Rotor Speed Observer with Extended Current Estimator for Sensorless Control of Induction Motor Drive Systems




Abstract
:1. Introduction
2. Dynamic Model of IM
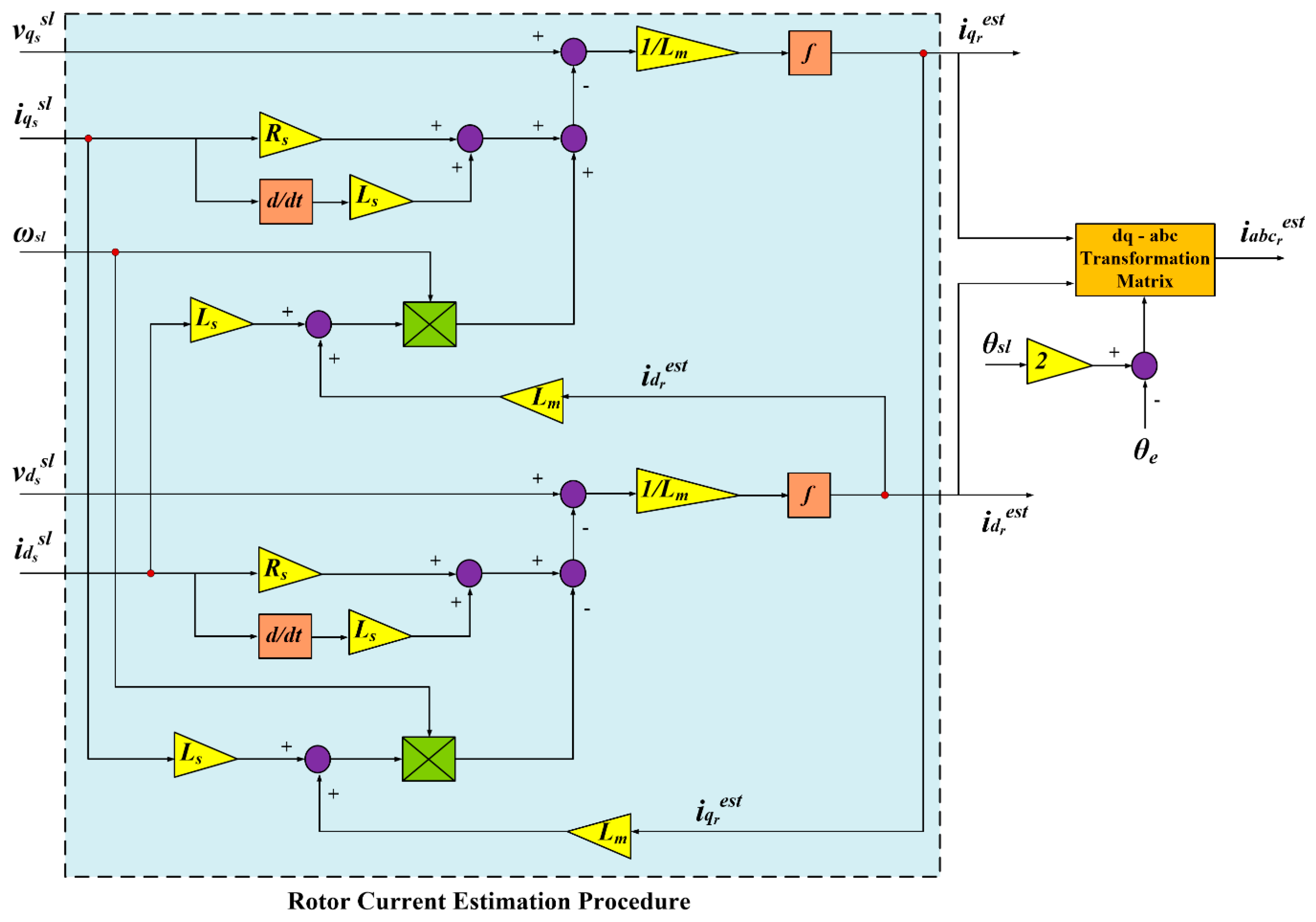
3. A Simple Effective Estimation Method for Rotor Current Prediction
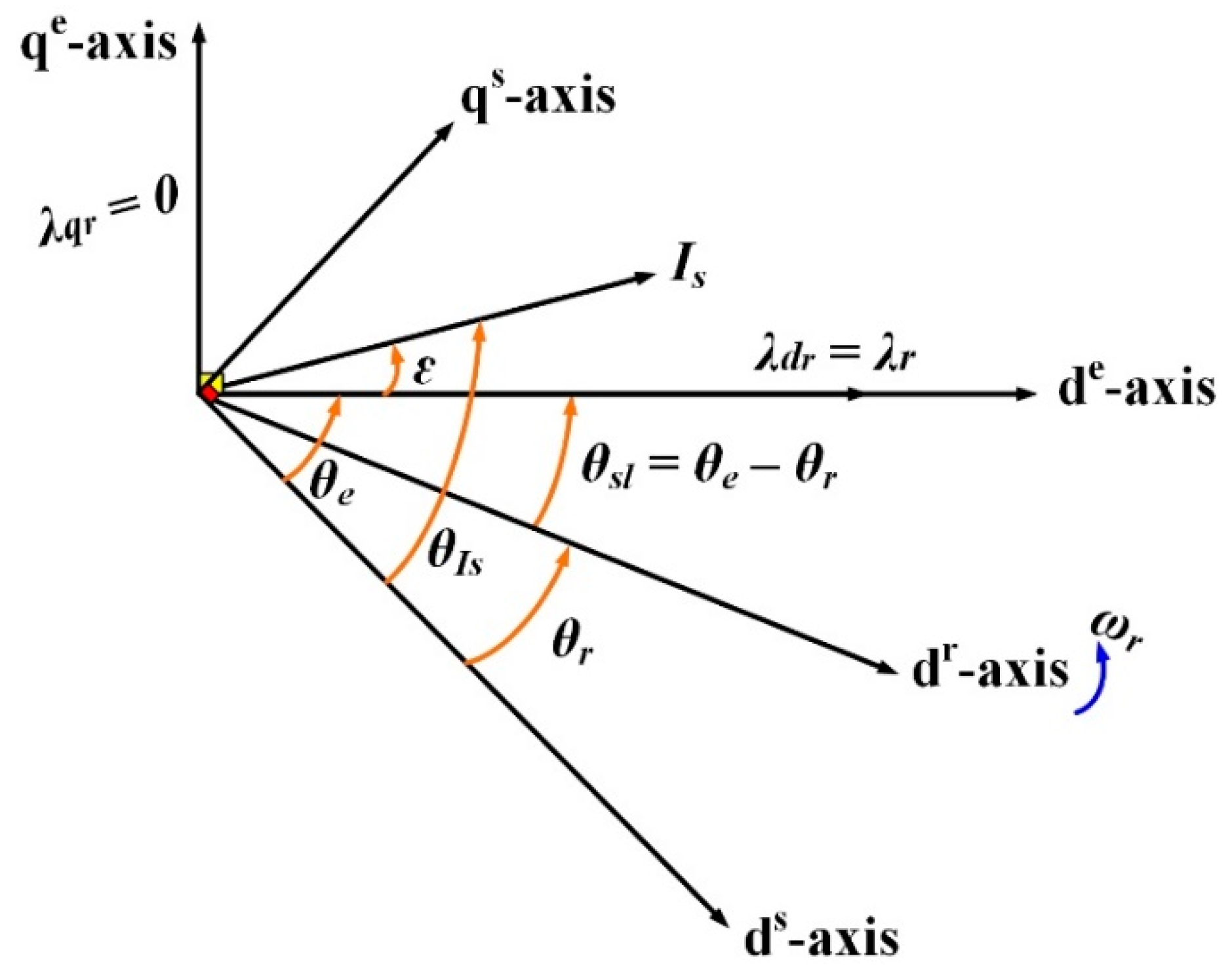
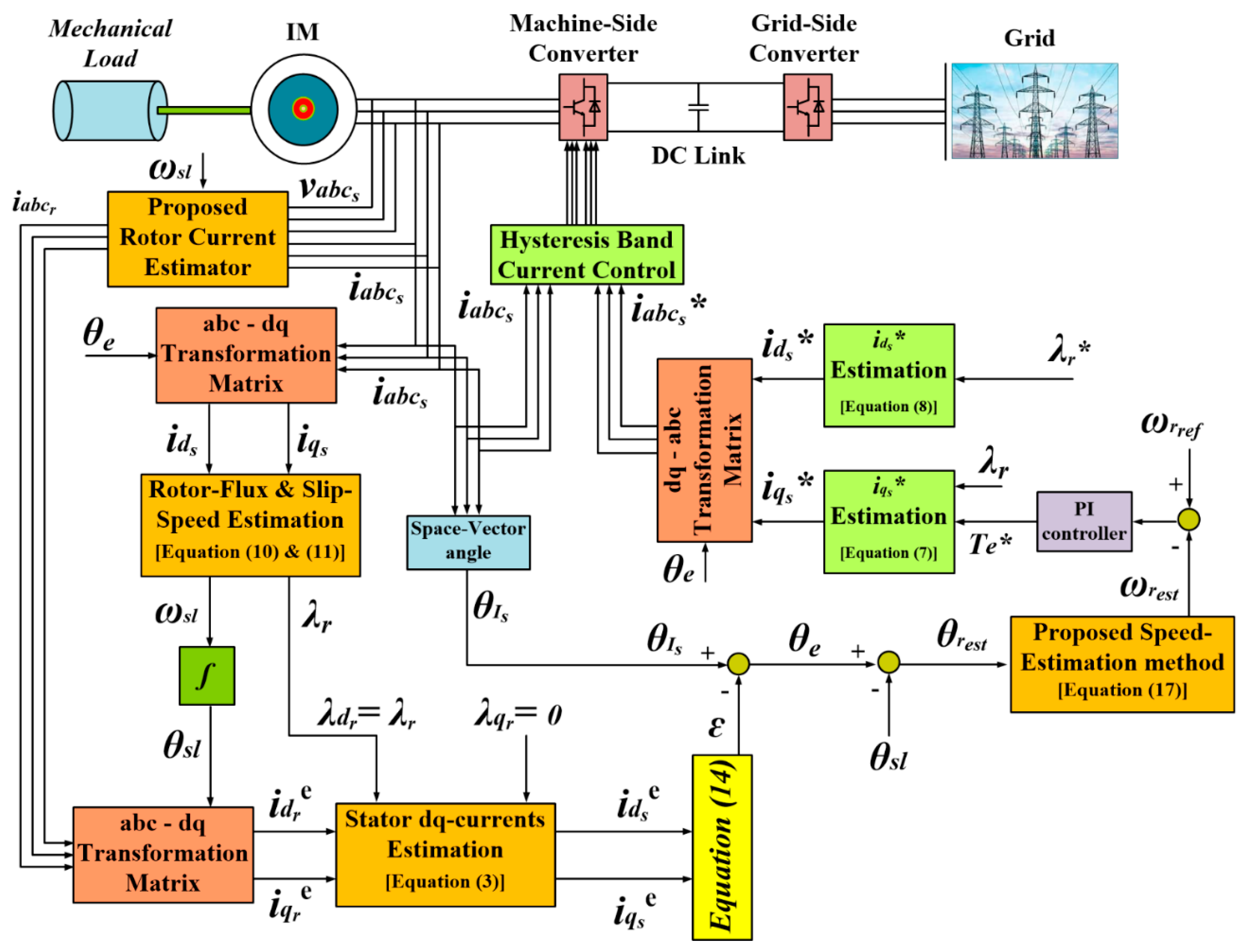
4. Proposed Sensorless Control Scheme based a New Rotor-Speed Observer with the Principle of Indirect Field-Orientation Technique
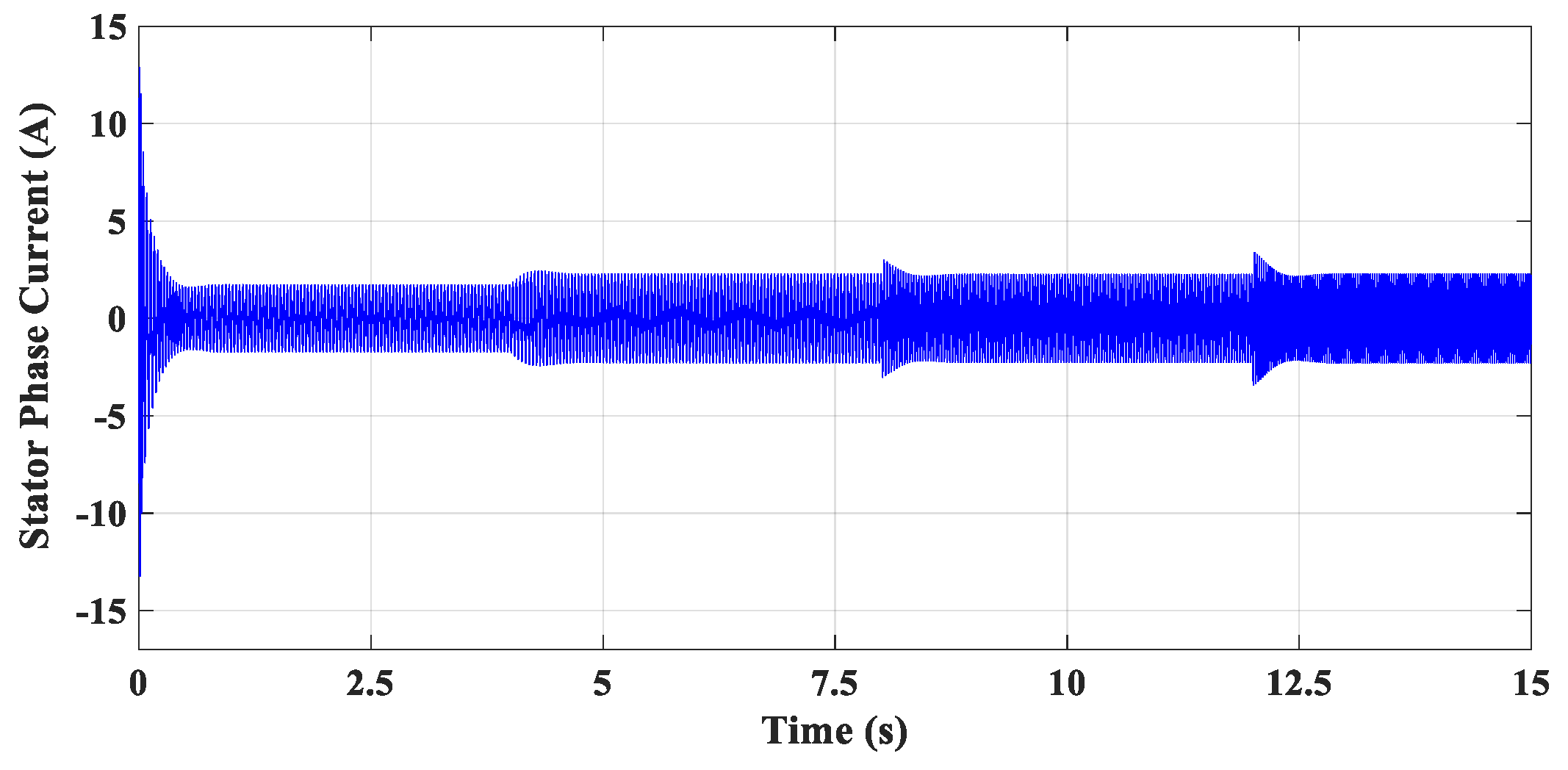
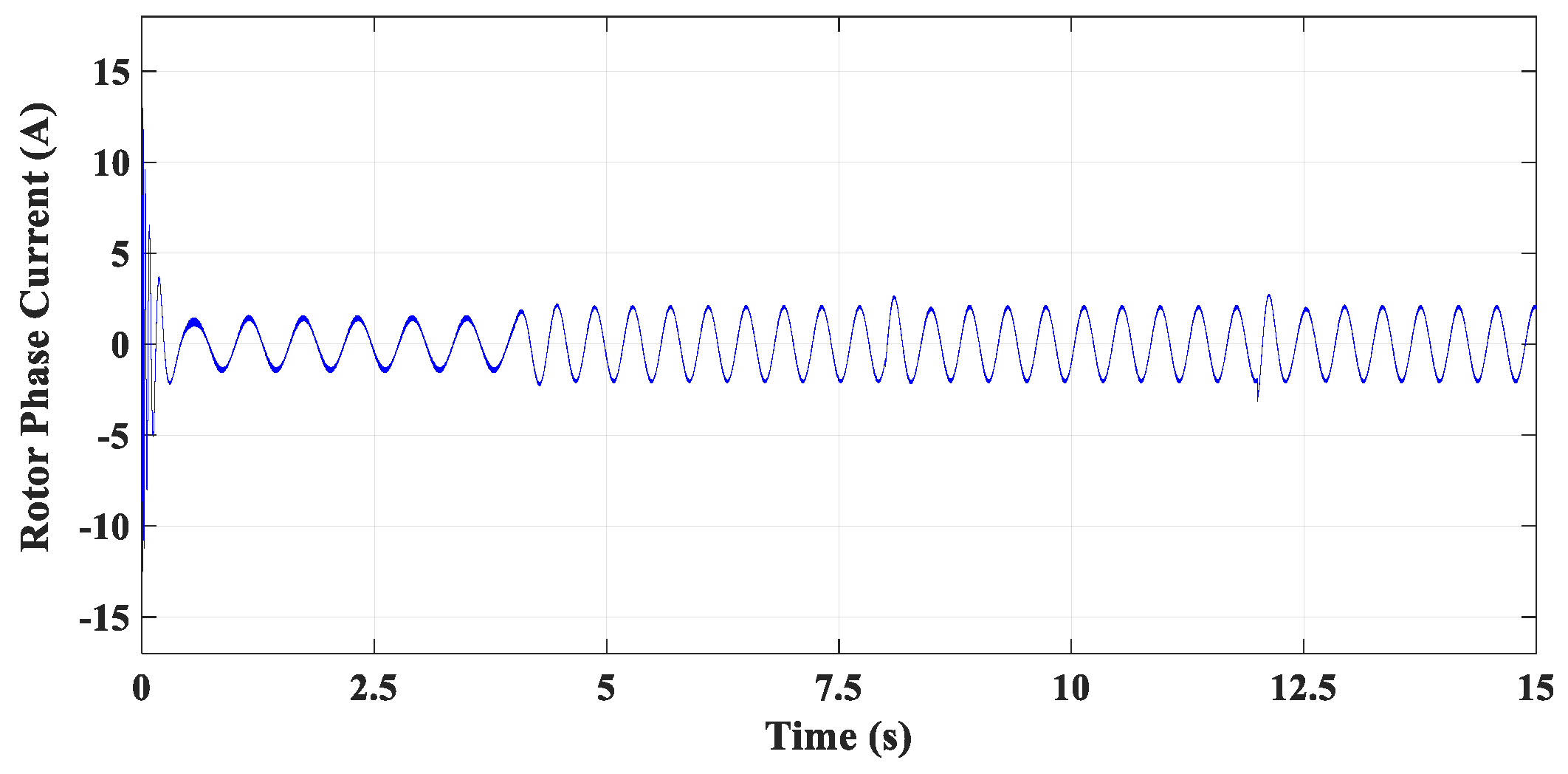
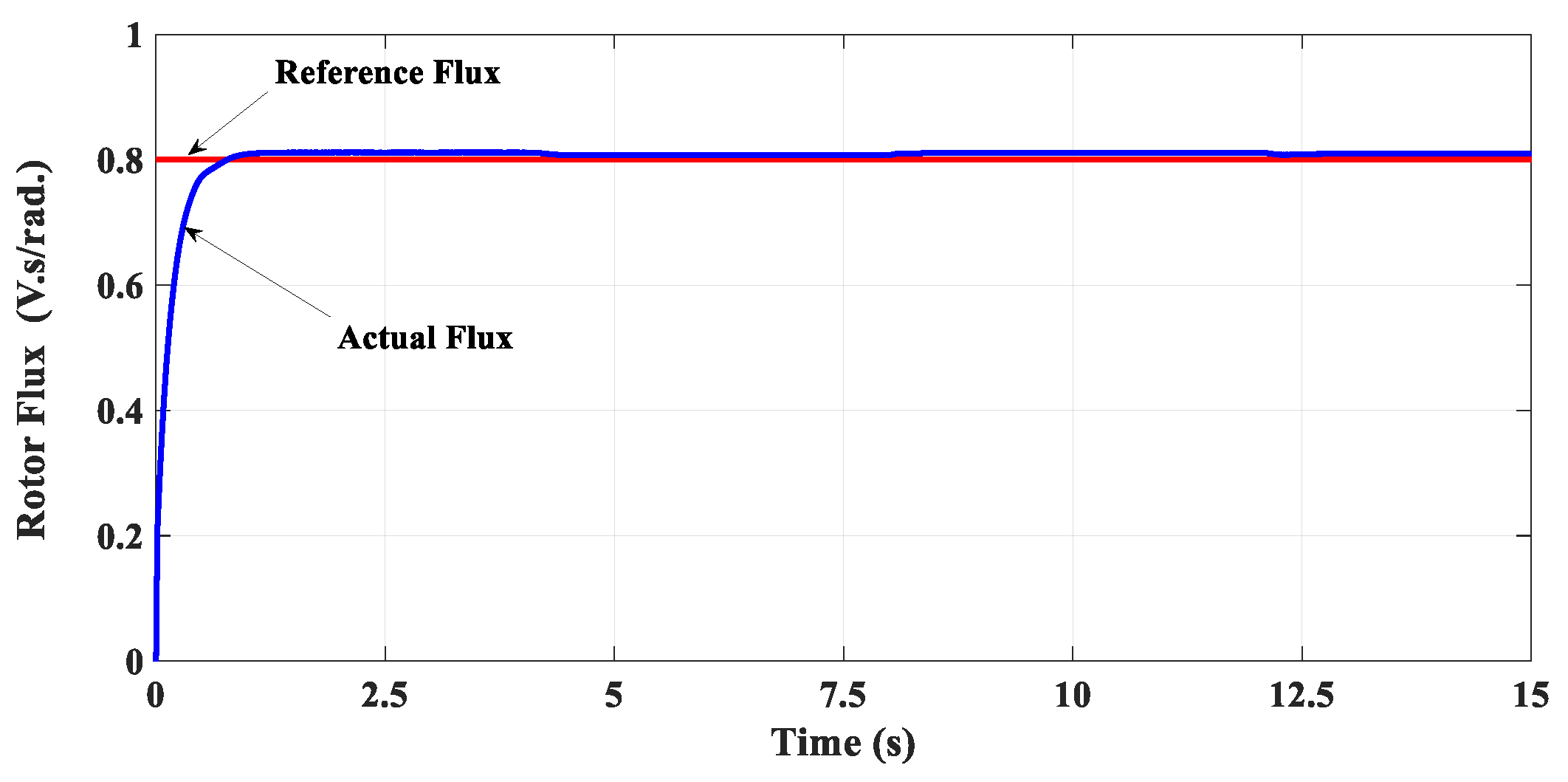
5. Simulation Results
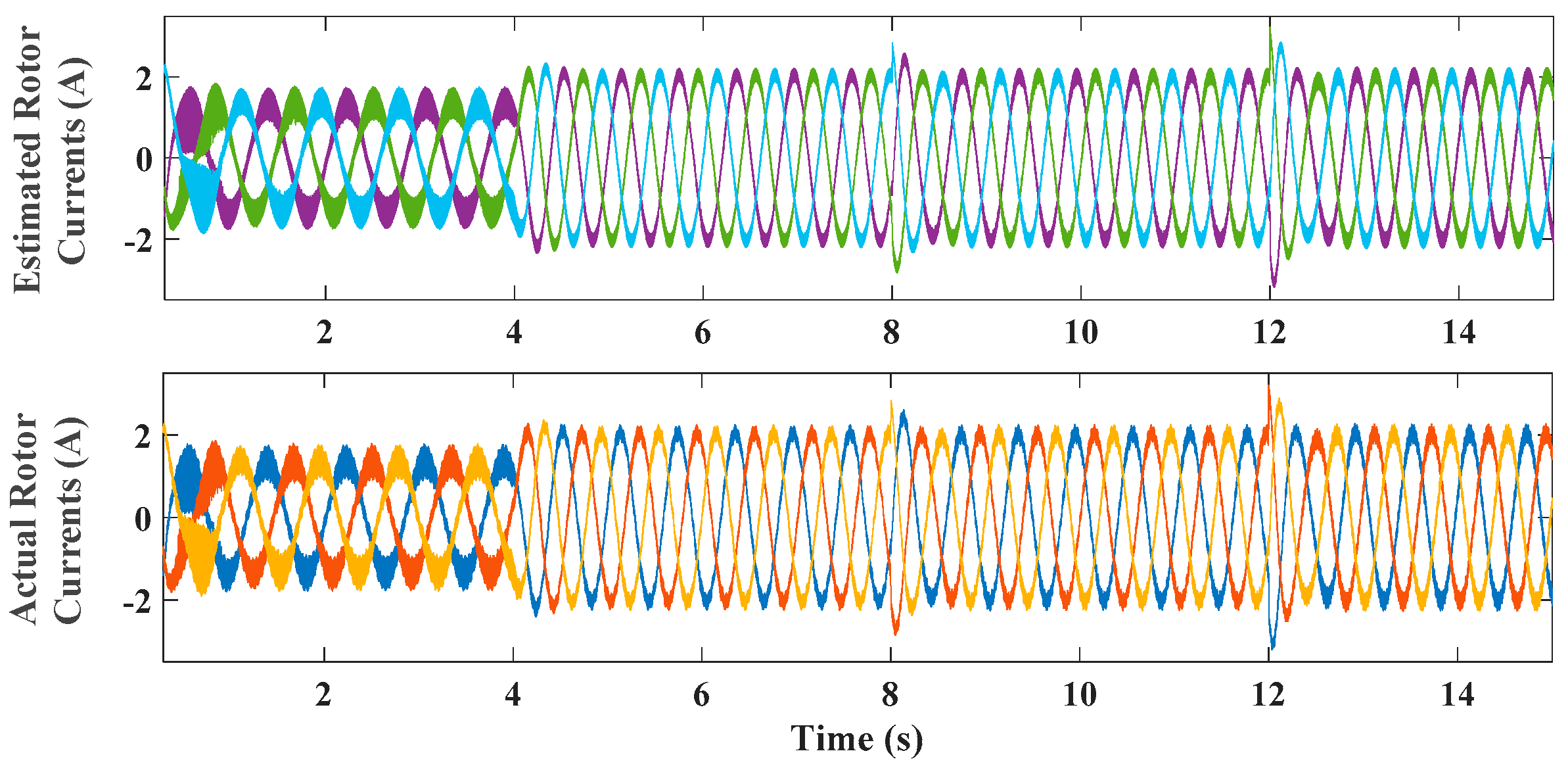
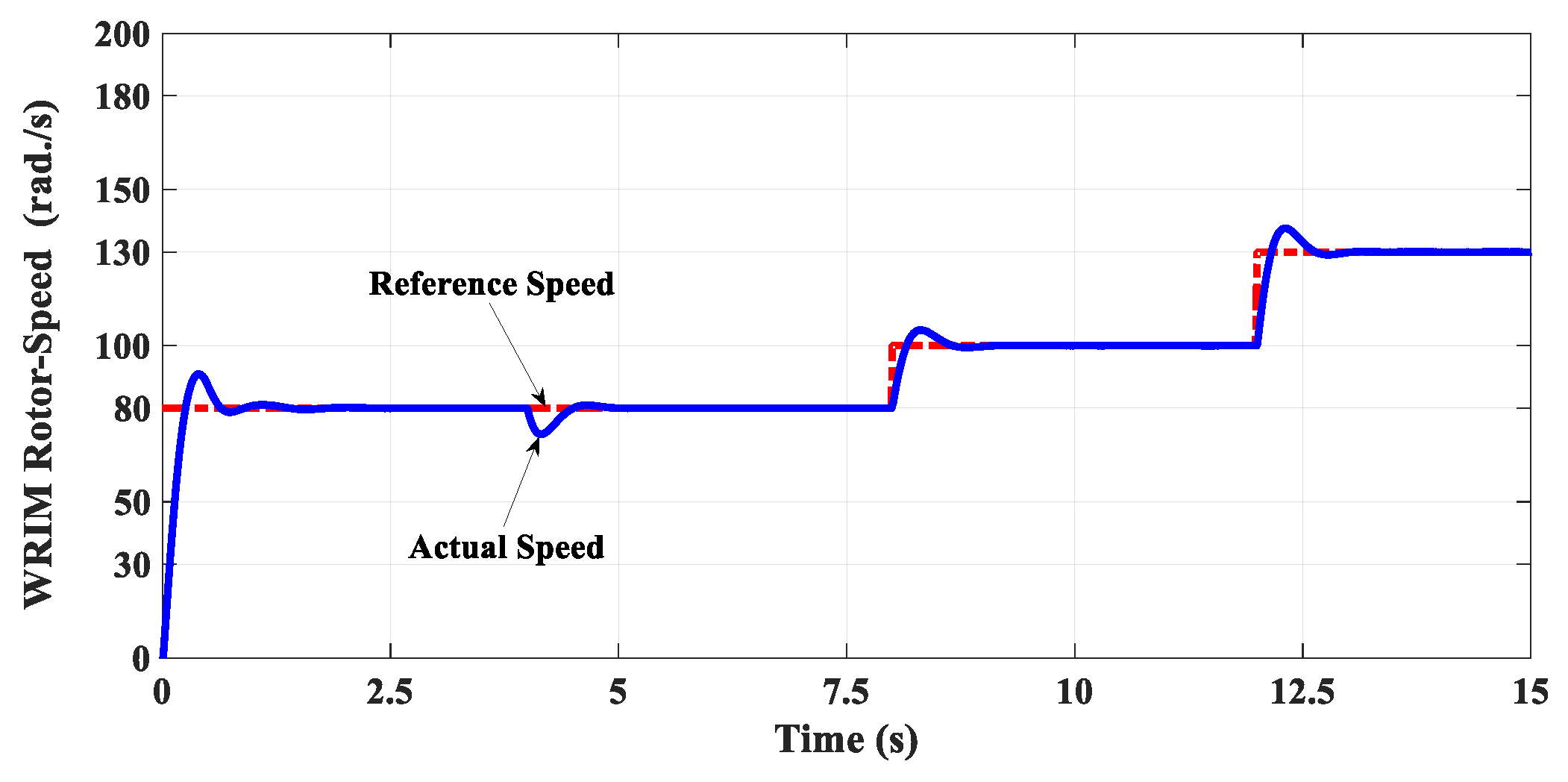
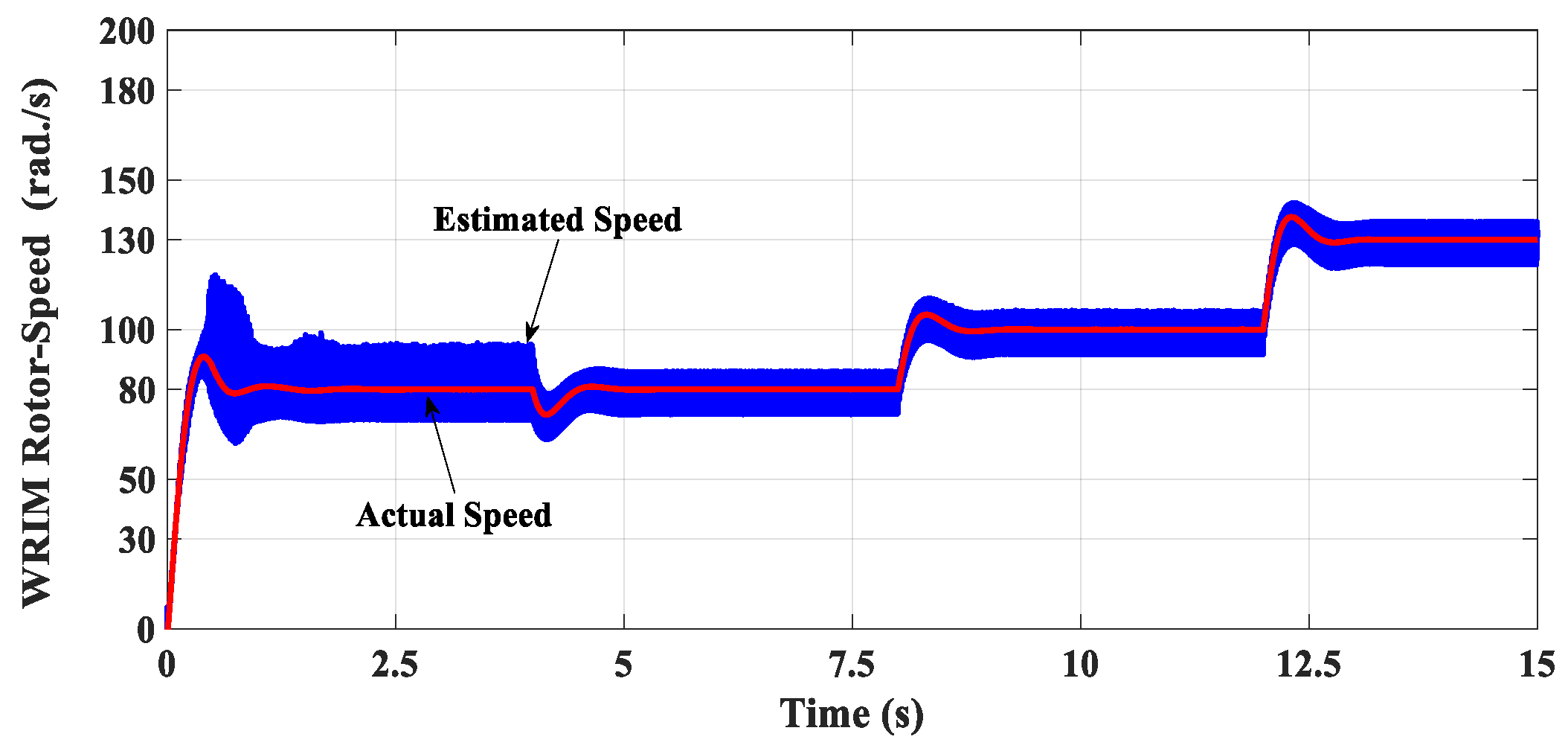
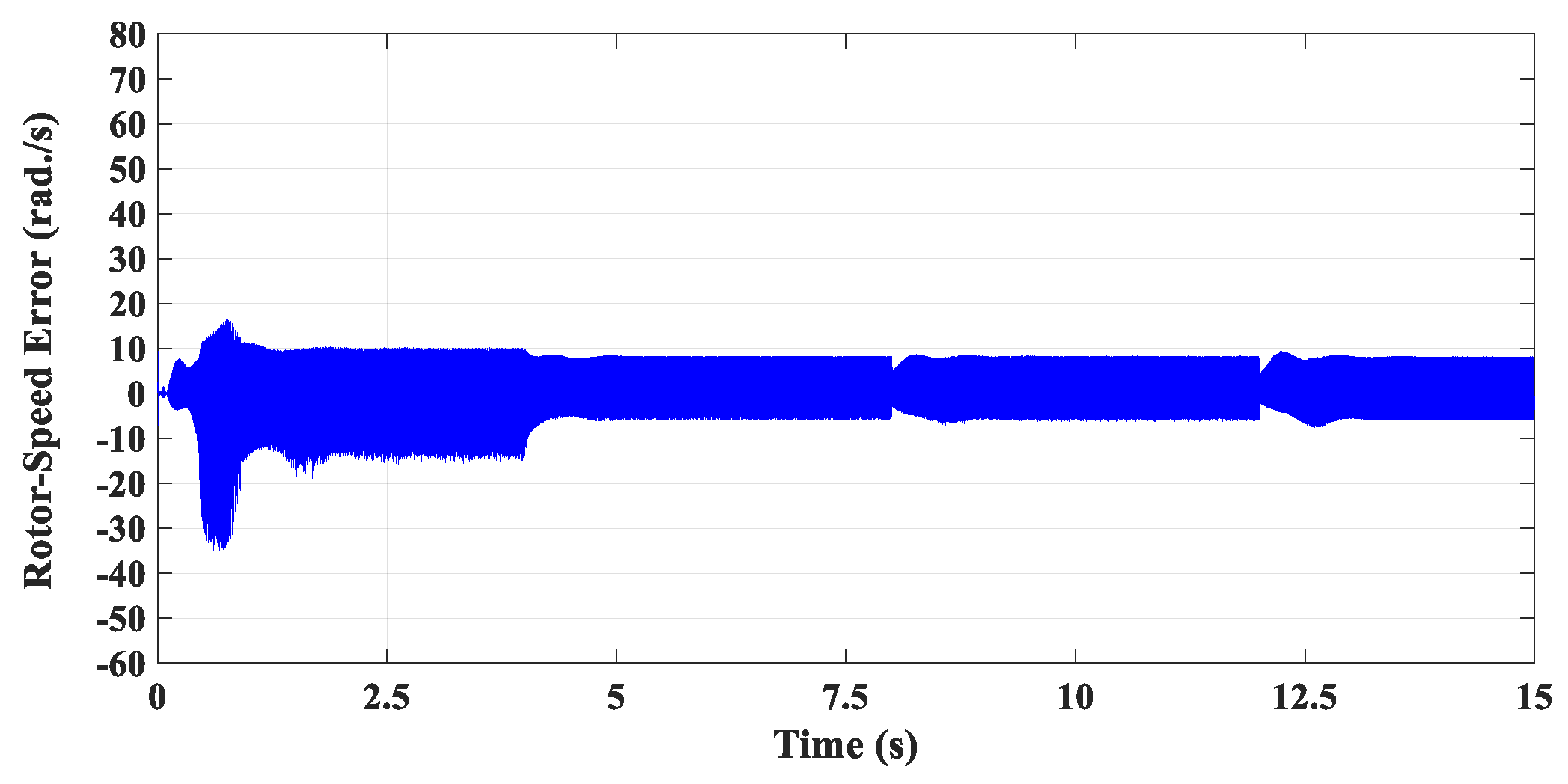
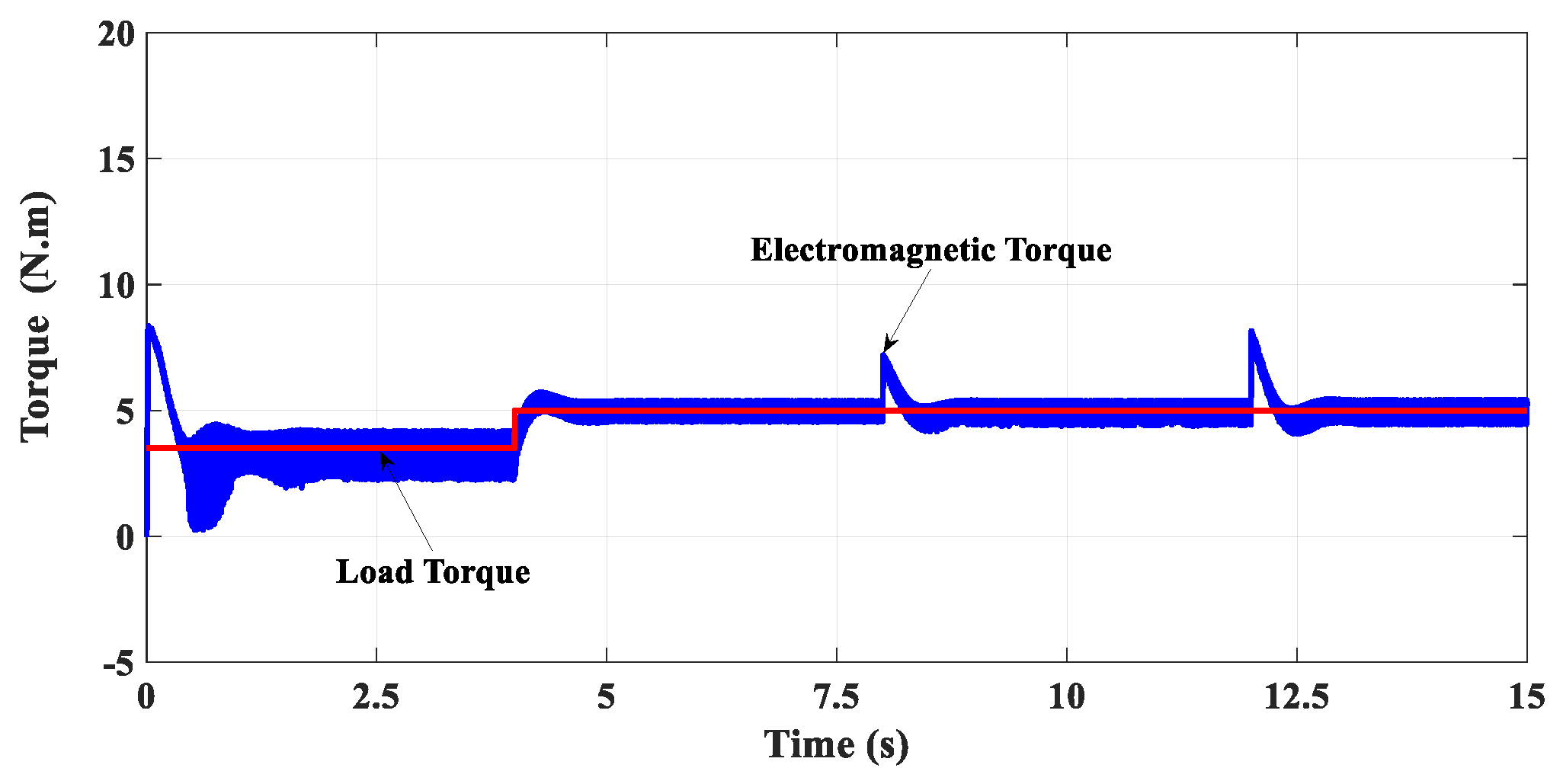
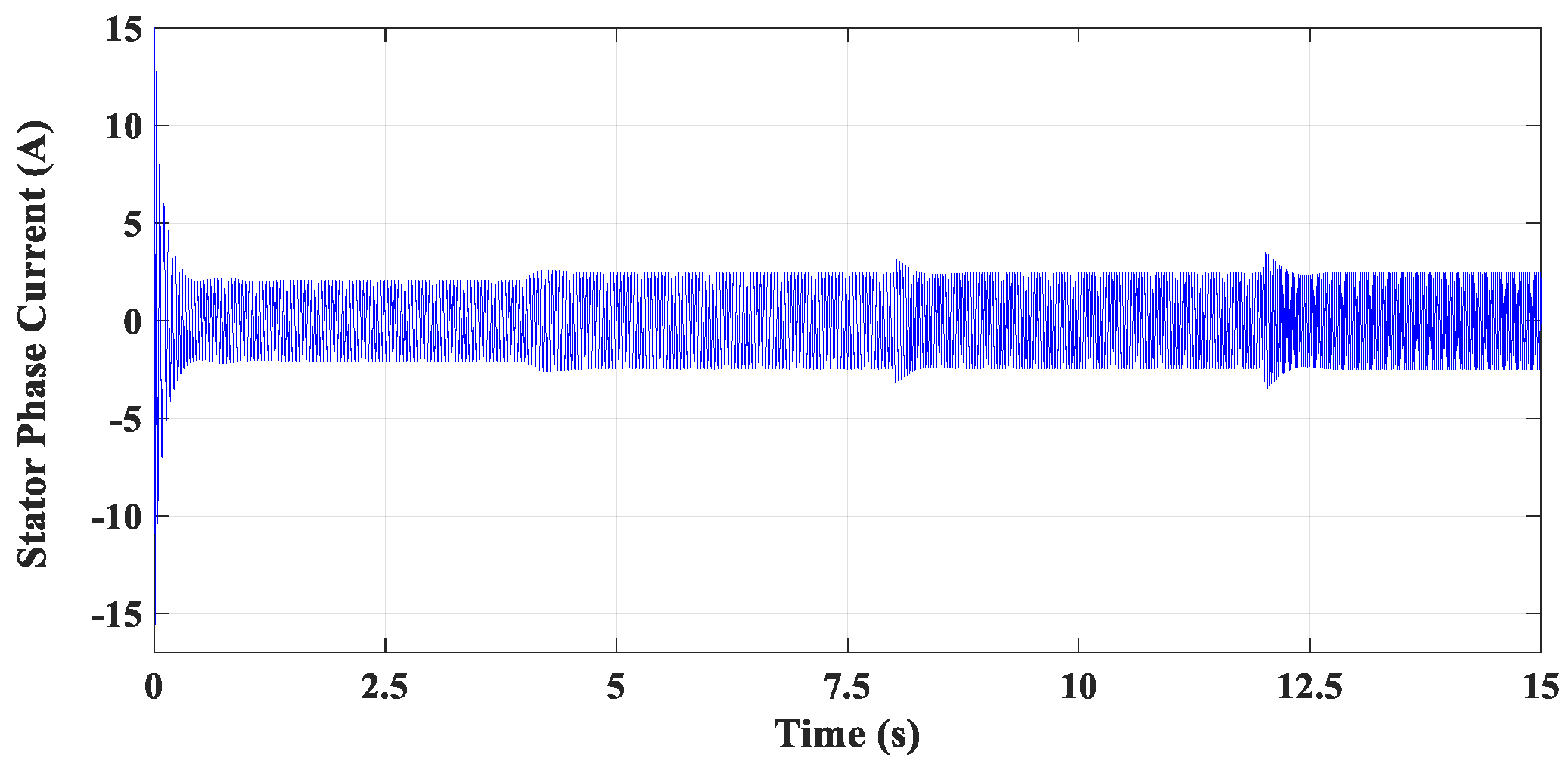
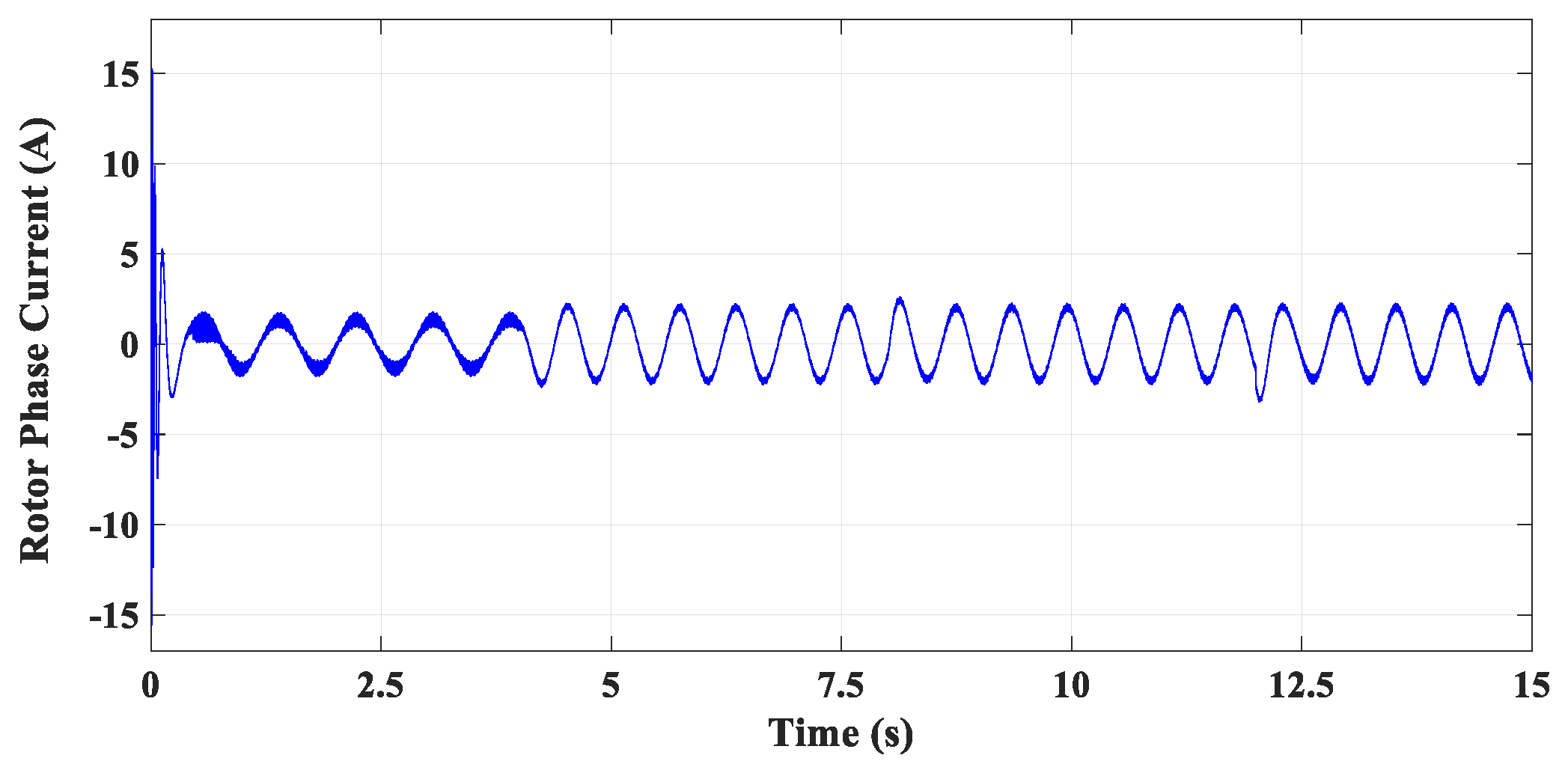
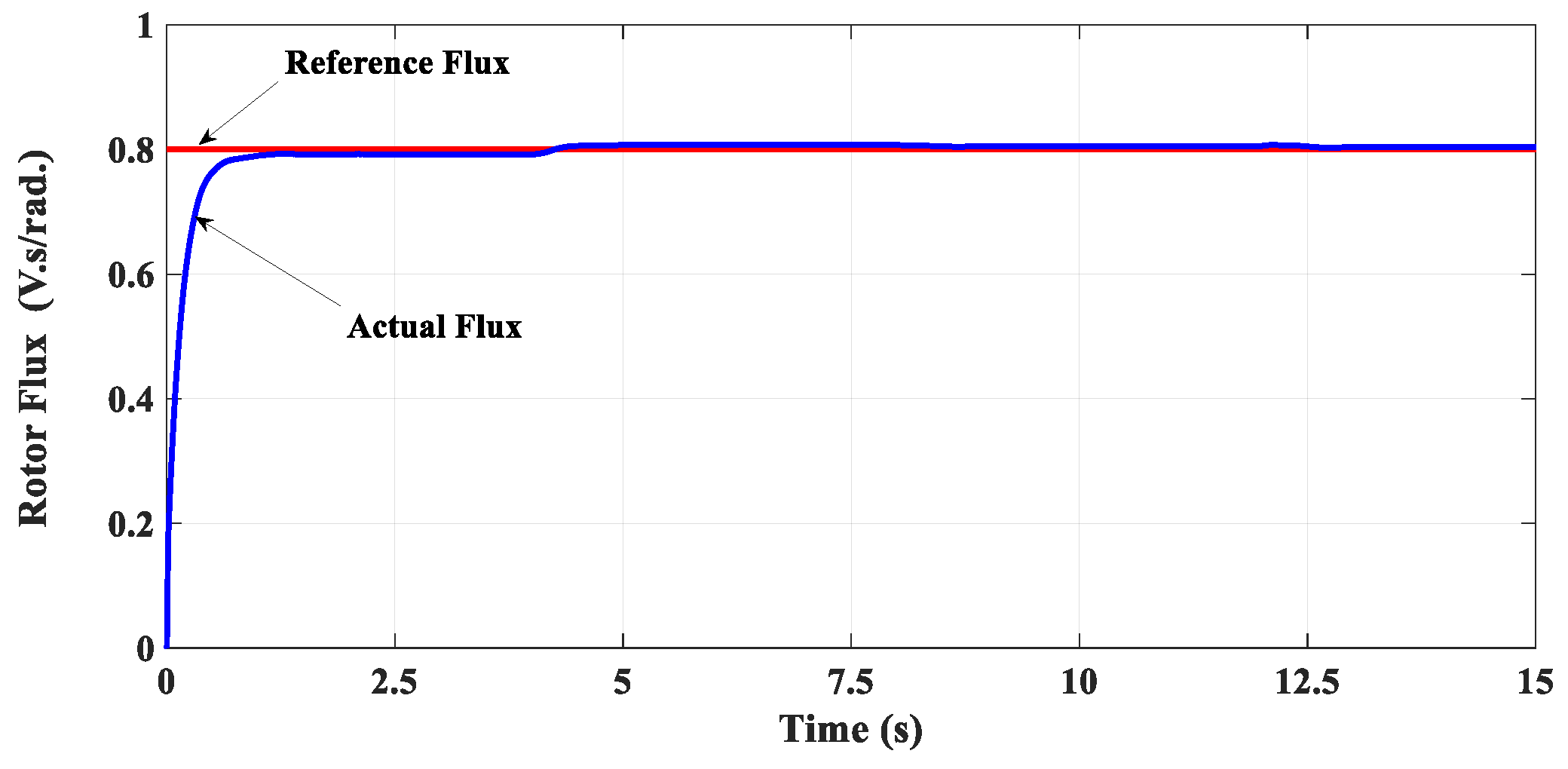
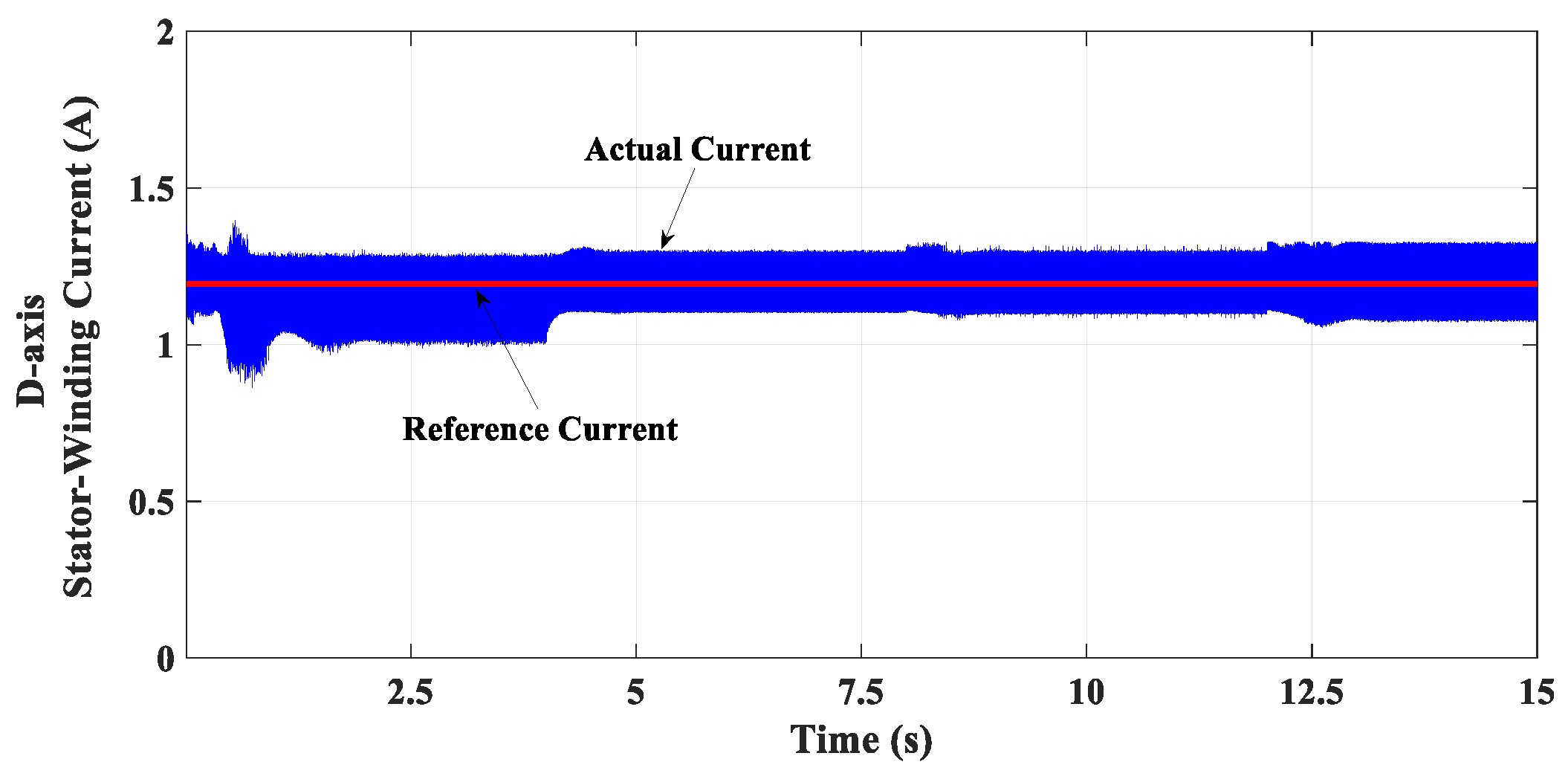
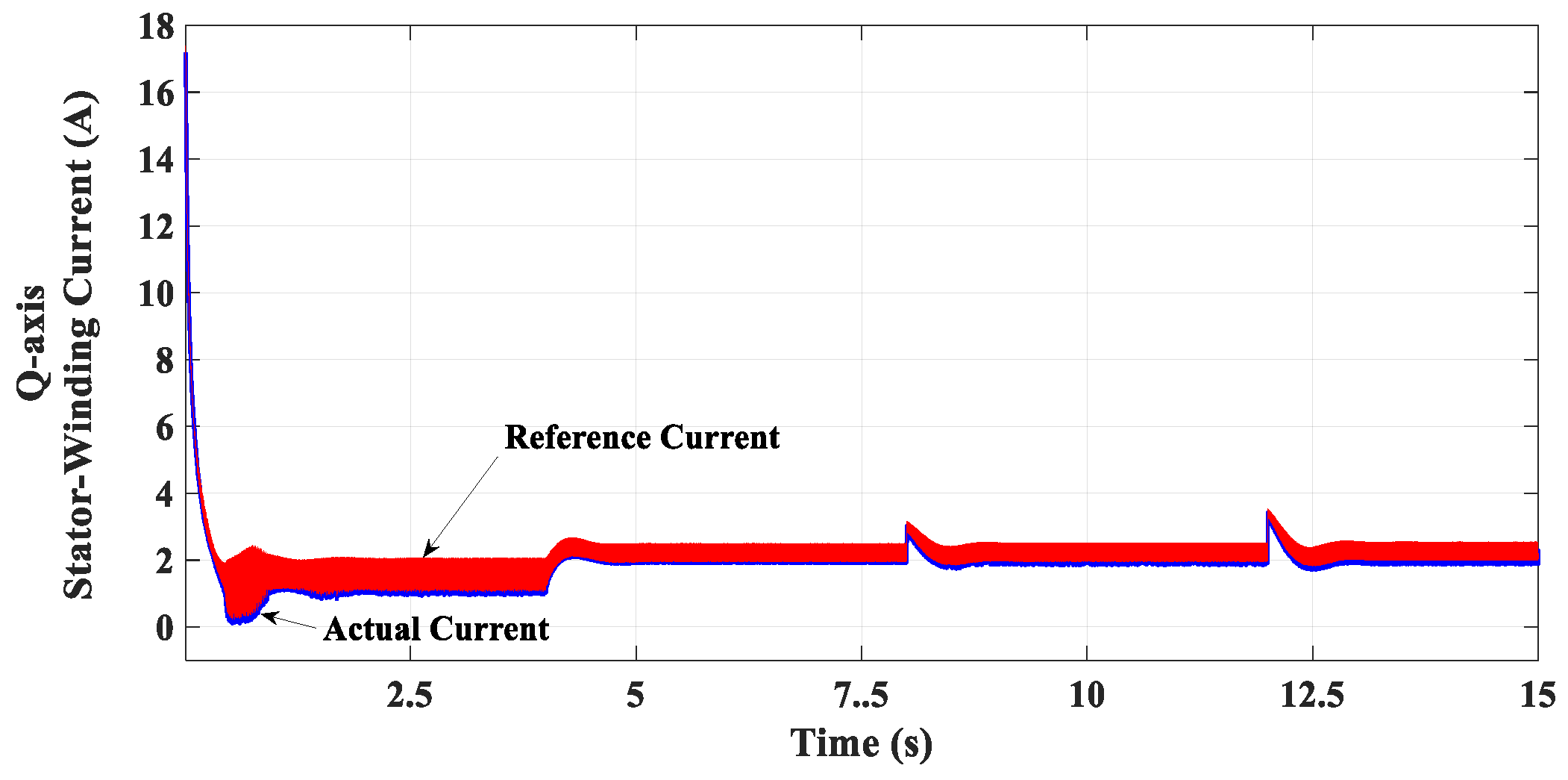
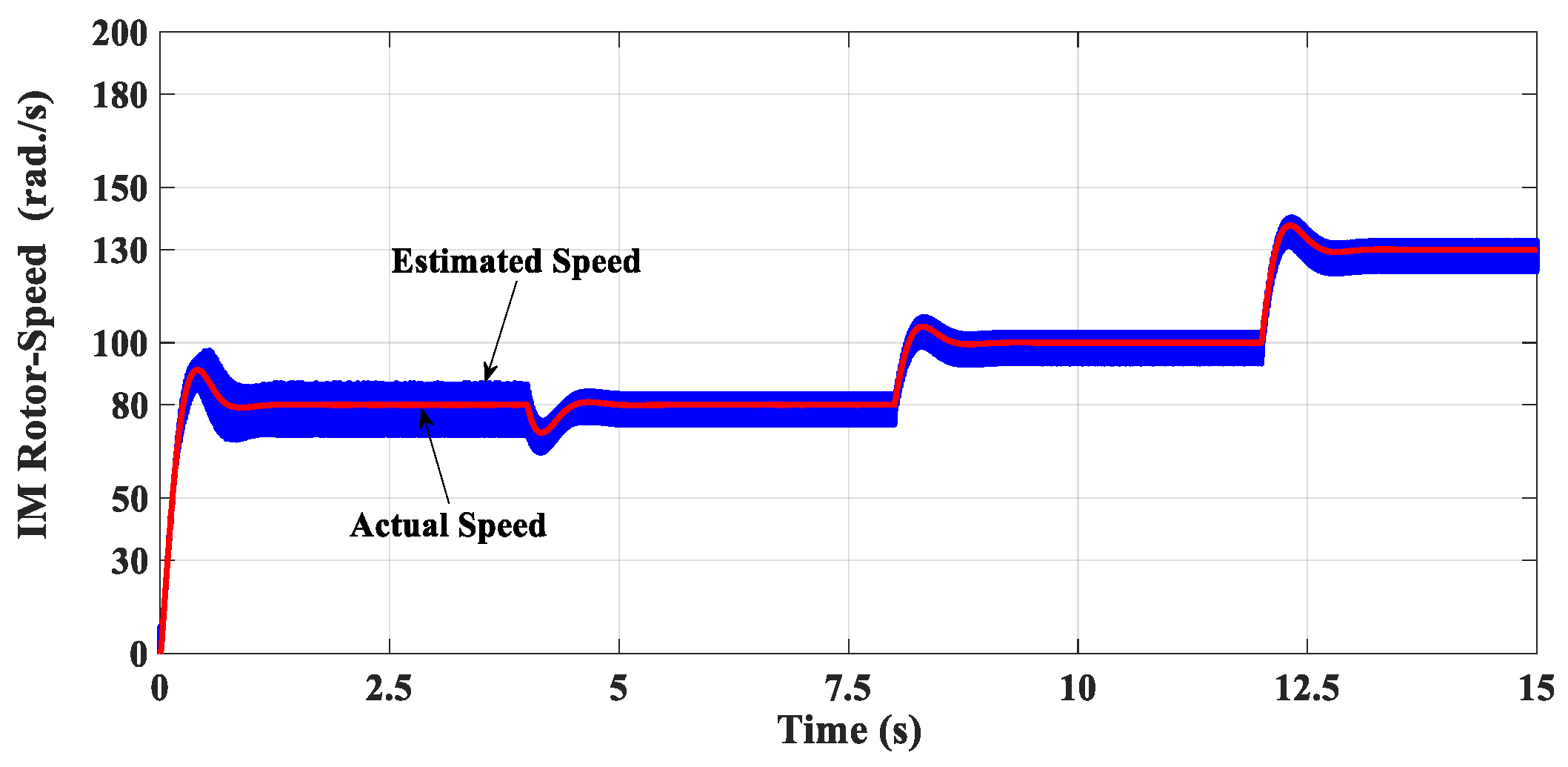
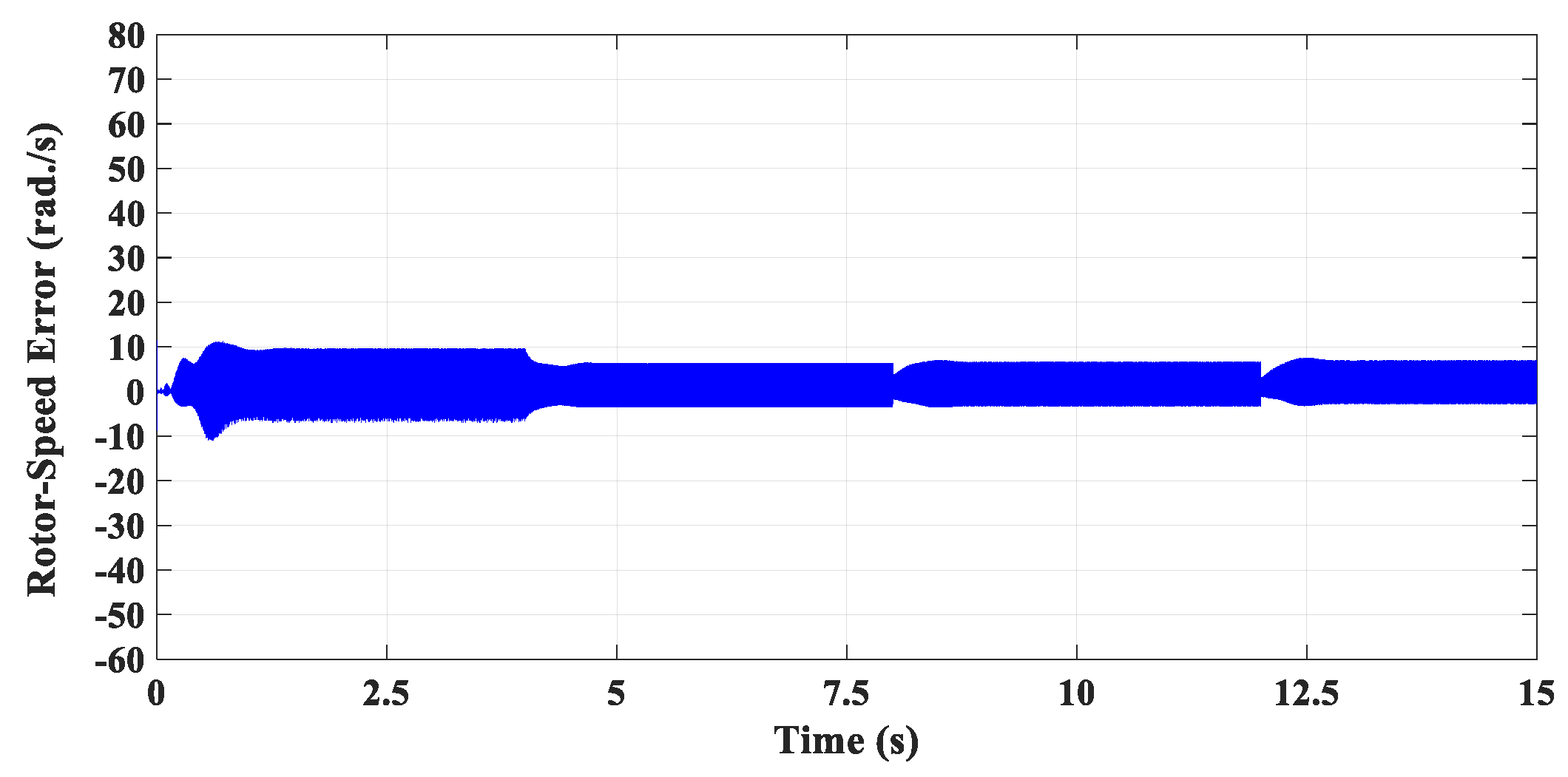
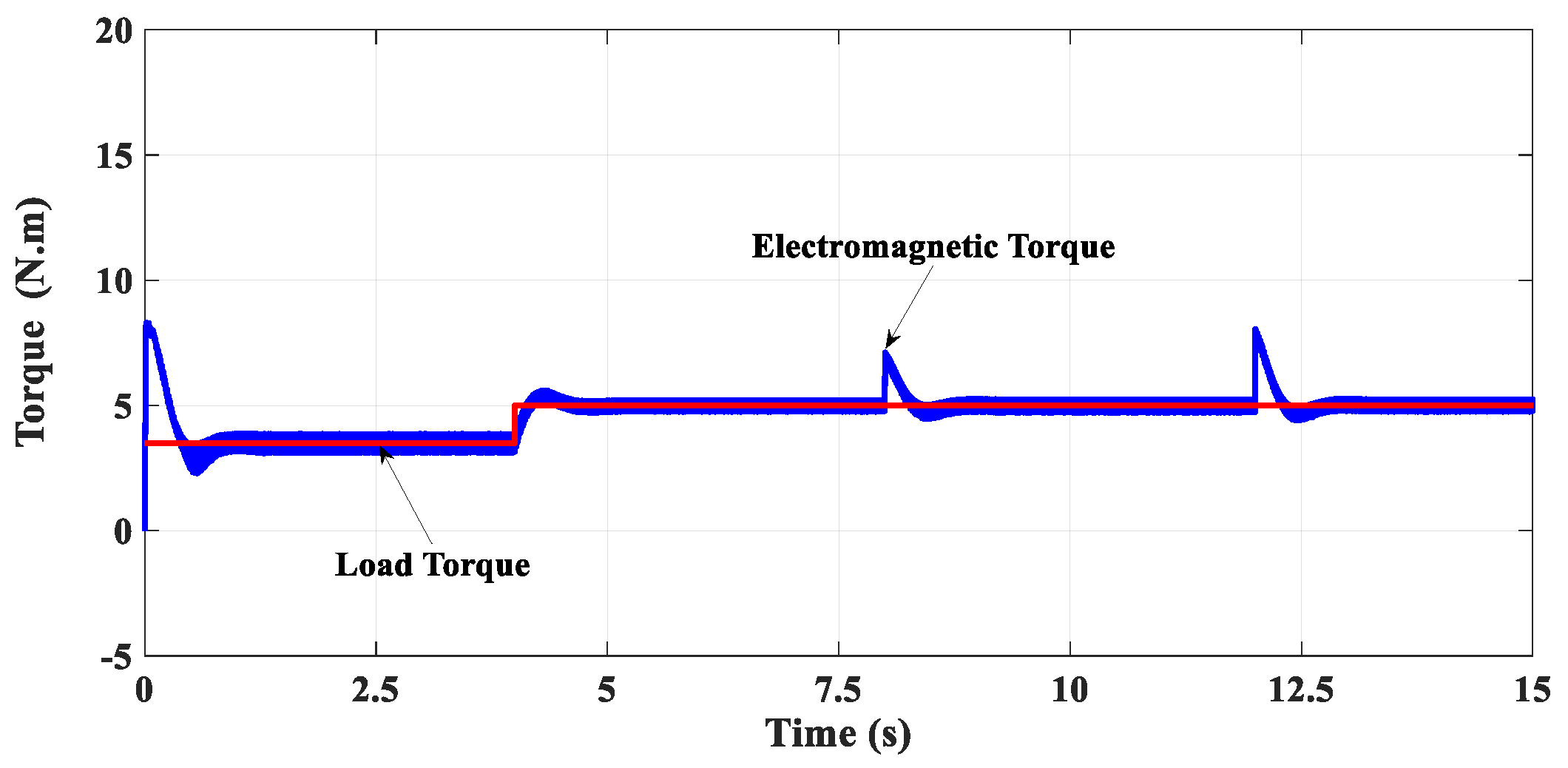
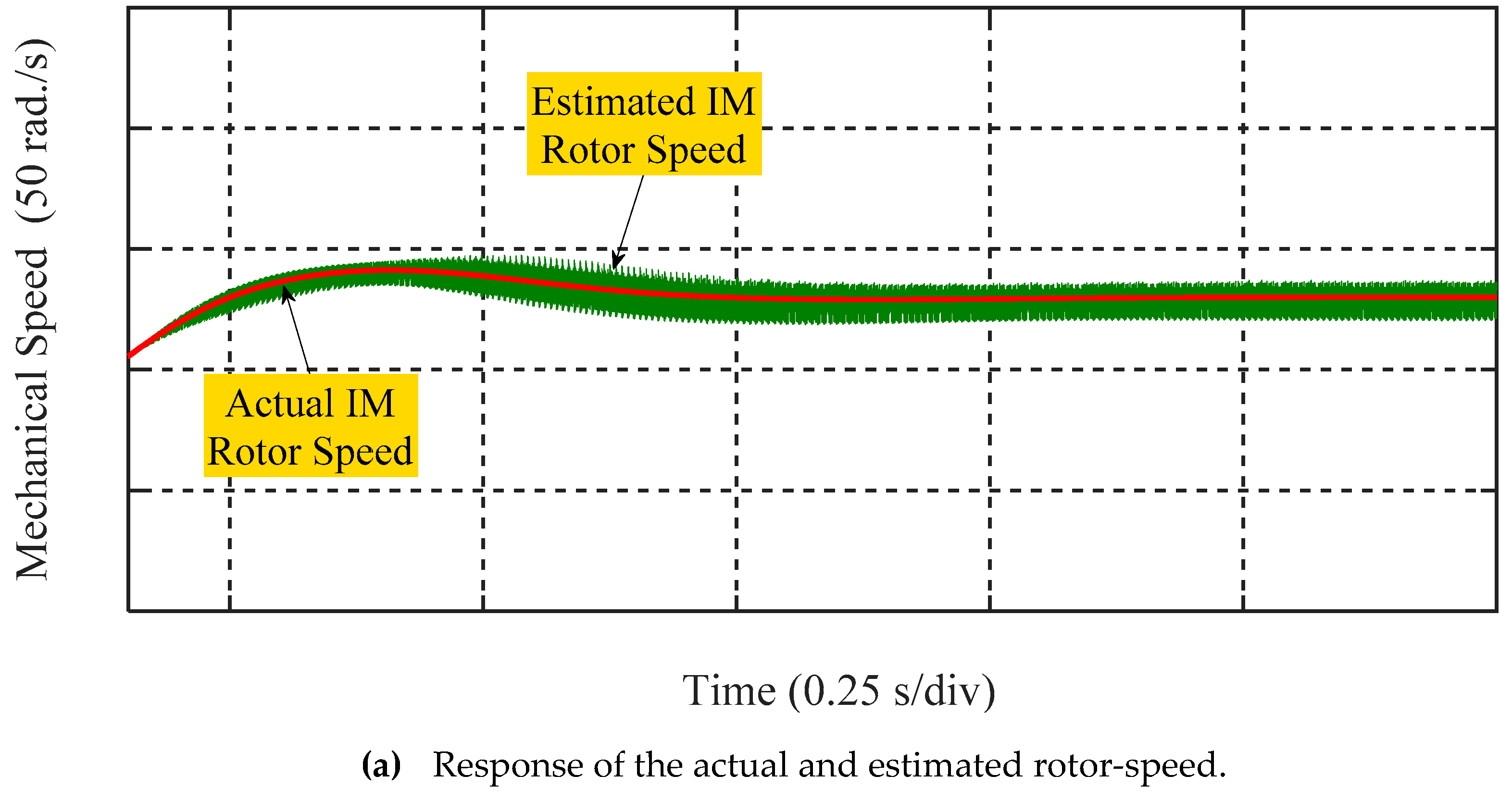
