Integrated Control Strategy for Inductive Power Transfer Systems with Primary-Side LCC Network for Load-Average Efficiency Improvement


Abstract
:1. Introduction
- (1)
- The proposed control method increases the coil-to-coil efficiency and the light load efficiency by reducing the load-independent primary coil current in the primary LCC network. This means that the proposed control can improve the load-average efficiency.
- (2)
- Hardware changes or additional components are not required, hence making it easier to apply the proposed control to the existing IPT system [17]. Moreover, it is possible to maintain the secondary power density and weight, so that the driving distance of EVs is not reduced.
2. Analysis of Proposed Control Strategy
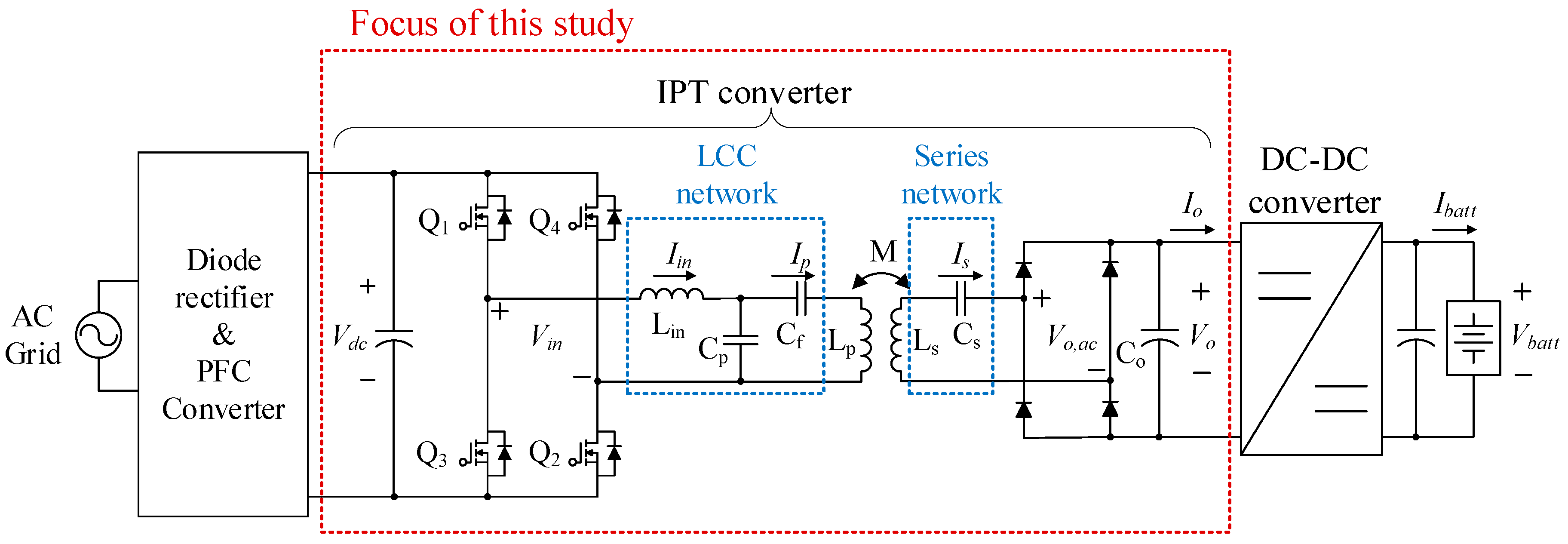
2.1. Configuration and Specifications of IPT System
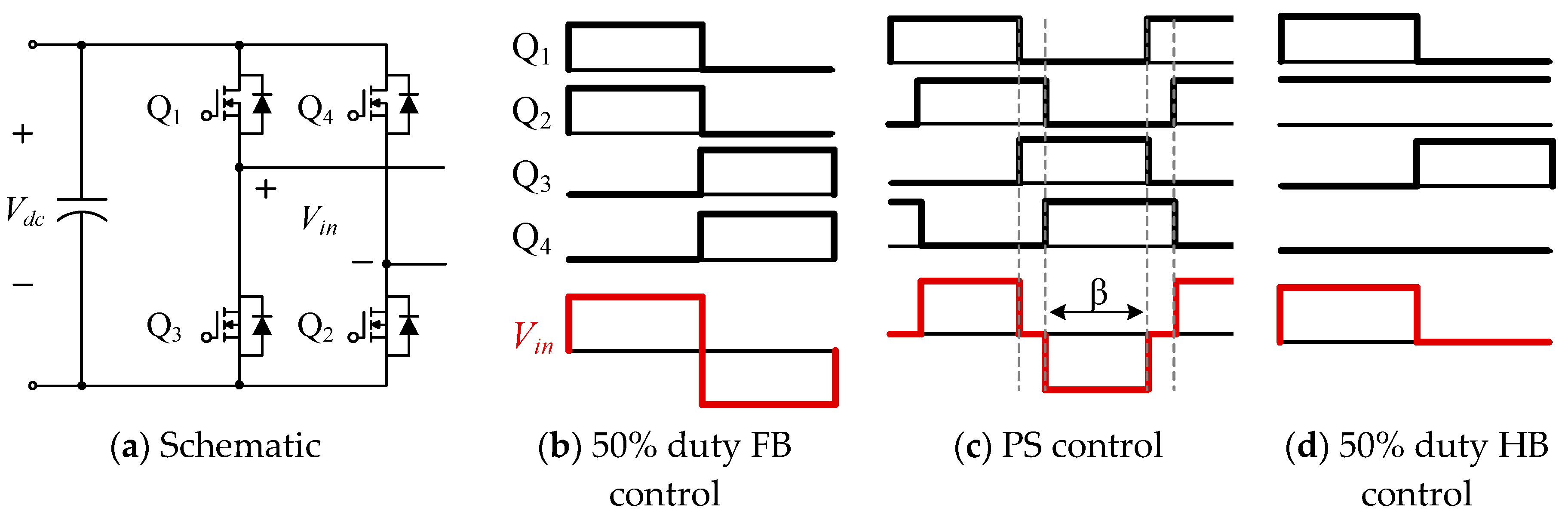
2.2. Analysis of Proposed Control
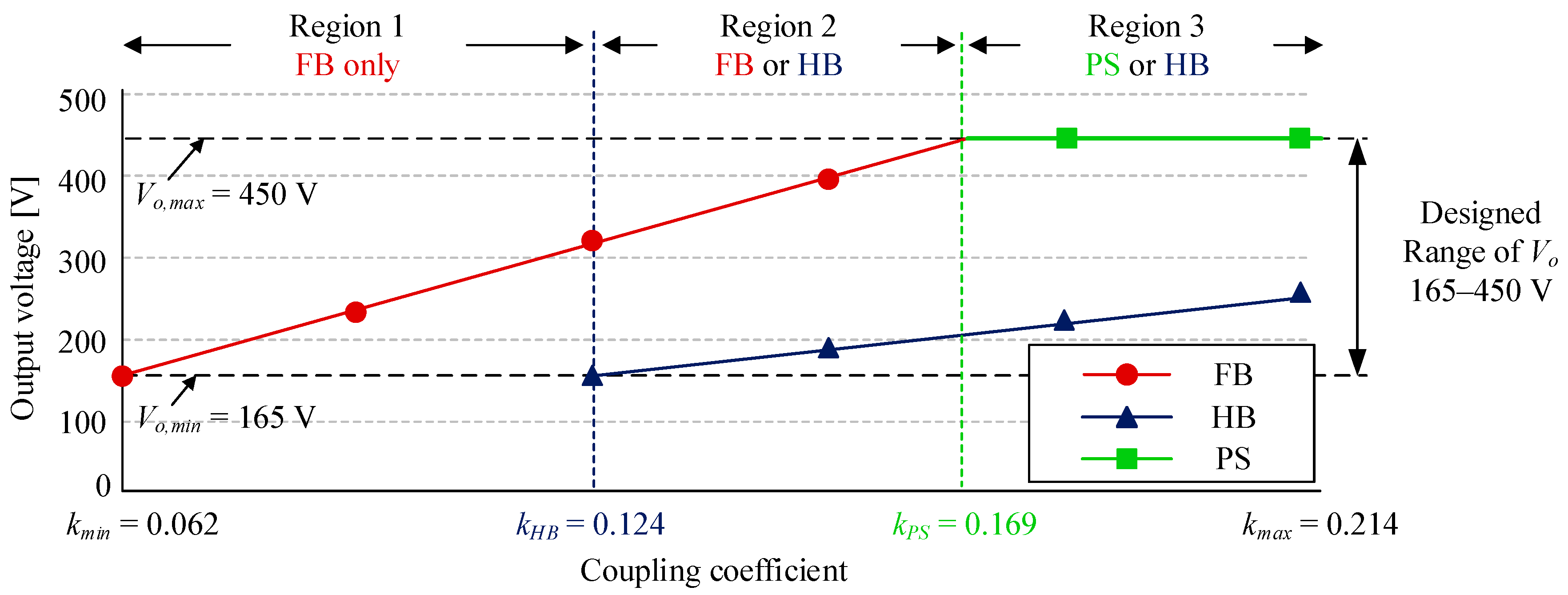
2.3. Selection of Control Mode
- (1)
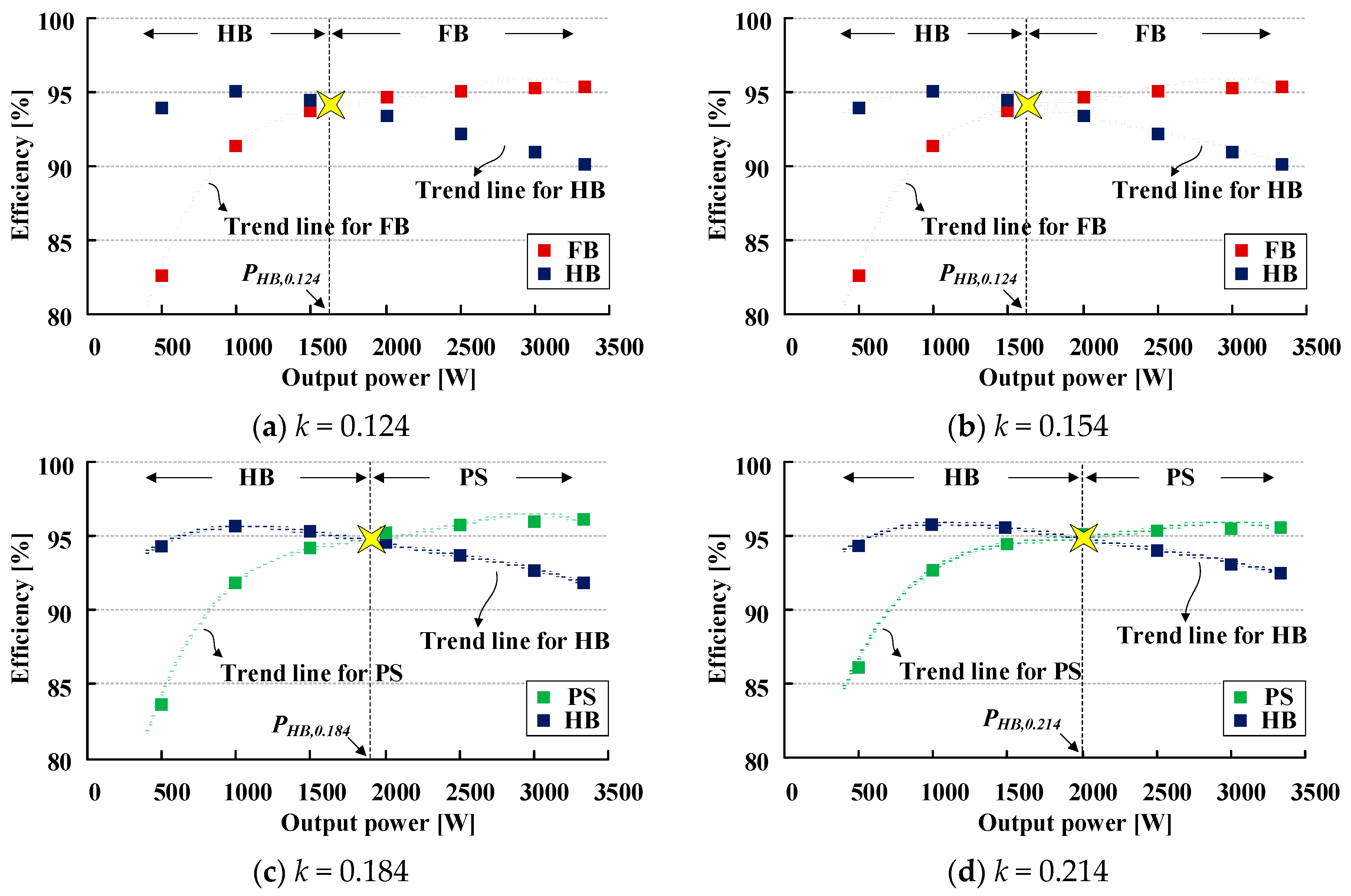
- Draw the efficiency graphs for each control mode in each k condition through numerical loss analysis.
