Evaluation of Optimization-Based EV Charging Scheduling with Load Limit in a Realistic Scenario


Abstract
:1. Introduction
2. Scenario
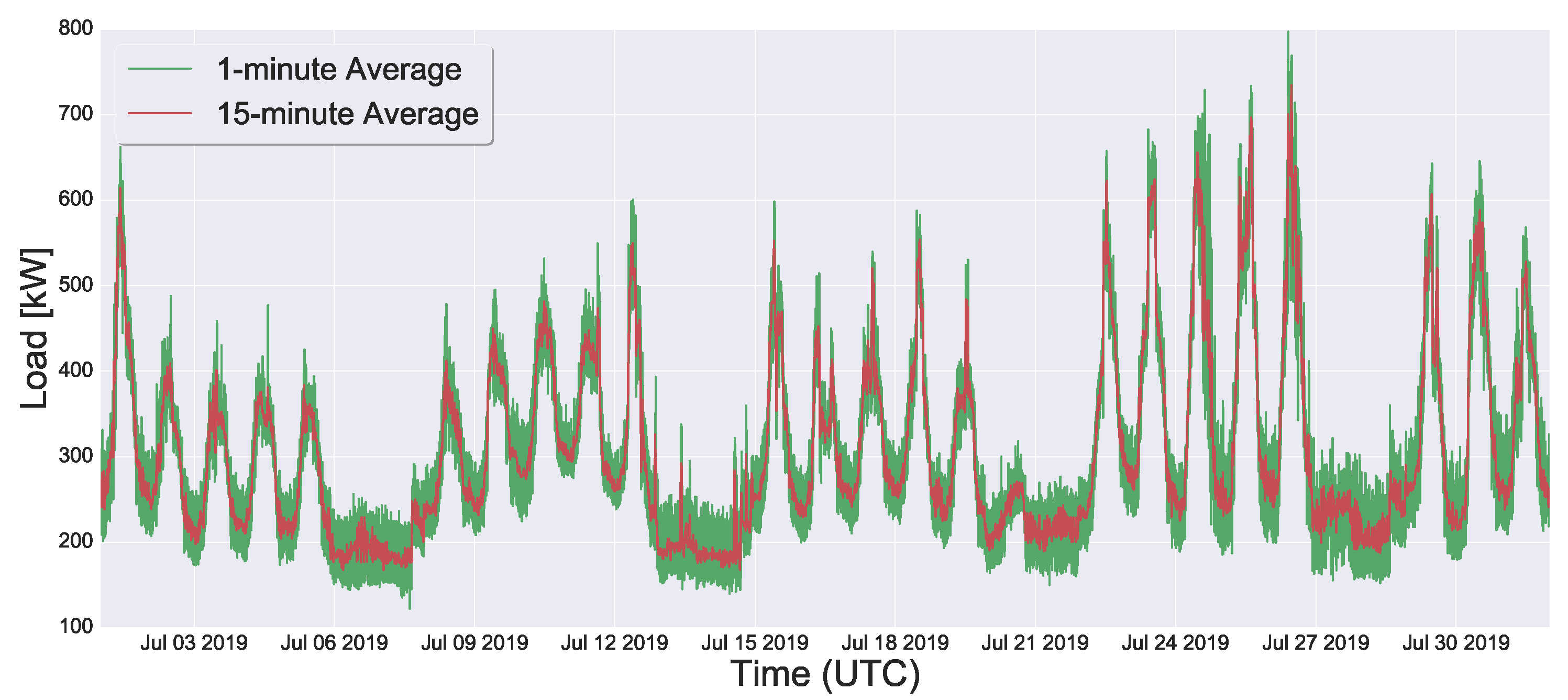
- The 30 previous 5-min average load values
- The index of the first time step to predict within the corresponding day
- The index of the weekday of the first time step to predict, from 0 to 6 or 7 if the day is a national holiday
- The index of the weekday of the last time step to predict, or 7 if the day is a national holiday
- The 5 previous 5-min average wetbulb temperature values
3. Controllers
3.1. Rule-Based Control
| Algorithm 1: Distribution of allowed charging power to N plugged-in EVs according CTL2 |
| Data: Charging power limit , Number N of plugged in EVs, maximum charging power , battery capacity and charge level of all plugged in EVs n Result: Charging powers for all plugged in EVs n  |
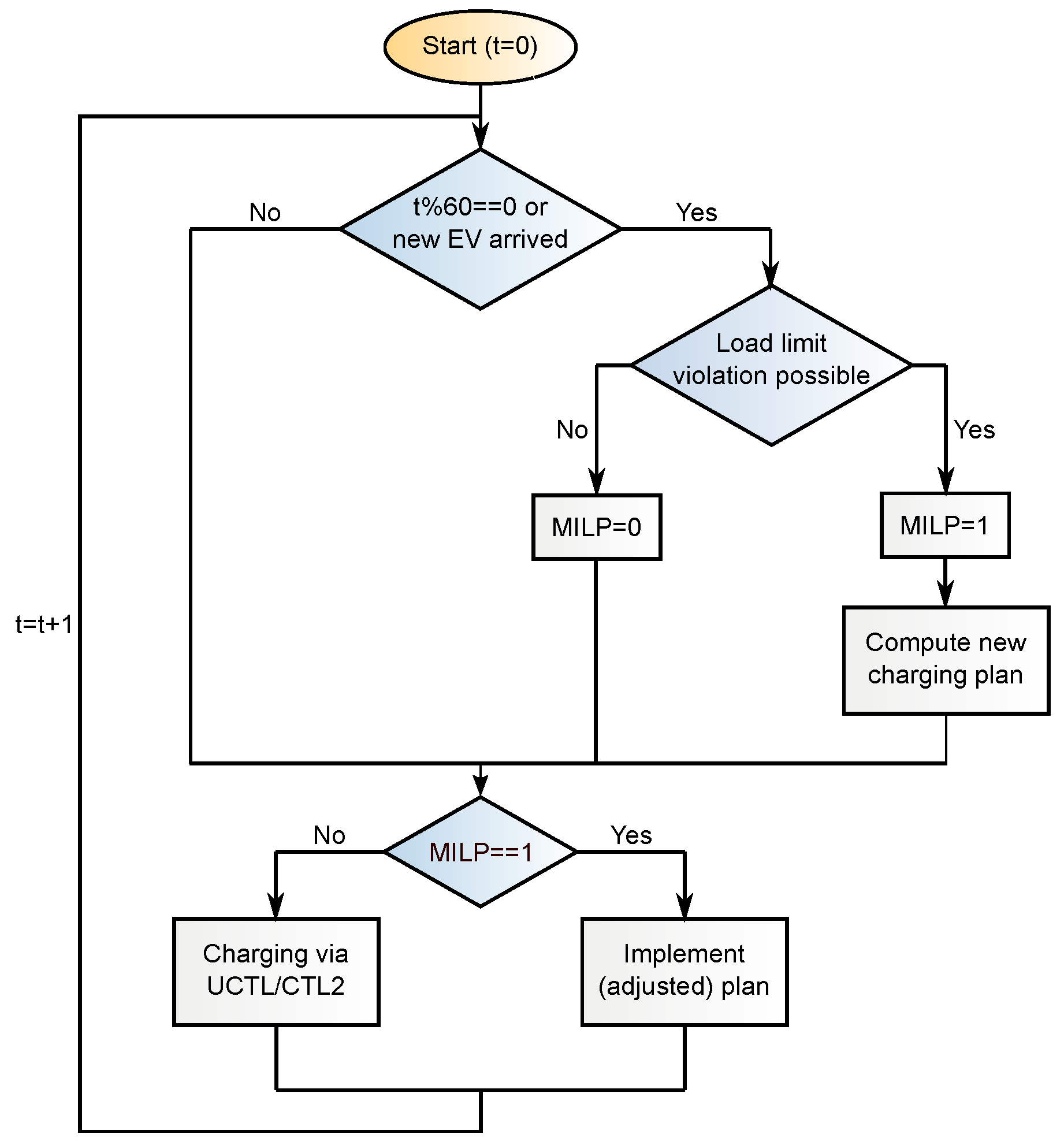
3.2. MILP-Based Control
3.3. MIQP-Based Control
4. Simulation Experiments
4.1. Experimental Setup
4.2. Experimental Results
5. Conclusions
Funding
Conflicts of Interest
References
- Chen, N.; Tan, C.W.; Quek, T.Q.S. Electric Vehicle Charging in Smart Grid: Optimality and Valley-Filling Algorithms. IEEE J. Sel. Top. Signal Process. 2014, 8, 1073–1083. [Google Scholar] [CrossRef]
- Zhang, G.; Tan, S.T.; Wang, G.G. Real-Time Smart Charging of Electric Vehicles for Demand Charge Reduction at Non-Residential Sites. IEEE Trans. Smart Grid 2018, 9, 4027–4037. [Google Scholar] [CrossRef]