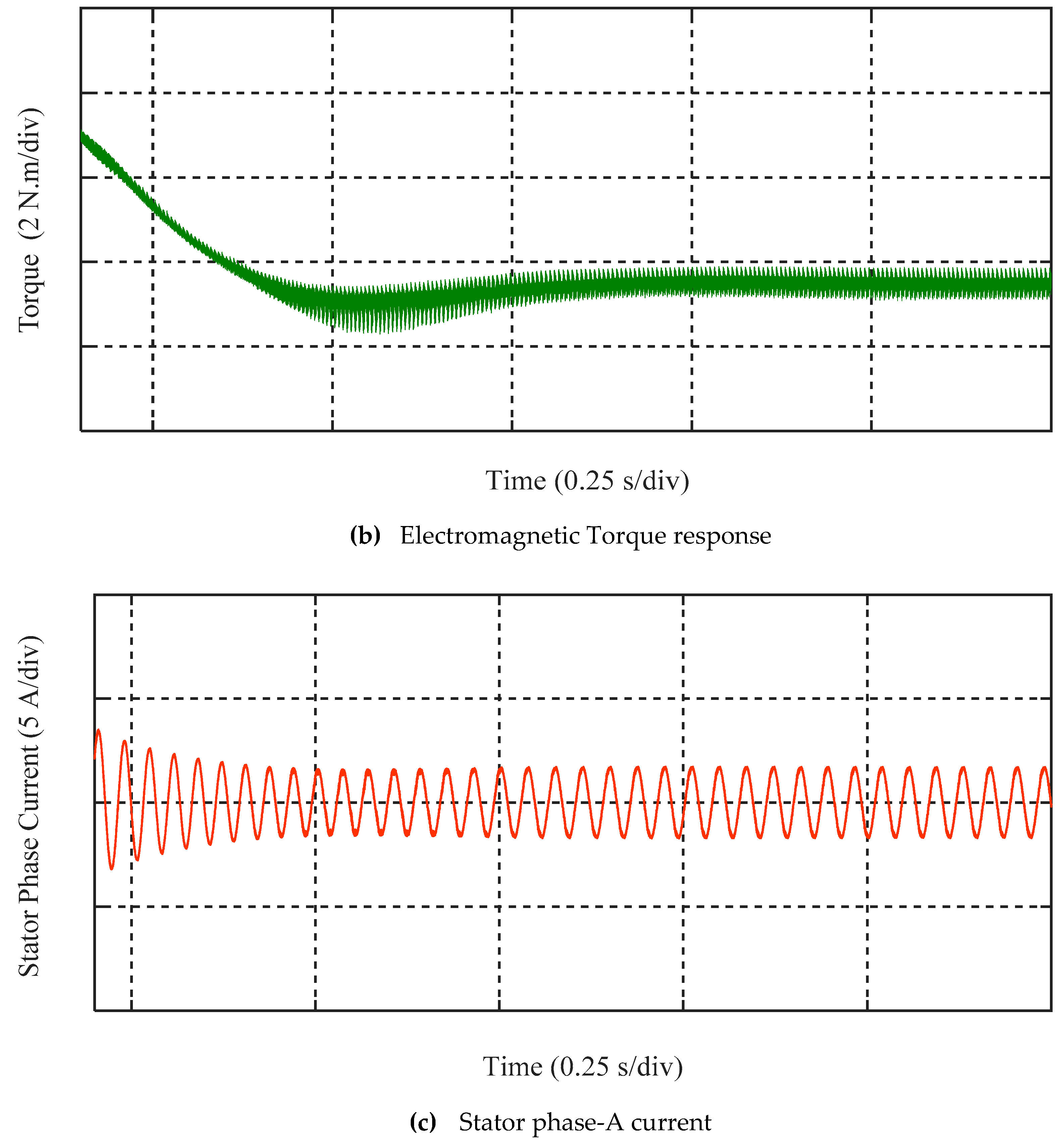
5.1. Effectiveness of the Proposed Rotor Speed Observer
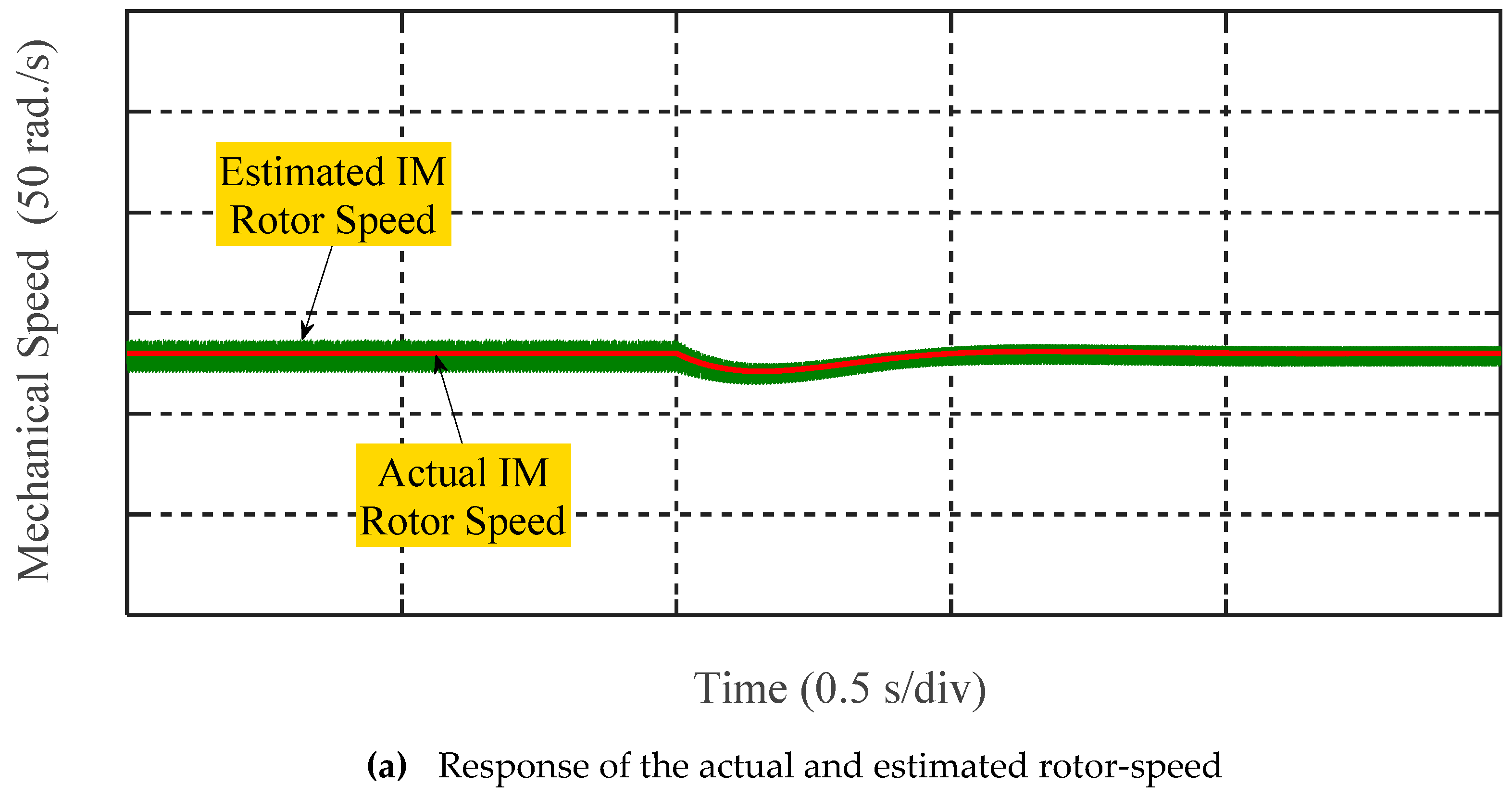
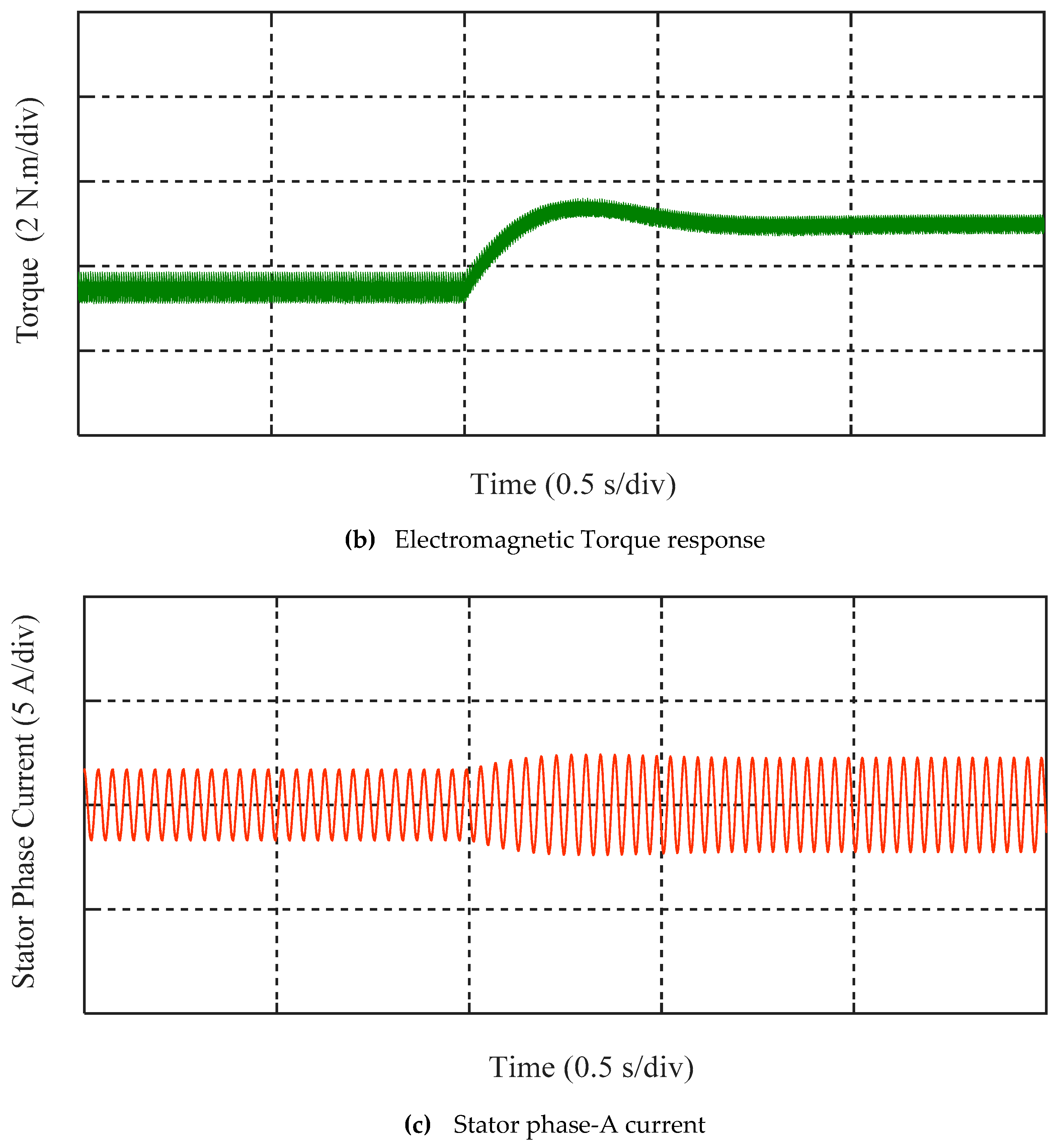
5.2. Robustness Confirmation Against Parameters Uncertainty
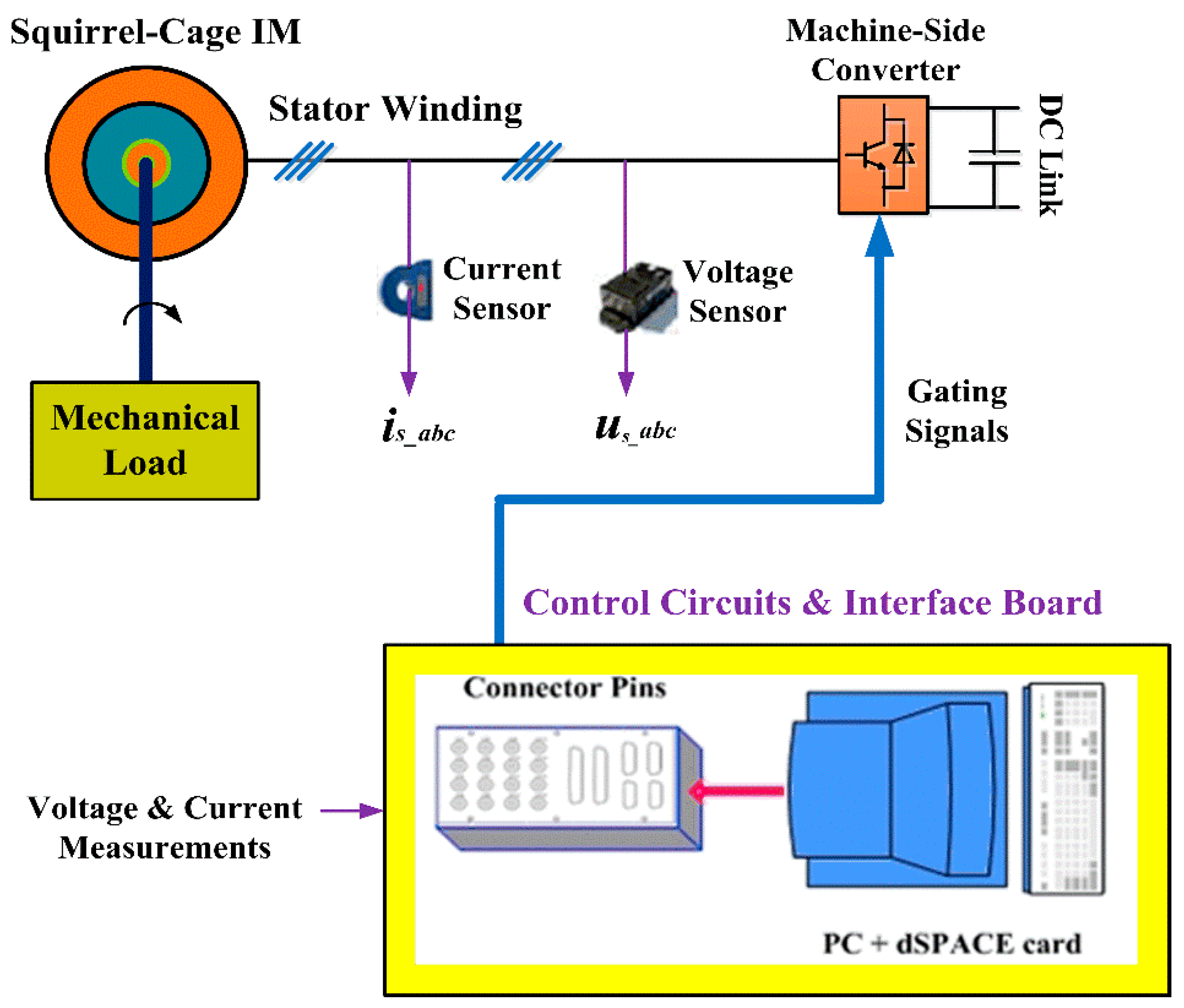
6. Experimental Work
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated Line Voltage | 400 V |
| Rated Frequency | 50 Hz |
| 5.71 Ω | |
| 4.08 Ω | |
| 14.3 mH | |
| 14.3 mH | |
| 670.5 mH | |
| Rotor Inertia, J | 0.011 kg.m2 |
References
- Wu, B.; Lang, Y.; Zargari, N.; Kouro, S. Power Conversion and Control of Wind Energy Systems; Wiley-IEEE Press: New York, NY, USA, 2011. [Google Scholar]
- Bose, B.K. Modern Power Electronics and AC Drives; Prentice Hall PTR: Saddle River, NJ, USA, 2002. [Google Scholar]
- Zeb, K.; Haider, A.; Uddin, W.; Qureshi, M.B.; Mehmood, C.A.; Jazlan, A.; Sreeram, V. Indirect Vector Control of Induction Motor using Adaptive Sliding Mode Controller. In Proceedings of the Australian Control Conference (AuCC), Newcastle, Australia, 3–4 November 2016; pp. 358–363. [Google Scholar]