- (2)
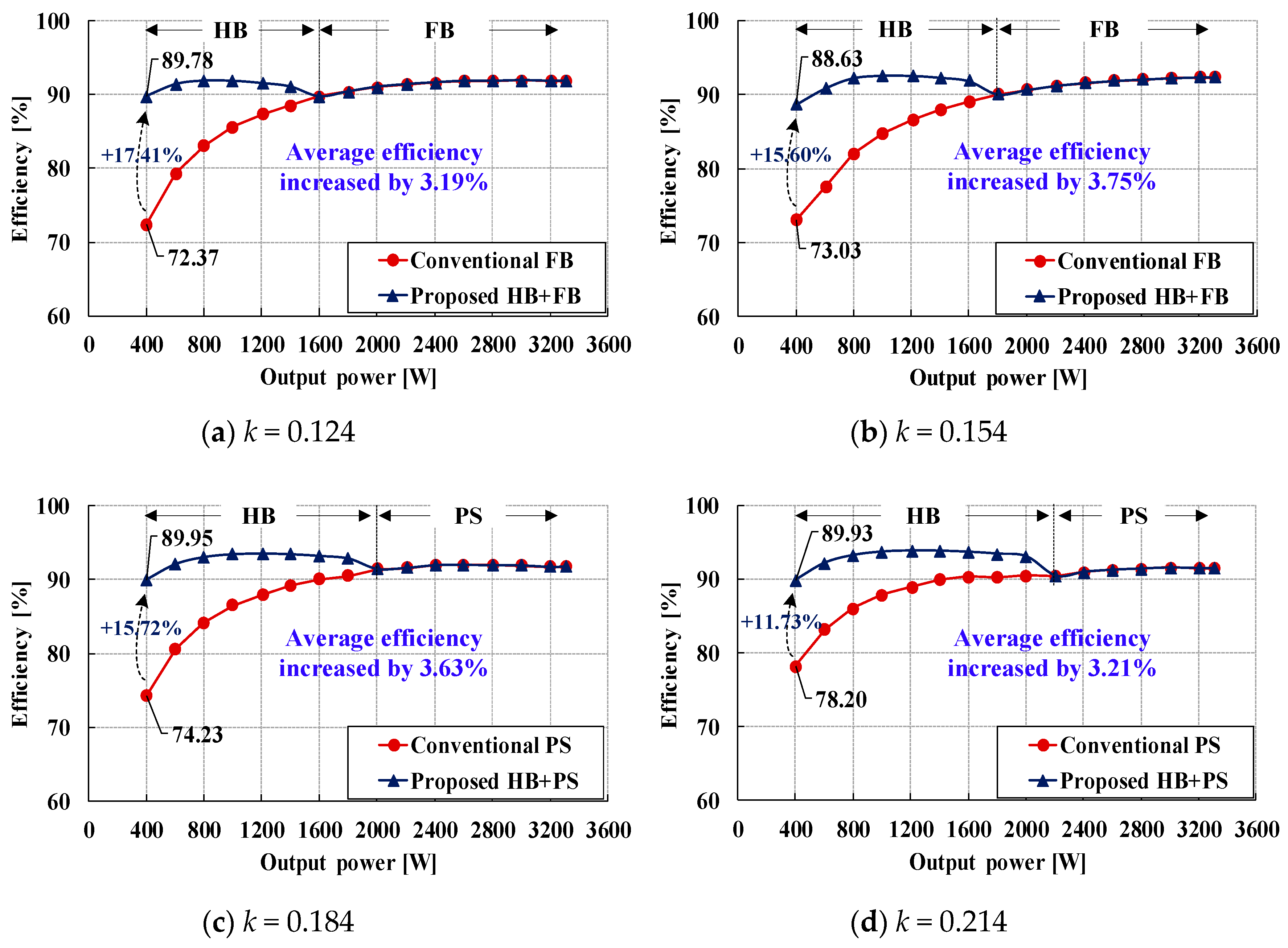
- Derive a trend line for each graph and its function using a graph analysis tool. As shown in Figure 4, the trend line for each efficiency graph is depicted as a dashed line by using the data points at 500 W intervals of the output power. In this study, the trend lines are derived as fourth-order functions to improve the accuracy of the efficiency crossing point prediction.
- (3)
- Calculate the intersection of the two derived functions using a function analysis tool.
