1. Introduction
Container ports are important hubs for world commodity trade, where rubber-tired gantry (RTG) cranes undertake container operations in the yard area and are the most common lifting equipment in container ports. The conventional RTG crane uses a diesel generator (DG) as the sole source of energy; however, due to the variable load of RTG cranes, the fuel efficiency of DG is low and generates exhaust gas during operation. It goes against the principles of energy conservation and environmental protection. An RTG crane starts and brakes frequently while working, and has a high frequency of mutual conversion between potential energy and electric energy. When an RTG crane puts down a container, the lift motor acts as a generator, generating regenerated energy. The conventional RTG crane dissipates the regenerated energy through the braking resistor in the form of heat, resulting in a waste of the regenerated energy [
1]. The electric RTG cranes can feed this energy back to the grid [
2]. However due to the restriction of cable or rail, these RTG cranes can only work in a fixed area, losing the mobility to transfer to another yard.
The variable load characteristic of the RTG crane makes it very suitable for using energy storage devices. Using energy storage devices can save the mobility of RTG cranes. The energy storage devices can absorb the regenerated energy generated during the container descending phase and reduce the peak during the lifting phase, thereby reducing the energy dissipated by the braking resistor. Hybrid RTG cranes with energy storage devices can improve the energy efficiency and reduce fuel consumption accordingly.
Energy storage devices are widely used in various fields, such as electric vehicles [
3] and hybrid ships [
4]. Common energy storage devices in hybrid RTG cranes include the flywheel, lithium battery, and supercapacitor (SC). The flywheel energy storage technology is a mechanical energy storage method with a large fuel-saving effect. The flywheel energy storage device converts the regenerated energy into kinetic energy of the flywheel, and converts it into electric energy through a synchronous motor coupled with the flywheel rotor when energy needs to be released [
5]. The lithium battery is a kind of energy storage device with high energy density. The SC has a low energy density but a high power density and a high dynamic response [
6]. The SC can deal with dynamic loads and is suitable for fast storage and release of large amounts of energy.
In recent years, energy management methods of hybrid RTG cranes became research hotspots. In general, energy management methods can be divided into two types: rule-based methods and optimization-based methods.
The rule-based methods have the advantages of clear objectives, simple implementation, and strong real-time performance. In December 2016, Zhao et al. [
7] studied the energy storage system of a pure electric RTG crane, with structures incorporating either a lithium battery only or a lithium battery and SC hybrid. The hybrid RTG crane used a control strategy based on numerically efficient filtering. The control structure had two layers: the outer proportional integral (PI) controller controlled the current of the battery according to the difference between expectation and feedback voltage of the SC; the inner PI controller controlled the duty ratio of the direct current (DC)/DC converter according to the demand of the SC. In October 2017, Niu et al. [
8] studied a hybrid RTG crane consisting of a 128-kWh lithium battery and a 50-kW DG. The energy control strategy of a thermostat was used to set the state of charge (SoC) operating point of the lithium battery. According to the experimental results, the hybrid RTG crane could reduce fuel consumption by 57.37%. In August 2018, Wei et al. [
9] researched a hybrid RTG crane composed of a high-power lithium battery and a low-power DG. The warm-up and cooling time of the DG were considered in the maximum switching power management strategy of the hybrid system. According to the experimental and statistical data, the average fuel saving rate of the hybrid RTG crane was 73.9%. In February 2019, Bolonne et al. [
6] studied the energy management strategy of a hybrid power RTG crane consisting of a 200-kW variable-speed diesel generator (VSDG), a 55-kW lithium battery. and a 48.3-F SC. By using the state machine control method, the SoC of the lithium battery was narrowed by 40% to 60%, and the SoC of the SC was kept at about 70%. A small range of SoC can avoid deep discharge and overcharge of the lithium battery, which is beneficial to prolong the cycle life. This control method allowed the hybrid RTG crane to save fuel consumption by 57.5%, compared to a conventional RTG crane.
The optimization-based methods can work better, but the calculation is complicated, and the control system is highly demanding. This type of method has various algorithms and has room for further improvement. In March 2016, Pietrosanti et al. [
10] studied the optimal energy management strategy of a hybrid RTG crane equipped with a flywheel energy storage system and a DG. According to the statistical distribution of loads, under the condition of uncertain electrical load duration, the optimal algorithm was used to optimize the use of flywheel storage energy. In simulation, the power of the DG was 200 kW, the flywheel could store 3.34 MJ of energy, and the proposed optimal control strategy could reduce the energy consumption by 38.47%. In October 2017, Alasali et al. [
11] studied the energy management of an electrified RTG crane with an energy storage system (ESS). The ESS stored energy during the low-power demand period of a day and released energy during the high-power demand period to reduce the peak demand and electricity cost. The load curve of the RTG crane was predicted using the model predictive control (MPC) method. Based on real-time RTG crane demand and electricity price data, the optimal output of the ESS could be figured out, and the annual electricity bill could be reduced by 7.18%. In October 2018, Alasali et al. [
12] introduced a method based on stochastic optimization to study the control of a network of electrified RTG cranes equipped with an ESS. An optimal energy control strategy based on a stochastic model predictive control (SMPC) algorithm was proposed to improve the economy of the network of RTG cranes. According to the results, the SMPC controller achieved a better peak reduction compared to the MPC and set-point controllers. In May 2019, Alasali et al. [
13] presented an optimal management system based on genetic algorithm (GA) for the control of a network of electrified RTG cranes equipped with ESS. The stochastic optimal controller was off-line and did not require a load forecast model. The analysis results showed that the GA control model could achieve better peak reduction than a set-point controller.
