Renewable Energy Sources and Battery Forecasting Effects in Smart Power System Performance

 , ,
, , 
Abstract
:1. Introduction
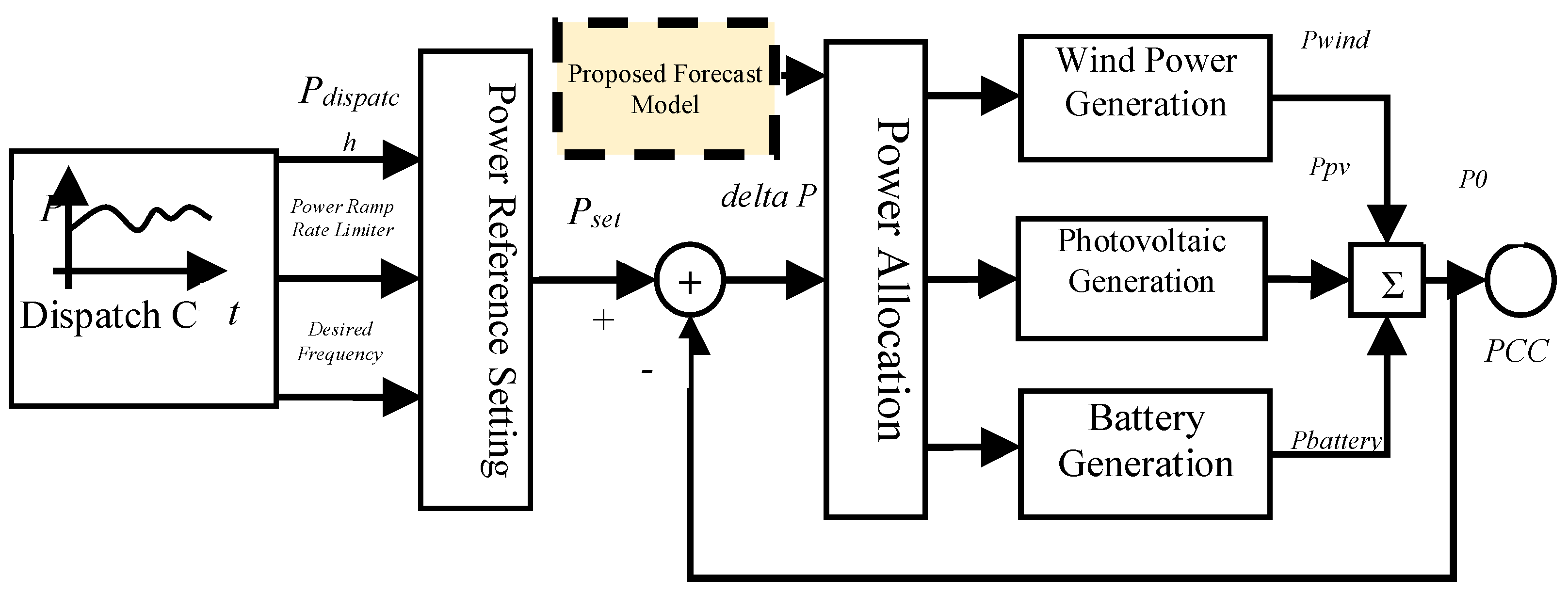
- In order to simulate battery behavior, a new method is proposed that is used in energy production systems in the presence of wind and solar sources.
