Bayesian Estimation on Load Model Coefficients of ZIP and Induction Motor Model


Abstract
:1. Introduction
1.1. Composite Load Modeling Methods
1.2. Motivations for Using Bayesian Estimation
1.3. Bayesian Probability and Gibbs Sampling
| Algorithm 1 Gibbs sampling. |
|
1.4. Summary of Contributions
- To the best knowledge of the authors, the proposed Bayesian approach has not been investigated in the context of load model identification. Bayesian estimation-based approaches have been used in wind forecasting and state monitoring [1,2,22], as well as load forecasting [3,4,5]. The promising performance has shown plentiful possibility in power systems.
- The proposal is a generic approach. Detailed formulation and derivation of both static (ZIP) and dynamic (IM) models are presented. The proposed algorithm can be applied in both transmission and distribution network context.
- Numerical experiments illustrated that the proposal provides robust distribution estimation despite the existence of noise. Furthermore, the proposal estimation is more accurate in point estimation than conventional algorithms.
2. ZIP Model and Coefficient Estimation
2.1. ZIP Model
- The measurement noise follows a normal distribution, i.e., , where , and is the variance The reasons for making this assumption are: (1) According to the law of large numbers, a normal distribution would be the best one to represent the characteristics of the noise if the number of experiment is large enough. (2) Since normal distribution is a conjugate distribution, it is easier for model parameter updating when implementing Gibbs sampling.
- Total number of n independent and identically distributed (i.i.d.) samples are drawn, namely . Thus, the likelihood iswhere is the mean.
2.2. Gibbs in the ZIP Model
| Algorithm 2 Gibbs Sampling in the ZIP model. |
|
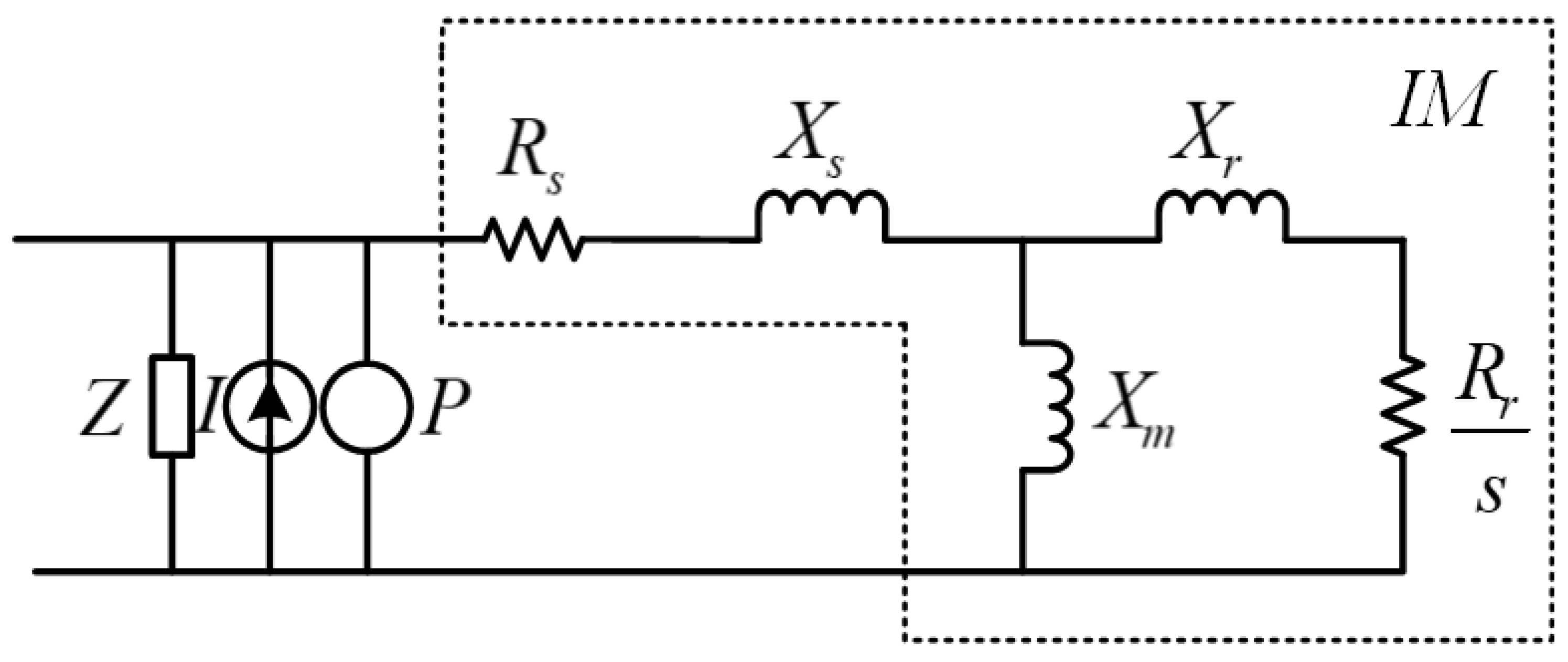
3. Induction Motor Model and Coefficient Estimation
