A Simple Calibration Procedure for an LPIT plus PMU System Under Off-Nominal Conditions †

 ,
, 




Abstract
:1. Introduction
2. Calibration Procedure
2.1. Introduction
2.2. Tests
- RMS and phase of the phasors provided by the PMU (in the range 0–1000 V);
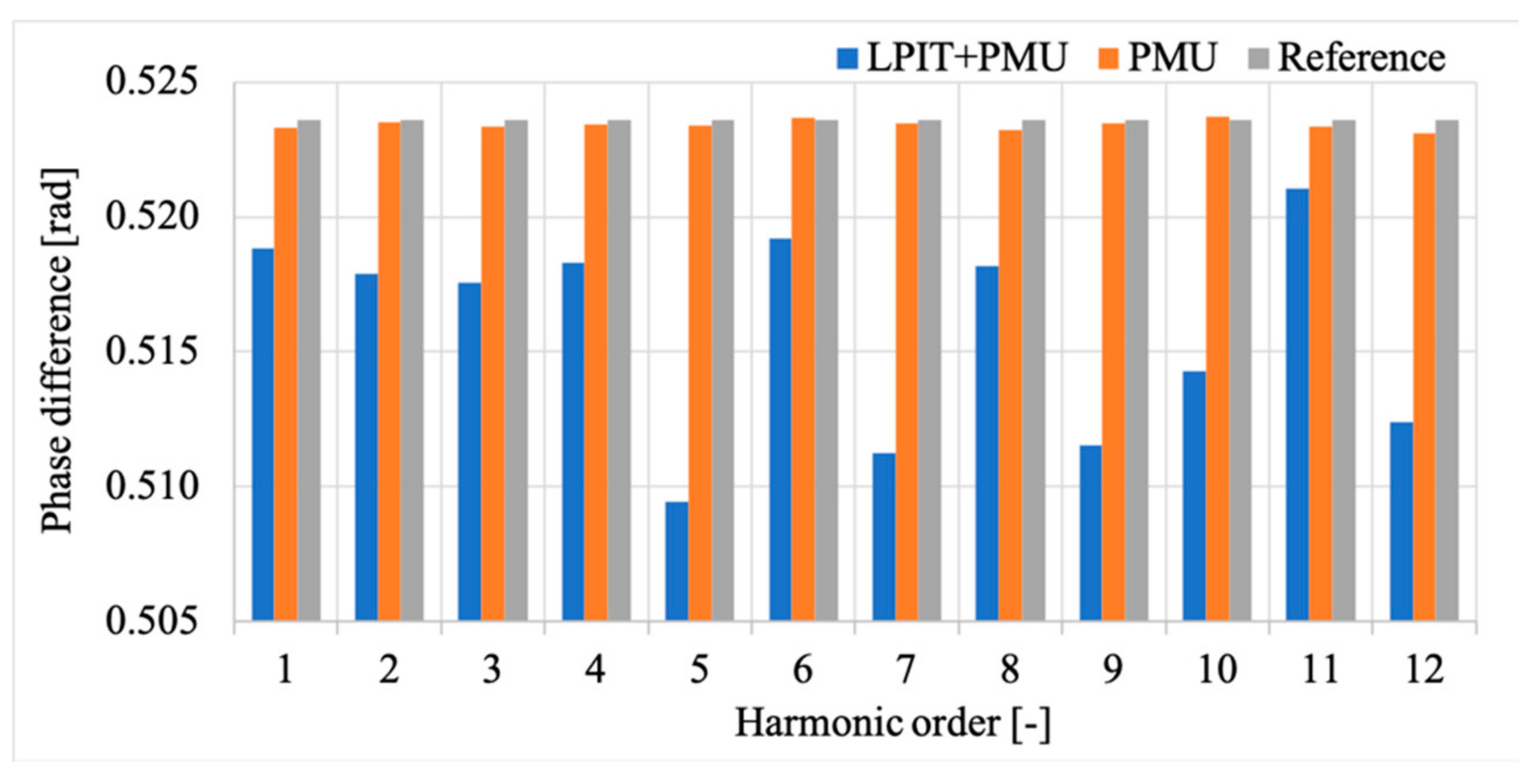
- Phase difference between current and voltage channels of the system LPIT + PMU. In particular, in [20], the absolute values of the phases were measured with a reference instrument. Therefore, in this work, the phase measurement results are simply collected by the PMU and evaluated with its algorithms.
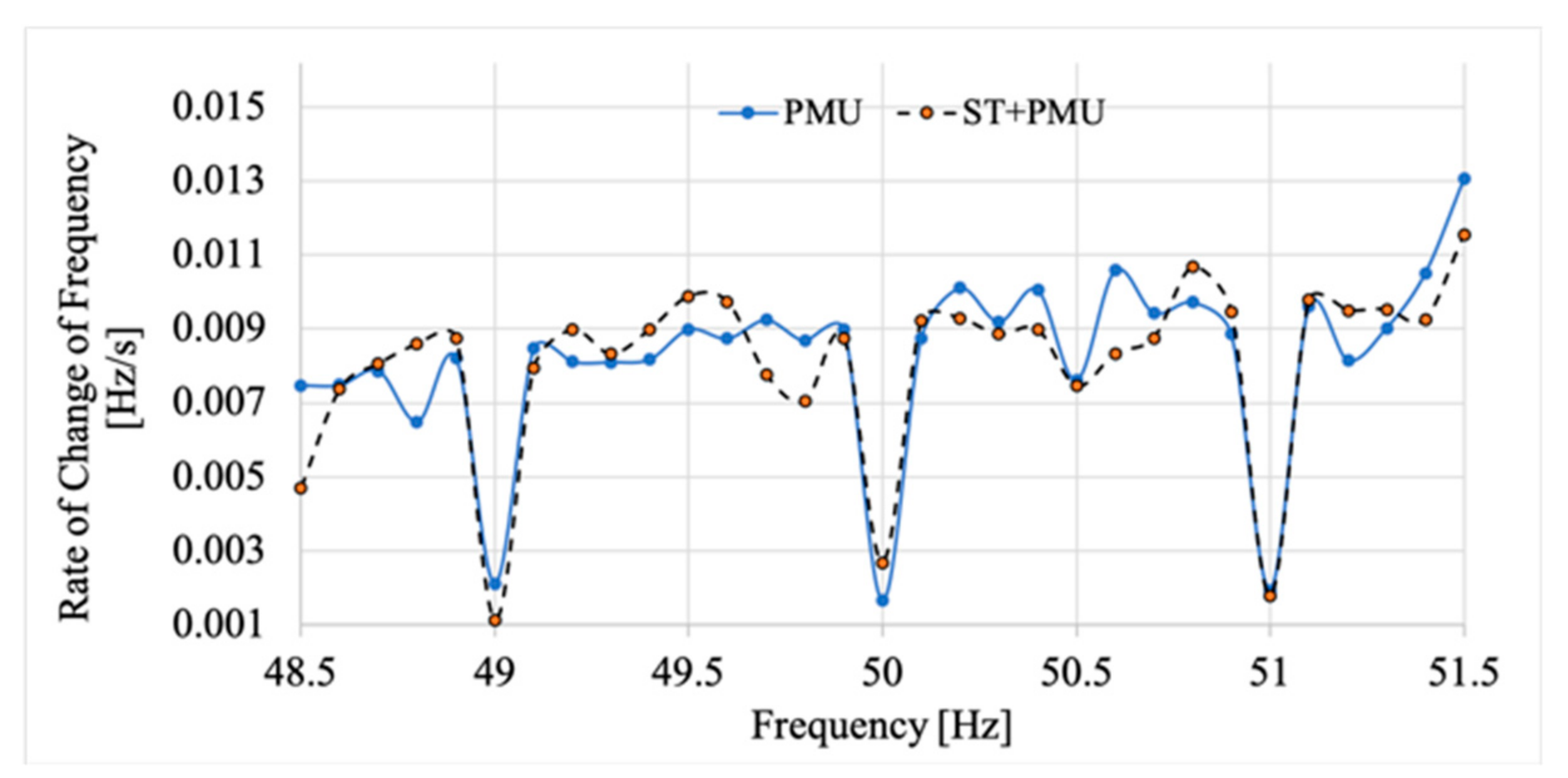
- Frequency and ROCOF (in accordance with [5]) on different days to assess the measurement repeatability over time.
