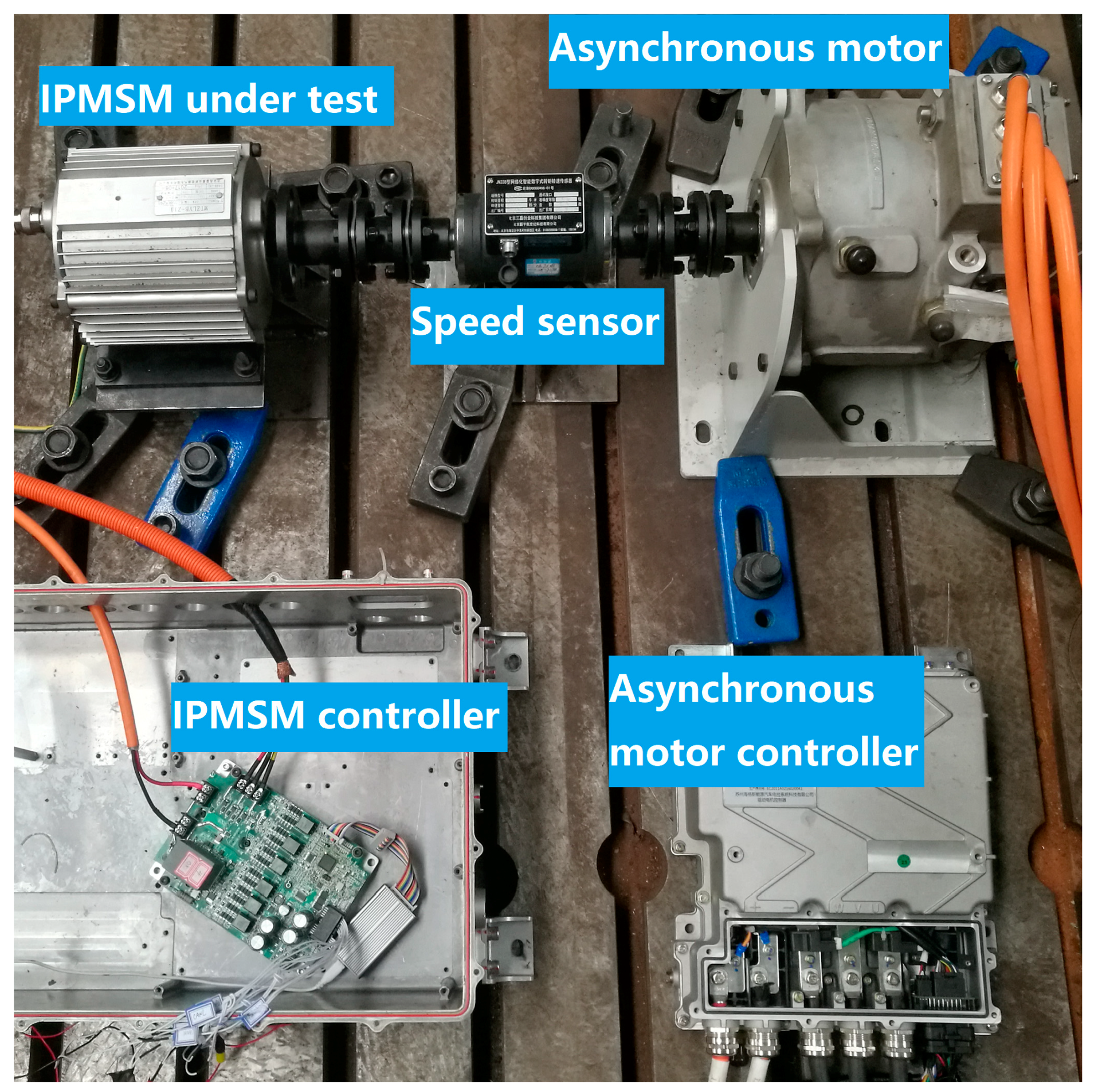
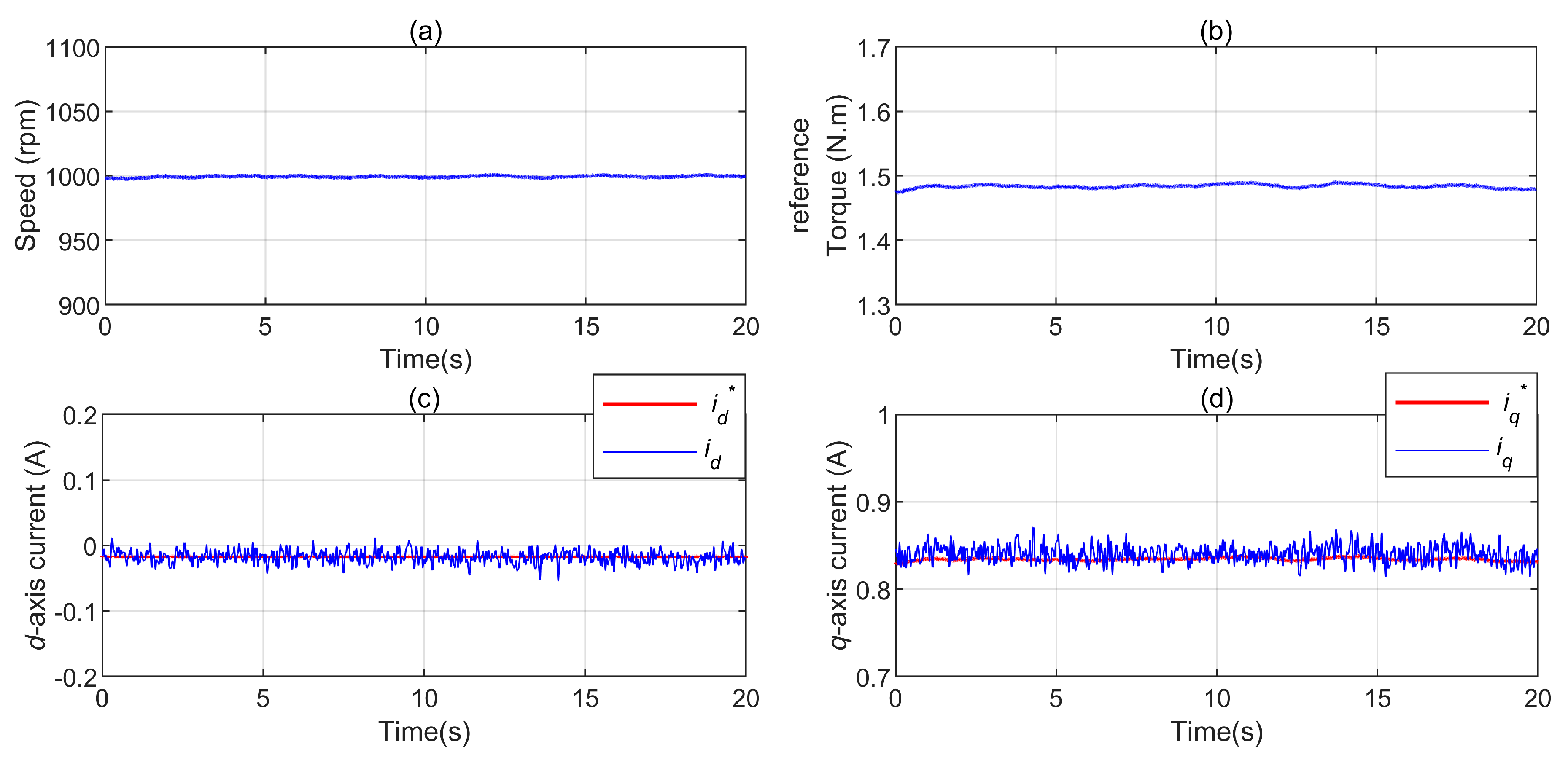
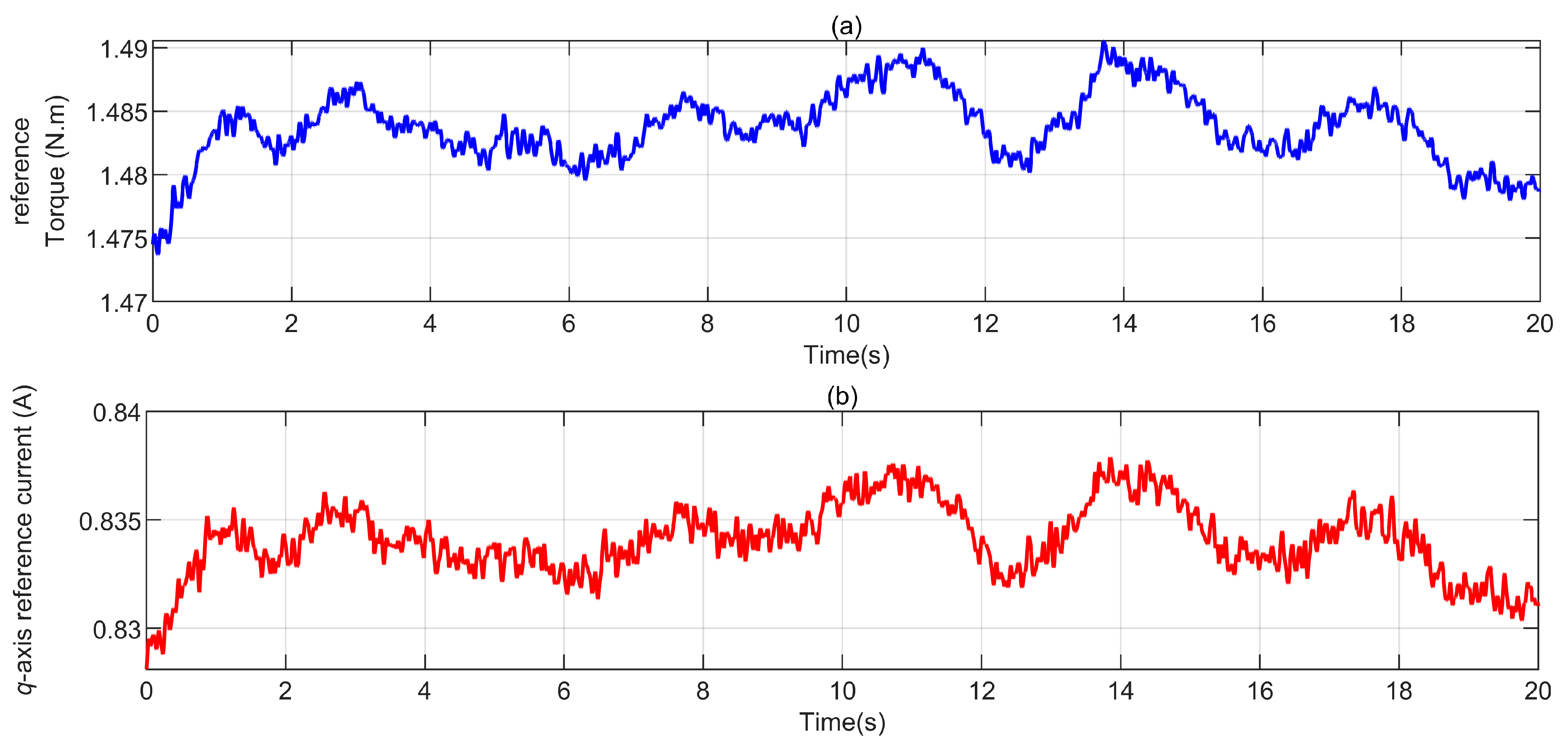
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lin, F.J.; Hung, Y.C.; Chen, J.M.; Yeh, C.M. Sensorless IPMSM Drive System Using Saliency Back-EMF-Based Intelligent Torque Observer With MTPA Control. IEEE Trans. Ind. Inform. 2014, 10, 1226–1241. [Google Scholar]
- Lu, X.M.; Iyer, K.L.V.; Mukherjee, K.; Ramkumar, K.; Kar, N.C. Investigation of Permanent-Magnet Motor Drives Incorporating Damper Bars for Electrified Vehicles. IEEE. Trans. Ind. Electron. 2015, 62, 3234–3244. [Google Scholar] [CrossRef]
- Yang, Z.; Shang, F.; Brown, I.P.; Krishnamurthy, M. Comparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives for EV and HEV Applications. IEEE Trans. Transp. Electron. 2015, 1, 245–254. [Google Scholar] [CrossRef]
- Ni, R.G.; Xu, D.G.; Wang, G.L.; Ding, L.; Zhang, G.Q.; Qu, L.Z. Maximum Efficiency Per Ampere Control of Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2015, 62, 2135–2143. [Google Scholar] [CrossRef]
- Ge, H.; Miao, Y.; Bilgin, B.; Nahid-Mobarakeh, B.; Emadi, A. Speed Range Extended Maximum Torque Per Ampere Control for PM Drives Considering Inverter and Motor Nonlinearities. IEEE T. Power Electron. 2017, 32, 7151–7159. [Google Scholar] [CrossRef]