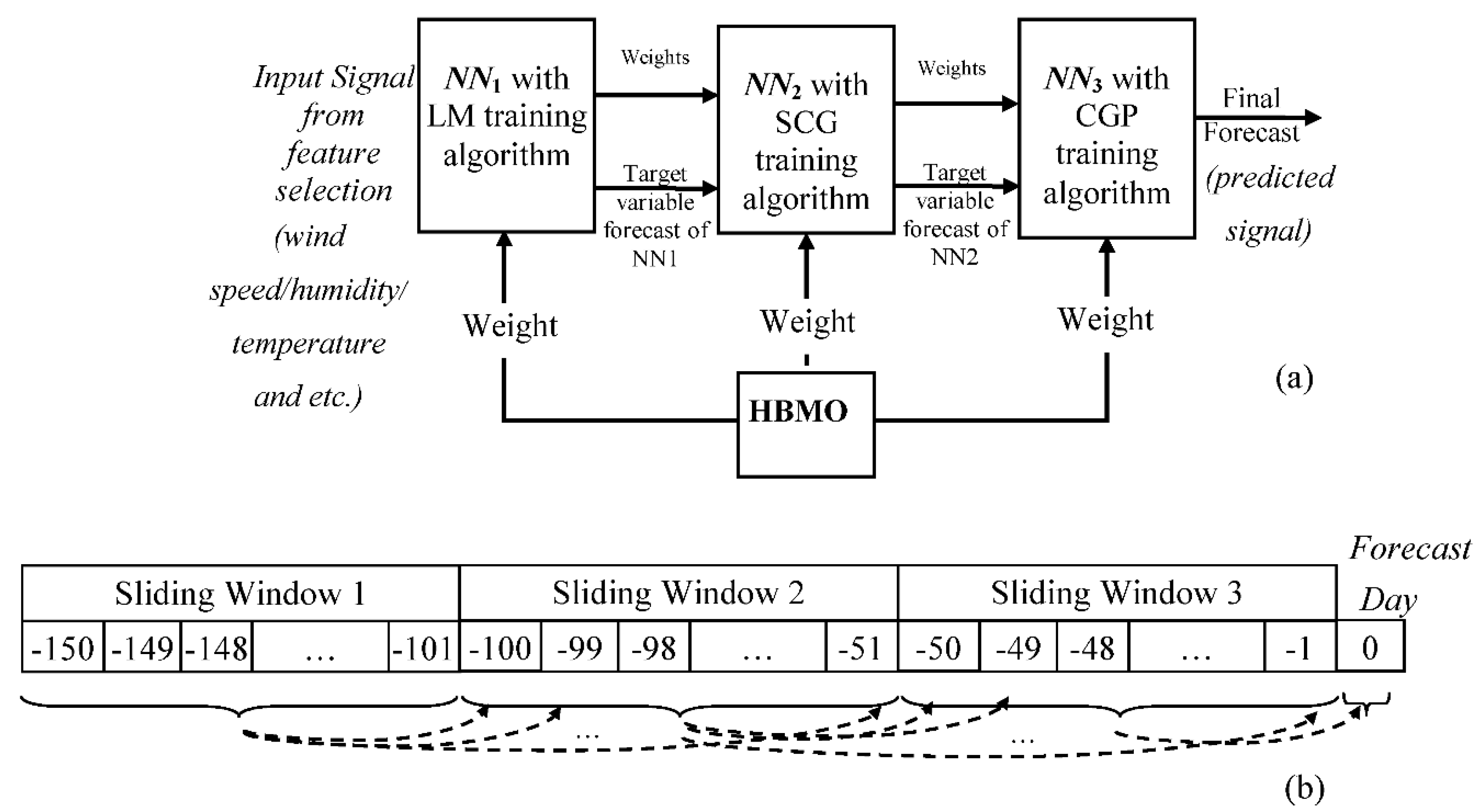
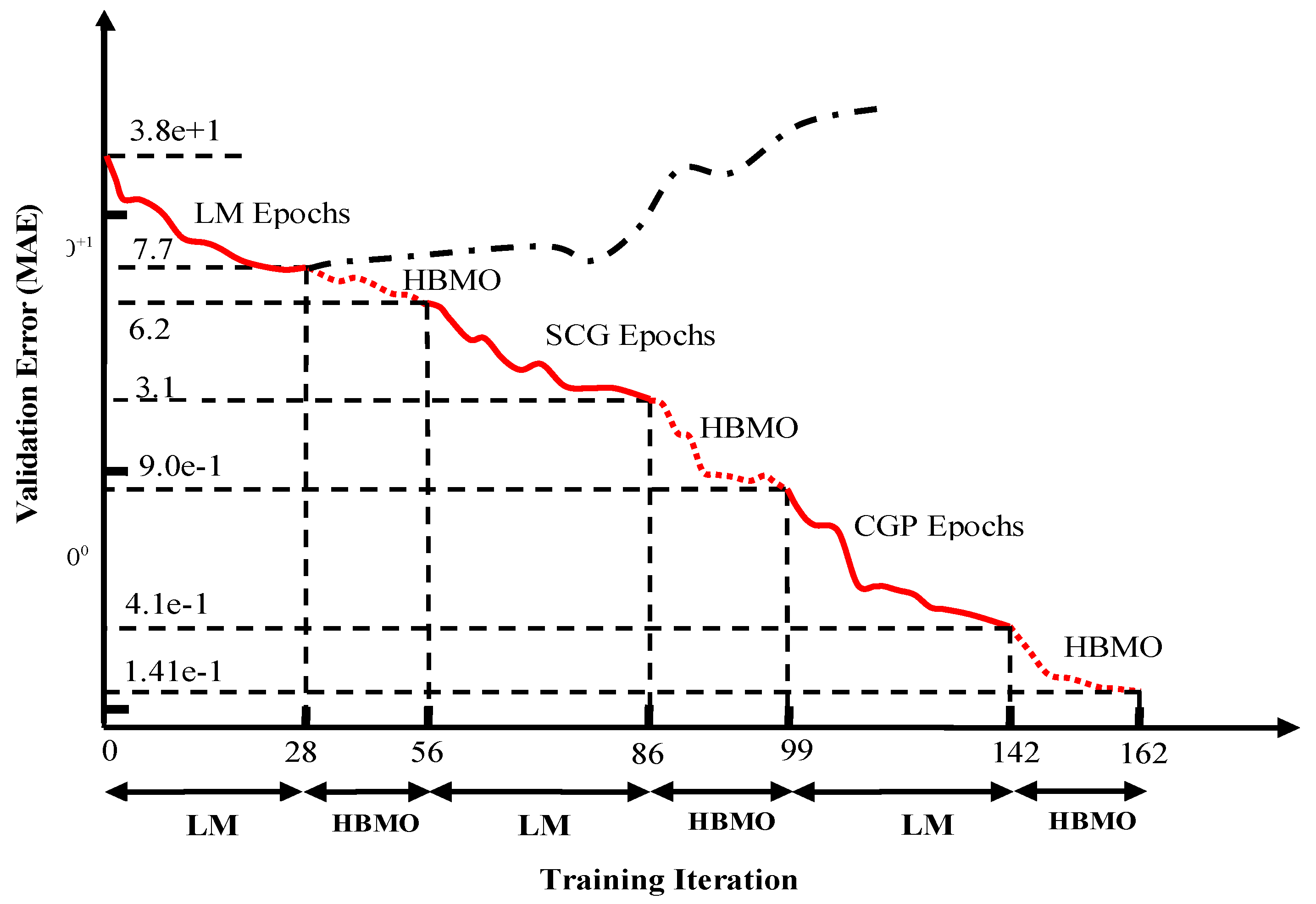
- A new optimization algorithm is proposed by combining the honey bee mating optimization (HBMO) algorithm and a new stochastic search technique. This algorithm is applied on a three stage forecast engine to set the optimal weight values in the prediction process.
