1. Introduction
Modern technology consumes large amounts of electrical energy. This energy is usually generated in power plants where different energy sources are converted into electrical energy. Each power plant type and energy source have their own advantages, drawbacks, and conversion efficiencies, but in addition, many of them raise environmental concerns due to the excess of pollutants produced in the conversion procedure.
Although the energy conversion efficiency of power plants can be improved, the pollution and residues generated cannot always be reduced. In this context, renewable energy sources, as hydro power, wind farms, PV (photovoltaic) plants, and the oceans energy, must be profitable to favor a more sustainable development that is respectful with the natural environment.
Depending on the physical characteristic considered, the oceans and sea waters offer different ways to collect the energy of water in movement, namely: Tides, sea-waves, and marine currents. Each water displacement type requires different technologies and transducers for collecting its energy [
1].
Wave energy can be a promising energy source. Indeed, the areas of the world having larger wave energy resources are those subjected to regular wind fluxes. There are different harvesting methods. Linear-oscillating magnetic transducers can be used for direct wave energy conversion to electricity. These transducers are usually made with a coil and a permanent magnet [
2].
Sea waves are generated when wind passes over the water surface. As the sea waves propagate slower than the wind speed causing them, the energy is transferred from the wind to the waves. Wind friction on the water surface, and the difference of air pressure between the two wave sides, makes stress on the water, causing the waves growth [
3]. Then, generated waves propagate on the sea surface, and transport their energy to the shore with the group velocity
cwg [
4].
The oscillatory motion is higher at the sea surface, and decreases exponentially with depth, making the waves more independent of sea floor contour conditions as the sea depth increases. For this reason, floating harvesters are more competitive than bottom standing ones. Besides, the available energy is higher in near-shore and off-shore locations than in on-shore placements.
Figure 1 depicts possible placements for floating harvesting devices.
The wave height
H is given by the wind speed, the sea depth, the fetch angle, and the seafloor topography. The average energy density
ds[Ew] per unit area (1) is the sum of the kinetic and potential energy of the wave [
3], where
ρ is the density of sea water,
H is the wave height, and
g is the acceleration of gravitational force. According to the equipartition theorem, both energy types contribute equally to the wave energy. Parameter
kw accounts for the wave periodicity level. Thus,
kw = 1 for random waves, and
kw = 2 for periodic ones.
The energy flux, per unit-width, through a vertical plane that is perpendicular to the wave propagation direction is the average power density (2) per unit-width
dl[Pw]. Then, the average power available
Pw(Le) in a wave-train with
T period and
Le width, can be accounted for with (3). As an example, in a wave train of
H = 1 m, with a period of
T = 10 s, the power density is around 5 kW/m.
Notice that although wave parameters {T, Le, H} determine the available wave energy, the real electric power extracted from the sea will depend additionally on the transducer kind, rating, and conversion efficiency, and finally on the efficiency of the power processing circuits used.
Most systems converting wave energy into longitudinal or angular mechanical energy use the upward and downward movement of the waves at a fixed sea point. Thus, in [
4,
5,
6] electricity is produced by an angular movement using a pulley and a rod to convert a longitudinal movement into an angular one. In this sense, different floating buoys with its respective efficiencies are given in [
7].
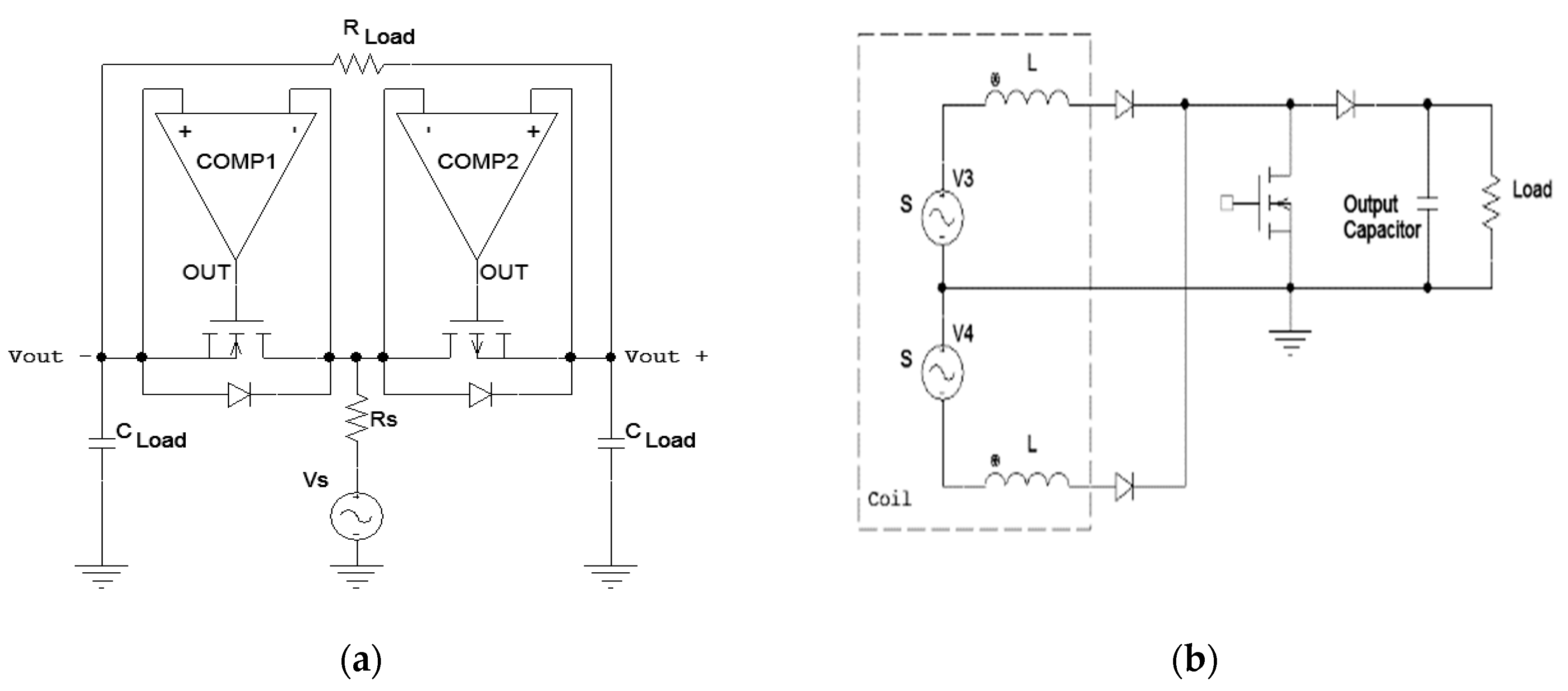
A difficulty with extracting energy from inductive magnetic energy harvesters is that they normally produce a low AC voltage magnitude at a very low frequency (<10 Hz), and boost transformers cannot be directly used because of their large size. To step-up the voltage many applications propose using a step-up converter after the rectifying stage. Thus, to maximize the harvested energy, the rectifier losses must be reduced. Some literature works propose using voltage multipliers [
