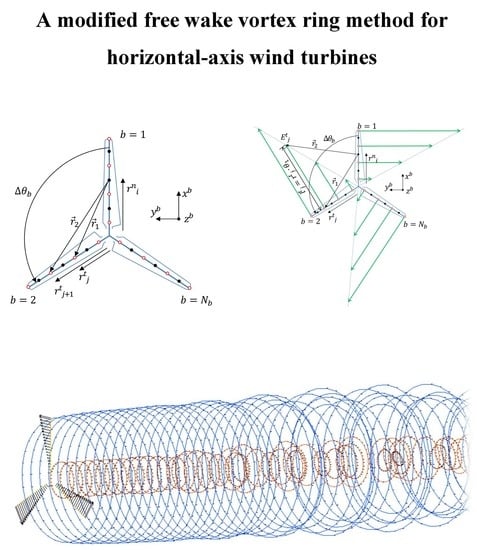
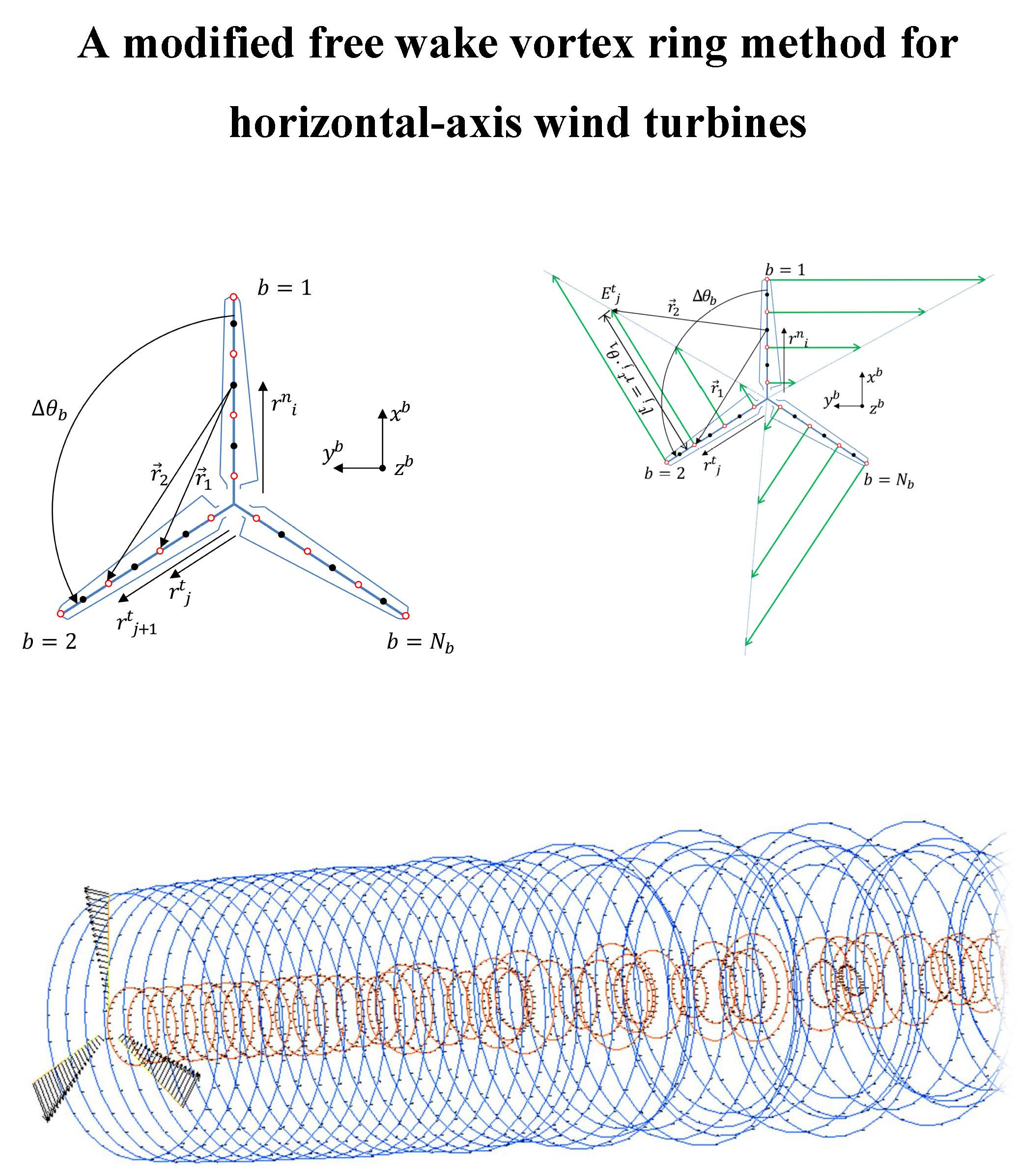
A Modified Free Wake Vortex Ring Method for Horizontal-Axis Wind Turbines

Abstract
:
1. Introduction
2. Vortex Ring Theory
2.1. Velocity Induced by a Vortex Filament
2.2. Velocity Induced by an Axis-Symmetric Vortex Ring
3. Numerical Model
3.1. Near Wake Models
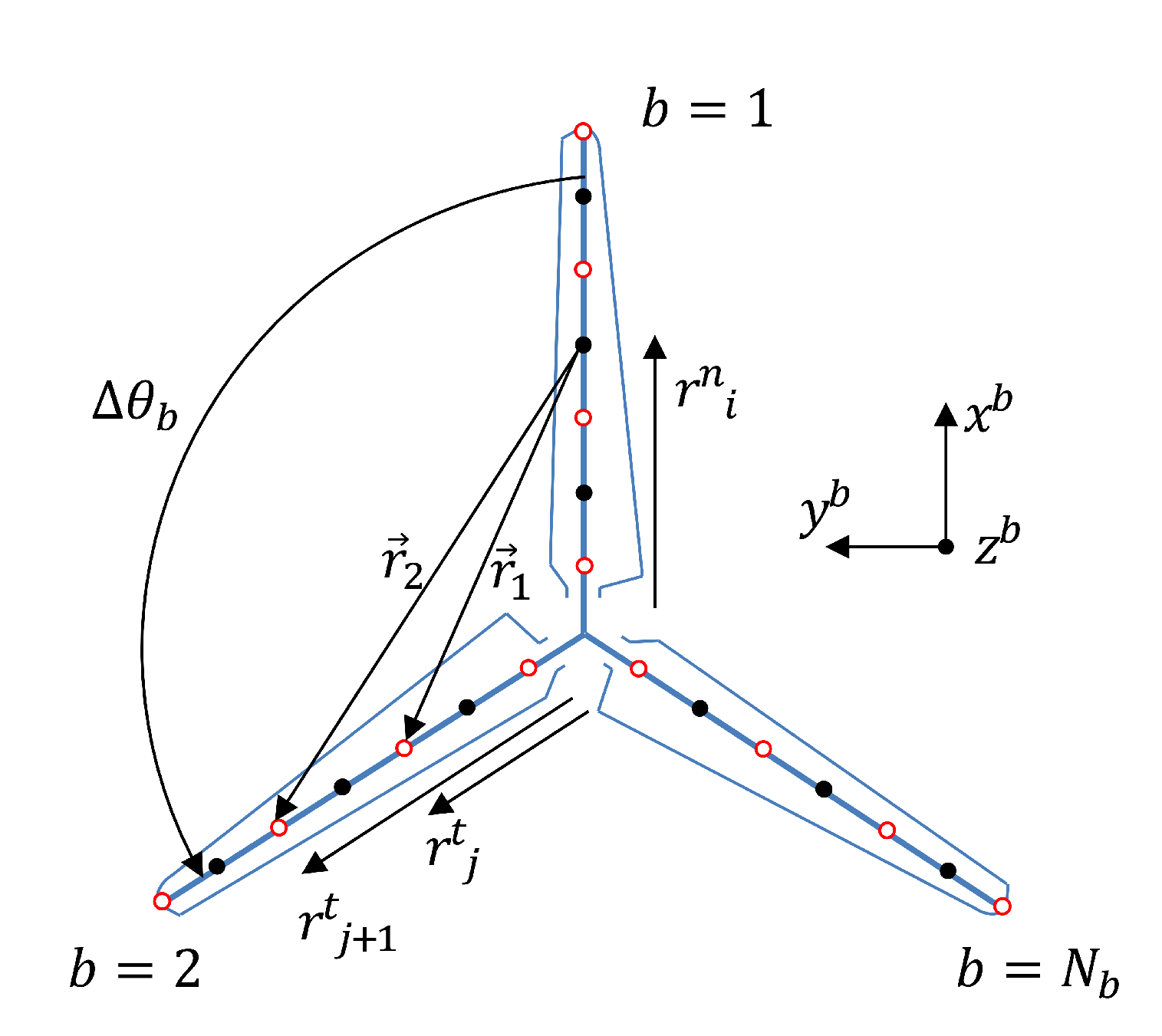
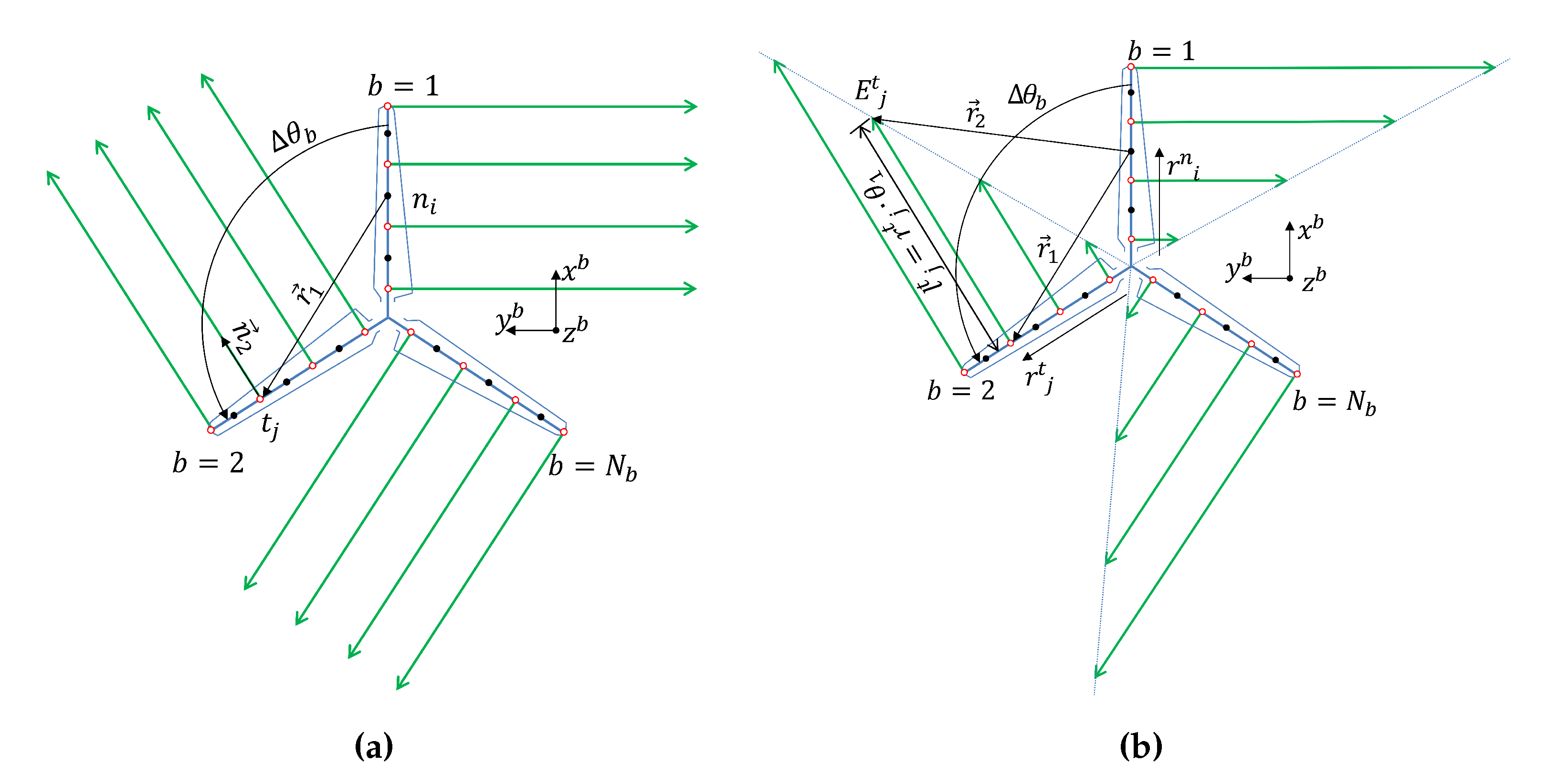
3.1.1. Blade Bound Vortex Model
3.1.2. Trailed Vortex Model
3.1.3. Total Induced Velocity of the Near Wake
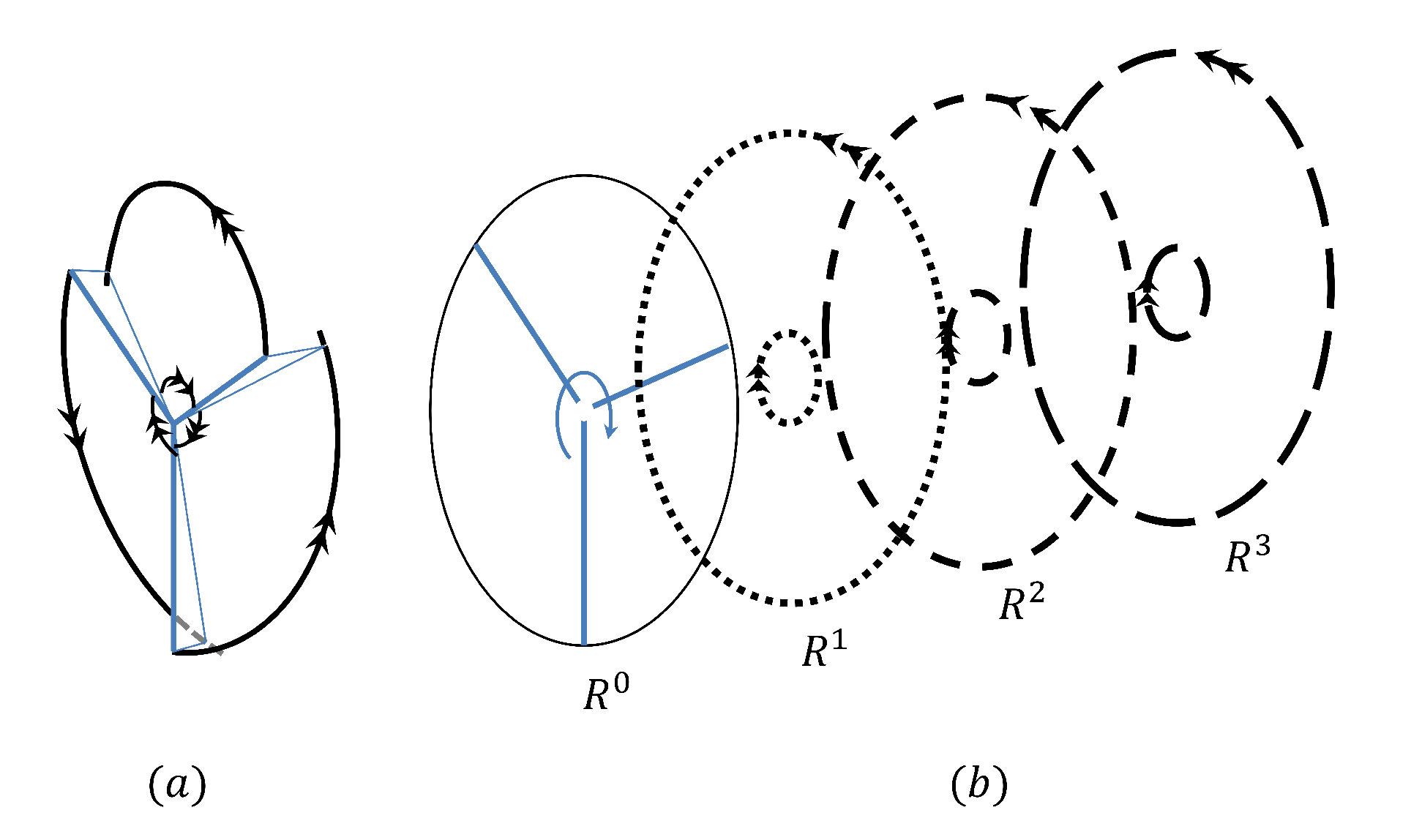
3.2. Far Wake Model
The Propagation of Vortex Ring
- Identify the control points on the vortex rings and calculate the velocities (induced velocity and free stream velocity) on all the control points.
- Calculate the position of the control points both on the rotor and in the wake. The control points in the wake is given by Euler’s equation assuming an incompressible and inviscid fluid, aswhere V is the speed of a control point in the global coordinate system.
- Update the position of the vortex rings based on the control points determined in step 2.