2. Synthetic Wind-Solar and Battery Based Power System
2.1. Wind Power System Model
2.2. Solar System Model
2.3. Forecast Model for Battery Treatment
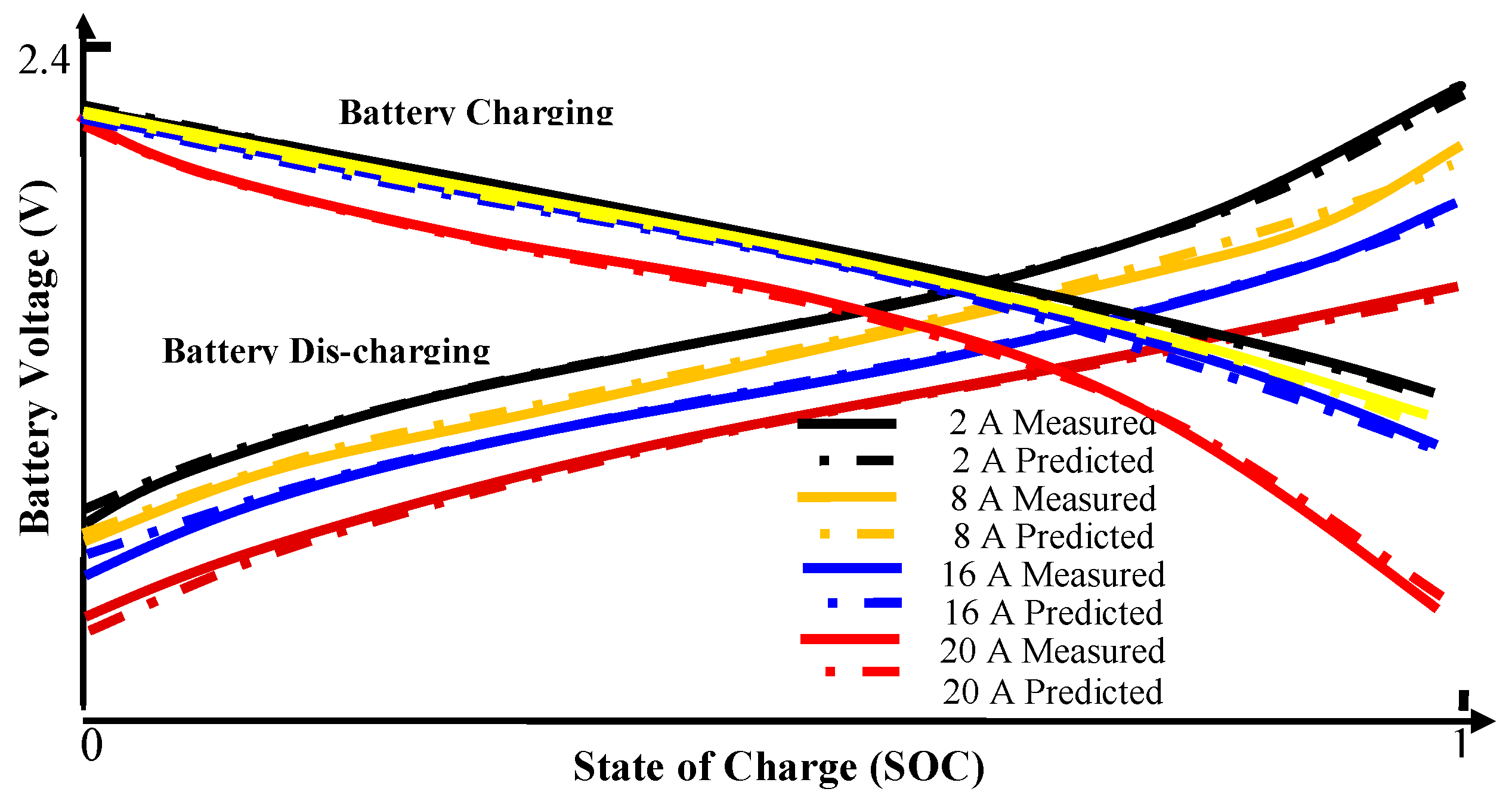
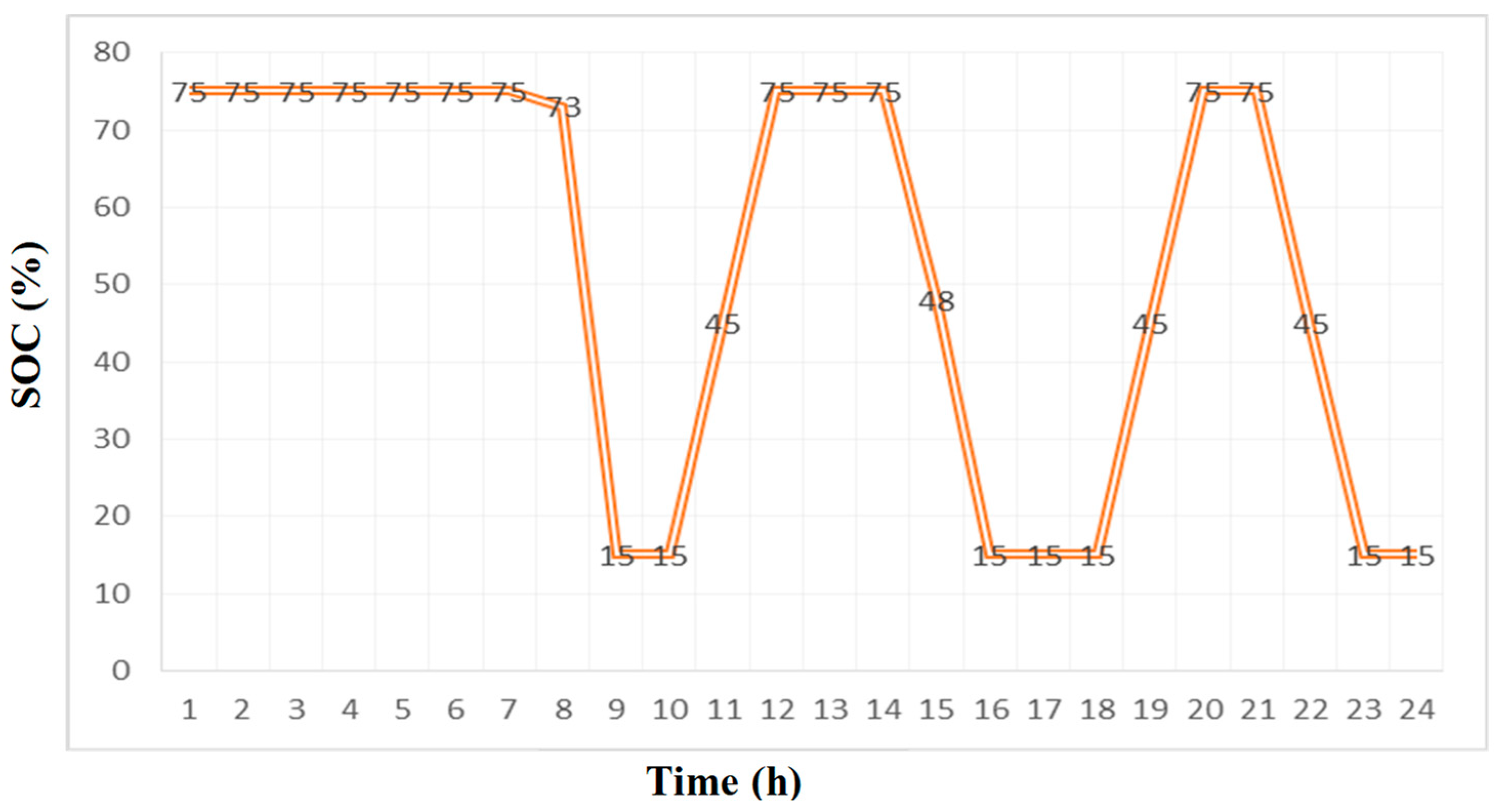
2.3.1. Battery State-of-Charge Model
2.3.2. Model of Battery Floating Charge Voltage
3. Short-Term Energy Forecasting for the Wind and PV System
Construction of the Forecast Engine
4. Numerical Analysis
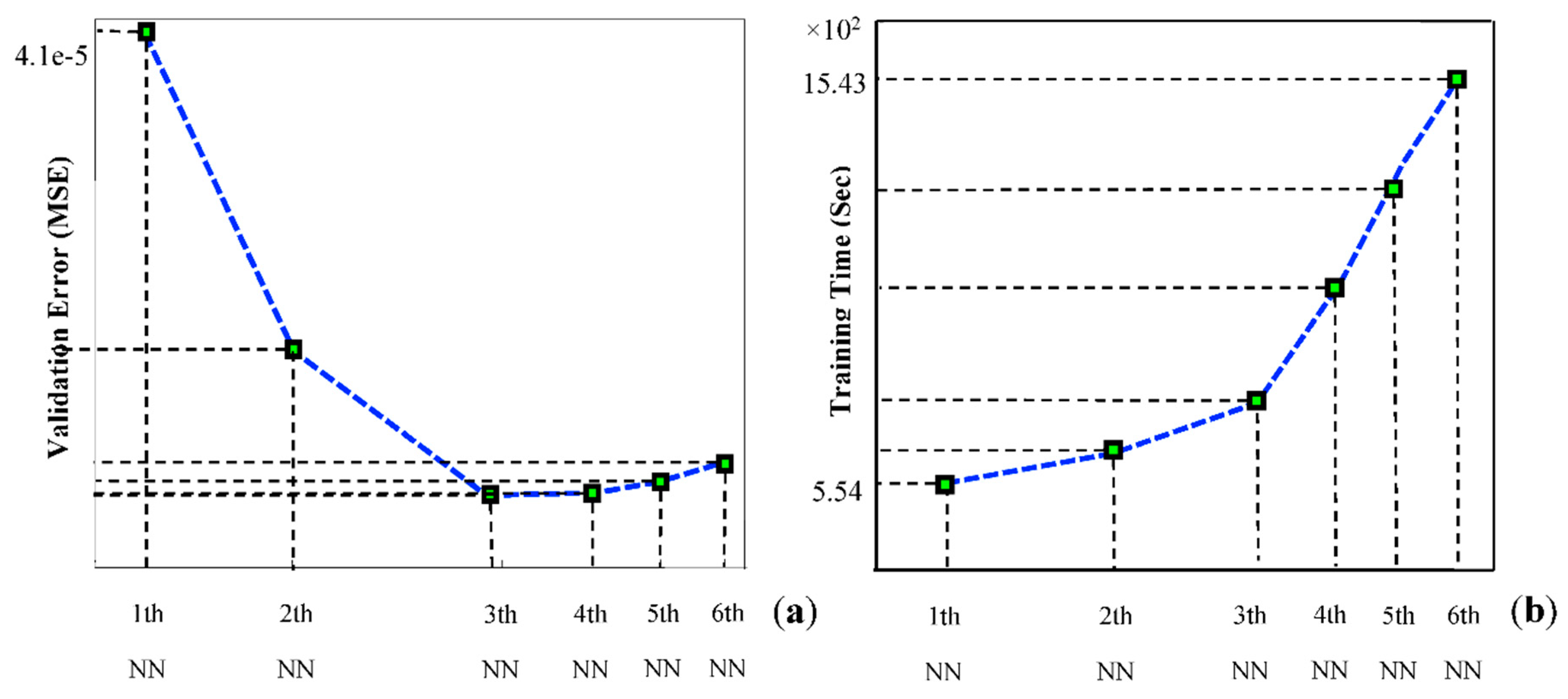
4.1. Training and Model Analysis
4.2. Obtained Results for the Forecast Engine
4.3. Test Cases in the Power System
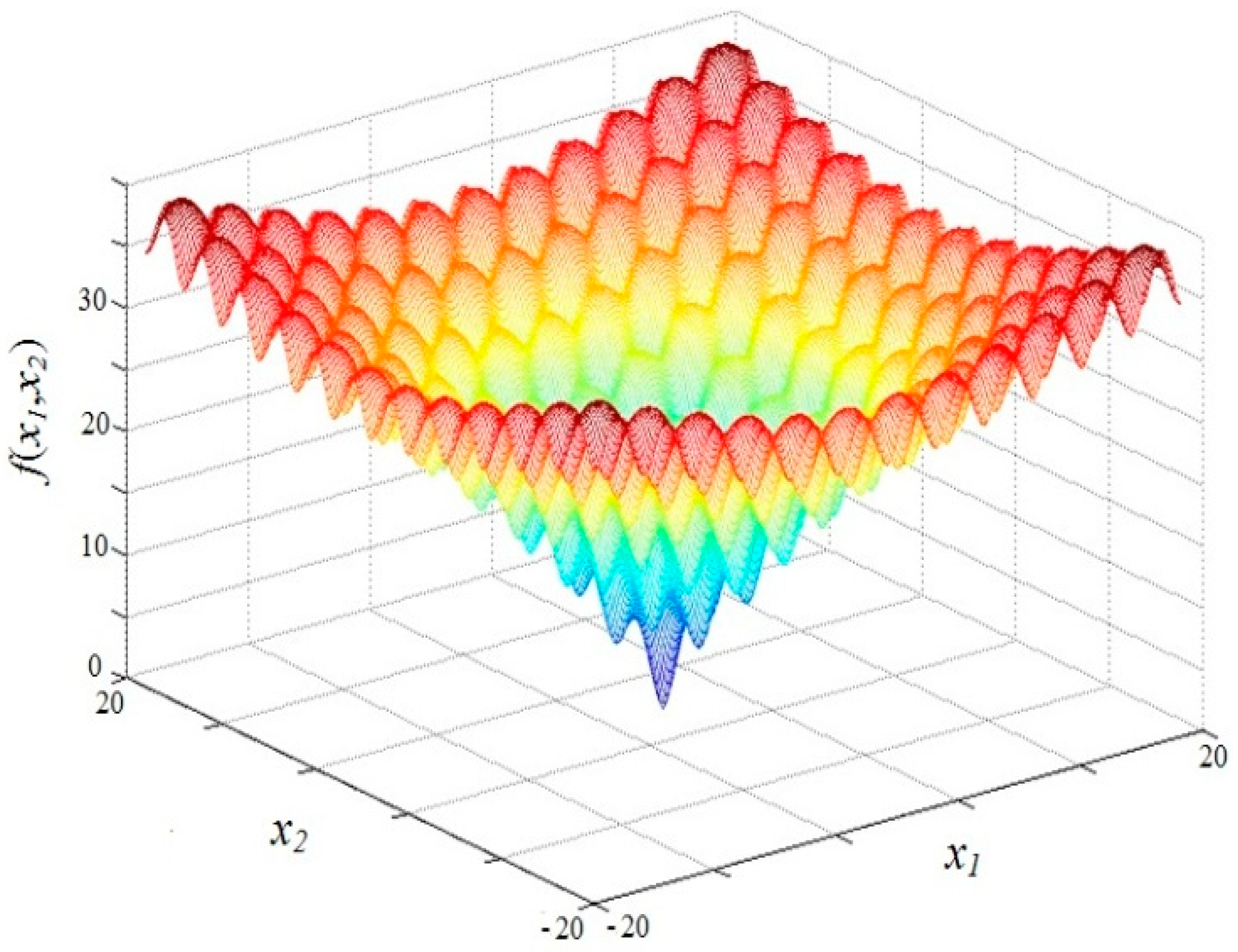
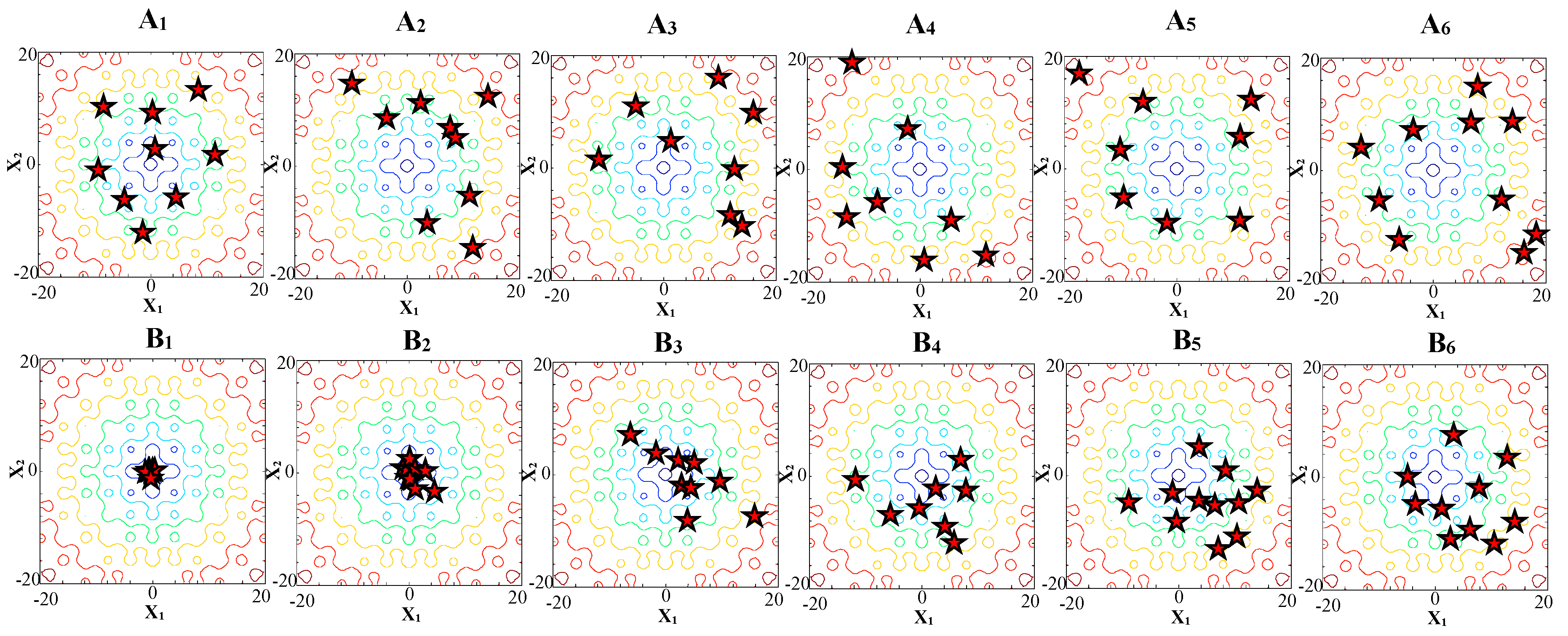
4.4. Optimization Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Manla, E.; Nasiri, A.; Rentel, C.H.; Hughes, M. Modeling of Zinc/Bromide Energy Storage for Vehicular Applications. IEEE Trans. Ind. Electron. 2010, 57, 624–632. [Google Scholar] [CrossRef]
- Wang, J.; Shahidehpour, M.; Li, Z. Security-constrained unit commitment with volatile wind power generation. IEEE Trans. Power Syst. 2008, 23, 1319–1327. [Google Scholar] [CrossRef]
- Ummels, B.C.; Gibescu, M.; Pelgrum, E.; Kling, W.L.; Brand, A.J. Impacts of wind power on thermal generation unit commitment and dispatch. IEEE Trans. Energy Convers. 2007, 22, 44–51. [Google Scholar] [CrossRef]
- Jiang, R.; Wang, J.; Guan, Y. Robust unit commitment with wind power and pumped storage hydro. IEEE Trans. Power Syst. 2012, 27, 800. [Google Scholar] [CrossRef]
- Teleke, S.; Baran, M.; Bhattacharya, S.; Huang, A. Optimal control of battery energy storage for wind farm dispatching. IEEE Trans. Energy Convers. 2010, 25, 787–794. [Google Scholar] [CrossRef]
- Mandal, P.; Madhira, S.T.S.; Haque, A.U.; Meng, J.; Pineda, R.L. Forecasting Power Output of Solar Photovoltaic System Using Wavelet Transform and Artificial Intelligence Techniques. Procedia Comput. Sci. 2012, 12, 332–337. [Google Scholar] [CrossRef] [Green Version]
- Abedinia, O.; Amjady, N.; Ghadimi, N. Solar energy forecasting based on hybrid neural network and improved metaheuristic algorithm. Comput. Intell. 2017, 34, 241–260. [Google Scholar] [CrossRef]
- Abedinia, O.; Raisz, O.; Amjady, N. An Effective Prediction Model for Hungarian Small-Scale Solar Power Output. IET Renew. Power Gener. 2017, 11, 1648–1658. [Google Scholar] [CrossRef]
- Bhangu, B.; Bentley, P.; Stone, D.; Bingham, C. Nonlinear observers for predicting state-of-charge and state-of-health of lead-acid batteries for hybrid-electric vehicles. IEEE Trans. Veh. Technol. 2005, 54, 783–794. [Google Scholar] [CrossRef]