8], others propose reducing the rectifier voltage drop using mosfet active rectifiers [
9,
10] as depicted in
Figure 2a. The use of two equal generators in counter-phase connected to a three-wire, two-diode full-wave rectifier, has also been proposed in several works, for example in [
11,
12], and depicted in
Figure 2b.
The harvesting device presented here, shown in
Figure 3, is made with three inductive transducers with a high output voltage peak. As this device delivers a high voltage output, in clear contrast with previous works, no special rectifier circuits are required. Nevertheless, to reduce the rectifier losses, Schottky diodes have been considered for the full bridge rectifier input stage. Indeed, instead of maximizing the device output voltage combining the three transducer coils in series, a different interconnection has been preferred to reduce the device output impedance, as explained in
Section 3.
Impedance matching has been proposed in different works to maximize the energy transfer between the harvesting generator and the load. References [
13,
14,
15,
16,
17,
18] propose the use of a buck-boost power converter operating in discontinuous conduction mode (DCM) as an impedance adaptor, some of them without voltage sensors [
13,
14,
15] because input and output adaptor voltages are quite constant; or including voltage feedback to compensate the generator voltage variations [
15,
16,
17]. Nevertheless, none of them use a harvesting generator with a similar degree of generator voltage variation as proposed in this work. We propose the use of a sliding-mode control to force a switching converter to behave like a loss free resistor (
LFR) [
19] for the impedance adaptor. The inherent robustness to parametric variations of sliding control, can assure a good impedance matching for a wide range of input voltage variation voltage as here.
After this introduction, this work continues as follows. In
Section 2, the operation of the harvesting device presented in this work is analyzed, modelled, and verified experimentally. The principle of using an impedance matching circuit to maximize the collected energy is described in
Section 3. Next, two sliding mode control laws are proposed to force two different switching converters to behave like a
LFR-based impedance adaptors. The first converter, the hybrid buck-boost (HBB) is analyzed in
Section 4, and next, the Sepic converter is studied in
Section 5. The realization of both converters is described in
Section 6.
Section 7 is dedicated to the experimental results, and finally in
Section 8, some conclusions and future research lines, are given.
2. Transducer and Harvesting Device Description
In this work we propose to use this wave energy for small-power, stand-alone applications. The extraction of small amounts of energy from each wave, conveniently stored in a battery, is a solution to supply intermittent operation small equipment, where the peak power consumption is occasional and brief: Weather stations, telecom relays, and similar equipment.
Figure 3c shows the wooden hand-made, articulated harvesting device, developed in our laboratory. This device includes three magnet-coil transducers (mA, mB, and mC).
Figure 3a is depicts one of these transducers. To understand the operation of the real harvesting device appearing in
Figure 3c,
Figure 3b depicts in a simplified way, the front and profile views of the whole generator, and
Figure 3d shows schematically the interaction between the sea waves and the developed generator. To track appropriately the train waves, the balloon floats must have a given amount of water inside, as the floats must only compensate the device weight.
Most harvesting systems that convert wave energy into a longitudinal displacement to drive a coil-magnet based linear generator, use the upward and downward movement of the wave at a fixed point [
11,
19]. In contrast, the system presented in
Figure 3, uses the differential movement between two points of the water surface.
By means of levers, the differential movement caused by a sea wave propagating over the sea is converted into a synchronized horizontal displacement of each magnet through the corresponding coil, inducing a given voltage pulse according to Faraday’s law. As seen in
Figure 3b,d, the transducer mB is moving in counterphase compared to mA and mC, that are moving in phase. This can be compensated electrically by modifying the coils connections, or placing two magnets facing a given magnetic pole, and the remaining magnet, to the opposite one.”
