Wide Bandwidth Control for Multi-Parallel Grid-Connected Inverters with Harmonic Compensation



Abstract
:1. Introduction
2. Analysis on Control Bandwidth of Multi-Parallel HCGIs System
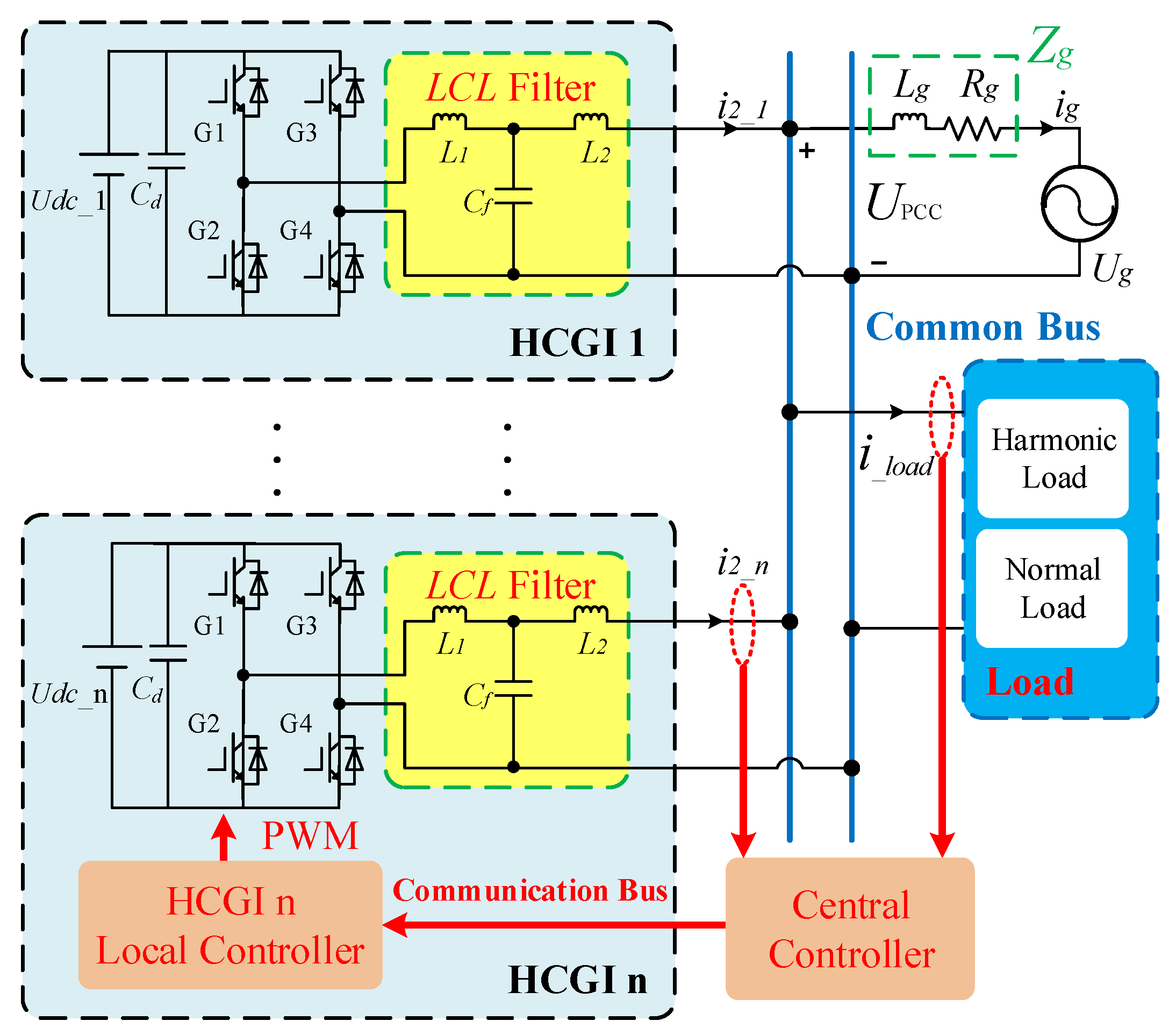
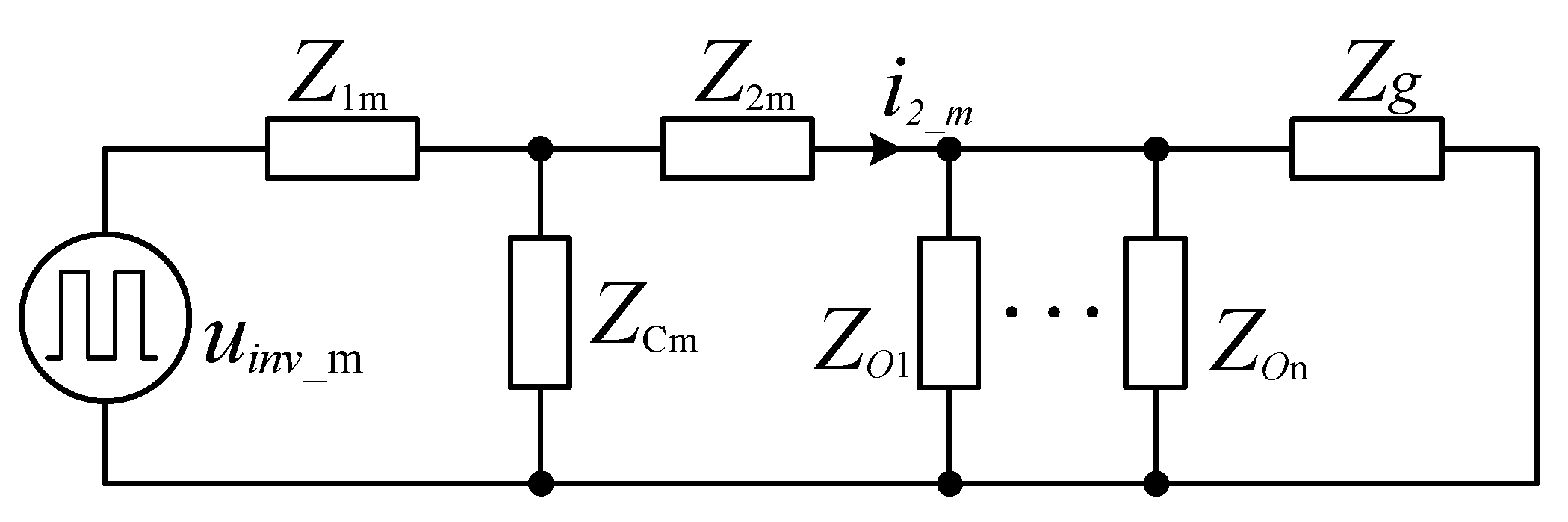
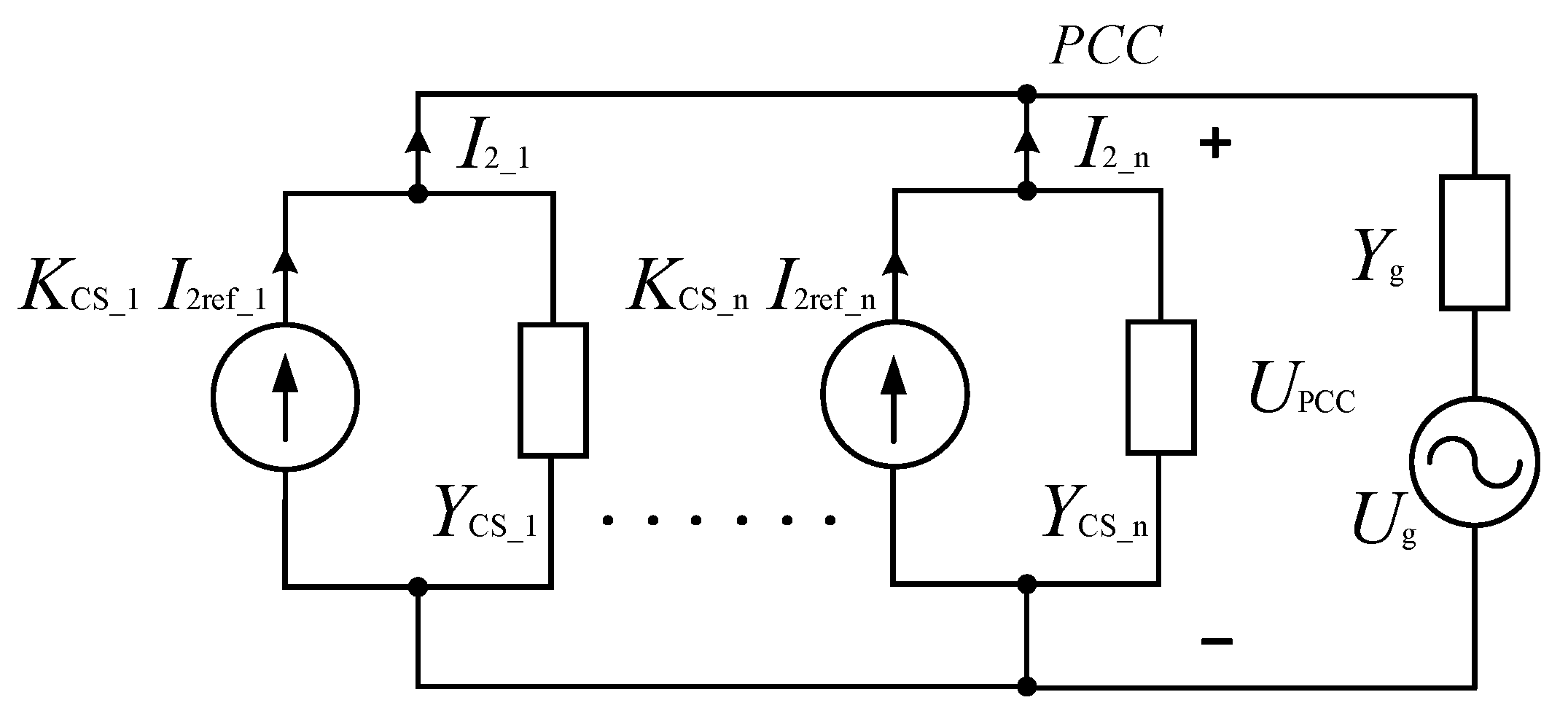
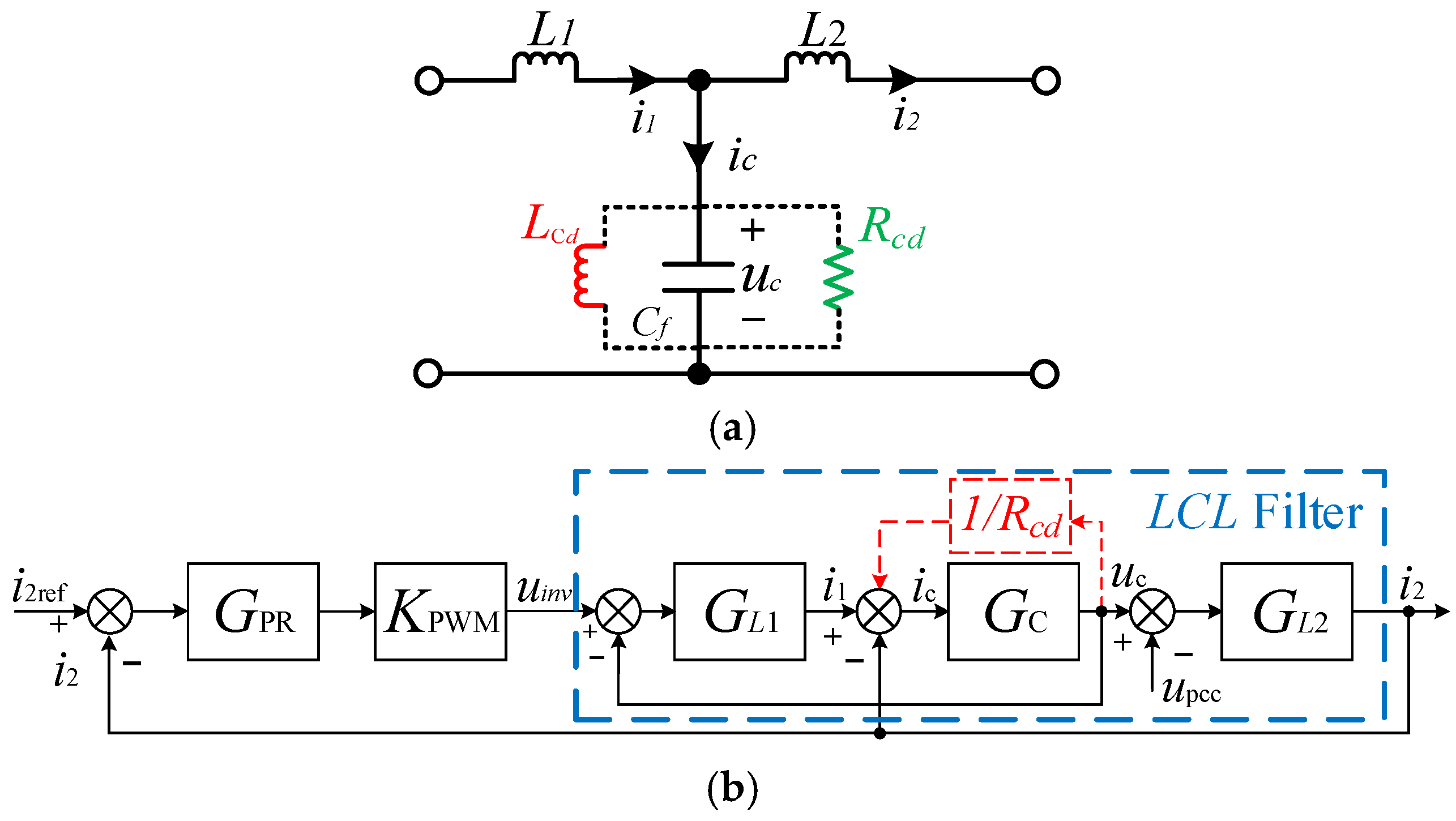