- Jahns, T.M.; Kliman, G.B.; Neumann, T.W. Interior Permanent-Magnet Synchronous Motors for Adjustable-Speed Drives. IEEE Trans. Ind. Appl. 1986, 22, 738–747. [Google Scholar] [CrossRef]
- Jung, S.-Y.; Hong, J.; Nam, K. Current Minimizing Torque Control of the IPMSM Using Ferrari’s Method. IEEE Trans. Power Electron. 2013, 28, 5603–5617. [Google Scholar] [CrossRef]
- Nalepa, R.; Orlowska-Kowalska, T. Optimum Trajectory Control of the Current Vector of a Nonsalient-Pole PMSM in the Field-Weakening Region. IEEE Trans. Ind. Electron. 2012, 59, 2867–2876. [Google Scholar] [CrossRef]
- Dianov, A.; Kim, Y.-K.; Lee, S.-J.; Lee, S.-T. Robust Self-Tuning MTPA Algorithm for IPMSM Drives. In Proceedings of the 34th Annual Conference of IEEE Industrial Electronics 2008, Orlando, FL, USA, 10–13 November 2008. [Google Scholar]
- Morimoto, S.; Sanada, M.; Takeda, Y. Wide-speed operation of interior permanent magnet synchronous motors with high-performance current regulator. IEEE Trans. Ind. Appl. 1994, 30, 920–926. [Google Scholar] [CrossRef]
- Ahmed, A.; Sozer, Y.; Hamdan, M. Maximum Torque per Ampere Control for Buried Magnet PMSM Based on DC-Link Power Measurement. IEEE Trans. Power Electron. 2017, 32, 1311. [Google Scholar] [CrossRef]
- Lin, F.J.; Liu, Y.T.; Yu, W.A. Power Perturbation Based MTPA With an Online Tuning Speed Controller for an IPMSM Drive System. IEEE Trans. Ind. Electron. 2018, 65, 3677–3687. [Google Scholar] [CrossRef]
