A Doubly-Fed Induction Generator Adaptive Control Strategy and Coordination Technology Compatible with Feeder Automation

Abstract
:1. Introduction
- ①
- This paper proposes a doubly-fed induction generator (DFIG) adaptive control strategy (ACS) which possesses the capabilities of dual-mode operation, restraining sudden changes of rotor current and distant synchronization, making seamless switching between grid-connection and island can be achieved and making distant synchronization possible without switching control strategies.
- ②
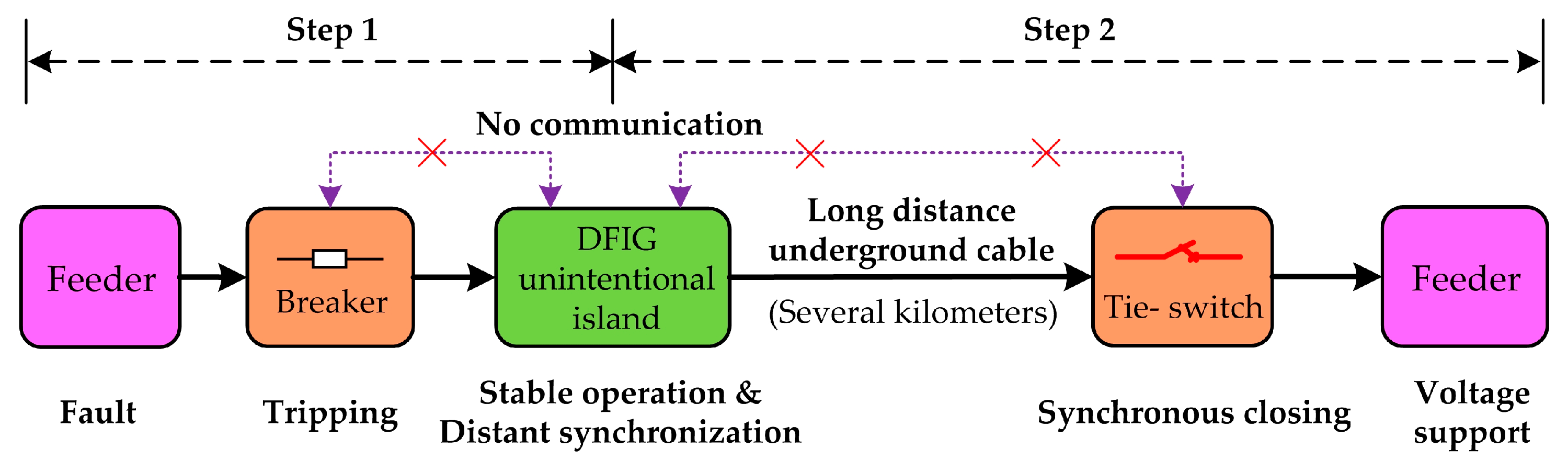
- This paper proposes a coordination technology which combines the DFIG islanding controlled by ACS with remote tie-switches based on local inspection of synchronization conditions for closing to achieve the safety grid-connection of DFIG islands in absence of communication between DFIG and DN.
- ③
- The ACS and coordination technology allows DFIG (not limited to a single wind turbine) continuously supply power to partial local loads during the dynamic process of feeder automation (FA) fault isolation and power recovery without shutdown and restart of DFIG, realizing the compatibility between DFIG and feeder automation (FA).