3.1. Induction Motor Model
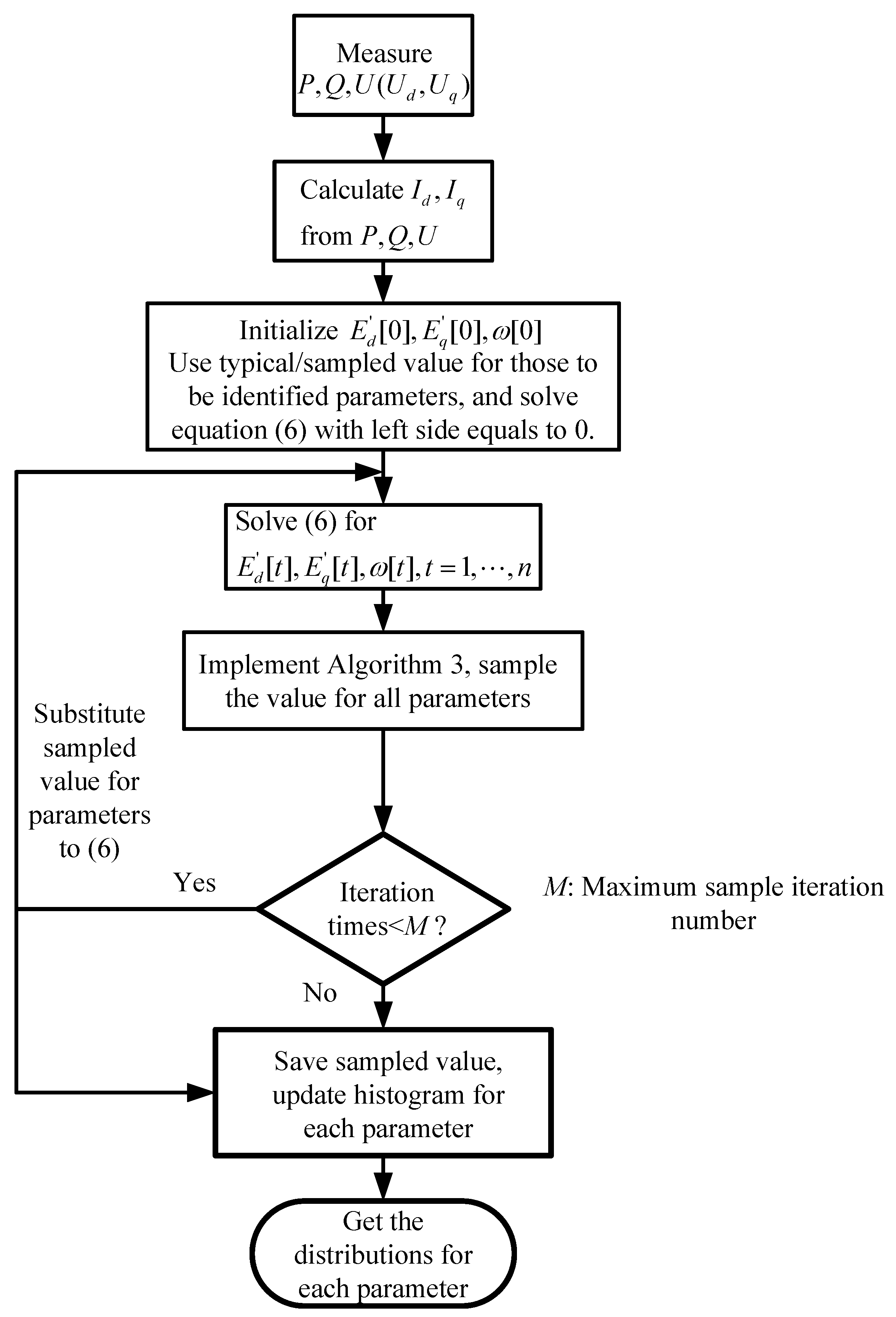
3.2. Gibbs Sampling in IM Model
| Algorithm 3 Gibbs Sampling in the ZIP model. |
|
4. Numerical Results
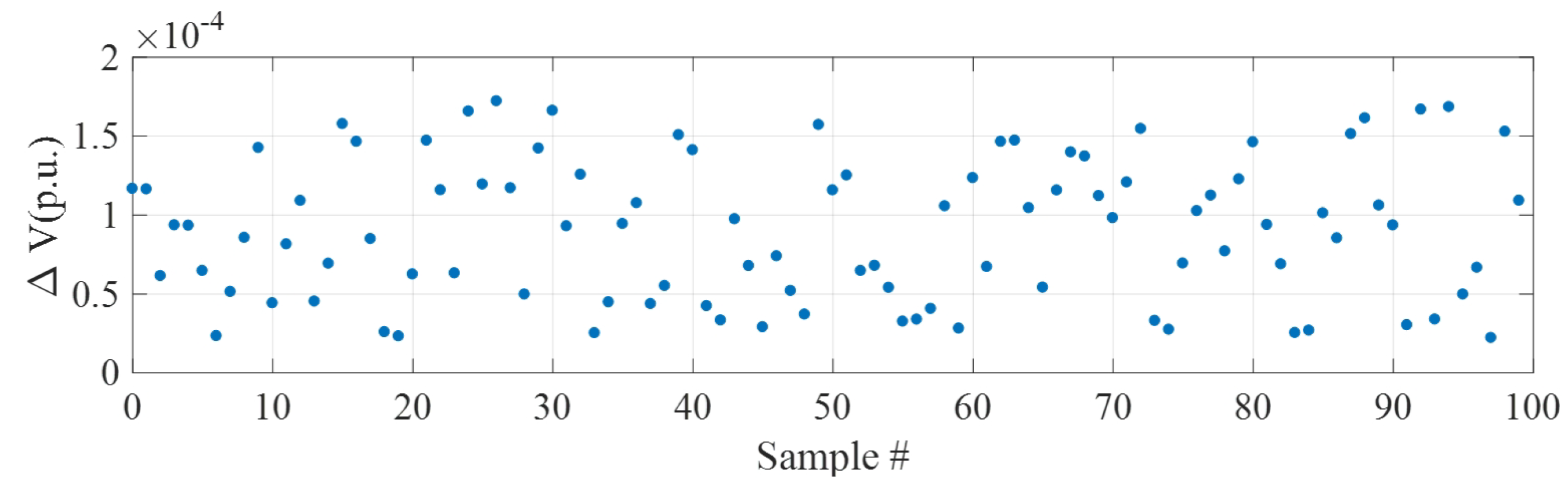
4.1. ZIP Model Identification
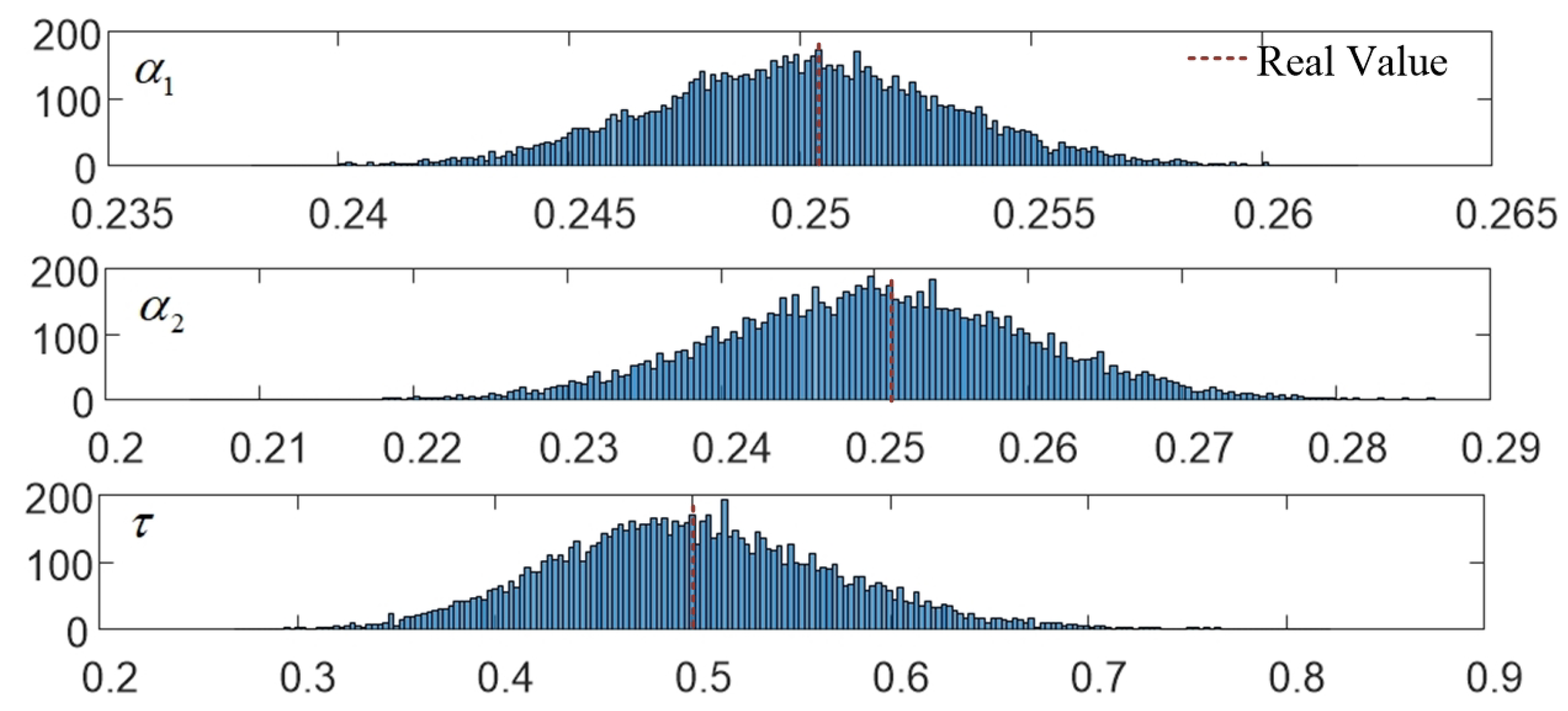
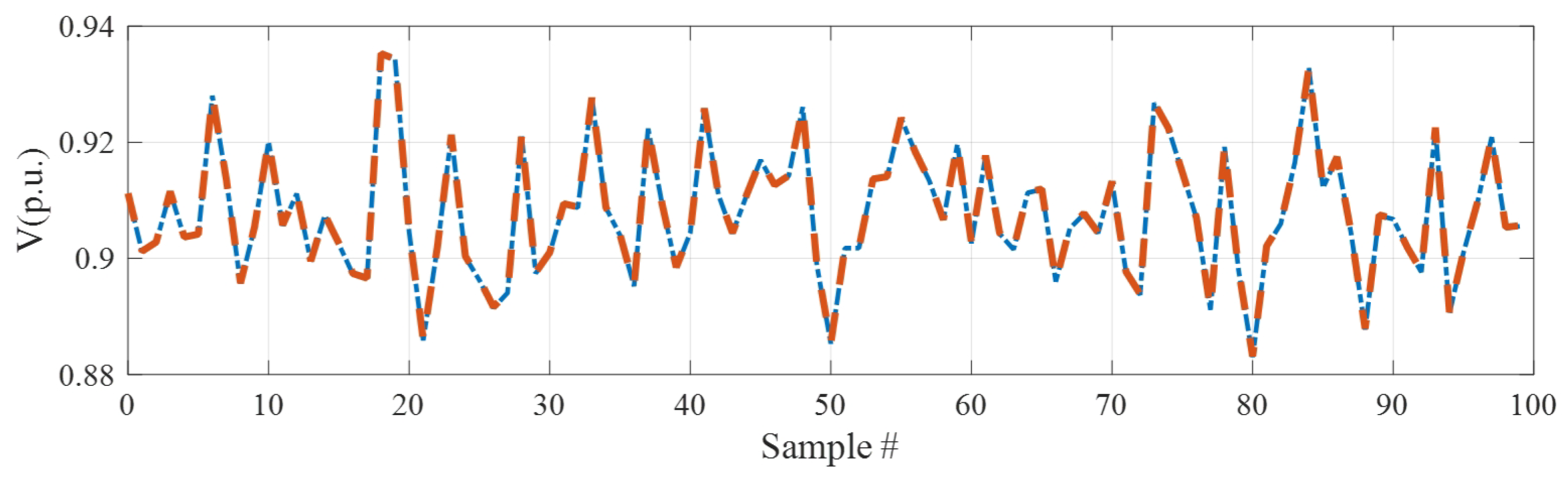
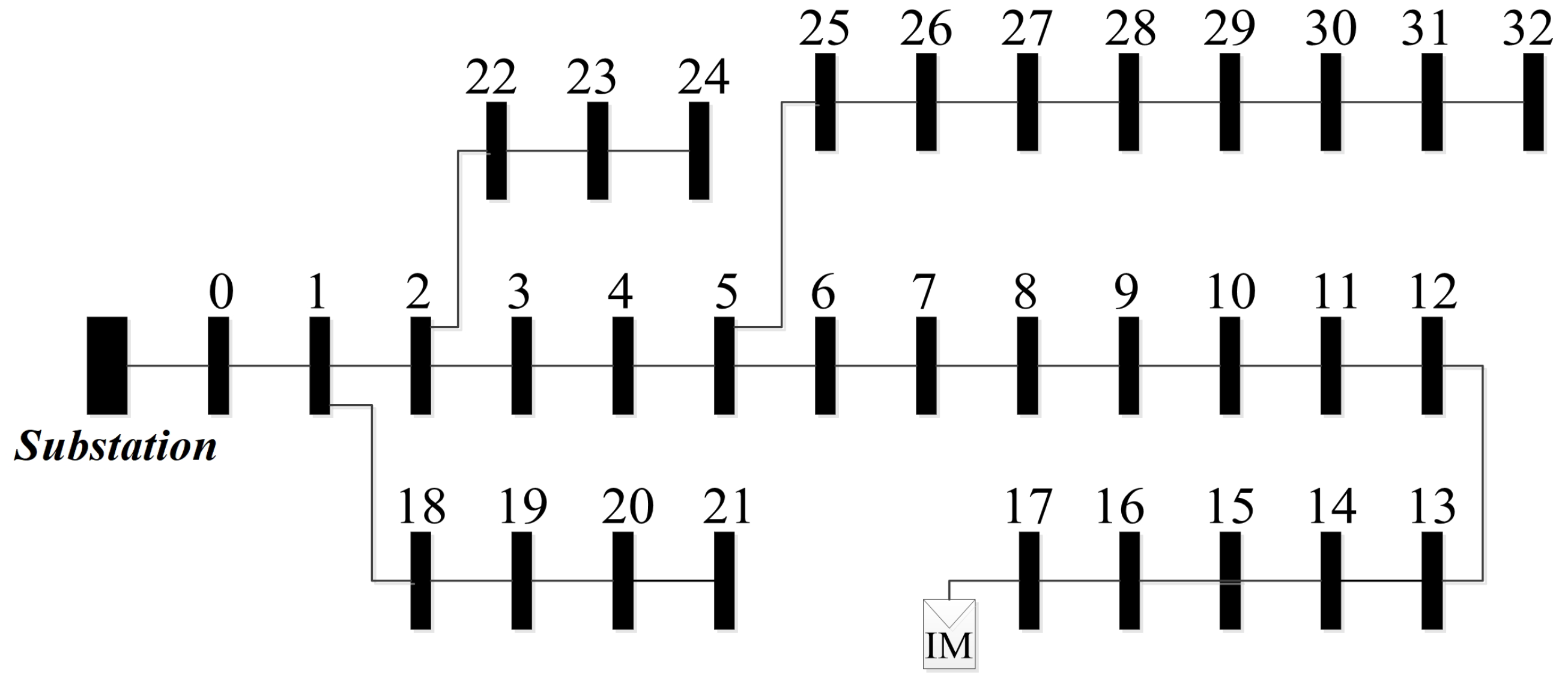
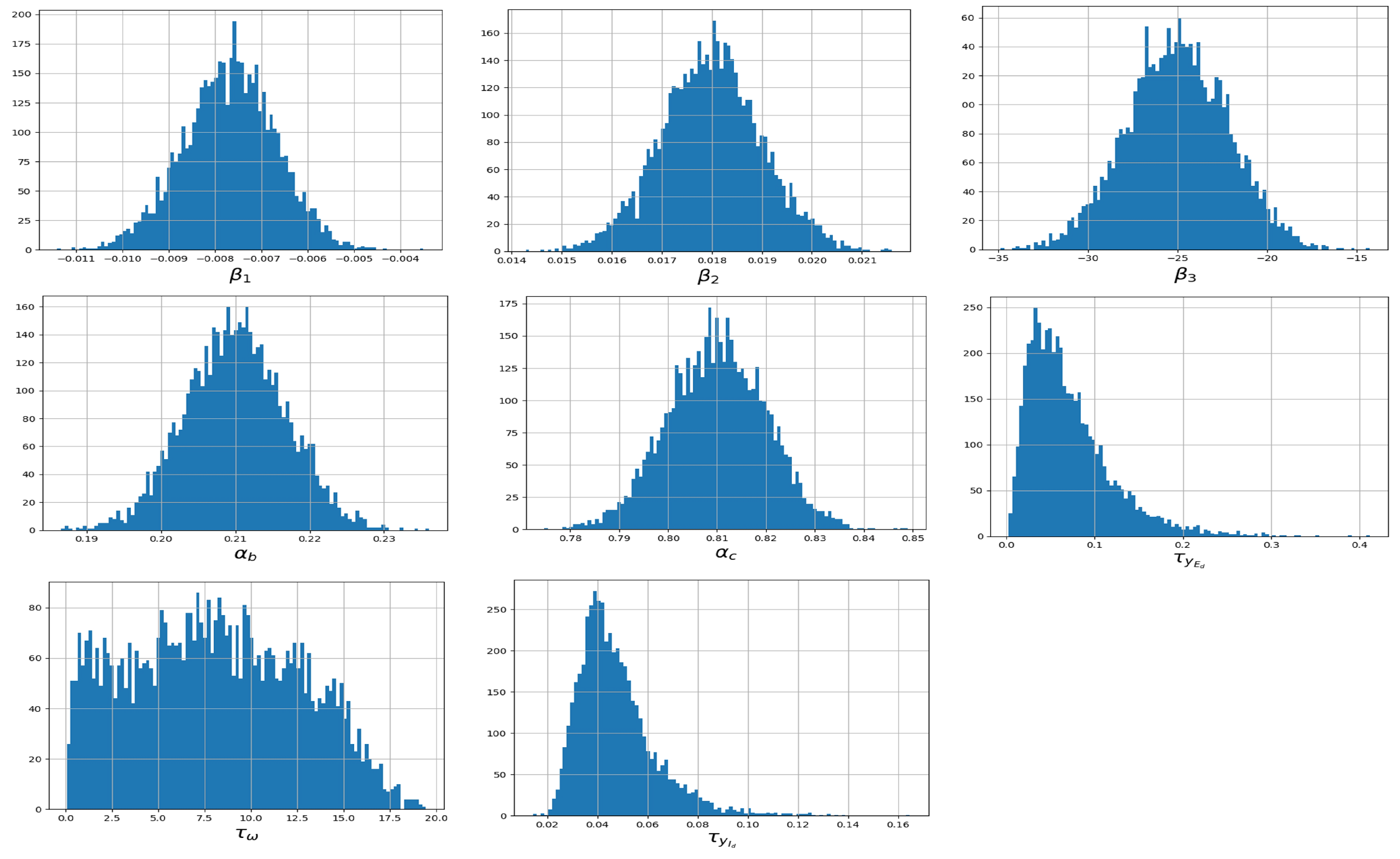
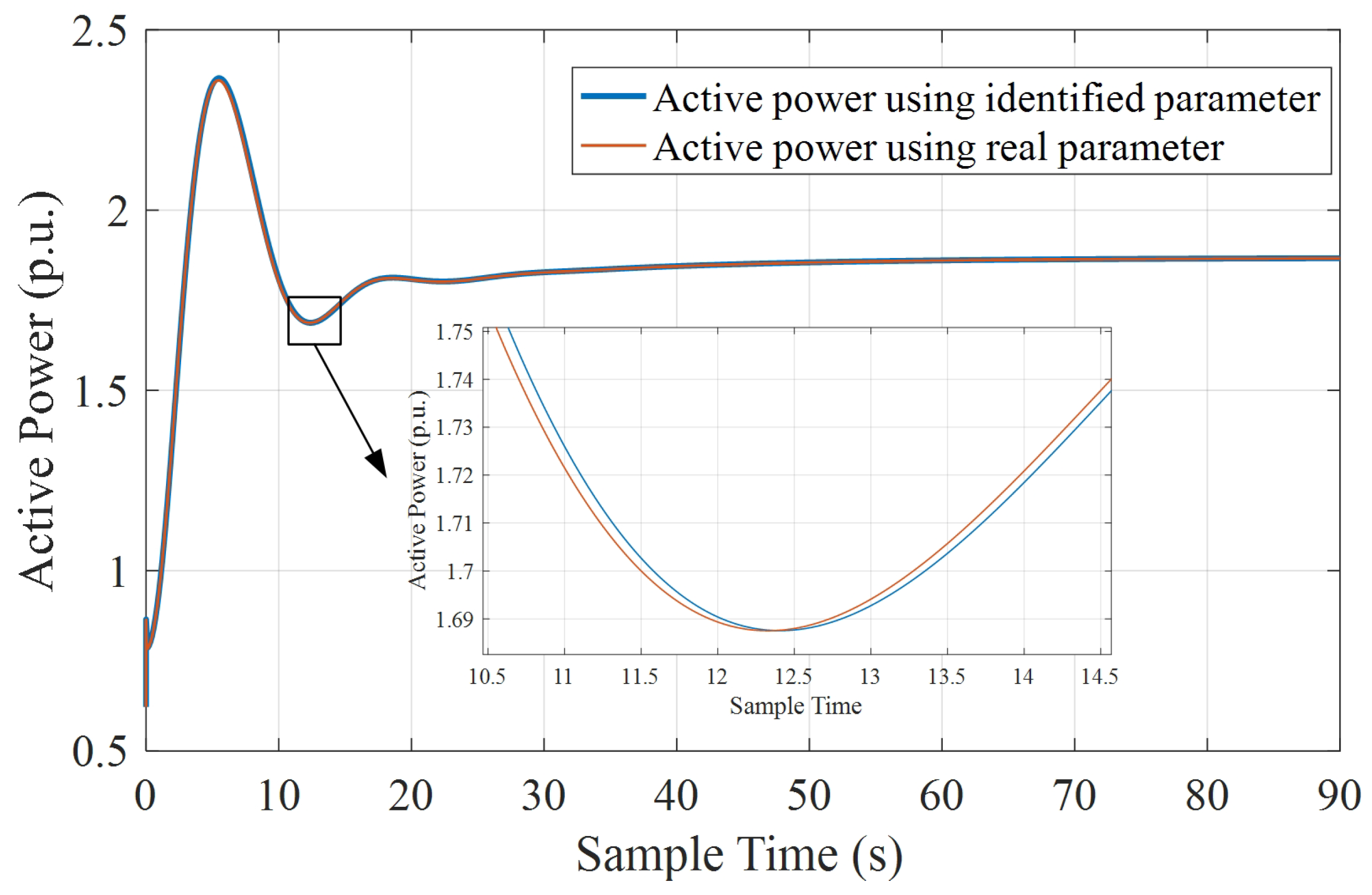
4.2. IM Model Identification