2.1. Harvesting Transducer Operation Principle
The transducer shown in photograph
Figure 3a, a permanent magnet linear generator [
20], is depicted schematically in
Figure 4. According to its operation principle, a permanent magnet is moving inside and outside of a transducer coil winding. This causes a magnetic flux variation through it, that considering the Faraday’s Law, creates a voltage difference across its terminals.
The N-turns coil in
Figure 4a, has been idealized in the equivalent diagram of
Figure 4b, where all the turns are collapsed in a single turn, of zero thickness and radius
R. To produce electricity a magnet of length
L, crosses the coil at a variable speed
v(t). The distance from the magnet center to the coil center is the variable
z. The magnet is modeled as two fictitious magnetic charges of equal value and opposite sign, realizing a magnetic dipole, with both charges separated by the distance
L, the magnet length. This approach shown in
Figure 5, is sufficient for our purposes.
Considering the magnet length
L, and its dipolar moment
m, the equivalent magnetic charges are
, and the magnetic flux density
Bq(z) in the vicinity of a magnetic charge/pole is
The total magnetic field
B(z) created by both model charges at a given point of the permanent magnet axis placed at a distance
z from its center (5), is the sum of contributions of both charges.
The electromagnetic force (EMF) generated by the transducer can be calculated from the total magnetic flux φ created by the dipole charges
±q through the equivalent collapsed loop.
This flux φ is variable because the magnet position
z in respect to the coil is changing because the magnet is moving with a certain speed
v(t), along the axis spire. Applying Faraday's law to the whole flux produced (6), the EMF induced
ε(t) in the spire is given by (9), where the charges values
±q have been changed by their equivalent value in terms of the magnetic dipolar moment (
±m/L). When the transducer is placed in a vertical position, the velocity
v(t) and the position
z(t) are the result of gravitational acceleration, and the potential
ε(t) becomes (10)
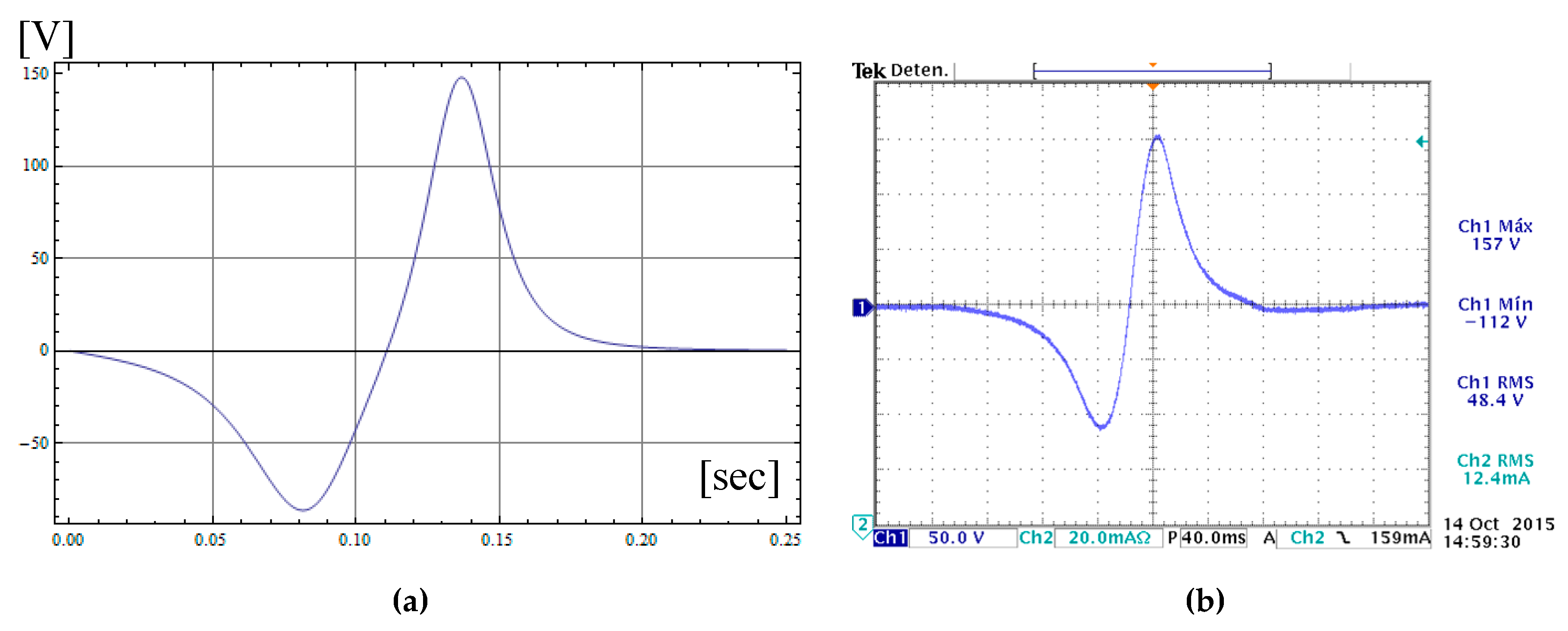
The theoretical voltage waveform
ε (t) given by expression (10) is shown in
Figure 6a, and the real transducer voltage at no-load conditions is given in
Figure 6b. The magnet parameters are
R = 2.5 cm,
L = 6 cm,
m = 5.15·10
−4 Am
2, and the coil has
N = 7000 turns of a copper wire with a diameter of φ = 0.3 mm. The measured inductance and resistance are respectively
LT = 3
H and
RT = 424 Ω.