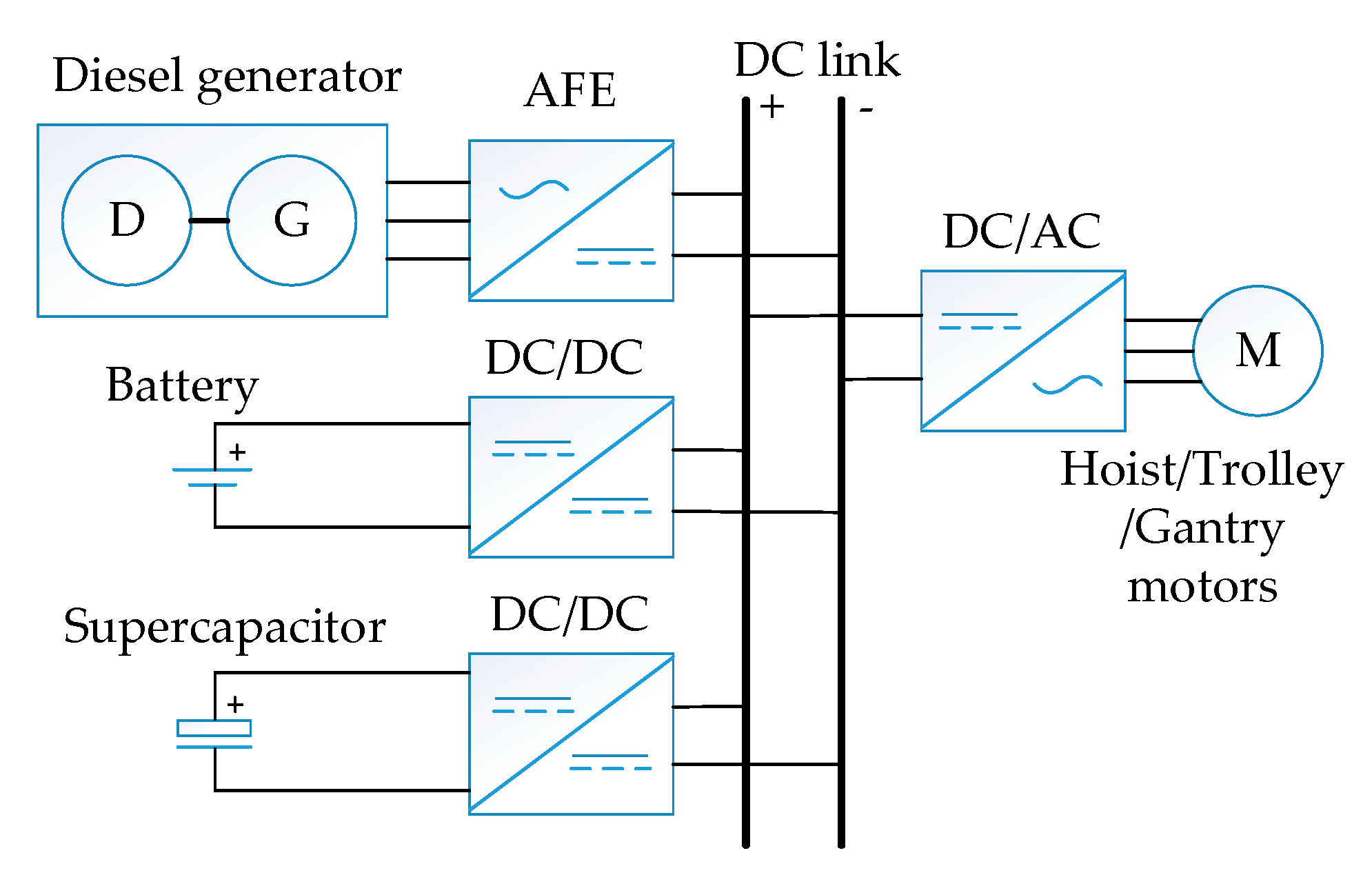
The output power of a conventional RTG crane’s DG can reach more than 400 kW to meet the maximum lifting power demand. However, the RTG crane has plenty of low load time during operation, where the average power is less than 50 kW. Energy waste is caused by running a high-power DG at a low load. Reducing the size of the DG can reduce fuel consumption and improve fuel efficiency at low load. In order to combine the advantages of the high energy density of a lithium battery and the high power density of an SC, and to fully absorb the regenerated energy, a hybrid system composed of a DG, lithium battery, and SC is studied. Compared with the hybrid system composed of a DG and SC, adding a lithium battery can share part of the average power, reduce the size of the DG, and also absorb part of the regenerated energy. Compared to the system consisting of a DG and lithium battery, adding an SC can deal with dynamic load and reduce the impact of high-current charging and discharging on battery life. In the hybrid system consisting of the three types of devices, the DG provides the average power in its optimal efficiency range, the lithium battery provides the remaining average power that the DG cannot cover, and the SC provides the dynamic power.
The complex relationship between the three different devices challenges the energy management method. The energy management method of the hybrid system is not only required to improve the energy efficiency, but is also expected to prolong the cycle life of the lithium battery. When studying the energy management method, in addition to considering the unique characteristics of each device, their respective preferences should also be fully taken into account. The three devices are modeled as three independent agents that express needs and pursue preferences, and a multi-agent system (MAS) is established. The MAS technology provides a rapid response to condition changes and supports reconfigurability [
14,
15]. In the MAS, each agent only has a local target [
16], i.e., the agent in the MAS only pursues its own goal without considering the overall target of the system.
For a MAS, a decentralized decision-making method or control strategy is naturally needed. Game theory is a mathematical method for studying the interaction between self-interested players/agents. It focuses on decision-making, and each player’s decision can affect the outcome of other players’ decisions [
17]. By choosing a strategy, each player strives to achieve its goal [
18]. At present, game theory is mostly used for the energy management of smart grids [
19,
20,
21]. The coordinated operation of the hybrid system can be achieved by using a multi-agent strategy and with the help of computer technology [
21]. Non-cooperative game theory can be used to analyze the strategy-making process of independent players with conflict preferences [
22]. In this study, game theory is used to find the equilibrium strategy that makes the devices work in a coordinated state, and the energy management problem is transformed into a non-cooperative current control game. In the MAS, three devices reach an equilibrium through the game, i.e., the Nash equilibrium. The Nash equilibrium is a balanced solution that takes into account the different preferences of devices and is a strategic balance point for all players to achieve optimal benefits. Using game theory can meet the requirements of hybrid system energy management.
In this paper, a new energy management method is proposed based on game theory. The proposed configuration is based on a low-power DG, a lithium battery pack, and an SC pack. The SC is used to supply transient demand to minimize the current on the battery and to reduce the effect of high current on battery life. The method is established and simulated in Matlab (R2014a, The MathWorks, Inc., Natick, MA, United States). The proposed method is dedicated to achieving higher efficiency while improving the life span of the hybrid energy storage system. This work has the following key contributions:
- (1)
A new hybrid RTG crane with three energy sources is developed to investigate the fuel consumption reduction and energy efficiency improvement. This will contribute to the limited literature focused on hybrid RTG cranes equipped with multiple energy storage devices.
- (2)
This work is the first to use the game-based method to solve the energy management problem of hybrid RTG cranes. The proposed method is relatively simple and has the flexibility of expanding or reducing the number of controlled devices.
The structure of this paper is organized as follows: the schematic of the hybrid RTG crane system is described in
Section 2. Models of the devices are introduced in
Section 3.