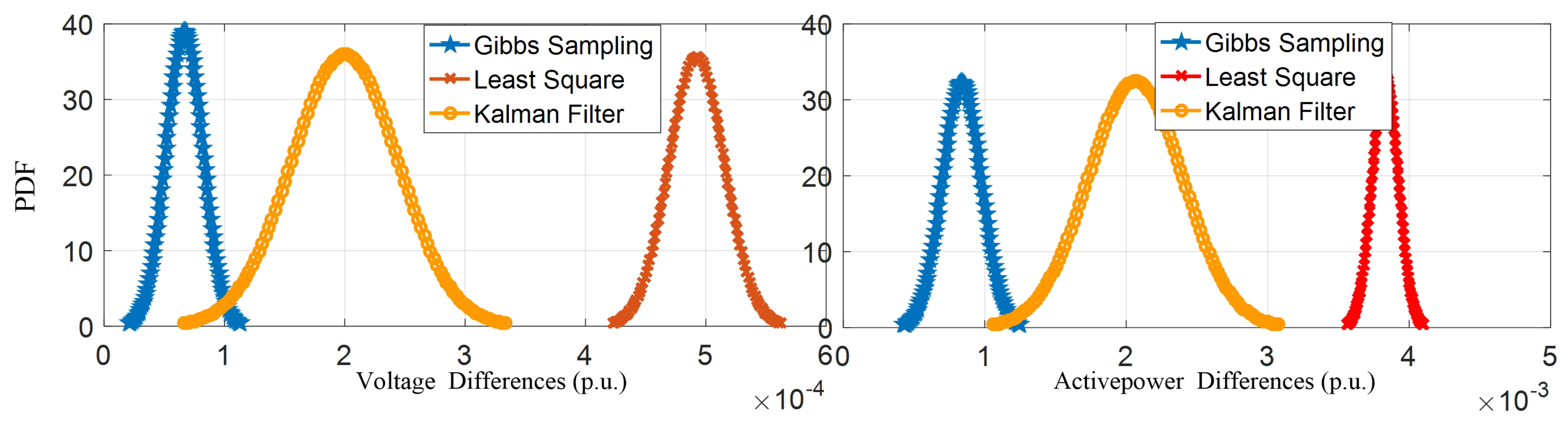
4.3. Benchmarks
5. Discussion
- 1
- It is assumed that the noise in ZIP and IM models follows a normal distribution. In practice, the true randomness of parameters of load models is not available. By the law of large numbers, a normal distribution would be the best approximation of the randomness if the sample size is large enough. However, the robustness of the proposal needs further investigation when the Gaussian assumption is violated.