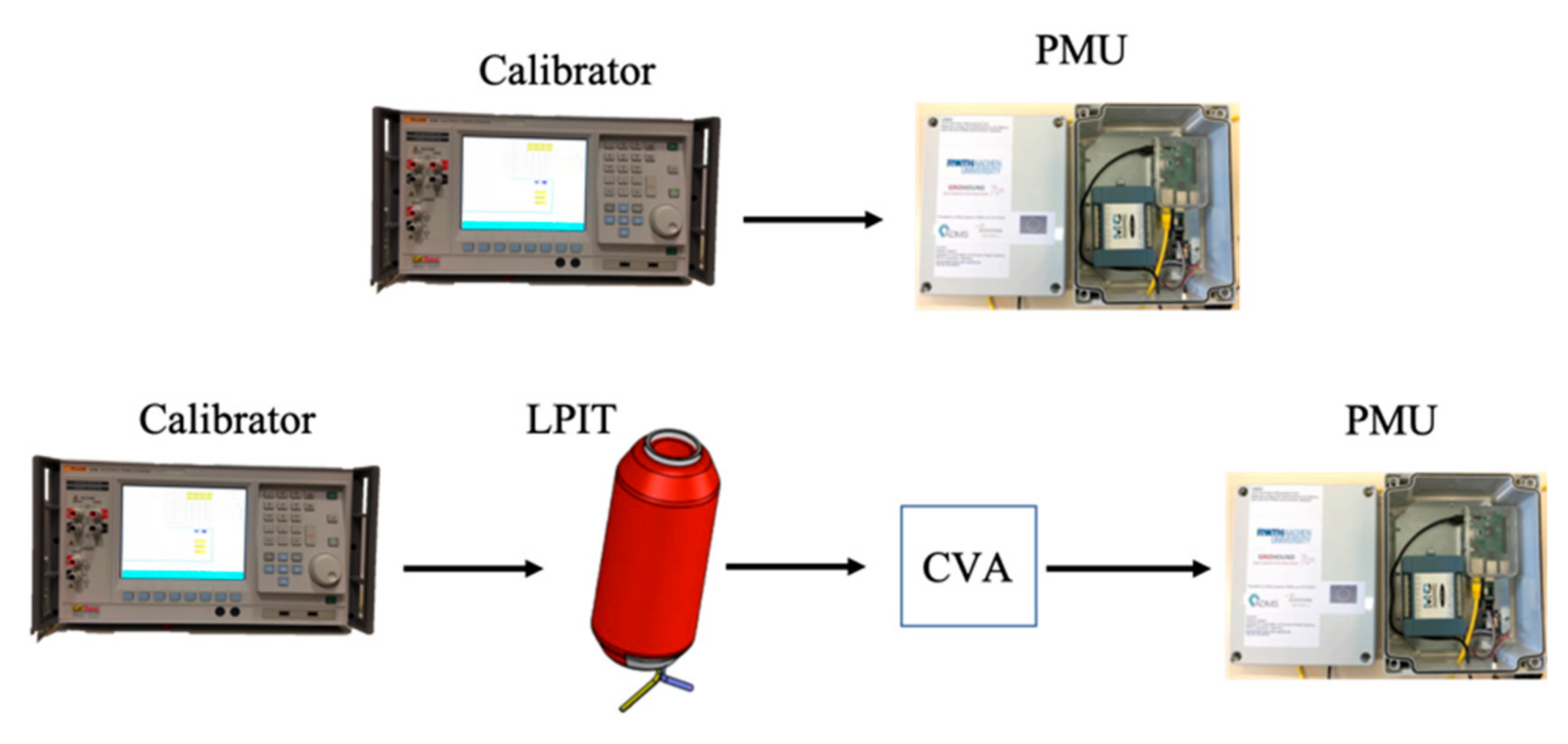
2.2.1. Tests with Calibrator + PMU
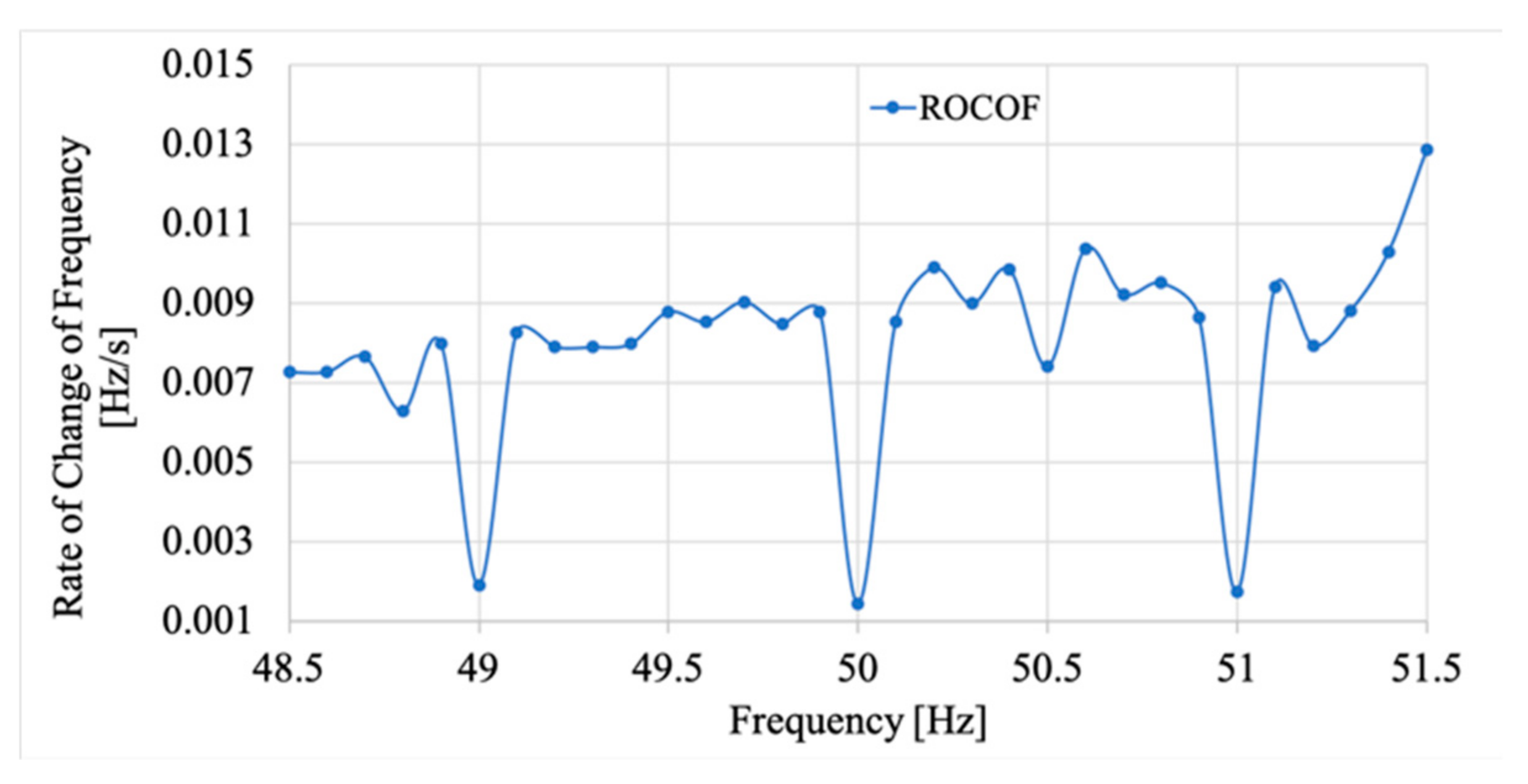
- Measurements vs. frequency.
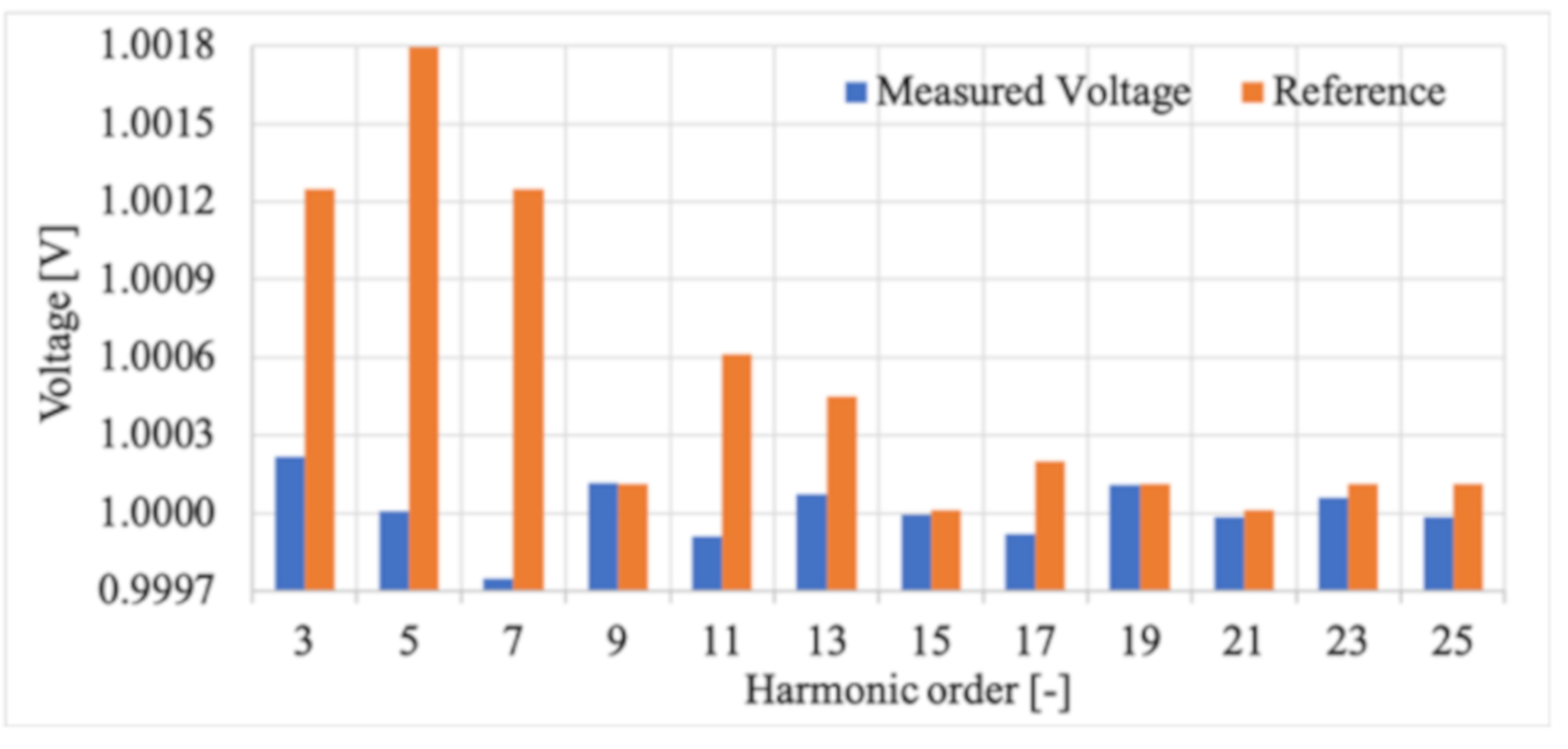