The experimental pulse waveform shown in
Figure 6b corresponds to a single transducer with all the partial coil windings are connected in series, and therefore
N = 7000 turns. These 7000 turns are organized in five partial windings, three of 1000 turns, and two of 2000 turns. These windings are organized as described in
Table 1. Realize that the resistance and inductance of each partial winding (at equal number of turns) is smaller in the inner windings than in the outer ones.
2.2. Final Harvesting Device
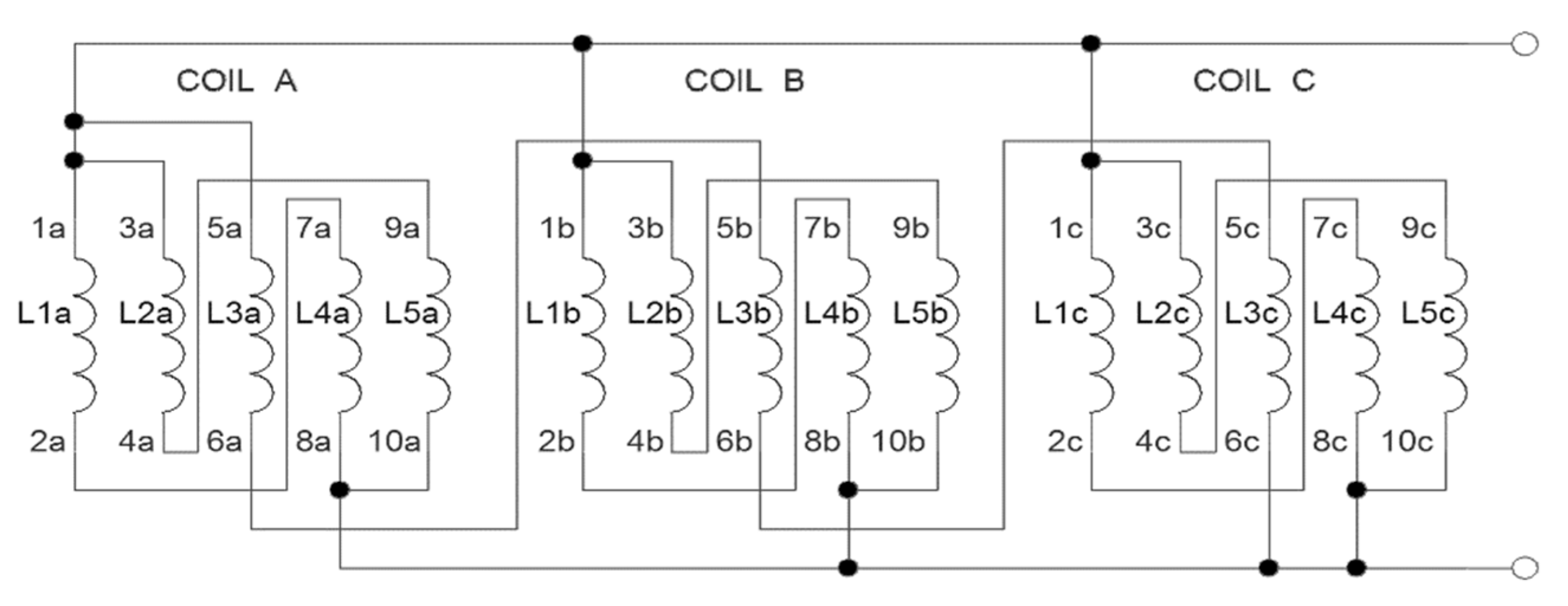
The harvesting device has three interconnected single transducers. The connections realized between the different windings and coils are given in
Figure 7. The final goal is to reduce the device output impedance, increasing also the energy yield.
According to the circuit of
Figure 7, the specific details of the coil-interconnection parameters are given in
Table 2.