- Gobinath, D.; Vairaperumal, K.; Elamcheren, S. Simplified approach on feed forward vector control of induction motor with PI controller using SPWM technique. In Proceedings of the IEEE International Conference on Computational Intelligence and Computing Research, Coimbatore, India, 18–20 December 2014; pp. 1–4. [Google Scholar]
- Saha, S.; Nayak, B. Sensorless vector control and selection of observer gain for speed control of indirect vector control induction motor drives. In Proceedings of the 2017 Second International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, Tamil Nadu, India, 22–24 February 2017; pp. 1–7. [Google Scholar]
- Griva, G.; Ilas, C.; Eastham, J.F.; Profumo, F.; Vranka, P. High performance sensorless control of induction motor drives for industry applications. In Proceedings of the Power Conversion Conference, Nagaoka, Japan, 6 August 1997; pp. 535–539. [Google Scholar]
- Rokhforoz, P.; Poshtan, J. Rotor speed and resistance estimation using robust extended Kalman filter for sensorless vector control of induction motor drives. In Proceedings of the 6th Power Electronics, Drive Systems & Technologies Conference (PEDSTC 2015), Tehran, Iran, 3–4 February 2015; pp. 304–309. [Google Scholar]
- Ha, J.; Sul, S. Sensorless field-orientation control of an induction machine by high-frequency signal injection. IEEE Trans. Ind. Appl. 1999, 35, 45–51. [Google Scholar]
- Fot, S.; Testa, A.; De Caro, S.; Scimone, T.; Scelba, G.; Scarcella, G. Rotor Time Constant Identification on Sensorless Induction Motor Drives by low Frequency Signal Injection. In Proceedings of the 2018 IEEE 9th International Symposium on Sensorless Control for Electrical Drives (SLED), Helsinki, Finland, 13–14 September 2018; pp. 150–155. [Google Scholar]
- Teja, A.; Chakraborty, C.; Maiti, S.; Hori, Y. A new model reference adaptive controller for four quadrant vector controlled induction motor drives. IEEE Trans. Ind. Electron. 2012, 59, 3757–3767. [Google Scholar] [CrossRef]
- Rind, S.; Ren, Y.; Shi, K.; Jiang, L.; Tufail, M. Rotor flux-MRAS based speed sensorless non-linear adaptive control of induction motor drive for electric vehicles. In Proceedings of the 50th International Universities Power Engineering Conference (UPEC), Stoke on Trent, UK, 1–4 September 2015. [Google Scholar]
- Rashed, M.; Stronach, A. A stable back-EMF MRAS-based sensorless low-speed induction motor drive insensitive to stator resistance variation. IEE Proc. Electr. Power Appl. 2004, 151, 685–693. [Google Scholar] [CrossRef]