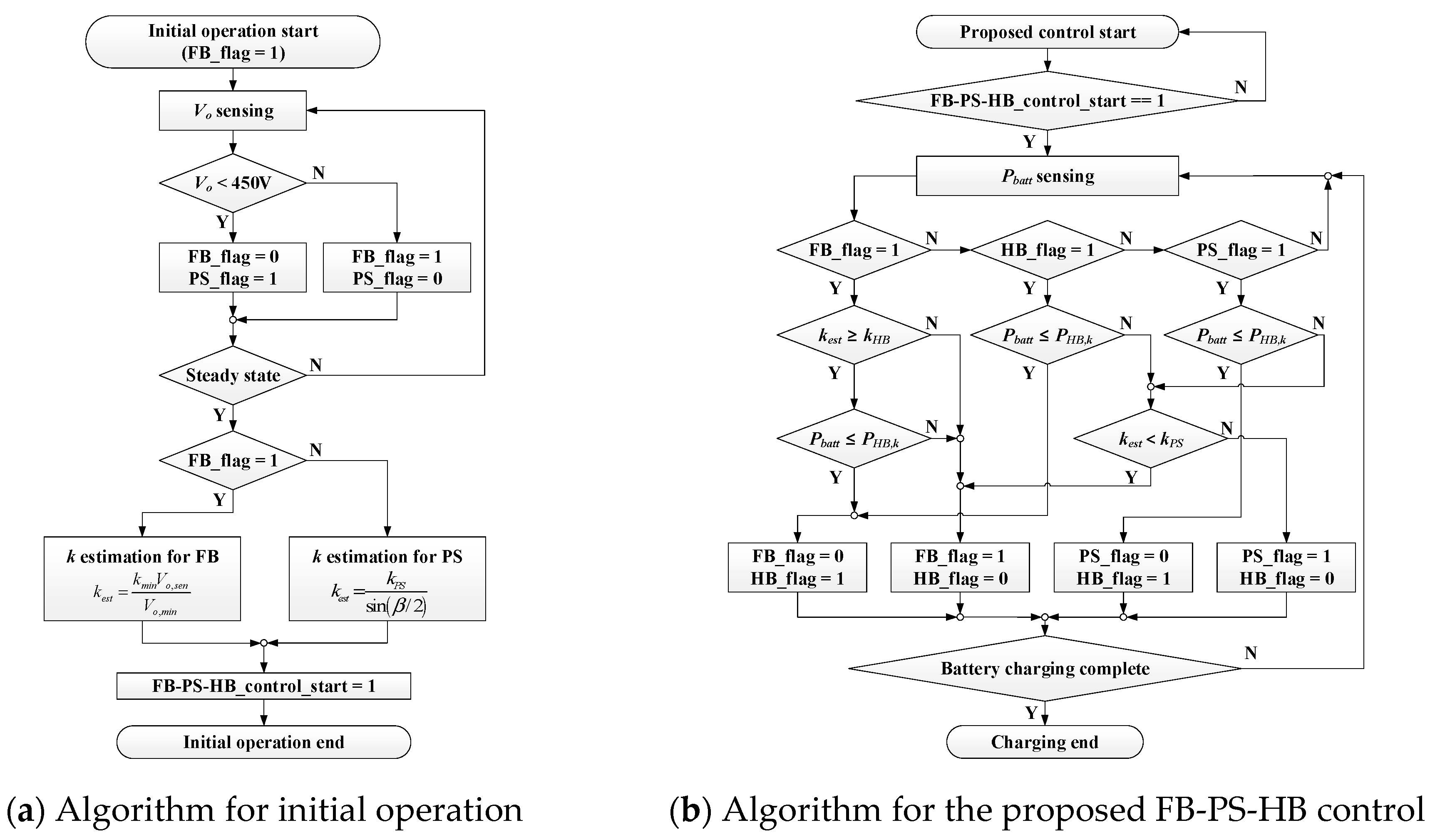
3. Algorithm Implementation for Proposed Control
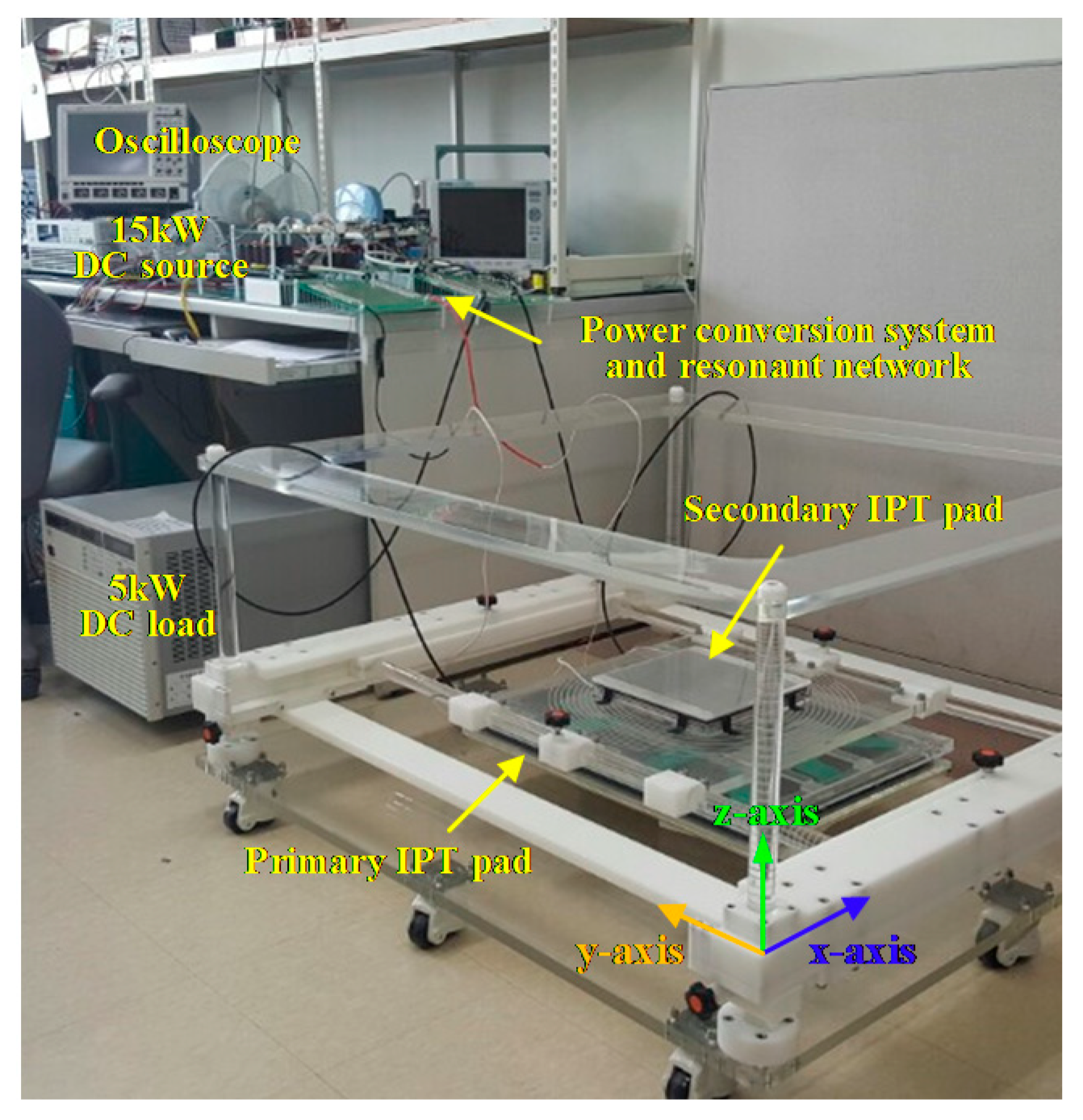
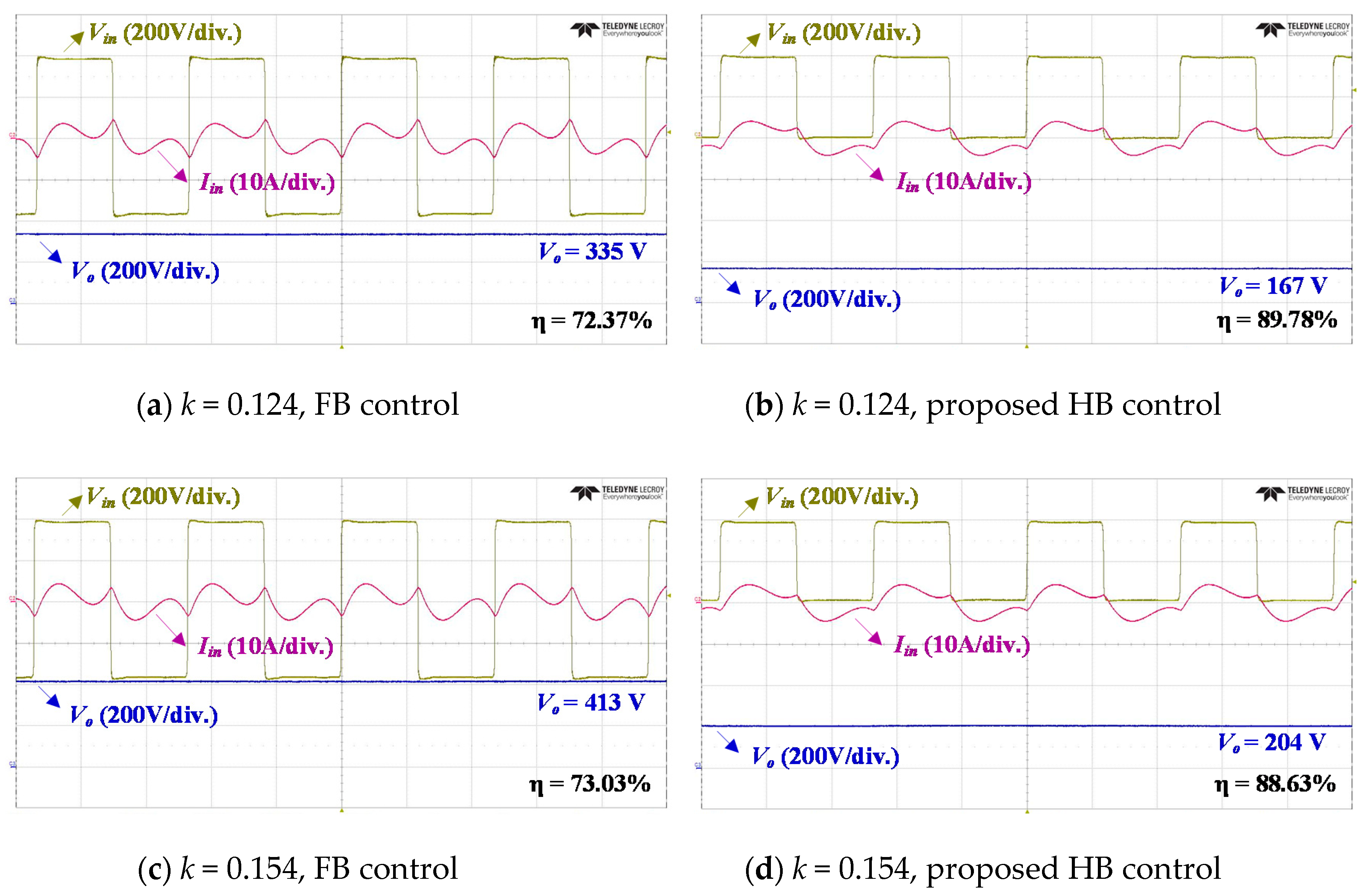
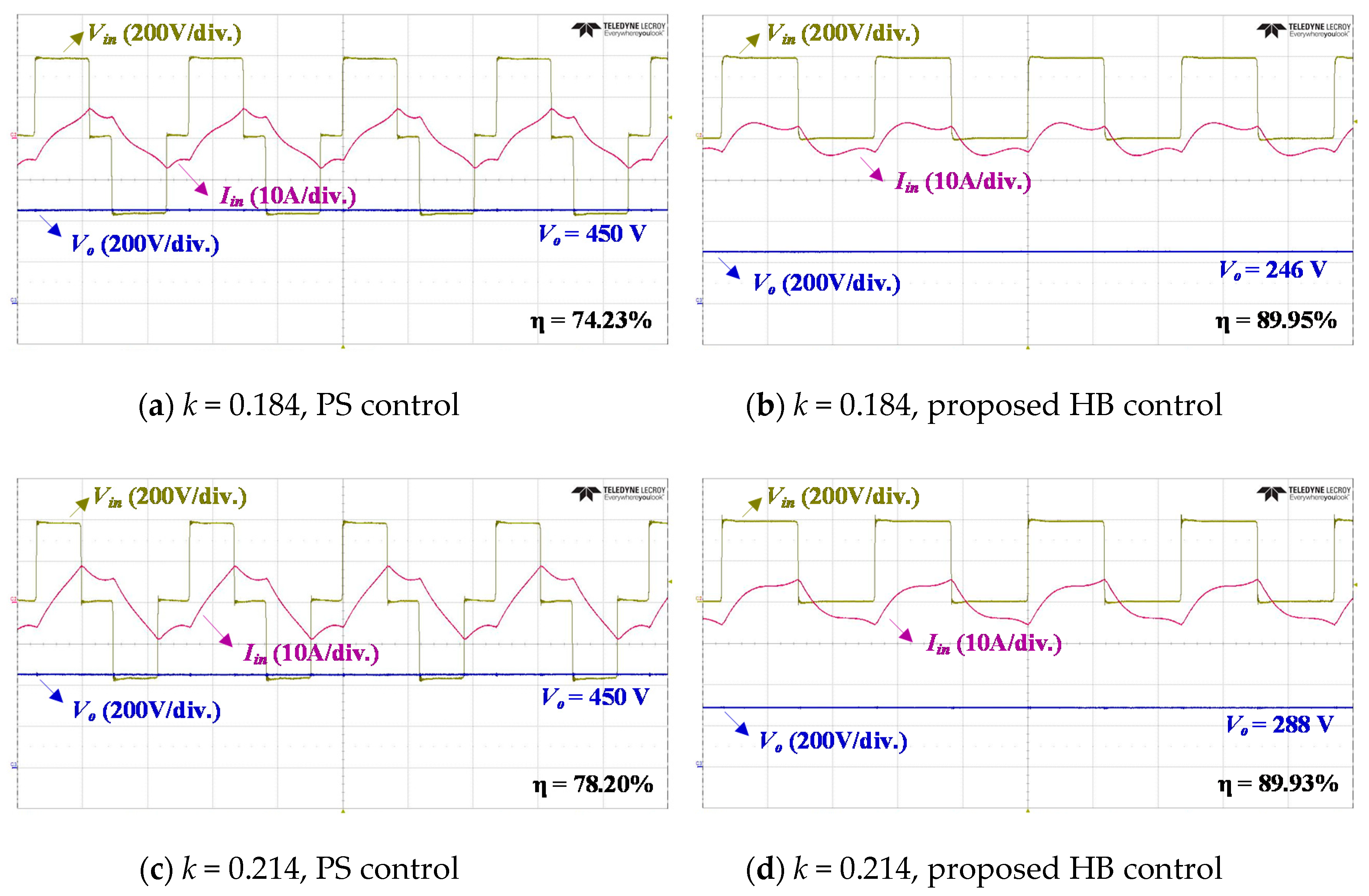
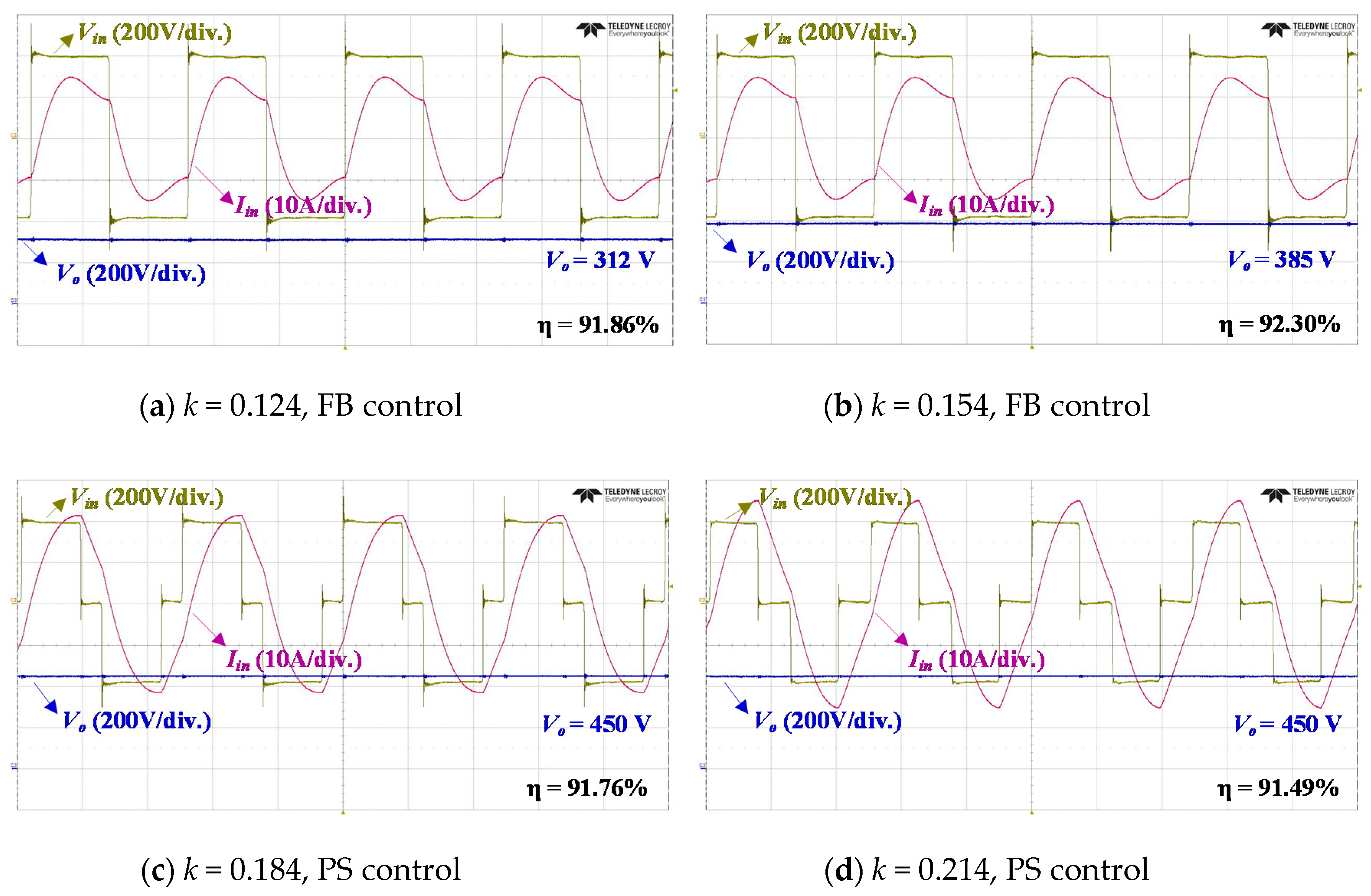
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Schrittwieser, L.; Kolar, J.W.; Soerio, T.B. 99% Efficient Three-Phase Buck-Type SiC MOSFET PFC Rectifier Minimizing Life Cycle Cost in DC Data Centers. CPSS Trans. Power Electron. Appl. 2017, 2, 47–58. [Google Scholar] [CrossRef]
- Xue, F.; Yu, R.; Huang, A.Q. A 98.3% Efficient GaN Isolated Bidirectional DC-DC Converter for DC Microgrid Energy Storage System Applications. IEEE Trans. Ind. Electron. 2017, 64, 9094–9103. [Google Scholar] [CrossRef]
- Ramachandran, R.; Nymand, M. Experimental Demonstration of a 98.8% Efficient Isolated DC-DC GaN Converter. IEEE Trans. Ind. Electron. 2017, 64, 9104–9113. [Google Scholar] [CrossRef]
- Cai, A.Q.; Siek, L. A 2-kW, 95% Efficiency Inductive Power Transfer System Using Gallium Nitride Gate Injection Transistors. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 458–468. [Google Scholar] [CrossRef]
- Huang, Z.; Wong, S.C.; Tse, C.K. Design of a Single-Stage Inductive-Power-Transfer Converter for Efficient EV Battery Charging. IEEE Trans. Veh. Technol. 2017, 66, 5808–5821. [Google Scholar] [CrossRef]