- Rodrigues, E.M.G.; Godina, R.; Catalão, J.P.S. Modelling electrochemical energy storage devices in insular power network applications supported on real data. Appl. Energy 2017, 188, 315–329. [Google Scholar] [CrossRef]
- Medina, P.; Bizuayehu, A.W.; Catalão, J.P.; Rodrigues, E.M.; Contreras, J. Electrical energy storage systems: technologies’ state-of-the-art, techno-economic benefits and applications analysis. In Proceedings of the 2014 47th Hawaii International Conference on System Sciences (HICSS), Waikoloa, HI, USA, 6–9 January 2014; pp. 2295–2304. [Google Scholar]
- Rodrigues, E.M.G.; Godina, R.; Osório, G.J.; Lujano-Rojas, J.M.; Matias, J.C.O.; Catalão, J.P.S. Comparison of battery models for energy storage applications on insular grids. In Proceedings of the 2015 Australasian Universities Power Engineering Conference (AUPEC), Wollongong, Australia, 27–30 September 2015; pp. 1–6. [Google Scholar]
- Fan, G.F.; Wang, W.S.; Liu, C.; Dai, H.Z. Wind power prediction based on artificial neural network. Proc. CSEE 2008, 34, 118–123. [Google Scholar]
- Fang, K.; Mu, D.; Chen, S.; Wu, B.; Wu, F. A prediction model based on artificial neural network for surface temperature, simulation of nickel–metal hydride battery during charging. J. Power Sources 2012, 208, 378–382. [Google Scholar] [CrossRef]
- Weigert, T.; Tian, Q.; Lian, K. State-of-charge prediction of batteries and battery–supercapacitor hybrids using artificial neural networks. J. Power Sources 2011, 196, 4061–4066. [Google Scholar] [CrossRef]
- Bellows, R.J.; Grimes, P.; Einstein, H.; Kantner, E.; Malachesky, P.; Newby, K. Zinc-bromine battery design for electric vehicles. IEEE Trans. Vehicular Technol 1983, 32, 26–32. [Google Scholar] [CrossRef]
- Buller, S.; Thele, M.; Karden, E.; De Doncker, R. Impedancebased non-linear dynamic battery modeling for automotive applications. J. Power Sources 2003, 113, 422–430. [Google Scholar] [CrossRef]
- Moseley, P. High rate partial-state-of-charge operation of VRLA batteries. J. Power Sources 2004, 127, 27–32. [Google Scholar] [CrossRef]
- Zou, J.; Shu, J.; Zhang, Z.; Luo, W. An active power allocation method for wind-solar-batteries hybrid power system. Electr. Power Compon. Syst. 2014, 42, 1530–1540. [Google Scholar] [CrossRef]
- Zhou, W.; Yang, H.; Fang, Z. Battery behavior prediction and battery working states analysis of a hybrid solar–wind power generation system. Renew. Energy 2008, 33, 1413–1423. [Google Scholar] [CrossRef]