2. Contradictions in Active Distribution Network
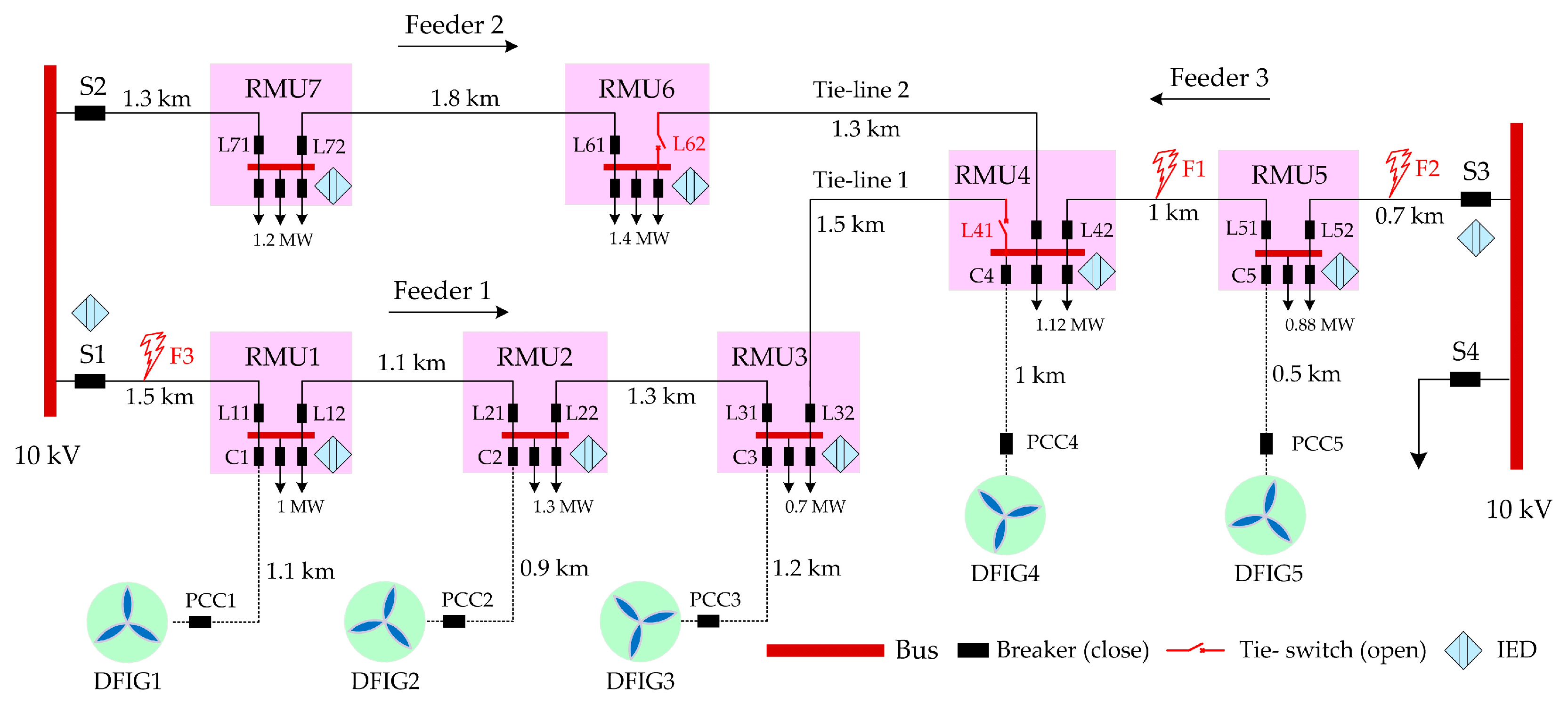
2.1. System under Study
2.2. FA Protection Logics
2.3. Contradictions between FA and DFIG
3. Solution for DN-DFIG Compatibility
4. The Proposed Adaptive Control Strategy and Coordination Technology
4.1. DFIG Adaptive Control Strategy
4.1.1. Grid-connection/island Dual-mode Operation
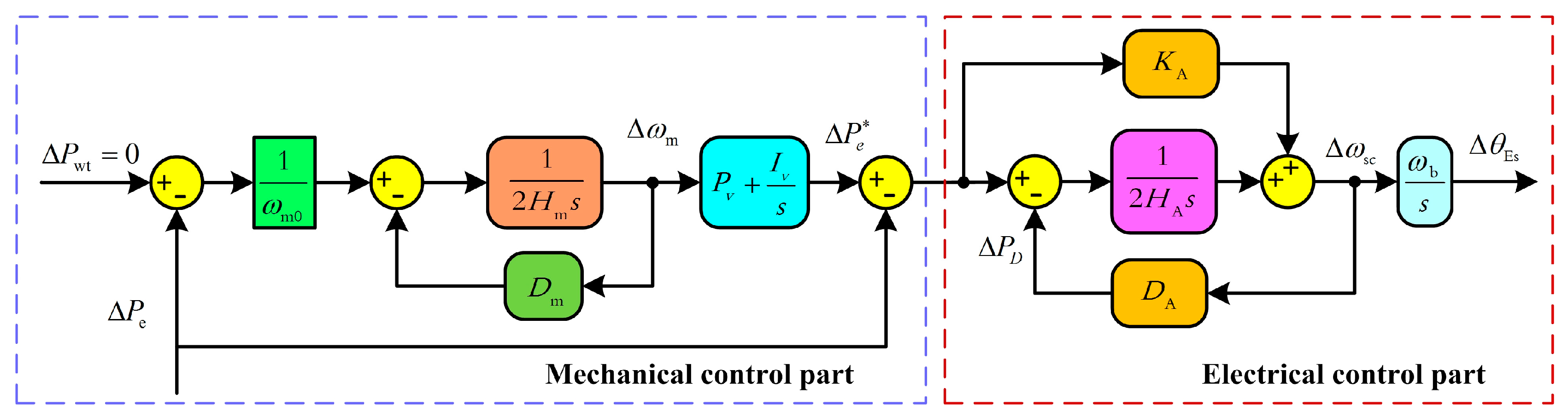
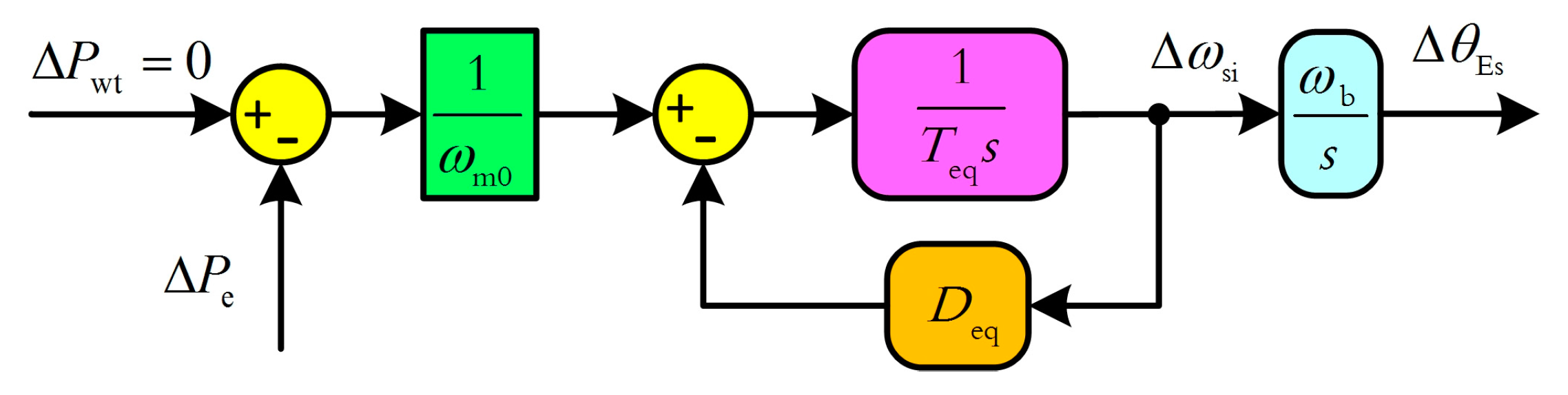
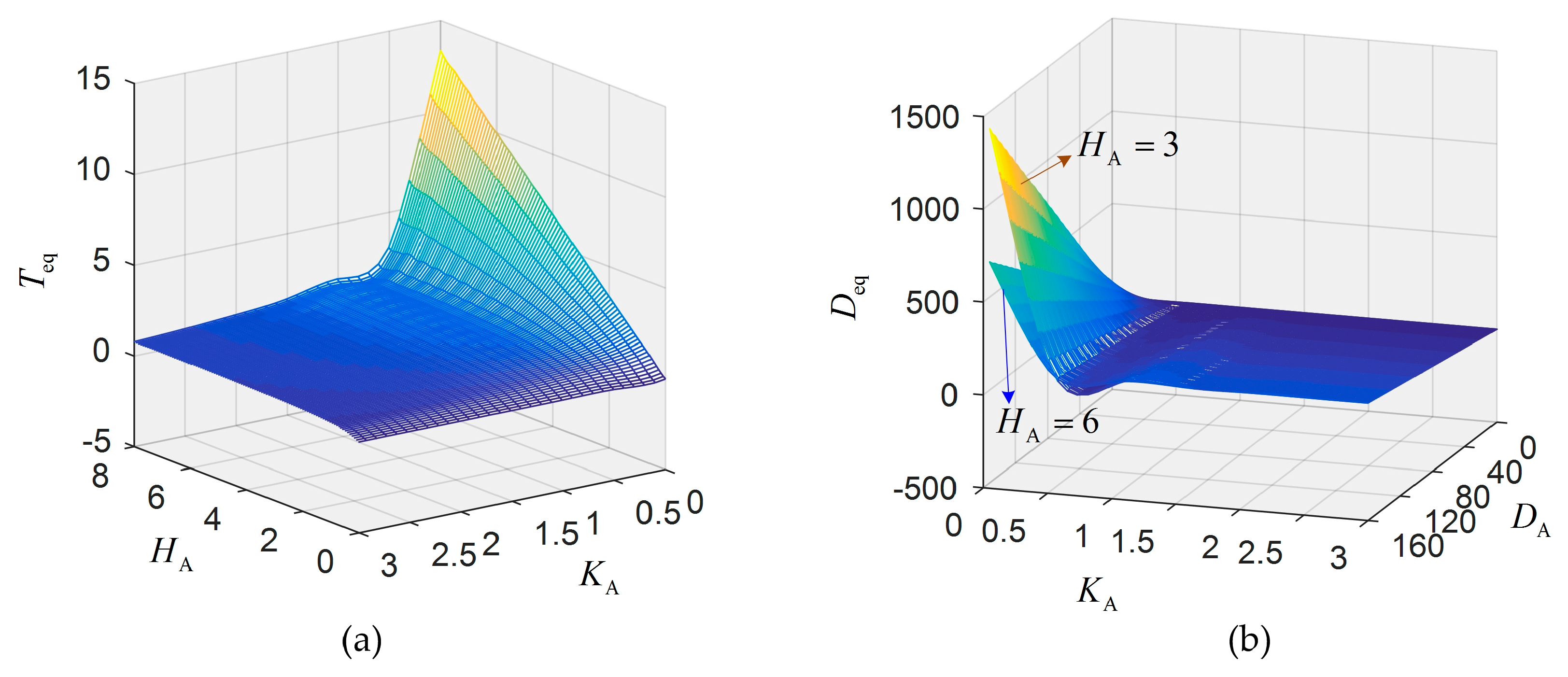
4.1.2. Equivalent Inertia/Damping Characteristics
4.1.3. Features of Current Inner Loop Control
4.1.4. Principles of Distant Synchronization
4.2. Coordination Technology
5. Case Analysis
5.1. Grid-connection Test
5.2. Tests under Different Fault Scenes
- ①
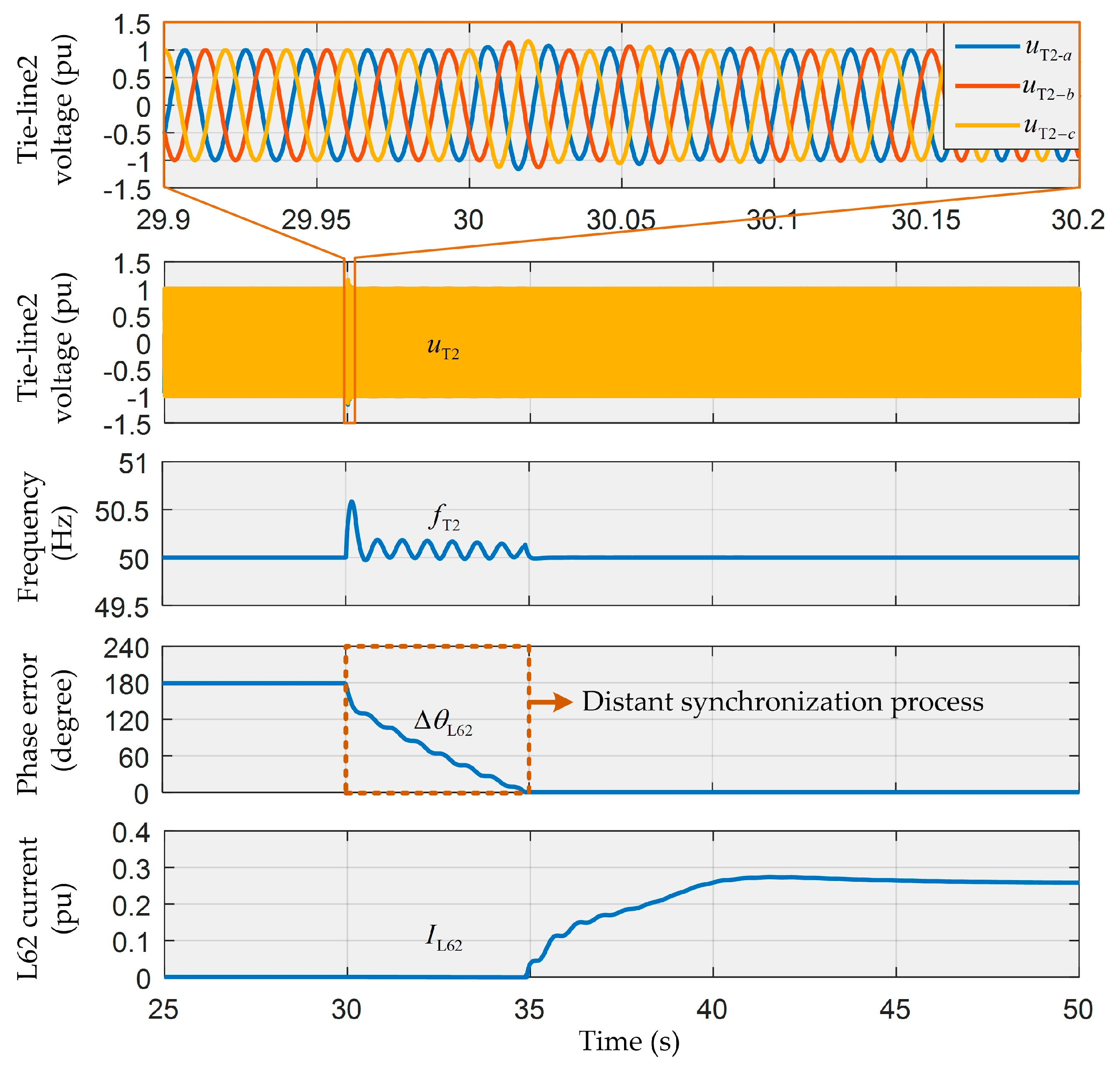
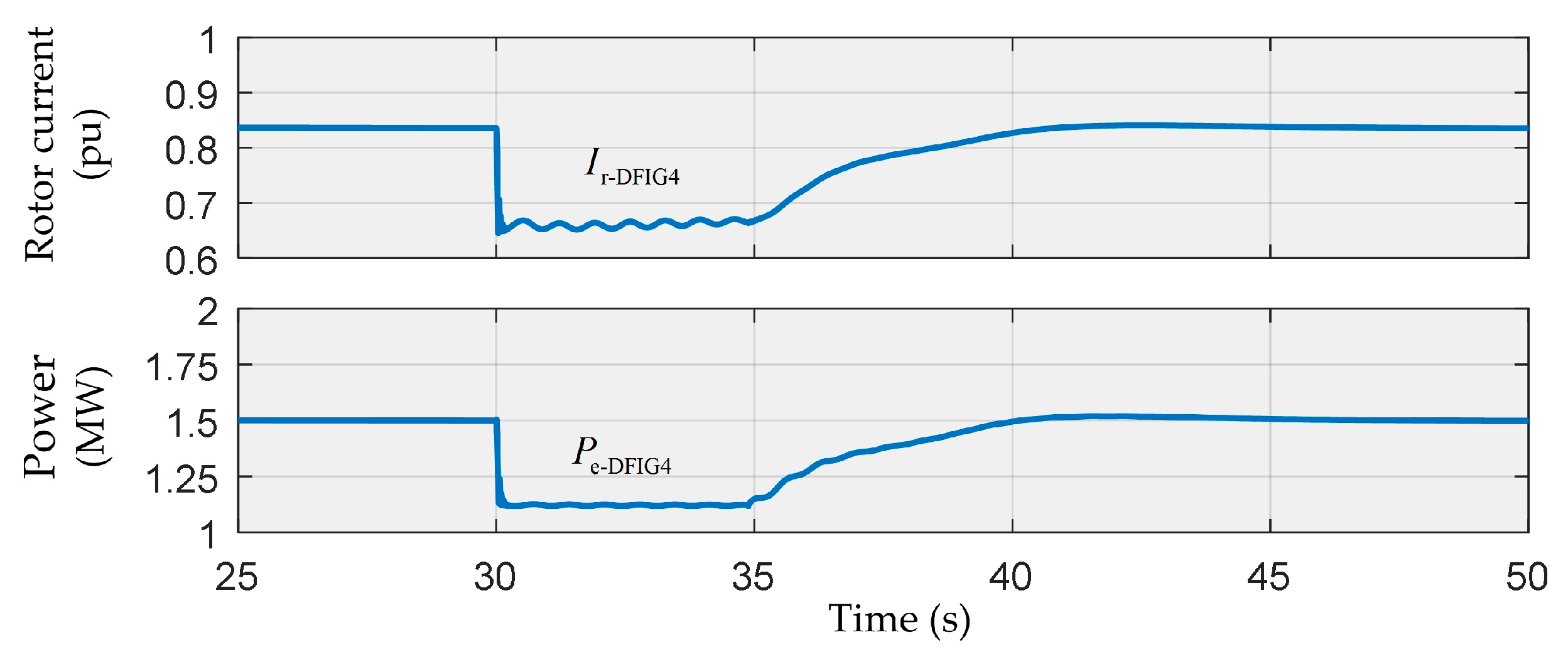
- Grid-connection/Island Switching: the power supply from feeder 3 is cut off at 30 s, DFIG4, RMU4, tie-line 2 and loads constitute single island. DFIG3 enters into the islanding mode under ACS control, while the voltage of the tie-line 