2.1. Analysis of Multi-Parallel HCGIs System
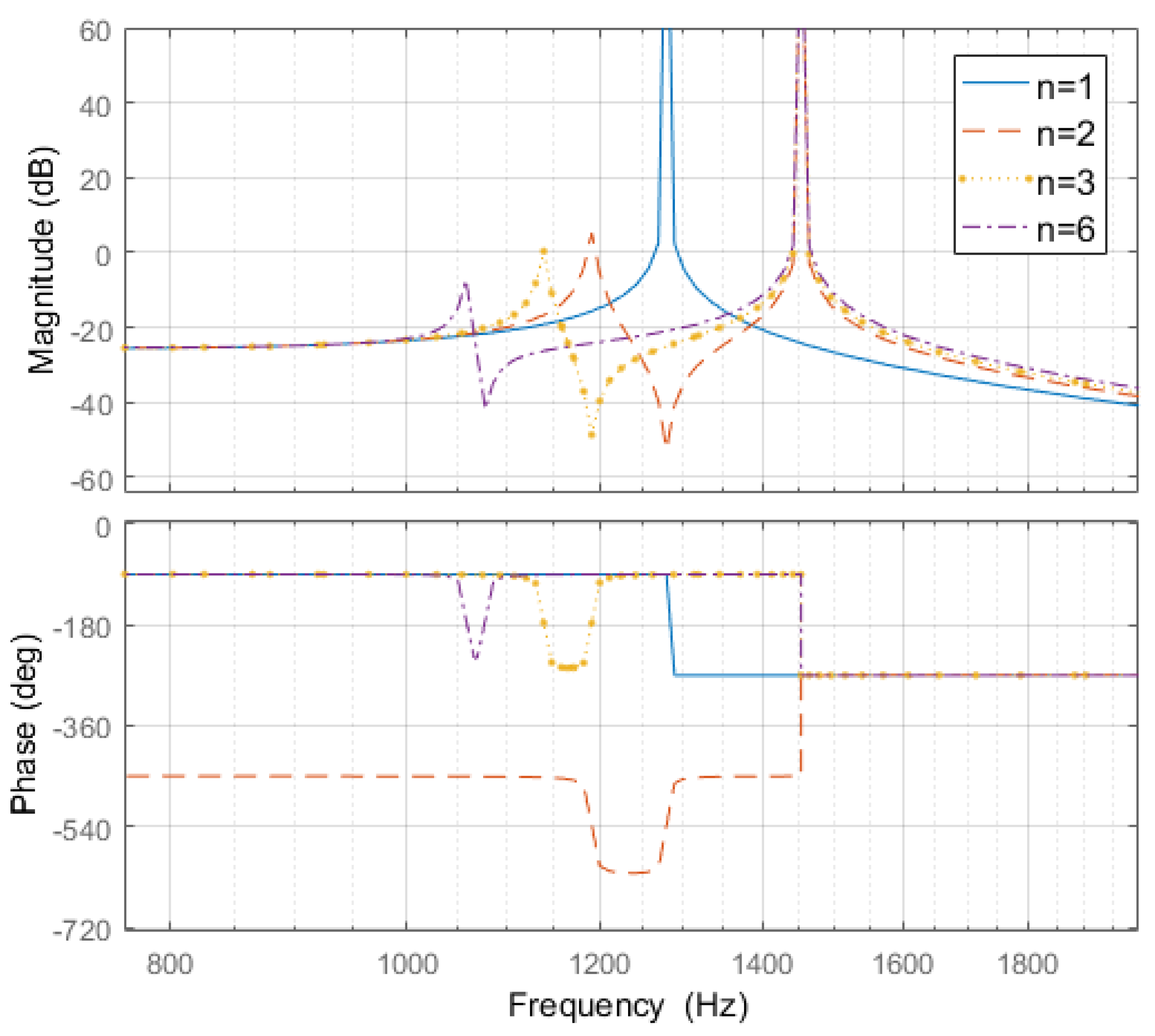
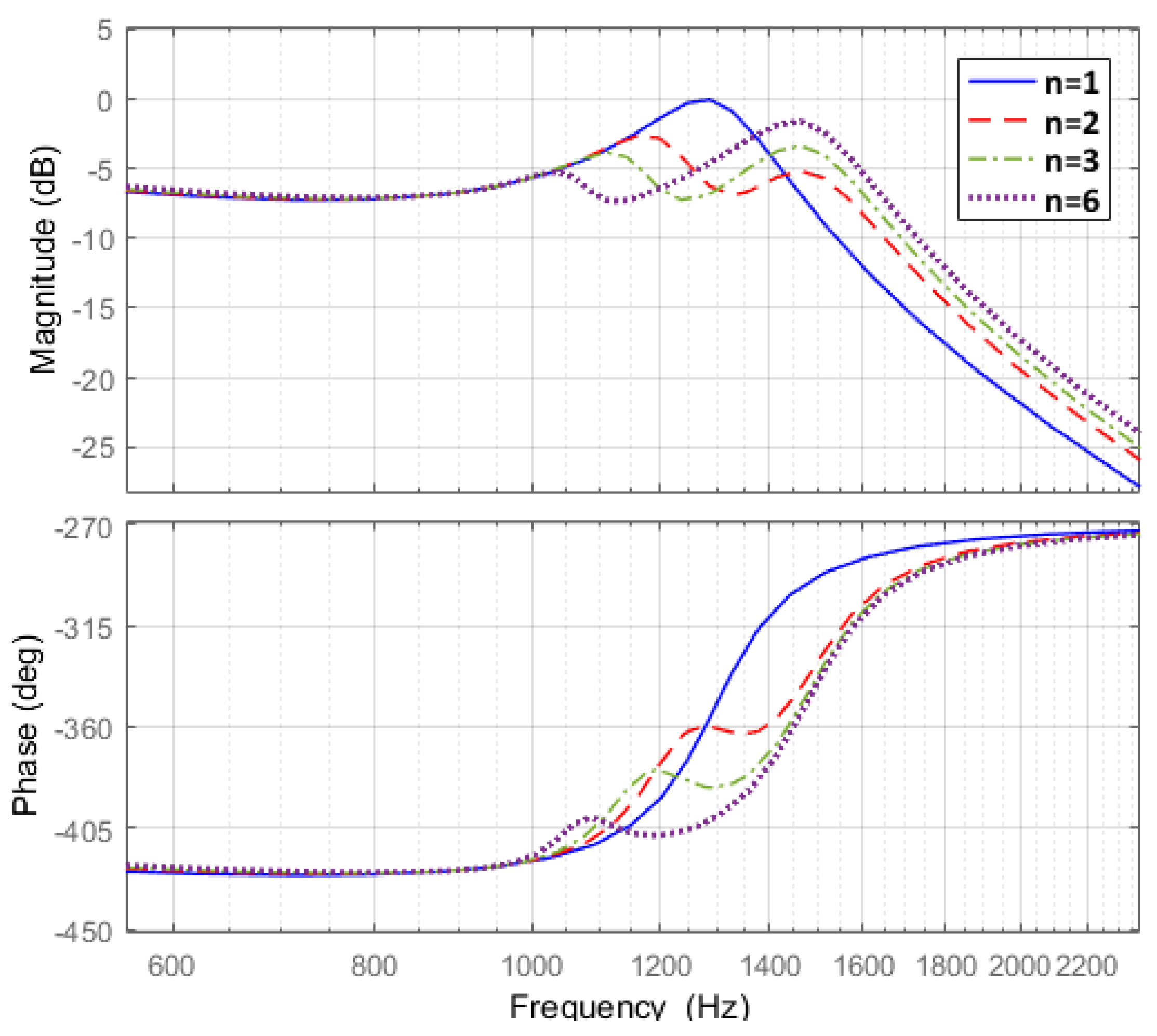
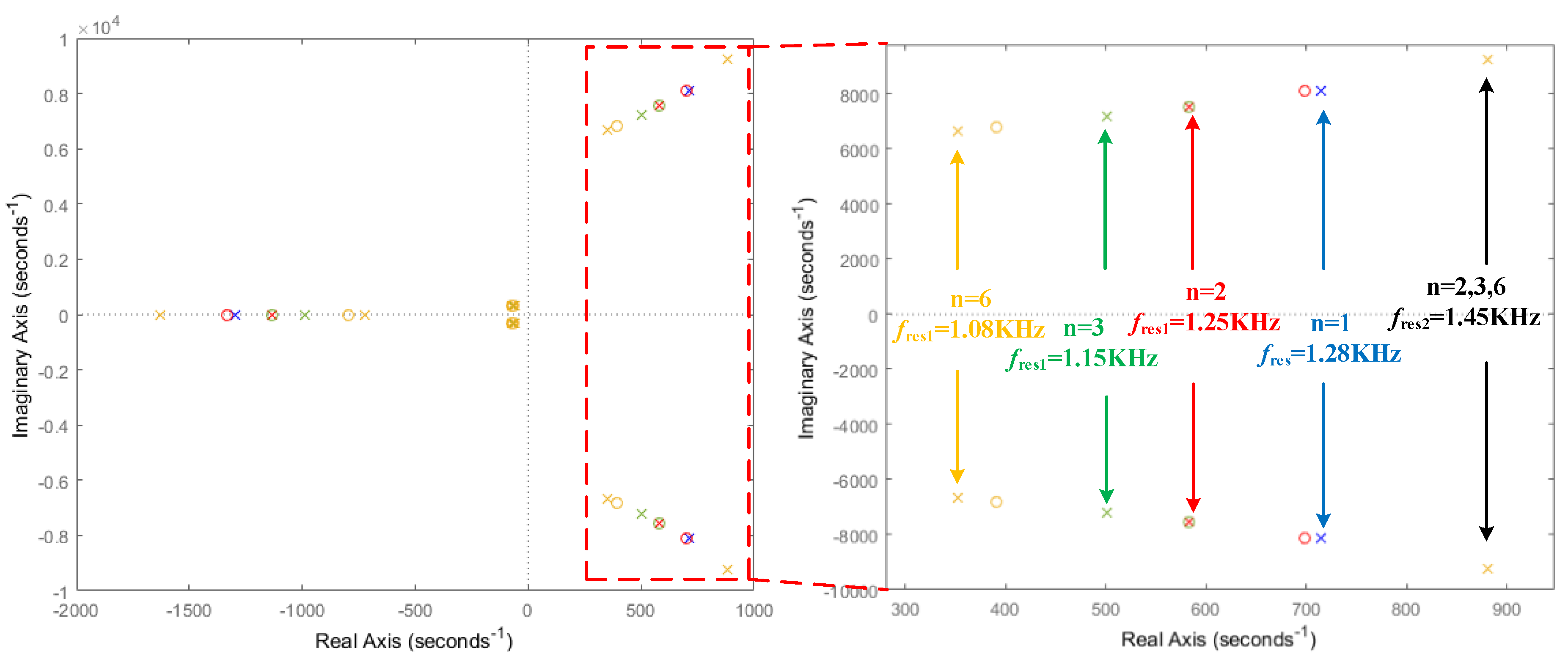