Section 4 discusses the sizing of the hybrid system devices. The energy management method based on game theory is presented in
Section 5.
Section 6 analyzes the different working conditions of RTG cranes. Finally, a summary of the work is presented in
Section 7.
5. Hybrid System Energy Management Method
This section presents the energy management method based on game theory. The basic assumption of game theory is that the players in the game are rational. A rational player means that his purpose of a specific strategy is to maximize his own benefits while considering the strategies of other players. These rational players constitute a game. The Nash equilibrium is a strategic balance point for each player to achieve maximize benefits. A common phenomenon in life can be used to explain the Nash equilibrium, e.g., price wars. Several manufacturers producing the same product form a stable state in which the price of the product remains basically the same. In this case, each manufacturer’s strategy for the price forms a Nash equilibrium. If one of the manufacturers breaks the equilibrium and begins to cut prices in order to gain more profit, the other manufacturers follow up and push each other down. The manufacturer who initially cut the price eventually suffers losses. Thus, no manufacturer takes the initiative to break the equilibrium.
5.1. Control Schematic and Devices Preferences
In the game, the device’s strategy is the magnitude of its output current. Note that the currents here and below are the values observed from the DC bus side. For the lithium battery and SC, the current may also be negative, which means charging.
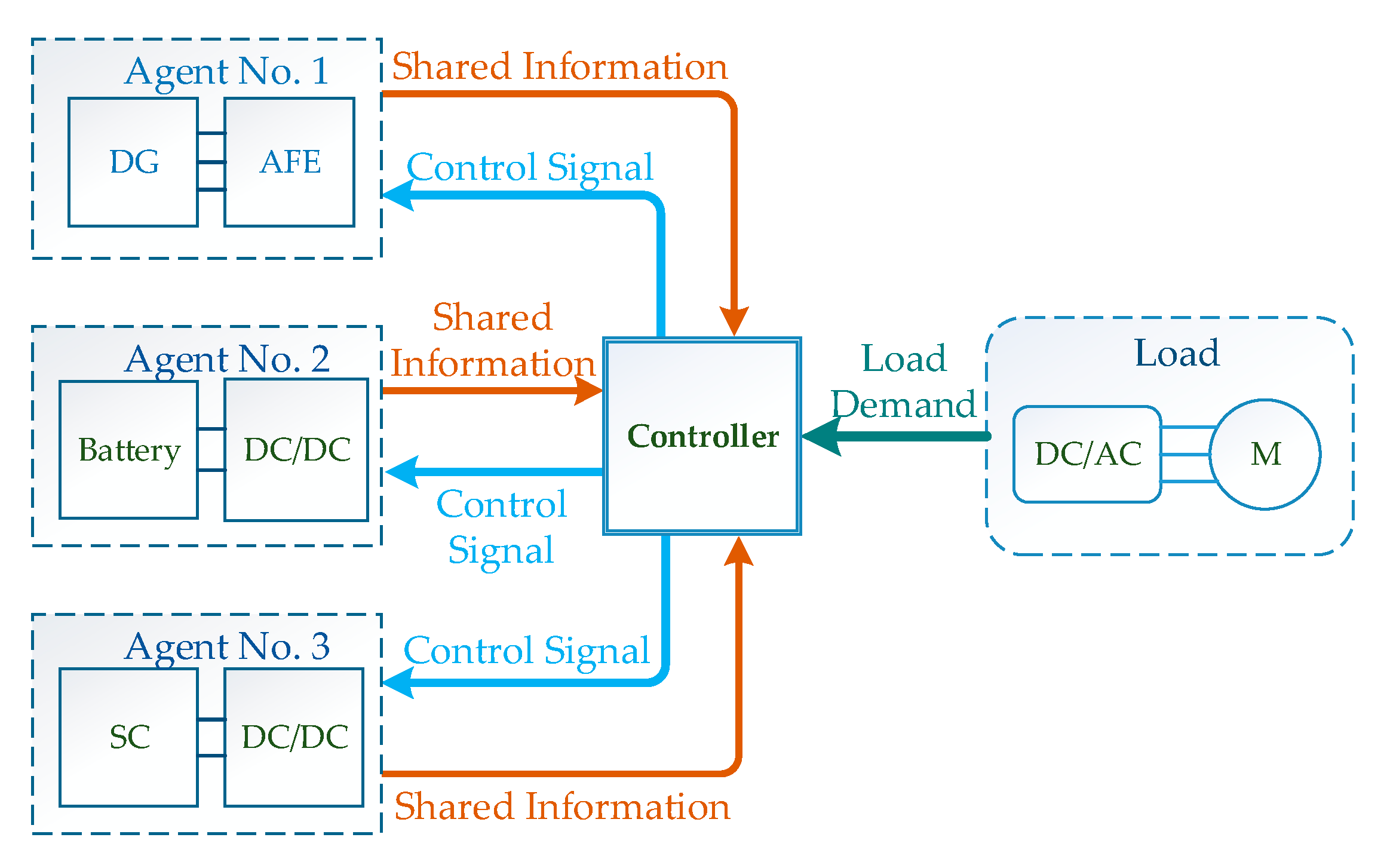
Figure 7 presents the schematic of the proposed energy management method. The DG, lithium battery, and SC are the three agents taking part in the game. The three devices output the shared information to the controller, and the controller calculates their respective strategies. Then, the controller converts the results of the game into control signals to control the three devices. The shared information is discussed in
Section 5.3.