2 jitters to 1.1 pu for within 1 cycle. No sudden change in phase is observed. However, mainly due to the sudden change of power (from 1.5 MW to 1.12 MW), the voltage frequency of tie-line 2 shows a peak of 50.6 Hz less than allowed (51 Hz); the rotor current amplitude of DFIG4, rapidly reduces from 0.8 pu to 0.65 pu without overcurrent; the electromagnetic power of DFIG4 also rapidly adapts to the island loads of 1.12 MW. It can be seen that the DFIG4 under ACS control can seamlessly enter into the single island mode.
- ②
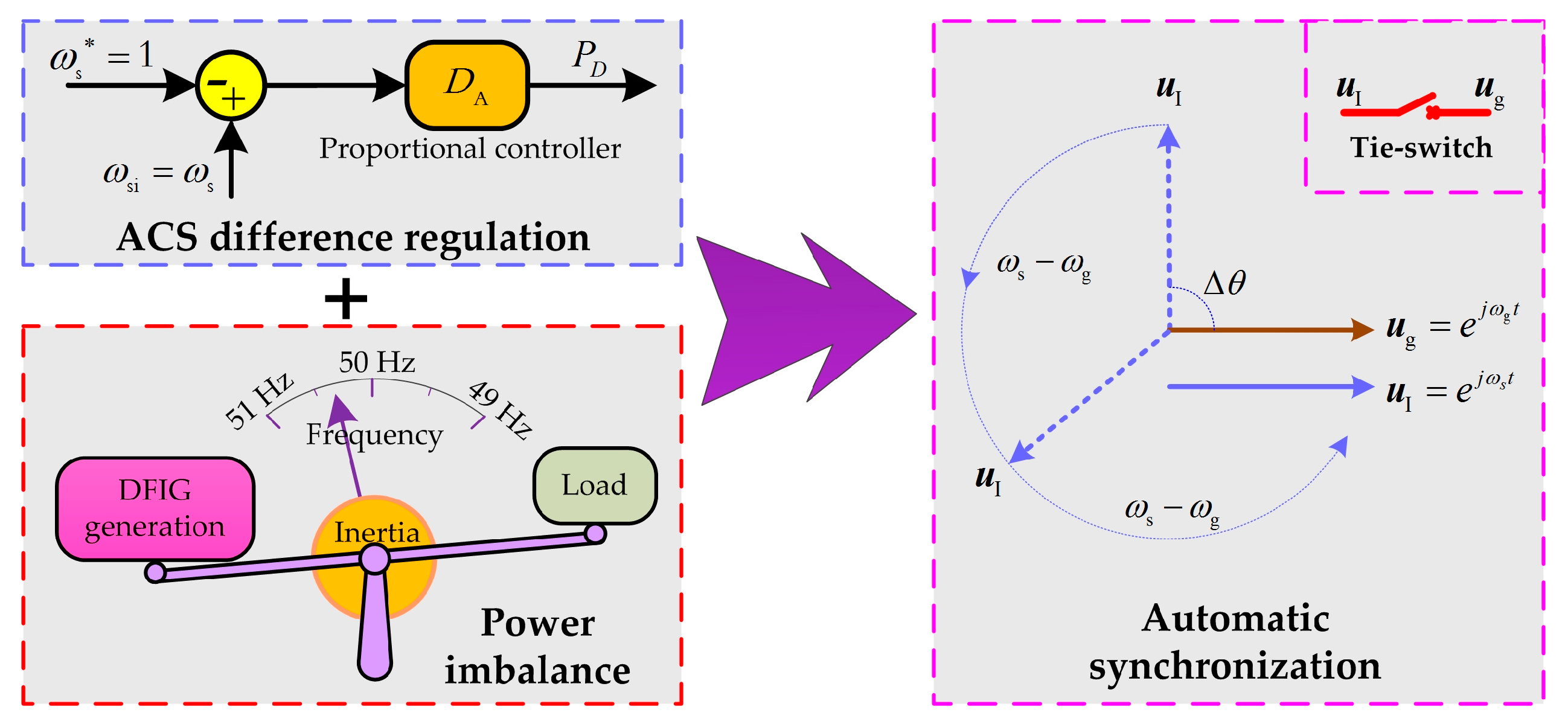
- Distant Synchronization Process: when the DFIG4 enters into the islanding mode with imbalanced power, the amplitude of remains relatively stable while fluctuates at a frequency of 1.5 Hz with a decreasing tendency; matches with the island loads of 1.12 MW without significant fluctuation basically; fluctuates around 50.1 Hz to cause the error of voltage phase between both sides of the tie-switch L62 reducing from 180° to 0°. It is obvious that the DFIG4 under ACS control can maintain the island stability and automatically create distant synchronization conditions.