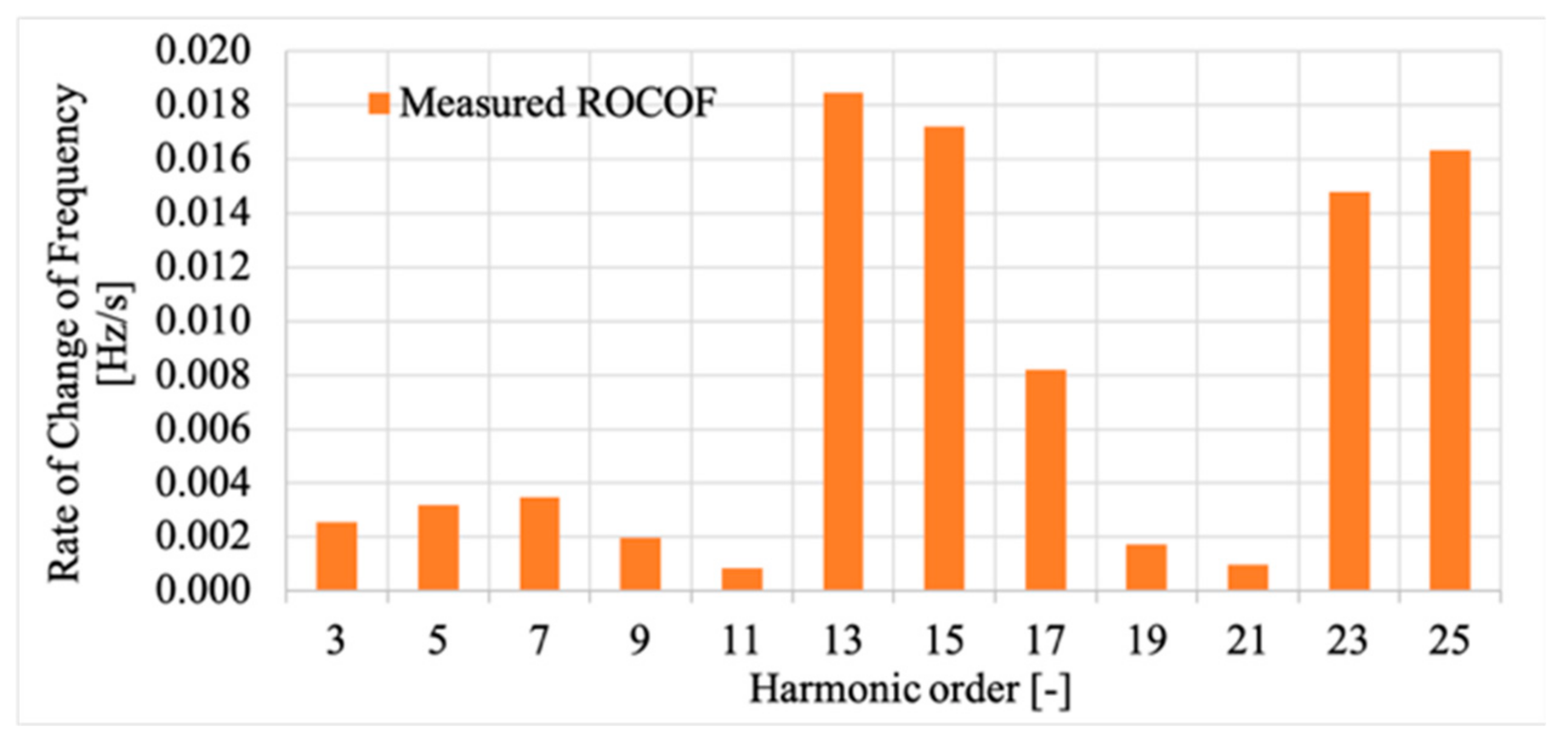
- Measurement vs. harmonics.
2.2.2. Tests with Calibrator + LPIT + PMU
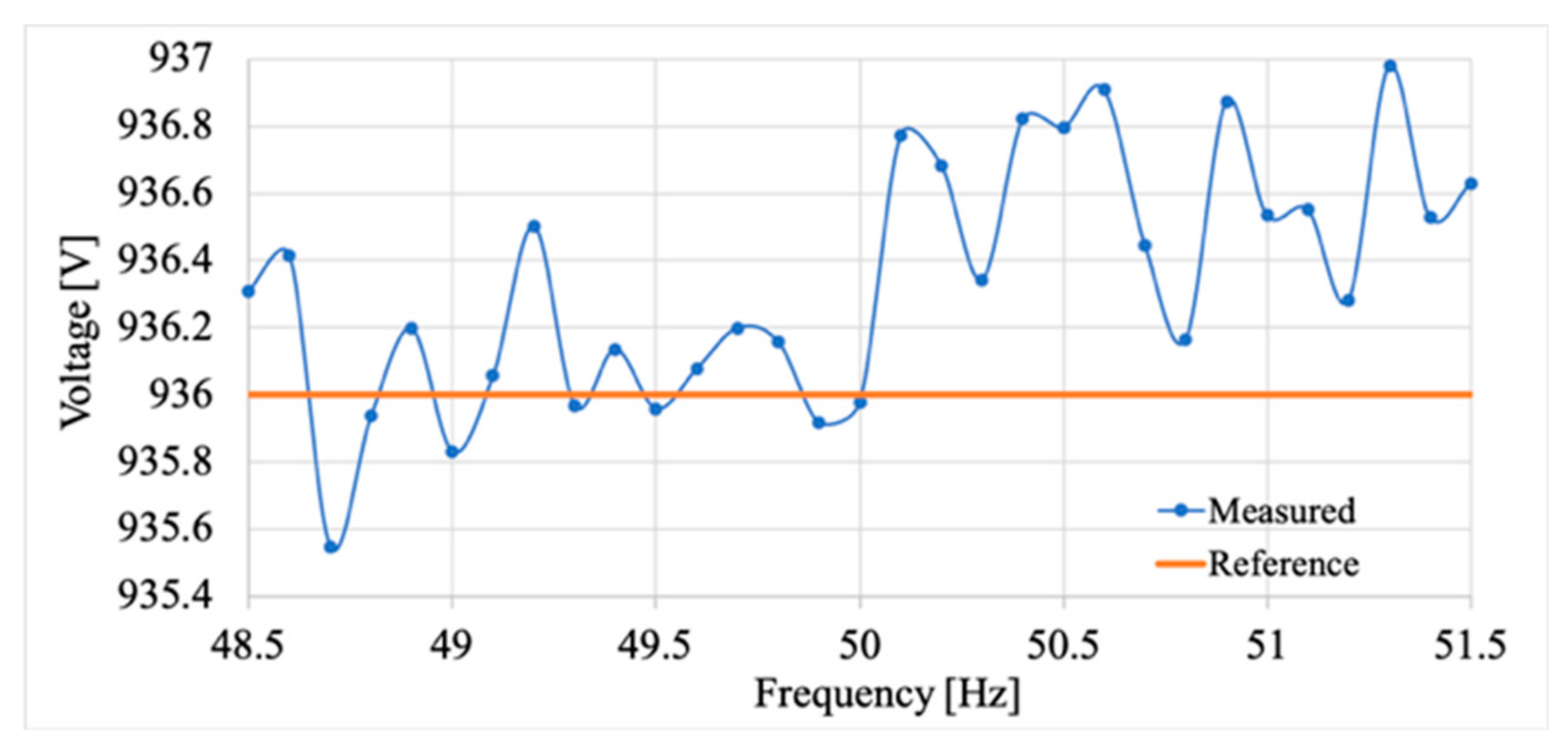
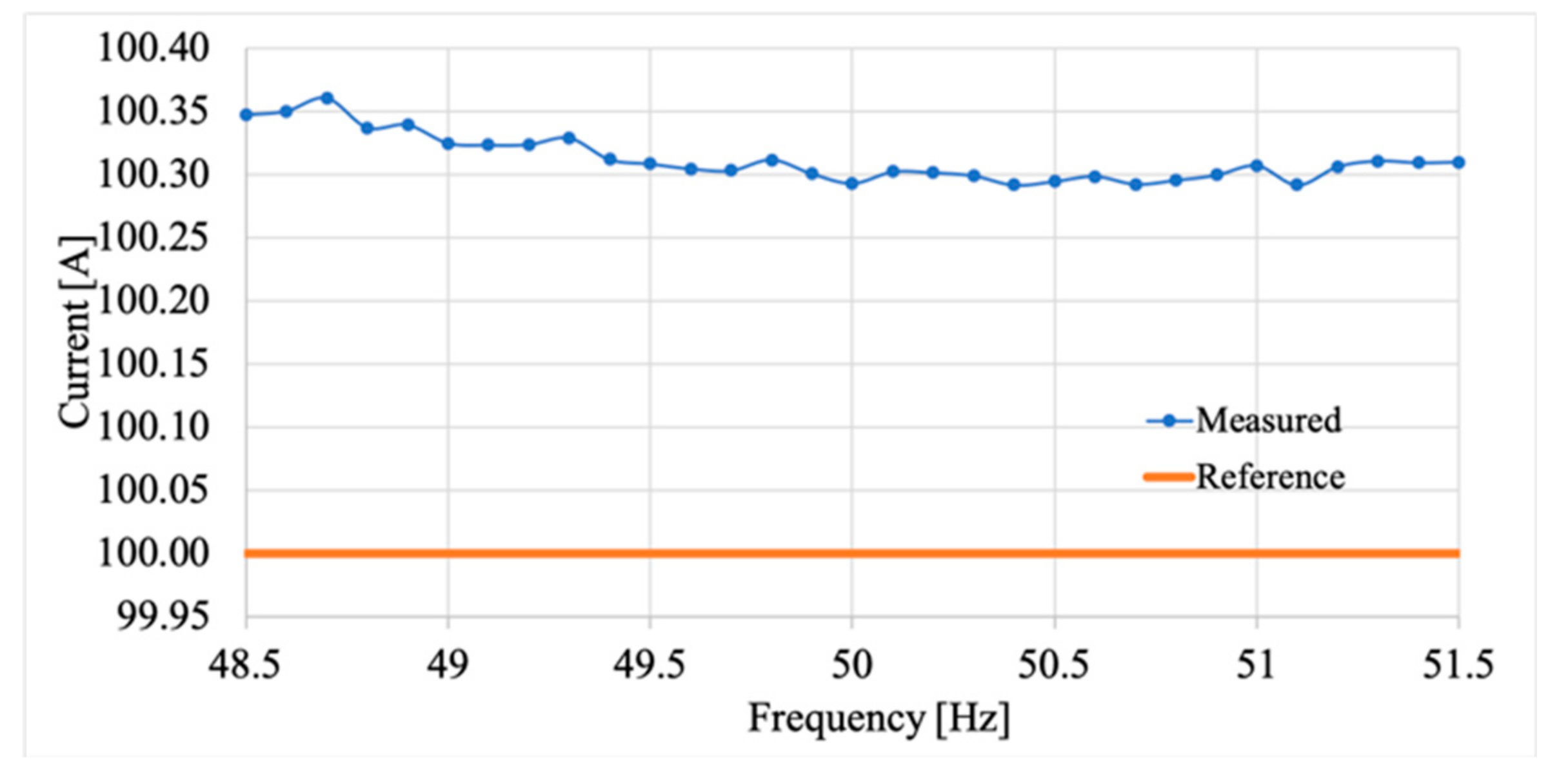
- Measurements vs. frequency.