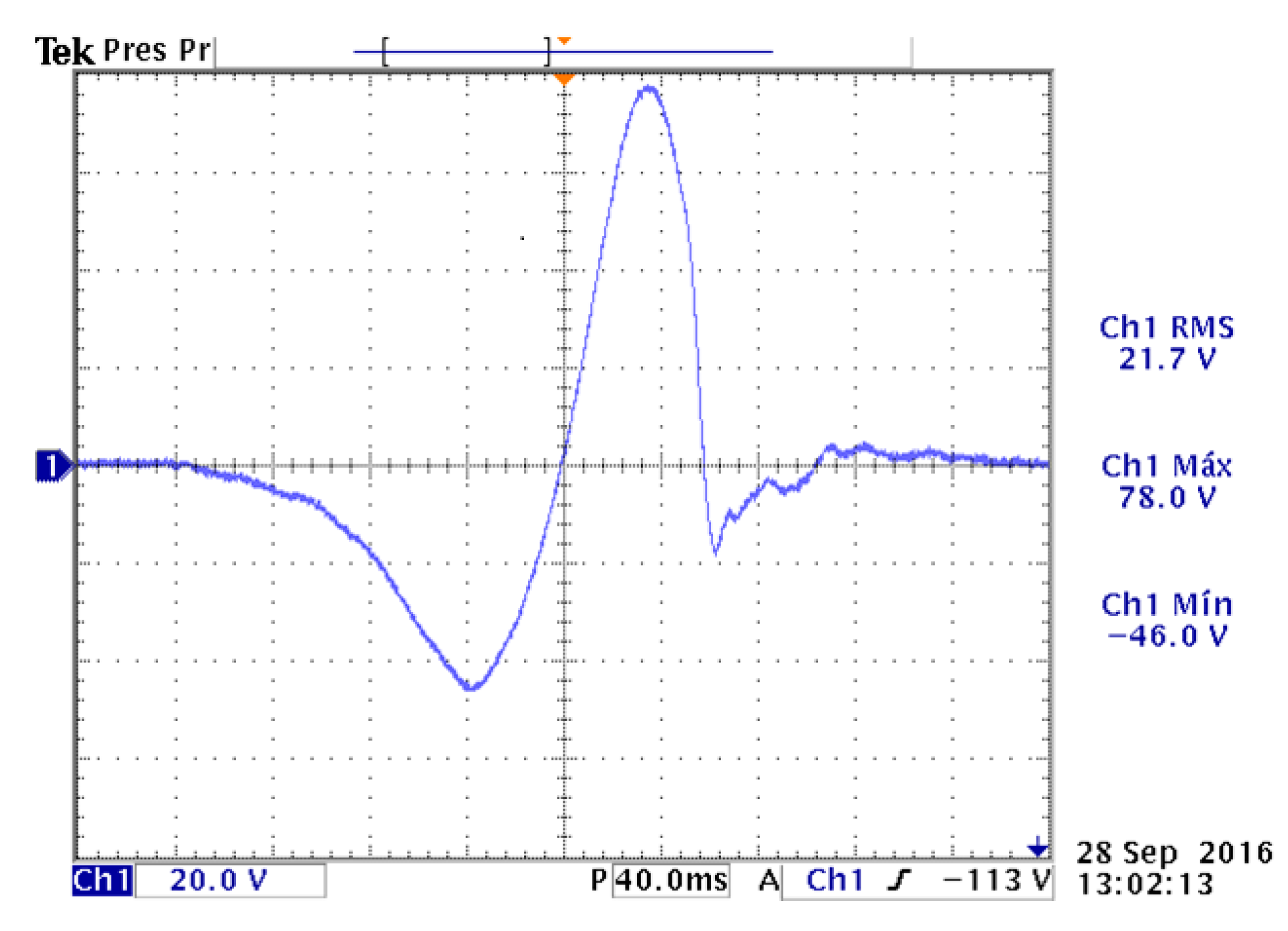
At no-load conditions, the voltage pulse produced by the proposed device is shown in
Figure 8. The final parameters of this generator are:
Rint = 26 Ω,
Lint = 52.8 mH.
3. Impedance Matching with a Loss Free Resistor
The main purpose of the work presented here is to charge the pay-load system battery taking as much as energy as possible from the harvesting generator. If the battery is connected directly to the generator, using only a bridge rectifier, the transferred energy cannot be maximized, in part due to impedance mismatching between the battery and the generator, and in addition, because only the parts of the input voltage pulse waveform exceeding the battery voltage will be profited.
Figure 9 depicts the proposed solution, a matching circuit between the generator and the battery.
Therefore, the impedance adaptation is the only solution to maximize the energy transferred at any working condition. However, even in this case, only 50% of the energy produced in the transducer will be transferred to the load. Indeed, if the conjugate input impedance of the power adaptor were equal to the generator output impedance (11), a perfect adaptation would occur.
For its simplicity, a DC-DC converter behaving as a loss free resistor [
21] is proposed as impedance matching circuit. The
LFR is a two-port circuit with a resistive input impedance
RLFR that can be adjusted. The output port, with a power source characteristic, delivers to the load, in this case the system battery, all the power absorbed by the
LFR input resistance.
Expression (11) shows the generator output impedance
Zo, and
Z*
in, that is the conjugate of the matching circuit input impedance. The numerical values for
Zo and
Z*
in appearing in (11) have been calculated for
Cf = 10 μF, and considering the worst case shown in
Table 3. This means a time lapse between consecutive waves of one second (ΔT = 1 s), although the real one is longer, between 10 and 30 seconds.”
The design of filter capacitor Cf implies three different concerns: (a) the low-pass filter effect must be small because its voltage vcf(t) must track appropriately the generator pulses vp(t), (b) the capacitor must compensate the inductive impedance of the generator, and (c) the capacitor must filter the high frequency switching noise. Finally, the selected value for the capacitor is Cf = 10 μF.
According to circuit of
Figure 8, the instantaneous capacitor voltage
vcf(
t) is given in (12). Next, neglecting the rectifier bridge voltage drop 2
Vd, and assuming impedance matching (
RLFR = 26 Ω), the capacitor voltage
vcf(
t) should be (13) the half of the input pulse absolute value.
The LFR behavior is required for impedance matching, but the appropriate converter to implement the LFR depends on its input and output voltage ranges.
According to the pulse waveform in
Figure 7, the capacitor voltage
vCf(t) experiences a large variation following the voltage pulse
vp evolution. During 250 ms, the generator voltage varies from −100 V <
vp(
t) < 160 V. Once rectified, if impedance matching occurs, the capacitor voltage changes from 0 <
vCf(
t) <
Vmax = 80 V. Thus, using a common 12 V battery, the matching circuit input voltage
vCf(
t) can be greater (
vCf(
t) >
Vbat) or smaller (
vCf(
t) <
Vbat) than the battery voltage. Consequently, any converter proposed as matching circuit must exhibit a buck-boost characteristic.