- Gjelaj, M.; Træholt, C.; Hashemi, S.; Andersen, P.B. Cost-benefit Analysis of a Novel DC Fast-charging Station with a Local Battery Storage for EVs. In Proceedings of the 2017 52nd International Universities Power Engineering Conference (UPEC), Crete, Greece, 28–31 August 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Gjelaj, M.; Træholt, C.; Hashemi, S.; Andersen, P.B. DC Fast-charging Stations for EVs Controlled by a Local Battery Storage in Low Voltage Grids. In Proceedings of the 2017 IEEE Manchester PowerTech, Manchester, UK, 18–22 June 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Wang, S. Grid Power Peak Shaving and Valley Filling Using Vehicle-to-Grid Systems. IEEE Trans. Power Deliv. 2013, 28, 1822–1829. [Google Scholar] [CrossRef]
- Alam, M.J.E.; Muttaqi, K.M.; Sutanto, D. A Controllable Local Peak Shaving Strategy for Effective Utilization of PEV Battery Capacity for Distribution Network Support. In Proceedings of the 2014 IEEE Industry Application Society Annual Meeting, Vancouver, BC, Canada, 5–9 October 2014; pp. 1–8. [Google Scholar] [CrossRef]
- Kaur, K.; Dua, A.; Jindal, A.; Kumar, N.; Singh, M.; Vinel, A. A Novel Resource Reservation Scheme for Mobile PHEVs in V2G Environment Using Game Theoretical Approach. IEEE Trans. Veh. Technol. 2015, 64, 5653–5666. [Google Scholar] [CrossRef]
- Gan, L.; Topcu, U.; Low, S.H. Optimal Decentralized Protocol for Electric Vehicle Charging. IEEE Trans. Power Syst. 2013, 28, 940–951. [Google Scholar] [CrossRef] [Green Version]
- Limmer, S.; Rodemann, T. Peak Load Reduction through Dynamic Pricing for Electric Vehicle Charging. Int. J. Electr. Power Energy Syst. 2019, 113, 117–128. [Google Scholar] [CrossRef]
