A Reverse Model Predictive Control Strategy for a Modular Multilevel Converter


Abstract
:1. Introduction
2. Mathematical Model
3. MPC Strategy
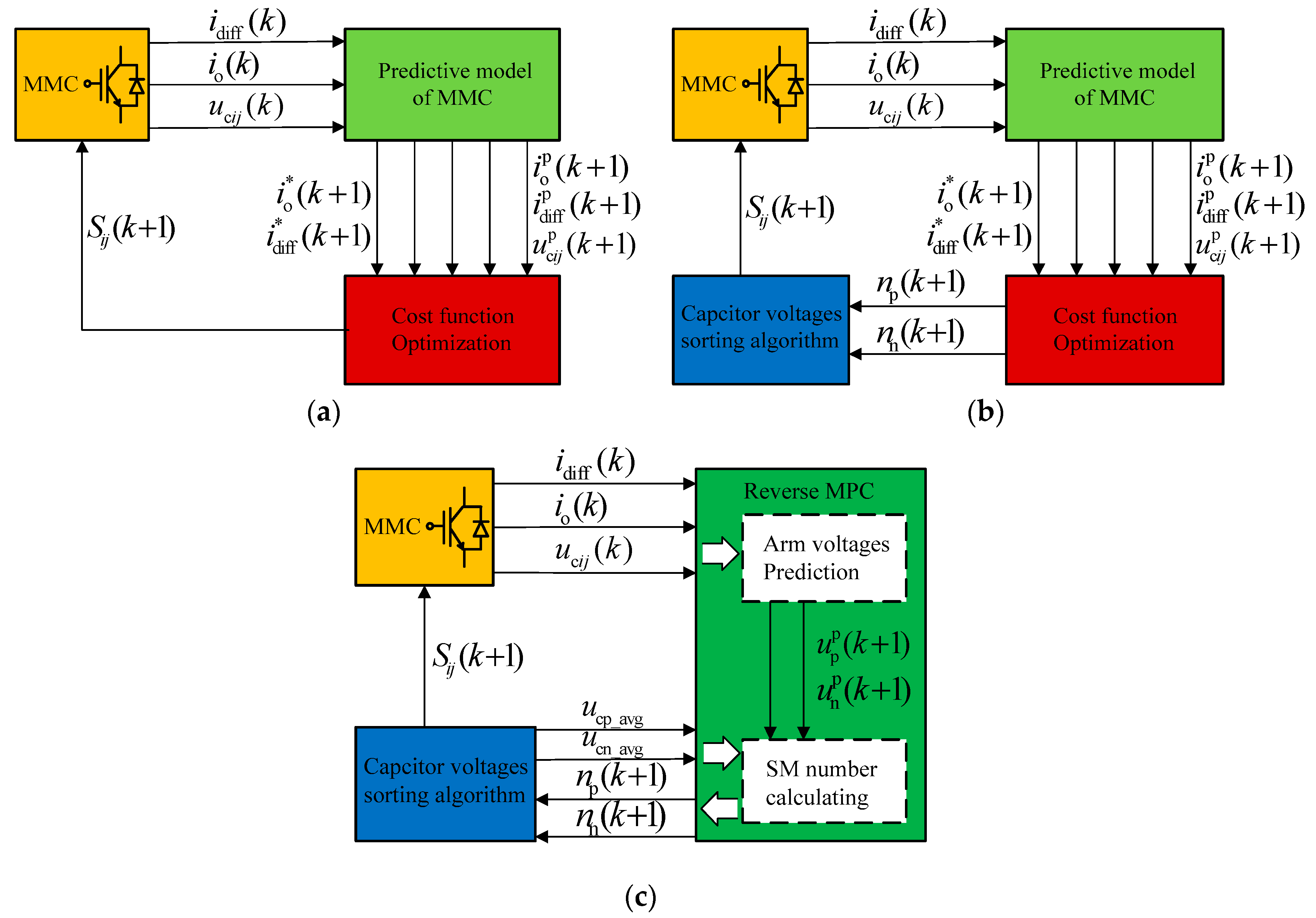
3.1. Conventional MPC
3.2. Modified MPC
3.3. Reverse MPC
4. Simulation Results
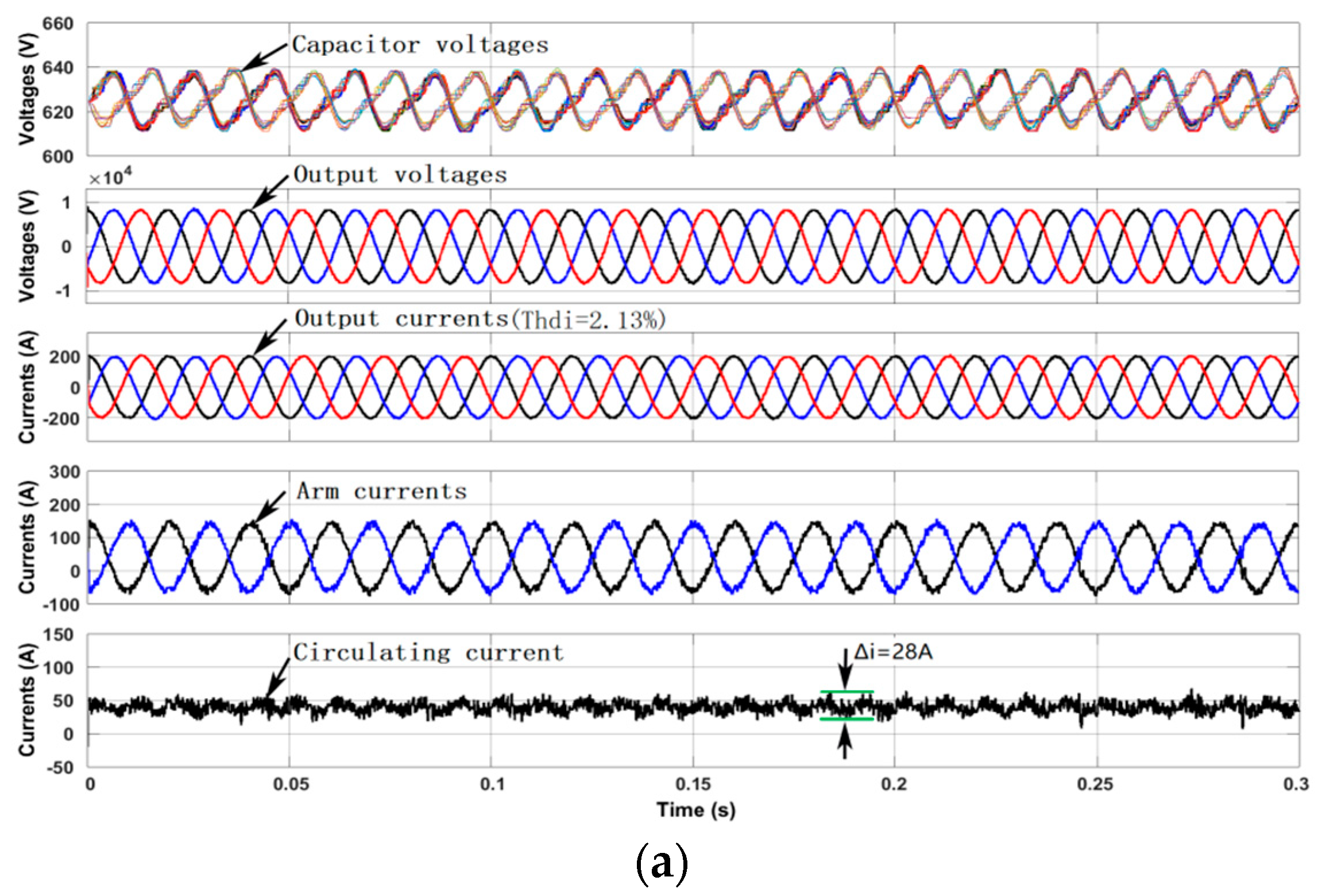
4.1. Steady-State Operation
4.2. Dynamic Operation
5. Experimental Results
5.1. Steady-State Operation
5.2. Dynamic Operation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dekka, A.; Wu, B.; Fuentes, L.R.; Perez, M.; Zargari, R.N. Evolution of Topologies, Modeling, Control Schemes, and Applications of Modular Multilevel Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1631–1656. [Google Scholar] [CrossRef]
- Grandi, G.; Loncarski, J.; Dordevic, O. Analysis and Comparison of Peak-to-Peak Current Ripple in Two-Level and Multilevel PWM Inverters. IEEE Trans. Ind. Electron. 2015, 62, 2721–2730. [Google Scholar] [CrossRef] [Green Version]
- Zhetessov, A.; Ruderman, A. Time-domain optimization of current THD for a single-phase three-level inverter modulation. In Proceedings of the 19th International Conference on Electrical Drives and Power Electronics (EDPE), Dubrovnik, Croatia, 4–6 October 2017; pp. 82–87. [Google Scholar] [CrossRef]
- He, L.; Zhang, K.; Xiong, J.; Fan, S. A Repetitive Control Scheme for Harmonic Suppression of Circulating Current in Modular Multilevel Converters. IEEE Trans. Power Electron. 2015, 30, 471–481. [Google Scholar] [CrossRef]
- Zhang, M.; Huang, L.; Yao, W.; Lu, Z. Circulating Harmonic Current Elimination of a CPS-PWM-Based Modular Multilevel Converter with a Plug-In Repetitive Controller. IEEE Trans. Power Electron. 2014, 29, 2083–2097. [Google Scholar] [CrossRef]
- Zeng, R.; Xu, L.; Yao, L.; Finney, J.S.; Wang, Y. Hybrid HVDC for Integrating Wind Farms with Special Consideration on Commutation Failure. IEEE Trans. Power Deliv. 2016, 31, 789–797. [Google Scholar] [CrossRef]