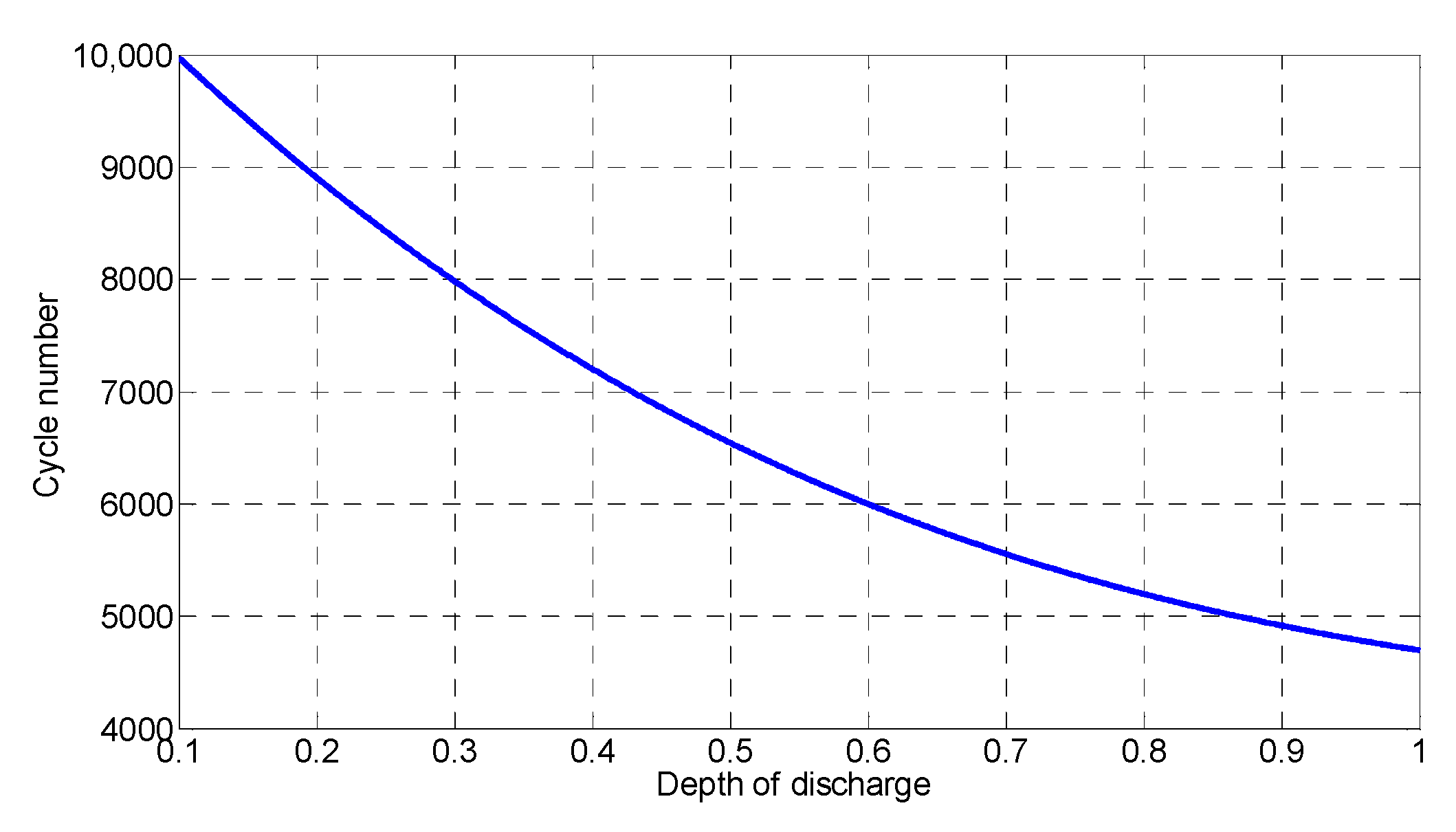
The preference of a device depends on its unique characteristic. The DG can work for a long time, but the energy efficiency and emissions of the DG depend on the generator load; when the DG changes its load, its energy efficiency is low and the exhaust gas emission increases [
32]. It is of great significance to make the DG work in the optimal efficiency range and to reduce the number of starts and stops to improve fuel efficiency. Therefore, the preference of a DG should be to improve fuel efficiency, and the best strategy is to work at rated power. Due to the high price and short cycle life of a battery pack, in order to improve the economic effect of the system, the preference of the battery pack is to prolong the service life. The factors affecting the cycle life of a lithium battery include temperature, depth of discharge, and discharge rate. In addition to the temperature factor, the best strategy for the battery pack is to control the depth of discharge and reduce the discharge rate. The SC has long cycle life but limited energy density. As an auxiliary energy storage device, the SC can provide fast and efficient energy output, and improve the efficiency and dynamic response performance of the whole system. Thus, the preference for the SC is to provide dynamic load. After determining the preferences of devices, the benefit of each device can be maximized by the game, and the efficiency is improved for the whole system.
5.2. Utility Function
The relationship between the strategy and benefit of an agent is formulated as a utility function. In the game theory, each player measures the benefit of the strategy through its utility function. The utility function is typically defined via quadratic form [
33]. There are other forms of utility functions in the literature, such as linear functions and logarithmic barrier functions [
34,
35]. Linear functions may not guarantee a unique Nash equilibrium. Compared with logarithmic functions, quadratic functions are simpler, and the amount of computation is smaller. In this work, the quadratic form was chosen because the concavity of quadratic functions has the property of guaranteeing the existence and uniqueness of the Nash equilibrium [
24]. It is a widely used form to model the preference of players [
33,
36]. The quadratic form of the utility function is as follows [
24]:
where
is the utility function,
is the device output current, and
,
, and
are the coefficients. These coefficients are different according to the characteristics of devices in hybrid systems.