- ③
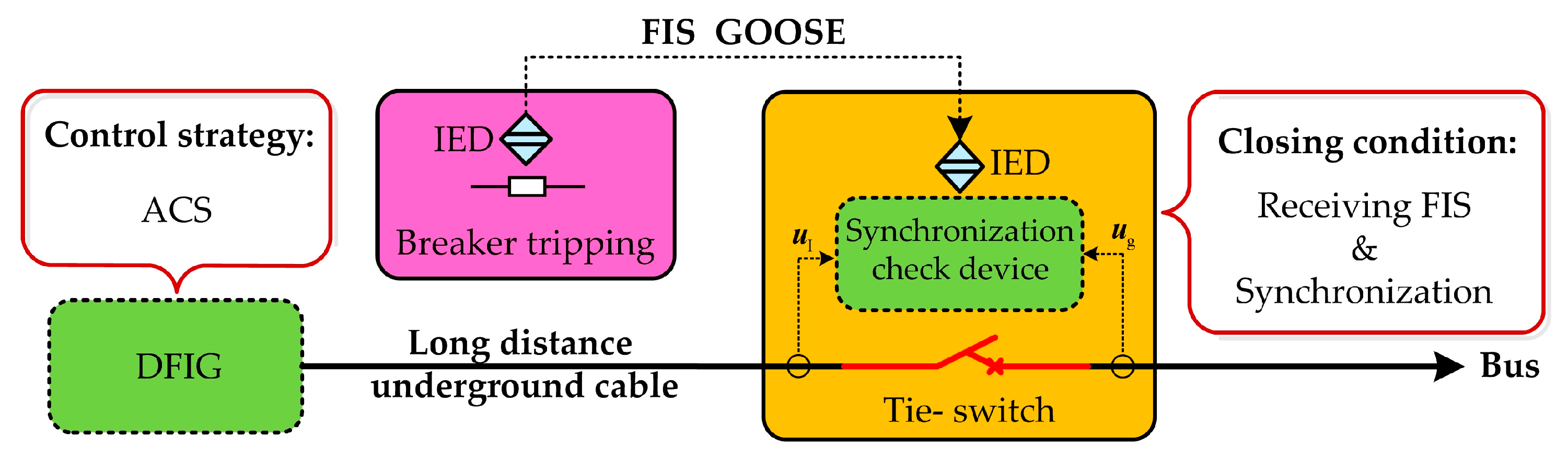
- Island Grid-connection Process: the tie-switch L62 receives the FIS GOOSE message through FA as the circuit breakers L42 and L51 trip. reduces to 0° at 34.9 s, and L62 immediately closes to passive feeder 2 as the synchronization conditions are inspected locally through the synchronization check device, when the DFIG4 turns to the grid-connection status, and and rise gradually, during which, no vibrant fluctuation is experienced. The stable status before fault is recovered in about 10 s. In the meantime, and remain constant as they are clamped down by the voltage of feeder 2 after grid-connection, and reserves 0°; Current amplitude of tie-switch L62 rises from 0pu after closing without dash current, and enters into a stable status about 10 s later. It is obvious that the DFIG4 island under ACS control can securely recover the grid-connection status through coordination with L62 for local synchronous closing.
- ①
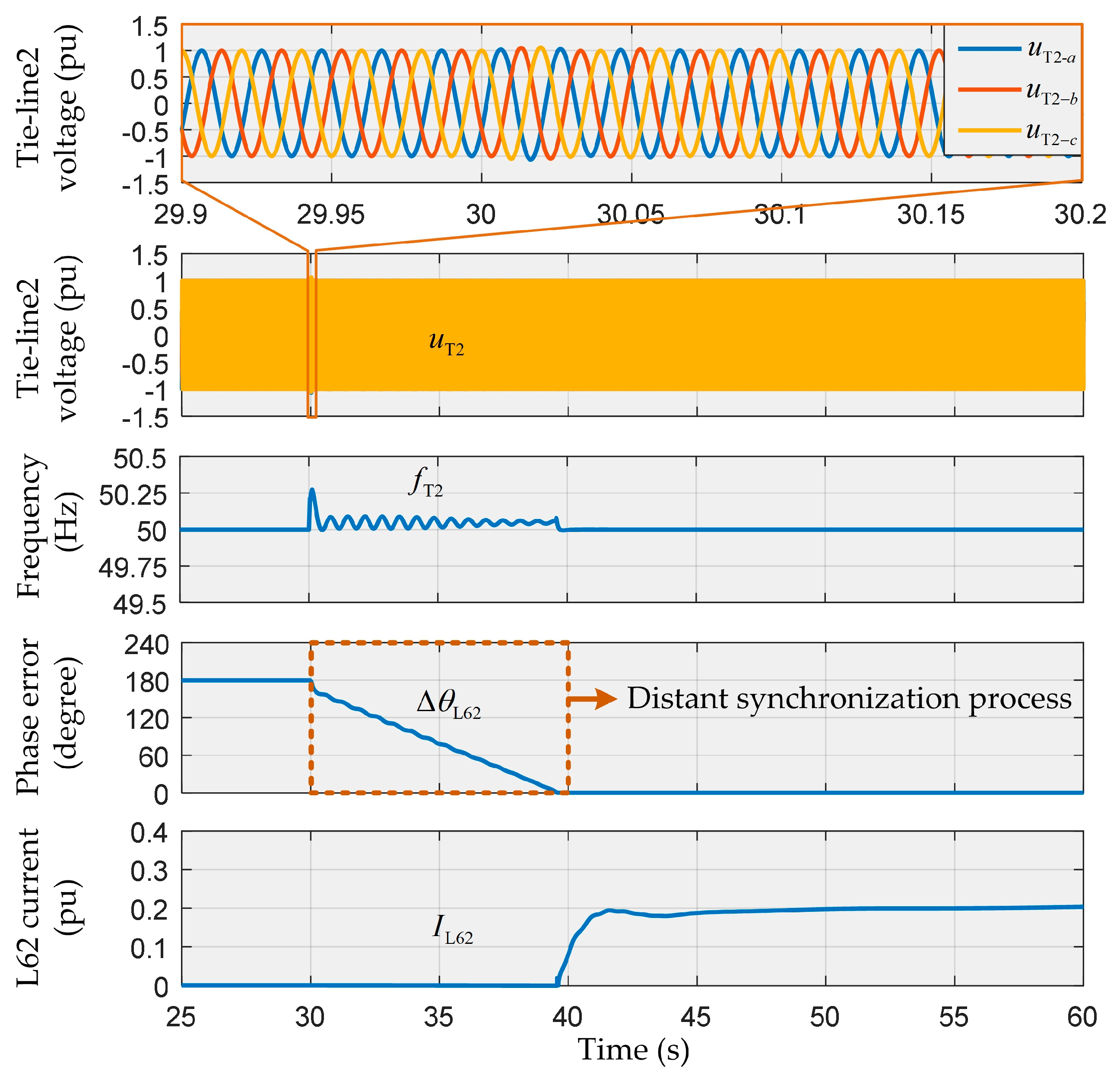
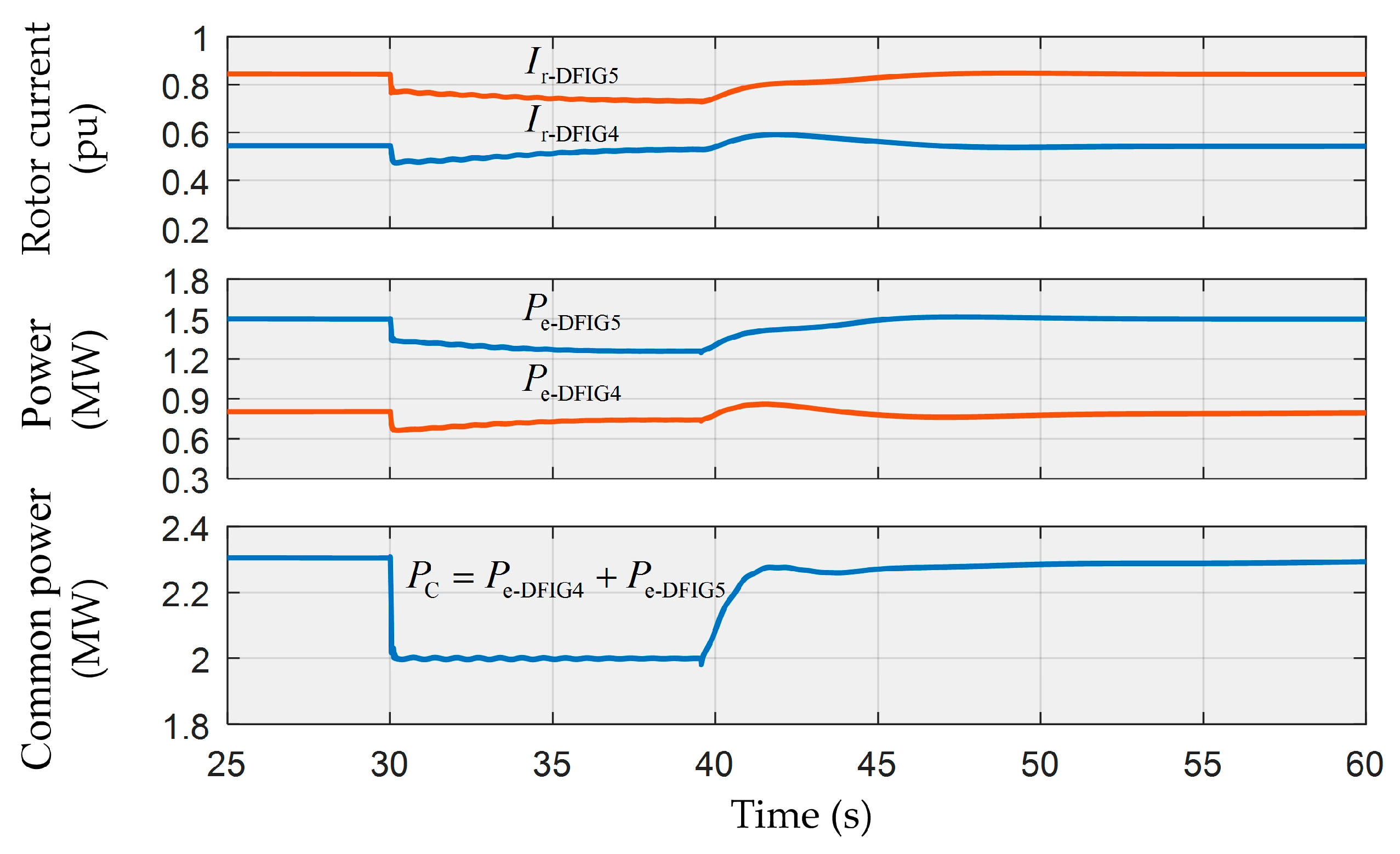
- Grid-connection/Island Switching: as L52 and S3 trip, DFIG4, DFIG5, RMU4 and RMU5, tie-line 2 and loads constitute an island with two wind turbines. DFIG4 and DFIG5 enter into the islanding mode under ACS control, while the voltage of the tie-line 2 jitters slightly with a continuous waveform. Similarly, mainly due to the sudden change of power (from 2.3 MW to 2 MW), the voltage frequency of tie-line 2 shows a peak of 50.26 Hz below allowable; the rotor current amplitudes of DFIG4 and DFIG5 ( and ) rapidly change without overcurrent; the total electromagnetic power of DFIG4 and DFIG5 () also rapidly adapts to the island loads of 2 MW. It can be seen that the DFIG4 and DFIG5 under ACS control can seamlessly enter into the multiple islands mode.
- ②
- Distant Synchronization Process: when the DFIG4 and DFIG5 enter into the islanding mode with imbalanced power, the amplitude of remains relatively stable while and ; DFIG4 and DFIG5 automatically allocate and to maintain at 2MW constantly; fluctuates around 50.05 Hz and its undulatory property gradually weakens to cause the error of voltage phase between both sides of the tie-switch L62 reducing to . It is obvious that the island with DFIG4 and DFIG5 under ACS control can automatically create distant synchronization conditions.
- ③
- Island Grid-connection Process: the tie-switch L62 receives the FIS GOOSE message through FA as the circuit breakers L52 and S3 trip. reduces to at 39.6 s, and L62 immediately closes to passive feeder 2 as DFIG4 and DFIG5 switch to grid-connection mode, and rise gradually. The pre-fault stable status is recovered in about 15 s for and (1.5 MW and 0.8 MW). In the meantime, and remain constant as they are clamped down by the voltage of feeder 2 after grid-connection, and maintains at ; rises rapidly after closing without dash current, and enters into a stable status about 15 s later. It is obvious that the island with DFIG4 and DFIG5 under ACS control can securely recover the grid-connection status through coordination with L62 for local synchronous closing.