- Dekka, A.; Wu, B.; Yaramasu, V.; Fuentes, L.R.; Zargari, R.N. Model Predictive Control of High-Power Modular Multilevel Converters–An Overview. IEEE J. Emerg. Sel. Top. Power Electron. 2018. (Early Access). [Google Scholar] [CrossRef]
- Leuer, M.; Lönneker, M.; Böcker, J. Model predictive control strategy for multi-phase thyristor matrix converters—Advantages, problems and solutions. In Proceedings of the 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 6–8 September 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Guo, P.; He, Z.; Yue, Y.; Xu, Q.; Huang, X.; Chen, Y.; Luo, A. A Novel Two-Stage Model Predictive Control for Modular Multilevel Converter with Reduced Computation. IEEE Trans. Ind. Electron. 2019, 66, 2410–2422. [Google Scholar] [CrossRef]
- Qin, J.; Saeedifard, M. Predictive Control of a Modular Multilevel Converter for a Back-to-Back HVDC System. IEEE Trans. Power Deliv. 2012, 27, 1538–1547. [Google Scholar] [CrossRef]
- Böcker, J.; Freudenberg, B.; The, A.; Dieckerhoff, S. Experimental Comparison of Model Predictive Control and Cascaded Control of the Modular Multilevel Converter. IEEE Trans. Power Electron. 2015, 30, 422–430. [Google Scholar] [CrossRef]
- Dekka, A.; Wu, B.; Yaramasu, V.; Zargari, R.N. Model Predictive Control With Common-Mode Voltage Injection for Modular Multilevel Converter. IEEE Trans. Power Electron. 2017, 32, 1767–1778. [Google Scholar] [CrossRef]
- Zhou, D.; Yang, S.; Tang, Y. A Voltage-Based Open-Circuit Fault Detection and Isolation Approach for Modular Multilevel Converters with Model-Predictive Control. IEEE Trans. Power Electron. 2018, 33, 9866–9874. [Google Scholar] [CrossRef]
- Perez, A.M.; Rodriguez, J.; Fuentes, J.E.; Kammerer, F. Predictive Control of AC–AC Modular Multilevel Converters. IEEE Trans. Ind. Electron. 2012, 59, 2832–2839. [Google Scholar] [CrossRef]
- Dekka, A.; Wu, B.; Yaramasu, V.; Zargari, R.N. Integrated model predictive control with reduced switching frequency for modular multilevel converters. IET Electr. Power Appl. 2017, 11, 857–863. [Google Scholar] [CrossRef]