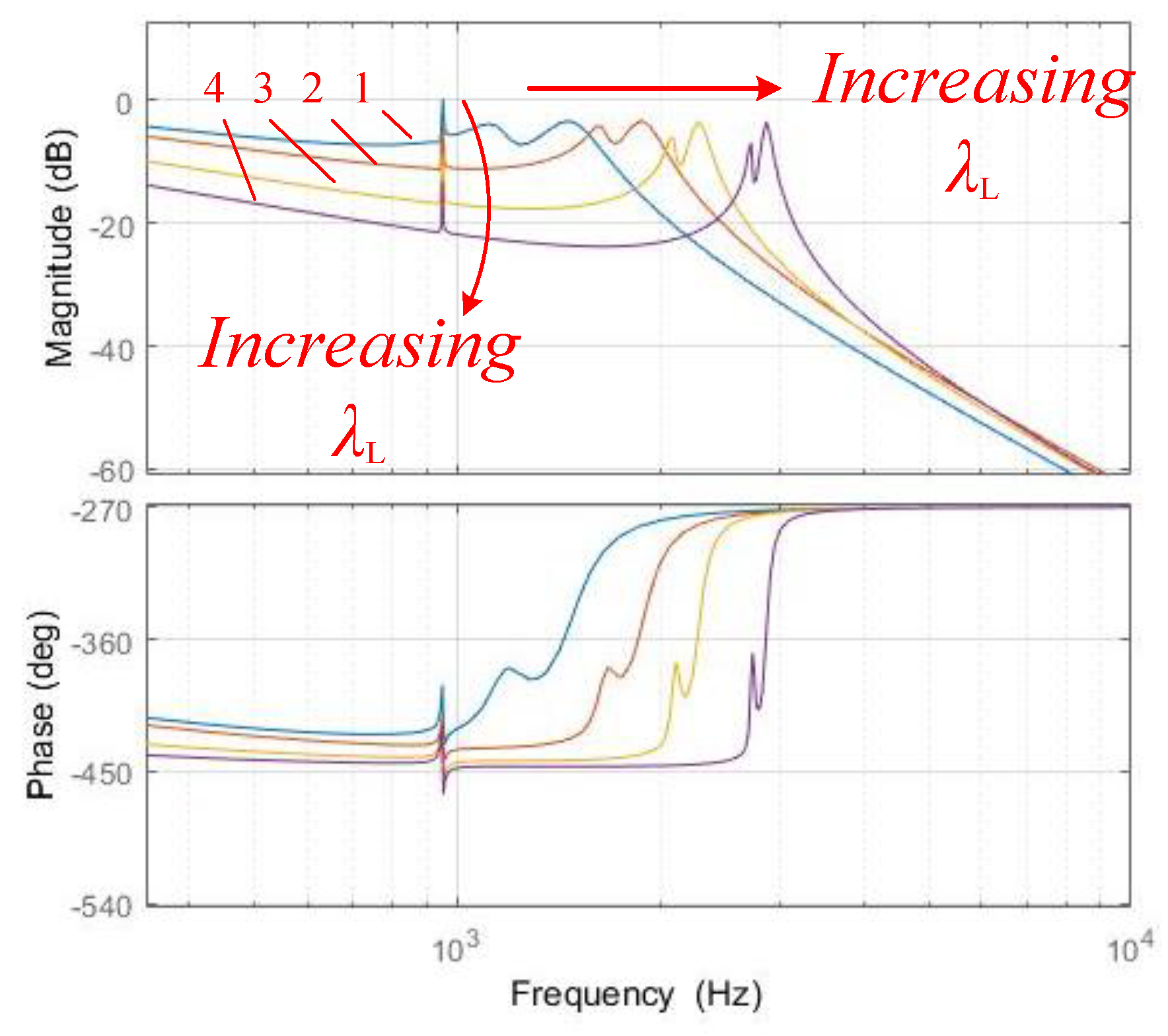
2.2. Influence of Multi-Parallel Inverters on Control Bandwidth
3. Bandwidth Control of Multi-parallel HCGIs System