- Flath, C.M.; Ilg, J.P.; Gottwalt, S.; Schmeck, H.; Weinhardt, C. Improving Electric Vehicle Charging Coordination Through Area Pricing. Transp. Sci. 2014, 48, 619–634. [Google Scholar] [CrossRef]
- Huang, J.; Gupta, V.; Huang, Y. Scheduling Algorithms for PHEV Charging in Shared Parking Lots. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 276–281. [Google Scholar] [CrossRef]
- Kuran, M.Ş.; Carneiro Viana, A.; Iannone, L.; Kofman, D.; Mermoud, G.; Vasseur, J.P. A Smart Parking Lot Management System for Scheduling the Recharging of Electric Vehicles. IEEE Trans. Smart Grid 2015, 6, 2942–2953. [Google Scholar] [CrossRef]
- Ottesen, S.Ø. Techno-Economic Models in Smart Grids: Demand Side Flexibility Optimization for Bidding and Scheduling Problems. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2017. [Google Scholar]
- Limmer, S. Dynamic Pricing for Electric Vehicle Chargin—A Literature Review. Energies 2019, 12, 3574. [Google Scholar] [CrossRef] [Green Version]
- Olson, R.S.; Bartley, N.; Urbanowicz, R.J.; Moore, J.H. Evaluation of a Tree-based Pipeline Optimization Tool for Automating Data Science. In Proceedings of the Genetic and Evolutionary Computation Conference, Denver, CO, USA, 20–24 July 2016; ACM: New York, NY, USA, 2016; pp. 485–492. [Google Scholar] [CrossRef] [Green Version]
- Olson, R.S.; Urbanowicz, R.J.; Andrews, P.C.; Lavender, N.A.; Kidd, L.C.; Moore, J.H. Automating Biomedical Data Science Through Tree-Based Pipeline Optimization. In Proceedings of the 19th European Conference on Applications of Evolutionary Computation, EvoApplications 2016, Porto, Portugal, 30 March–1 April 2016; pp. 123–137. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Limmer, S.; Batri, M.; Bäck, T.; Hoos, H.H.; Olhofer, M. Automated Machine Learning for Short-term Electric Load Forecasting. In Proceedings of the 2017 IEEE Symposium Series on Computational Intelligence (SSCI), Honolulu, HI, USA, 27 November–1 December 2017. in press. [Google Scholar]