- Vatani, M.; Bahrani, B.; Saeedifard, M.; Hovd, M. Indirect Finite Control Set Model Predictive Control of Modular Multilevel Converters. IEEE Trans. Smart Grid 2015, 6, 1520–1529. [Google Scholar] [CrossRef] [Green Version]
- Liu, P.; Wang, Y.; Cong, W.; Lei, W. Grouping-Sorting-Optimized Model Predictive Control for Modular Multilevel Converter with Reduced Computational Load. IEEE Trans. Power Electron. 2016, 31, 1896–1907. [Google Scholar] [CrossRef]
- Gong, Z.; Dai, P.; Yuan, X.; Wu, X.; Guo, G. Design and Experimental Evaluation of Fast Model Predictive Control for Modular Multilevel Converters. IEEE Trans. Ind. Electron. 2016, 63, 3845–3856. [Google Scholar] [CrossRef]
- Dekka, A.; Wu, B.; Yaramasu, V.; Zargari, R.N. Dual-Stage Model Predictive Control with Improved Harmonic Performance for Modular Multilevel Converter. IEEE Trans. Ind. Electron. 2016, 63, 6010–6019. [Google Scholar] [CrossRef]
- Mahmoudi, H.; Aleenejad, M.; Ahmadi, R. Modulated Model Predictive Control of Modular Multilevel Converters in VSC-HVDC Systems. IEEE Trans. Power Deliv. 2018, 33, 2115–2124. [Google Scholar] [CrossRef]
- Moon, J.; Gwon, J.; Park, J.; Kang, D.; Kim, J. Model Predictive Control with a Reduced Number of Considered States in a Modular Multilevel Converter for HVDC System. IEEE Trans. Power Deliv. 2015, 30, 608–617. [Google Scholar] [CrossRef]
- Wang, Y.; Cong, W.; Li, M.; Li, N.; Cao, M.; Lei, W. Model predictive control of modular multilevel converter with reduced computational load. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition–APEC, Fort Worth, TX, USA, 16–20 March 2014; pp. 1776–1779. [Google Scholar] [CrossRef]
- Qin, J.; Saeedifard, M. Reduced Switching-Frequency Voltage-Balancing Strategies for Modular Multilevel HVDC Converters. IEEE Trans. Power Deliv. 2013, 28, 2403–2410. [Google Scholar] [CrossRef]