- Liu, G.H.; Wang, J.; Zhao, W.X.; Chen, Q. A Novel MTPA Control Strategy for IPMSM Drives by Space Vector Signal Injection. IEEE Trans. Ind. Electron. 2017, 64, 9243–9252. [Google Scholar] [CrossRef]
- Antonello, R.; Carraro, M.; Zigliotto, M. Maximum-Torque-Per-Ampere Operation of Anisotropic Synchronous Permanent-Magnet Motors Based on Extremum Seeking Control. IEEE Trans. Ind. Electron. 2014, 61, 5086–5093. [Google Scholar] [CrossRef]
- Lin, F.J.; Chen, S.G.; Liu, Y.T.; Chen, S.Y. A power perturbation-based MTPA control with disturbance torque observer for IPMSM drive system. Trans. Inst. Meas. Control 2018, 40, 3179–3188. [Google Scholar] [CrossRef]
- Mohamed, A.R.I.; Lee, T.K. Adaptive self-tuning MTPA vector controller for IPMSM drive system. IEEE Trans. Energy Convers. 2006, 21, 636–644. [Google Scholar] [CrossRef]
- Morimoto, S.; Ueno, T.; Sanada, M.; Yamagiwa, A.; Takeda, Y.; Hirasa, T. Effects and Compensation of Magnetic Saturation in Permanent Magnet Synchronous Motor Drives. In Proceedings of the 1993 IEEE Industry Applications Conference Twenty-Eighth IAS Annual Meeting, Toronto, ON, Canada, 2–8 October 1993. [Google Scholar]
- Consoli, A.; Scarcella, G.; Scelba, G.; Testa, A. Steady-State and Transient Operation of IPMSMs Under Maximum-Torque-per-Ampere Control. IEEE Trans. Ind. Appl. 2010, 46, 121–129. [Google Scholar] [CrossRef]