3.1. DCM Operated Buck-Boost Converter
Since the buck-boost operated at DCM [
19] has a natural
LFR behavior, that converter could be proposed as an impedance matching circuit. From the buck-boost input power in DCM, the expression of the converter input impedance
RLFR can be easily calculated (14)
where
D is the converter duty ratio, and
TS is the switching period. Theoretically, any pair of constant
D and
TS can be used to regulate the input impedance
RLFR = 26 Ω. However, to guarantee that the converter is working in the discontinuous mode, the converter duty ratio
D(
t) must change continuously (15) to follow the
vCf(
t). Therefore, to keep constant, at 26 Ω, the switching frequency
fS(
t) = 1/
TS(
t) must also be adapted continuously.
It can be easily concluded that designing a low consumption control circuit able to adjust continuously the values of duty cycle D(t) and TS (t) to fulfill simultaneously nonlinear Equation (14) and in Equation (15) is very complicated. Besides, the buck-boost converter has output voltage sign inversion, input and output pulsating currents, and, therefore, other solutions must be explored.
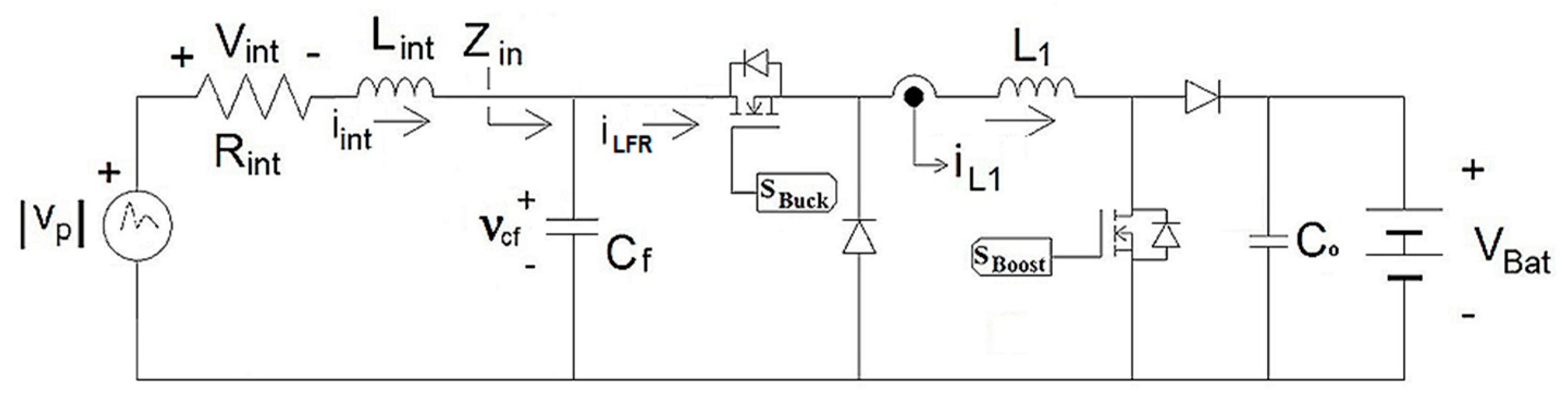
3.2. Buck/Boost Hybrid Converter (HBB)
The buck/boost hybrid converter is shown in
Figure 10. While
vCf(
t) be smaller than the battery voltage
Vbat, the circuit will operate in boost mode, but when
vCf(
t) be greater than the battery one, it will work in buck mode. When the converter is in step-up mode, S
Buck is permanently at ON-state, whereas in the buck working mode S
Boost is permanently at OFF-state.
This converter has a pulsating output current in boost mode and a pulsating input current in buck mode, so there is an electromagnetic interference (EMI) reduction.
To impose a
LFR behavior to both working modes, assuring impedance matching, two sliding control laws must be used, one per each mode. Both control surfaces are analyzed in
Section 4.
The mode selection is done with a comparator, but there is a small dead-zone around Vbat where the converter is not switching to reduce switching losses. This is an advantage compared to a classic step-up/down converter like the buck-boost, Ćuk, or Sepic, that are switching continuously regardless the value of vCf(t) and Vbat. Conversely, in the dead zone, there is no control, and the impedance matching is lost.
3.3. Sepic Converter
Figure 11 depicts the Sepic converter. As in the HBB converter case, there is no output voltage sign change. As happens with the HBB converter in the boost mode, the input current has a triangular waveform whereas the output current is pulsating. In this case, as there is no dead-zone around
Vbat, the impedance matching occurs for any
vcf(
t) value. Besides, as additional advantage, only one sliding-mode control law is required to impose the
LFR behavior for all
vcf(
t) voltage range.
5. Sepic Converter Matching Circuit
In the Sepic converter the controllable inductor is
L1. As in the HBB boost mode, the current through this inductor
iL1(
t) corresponds to the converter input current
iLFR(
t). This circumstance allows using the same control surface
S(
x) to force the
LFR behavior that was proposed for the HBB boost mode in
Section 4.
Figure 14 depicts the two converter topologies.
Again, in the previous cases by means of the switching variable
u(
t) = {0, 1}, the dynamics of the converter at any instant can be described with a single set of differential Equation (32).
The sliding surface (33) imposed to the inductor current
iL1(
t) assures the impedance matching. The equivalent control (34) is deduced from the Equation set (32), using the surface
S(
x) and its related existence conditions.