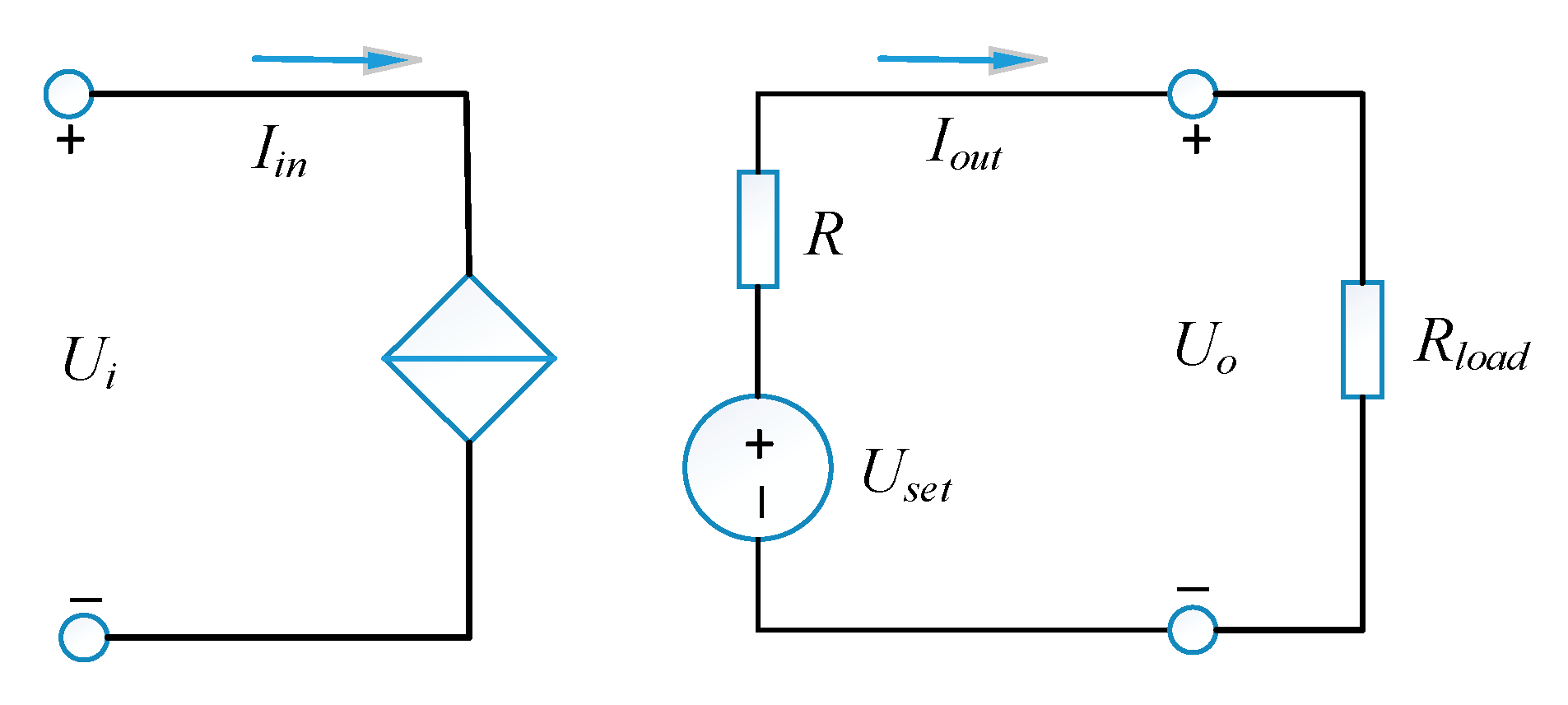
Applying this theory to the control of hybrid cranes, the utility function can be designed to reach its maximal value when the output currents of the hybrid system devices are equal to their output currents under the best strategies. In the hybrid RTG crane consisting of a DG, lithium battery, and SC, it is significant to ensure that the outputs of the devices meet the requirement of the crane’s work. The error between the currents supplied by the devices and those required by the crane is taken as one term of the utility function. The introduction of the error term into the utility function can make the decisions of the devices converge in the direction of reducing the error. The influence of the error on different devices is discrepant due to their different characteristics. In other words, for each device, the coefficient of error is different. In order to clarify the meaning of each term, the utility function is written in the form of a quadratic multinomial. The utility function in this hybrid RTG crane is designed as follows:
where
is the current strategy variable of the device,
is the expected current strategy of the device,
is the adjustment coefficient,
is the current required by the load,
is a constant, and
is the sum of the currents provided by the three devices. In a stage of the game, before the device decides its strategy, the error in its utility function is calculated first as a specific value. Thus, the utility is in quadratic form. The currents provided by the three devices
are calculated as follows:
where
,
, and
are the currents supplied by the DG, lithium battery, and SC, respectively. The positive value represents the release current, and the negative value represents the absorption current. In the utility function, the first item reflects the satisfaction of the expected strategy. The closer it is to the expected strategy, the higher value the utility can achieve. The second term reflects the error between the load demand current and the total output current. The smaller the error is, the larger the value the utility function can achieve. In order to improve the utility, each agent has a tendency to reduce the error. The coefficient
reflects the sensitivity to the error. The larger the coefficient is, the more sensitive it is, i.e., a larger current change can be used to reduce the error. The last term
is a constant that keeps the utility function positive.
According to the form of the utility function defined in Equation (7), the utility function of the DG is as follows:
The utility function of the lithium battery is as follows:
The utility function of the SC is as follows:
In these three equations,
,
, and
are the expected currents of the DG, lithium battery, and SC, respectively, whereas
,
, and
are the coefficients that adjust the influence of the error on the utility function. The specific values in the simulation are given in
Section 6.1. As a player in the game, the preference of the DG is to improve its fuel efficiency. Its strategy is to work at rated power and maintain an optimal output current, as shown in Equation (12).
where
is the output current of the DG operating at rated power.
The lithium battery in the hybrid system provides a partial average power. The preference of the lithium battery is to prolong its cycle life. Under the premise of guaranteeing the variation range of SoC, the expected strategy
of lithium battery is adjusted according to the power demand. According to the working characteristics of hybrid RTG crane, the expected strategy of the lithium battery is shown in Equation (13).
where
is the DC bus voltage, and
is the output power of the lithium battery. When the power of the DG is greater than the average power demand, excess power can be used to charge the lithium battery.
The SC can fill the peak power demand gap that the DG and lithium battery cannot provide due to its high dynamic response speed. Its preference is to provide dynamic power. In order to guarantee the response speed to the dynamic power demand, the expected strategy of the SC should be zero. Thus, the SC maintains the same response speed to charge and discharge, as shown in Equation (14).
