2.1. Thermal Disturbance inside Cables
In this paper, a thermal model including a cable line buried into the ground, cold-shrinkable joints, and the surrounding ground were used in order to evaluate the effects of ground faults on cable heating. Among them, double ground faults, commonly named cross-country faults (CCFs), have been considered, since the related fault currents are high and quite comparable to line-to-line fault currents. In [
13], the authors presented a 2D model only considering cable lines and joints, whereas in [
14], a full 3D model also including ground was developed, taking into account thermal exchanges between the ground surface and the external environment. In this Section, the authors firstly recall the model described in [
14], and then present the method to evaluate the influence of CR inside the joint during thermal transients caused by CCFs.
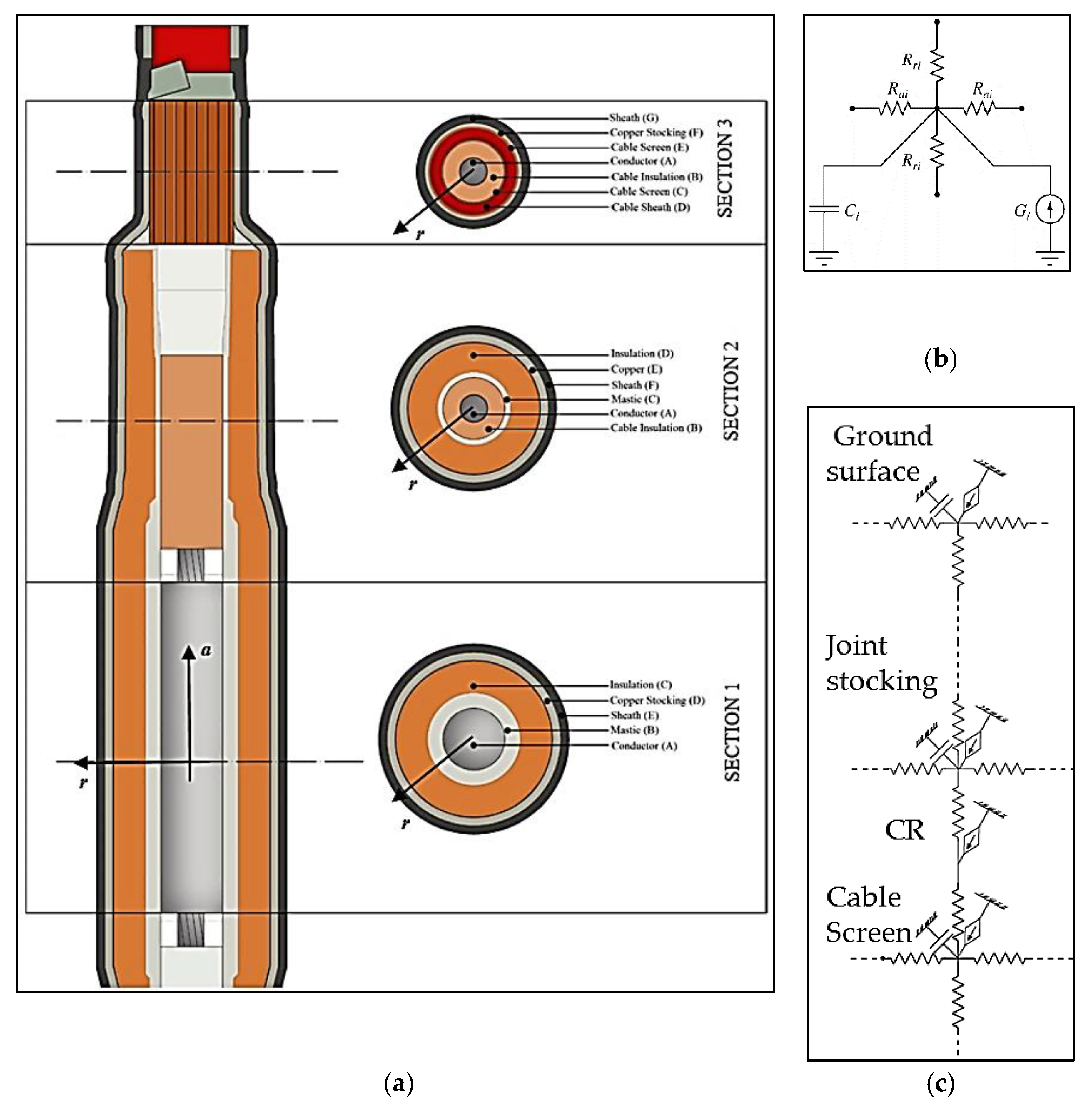
The shape of a cold-shrinkable joint is not straightforward, since it is made up of several parts and materials: a central part, with a conductive connector that joints the cable stretches, normally covered by a two-layer plate and high permittivity mastic layer (MNAC); a triple layer extruded ethylene-propylene diene monomer (EPDM) body, which is the cold-shrinkable part; a copper stocking for continuity of the cable screen; and a protective EPDM sheath.