- Gleixner, A.; Eifler, L.; Gally, T.; Gamrath, G.; Gemander, P.; Gottwald, R.L.; Hendel, G.; Hojny, C.; Koch, T.; Miltenberger, M.; et al. The SCIP Optimization Suite 5.0; Technical Report 17-61, ZIB, Takustr.7; ZIB: Berlin, Germany, 2017. [Google Scholar]
- Dronia, M.; Gallet, M. Field Test of Charging Management System for Electric Vehicle. In Proceedings of the CoFAT 2016—5th Conference on Future Automotive Technology, Fürstenfeld, Austria, 3–4 May 2016. [Google Scholar] [CrossRef]
- Korolko, N.; Sahinoglu, Z. Robust Optimization of EV Charging Schedules in Unregulated Electricity Markets. IEEE Trans. Smart Grid 2017, 8, 149–157. [Google Scholar] [CrossRef]
- Han, J.; Park, J.; Lee, K. Optimal Scheduling for Electric Vehicle Charging under Variable Maximum Charging Power. Energies 2017, 10, 933. [Google Scholar] [CrossRef]
- Mies, J.J.; Helmus, J.R.; Van den Hoed, R. Estimating the Charging Profile of Individual Charge Sessions of Electric Vehicles in The Netherlands. World Electr. Veh. J. 2018, 9, 17. [Google Scholar] [CrossRef] [Green Version]
- Rodemann, T.; Eckhardt, T.; Unger, R.; Schwan, T. Using Agent-Based Customer Modeling for the Evaluation of EV Charging Systems. Energies 2019, 12, 2858. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | D | |||||||
|---|---|---|---|---|---|---|---|---|
| Unit | - | s | kW | - | kW | kW | kWh | kWh |
| Value | 31 | 1 | 735 | 11.04 |