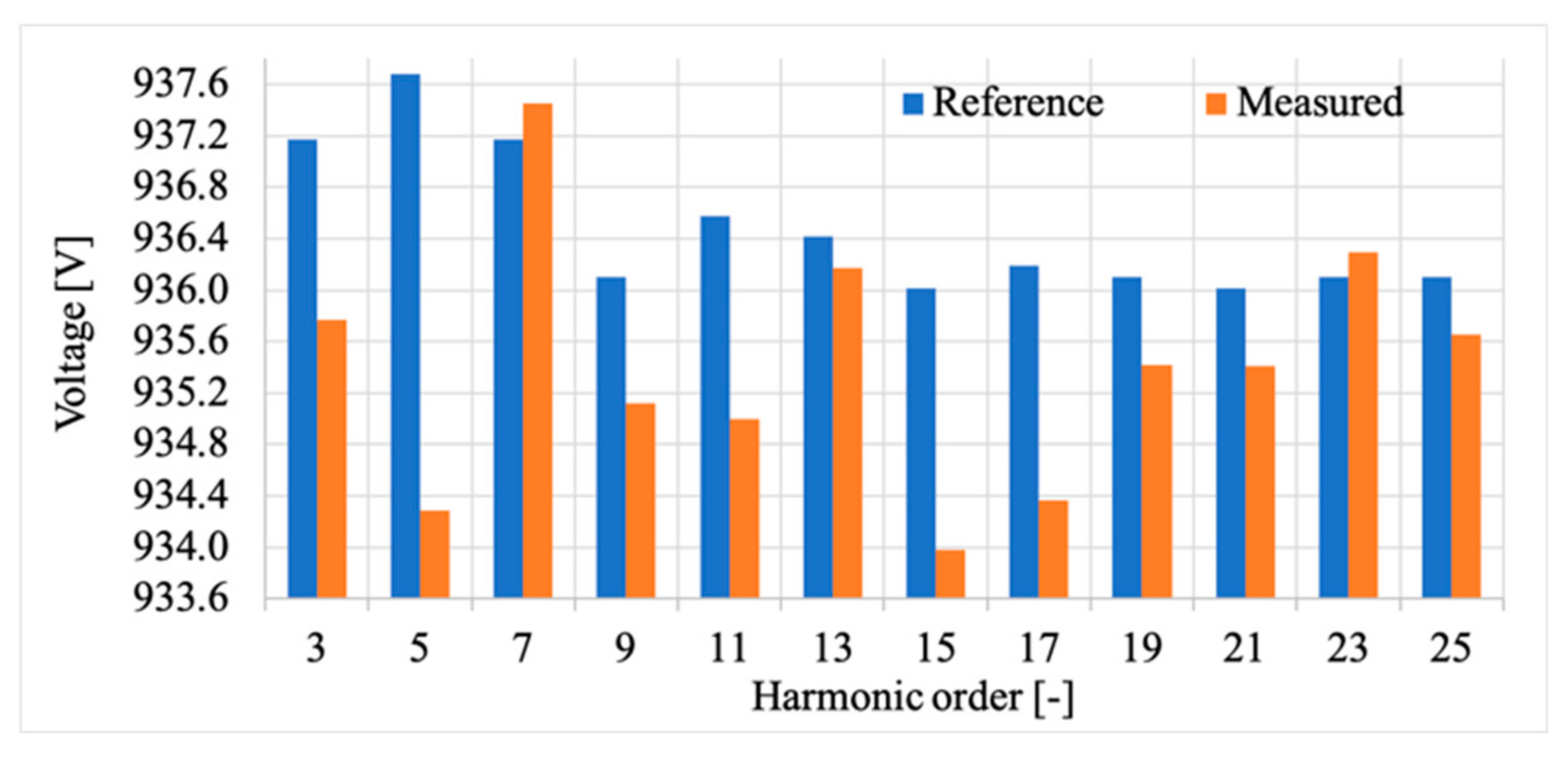
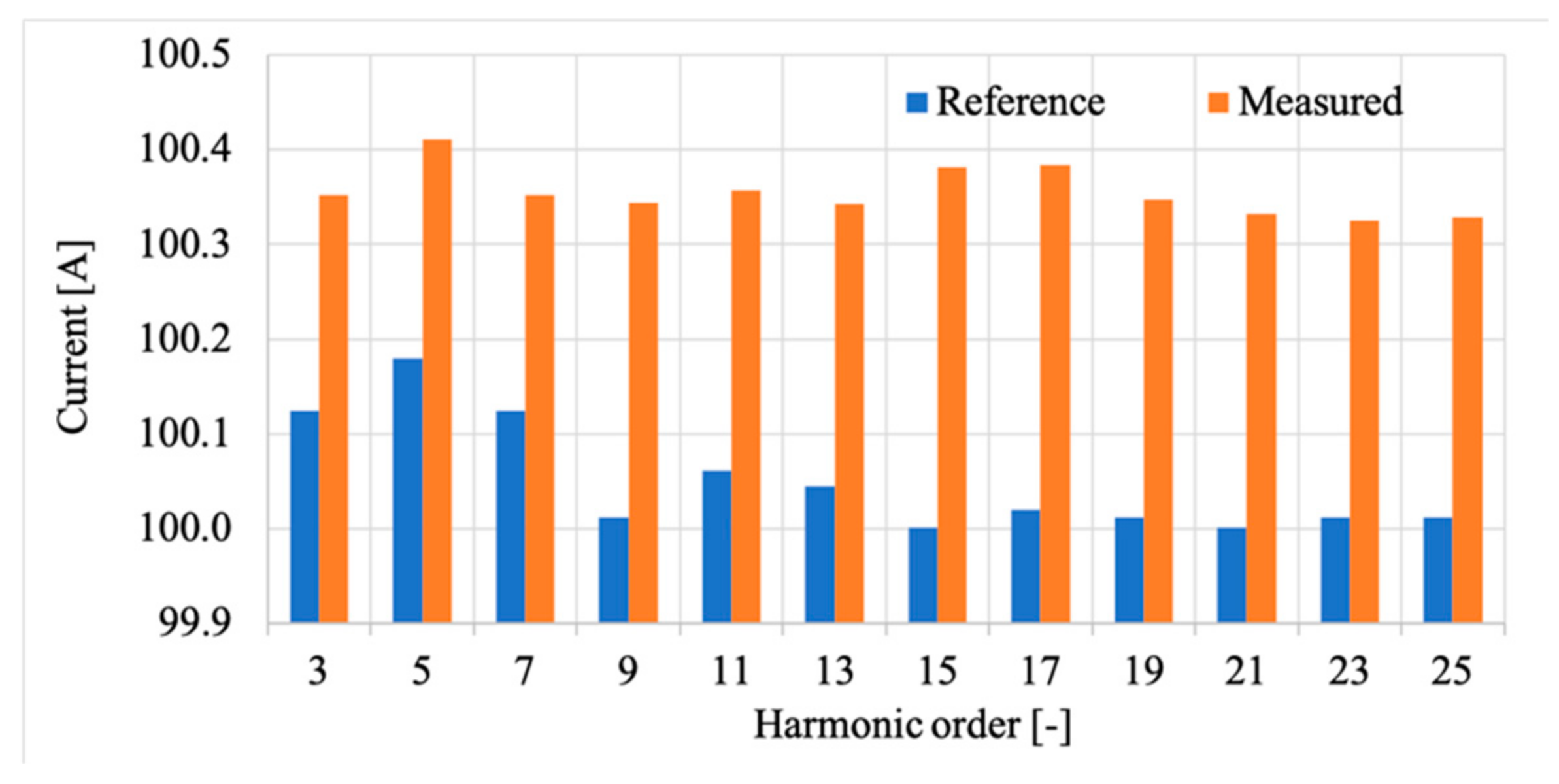
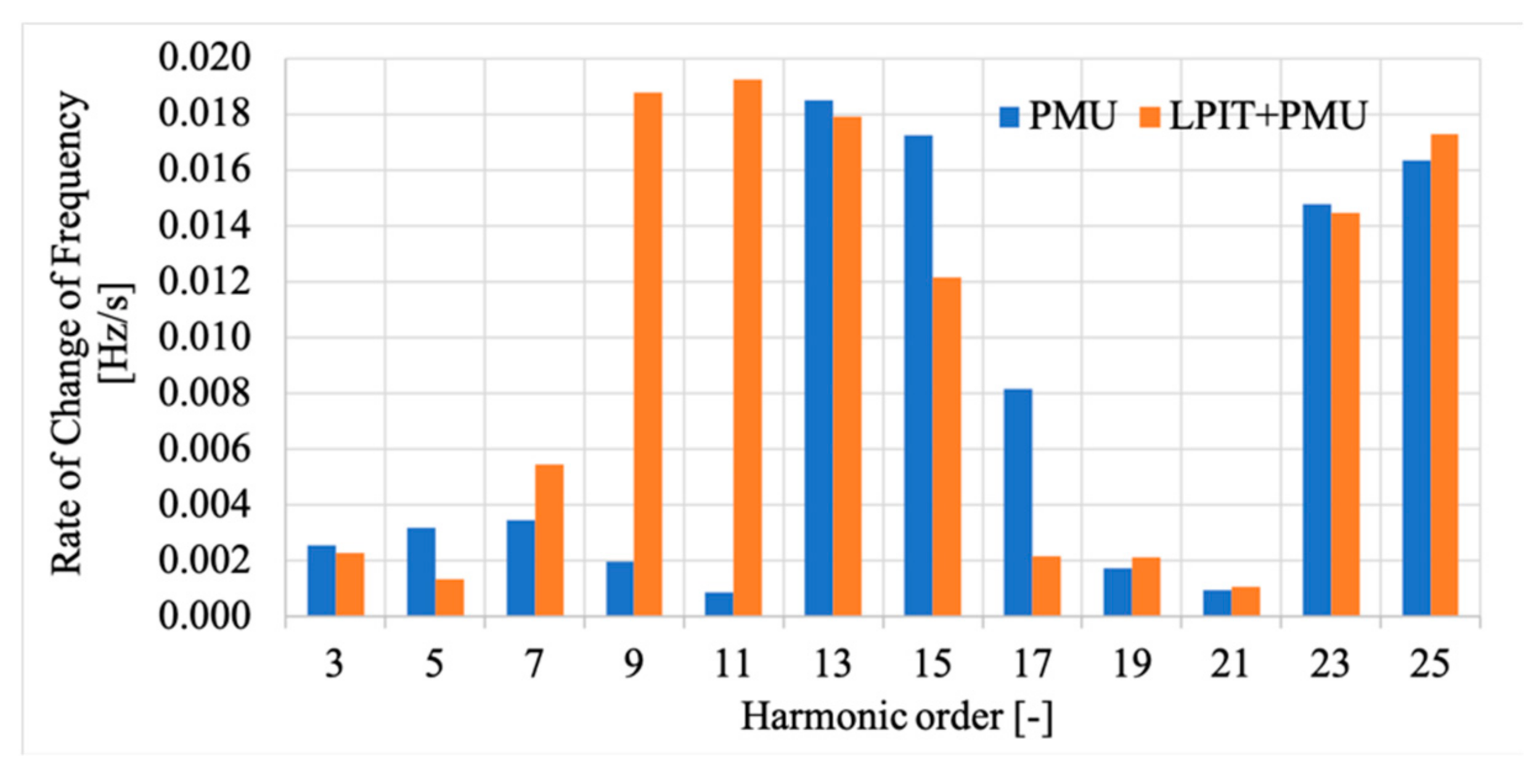
- Measurements vs. harmonics.
3. Case Study
3.1. Introduction
3.2. The LOCO PMU
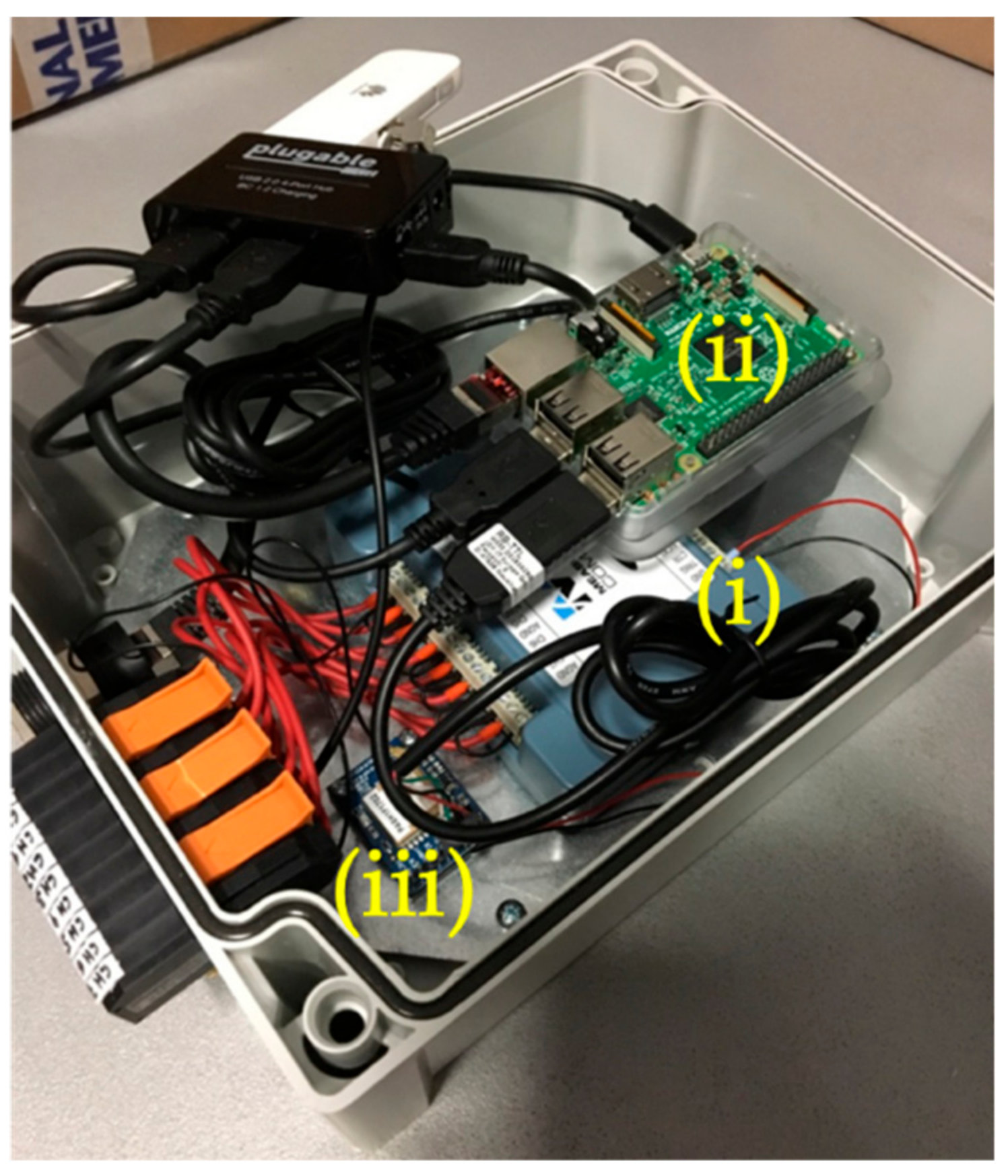
3.2.1. The Hardware Description
3.2.2. The Algorithm
3.3. The LPIT
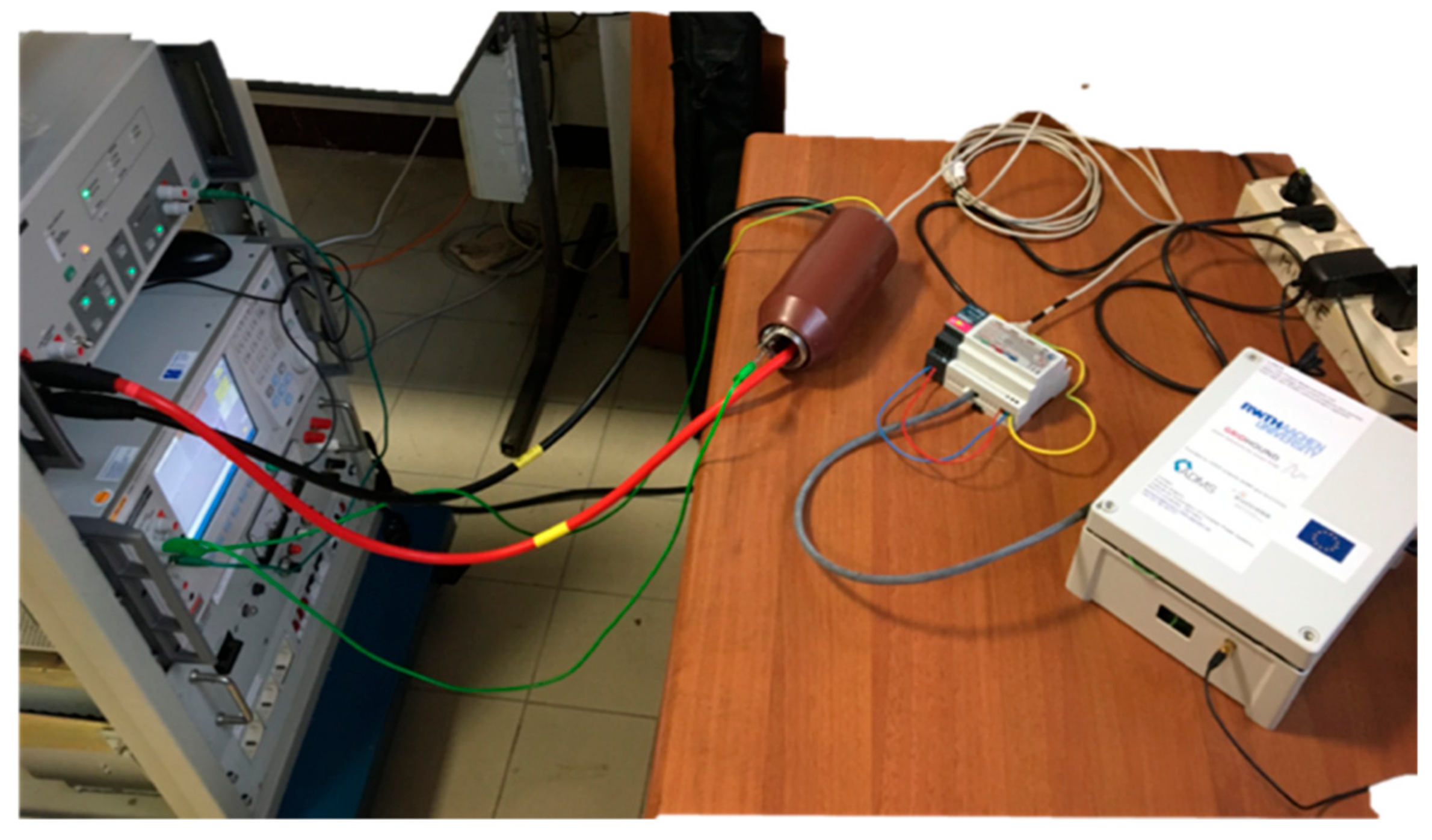
3.4. The Measurement Setup
- Calibrator Fluke 6105A under metrological confirmation. It provides the required output to the equipment at both sinusoidal (including frequencies different from 50 Hz) and non-sinusoidal conditions (with superimposed harmonics). Its accuracy specifications are collected in Table 2.