In order to produce a detailed model, cable and joint have been subdivided in
m cylindrical volumes, with
m being the number of different materials along the radial direction (
r in
Figure 1a). The
m volumes have been discretized in
n equal parts along the axial direction, with
n being the fixed discretization step. Each volume is described by means of circuital elements, evaluated according to the Fourier equation:
where λ is the thermal conductivity,
c the volumetric heat capacity, and
w the heat source, which depends on temperature
T since it is related to the Joule losses of the conductive parts according to the following equation:
The thermal problem inside the joint and the cable has been solved in polar coordinates: considering the
i-th cylindrical elementary volume, the resistive bipoles
Rri and
Rai take into account the thermal resistance along radial and axial directions, respectively.
Ci represents the thermal capacity of the volume, whereas
Gi is a current generator reproducing the heat source due to Joule losses inside the volume, which depend on the temperature
T according to (2). Dielectric losses are negligible, as already demonstrated by the authors in [
13].
Quantities
Rri,
Rai, and
Ci are evaluated by:
where λ
i is the thermal conductivity,
Li is the length,
re,i is the external radius,
ri,i is the internal radius of the i-
th cylindrical volume, and
ci is the volumetric heat capacity of the
i-
th volume.
Rri of copper and aluminum conductors have been neglected. The attendant circuit is reported in
Figure 1b. The thermal resistance of the
i-th volume between cable and polyvinyl chloride (PVC) pipe,
Ri,cp, accounts for the convective, radiating, and conductive heat transfer and has been assessed by means of the empirical formula in [
15]:
where
U,
V, and
Y are constants whose values depend on the installation and are reported in [
15],
ϴmi (in °C) is the mean temperature of the air between the cable and the pipe and
Dei (in mm) is the external diameter of the considered volume. If more than one cable is simulated, an empirical coefficient multiplies
Dei in order to take into account the mutual heating between cables in the pipe: according to [
15], for three cables grouped in a conduit, the empirical coefficient is equal to 2.15.
Different arrangements are provided by the joint manufacturers (e.g., copper braid or socks mounted with a ring or a weld) in order to ensure screen continuity between the cable stretches; in all of these cases, a CR is introduced in both terminals of the joint.
In the literature, the evaluation of CR is performed by means of either cylindrical volumes, which have their basis as contact sections, or metallic films which are overlapped. The density of contact spots is investigated in [
16] and a generalized formula is defined in [
17]. Other papers studied the influence of pressure and temperature: experimental tests have demonstrated that contact resistance decreases if pressure and temperature increase, and this correlation is described by nonlinear relationships with hysteresis characteristics, as in [
18]. In the present paper, CR’s influence has been taken into account by increasing the locally produced Joule losses, as in [
8].
The effect of CR is evaluated, including a specific current generator, in the model, injecting a current equal to the heat flow produced by the Joule losses, as shown in
Figure 1c, which is an extract of the whole equivalent network (consisting of about 35,000 nodes) used in the simulations.