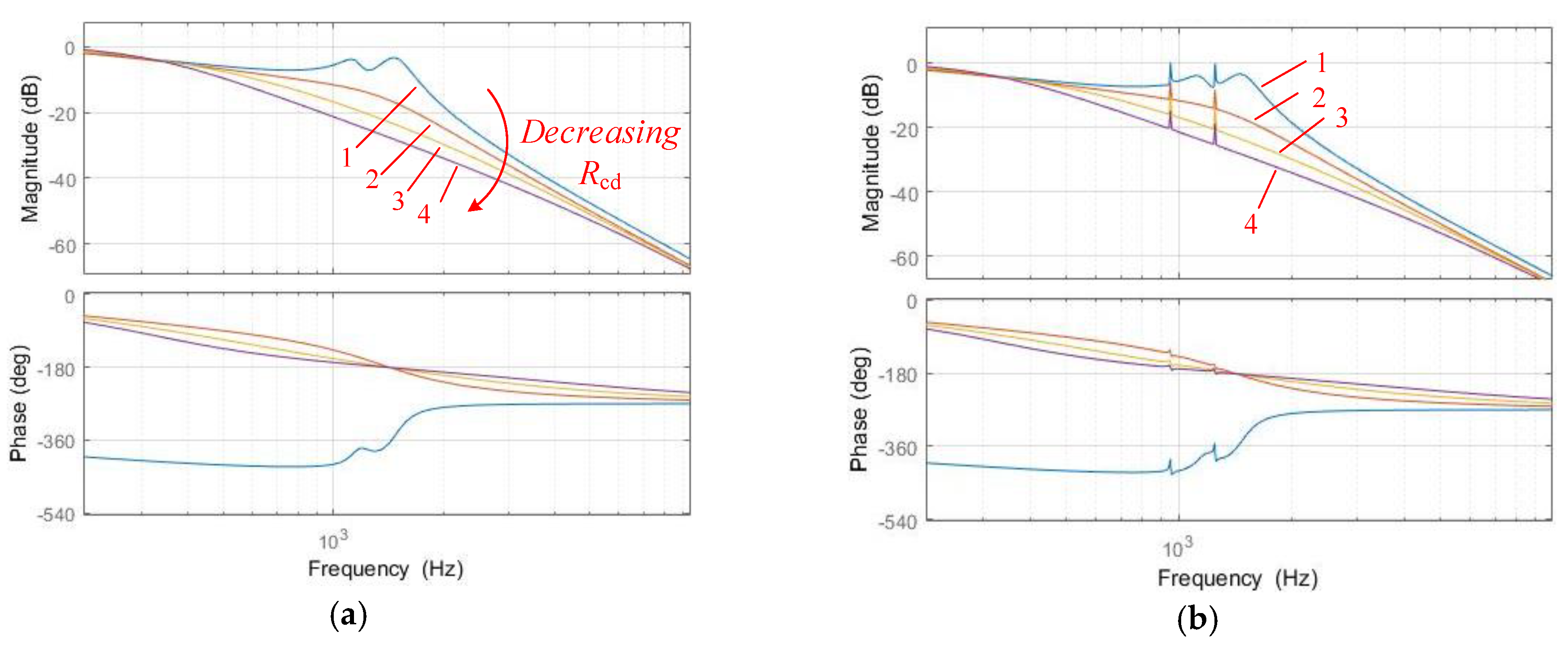
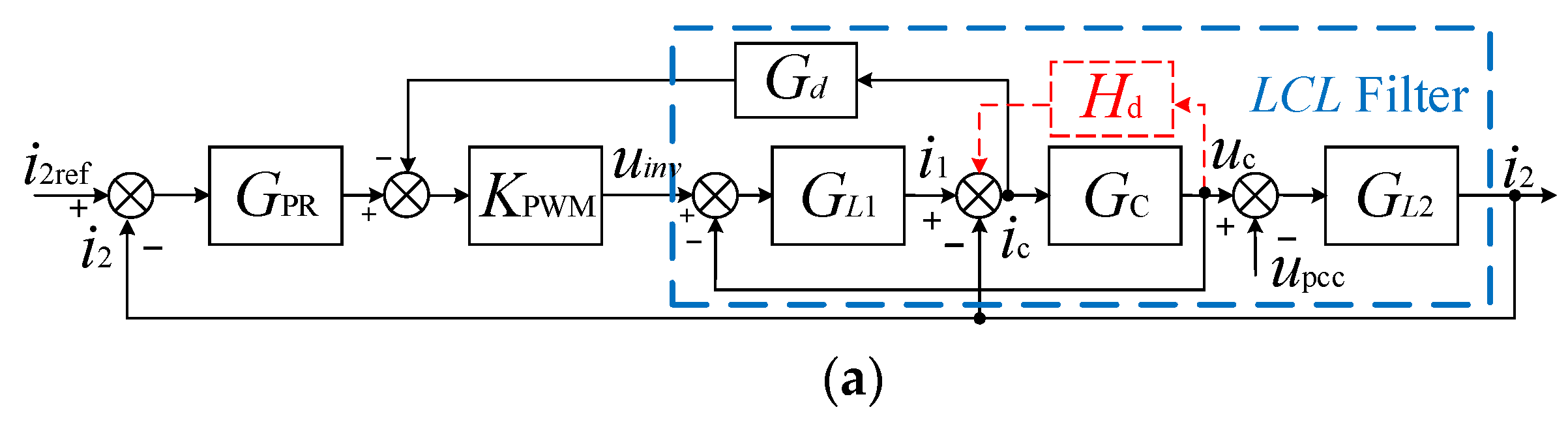
3.1. Active Damping Method in Multi-Parallel HCGIs System
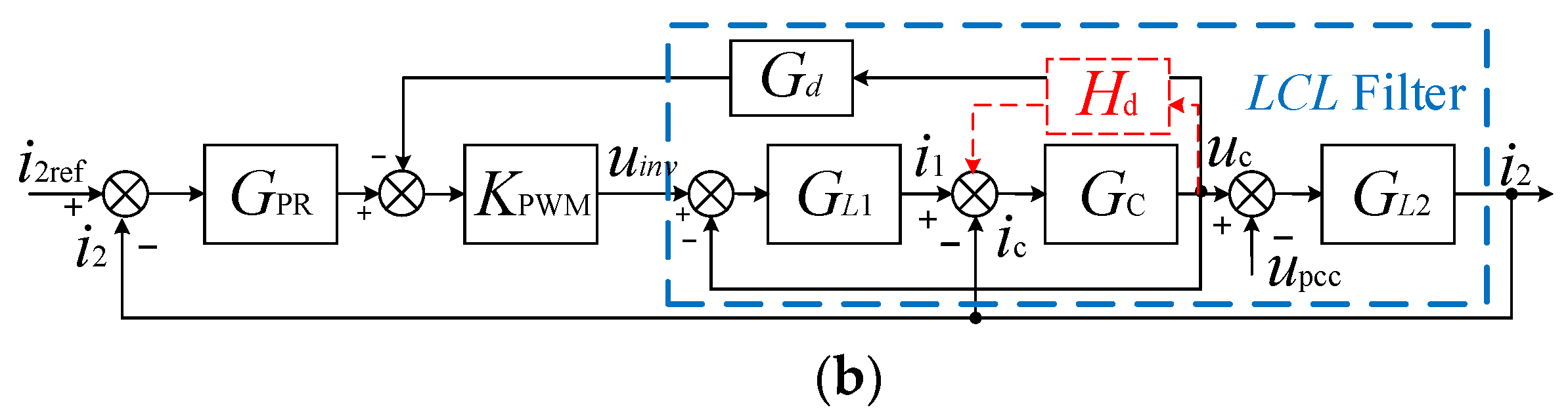