Forcing to zero the dynamics shown in (32), and considering the equivalent control (34), the equilibrium point (35) and the corresponding ideal dynamics (36) are deduced, which result to be non-linear. As in boost mode, the capacitor voltage at the equilibrium point is again, the half part of the pulse voltage is (
Vcf* =
Vp*/2), corresponding to a situation of impedance matching.
To evaluate the local stability of the proposed surface, the ideal dynamics (32) should be linearized around the equilibrium point
X* using the well-known small signal perturbation model (37), (38). The coefficients of the small signal model are given in (39).
After linearizing (38) the ideal dynamics, the small signal
transfer function (40) is obtained, that evidences the perfect impedance matching is at DC, and good at low frequency, like the sea waves-trains. Realize in (40) that at DC
VCf = 1/2
Vp. When frequency increases the module of
decreases from its maximum value at DC (1/2) and the phase-shift between
VCf and
Vp increases. As in the HBB boost mode, the natural frequency is given by
Lint and the capacitor
Cf.
The Sepic converter is a fifth order system, and the ideal system dynamics should be of fourth order, but expression (40) denotes a second order system. The fourth order dynamics consists of two decoupled pairs of complex conjugated poles that can be factorized in two second order functions as seen in (41). The converter is stable, since all its coefficients of
Da(
s) and
Db(
s) exist and are positive. In a clear contrast to
HCfP(
s), where a pair of complex conjugated poles is hidden, in other system transfer functions the whole dynamics are visible. One of these cases is the
HC1P(
s) transfer function, where according to expressions (42) and (43), the full dynamics is shown. Realize that s expected, at DC conditions
VCf =
VC1.
7. Experimental Verification
The performance of both converters, the hybrid and the Sepic, have been simulated and verified experimentally with two types of input signals. The first signal
vp(
t) is the pulse waveform provided by the harvesting device of
Figure 8. The simulated results are shown in
Figure 19a–f. The second signal
vp(
t) is a sinusoidal waveform, and the simulated and experimental results are given in
Figure 20a–f. Experimental results with a third pulse waveform are in
Figure 21a–d.
In the simulation captions of
Figure 19, the signals shown are:
iL(
t) in blue,
vcf(
t) in black,
iint(
t) in light green, and finally
vint(
t) in red. The currents are shown amplified by a factor 10. Current
iint(
t) is the adaptor input current, this is, the absolute value of the harvesting device current. Signal
vint(
t) is the absolute value of the harvesting device internal voltage drop, this is
vint(t) =
Rint · iint(
t). If impedance matching occurs, then
vint(
t) must coincide with
vcf(
t), the adaptor input voltage.
The simulated cases are the following:
Figure 19a HBB with only the boost mode enabled;
Figure 19b HBB only enabling the buck mode; in cases
Figure 19c,d the HBB adaptor can work with both modes, but the capacitor value is
Cf = 10 μF in case
Figure 19c, and
Cf = 200 μF in case
Figure 19d; and finally cases
Figure 19e,f depict the Sepic converter, using
Cf = 10 μF in
Figure 19e and with
Cf = 200 μF in
Figure 19f.
As expected, and verified in
Figure 19, in the Sepic converter, the adaptor input current
iint(
t) and the inductor current
iL1(
t) are equal, but in the HBB converter both currents only coincide in the boost mode, in the buck mode both currents are different. The effect of the C
f filter capacitor can also be observed. When its value is 200 μF,
vcf(
t) and
vint(
t) are different. There is a phase shift between them, and therefore the impedance matching is not perfect. Finally, in
Figure 19a,b it can be appreciated that impedance matching occurs only when a converter is switching. In the HBB boost mode, the impedance matching only happens when
vcf(
t) <
Vbat, see
Figure 19a, whereas in the buck mode, impedance matching takes place only when
vcf(
t) >
Vbat, as can be seen in
Figure 19b.
Figure 20 depicts the simulated and experimental results obtained with a sinusoidal waveform for
vp(
t). Both converters have been tested at different frequencies from 50 Hz to 200 Hz. Realize that in a sea wave-train, waves are separated 10–20 seconds, implying a wave-train frequency of 0.05 Hz–0.1 Hz. In this way, a wave pulse can stand for 0.25–2.5 seconds, that corresponds to a range of fundamental frequencies of 0.4 Hz–4 Hz. To assure a good behavior with sea waves, the tests have been made at unrealistically high frequencies for the harvesting device. If the tests are satisfactory, the
vCf(
t) tracking behavior of a real sea-wave pulse voltage
vp(
t) will deliver even better results.
The signals shown at
Figure 20 are the following: The input adaptor voltage
vCf(
t) in shown in dark blue, the inductor current
iL1(
t) in cyan color, the HBB buck mode switch gate signal
Sbuck(
t) is shown light green, and finally the Sepic switch, and the HBB boost mode switch gate signals
Ssepic(
t) and
Sboost(
t) are shown in pink.
The oscilloscope captions at
Figure 20c,d corresponding to the real experimental test at 50 Hz show a good agreement with the corresponding simulated results, also at 50 Hz. The experimental results at 200 Hz, show that at his frequency the filtering effect of
Cf = 10 μF does not allow the adaptor input voltage
vCf(
t) to drop at zero volts.