3.3. Characteristics of the First Rings Shed in the Wake
3.4. Strength of the Blade Bound Vortex
3.4.1. Kutta–Joukowski Lift Theorem
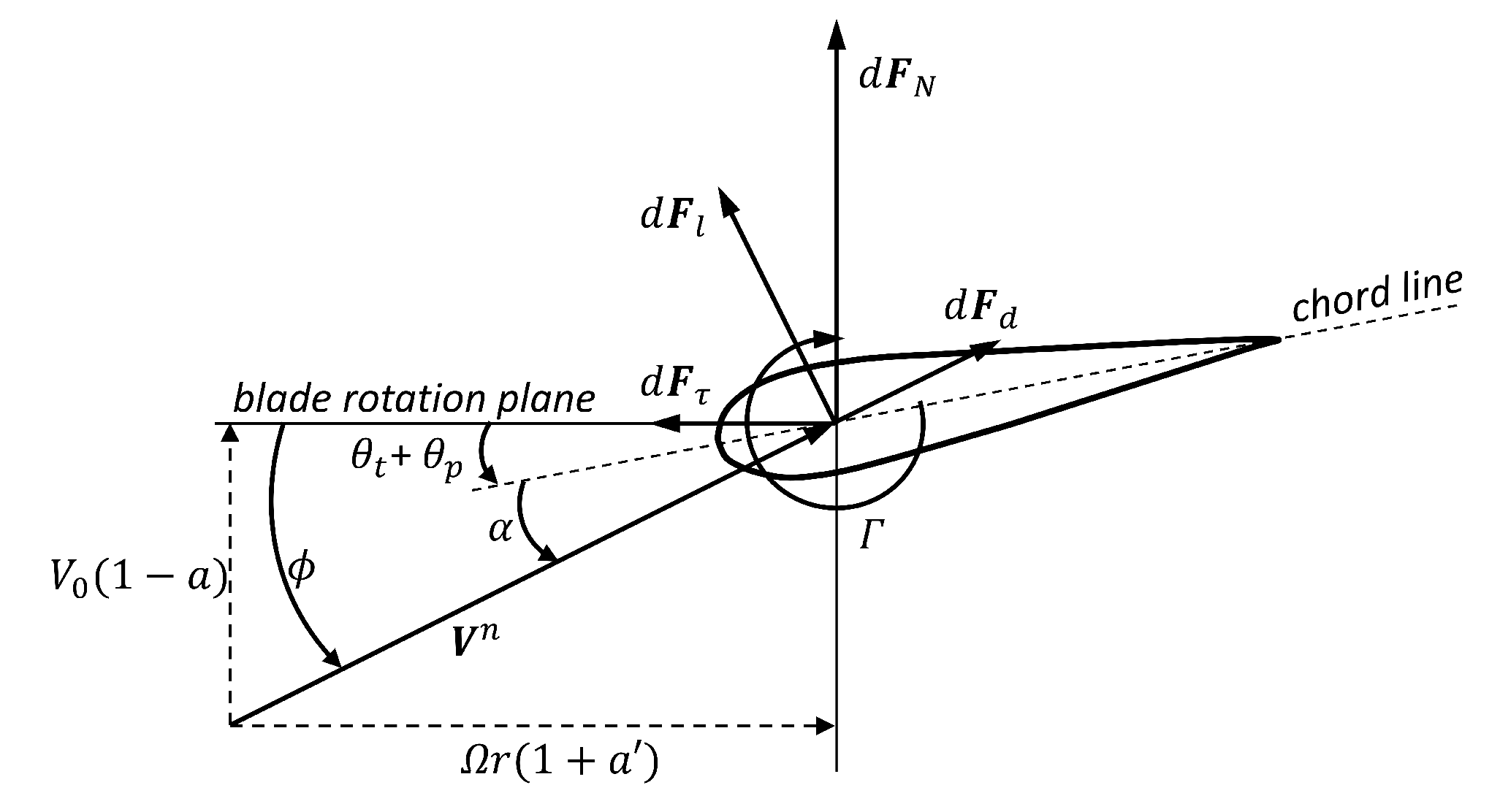
3.4.2. Blade Element Force
4. Simulation Description
5. Results
5.1. Bottom-Mounted Wind Turbine
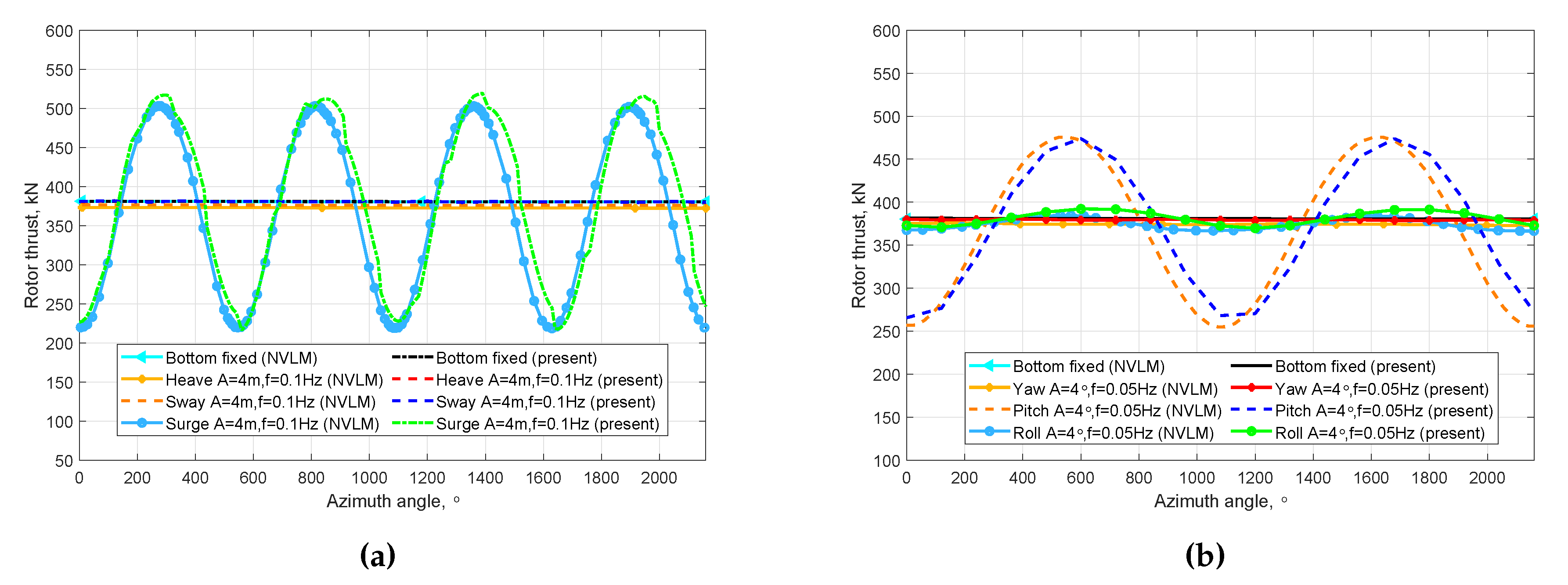
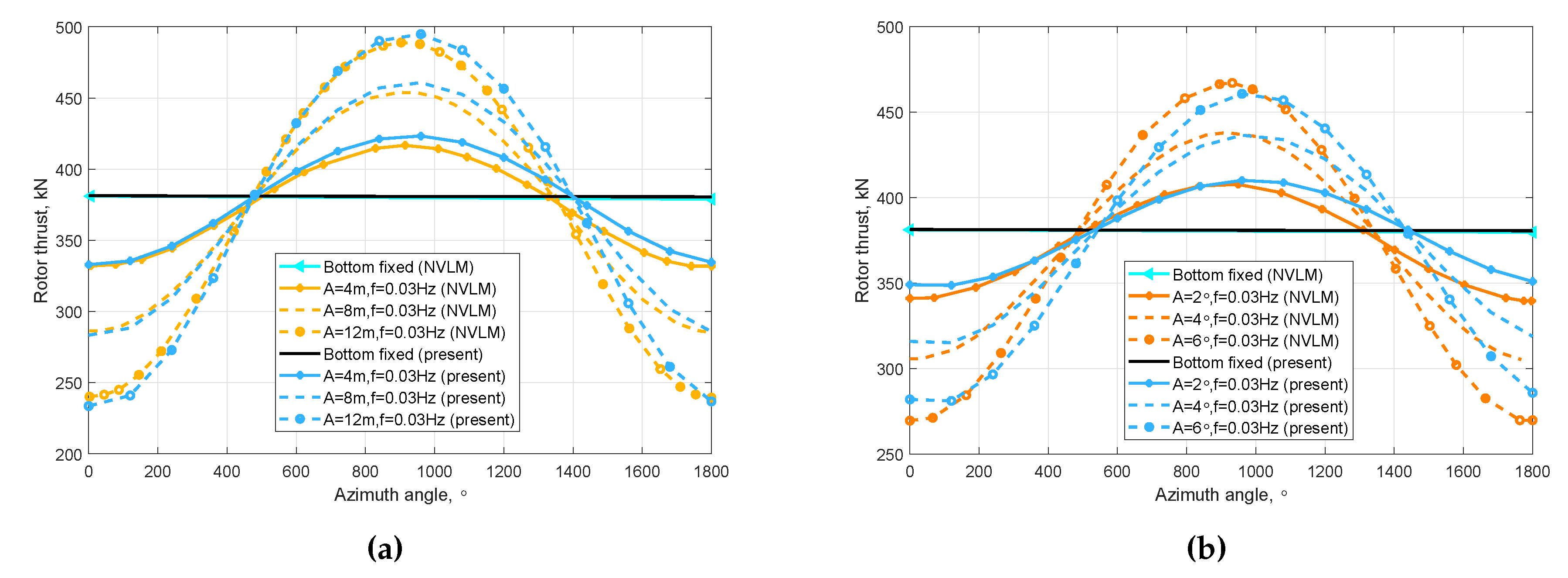
5.2. Floating Wind Turbine under Single-DoF Motion