3.2. Virtual Impedance Method for the Bandwidth Control
3.3. Analysis of Bandwidth Control
3.4. Design of Feedback Channel Gd
3.4.1. Feedback channel comparison
3.4.2. Design of the Feedback Constant
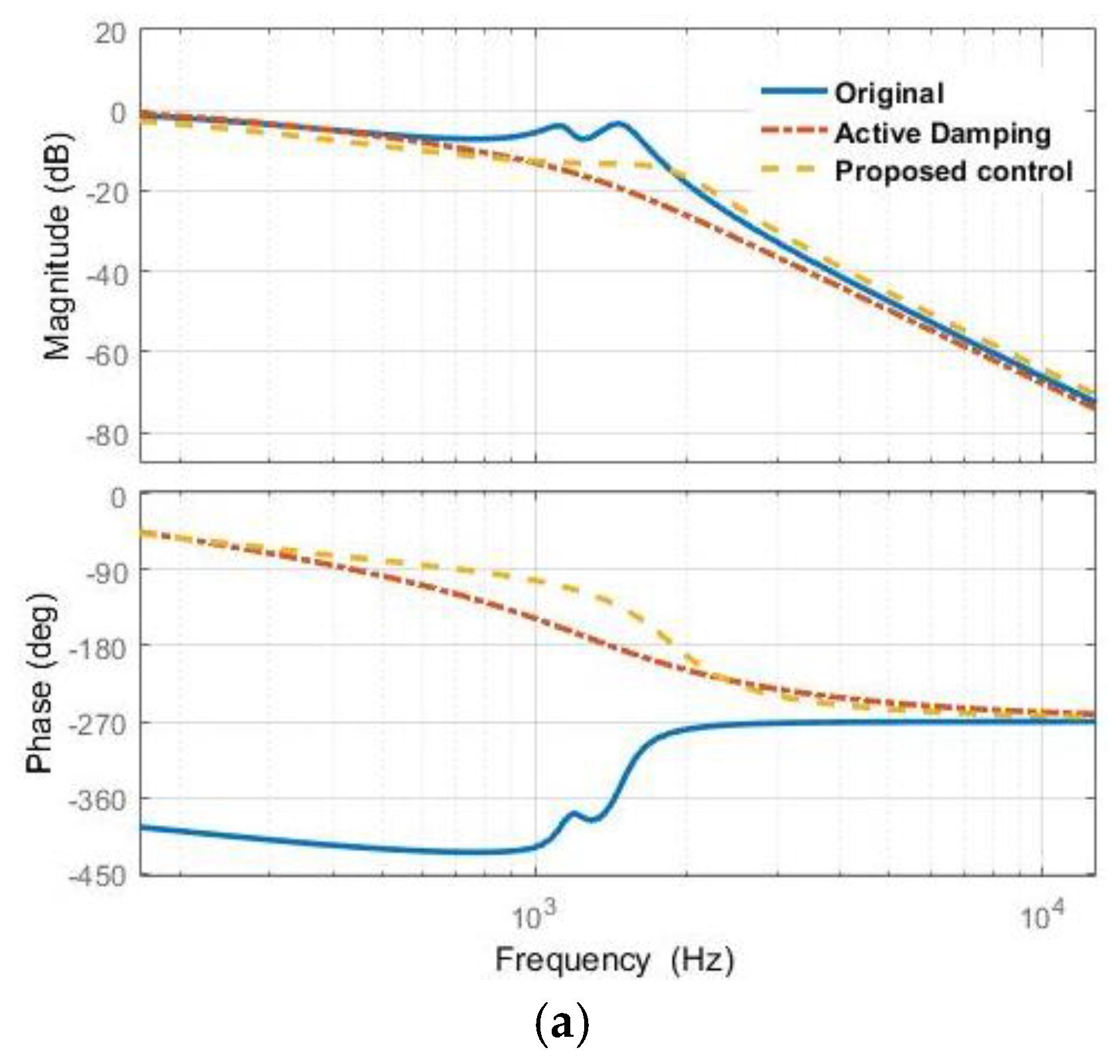
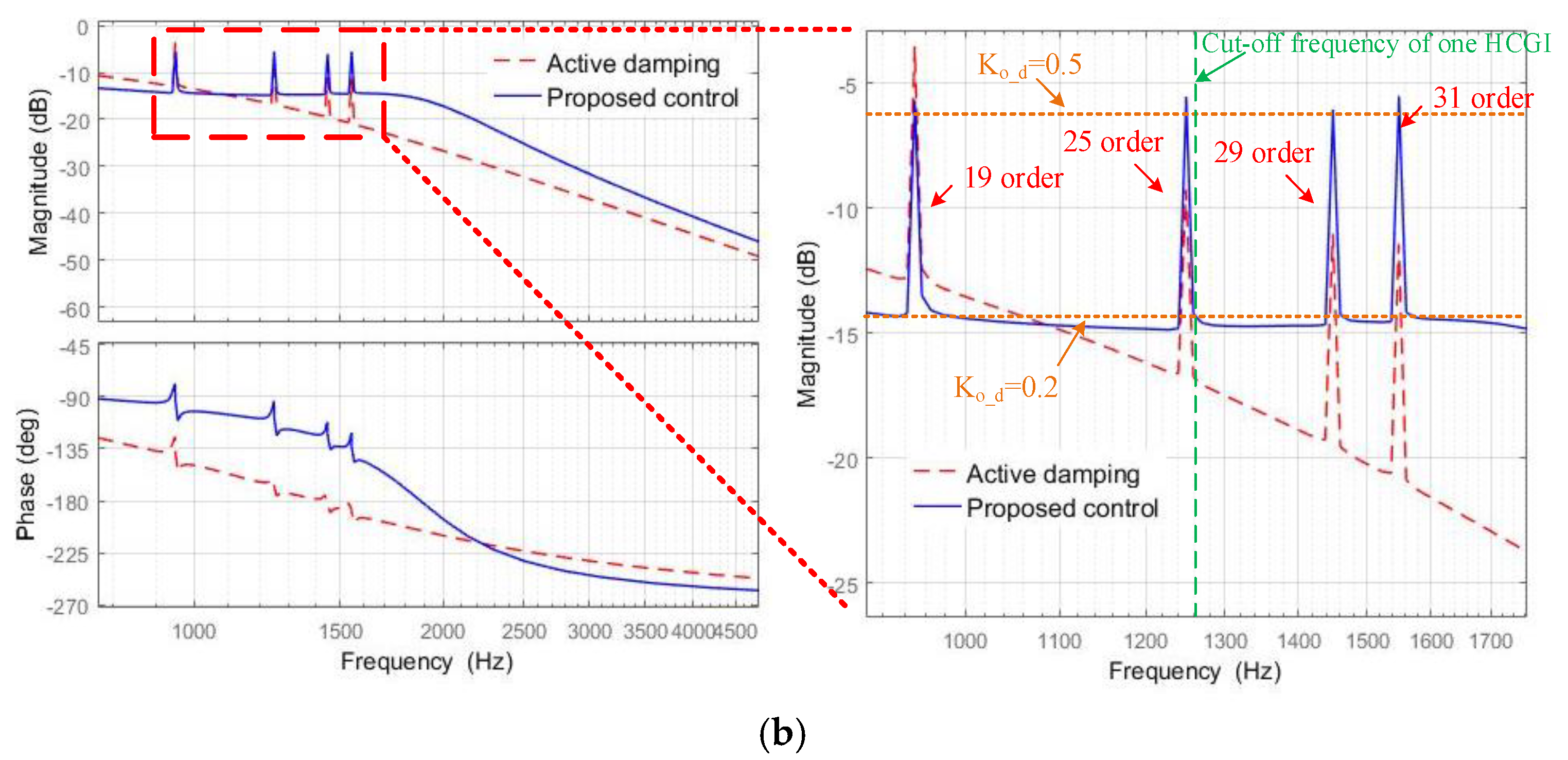
3.4.3. Comparison of Performance between the Proposed Control and Active Damping