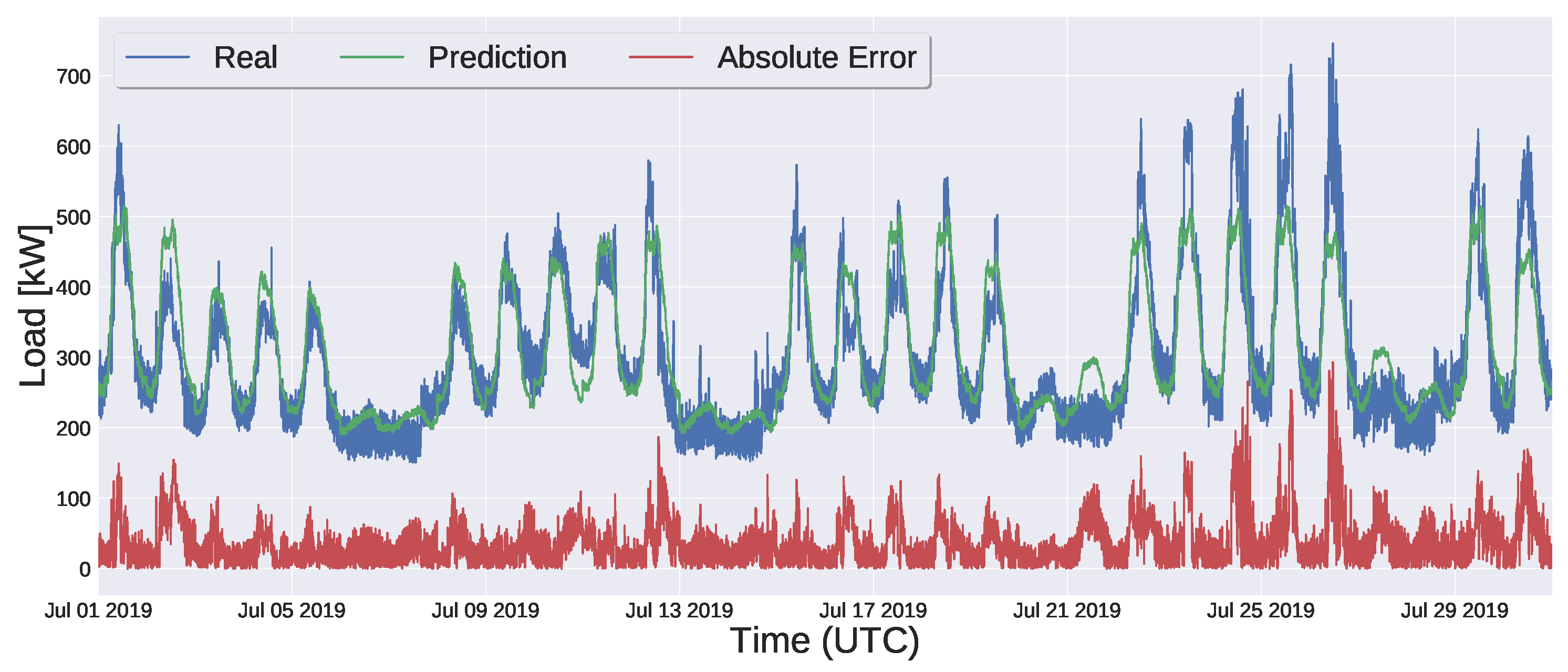
| Mean Absolute Error (kW) | Mean Percentage Error (%) | Root-Mean-Square Error (kW) |
|---|---|---|
| 36.6 | 11.8 | 50.4 |
| Peak Load (kW) | Unsatisfied Demand (kWh) | Lost Utility per EV | |
|---|---|---|---|
| UCTL | |||
| CTL1 | |||
| CTL2 | |||
| Peak Load (kW) | Unsatisfied Demand (kWh) | Lost Utility per EV | |
|---|---|---|---|
| UCTL | |||
| CTL1 | |||
| CTL2 | |||
| Peak Load (kW) | Unsatisfied Demand (kWh) | Lost Utility per EV | |
|---|---|---|---|
| UCTL | |||
| CTL1 | |||
| CTL2 | |||
| Peak Load (kW) | Unsatisfied Demand (kWh) | Lost Utility per EV | |
|---|---|---|---|
| UCTL | |||
| CTL1 | |||
| CTL2 | |||
| - | - | - | |
| - | - | - |
| , , kW | |||
| Peak Load (kW) | Unsatisfied Demand (kWh) | Lost utility per EV | |
| UCTL | |||
| CTL1 | |||
| CTL2 | |||
| , , kW | |||
| UCTL | |||
| CTL1 | |||
| CTL2 | |||
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Limmer, S. Evaluation of Optimization-Based EV Charging Scheduling with Load Limit in a Realistic Scenario. Energies 2019, 12, 4730. https://doi.org/10.3390/en12244730
Limmer S. Evaluation of Optimization-Based EV Charging Scheduling with Load Limit in a Realistic Scenario. Energies. 2019; 12(24):4730. https://doi.org/10.3390/en12244730
Chicago/Turabian StyleLimmer, Steffen. 2019. "Evaluation of Optimization-Based EV Charging Scheduling with Load Limit in a Realistic Scenario" Energies 12, no. 24: 4730. https://doi.org/10.3390/en12244730
APA StyleLimmer, S. (2019). Evaluation of Optimization-Based EV Charging Scheduling with Load Limit in a Realistic Scenario. Energies, 12(24), 4730. https://doi.org/10.3390/en12244730