- Karakitsios, I.; Palaiogiannis, F.; Markou, A.; Hatziargyriou, N.D. Optimizing the Energy Transfer, With a High Efficiency in Dynamic Inductive Charging of EVs. IEEE Trans. Veh. Technol. 2018, 67, 4728–4742. [Google Scholar] [CrossRef]
- Vu, V.; Tran, D.; Choi, W. Implementation of the Constant Current and Constant Voltage Charge of Inductive Power Transfer Systems with the Double-Sided LLC Compensation Topology for Electric Vehicle Battery Charge Applications. IEEE Trans. Power Electron. 2018, 33, 7398–9410. [Google Scholar] [CrossRef]
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C.C. A Double-Sided LLC Compensation Network and Its Tuning Method for Wireless Power Transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Li, S.; Mi, C.C. Wireless Power Transfer for Electric Vehicle Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 4–17. [Google Scholar]
- Aditya, K.; Williamson, S.S. Design Considerations for Loosely Coupled Inductive Power Transfer (IPT) System for Electric Vehicle Battery Charging—A Comprehensive Review. In Proceedings of the 2014 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 15–18 June 2014; pp. 1–6. [Google Scholar]
- Bosshard, R.; Kolar, J.W. Inductive Power Transfer for Electric Vehicle Charging: Technical Challenges and Tradeoffs. IEEE Power Electron. Mag. 2016, 3, 22–30. [Google Scholar] [CrossRef]