- Tu, Q.; Xu, Z.; Xu, L. Reduced Switching-Frequency Modulation and Circulating Current Suppression for Modular Multilevel Converters. IEEE Trans. Power Deliv. 2011, 26, 2009–2017. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay Compensation in Model Predictive Current Control of a Three-Phase Inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of SM (N) | 4 | 10 | 50 | 100 | 200 | |
|---|---|---|---|---|---|---|
| Number of control options | Conventional MPC [10,11,12,13] | 70 | 1.8 × 105 | 1.0 × 1029 | 9.1 × 1058 | 1.0 × 10119 |
| Integrated MPC [15] | 125 | 1331 | 1.3 × 105 | 1.0 × 106 | 8.1 × 106 | |
| Indirect MPC-I [16] | 25 | 121 | 2601 | 1.0 × 104 | 4.0 × 104 | |
| Indirect MPC-II [21] | 8 | 14 | 54 | 104 | 204 | |
| Modulated MPC [20] | 5 | 11 | 51 | 101 | 201 | |
| Indirect MPC-III [22] | 5 | 11 | 51 | 101 | 201 | |
| Fast MPC [18] | 2~3 | 2~3 | 2~3 | 2~3 | 2~3 | |
| Proposed MPC (R-MPC) | 1 | 1 | 1 | 1 | 1 | |
| Parameter | Simulation | Experiment |
|---|---|---|
| Rated power (kVA) | 5000 | 2 |
| Rated line voltage (V) | 10,000 | 200 |
| DC bus voltages (V) | 20,000 | 400 |
| SMs per arm | 32 | 8 |
| SM capacitance (μF) | 4700 | 1000 |
| SM capacitor voltage (V) | 625 | 50 |
| Arm buffer inductance (mH) | 2.8 | 2.8 |
| Load inductance (mH) | 1 | 1 |
| Load resistance (Ω) | 0.01 | 1.6 |
| Output frequency (Hz) | 50 | 50 |
| Sampling period (μs) | 100 | 100 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, W.; Huang, S.; Luo, D.; Rong, F. A Reverse Model Predictive Control Strategy for a Modular Multilevel Converter. Energies 2019, 12, 297. https://doi.org/10.3390/en12020297
Guan W, Huang S, Luo D, Rong F. A Reverse Model Predictive Control Strategy for a Modular Multilevel Converter. Energies. 2019; 12(2):297. https://doi.org/10.3390/en12020297
Chicago/Turabian StyleGuan, Weide, Shoudao Huang, Derong Luo, and Fei Rong. 2019. "A Reverse Model Predictive Control Strategy for a Modular Multilevel Converter" Energies 12, no. 2: 297. https://doi.org/10.3390/en12020297
APA StyleGuan, W., Huang, S., Luo, D., & Rong, F. (2019). A Reverse Model Predictive Control Strategy for a Modular Multilevel Converter. Energies, 12(2), 297. https://doi.org/10.3390/en12020297