- LPIT. Its actual in/out ratios are 8782 and 34,934.56 for the voltage and the current, respectively. In particular, the voltage sensor consists of a capacitive voltage divider, whereas the current one is a Rogowski coil. Both sensors present high linearity in all their range of operation due to their working principles [1,40].
- The Low-Cost PMU, already detailed in Section 2.
- Current and Voltage Adapter (CVA): Such adapter has been developed inside the laboratory to condition the LPIT voltage and current outputs to obtain values suitable for the input range of the PMU. The CVA features input/output ratios of 400 and 4 for the current and the voltage, respectively. Moreover, its accuracy performances were assessed through a characterization process, performed by using the Fluke 6105A. The results have been omitted for the sake of brevity; however, the phase angle deviations obtained are negligible compared to the reference accuracies of the calibrator.
4. Calibration Results
4.1. Calibrator + PMU Tests Results
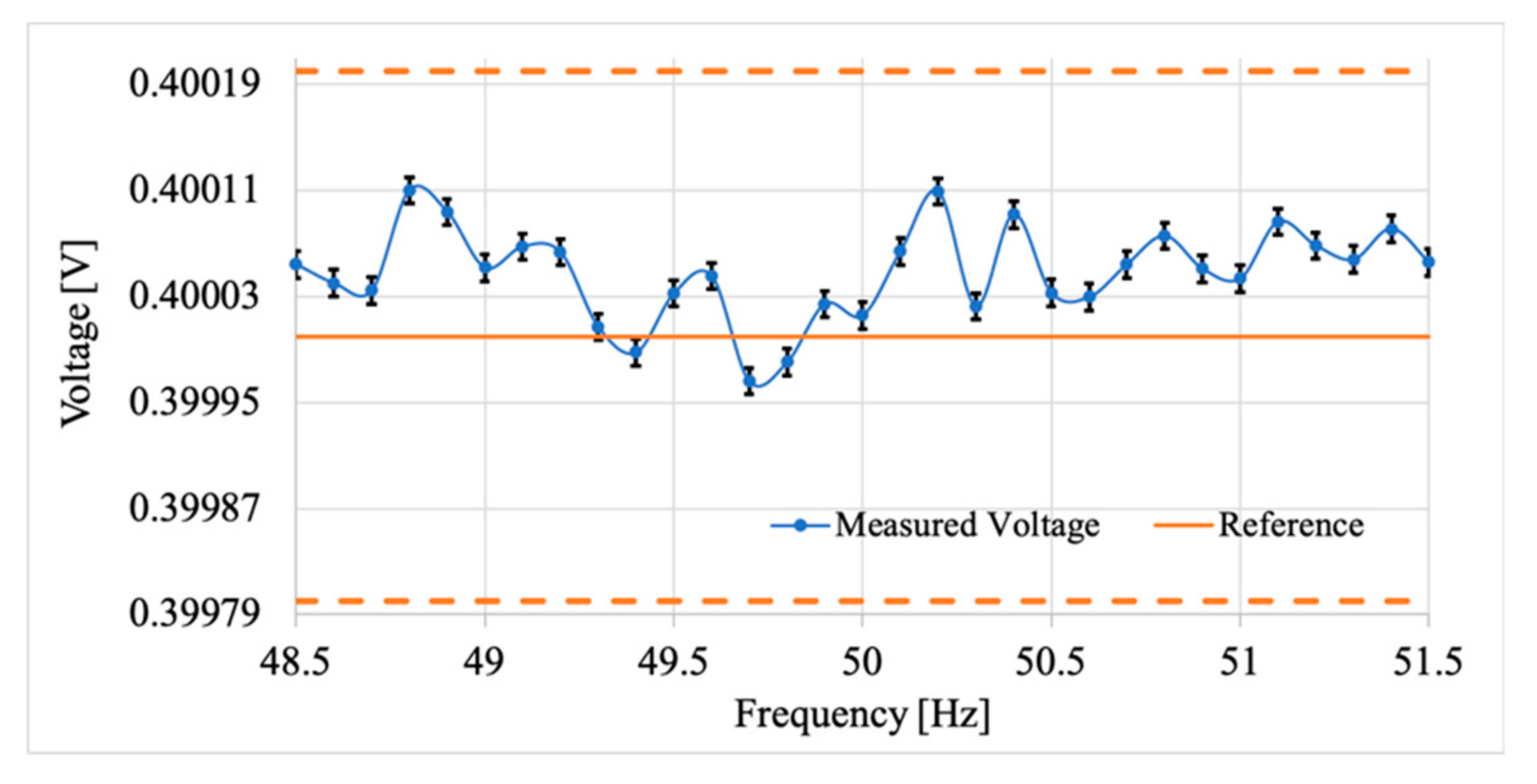
4.2. Calibrator + LPIT + PMU Tests Results
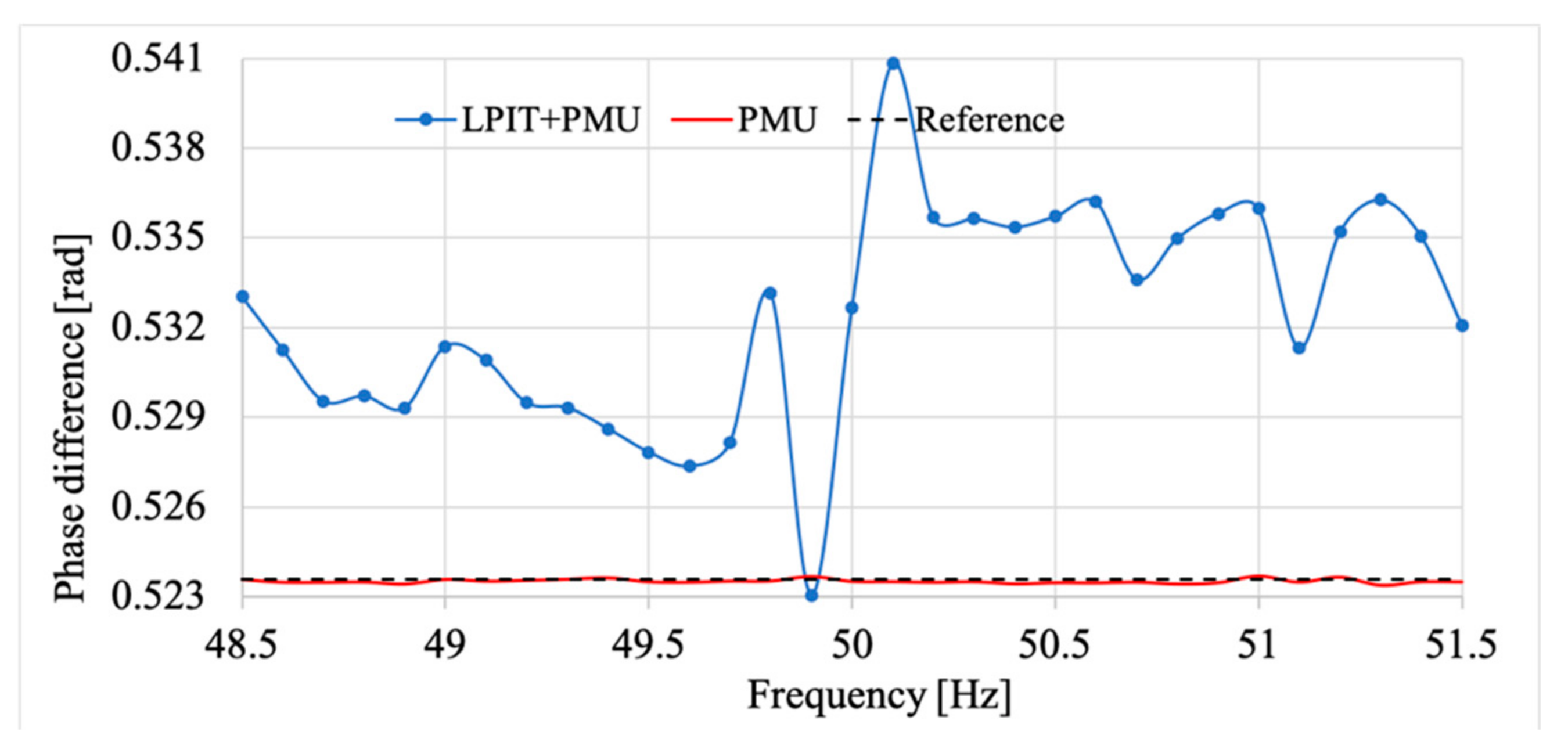
4.3. Frequency and Phase Tests Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Monti, A.; Muscas, C.; Ponci, F. Phasor Measurement Units and Wide Area Monitoring Systems; Elsevier Science & Technology: London, UK, 2016. [Google Scholar]
- Muscas, C.; Sulis, S.; Angioni, A.; Ponci, F.; Monti, A. Impact of Different Uncertainty Sources on a Three-Phase State Estimator for Distribution Networks. IEEE Trans. Instrum. Meas. 2014, 63, 2200–2209. [Google Scholar] [CrossRef]
- De Din, E.; Lipari, G.; Angioni, A.; Ponci, F.; Monti, A. Effect of the reporting rate of synchrophasor measurements for distributed secondary control of AC microgrid. In Proceedings of the 2017 IEEE International Workshop on Measurement and Networking (M&N), Naples, Italy, 27–29 September 2017; pp. 1–6. [Google Scholar]
- Angioni, A.; Lipari, G.; Pau, M.; Ponci, F.; Monti, A. A Low Cost PMU to Monitor Distribution Grids. In Proceedings of the 2017 IEEE International Workshop on Applied Measurements for Power Systems (AMPS), Liverpool, UK, 20–22 September 2017; pp. 1–6. [Google Scholar]
- IEEE Standard for Synchrophasor Measurements for Power Systems. In IEEE Std C37.118.1-2011 (Revision of IEEE Std C37.118-2005); IEEE: New York, NY, USA, 2011; pp. 1–61. [CrossRef]
- IEC. Communication Networks and Systems for Power Utility Automation; International Standardization Organization: Geneva, Switzerland, 2018. [Google Scholar]
- IEC. Instrument Transformers—Part 10: Specific Requirements for Low-Power Passive Current Transformers; International Standardization Organization: Geneva, Switzerland, 2017. [Google Scholar]
- IEC. Instrument Transformers—Part 11: Additional Requirements for Low-Power Passive Voltage Transformers; International Standardization Organization: Geneva, Switzerland, 2016. [Google Scholar]
- Mingotti, A.; Peretto, L.; Tinarelli, R.; Yigit, K. Simplified Approach to Evaluate the Combined Uncertainty in Measurement Instruments for Power Systems. IEEE Trans. Instrum. Meas. 2017, 66, 2258–2265. [Google Scholar] [CrossRef] [Green Version]
- IEC. Instrument Transformers—Part 1: General Requirements; International Standardization Organization: Geneva, Switzerland, 2011. [Google Scholar]
- Gentilini, I.; Calone, R.; Giammanco, F.; Bolcato, G.; Weichold, J.; Stalder, M. The smart termination: An innovative component to enable Smart Grids development. In Proceedings of the 22nd International Conference and Exhibition on Electricity Distribution (CIRED), Stockholm, Sweden, 10–13 June 2013. [Google Scholar]
- Kamwa, I.; Samantaray, S.; Joos, G. On the accuracy versus transparency trade-off of data-mining models for fast-response PMU-based catastrophe predictors. In Proceedings of the IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013. [Google Scholar]
- Singh, R.S.; Hooshyar, H.; Vanfretti, L. Laboratory test set-up for the assessment of PMU time synchronization requirements. In Proceedings of the IEEE Eindhoven Power Tech, Eindhoven, The Netherlands, 29 June–2 July 2015. [Google Scholar]
- Ghosh, P.G. Complete and incomplete PMU observability for hybrid state estimation. In Proceedings of the International Conference on Computation of Power, Energy Information and Communication, Melmaruvathur, India, 22–23 March 2017. [Google Scholar]
- Tong, Y.; Liu, B.; Deng, X.; Wang, Y. The experimental study on the electronic instrument transformer harmonic accuracy. In Proceedings of the China International Conference on Electricity Distribution, Shenzhen, China, 23–26 September 2014. [Google Scholar]
- Kaczmarek, M.; Nowicz, R. Simulation of the influence of conductive disturbances on accuracy of the voltage transformers during measurements of the power quality. In Proceedings of the 10th International Conference on Electrical Power Quality and Utilisation, Lodz, Poland, 15–17 September 2009. [Google Scholar]
- Slomovitz, D. Electronic system for increasing the accuracy of in-service instrument-current transformers. IEEE Trans. Instrum. Meas. 2003, 52, 408–410. [Google Scholar] [CrossRef]
- Mingotti, A.; Peretto, L.; Tinarelli, R. An equivalent synchronization for phasor measurements in power networks. In Proceedings of the Workshop on Applied Measurements for Power Systems, Liverpool, UK, 20–22 September 2017. [Google Scholar]