- Colak, K.; Asa, E.; Bojarski, M.; Czarkowski, D.; Onar, O.C. A Novel Phase-shift Control of Semibridgeless Active Rectifier for Wireless Power Transfer. IEEE Trans. Power Electron. 2015, 30, 6288–6297. [Google Scholar] [CrossRef]
- Mishima, T.; Morita, E. High-Frequency Bridgeless Rectifier Based ZVS Multiresonant Converter for Inductive Power Transfer Featuring High-Voltage GaN-HFET. IEEE Trans. Ind. Electron. 2017, 64, 9155–9164. [Google Scholar] [CrossRef]
- Mai, R.; Yue, P.; Liu, Y.; Zhang, Y.; He, Z. A Dynamic Tuning Method Utilizing Inductor Paralleled with Load for Inductive Power Transfer. IEEE Trans. Power Electron. 2018, 33, 10924–10934. [Google Scholar] [CrossRef]
- Pantic, Z.; Bai, S.; Lukic, S.M. ZCS LCC-Compensated Resonant Inverter for Inductive-Power-Transfer Application. IEEE Trans. Ind. Electron. 2011, 58, 3500–3510. [Google Scholar] [CrossRef]
- Liu, C.; Ge, S.; Guo, Y.; Li, H.; Cai, G. Double-LCL resonant Compensation Network for Electric Vehicles Wireless Power Transfer: Experimental Study and Analysis. IET Power Electron. 2016, 9, 2262–2270. [Google Scholar] [CrossRef]
- Kim, M.; Joo, D.; Lee, B.K. Design and Control of Inductive Power Transfer System for Electric Vehicles Considering Wide Variation of Output Voltage and Coupling Coefficient. IEEE Trans. Power Electron. 2019, 34, 1197–1208. [Google Scholar] [CrossRef]