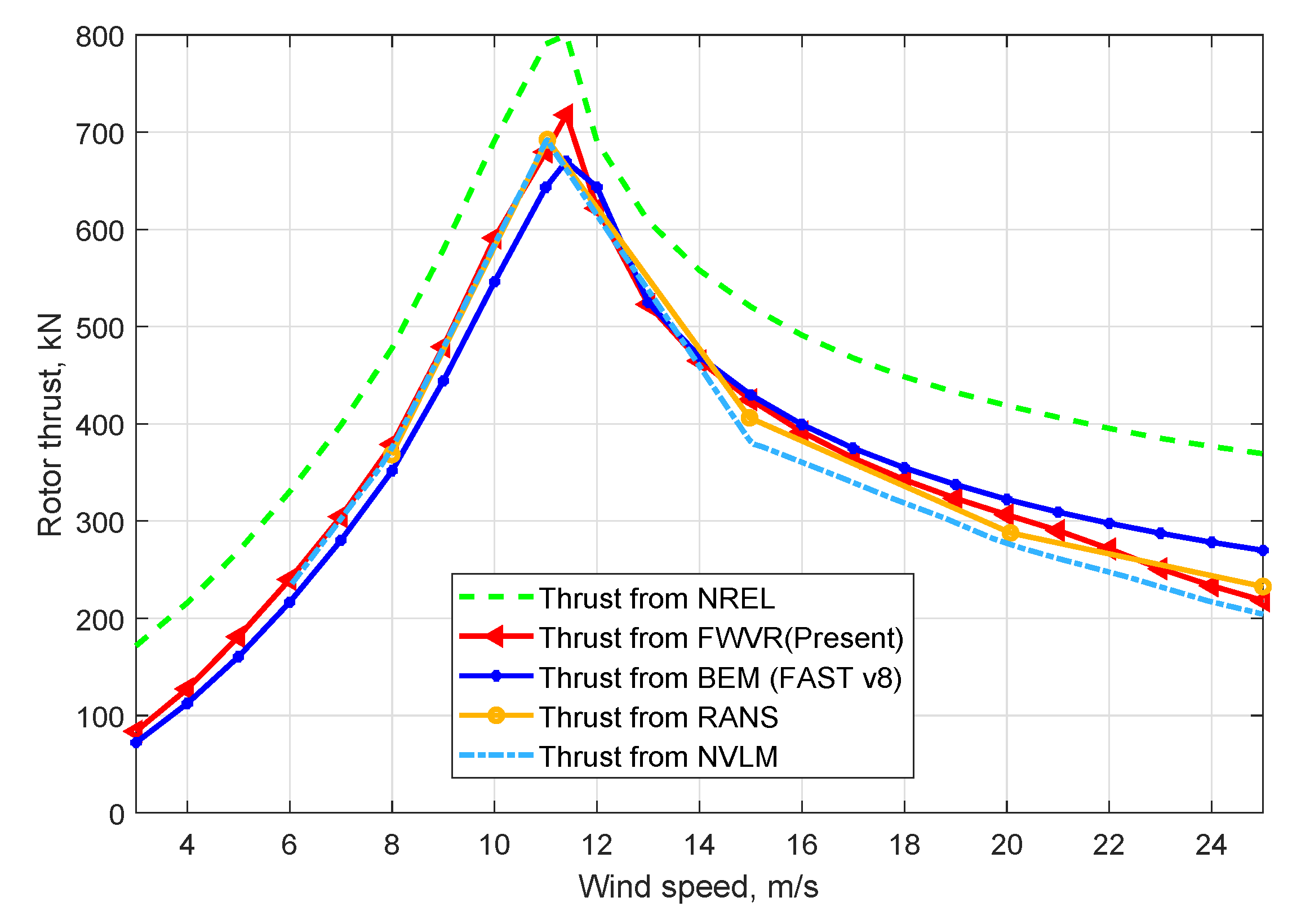
5.2.1. Thrusts Comparison with Lee
5.2.2. Angle of Attacks Comparison with Sebastian and de Vaal
- below-rated: = 6.0 m/s, = 9.63, = 1.83 m, = 12.72 s;
- rated: = 11.4 m/s, = 7.00, = 2.54 m, = 13.35 s; and
- above-rated: = 18.0 m/s, = 4.43, = 4.09 m, = 15.33 s, = 15°
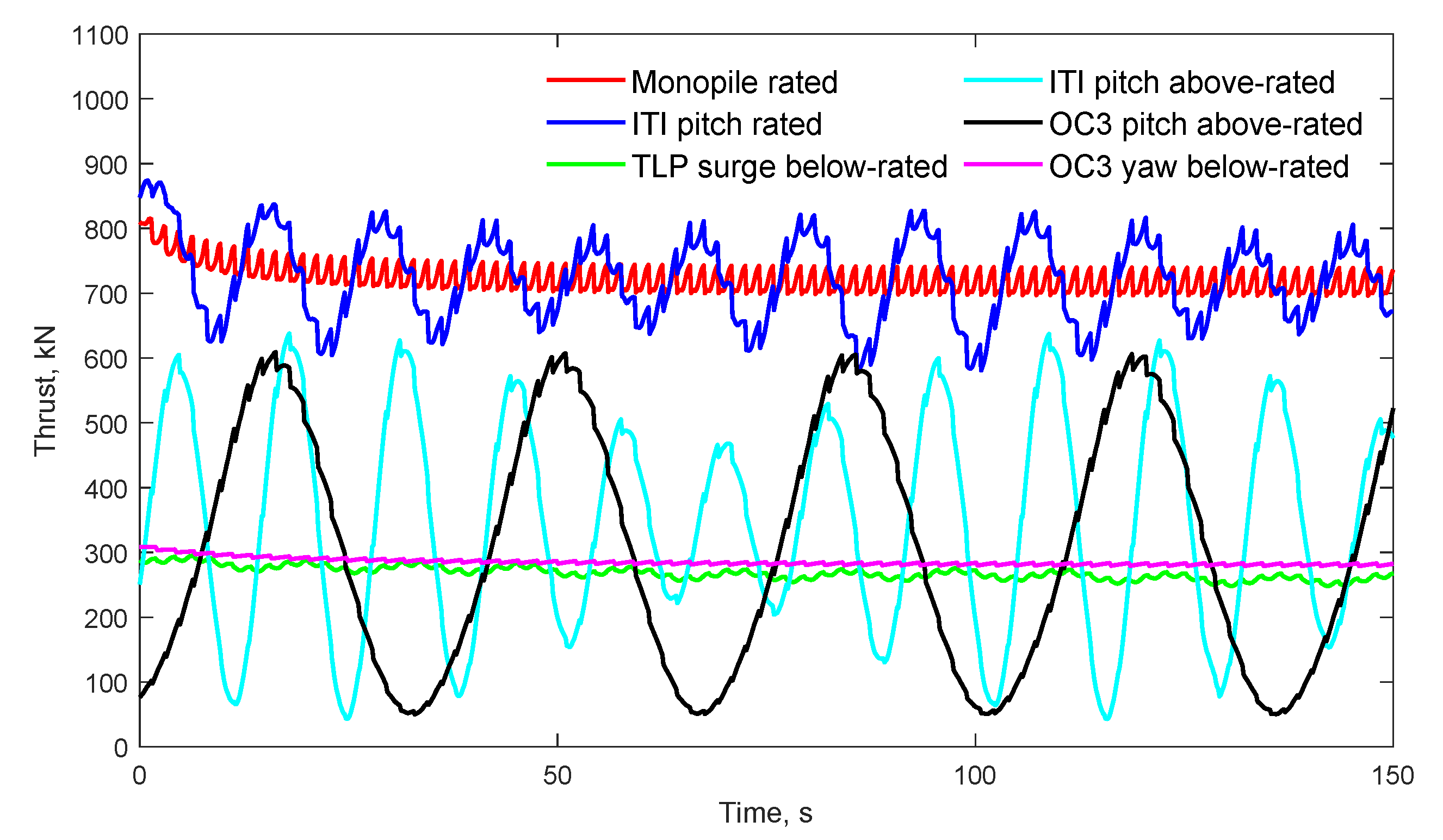