- ①
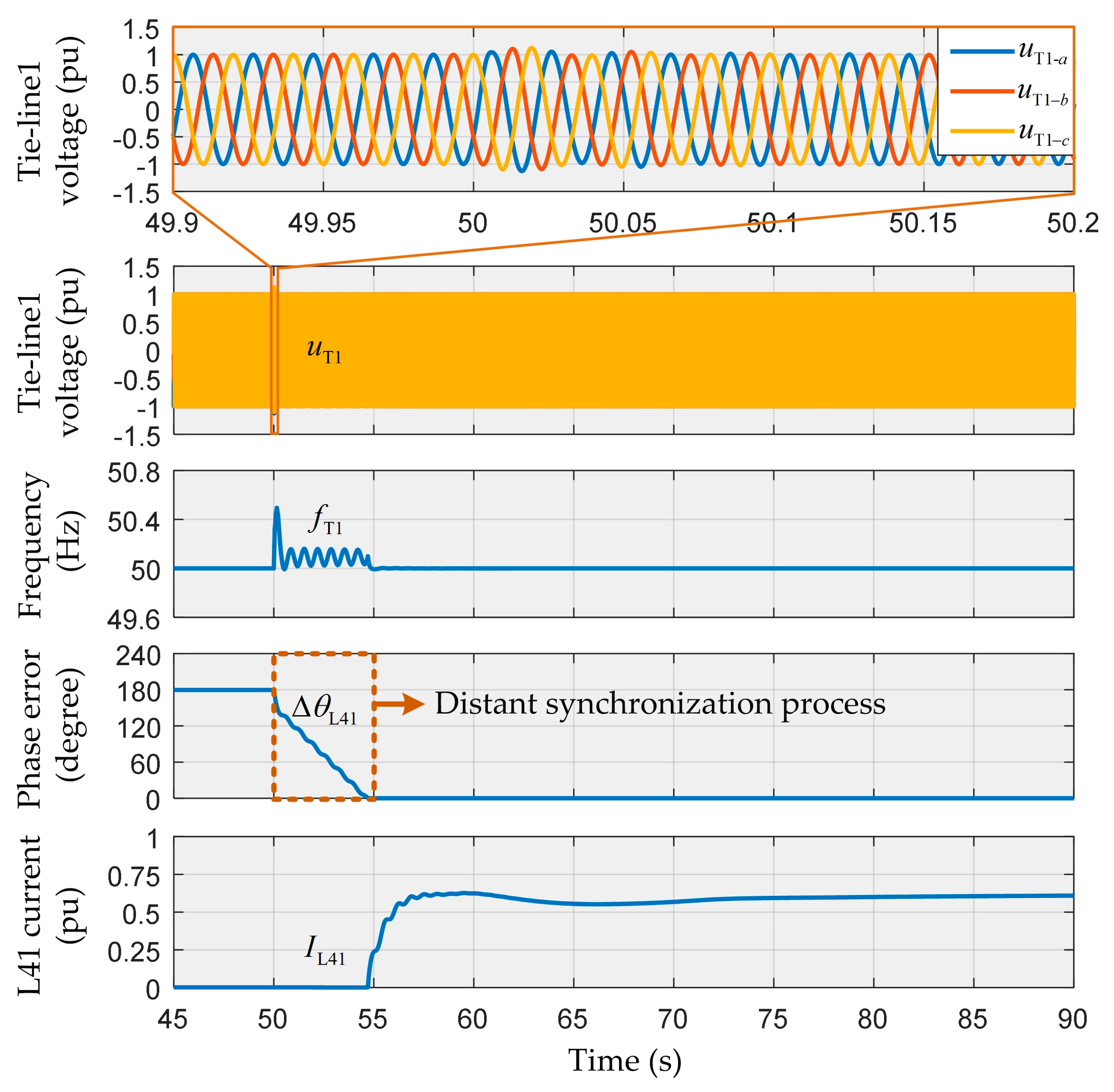
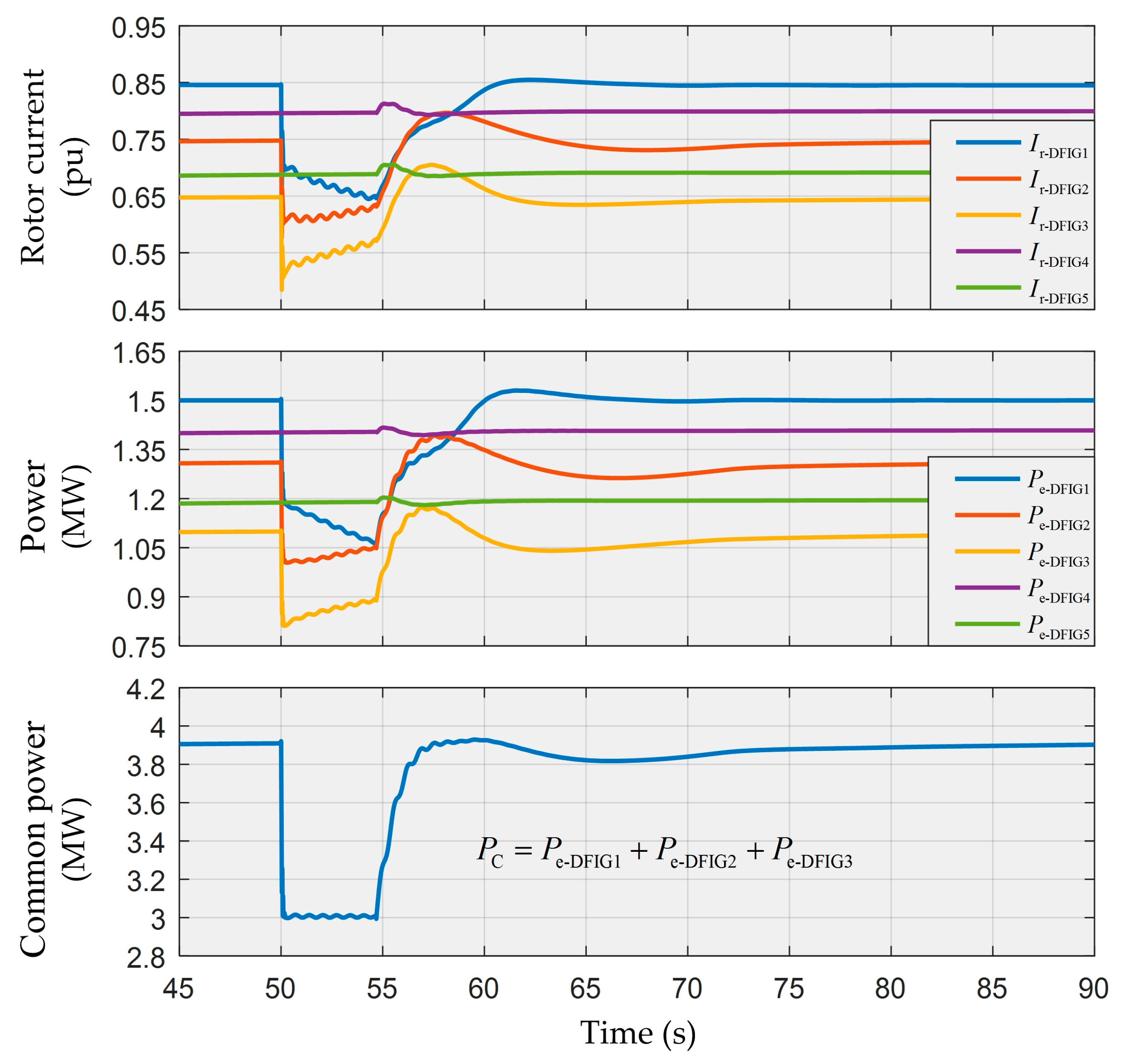
- Grid-connection/Island Switching: the service is cut off at 50 s, DFIG1, DFIG2, DFIG3, RMU1, RMU2, RMU3, tie-line 1 and loads constitute an island with three wind turbines. DFIG1, DFIG2, and DFIG3 enter into the islanding mode under ACS control, while the voltage uT1 of the tie-line 1 jitters to 1.2 pu of the amplitude maximally for about 2.5 cycles, and the waveform transits flatly. Similarly, mainly due to the sudden change of power (from 3.9 MW to 3 MW), the voltage frequency of tie-line 1 shows a peak of 50.48 Hz, no more than the allowable value; the rotor current amplitudes of DFIG1, DFIG2, and DFIG3 (, and ) suddenly change without overcurrent; the electromagnetic powers of DFIG1, DFIG2, and DFIG3 (, and ) also rapidly change and their sum () matches with the island loads of 3 MW. It can be seen that the DFIG1, DFIG2, and DFIG3 under ACS control can seamlessly enter into the multiple wind turbine island mode.
- ②
- Distant Synchronization Process: when the DFIG1, DFIG2, and DFIG3 enter into the islanding mode with imbalanced power, the amplitude of remains relatively stable while , and close to each other; DFIG1, DFIG2, and DFIG3 automatically distribute , and to maintain at a relative stable value; fluctuates around 50.1 Hz to cause the error of voltage phase between both sides of the tie-switch L41 reducing to . It is obvious that the island with DFIG1, DFIG2, and DFIG3 under ACS control can automatically create distant synchronization conditions.
- ③
- Island Grid-connection Process: the tie-switch L41 receives the FIS GOOSE message through FA as the circuit breakers L11 and S1 trip, and immediately closes to active feeder 3 as the synchronization conditions () are detected locally through the synchronization check device at 54.7 s, when the DFIG1, DFIG2 and DFIG3 switch to the grid-connection status, and , and recover in an undulatory manner, during which, and fluctuate significantly; and fluctuate transitorily (about 5 s) when L41 closes, and then stabilizes; , and show the similar change tendency as the rotor currents, while and are subject to larger fluctuation as compared with the during grid-connection recovery, and and are shocked to a certain degree when L41 closes. In the meantime, and remain constant as they are clamped down by the voltage of feeder 3 after grid-connection, and maintains at ; Current amplitude of tie-switch L41 rises rapidly without dash current, and enters into a stable status after slight fluctuation. It is obvious that the DFIG1, DFIG2 and DFIG3 islands under ACS control can securely recover the grid-connection status through coordination with L41 for local synchronous closing, while DFIG4 and DFIG5 stabilize rapidly after temporary and limited shocks.