- Lee, D.T.; Shiah, S.J.; Lee, C.M.; Wang, Y.C. State-of-charge estimation for electric scooters by using learning mechanisms. IEEE Trans. Veh. Technol. 2007, 56, 544–556. [Google Scholar] [CrossRef]
- Kumar, S.; Ikkurti, H.P. Power electronic interface for energy management in battery ultracapacitor hybrid energy storage system. Electr. Power Compon. Syst. 2013, 41, 1059–1074. [Google Scholar] [CrossRef]
- Majumder, R.; Chakrabarti, S.; Ledwich, G.; Ghosh, A. Advanced battery storage control for an autonomous microgrid. Electr. Power Compon. Syst. 2013, 41, 157–181. [Google Scholar] [CrossRef]
- Shan, M.; Lai, Y.; Geng, J.; Zhang, K.; Gao, Z. Research on the Control Strategy of The Battery Energy Storage System in Wind Solar Battery Hybrid Generation Station. In Proceedings of the 18th IFAC (International Federation of Automatic Control) World Congress, Milan, Italy, 28 August–2 September 2011; pp. 14876–14880. [Google Scholar]
- Ghadimi, N.; Akbarimajd, A.; Shayeghi, H.; Abedinia, O. Application of New Hybrid Forecast Engine with Feature Selection Algorithm in Power System. Int. J. Ambient Energy 2017, 1–13. [Google Scholar] [CrossRef]
- Mohammadi, M.; Talebpour, F.; Safaee, E.; Ghadimi, N.; Abedinia, O. Small-scale building load forecast based on hybrid forecast engine. Neural Process. Lett. 2018, 48, 329–351. [Google Scholar] [CrossRef]
- Abedinia, O.; Amjady, N.; Zareipour, H. A New Feature Selection Technique for Load and Price Forecast of Electrical Power Systems. IEEE Trans. Power Syst. 2017, 32, 62–74. [Google Scholar] [CrossRef]
- Abedinia, O.; Amjady, N. Short Term Load Forecast of Electrical Power System by Radial Basis Function Neural Network and New Stochastic Search Algorithm. Eur. Trans. Electr. Power 2016, 26, 1511–1525. [Google Scholar] [CrossRef]
- Afshar, A.; Haddad, O.B.; Marino, M.A.; Adams, B.J. Honey-bee mating optimization (HBMO) algorithm for optimal reservoir operation. J. Frankl. Inst. 2007, 344, 452–462. [Google Scholar] [CrossRef]
- Fathian, M.; Amiri, B.; Maroosi, A. Application of honey-bee mating optimization algorithm on clustering. Appl. Math. Comput. 2007, 190, 1502–1513. [Google Scholar] [CrossRef]
- Niknam, T.; Mojarrad, H.D.; Meymand, H.Z.; Firouzi, B.B. A new honey bee mating optimization algorithm for non-smooth economic dispatch. Energy 2011, 36, 896–908. [Google Scholar] [CrossRef]
- Narasimhan, H. Parallel Artificial Bee Colony (PABC) Algorithm. In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 306–311. [Google Scholar]