Figure 20a shows clearly the dead-zone effect around
Vbat = 12 V, where the HBB operating in boost mode changes to buck operation mode and vice-versa. Comparing the HBB and the Sepic converter experimental results, the adaptor input voltage
vCf(
t) exhibit a small ripple in the Sepic case and in the HBB operation mode because the adaptor input current
iint(
t) is the inductor one
iL1(
t). Conversely, in the HBB buck mode, the adaptor input current
iL1(
t) is a pulsating one, and the ripple is higher.
Figure 21 depicts the experimental results using a laboratory programmable power supply that delivers a train of voltage pulses imitating a sea wave-train. Each voltage pulse reproduces the harvesting-device pulse given in
Figure 8. This power supply supplies the impedance matching circuit through a series resistor of 26 Ω reproducing the harvesting device output impedance.
The captions in
Figure 21a–d show two waveforms. The voltage-drop in the 26 Ω resistance
vint(
t) is shown in pink color, whereas the impedance matching circuit input voltage
vCf(
t) is shown in dark blue color. As can be seen in these figures, there is a good agreement between both curves proving the correct behavior of the impedance matching circuit, for both converters: The HBB and the Sepic converter. The remaining captions,
Figure 21e,f, show various signals from the HBB and the Sepic converters, respectively. The signals shown in these captions are:
vint(
t) in cyan color,
vCf(
t) in dark blue,
Sboost(
t) and
Ssepic(
t) in pink color, and finally
Sbuck(
t) in light grey.
The input impedance
Zin, and the
ηM matching efficiency (44) for both converters are depicted in
Figure 22a–d. The data shown in these graphs have been obtained along with the sinusoidal experiments of
Figure 20. Three different frequencies are used: 50 Hz (red), 100 Hz (blue), and 200 Hz (green). The HBB and the Sepic converter input impedances
Zin are plotted, respectively, in
Figure 22a,b.
The impedance matching efficiency
ηM (44) of both converters is shown
Figure 22c,d. That matching efficiency has been defined as the ratio between the power absorbed by the converter, and the power absorbed by the converter in case of an ideal matching, when
Zin =
Rint = 26 Ω.
This experimental section ends with two photographs given in
Figure 23. Thus,
Figure 23a shows the experimental workbench testing the HBB converter, whereas
Figure 23b show the same environment with the Sepic converter.
8. Conclusions
Although extracting electric power from sea-waves at great scale is worldwide developing, the extraction of small amounts of energy from the waves, conveniently stored in a battery, can be solution to supply small stand-alone equipment, with occasional and short-lived power consumption peaks: Weather stations, telecom relays, and similar equipment.
The design, simulation, realization, and verification of an inductive harvesting generator that profits the differential position of two sea-surface points has been presented. This device supposes a novelty compared to sea-wave energy buoys and harvesting devices based on the vertical oscillation of a single sea point.
The proposed harvesting generator is made with three transducers, that are based on a coil-magnet arrangement, where a permanent magnet moves linearly inside the coil. The generator operation has also been simulated and verified experimentally.
Next, two switching converters, a hybrid buck-boost cell and a Sepic converter have been proposed, analyzed, and verified experimentally as matching circuits to transfer the energy from the harvesting device to the storage 12 V battery. Two different sliding mode control surfaces are required to guarantee the impedance matching using the HBB converter. Thus, during the boost mode the corresponding surface controls the input current, whereas in the buck mode, the surface controls the output current. Conversely, a clear advantage of the Sepic converter is that only a single surface is needed for the same purpose, because in this case the adaptor circuit input current is always the controllable inductor current. Indeed, the Sepic converter control law is the same that has been used for the boost mode operation in the HBB converter.
The main difference between both adaptor circuits is their behavior when the adaptor input voltage vCf(t) coincides with the battery voltage. While the hybrid converter must change its operation mode, nothing happens with the Sepic converter. In the hybrid converter case, there is an input voltage dead-zone where the converter is not switching. Although the switching losses disappear, as the converter becomes uncontrolled, the impedance matching is lost during those instants.
Both converters behave reasonably well, and show good results matching the generator output impedance and the converter input impedance, as shown in the extensive experimental and simulation results. In both cases, as can be seen in
Figure 23a,b there is a slight variation of the adaptor input resistance, due the current sensor lack of linearity working in a wide range of current values, the variable delay caused by the mosfet drivers, and finally the converter efficiency, which is not obviously constant along the input voltage range. Anyway, the matching efficiency is always over 95% whatever be the input voltage, as can be seen in
Figure 22c,d.
To reduce the input impedance variation in terms of the input voltage, the hysteresis width used to implement the sliding surfaces by means of hysteretic comparators must be reduced. Nevertheless, although this would increase the tracking precision, leading to a slight increment of the matching efficiency, maybe the switching losses would be greatly increased leading to a global reduction of the energy delivered to the storage battery.
In this paper two switching converters operating as impedance matching circuits have been studied. To achieve this, they must be forced to behave like a loss free resistor, and here sliding mode control is introduced as an easy technique to assure this behavior in a wide range of input and output voltage variations. Buck-boost and similar converters in DCM operation are used in the literature for this proposal, in harvesting applications, but the input voltage variation range is usually small. The solution proposed here allows impedance matching and loss free resistor behavior with harvesting generators with a wide input voltage variation range. The simplicity of the sliding mode control technique, its inherent robustness against parametric variation, and input and output disturbances, are the main advantages of the technique proposed here.
These issues, as other related to a different configuration of the harvesting device coils will be the subject of a future research.

 ,
, 
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}