- Burdio, J.M.; Barragan, L.A.; Monterde, F.; Navarro, D.; Acero, J. Asymmetrical Voltage-Cancellation Control for Full-bridge Series Resonant Inverters. IEEE Trans. Power Electron. 2004, 19, 461–469. [Google Scholar] [CrossRef]
- Jovanovic, M.M.; Irving, B.T. On-the-Fly Topology-Morphing Control-Efficiency Optimization Method for LLC Resonant Converters Operating in Wide Input- and/or Output-Voltage Range. IEEE Trans. Power Electron. 2016, 31, 2596–2608. [Google Scholar] [CrossRef]
- Graovac, D.; Purschel, M.; Kieo, A. MOSFET Power Losses Calculation Using the Data-Sheet Parameters; Infineon Technologies: Dresden, Germany, 2006. [Google Scholar]
- STMicroelectronics. Calculation of Conduction Loss in a Power Rectifier. Available online: https://www.st.com/content/ccc/resource/technical/document/application_note/d6/8b/bb/1b/a8/b4/4d/c6/CD00003894.pdf/files/CD00003894.pdf/jcr:content/translations/en.CD00003894.pdf (accessed on 13 December 2018).
- Haaf, P.; Harper, J. Understanding Diode Reverse Recovery and Its Effect on Switching Losses; Fairchild Semiconductor: Sunnyvale, CA, USA, 2007. [Google Scholar]
- Changsung Corporation. Magnetic Powder Cores. Available online: http://www.mhw-intl.com/assets/CSC/CS C_Catalog.pdf (accessed on 13 December 2018).
- Rubycon Corporation. Technical Notes for Electrolytic Capacitor. Available online: http://rubycon.co.jp/en/pro ducts/alumi/technote3.html#3-2 (accessed on 13 December 2018).