- Hornby, G.S.; Pollack, J.B. Creating high-level components with a generative representation for body-brain evolution. Artif. Life 2002, 8, 223–246. [Google Scholar] [CrossRef]
- Zeng, X.J.; Tao, J.; Zhang, P.; Pan, H.; Wang, Y.Y. Reactive Power Optimization of Wind Farm based on Improved Genetic Algorithm. Energy Procedia 2011, 14, 1362–1367. [Google Scholar] [CrossRef]
- Price, K.V.; Rainer, S.; Jouni, L. Differential Evolution: A Practical Approach to Global Optimization; Springer: Berlin, Germany, 2005. [Google Scholar]
- Parpinelli, R.S.; Lopes, H.S.; Freitas, A.A. Data mining with an ant colony optimization algorithm. IEEE Trans. Evol. Comput. 2002, 6, 321–332. [Google Scholar] [CrossRef] [Green Version]
- Bagheri, M.; Nurmanova, V.; Abedinia, O.; Naderi, M.S.; Ghadimi, N.; Naderi, M.S. Impacts of Renewable Energy Sources by Battery Forecasting on Smart Power Systems. In Proceedings of the IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Error | Winter | Spring | Summer | Fall | ||||
|---|---|---|---|---|---|---|---|---|---|
| 23 December | 5 December | 12 May | 27 April | 26 June | 27 August | 18 October | 28 September | ||
| BPNN [6] | NMAPE | 29.65 | 35.47 | 18.55 | 23.45 | 21.05 | 18.67 | 15.17 | 32.74 |
| MAE | 1.08 | 1.47 | 1.56 | 1.98 | 1.88 | 1.35 | 0.81 | 2.01 | |
| RMSE | 1.92 | 2.15 | 2.04 | 2.73 | 2.20 | 1.86 | 0.96 | 2.68 | |
| RBFNN [6] | NMAPE | 16.71 | 35.46 | 17.24 | 18.21 | 10.84 | 5.12 | 7.22 | 21.86 |
| MAE | 0.61 | 1.47 | 1.45 | 1.54 | 0.94 | 0.37 | 0.38 | 1.34 | |
| RMSE | 0.74 | 1.72 | 1.94 | 2.20 | 1.43 | 0.45 | 0.49 | 1.80 | |
| WT + BPNN [6] | NMAPE | 11.94 | 30.26 | 16.99 | 17.95 | 17.62 | 5.98 | 13.07 | 22.44 |
| MAE | 0.43 | 1.25 | 1.44 | 1.51 | 1.54 | 0.43 | 0.70 | 1.38 | |
| RMSE | 0.62 | 1.66 | 1.70 | 1.89 | 2.05 | 0.55 | 0.79 | 1.52 | |
| WT + RBFNN [6] | NMAPE | 8.16 | 13.81 | 8.91 | 13.14 | 8.54 | 4.25 | 4.32 | 12.17 |
| MAE | 0.29 | 0.57 | 0.75 | 1.11 | 0.74 | 0.30 | 0.23 | 0.75 | |
| RMSE | 0.40 | 0.64 | 1.01 | 1.57 | 1.06 | 0.38 | 0.32 | 0.87 | |
| Proposed | NMAPE | 7.13 | 10.56 | 6.78 | 10.47 | 6.2 | 3.46 | 3.4 | 9.84 |
| MAE | 0.26 | 0.51 | 0.62 | 1 | 0.73 | 0.3 | 0.28 | 0.61 | |
| RMSE | 0.36 | 0.45 | 0.9 | 1.31 | 0.84 | 0.25 | 0.33 | 0.7 | |
| Index | EA | GA | DE | ACO | PSO | Proposed |
|---|---|---|---|---|---|---|
| MIN | 3.14 × 10−8 | 6.15 × 10−9 | 5.21 × 10−14 | 4.87 × 10−14 | 0.00 | 0.00 |
| MEAN | 2.031 | 0.583 | 5.02 × 10−1 | 5.09 × 10−1 | 3.05 × 10−1 | 1.53 × 10−2 |