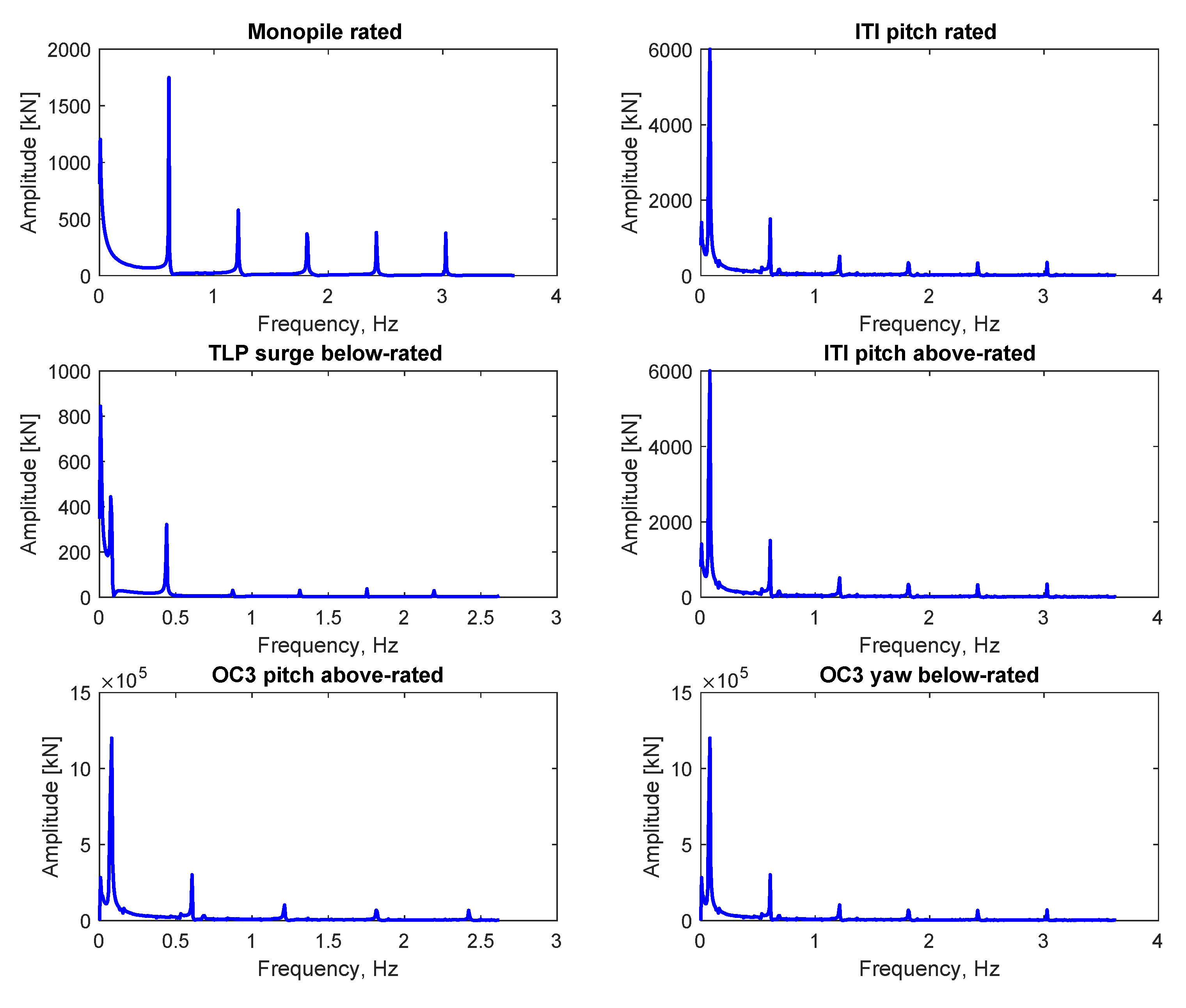
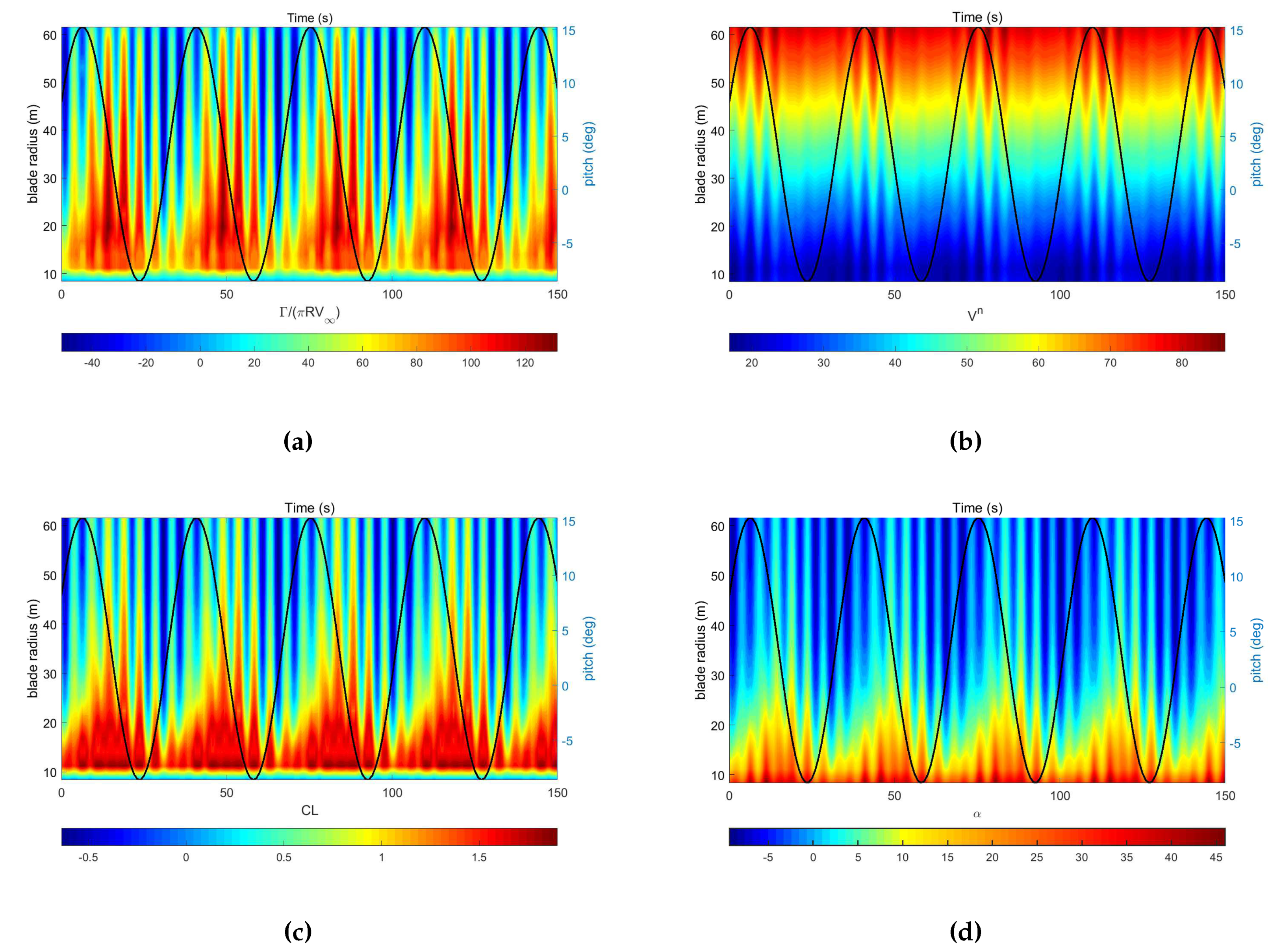
5.2.3. Thrust Analysis in Time Domain and Frequency Domain
5.3. Floating Wind Turbine under Multiple-DoF Motion
- Below-rated: The ITI Energy barge with platform surge, heave, and pitch.
- Below-rated: The OC3-Hywind spar-buoy with platform pitch and yaw.
- Above-rated: The OC3-Hywind spar-buoy with platform pitch and yaw.