- Ye, Z.; Jain, P.K.; Sen, P.C. A Full-Bridge Resonant Inverter with Modified Phase-Shift Modulation for High-Frequency AC Power Distribution Systems. IEEE Trans. Ind. Appl. 2007, 54, 2831–2845. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | (Unit) |
|---|---|---|
| DC link voltage, Vdc | 380 | (V) |
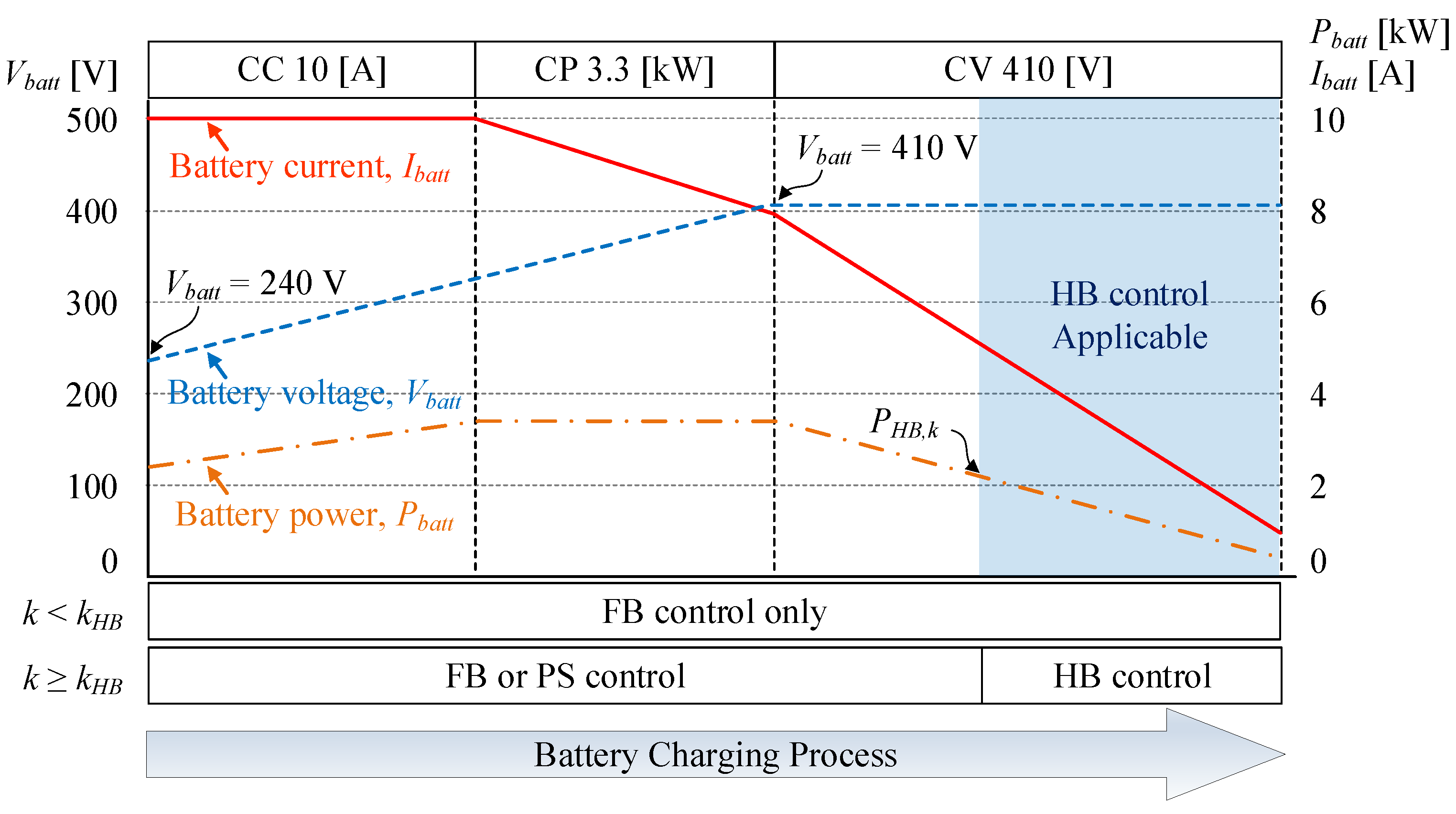
| Output voltage, Vo | 165–450 | (V) |
| Battery voltage, Vbatt | 240–410 | (V) |
| Battery power, Pbatt | 400–3300 | (W) |
| Coupling coefficient, k | 0.062–0.214 | - |
| 50% Duty FB Control | 50% Duty HB Control | Load Dependency |
|---|---|---|
| Vin | Vin/2 | Independent |
| Vo | Vo/2 | Independent |
| Ip | Ip/2 | Independent |
| Iin | 2Iin | Dependent |
| Io | 2Io | Dependent |
| Parameter | Description |
|---|---|
| MOSFETs for FB inverter (Q1–Q4) | IPW65R080CFD (650 (V)/43.3 (A)) |
| Diodes for secondary rectifier (D1–D4) | APT15DQ100BCT (1000 (V)/15 (A)) |
| Digital signal processor | TMS320F28335 |
| Operation frequency | Variable in a range of 81.38–90 (kHz) (Tracking the primary-side zero-phase angle frequency [17]) |
| Range of vertical gap (coil-to-coil) | z = 55–165 (mm) |
| Horizontal misalignment | x/y = ±75/100 (mm) |
| Misalignment condition at k = 0.124 | x/y/z = 60/90/105 (mm) |
| Misalignment condition at k = 0.154 | x/y/z = 90/30/55 (mm) |
| Misalignment condition at k = 0.184 | x/y/z = 60/0/55 (mm) |
| Misalignment condition at k = 0.214 | x/y/z = 0/90/55 (mm) |
| Parameter | Value | (Unit) |
|---|---|---|
| Input inductor, Lin | 48.41 | (μH) |
| Primary inductor, Lp (22 turns) | 506 | (μH) |
| Secondary inductor, Ls (23 turns) | 227 | (μH) |
| Primary compensation capacitor, Cp | 72.42 | (nF) |
| Primary filter capacitor, Cf | 7.67 | (nF) |
| Secondary series capacitor, Cs | 15.42 | (nF) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ann, S.; Lee, W.-Y.; Choe, G.-Y.; Lee, B.K. Integrated Control Strategy for Inductive Power Transfer Systems with Primary-Side LCC Network for Load-Average Efficiency Improvement. Energies 2019, 12, 312. https://doi.org/10.3390/en12020312
Ann S, Lee W-Y, Choe G-Y, Lee BK. Integrated Control Strategy for Inductive Power Transfer Systems with Primary-Side LCC Network for Load-Average Efficiency Improvement. Energies. 2019; 12(2):312. https://doi.org/10.3390/en12020312
Chicago/Turabian StyleAnn, Sangjoon, Woo-Young Lee, Gyu-Yeong Choe, and Byoung Kuk Lee. 2019. "Integrated Control Strategy for Inductive Power Transfer Systems with Primary-Side LCC Network for Load-Average Efficiency Improvement" Energies 12, no. 2: 312. https://doi.org/10.3390/en12020312
APA StyleAnn, S., Lee, W. -Y., Choe, G. -Y., & Lee, B. K. (2019). Integrated Control Strategy for Inductive Power Transfer Systems with Primary-Side LCC Network for Load-Average Efficiency Improvement. Energies, 12(2), 312. https://doi.org/10.3390/en12020312