| MAX | 4.182 | 4.361 | 1.572 | 8.54 × 10−1 | 7.30 × 10−1 | 5.81 × 10−2 |
| Func. | Best | Worst | Mean | Std. |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 |
| 2 | 0 | 0 | 0 | 0 |
| 3 | 0 | 6.316 | 1.20 × 10−1 | 8.82 × 10−1 |
| 4 | 0 | 0 | 0 | 0 |
| 5 | 0 | 0 | 0 | 0 |
| 6 | 0 | 9.83 | 7.87 | 3.92 |
| 7 | 8.00 × 10−5 | 23.5 | 1.31 × 10−3 | 4.11 × 10−3 |
| 8 | 14.0 | 2.50 × 10−2 | 20.0 | 8.71 × 10−2 |
| 9 | 1.6 | 4.5 | 3.21 | 0.721 |
| 10 | 0 | 3.11 × 10−2 | 1.02 × 10−2 | 8.72 × 10−3 |
| 11 | 0 | 0 | 0 | 0 |
| 12 | 1.2 | 5.04 | 3.02 | 0.952 |
| 13 | 1.01 | 8.34 | 3.11 | 1.62 |
| 14 | 0 | 0.521 | 3.20 × 10−4 | 1.10 × 10−3 |
| 15 | 1.90 × 102 | 4.21 × 102 | 3.21 × 102 | 1.10 × 102 |
| 16 | 0.23 | 1.1 | 0.43 | 0.123 |
| 17 | 10.0 | 11.2 | 14.2 | 0 |
| 18 | 11.2 | 35.0 | 13.1 | 1.32 |
| 19 | 0.22 | 0.321 | 0.241 | 4.20 × 10−2 |
| 20 | 1.32 | 2.11 | 2.01 | 0.231 |
| 21 | 3.43 × 102 | 3.80 × 102 | 3.80 × 102 | 0 |
| 22 | 2.11 × 10−6 | 20.3 | 3.21 | 5.31 |
| 23 | 1.11 × 102 | 5.33 × 102 | 4.09 × 102 | 1.40 × 102 |
| 24 | 1.02 × 102 | 2.04 × 102 | 2.00 × 102 | 13.0 |
| 25 | 1.00 × 102 | 2.04 × 102 | 2.00 × 102 | 0.431 |
| 26 | 1.00 × 102 | 2.02 × 102 | 1.03 × 102 | 24.1 |
| 27 | 3.00 × 102 | 3.04 × 102 | 3.00 × 102 | 1.18 × 10−9 |
| 28 | 3.00 × 102 | 3.04 × 102 | 3.00 × 102 | 0 |
| Func. | Best | Worst | Mean | Std. |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 |
| 2 | 1.22 × 103 | 4.10 × 104 | 8.00 × 103 | 6.41 × 103 |
| 3 | 0 | 1.20 × 103 | 34.1 | 1.51 × 102 |
| 4 | 5.33 × 10−7 | 0.12 | 1.51 × 10-4 | 2.42 × 10-4 |
| 5 | 0 | 0 | 0 | 0 |
| 6 | 0 | 22.1 | 0.434 | 2.41 |
| 7 | 0.412 | 22.1 | 3.44 | 4.21 |
| 8 | 20.1 | 21.0 | 20.6 | 1.31 × 10−5 |
| 9 | 21.2 | 30.3 | 23.3 | 1.21 |
| 10 | 1.30 × 10−2 | 0.165 | 5.45 × 10−2 | 2.31 × 10−2 |
| 11 | 0 | 0 | 0 | 0 |
| 12 | 11.6 | 31.2 | 21.3 | 3.13 |
| 13 | 21.6 | 73.0 | 43.4 | 11.1 |
| 14 | 0 | 0.101 | 2.32 × 10−2 | 1.41 × 10−2 |
| 15 | 2.14 × 103 | 3.20 × 103 | 2.51 × 103 | 2.10 × 102 |
| 16 | 6.54 × 10−2 | 1.11 | 0.841 | 0.1 |
| 17 | 10.2 | 23.2 | 25.2 | 2.40 × 10−15 |
| 18 | 23.2 | 83.4 | 66.1 | 2.32 |
| 19 | 0.652 | 1.32 | 1.20 | 1.30 × 10−2 |
| 20 | 5.41 | 11.3 | 10.1 | 2.30 × 10−2 |
| 21 | 2.00 × 102 | 4.12 × 102 | 2.52 × 102 | 32.1 |
| 22 | 10.1 | 1.03 × 102 | 7.52 × 102 | 13.1 |
| 23 | 2.11 × 103 | 3.34 × 103 | 3.21 × 102 | 23.1 |
| 24 | 2.00 × 102 | 2.23 × 102 | 2.00 × 102 | 4.31 |
| 25 | 2.00 × 102 | 2.43 × 102 | 2.31 × 102 | 14.1 |
| 26 | 2.00 × 102 | 3.01 × 102 | 2.01 × 102 | 12.0 |