- 2
- We are only estimating the parameters of ZIP or IM model. It is necessary to consider multiple ZIP and MI models connected to different locations in the grid. There might be inferences to the estimation.
- 3
- How to identify a composition model composed by ZIP and IM is another interesting topic, which is a future work of this project. Most of the work that has been done in composite load modeling needs to specify the percentage of ZIP by giving the active power load .
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| DGs | distributed generations |
| IM | induction motor |
| ERL | exponential recovery load model |
| LS | Least square |
| GA | Genetic algorithm |
| ANN | Artificial neural network |
| BE | Bayesian estimation |
| ML | maximum likelihood |
| Probability density function | |
| i.i.d. | independent and identically distributed |
Appendix A. Derivation of the ZIP Model
Appendix B. Derivation of the IM Model
References
- Arif, A.; Wang, Z.; Wang, J.; Mather, B.; Bashualdo, H.; Zhao, D. Load Modeling—A Review. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Milanovic, J.V.; Yamashita, K.; Martínez Villanueva, S.; Djokic, S.Ž.; Korunović, L.M. International Industry Practice on Power System Load Modeling. IEEE Trans. Power Syst. 2013, 8, 3038–3046. [Google Scholar] [CrossRef]
- Milanović, J.V.; Mat Zali, S. Validation of Equivalent Dynamic Model of Active Distribution Network Cell. IEEE Trans. Power Syst. 2013, 8, 2101–2110. [Google Scholar] [CrossRef]
- Bokhari, A.; Alkan, A.; Dogan, R.; Diaz-Aguiló, M.; León, F.D.; Czarkowski, D.; Zabar, Z.; Birenbaum, L.; Noel, A.; Uosef, R.E. Experimental Determination of the ZIP Coefficients for Modern Residential, Commercial, and Industrial Loads. IEEE Trans. Power Deliv. 2014, 1372–1381. [Google Scholar] [CrossRef]
- Renmu, H.; Jin, M.; Hill, D.J. Composite Load Modeling Via Measurement Approach. IEEE Trans. Power Syst. 2006, 5, 663–672. [Google Scholar] [CrossRef]
- Tang, Y.; Zhao, S.; Ten, C.-W.; Zhang, K. Enhancement of Distribution Load Modeling Using Statistical Hybrid Regression. In Proceedings of the Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 23–26 April 2017; pp. 1–5. [Google Scholar]
- Alyami, S.; Wang, C.; Fu, C. Development of Autonomous Schedules of Controllable Loads for Cost Reduction and PV Accommodation in Residential Distribution Networks. In Proceedings of the Electrical Power and Energy Conference (EPEC), London, ON, Canada, 26–28 October 2015; pp. 81–86. [Google Scholar]
- Ten, C.-W.; Tang, Y. Electric Power: Distribution Emergency Operation; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Kundur, P.; Balu, N.; Lauby, M. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Fu, C.; Wang, C.; Alyami, S. An LMI Based Stability Margin Analysis for Active PV Power Control of Distribution Networks with Time-Invariant Delays. arXiv, 2018; arXiv:1804.06903. [Google Scholar]
- Kim, J.-K.; An, K.; Ma, J.; Shin, J.; Song, K.-B.; Park, J.-D.; Park, J.-W.; Hur, K. Fast and Reliable Estimation of Composite Load Model Parameters Using Analytical Similarity of Parameter Sensitivity. IEEE Trans. Power Syst. 2016, 1, 663–671. [Google Scholar] [CrossRef]
- Singh, D.; Misra, R.K. Effect of Load Models in Distributed Generation Planning. IEEE Trans. Power Syst. 2007, 11, 2204–2212. [Google Scholar] [CrossRef]
- Al Abri, R.S.; El-Saadany, E.F.; Atwa, Y.M. Optimal Placement and Sizing Method to Improve the Voltage Stability Margin in a Distribution System using Distributed Generation. IEEE Trans. Power Syst. 2013, 2, 326–334. [Google Scholar] [CrossRef]
- Ge, Y.; Flueck, A.J.; Kim, D. K.; Ahn, J.B.; Lee, J.D.; Kwon, D.Y. An Event-Oriented Method for Online Load Modeling Based on Synchrophasor Data. IEEE Trans. Smart Grid 2015, 7, 2060–2068. [Google Scholar] [CrossRef]