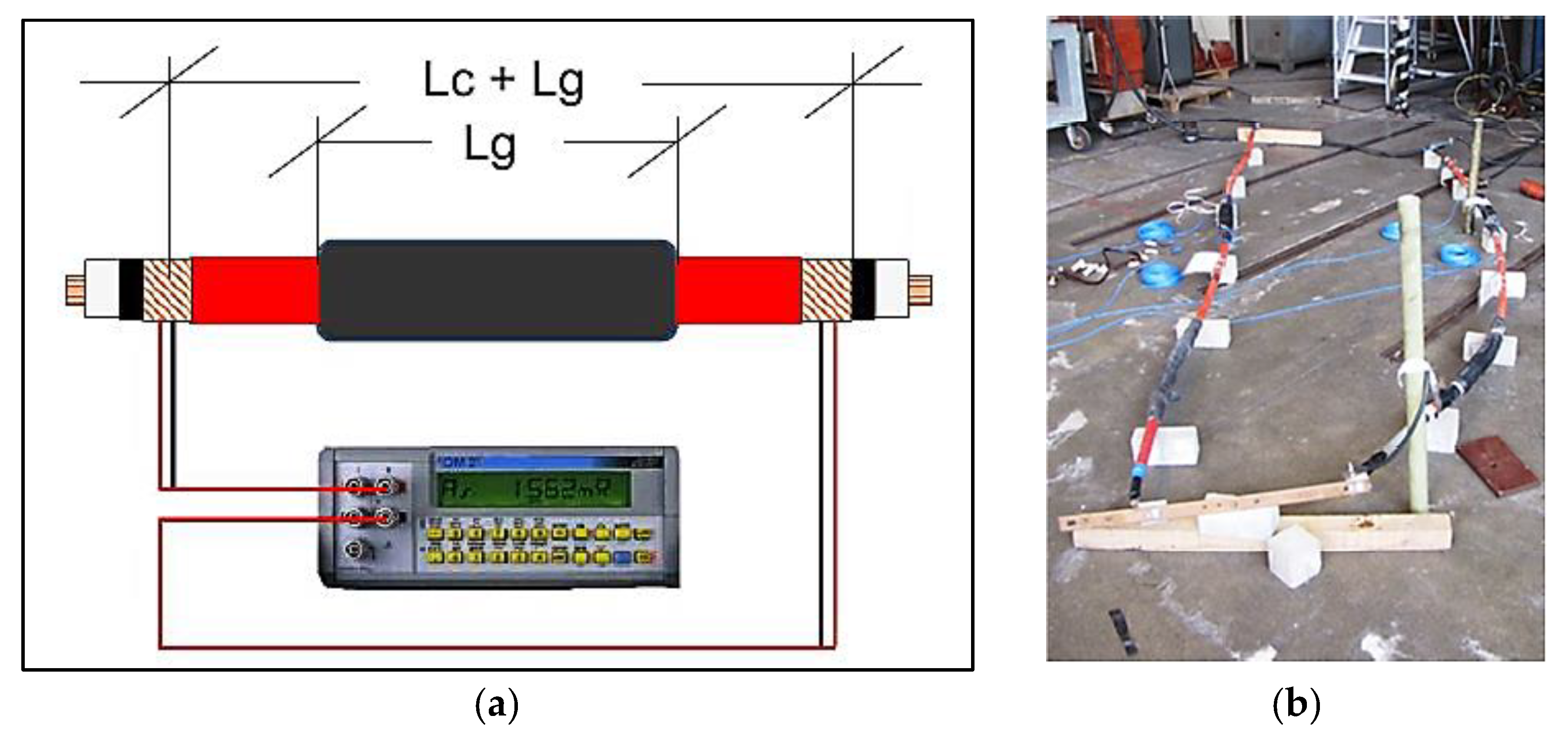
In this paper, in order to quantify the value of CR, measurements were carried out [
19]. Such measurements on different joints allowed us to define a range of CR values and to take into account the different arrangements. Data were collected by a Chauvin Arnoux C.A. 6547 digital meter (Chauvin Arnoux, Paris, France), as shown in
Figure 2. Results are reported in
Table 1.
In the test, both screen and joint stocking are made of copper, with 16 mm
2 and 100 mm
2 equivalent cross sections, respectively, whereas the temperature of the screen is 70 °C, leading to a 1.68 × 10
−8 Ω·m resistivity value. Moreover, the distribution of the joint CR between the two joint terminals is unknown. Starting from measurements in [
19], the joint CR was estimated according to the following equation:
where
Rs,T is the overall screen resistance measured by the digital meter according to the configuration in
Figure 2a,
r16 is the cable screen resistance per unit length (1.329 mΩ·m
−1 for the tested cable-joint system),
r100 is the joint stocking resistance per unit length (0.16 mΩ·m
−1 for the tested cable-joint system),
Lc is the length of the portion of the cable outside the joint,
Lc,g is the length over which the screen continuity is carried out (corresponding to
Section 3 in
Figure 1a) and
Lg is the joint length, as shown in
Figure 2a. Measured
Rs,T values, as well as the corresponding CR values calculated with (5), are reported in
Table 1.