- Ortiz, G.A.; Colomé, D.G.; Puma, J.J.Q. State estimation of power system based on SCADA and PMU measurements. In Proceedings of the 2016 IEEE ANDESCON, Arequipa, Peru, 19–21 October 2016. [Google Scholar]
- Mingotti, A.; Peretto, L.; Tinarelli, R.; Angioni, A.; Monti, A.; Ponci, F. Calibration of Synchronized Measurement System: From the Instrument Transformer to the PMU. In Proceedings of the 2018 IEEE 9th International Workshop on Applied Measurements for Power Systems (AMPS), Bologna, Italy, 26–28 September 2018. [Google Scholar]
- Asprou, M.; Kyriakides, E.; Albu, M. The effect of PMU measurement chain quality on line parameter calculation. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference, Turin, Italy, 22–25 May 2017. [Google Scholar]
- Singh, R.S.; Cobben, S.; Gibescu, M. Assessment of errors in the measurement chain of distribution grids feasibility study of a PMU application. In Proceedings of the First International Colloquium on Smart Grid Metrology, Split, Croatia, 24–27 April 2018. [Google Scholar]
- Tuttelberg, K.; Kilter, J. Uncertainty propagation in PMU-based trasmission line monitoring. IET Gener. Transm. Distrib. 2018, 12, 745–755. [Google Scholar] [CrossRef]
- Wu, Z.; Thomas, K.; Sun, R.; Centeno, V.A.; Phadke, A.G. Three-phase instrument transformer calibration with synchronized phasor measurements. In Proceedings of the IEEE PES Innovative Smart Grid Technologies, Washington, DC, USA, 16–20 January 2012. [Google Scholar]
- Bi, T.; Liu, H.; Zhou, X.; Yang, Q. Impact of transient response of instrument transformers on phasor measurements. In Proceedings of the IEEE PES General Meeting, Providence, RI, USA, 25–29 July 2010. [Google Scholar]
- Pegoraro, P.A.; Castello, P.; Muscas, C.; Brady, K.; Von Meier, A. Handling Instrument Transformers and PMU Errors for the Estimation of Line Parameters in Distribution Grids. In Proceedings of the IEEE International Workshop on Applied Measurements for Power Systems, Liverpool, UK, 20–22 September 2017. [Google Scholar]
- Hou, S.; Xu, Z.; Lv, H.; Jiang, Z.; Lingyi, W. Research into Harmonic State Estimation in Power System Based on PMU and SVD. In Proceedings of the International Conference on Power System Technology, Chongqing, China, 22–26 October 2006. [Google Scholar]
- Chakir, M.; Kamwa, I.; Le Huy, H. Extended C37.118.1 PMU Algorithms for joint tracking of fundamental and harmonic phasors in stressed power systems and microgrids. IEEE Trans. Power Deliv. 2014, 29, 1465–1480. [Google Scholar] [CrossRef]
- Melo, I.D.; Pereira, J.L.R.; Variz, A.M.; Oliveira, B.C. A PMU-based distribution system harmonic state estimation using parallel processing. In Proceedings of the IEEE International Conference on Harmonics and Quality of Power, Belo Horizonte, Brazil, 16–19 October 2016. [Google Scholar]
- Dixit, A.; Kaur, M. Harmonic source identification with optimal placement of PMUs. In Proceedings of the IEEE International Conference on Power Electronics, Intelligent Control and Energy System, Delhi, India, 4–6 July 2016. [Google Scholar]
- Carta, A.; Locci, N.; Muscas, C. A PMU for the measurement of synchronized harmonic phasors in three-phase distribution networks. IEEE Trans. Instrum. Meas. 2009, 58, 3723–3730. [Google Scholar] [CrossRef]
- Wright, P.S.; Christensen, A.E.; Davis, P.N.; Lippert, T. Multiple-site amplitude and phase measurements of harmonics for analysis of harmonic propagation on Bornholm island. IEEE Trans. Instrum. Meas. 2017, 66, 1176–1183. [Google Scholar] [CrossRef]
- EN 50160:2011. Voltage Characteristics of Electricity Supplied by Public Electricity Networks; European Committee for Standardization: Brussels, Belgium, 2017. [Google Scholar]
- Aristoy, G.; Trigo, L.; Santos, A.; Brehm, M.; Slomovitz, D. Measuring system for calibrating high voltage instrument transformers at distorted waveforms. In Proceedings of the Conference on Precision Elctromagnetic Measurements, Ottawa, ON, Canada, 10–15 July 2016. [Google Scholar]
- Aristoy, G.; Trigo, L.; Santos, A.; Brehm, M.; Slomovitz, D. Behavior of current transformers under distorted waveforms. In Proceedings of the PES Innovative Smart Grid Technologies Latin America, Montevideo, Uruguay, 5–7 October 2015. [Google Scholar]
- Mingotti, A.; Peretto, L.; Tinarelli, R.; Zhang, J. Use of COMTRADE Fault Current Data to Test Inductive Current Transformers. In Proceedings of the Workshop on Metrology for Industry 4.0 and IoT, Naples, Italy, 4–6 June 2019. [Google Scholar]
- Pasini, G.; Peretto, L.; Roccato, P.; Sardi, A.; Tinarelli, R. Traceability of low-power voltage transformer for medium voltage application. IEEE Trans. Instrum. Meas. 2014, 63, 2804–2812. [Google Scholar] [CrossRef]
- Mingotti, A.; Peretto, L.; Tinarelli, R.; Ghaderi, A. Uncertainty sources analysis of a calibration system for the accuracy vs. temperature verification of voltage transformers. J. Phys. 2018, 1065, 052041. [Google Scholar] [CrossRef] [Green Version]
- Mingotti, A.; Peretto, L.; Tinarelli, R. Low Power Voltage Transformer Accuracy Class Effects on the Residual Voltage Measurement. In Proceedings of the 2018 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Houston, TX, USA, 14–17 May 2018; pp. 1308–1313. [Google Scholar]
- Djokic, B.V.; Ramboz, J.D.; Destefan, D.E. To what extent can the current amplitude linearity of Rogowski coils be verified? IEEE Trans. Instrum. Meas. 2011, 60, 2409–2414. [Google Scholar] [CrossRef]