6. Conclusions
- ①
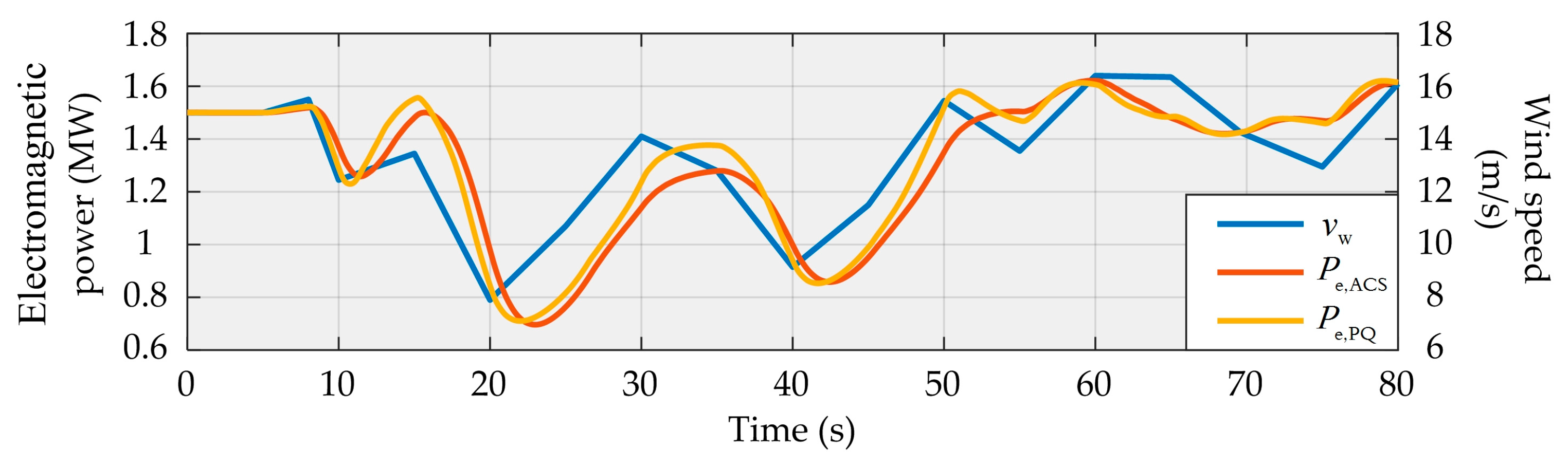
- The ACS proposed herein has similar power control characteristics as found in traditional PQ control that the DFIG can work effectively in grid-connection mode.
- ②
- As the FA isolates a feeder fault, one or multiple DFIGs under different wind speeds can achieve seamless switching between grid-connection/island modes under ACS control, and continuously supply power to partial local loads.
- ③
- During DFIG islanding, ACS’s differential regulation to frequency and power imbalance result in the automatic satisfaction of synchronization conditions at remote tie-switches.
- ④
- After FA fault isolation, the tie-switches can close based on local detection of synchronization conditions and the DFIG under ACS control can be securely grid-connected without establishing an additional communication system with the DN.
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Description |
|---|---|
| Electromagnetic power reference | |
| Actual output electromagnetic power | |
| Total electromagnetic power of DFIG island | |
| Electromagnetic power under traditional PQ control | |
| Electromagnetic power under ACS control | |
| Damping power | |
| Electromagnetic power of DFIGx | |
| Electric angular frequency of rotor | |
| Reference angular velocity of wind turbine | |
| Angular frequency of fundamental wave | |
| Angular frequency reference of grid | |
| Grid voltage angular frequency | |
| Slip angular frequency | |
| Stable speed of wind turbine at a certain operation point | |
| Synchronous angular frequency/ Stator voltage angular frequency | |
| Resonance term bandwidth of quasi-proportional resonant controller | |
| Island voltage angular frequency/ Inner potential angular frequency of stator | |
| & | Resistances of stator and rotor |
| & | Self-inductance of stator and rotor |
| Mutual inductance | |
| Voltage frequency of tie-line 1 | |
| Voltage frequency of tie-line 2 | |
| Inner potential of stator | |
| Inner potential amplitude of stator | |
| Space vectors of island voltage | |
| Space vectors of grid voltage | |
| Voltage of the tie-line 1 | |
| Voltage of the tie-line 2 | |
| & | Voltage space vectors of stator and rotor in stator static reference frame |
| , & | Three-phase excitation voltages of the rotor in rotor reference frame |
| Reference of stator voltage amplitude | |
| Actual stator voltage amplitude | |
| Synchronous reactance | |
| Mutual reactance | |
| & | Current space vectors of stator and rotor in stator static reference frame |
| , & | Reference of three-phase rotor excitation currents in rotor reference frame |
| , & | Actual excitation currents of rotor in rotor reference frame |
| Reference of rotor excitation current amplitude | |
| Rotor current amplitude of DFIGx | |
| Current amplitude of tie-switch L62 | |
| Current amplitude of tie-switch L41 | |
| Space vector reference of rotor excitation currents in rotor reference frame | |
| Error of voltage phase between both sides of tie-switch L62 | |
| Error of voltage phase between both sides of tie-switch L41 | |
| Inner potential control phase of stator | |
| Excitation current phase of rotor | |
| Inner potential phase of stator | |
| Rotor phase | |
| Proportional coefficient of quasi-proportional resonant controller | |
| Resonance term gain of quasi-proportional resonant controller | |
| Wind speed | |
| Pitch angle of blades | |
| Inertia time constant of power control | |
| Proportional coefficient of power control | |
| Damping coefficient of power control | |
| Mechanical energy capture by wind wheel | |
| Inherent mechanical inertia time constant of wind turbine | |
| Inherent mechanical damping coefficient of wind turbine | |
| & | Equivalent inertia and damping of DFIG under ACS control |
| & | Proportional and integral coefficient of torque control |
| & | Proportion and integral coefficient of voltage control |
| DFIG Machine | |||
| Parameter | Value | Parameter | Value |
| 0.023 pu | 1150 V | ||
| 0.016 pu | Rated power | 1.5 MW | |
| 3.08 pu | Stator voltage | 690 V | |
| 3.06 pu | Pole pairs | 3 | |
| 2.9 pu | Normal speed | 1.2 pu | |
| 4.96 | DC-link capacitor | 10,000 uF | |
| 1.5 | Rated frequency | 50 Hz | |
| ACS | |||
| 3 | 20 | ||
| 0.6 | 33 | ||
| 0.11 | |||
| 4.96 | 1 | ||
| 151 | 40 | ||
| DN | |||
| Rated voltage | 10 KV | Line inductance | 0.9337 × 10−3 H/km |
| Rated frequency | 50 Hz | Line capacitance | 12.74 × 10−9 F/km |
| Line resistance | 0.01273 Ω/km | ||
References
- João, P.S.; Catalão, S.; Rahimi, E.; Javadi, M.S.; Nezhad, A.E.; Lotfi, M.; Shafie-khah, M.; Catalão, J.P.S. Impact of distributed generation on protection and voltage regulation of distribution systems: A review. Renew. Sustain. Energy Rev. 2019, 105, 157–167. [Google Scholar]
- Blaabjerg, F.; Yang, Y.; Yang, D.; Wang, X. Distributed Power-Generation Systems and Protection. Proc. IEEE 2017, 105, 1311–1331. [Google Scholar] [CrossRef]
- Roy, N.K.; Pota, H.R. Current Status and Issues of Concern for the Integration of Distributed Generation into Electricity Networks. IEEE Syst. J. 2015, 9, 933–944. [Google Scholar] [CrossRef]
- Monadi, M.; Amin Zamani, M.; Ignacio Candela, J.; Luna, A.; Rodriguez, P. Protection of AC and DC distribution systems Embedding distributed energy resources: A comparative review and analysis. Renew. Sustain. Energy Rev. 2015, 51, 1578–1593. [Google Scholar] [CrossRef]
- Kennedy, J.; Ciufo, P.; Agalgaonkar, A. A review of protection systems for distribution networks embedded with renewable generation. Renew. Sustain. Energy Rev. 2016, 58, 1308–1317. [Google Scholar] [CrossRef]
- Nikolaidis, V.C.; Papanikolaou, E.; Safigianni, A.S. A Communication-Assisted Overcurrent Protection Scheme for Radial Distribution Systems with Distributed Generation. IEEE Trans. Smart Grid. 2016, 7, 114–123. [Google Scholar] [CrossRef]
- Bansal, R. Power System Protection in Smart Grid Environment, 1st ed.; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Norshahrani, M.; Mokhlis, H.; Abu Bakar, A.; Jamian, J.; Sukumar, S. Progress on Protection Strategies to Mitigate the Impact of Renewable Distributed Generation on Distribution Systems. Energies 2017, 10, 1864. [Google Scholar] [CrossRef]
- Sajadi, A.; Strezoski, L.; Strezoski, V.; Prica, M.; Loparo, K.A. Integration of renewable energy systems and challenges for dynamics, control, and automation of electrical power systems. Wires Energy Environ. 2019, 8, e321. [Google Scholar] [CrossRef]
- Vyas, S.; Kumar, R.; Kavasseri, R. Data analytics and computational methods for anti-islanding of renewable energy based Distributed Generators in power grids. Renew. Sustain. Energy Rev. 2017, 69, 493–502. [Google Scholar] [CrossRef]