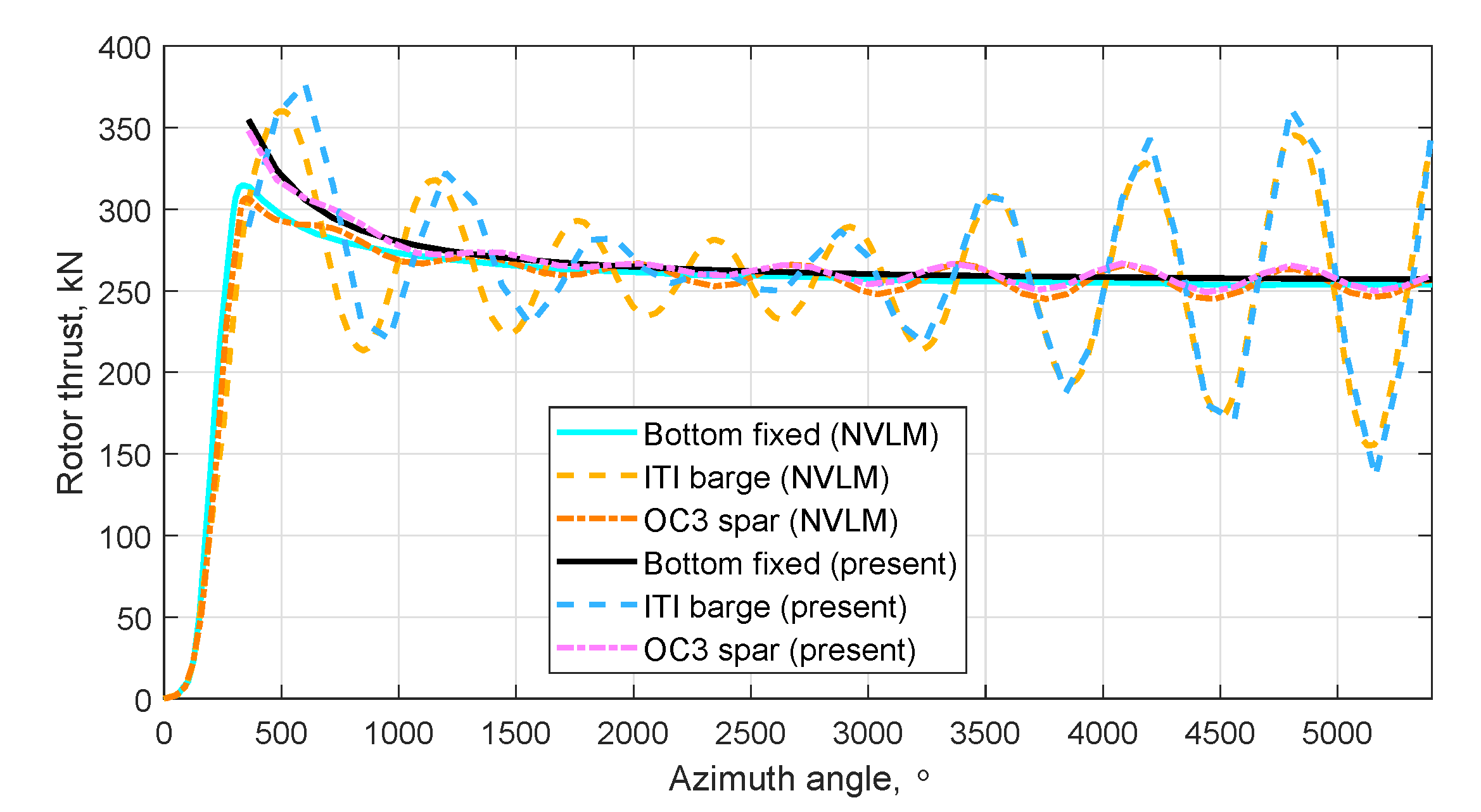
5.3.1. The Multiple-DoF Motion Thrusts Comparison with Lee
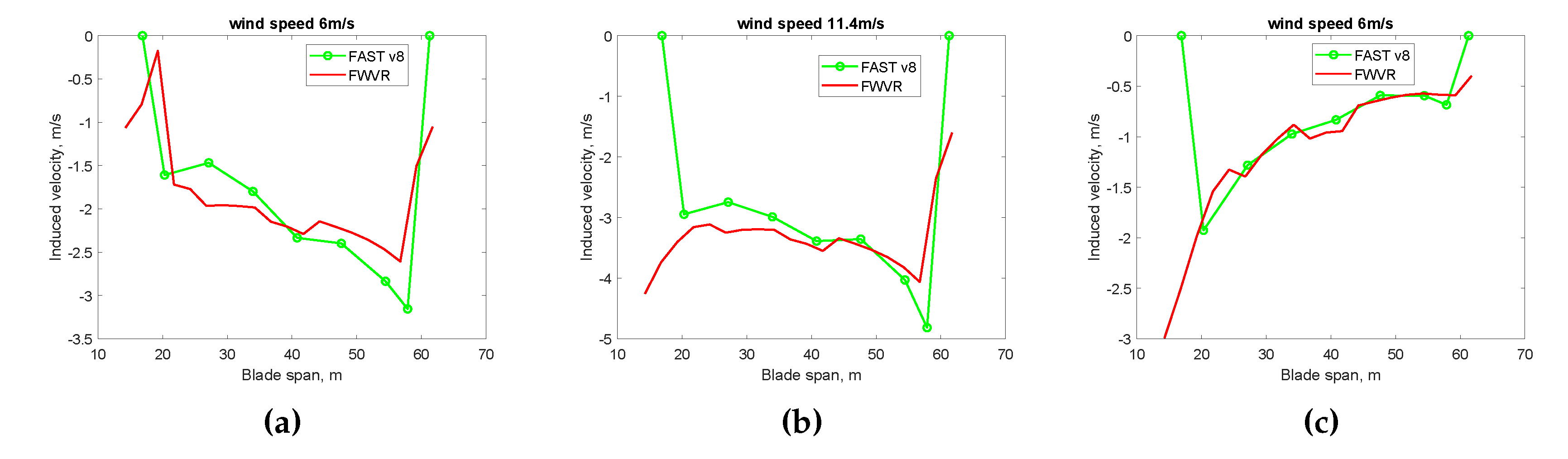
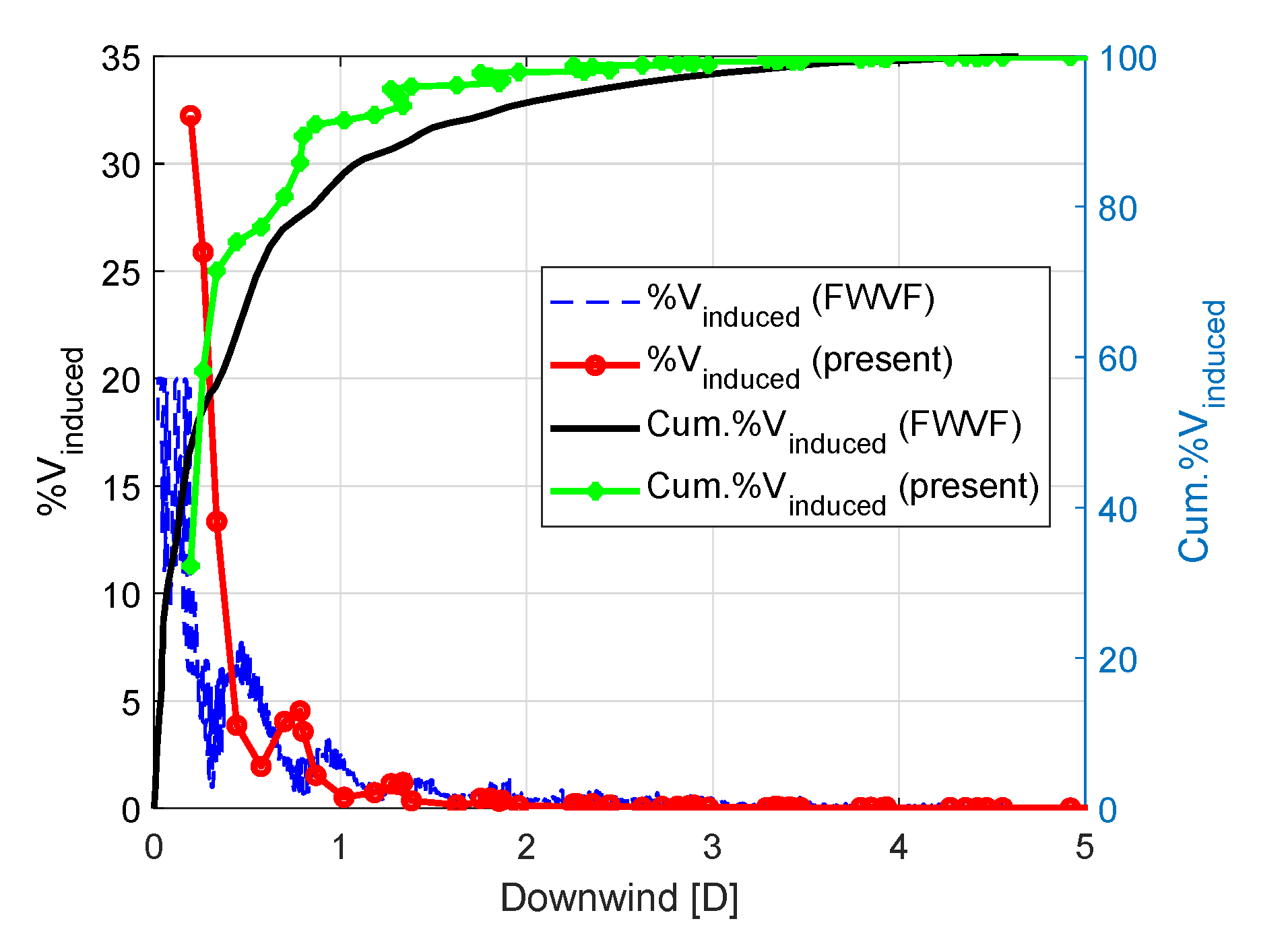
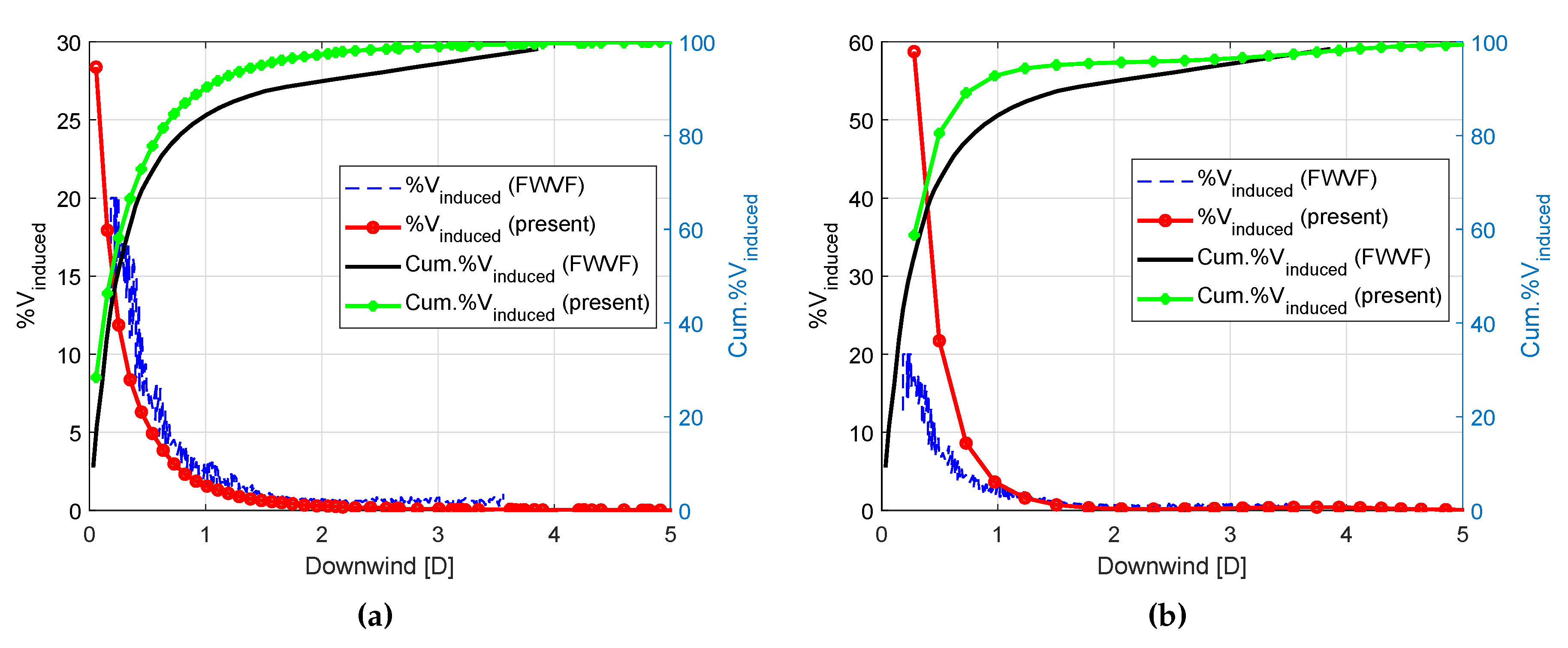
5.3.2. Induced Velocity Comparison with Sebastian
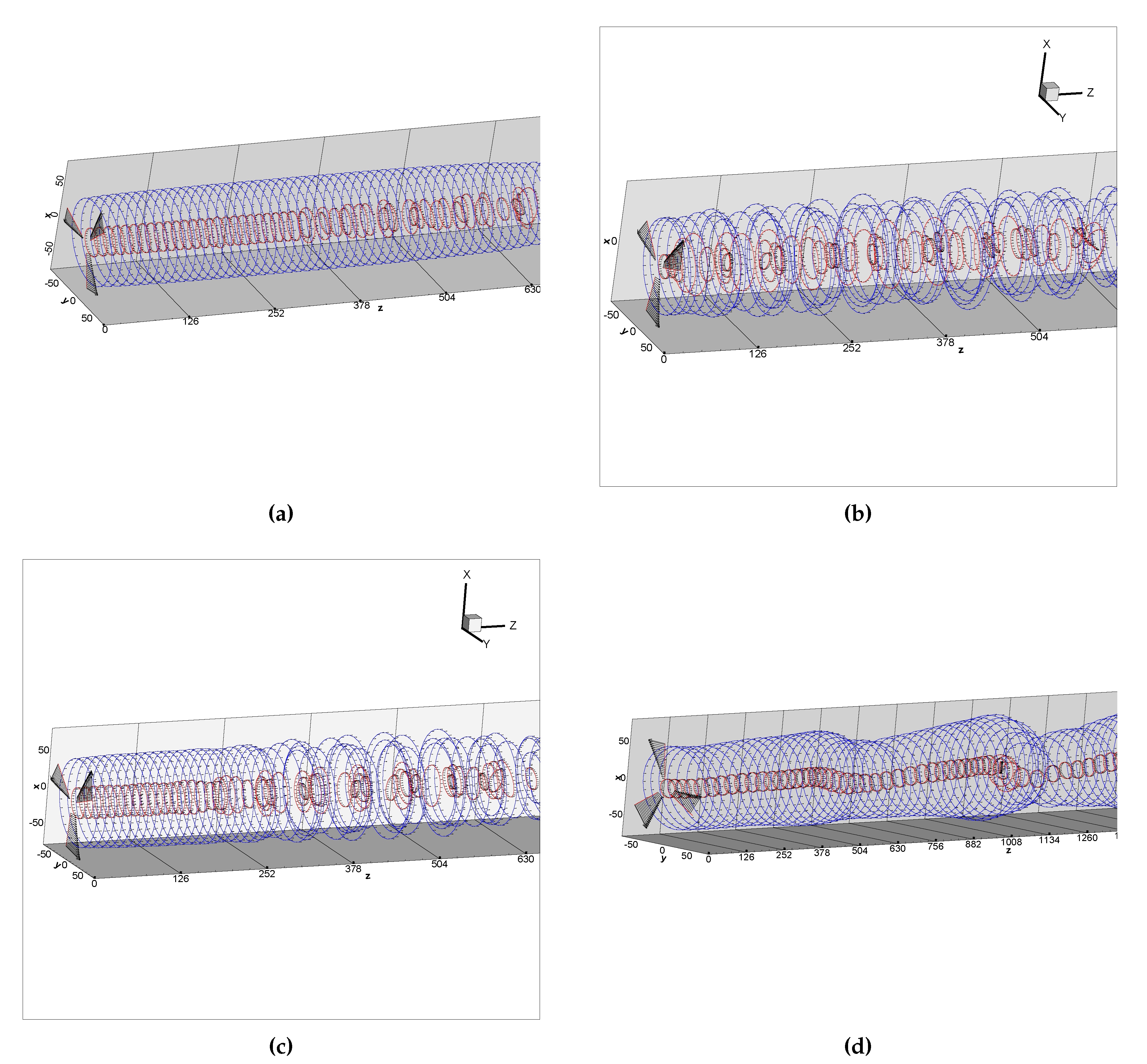
5.3.3. Wake structure discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| FOWT | Floating Offshore Wind Turbines |
| BEM | Blade Element Momentum Theory |
| CFD | Computational Fluid Dynamics |
| NREL | National Renewable Energy Laboratory |
| FWVF | Free Wake Vortex Filament Method |
| NVLM | Nonlinear Vortex Lattice Method |
| FWVR | Free Wake Vortex Ring Method |
| CO3 | Code Comparison Collaboration |
| OHS | OC3-Hywind Spar-Buoy |
| TLP | Tension Leg Platform |
| RANS | Reynolds-averaged Navier–Stokes Method |
| AFWRV | Actuator Disc with Free Wake Vortex Ring Model |
References
- Sebastian, T.; Lackner, M. Characterization of the unsteady aerodynamics of offshore floating wind turbines. Wind Energy 2013, 16, 339–352. [Google Scholar] [CrossRef]
- Emmanuel, B. Wind Turbine Aerodynamics and Vorticity-Based Methods, Fundamentals and Recent Applications; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Bhagwat, M.; Leishman, J. Transient Rotor Inflow Using a Time-Accurate Free-Vortex Wake Model. In Proceedings of the AIAA, Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2001. [Google Scholar] [CrossRef]
- Gohard, J.C. Free Wake Analysis of Wind Turbine Aerodynamics; Technical Report; MIT: Cambridge, MA, USA, 1978. [Google Scholar]