| 27 | 3.00 × 102 | 6.34 × 102 | 3.40 × 102 | 14.1 |
| 28 | 3.00 × 102 | 3.00 × 102 | 3.00 × 102 | 0 |
| Func. | Best | Worst | Mean | Std. |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 |
| 2 | 4.32 × 103 | 4.53 × 104 | 2.30 × 103 | 1.12 × 104 |
| 3 | 1.43 | 6.54 × 105 | 5.40 × 105 | 1.42 × 105 |
| 4 | 2.52 × 10−6 | 5.32 × 10−3 | 1.33 × 10−2 | 1.31 × 10−3 |
| 5 | 0 | 0 | 0 | 0 |
| 6 | 2.32 | 32.4 | 33.8 | 1.31 × 10−2 |
| 7 | 6.50 | 45.5 | 4.32 | |
| 8 | 10.0 | 14.2 | 2.09 | 1.30 × 10−2 |
| 9 | 30.0 | 45.5 | 23.9 | 1.12 |
| 10 | 6.50 × 10−3 | 0.00 | 4.48 × 10−2 | 2.23 × 10−2 |
| 11 | 0 | 0.00 | 0 | 0 |
| 12 | 25.0 | 50.0 | 42.9 | 10.1 |
| 13 | 11.0 | 1.37 × 102 | 1.11 × 10−2 | 12.6 |
| 14 | 0 | 5.45 × 10−2 | 2.46 × 10−2 | 11.7 |
| 15 | 3.30 × 103 | 4.24 × 103 | 5.34 × 103 | 2.38 × 102 |
| 16 | 0.23 | 1.23 | 1.26 | 0.139 |
| 17 | 32.4 | 42.5 | 43.4 | 3.16 × 10−15 |
| 18 | 12.3 | 1.26 × 102 | 1.23 × 102 | 1.64 |
| 19 | 1.40 | 2.33 | 2.37 | 0.141 |
| 20 | 13.0 | 20.7 | 15.5 | 0.528 |
| 21 | 2.00 × 102 | 1.18 × 103 | 4.33 × 102 | 2.41 × 102 |
| 22 | 7.40 | 43.5 | 12.7 | 5.31 |
| 23 | 4.50 × 103 | 5.38 × 103 | 4.52 × 103 | 4.21 × 102 |
| 24 | 21.0 | 2.35 × 102 | 1.48 × 103 | 1.02 |
| 25 | 2.20 × 102 | 3.47 × 102 | 3.23 × 102 | 2.41 |
| 26 | 2.00 × 102 | 3.26 × 102 | 2.17 × 102 | 4.40 |
| 27 | 5.12 × 102 | 1.35 × 103 | 5.33 × 102 | 34.0 |
| 28 | 4.04 × 102 | 2.67 × 103 | 3.54 × 102 | 34.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bagheri, M.; Nurmanova, V.; Abedinia, O.; Salay Naderi, M.; Ghadimi, N.; Salay Naderi, M. Renewable Energy Sources and Battery Forecasting Effects in Smart Power System Performance. Energies 2019, 12, 373. https://doi.org/10.3390/en12030373
Bagheri M, Nurmanova V, Abedinia O, Salay Naderi M, Ghadimi N, Salay Naderi M. Renewable Energy Sources and Battery Forecasting Effects in Smart Power System Performance. Energies. 2019; 12(3):373. https://doi.org/10.3390/en12030373
Chicago/Turabian StyleBagheri, Mehdi, Venera Nurmanova, Oveis Abedinia, Mohammad Salay Naderi, Noradin Ghadimi, and Mehdi Salay Naderi. 2019. "Renewable Energy Sources and Battery Forecasting Effects in Smart Power System Performance" Energies 12, no. 3: 373. https://doi.org/10.3390/en12030373
APA StyleBagheri, M., Nurmanova, V., Abedinia, O., Salay Naderi, M., Ghadimi, N., & Salay Naderi, M. (2019). Renewable Energy Sources and Battery Forecasting Effects in Smart Power System Performance. Energies, 12(3), 373. https://doi.org/10.3390/en12030373