- Peixin, Y.; Peichao, Z. A Survey on Interconnection Protection of Distributed Resource. Power Syst. Techn. 2016, 06, 1888–1895. [Google Scholar]
- Manditereza, P.T.; Bansal, R. Renewable distributed generation: The hidden challenges—A review from the protection perspective. Renew. Sustain. Energy Rev. 2016, 58, 1457–1465. [Google Scholar] [CrossRef]
- Motter, D.; de Melo Vieira, J.C. The Setting Map Methodology for Adjusting the DG Anti-Islanding Protection Considering Multiple Events. IEEE Trans. Power Deliv. 2018, 33, 2755–2764. [Google Scholar] [CrossRef]
- Zidan, A.; Khairalla, M.; Abdrabou, A.M.; Khalifa, T.; Shaban, K.; Abdrabou, A.; El Shatshat, R.; Gaouda, A.M. Fault Detection, Isolation, and Service Restoration in Distribution Systems: State-of-the-Art and Future Trends. IEEE Trans. Smart Grid 2017, 8, 2170–2185. [Google Scholar] [CrossRef]
- Zhan, H.; Wang, C.; Wang, Y.; Yang, X.; Zhang, X.; Wu, C.; Chen, Y. Relay Protection Coordination Integrated Optimal Placement and Sizing of Distributed Generation Sources in Distribution Networks. IEEE Trans. Smart Grid 2016, 7, 55–65. [Google Scholar] [CrossRef]
- Abdel-Ghany, H.A.; Azmy, A.M.; Elkalashy, N.I.; Rashad, E.M. Optimizing DG penetration in distribution networks concerning protection schemes and technical impact. Electr. Power Syst. Res. 2015, 128, 113–122. [Google Scholar] [CrossRef]
- Badran, O.; Mekhilef, S.; Mokhlis, H.; Dahalan, W. Optimal reconfiguration of distribution system connected with distributed generations: A review of different methodologies. Renew. Sustain. Energy Rev. 2017, 73, 854–867. [Google Scholar] [CrossRef]
- Xyngi, I.; Popov, M. An Intelligent Algorithm for the Protection of Smart Power Systems. IEEE Trans. Smart Grid 2013, 4, 1541–1548. [Google Scholar] [CrossRef]
- Wheeler, K.A.; Elsamahy, M.; Faried, S.O. A Novel Reclosing Scheme for Mitigation of Distributed Generation Effects on Overcurrent Protection. IEEE Trans. Power Deliv. 2018, 33, 981–991. [Google Scholar] [CrossRef]
- Zhu, Z.; Xu, B.; Brunner, C.; Yip, T.; Chen, Y. IEC 61850 Configuration Solution to Distributed Intelligence in Distribution Grid Automation. Energies 2017, 10, 528. [Google Scholar] [CrossRef]
- Ling, W.; Liu, D.; Yang, D.; Sun, C. The situation and trends of feeder automation in China. Renew. Sust. Energy Rev. 2015, 50, 1138–1147. [Google Scholar] [CrossRef]
- Chenghong, T.; Zhihong, Y.; Bin, S.; Yajun, Z. A Method of Intelligent Distributed Feeder Automation for Active Distribution Network. Autom. Electr. Power Syst. 2015, 9, 101–106. [Google Scholar]
- Wanshui, L.; Dong, L.; Yiming, L.; Wenpeng, Y. Model of intelligent distributed feeder automation based on IEC 618510. Autom. Electr. Power Syst. 2012, 36, 90–95. [Google Scholar]
- Tanvir, A.; Merabet, A.; Beguenane, R. Real-Time Control of Active and Reactive Power for Doubly Fed Induction Generator (DFIG)-Based Wind Energy Conversion System. Energies 2015, 8, 10389–10408. [Google Scholar] [CrossRef]
- Shukla, R.D.; Tripathi, R.K. A novel voltage and frequency controller for standalone DFIG based Wind Energy Conversion System. Renew. Sustain. Energy Rev. 2014, 37, 69–89. [Google Scholar] [CrossRef]
- Lin, L.; Xibin, S.; Zongxun, S. Operation mode analysis of micro-grid grid-connected and island based on DFIG control method. Power Syst. Protect. Control 2017, 45, 158–163. [Google Scholar]
- Hosseini, S.M.; Carli, R.; Dotoli, M. Robust Day-Ahead Energy Scheduling of a Smart Residential User Under Uncertainty. In Proceedings of the 2019 18th European Control Conference, Naples, Italy, 25–28 June 2019; pp. 935–940. [Google Scholar]
- Sperstad, I.; Korpås, M. Energy Storage Scheduling in Distribution Systems Considering Wind and Photovoltaic Generation Uncertainties. Energies 2019, 12, 1231. [Google Scholar] [CrossRef]
- Sitharthan, R.; Karthikeyan, M.; Sundar, D.S.; Rajasekaran, S. Adaptive hybrid intelligent MPPT controller to approximate effectual wind speed and optimal rotor speed of variable speed wind turbine. ISA. Trans. 2019, in press. [Google Scholar] [CrossRef]
- Miller, N.W.; Sanchez-Gasca, J.J.; Price, W.W.; Delmerico, R.W. Dynamic modeling of GE 1.5 and 3.6 MW wind turbine-generators for stability simulations. In Proceedings of the IEEE Power Engineering Society General Meeting (IEEE Cat. No.03CH37491), Toronto, ON, Canada, 13–17 July 2003; pp. 1977–1983. [Google Scholar]
- Pena, R.; Clare, J.C.; Asher, G.M. Doubly fed induction generator uising back-to-back PWM converters and its application to variable- speed wind-energy generation. IEE Proc. Electr. Power Appl. 1996, 3, 231–241. [Google Scholar] [CrossRef]
- Wang, S.; Hu, J.; Yuan, X. Virtual Synchronous Control for Grid-Connected DFIG-Based Wind Turbines. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 932–944. [Google Scholar] [CrossRef]
- Ye, T.; Dai, N.; Lam, C.; Wong, M.; Guerrero, J.M. Analysis, Design, and Implementation of a Quasi-Proportional-Resonant Controller for a Multifunctional Capacitive-Coupling Grid-Connected Inverter. IEEE Trans. Ind. Appl. 2016, 52, 4269–4280. [Google Scholar] [CrossRef]
- Holmes, D.G.; Lipo, T.A.; McGrath, B.P.; Kong, W.Y. Optimized Design of Stationary Frame Three Phase AC Current Regulators. IEEE Trans. Power Electr. 2009, 24, 2417–2426. [Google Scholar] [CrossRef]
- Clark, K.; Miller, N.W.; Sanchez-Gasca, J.J. Modeling of GE Wind Turbine-Generators for Grid Studies; General Electric International, Inc.: Schenectady, NY, USA, 2009. [Google Scholar]
- Carli, R.; Dotoli, M. Decentralized control for residential energy management of a smart users microgrid with renewable energy exchange. IEEE/CAA J. Autom. Sin. 2019, 6, 641–656. [Google Scholar] [CrossRef]
- Geidl, M.; Koeppel, G.; Favre-Perrod, P.; Klockl, B.; Andersson, G.; Frohlich, K. Energy hubs for the future. IEEE Power Energy Mag. 2007, 5, 24–30. [Google Scholar] [CrossRef]
















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, P.; Li, Z.; Hao, Z. A Doubly-Fed Induction Generator Adaptive Control Strategy and Coordination Technology Compatible with Feeder Automation. Energies 2019, 12, 4463. https://doi.org/10.3390/en12234463
Tian P, Li Z, Hao Z. A Doubly-Fed Induction Generator Adaptive Control Strategy and Coordination Technology Compatible with Feeder Automation. Energies. 2019; 12(23):4463. https://doi.org/10.3390/en12234463
Chicago/Turabian StyleTian, Peng, Zetao Li, and Zhenghang Hao. 2019. "A Doubly-Fed Induction Generator Adaptive Control Strategy and Coordination Technology Compatible with Feeder Automation" Energies 12, no. 23: 4463. https://doi.org/10.3390/en12234463
APA StyleTian, P., Li, Z., & Hao, Z. (2019). A Doubly-Fed Induction Generator Adaptive Control Strategy and Coordination Technology Compatible with Feeder Automation. Energies, 12(23), 4463. https://doi.org/10.3390/en12234463