- Sebastian, T.; Lackner, M. Analysis of the Induction and Wake Evolution of an Offshore Floating Wind Turbine. Energies 2012, 5, 968–1000. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Lee, D.J. Effects of platform motions on aerodynamic performance and unsteady wake evolution of a floating offshore wind turbine. Renew. Energy 2019, 143, 9–23. [Google Scholar] [CrossRef]
- Newman, S. The Induced Velocity of a Vortex Ring Filament; AFM Technical Reports 11/03; University of Southampton, School of Engineering Sciences: Southampton, UK, 2011. [Google Scholar]
- Yoon, S.; Heister, S. Analytical formulas for the velocity field induced by an infinitely thin vortex ring. Int. J. Numer. Methods Fluids 2004, 44, 665–672. [Google Scholar] [CrossRef]
- Øye, S. A simple vortex model. In Proceedings of the Third IEA Symposium on the Aerodynamics of Wind Turbines, ETSU, Harwell, UK, 16–17 November 1989. [Google Scholar]
- De Vaal, J.; Hansen, M.; Moan, T. Validation of a vortex ring wake model suited for aeroelastic simulations of floating wind turbines. J. Phys. Conf. Ser. 2014, 555, 012025. [Google Scholar] [CrossRef]
- Yu, W.; Ferreira, C.S.; van Kuik, G.; Baldacchino, D. Verifying the Blade Element Momentum Method in unsteady, radially varied, axisymmetric loading using a vortex ring model. Wind Energy 2017, 20, 269–288. [Google Scholar] [CrossRef]
- Miller, R. Simplified Free Wake Analysis for Rotors; Technical Report; Aeronautical Research Inst.: Stockholm, Sweden; National Aeronautics and Space Administration: Washington, DC, USA, 1982.