- Ta, C.; Uchida, T.; Hori, Y. MRAS-based speed sensorless control for induction motor drives using instantaneous reactive power. In Proceedings of the 27th Annual Conference of IECON, Denver, CO, USA, 29 November–2 December 2001. [Google Scholar]
- Teja, A.; Verma, V.; Chakraborty, C. A new formulation of reactive-power-based model reference adaptive system for Sensorless induction motor drive. IEEE Trans. Ind. Electron. 2015, 62, 6797–6808. [Google Scholar] [CrossRef]
- Kojabadi, H. Active power and MRAS based rotor resistance identification of an IM drive. Simul. Model. Pract. Theory 2009, 17, 376–389. [Google Scholar] [CrossRef]
- Fereka, D.; Zerikat, M.; Belaidi, A. MRAS Sensorless Speed Control of an Induction Motor Drive based on Fuzzy Sliding Mode Control. In Proceedings of the 2018 7th International Conference on Systems and Control (ICSC), Valencia, Spain, 24–26 October 2018; pp. 230–236. [Google Scholar]
- Nadh, G.; Syamkumar, U.; Jayanand, B. Sliding mode observer for vector control of induction motor. In Proceedings of the International Conference on Next Generation Intelligent Systems (ICNGIS), Kottayam, India, 1–3 September 2016; pp. 1–6. [Google Scholar]