2.2. Soil Thermal Model
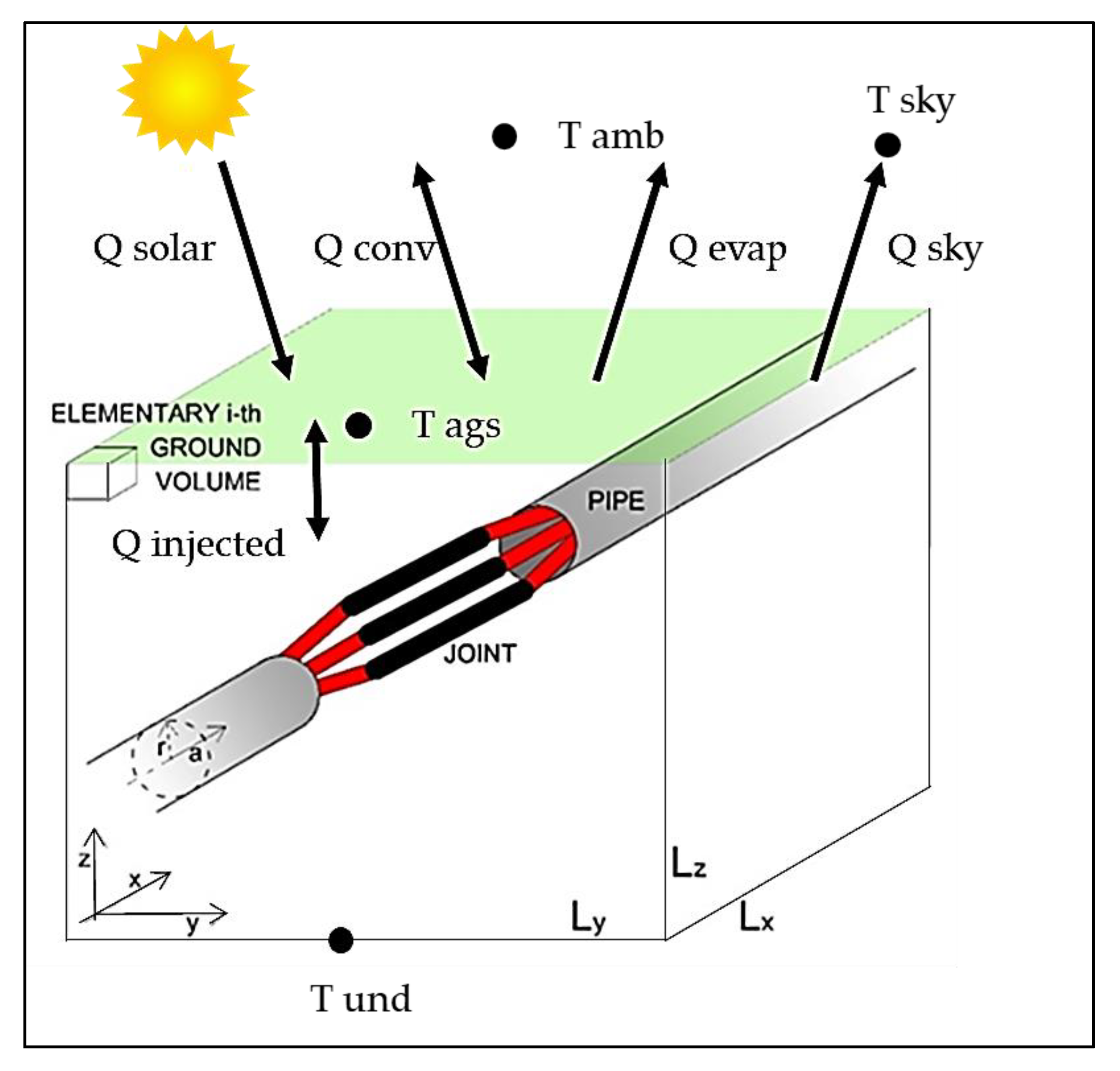
In order to represent real operating conditions (i.e., cables and joints buried in the ground), a 3D thermal model of the surrounding soil and its external surface was developed and linked to the cable-joint model described in
Section 2.1. According to
Figure 3, the model simulates a soil volume, in which cable and joint are buried at a certain depth;
Lx,
Ly, and
Lz are the volume dimensions along the
x,
y, and
z axes, respectively. The cable may be directly buried or buried in a pipe, as in
Figure 3.