- Peretto, L.; Tinarelli, R. Procedure for the assessment of metrological characteristics of window-type current transformers in three-phase power systems. In Proceedings of the IEEE International Workshop on Applied Measurements for Power Systems, Aachen, Germany, 24–26 September 2014. [Google Scholar]
- Loper, M.; Salumae, U.; Kilter, J. Assessment of higher harmonics influence to PMU measurement accuracy. In Proceedings of the PES Innovative Smart Grid Technologies Conference Europe, Torino, Italy, 26–29 September 2017. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weight | 1.5 kg |
| Nominal current ratio | 1000 A/ 31 mV |
| Rated Primary Voltage | 20/ kV |
| Nominal Voltage ratio in/out | 10,000:1 |
| Rated primary current | 300 A |
| At Power Frequency Conditions | ||
|---|---|---|
| Range [V] | Accuracy (ppm + mV) | |
| 1–23 | 42 + 0.2 | |
| 70–1008 | 60 + 10 | |
| Range [A] | Accuracy (% of output + % of range) | |
| 120 | 0.009 + 0.002 | |
| Frequency | Accuracy (ppm) | |
| Full range | 50 | |
| Phase | Accuracy | |
| Voltage full range | 0.005° | |
| Current full range | 0.003° | |
| With Harmonic Content | ||
| Range [V] | Frequency [Hz] | Accuracy (ppm + mV) |
| Full range | up to 850 | 60 + 33 |
| Over 850 | 450 + 10 | |
| Harmonic Order [-] | % of the Fundamental [%] | (±0.2 mV) [V] |
|---|---|---|
| 3 | 5.0 | 1.00125 |
| 5 | 6.0 | 1.00180 |
| 7 | 5.0 | 1.00125 |
| 9 | 1.5 | 1.00011 |
| 11 | 3.5 | 1.00061 |
| 13 | 3.0 | 1.00045 |
| 15 | 0.5 | 1.00001 |
| 17 | 2.0 | 1.00020 |
| 19 | 1.5 | 1.00011 |
| 21 | 0.5 | 1.00001 |
| 23 | 1.5 | 1.00011 |
| 25 | 1.5 | 1.00011 |
| #H | ROCOF [Hz/s] | ROCOFmax [Hz/s] | ROCOFmin [Hz/s] | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3 | 1.00022 | 3 | 1.00122 | 0.99943 | 49.99916 | 6 | 50.00037 | 49.99785 | 0.0025 | 2 | 0.0098 | 0.0000 |
| 5 | 1.00001 | 2 | 1.00064 | 0.99940 | 49.99922 | 6 | 50.00048 | 49.99752 | 0.0032 | 2 | 0.0084 | 0.0000 |
| 7 | 0.99975 | 3 | 1.00026 | 0.99904 | 49.99918 | 6 | 50.00067 | 49.99767 | 0.0035 | 1 | 0.0069 | 0.0005 |
| 9 | 1.00012 | 3 | 1.00071 | 0.99941 | 49.99922 | 5 | 50.00046 | 49.99795 | 0.00197 | 9 | 0.0038 | 0.0000 |
| 11 | 0.99991 | 3 | 1.00051 | 0.9992 | 49.99920 | 7 | 50.00092 | 49.99747 | 0.00086 | 5 | 0.0022 | 0.0000 |
| 13 | 1.00007 | 3 | 1.00065 | 0.99941 | 49.99931 | 6 | 50.0008 | 49.99718 | 0.0185 | 3 | 0.0261 | 0.0121 |
| 15 | 0.99999 | 2 | 1.00058 | 0.99936 | 49.99922 | 5 | 50.00038 | 49.9979 | 0.0172 | 4 | 0.0270 | 0.0083 |
| 17 | 0.99992 | 2 | 1.00046 | 0.99923 | 49.99915 | 6 | 50.00081 | 49.99810 | 0.0082 | 4 | 0.0164 | 0.0008 |
| 19 | 1.00011 | 3 | 1.00073 | 0.99934 | 49.99924 | 6 | 50.00043 | 49.99757 | 0.0017 | 1 | 0.0055 | 0.0000 |
| 21 | 0.99998 | 3 | 1.00058 | 0.99929 | 49.99933 | 6 | 50.00073 | 49.99735 | 0.00097 | 5 | 0.00243 | 0.00001 |
| 23 | 1.00006 | 2 | 1.00055 | 0.99951 | 49.99919 | 6 | 50.00073 | 49.99757 | 0.01478 | 8 | 0.01681 | 0.01290 |
| 25 | 0.99998 | 2 | 1.00060 | 0.99945 | 49.99911 | 6 | 50.00042 | 49.99774 | 0.0164 | 3 | 0.0231 | 0.0078 |
| #H | ROCOF [Hz/s] | ROCOFmax [Hz/s] | ROCOFmin [Hz/s] | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3 | 935.8 | 0.2 | 938.3 | 932.4 | 100.352 | 5 | 100.469 | 100.274 | 0.00227 | 6 | 0.00484 | 0.00105 |
| 5 | 934.3 | 0.2 | 938.9 | 931.9 | 100.412 | 4 | 100.486 | 100.304 | 0.00135 | 7 | 0.00507 | 0.00014 |
| 7 | 937.5 | 0.2 | 939.8 | 932.8 | 100.352 | 3 | 100.433 | 100.285 | 0.00546 | 7 | 0.0163 | 0.0000 |
| 9 | 935.1 | 0.2 | 938.8 | 931.4 | 100.344 | 6 | 100.450 | 100.260 | 0.01878 | 2 | 0.0259 | 0.0153 |
| 11 | 935.0 | 0.2 | 939.0 | 931.5 | 100.357 | 6 | 100.470 | 100.244 | 0.01922 | 1 | 0.0222 | 0.0123 |
| 13 | 936.2 | 0.2 | 939.3 | 932.2 | 100.343 | 6 | 100.462 | 100.245 | 0.01790 | 2 | 0.0209 | 0.0114 |
| 15 | 934.0 | 0.2 | 937.8 | 930.6 | 100.381 | 7 | 100.481 | 100.262 | 0.01214 | 1 | 0.0178 | 0.0090 |
| 17 | 934.4 | 0.1 | 937.6 | 931.3 | 100.383 | 2 | 100.462 | 100.313 | 0.00217 | 1 | 0.0055 | 0.0002 |
| 19 | 935.4 | 0.3 | 939.3 | 931.8 | 100.348 | 6 | 100.455 | 100.238 | 0.00213 | 7 | 0.00406 | 0.00006 |
| 21 | 935.4 | 0.2 | 938.7 | 932.8 | 100.332 | 3 | 100.388 | 100.260 | 0.00108 | 5 | 0.00360 | 0.00002 |
| 23 | 936.3 | 0.2 | 940.2 | 933.3 | 100.325 | 3 | 100.387 | 100.264 | 0.01444 | 2 | 0.0169 | 0.0003 |
| 25 | 935.7 | 0.2 | 938.6 | 933.1 | 100.329 | 4 | 100.409 | 100.244 | 0.01726 | 2 | 0.0210 | 0.0134 |
| Setup | Tests vs. Frequency | Tests vs. Harmonics | ||
|---|---|---|---|---|
| k [%] | [%] | k [%] | [%] | |
| PMU | −0.0015 | 0.0147 | −0.0015781 | 0.0114 |
| LPIT + PMU | −0.0082 | 1.2668 | −0.0127069 | 0.2058 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mingotti, A.; Peretto, L.; Tinarelli, R.; Angioni, A.; Monti, A.; Ponci, F. A Simple Calibration Procedure for an LPIT plus PMU System Under Off-Nominal Conditions. Energies 2019, 12, 4645. https://doi.org/10.3390/en12244645
Mingotti A, Peretto L, Tinarelli R, Angioni A, Monti A, Ponci F. A Simple Calibration Procedure for an LPIT plus PMU System Under Off-Nominal Conditions. Energies. 2019; 12(24):4645. https://doi.org/10.3390/en12244645
Chicago/Turabian StyleMingotti, Alessandro, Lorenzo Peretto, Roberto Tinarelli, Andrea Angioni, Antonello Monti, and Ferdinanda Ponci. 2019. "A Simple Calibration Procedure for an LPIT plus PMU System Under Off-Nominal Conditions" Energies 12, no. 24: 4645. https://doi.org/10.3390/en12244645
APA StyleMingotti, A., Peretto, L., Tinarelli, R., Angioni, A., Monti, A., & Ponci, F. (2019). A Simple Calibration Procedure for an LPIT plus PMU System Under Off-Nominal Conditions. Energies, 12(24), 4645. https://doi.org/10.3390/en12244645