- Kouchih, D.; Hachelaf, R.; Boumalha, N.; Tadjine, M.; Boucherit, M.S. Improvement of sensorless vector controlled induction motor drives using a new algorithm for the rotor resistance adaptation. In Proceedings of the the 5th International Conference on Systems and Control (ICSC), Marrakesh, Morocco, 25–27 May 2016; pp. 67–71. [Google Scholar]
- Gadoue, S.M.; Giaouris, D.; Finch, J.W. Sensorless Control of Induction Motor Drives at Very Low and Zero Speeds Using Neural Network Flux Observers. IEEE Trans. Ind. Electron. 2009, 56, 3029–3039. [Google Scholar] [CrossRef]
- Cirrincione, M.; Pucci, M.; Cirrincione, G.; Capolino, G.A. Sensorless Control of Induction Motor Drives by New Linear Neural Techniques. In Proceedings of the 12th International Power Electronics and Motion Control Conference, Portoroz, Slovenia, 30 August–1 September 2006; pp. 1820–1829. [Google Scholar]
- Jnayah, S.; Khedher, A. Sensorless Direct Torque Control of induction motor using sliding mode flux observer. In Proceedings of the 2019 19th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Sousse, Tunisia, 24–26 March 2019; pp. 536–541. [Google Scholar]