- Underwood, S.J.; Husain, I. Online Parameter Estimation and Adaptive Control of Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2010, 57, 2435–2443. [Google Scholar] [CrossRef]
- Liu, Q.; Hameyer, K. High-Performance Adaptive Torque Control for an IPMSM With Real-Time MTPA Operation. IEEE Trans. Energy Convers. 2017, 32, 571–581. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| P | pole pairs | 5 |
| d-axis inductance | 0.017961 H | |
| q-axis inductance | 0.023747 H | |
| Stator resistance | 0.768 Ω | |
| Magnet flux linkage | 0.2364 Wb | |
| base torque | 18.11 | |
| base current | 20.4286 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Lin, C.; Xing, J.; Jiang, X. Online MTPA Trajectory Tracking of IPMSM Based on a Novel Torque Control Strategy. Energies 2019, 12, 3261. https://doi.org/10.3390/en12173261
Sun J, Lin C, Xing J, Jiang X. Online MTPA Trajectory Tracking of IPMSM Based on a Novel Torque Control Strategy. Energies. 2019; 12(17):3261. https://doi.org/10.3390/en12173261
Chicago/Turabian StyleSun, Jianxia, Cheng Lin, Jilei Xing, and Xiongwei Jiang. 2019. "Online MTPA Trajectory Tracking of IPMSM Based on a Novel Torque Control Strategy" Energies 12, no. 17: 3261. https://doi.org/10.3390/en12173261
APA StyleSun, J., Lin, C., Xing, J., & Jiang, X. (2019). Online MTPA Trajectory Tracking of IPMSM Based on a Novel Torque Control Strategy. Energies, 12(17), 3261. https://doi.org/10.3390/en12173261