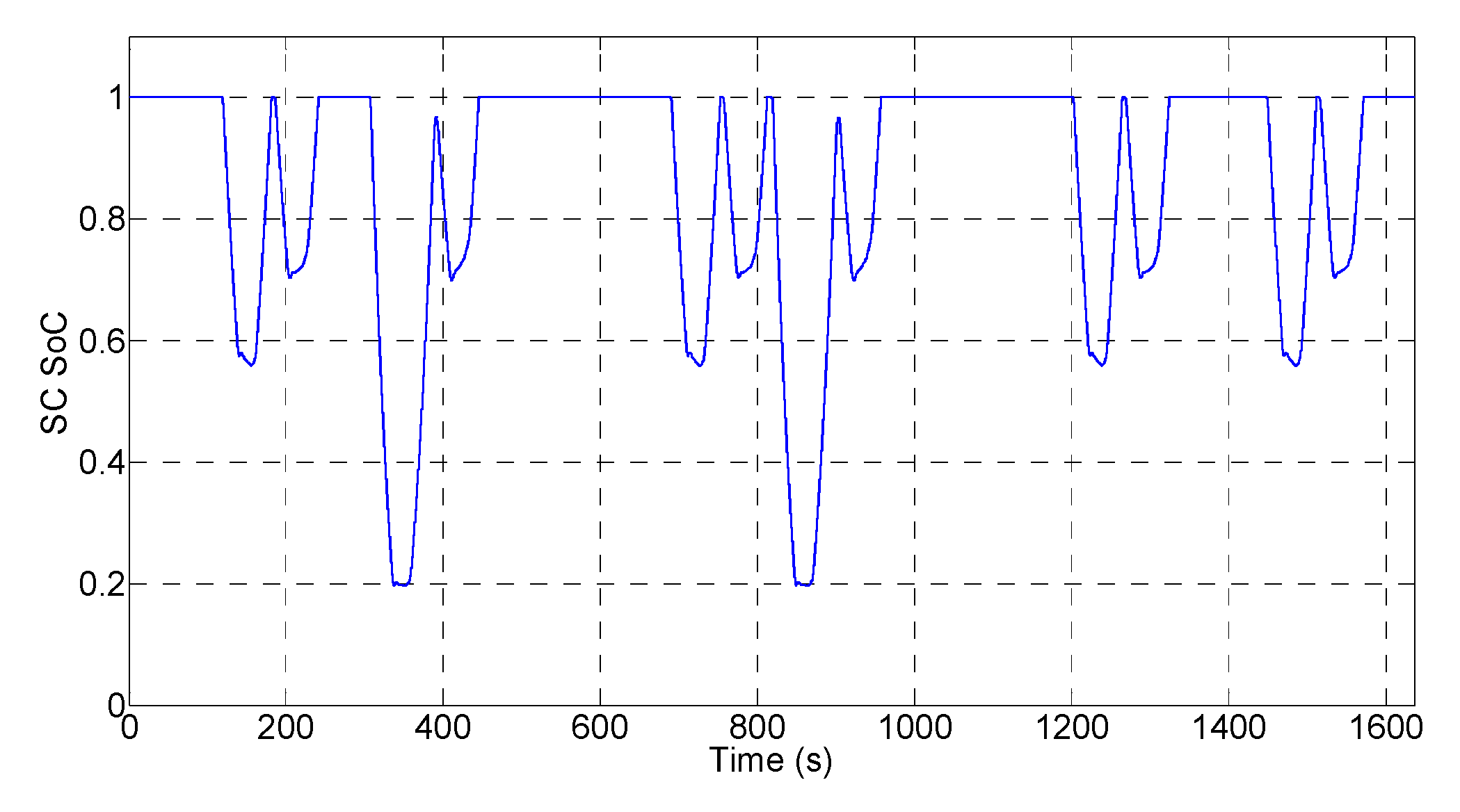
The SC acts as a power buffer; in order to prevent the SC from running out of energy, it is expected that the energy released by the SC after an operation cycle is equal to the absorbed energy, as shown in Equation (15).
where
is the SC energy,
is the sampling time, and
is the duration of the operation. The higher the SoC of the SC is, the higher its efficiency is. When the SoC is 1, the SC has the highest charge and discharge efficiency [
37]; thus, the SC achieves full charge, which is beneficial for improving the hybrid system’s efficiency.
5.3. Information Sharing
In the game, each player has to share its strategy information to other players, i.e., , , and are shared information. The utility function of each device contains the shared information. If one of the devices wants to increase its benefit, it needs to consider the strategies of the other two devices. When an equilibrium is reached, the error between the demand and the total output is zero. If a device wants to change its strategy while other devices’ strategies remain the same, it is bound to increase the error and reduce the device’s benefit. Thus, when the equilibrium is reached, all devices have no incentive to change the strategy.
5.4. Nash Equilibrium
The utility functions of the three devices are
,
, and
. The game can be described in the form of
[
38]. By adjusting the strategies between devices, the non-cooperative current control game reaches the Nash equilibrium. The Nash equilibrium is a compromise load distribution that balances the different preferences of each device [
39]. The strategy variable space is a non-empty tight convex set in Euclidean space, and the utility is a continuous quasi-concave function of the strategy; thus, the non-cooperative current game has a pure strategy Nash equilibrium [
34]. By solving the Nash equilibrium, the hybrid system works at an optimal balance point. Working at this point, the system is efficient and helps to prolong battery cycle life.
5.5. Solving Nash Equilibrium
In this paper, an algorithm for solving the Nash equilibrium is designed based on the iterative search method, which is a commonly used method for solving Nash equilibrium [
20,
24,
34]. In the multi-round process of a single stage of the game, each player adjusts its utility function based on the shared information and makes the current strategy that maximizes its benefit. The error reflects the influence of the strategy on the result. During the iterative process, the error is continuously reduced, and the strategies of the players converge to the stable solution, i.e., the Nash equilibrium solution. The Nash equilibrium solution is shown in Algorithm 1.
| Algorithm 1. Nash equilibrium solution algorithm |
| 1. Initialize , , and . |
| 2. Input power demand , each player determines its utility function. |
| 3. Save historical strategies, , , and . |
| 4. The players calculate the , , and that maximize their utility function. |
| 5. Share information; if , , and , go to 7; else, go to 6. |
| 6. Each player adjusts its utility function based on the shared information; go to 3. |
| 7. Get the Nash equilibrium; output results, , , and . Go to 2. |
According to the above process, it can be concluded that the time complexity of the algorithm is
. The average calculation time is reported in
Section 6.5. After inputting a power demand, a new stage of the game is started, and each player adjusts its expected strategy according to the input power demand and then determines the utility function. The maximum value of the utility function can be obtained by the derivative equation. Taking DG as an example, the strategy that maximizes its utility function
can be obtained by the following equation:
According to Equation (9) and simplifying, the following equation can be obtained:
According to Equation (17), under the premise that the load demand , the lithium battery output currents , and the SC output currents are known, the strategy that maximizes the utility of the DG can be calculated directly. The calculations of the other two devices are similar.