- Zhang, Z.; Bazzi, A.M. Robust Sensorless Scalar Control of Induction Motor Drives with Torque Capability Enhancement at Low Speeds. In Proceedings of the 2019 IEEE International Electric Machines & Drives Conference (IEMDC), San Diego, CA, USA, 12–15 May 2019; pp. 1706–1710. [Google Scholar]
- Mousa, M.G.; Allam, S.M.; Rashad, E.M. A sensorless scalar-control strategy for maximum power tracking of a grid-connected wind-driven brushless doubly-fed reluctance generator. In Proceedings of the 4th International Conference on Electric Power and Energy Conversion Systems (EPECS’15), Sharjah, UAE, 24–26 Novmber 2015; pp. 1–6. [Google Scholar]
- Mousa, M.G.; Allam, S.M.; Rashad, E.M. Sensored and sensorless scalar-control strategy of a wind-driven BDFRG for maximum wind-power extraction. J. Control Decis. 2018, 5, 209–227. [Google Scholar] [CrossRef]
- Verma, V.; Maiti, S.; Chakraborty, C. Sensorless control of grid-connected doubly-fed slip-ring induction motor drive. In Proceedings of the 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 1276–1281. [Google Scholar]
- Hussien, M.G.; Xu, W.; Liu, Y. Vector control schemes for direct voltage control of the stand-alone brushless doubly-fed induction generator. In Proceedings of the 2018 21st International Conference on Electrical Machines & Systems (ICEMS), Jeju, South Korea; 2018; pp. 1307–1312. [Google Scholar]
























© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hussien, M.G.; Xu, W.; Liu, Y.; Allam, S.M. Rotor Speed Observer with Extended Current Estimator for Sensorless Control of Induction Motor Drive Systems. Energies 2019, 12, 3613. https://doi.org/10.3390/en12193613
Hussien MG, Xu W, Liu Y, Allam SM. Rotor Speed Observer with Extended Current Estimator for Sensorless Control of Induction Motor Drive Systems. Energies. 2019; 12(19):3613. https://doi.org/10.3390/en12193613
Chicago/Turabian StyleHussien, Mohamed G., Wei Xu, Yi Liu, and Said M. Allam. 2019. "Rotor Speed Observer with Extended Current Estimator for Sensorless Control of Induction Motor Drive Systems" Energies 12, no. 19: 3613. https://doi.org/10.3390/en12193613
APA StyleHussien, M. G., Xu, W., Liu, Y., & Allam, S. M. (2019). Rotor Speed Observer with Extended Current Estimator for Sensorless Control of Induction Motor Drive Systems. Energies, 12(19), 3613. https://doi.org/10.3390/en12193613