- Vignesh, V.; Chakrabarti, S.; Srivastava, S.C. Classification and Modelling of Loads in Power Systems using SVM and Optimization Approach. In Proceedings of the Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar]
- Patel, A.; Wedeward, K.; Smith, M. Parameter Estimation for Inventory of Load Models in Electric Power Systems. In Proceedings of the World Congress on Engineering and Computer Science, San Francisco, CA, USA, 22–24 October 2014; pp. 22–24. [Google Scholar]
- Bao, Y.; Wang, L.; Wang, C.; Wang, Y. Hammerstein Models and Real-Time System Identification of Load Dynamics for Voltage Management. IEEE Access 2018, 2060–2068. [Google Scholar] [CrossRef]
- Chang, G.W.; Chen, C.I.; Liu, Y.J. A Neural-Network-Based Method of Modeling Electric Arc Furnace Load for Power Engineering Study. IEEE Trans. Power Syst. 2010, 2, 138–146. [Google Scholar] [CrossRef]
- Wang, C.; Wang, Z.; Wang, J.; Zhao, D. Robust Time-Varying Parameter Identification for Composite Load Modeling. IEEE Trans. Smart Grid 2017, 1949–3053. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, Z.; Wang, J. Robust Time-Varying Load Modeling for Conservation Voltage Reduction Assessment. IEEE Trans. Smart Grid 2018, 7, 3304–3312. [Google Scholar] [CrossRef]
- Meyn, S.P.; Tweedie, R.L. Markov Chains and Stochastic Stability; Springer Science & Business Media: London, UK, 2012. [Google Scholar]
- Lynch, S. Introduction to Applied Bayesian Statistics and Estimation for Social Scientists; Springer Science & Business Media: New York, NY, USA, 2007. [Google Scholar]
- Liu, Q.; Chen, Y.; Duan, D. The Load Modeling and Parameters Identification for Voltage Stability Analysis. In Proceedings of the International Conference on Power System Technology, Kunming, China, 13–17 October 2002; pp. 2030–2033. [Google Scholar]
- Lee, S.-H.; Son, S.-E.; Lee, S.-M.; Cho, J.-M.; Song, K.-B.; Park, J.-W. Kalman-Filter Based Static Load Modeling of Real Power System using K-EMS Data. J. Electr. Eng. Technol. 2012, 7, 304–311. [Google Scholar] [CrossRef]
- Best, M.C.; Gordon, T.J.; Dixon, P.J. An Extended Adaptive Kalman Filter for Real-time State Estimation of Vehicle Handling Dynamics. Veh. Syst. Dyn. 2000, 34, 57–75. [Google Scholar] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Para. | Real Value | Est. Value (Mean) | Error (%) |
|---|---|---|---|
| 0.0077 | 0.007683 | 0.22 | |
| 0.018 | 0.01824 | 1.33 | |
| 25 | 24.8 | 0.8 | |
| 0.20 | 0.211 | 5.5 | |
| 0.80 | 0.813 | 1.63 |
| Para. Error | GS (%) | LS (%) | KF (%) |
|---|---|---|---|
| Voltage | 0.007 | 0.062 | 0.024 |
| Active Power | 1.12 | 4.65 | 2.64 |
| Para. | GS | LS | KF | Real Value |
|---|---|---|---|---|
| 0.007683 | 0.0076 | 0.0077 | 0.0077 | |
| 0.01824 | 0.1375 | 0.0185 | 0.018 | |
| 24.8 | 18 | 34 | 25 | |
| 0.211 | 2.06 | 1.8 | 0.2 | |
| 0.813 | 4.04 | 3 | 0.8 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Chen, Q.; Fu, C.; Yu, Z.; Shi, D.; Wang, Z. Bayesian Estimation on Load Model Coefficients of ZIP and Induction Motor Model. Energies 2019, 12, 547. https://doi.org/10.3390/en12030547
Li H, Chen Q, Fu C, Yu Z, Shi D, Wang Z. Bayesian Estimation on Load Model Coefficients of ZIP and Induction Motor Model. Energies. 2019; 12(3):547. https://doi.org/10.3390/en12030547
Chicago/Turabian StyleLi, Haifeng, Qing Chen, Chang Fu, Zhe Yu, Di Shi, and Zhiwei Wang. 2019. "Bayesian Estimation on Load Model Coefficients of ZIP and Induction Motor Model" Energies 12, no. 3: 547. https://doi.org/10.3390/en12030547
APA StyleLi, H., Chen, Q., Fu, C., Yu, Z., Shi, D., & Wang, Z. (2019). Bayesian Estimation on Load Model Coefficients of ZIP and Induction Motor Model. Energies, 12(3), 547. https://doi.org/10.3390/en12030547