After the three devices obtain their strategy, the strategy information is shared. If the difference between two procedures is less than the threshold
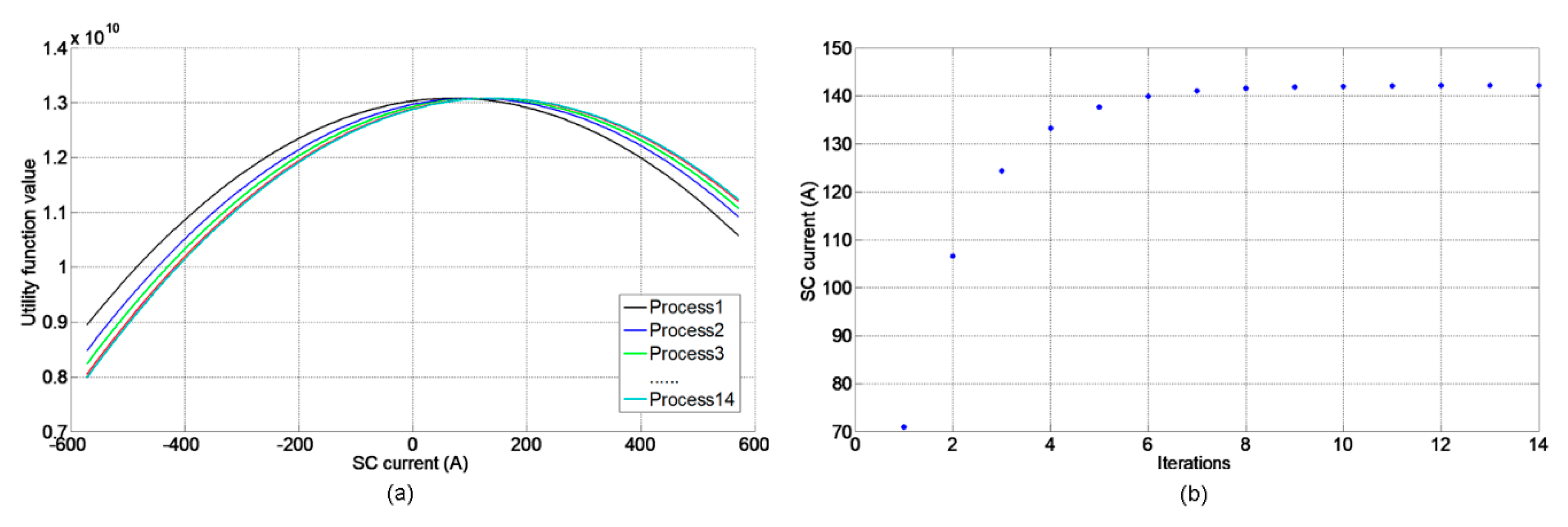
, it is considered that the game reaches a stable state, i.e., Nash equilibrium. If the difference of a device is greater than the threshold, the utility function needs to be adjusted to recalculate the strategy to reduce the difference. In that stage of the game, taking the SC as an example, the adjustment process of the utility function and the strategy are shown in
Figure 8. It can be seen from
Figure 8a that, as the game progresses, the utility function of the SC is adjusted continuously. This reflects the influence of the change in device strategy on the utility function. In
Figure 8b, the strategy of the SC gradually approaches a stable value. When the strategies of the three devices reach stable values, the Nash equilibrium of the game is reached.
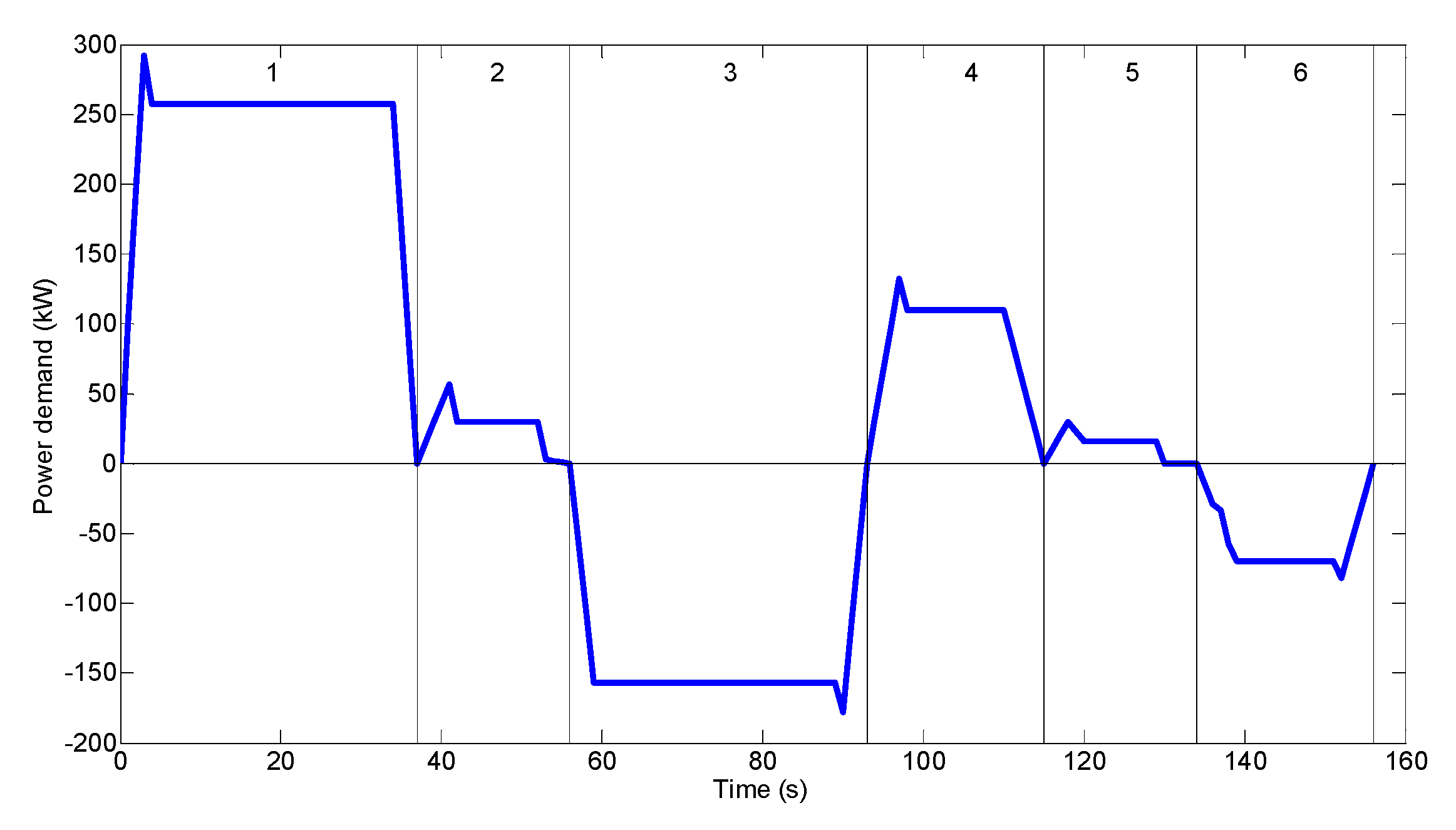
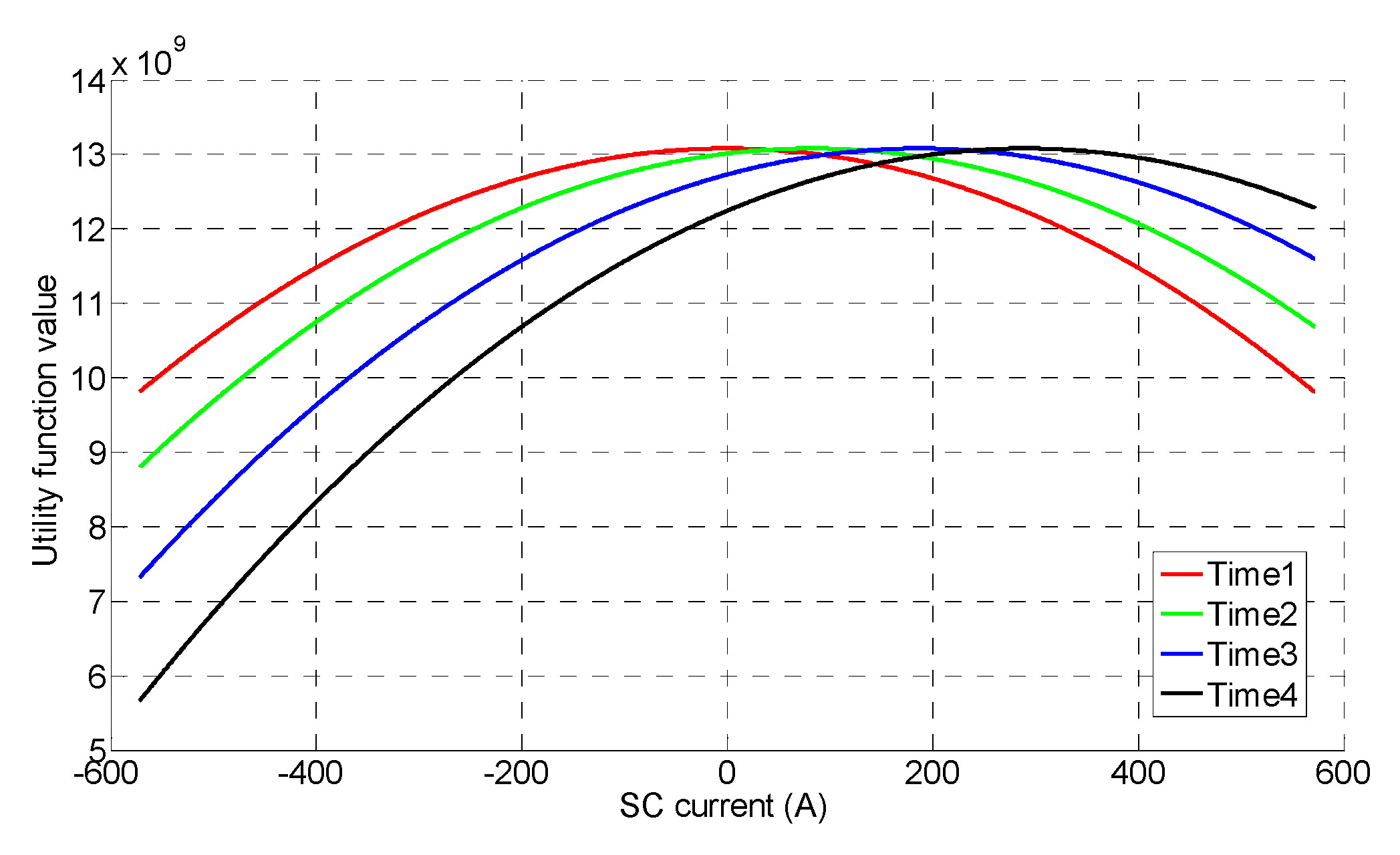
After reaching the Nash equilibrium, the system waits for the power demand input at the next moment to enter a new stage of the game. Each control moment is considered as an independent stage, because, in actual operation, although the power demand inputs are the same, the state of the device may be different. For example, if the SoC of the battery is constantly changing, the decision of the device may be different at different SoCs. Thus, even for the same power demand input, a new stage of the game is needed. In a new stage, each device is concerned about how to make a strategy to maximize its benefit. At each control instant, the Nash equilibrium is iteratively obtained according to the Nash equilibrium solution algorithm. Taking the first four seconds of the RTG crane operation as an example, the change in SC utility function is shown in
Figure 9. According to
Figure 2, the first four seconds are the acceleration phase, where the power demand is increasing. The maximum value of the utility function in
Figure 9 is also moving in the direction of increasing the SC current. This shows that the utility function is adjusted for different power requirements. Thanks to the rapidity of the Nash equilibrium solution algorithm, even if a new game is played, it can meet the real-time requirements.
5.6. Flexibility and Expansibility of the Energy Management Method
The proposed energy management method can be flexibly applied to different hybrid system configurations. For example, in order to meet the different working characteristics of different ports, the configuration of the hybrid system is different. For this method, the only difference is that the utility function of each device is different. By adjusting the utility function of each device, this method can be easily applied to different configurations of hybrid systems. If only two devices are used to form a hybrid system, two devices can still form a game. Through the game, two devices can work in a coordinated and stable state.