Lx and
Ly are long enough to assume negligible thermal flows through the orthogonal surfaces; as a consequence, the heat flow at the terminals of the cable has also been neglected. The parallelepiped representing the ground has been subdivided into elementary volumes, each one simulated by resistances along the
x,
y, and
z axes, and one capacitance directly grounded, calculated as in the following:
In Equation (6), λg is the thermal conductivity of the soil and cg,i is the volumetric heat capacity of the i-th volume of soil, nx, ny, and nz are the number of subdivisions, and Sx,i, Sy,i, and Sz,i are the cross sections of the i-th element along the x, y, and z axes, respectively.
The thermal conductivity was considered as varying with the temperature, according to the simplified model proposed by Ocłoń et al. in [
20], by using the expression:
where λ
g,dry and λ
g,wet are the soil thermal conductivities in dry and wet conditions. In this paper, λ
g,dry and λ
g,wet are equal to 0.5 W∙K
−1∙m
−1 and 0.3 W∙K
−1∙m
−1, respectively.
Tref is the reference temperature, equal to 20 °C, and
Tmax,p is the maximum operating temperature, equal to 90 °C. Coefficients
a1 and
a2 depend on
Tref and
Tmax,p [
20].
Regarding the surfaces orthogonal to the
z-axis, the lower one was considered as isothermal at the undisturbed temperature (
Tund); therefore, along
z axis, resistances
Rz,i are connected to an ideal independent voltage generator representing the undisturbed temperature. According to [
21],
Tund is the temperature of the ground layer (about 8 m deep), below which the temperature remains practically constant throughout the year.
Tund has been evaluated as equal to 20 °C.
With respect to the upper surface orthogonal to
z-axis, weather conditions are taken into account by means of ideal current generators that inject the heat flow
Qin, evaluated as follows [
21,
22]:
Qsolar is the global solar radiation absorbed by this area, calculated with:
where α
g is the absorption heat coefficient and
G represents the short-wave global solar radiation, which is calculated as follows:
In Equation (10),
trise and
tset are the sunrise and sunset time of the day, respectively; the peak solar irradiance
Smax varies during the day and is evaluated according to [
22,
23] by means of the following equation:
In Equation (11),
I0 is equal to 1000 W/m
2, whereas
dn is a number representing the day of a year (number one is the 1st of January), δ the declination angle evaluated according to Spencer’s equation [
24],
L is the Earth heliocentric latitude (in rad), and ω is the hour angle (in rad).
Qconv is the sensible convective heat exchanged between air and the upper surface, and it depends both on soil surface temperature and on air temperature above the soil surface,
Ts and
Tags, respectively, evaluated by:
where
hconv is the convective heat transfer coefficient at the soil surface.
Qsky is the heat flux due to the long-wave radiation emitted by the soil surface to the sky and is calculated as:
where
hrad is the thermal radiation heat exchange coefficient and
Tsky the sky temperature [
25].
Finally,
Qevap, which is the evaporation heat exchange flux, depends on
Tags,
Ts, wind speed, ground cover, soil moisture content, and humidity; it is assessed by the equation [
26,
27]:
where
b1 = 103 Pa∙K
−1,
b2 = 609 Pa and
b3 = 0.0168 K∙Pa
−1;
rh is the relative humidity of the air;
f is a fraction of evaporate rate, varying between 0 and 1, and depends mainly on the ground cover and moisture. For bare soil,
f can be estimated as follows [
22]: for saturated soil,
f is equal to 1; for moist soil,
f ranges from 0.6 to 0.8; for dry soil,
f ranges from 0.4 to 0.5; for arid soil,
f ranges from 0.1 to 0.2.
The equivalent electrical network resulting from the cable, joint, PVC pipe, and soil models is then implemented considering both the PVC pipe, where cables are located, and joint sheath as isothermal surfaces, as in [
28]. The size of the network depends on the chosen discretization. In this work, the complete circuit model is composed of about 35,000 nodes. It is not possible to represent in detail the equivalent electrical network, even if an indicative section is shown, as in
Figure 1.
The equivalent electrical network is solved by a home-made software developed by the authors in the Scilab environment [
13,
14]. The system of differential equations is solved in a transient state through the backward Euler algorithm: according to the formulation in [
29], since each capacitance may be replaced by a voltage-controlled current source with a resistance in parallel, the equivalent network becomes purely resistive and is solved by nodal analysis. A more detailed description is given in [
14].

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}