- Afjeh, A. Wake Effects on the Aerodynamic Performance of Horizontal Axis Wind Turbines; NASA STI/Recon Technical Report N; NASA STI: Hampton, VA, USA, 1984.
- De Vaal, J.; Hansen, M.; Moan, T. Influence of Rigid Body Motions on Rotor Induced Velocities and Aerodynamic Loads of a Floating Horizontal Axis Wind Turbine. In Proceedings of the ASME, International Conference on Offshore Mechanics and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar] [CrossRef]
- De Vaal, J. Aerodynamic Modelling of Floating Wind Turbines. Ph.D. Thesis, NTNU, Trondheim, Norway, 2015. [Google Scholar]
- Sørensen, N.; Johansen, J. UPWIND, Aerodynamics and Aero-elasticity Rotor Aerodynamics in Atmospheric Shear Flow; Invited Presentation. Published at the Web.; European Wind Energy Conference & Exhibition, EWEC: Copenhagen, Denmark, 2007. [Google Scholar]
- Leonard, A. Computing Three-Dimensional Incompressible Flows with Vortex Elements. Annu. Rev. Fluid Mech. 1985, 17, 523–559. [Google Scholar] [CrossRef]
- Van Hoydonck, W.; Gerritsma, M.; van Tooren, M. On Core and Curvature Corrections used in Straight-Line Vortex Filament Methods. J. Am. Helicopter Soc. arXiv 2012, arXiv:1204.2699. [Google Scholar]
- Betz, A. Behavior of Vortex Systems; Technical Reports NACA-TM-713; National Advisory Committee for Aeronautics: Washington, DC, USA, 1993.
- Phillips, W.F.; Snyder, D. Modern Adaptation of Prandtl’s Classic Lifting-Line Theory. J. Aircr. 2000, 34, 622–670. [Google Scholar] [CrossRef]
- Van Garrel, A. Requirements for a Wind Turbine Aerodynamics Simulations Module—Version 1; ECN-C-01-099; Energy Research Centre of The Netherlands (ECN): Petten, The Netherlands, 2001. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Computational Time | Modeling Capability |
|---|---|---|
| BEM | Rotor aerodynamics without wake | |
| AFWVR | Rotor aerodynamics, uncoupled wake aerodynamics | |
| FWVR | Coupled rotor aerodynamics and wake aerodynamics | |
| FWVF | Coupled rotor aerodynamics and wake aerodynamics | |
| NVLM | Coupled rotor aerodynamics and wake aerodynamics |
| Motion | Amplitude A [m or °] | Frequency f [Hz] |
|---|---|---|
| Translation (surge, sway, heave) | 4 | 0.1 |
| Rotation (roll, pitch, yaw) | 4 | 0.05 |
| surge | 4,8,12 | 0.03 |
| pitch | 2,4,6 | 0.03 |
| Oper. | Platf. | Mode | |||||||
|---|---|---|---|---|---|---|---|---|---|
| [m]/[°] | [m]/[°] | [Hz] | [rad] | [m]/[°] | [m]/[°] | [rad] | |||
| 1 | ITI | surge | 13.602 | 0.725 | 0.007 | −1.163 | −0.442 | 0.078 | 2.609 |
| 1 | ITI | heave | −0.130 | 0.318 | 0.078 | 1.303 | 0.254 | 0.108 | 2.702 |
| 1 | ITI | pitch | 0.591 | 1.475 | 0.078 | −0.066 | 1.630 | 0.083 | 1.816 |
| 1 | OHS | pitch | 1.580 | −0.084 | 0.066 | 1.930 | −0.116 | 0.077 | 3.113 |
| 1 | OHS | yaw | −0.021 | 0.091 | 0.108 | 1.983 | −0.036 | 0.120 | 3.429 |
| 1 | TLP | surge | 1.206 | 0.436 | 0.016 | −0.831 | −0.222 | 0.077 | 3.018 |
| 2 | ITI | pitch | 1.722 | −0.637 | 0.065 | −0.381 | 1.677 | 0.077 | 1.835 |
| 3 | ITI | pitch | 0.939 | 1.518 | 0.066 | 2.132 | 2.979 | 0.078 | 6.863 |
| 3 | OHS | pitch | 3.324 | 11.961 | 0.029 | 0.420 | 0.000 | 0.000 | 0.000 |
| 3 | OHS | yaw | −0.222 | 2.000 | 0.029 | −0.359 | 3.185 | 0.058 | 3.385 |
| Operation | Platform | Mode | WInDS [5] | FWVR1 [14] | FWVR2, tilt = 0° | FWVR2, tilt = 5° | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| [°] | [°] | [°] | [°] | [°] | [°] | [°] | [°] | |||
| 1 | Monopile | – | 3.95 | 0.23 | 3.86 | 0.48 | 3.82 | 0.15 | 3.71 | 3.23 |
| 1 | ITI | surge | 3.95 | 0.40 | 3.87 | 0.53 | 3.78 | 0.23 | 3.64 | 3.23 |
| 1 | ITI | pitch | 3.99 | 2.21 | 3.90 | 1.5 | 3.89 | 1.92 | 3.84 | 3.85 |
| 1 | OHS | pitch | 3.94 | 0.32 | 3.84 | 0.49 | 3.66 | 0.25 | 3.84 | 3.21 |
| 1 | TLP | surge | 3.95 | 0.27 | 3.86 | 0.49 | 3.64 | 0.23 | 3.70 | 3.23 |
| 2 | Monopile | – | 6.76 | 0.37 | 6.66 | 0.69 | 5.84 | 0.35 | 5.76 | 3.35 |
| 2 | ITI | pitch | 6.78 | 1.67 | 6.67 | 1.30 | 5.82 | 1.09 | 5.73 | 3.47 |
| 3 | Monopile | – | −0.10 | 0.80 | −0.31 | 2.24 | −0.59 | 0.05 | −0.61 | 2.91 |
| 3 | ITI | pitch | −0.08 | 2.26 | −0.28 | 2.88 | −0.59 | 1.87 | −0.61 | 3.39 |
| 3 | OHS | pitch | −0.45 | 3.59 | −0.52 | 3.09 | −0.83 | 2.40 | −0.85 | 3.57 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, J.; Viré, A.; Ferreira, C.S.; Li, Z.; van Bussel, G. A Modified Free Wake Vortex Ring Method for Horizontal-Axis Wind Turbines. Energies 2019, 12, 3900. https://doi.org/10.3390/en12203900
Dong J, Viré A, Ferreira CS, Li Z, van Bussel G. A Modified Free Wake Vortex Ring Method for Horizontal-Axis Wind Turbines. Energies. 2019; 12(20):3900. https://doi.org/10.3390/en12203900
Chicago/Turabian StyleDong, Jing, Axelle Viré, Carlos Simao Ferreira, Zhangrui Li, and Gerard van Bussel. 2019. "A Modified Free Wake Vortex Ring Method for Horizontal-Axis Wind Turbines" Energies 12, no. 20: 3900. https://doi.org/10.3390/en12203900
APA StyleDong, J., Viré, A., Ferreira, C. S., Li, Z., & van Bussel, G. (2019). A Modified Free Wake Vortex Ring Method for Horizontal-Axis Wind Turbines. Energies, 12(20), 3900. https://doi.org/10.3390/en12203900