Due to the dispersion of this method, the game theory approach can be extended as a general solution to manage complex hybrid systems and involve more devices [
39]. In order to add a new device to the hybrid system, one only needs to write the utility function according to Equation (7), obtain the expected strategy based on its characteristics, and then adjust the coefficient according to the simulation and experimental results.
7. Conclusions
According to current research, this paper is the first to apply the game theory to the energy management of a hybrid RTG crane. This paper also discusses the hybrid system structure and device sizing issues. The hybrid RTG crane consisted of a 20-kW DG, a 73.9-kWh lithium battery pack, and a 22-F SC pack. The hybrid RTG crane configuration proposed in this paper has good fuel economy and lower initial investment. The game method was used to solve the energy management problem of the hybrid system, such that the devices could run in coordination and take into account the preferences of the devices, i.e., the DG wants to improve fuel efficiency, the lithium battery wants to increase cycle life, and the SC wants to provide dynamic power. The fuel efficiency of the DG was improved due to its small size and stable operation at rated power, avoiding the low-efficiency range. The long cycle life of the lithium battery was due to the charge or discharge current being small, and the range of SoC variation being narrow. The SC acted as a power buffer, releasing power when lifting the container, absorbing power when lowering the container, and returning to full charge after an operation cycle. The proposed method has the advantages of low computational complexity, good flexibility and extensibility, and the prospect of practical application.
Further work might be aimed toward the study of a network of electrified RTG cranes [
2]. Each crane in the network can be treated as a separate agent, and game theory methods for the energy management of a network of cranes are very interesting. Another prospect of future research might be modeling humans as players to take part in the game, considering the effect of human operation, taking the hybrid RTG crane as a human–machine system, and studying the preferences and characteristics of humans in the system. Machine learning techniques and representations of observations of a visual input [
42,
43] can be used to study the effects of human behaviors on the Nash equilibrium and the impact of manual operation delay on the whole system.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}