4. Result Validation
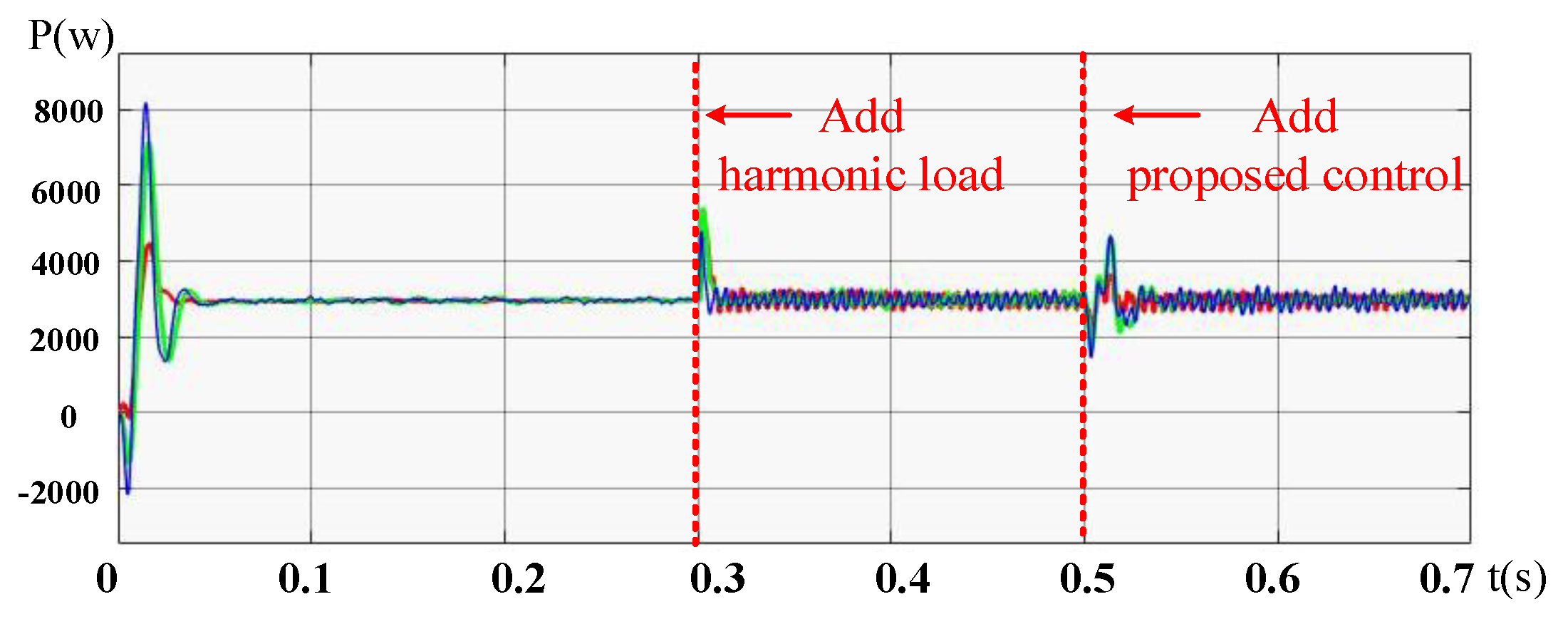
4.1. Simulation Validation
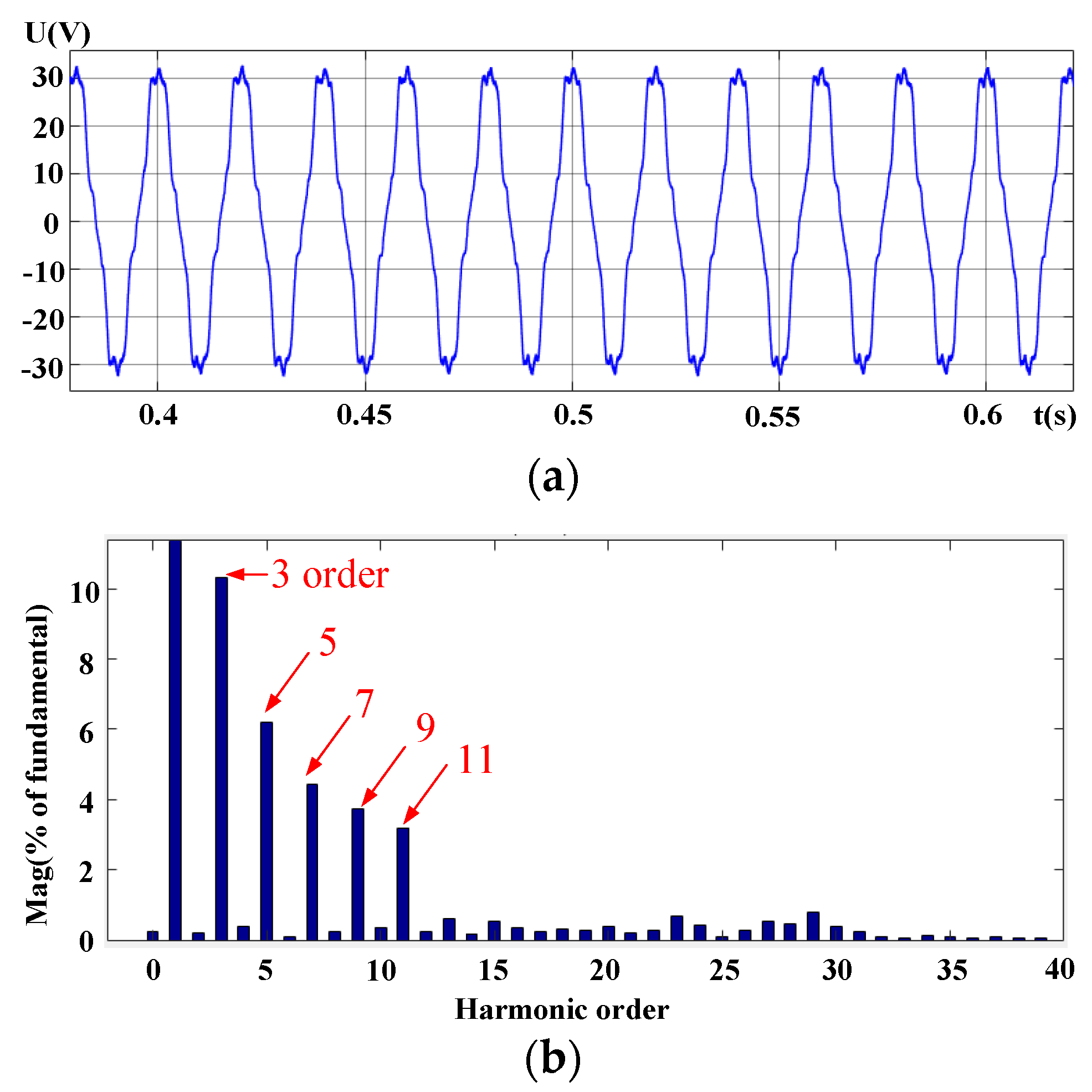
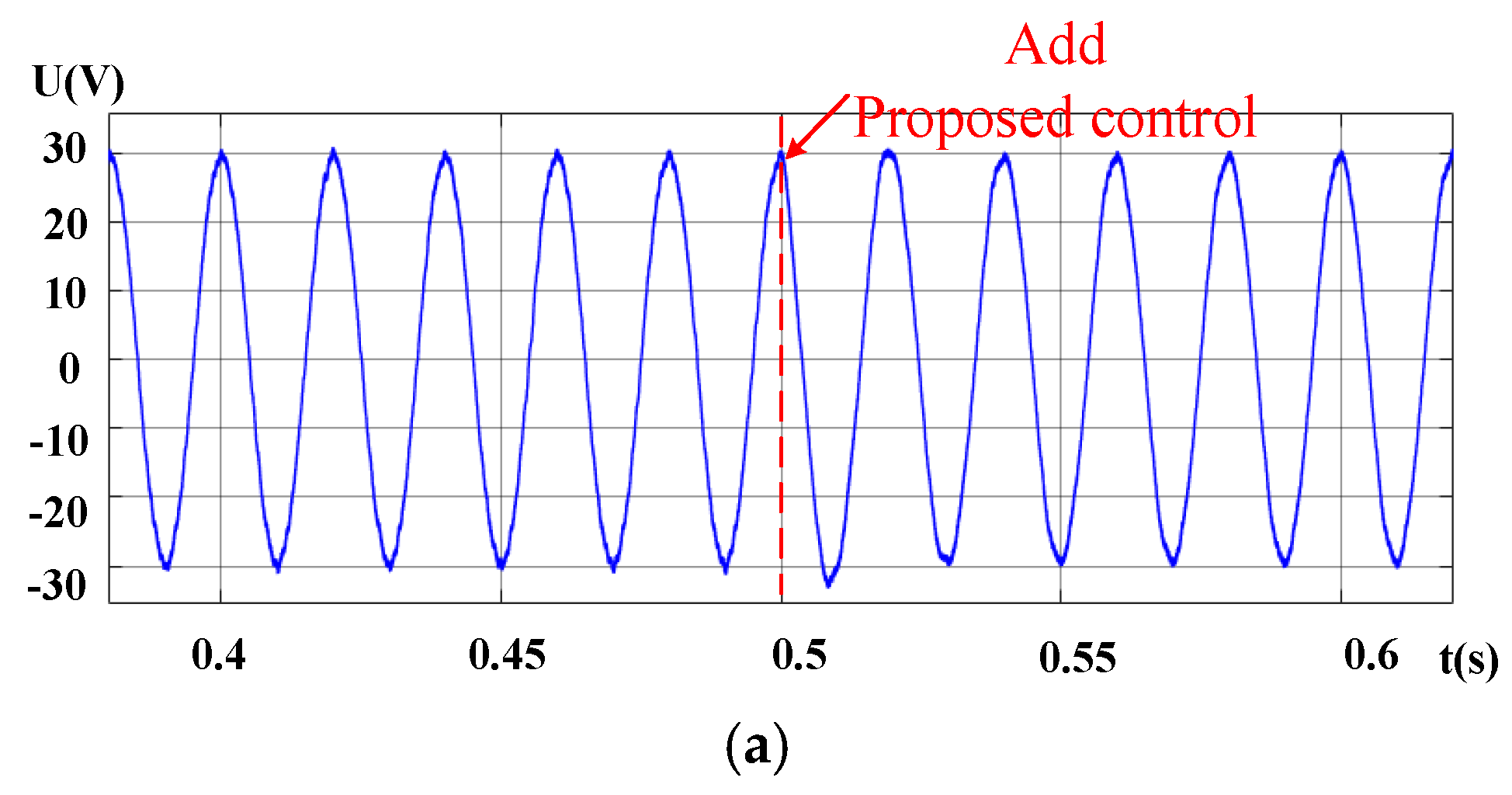
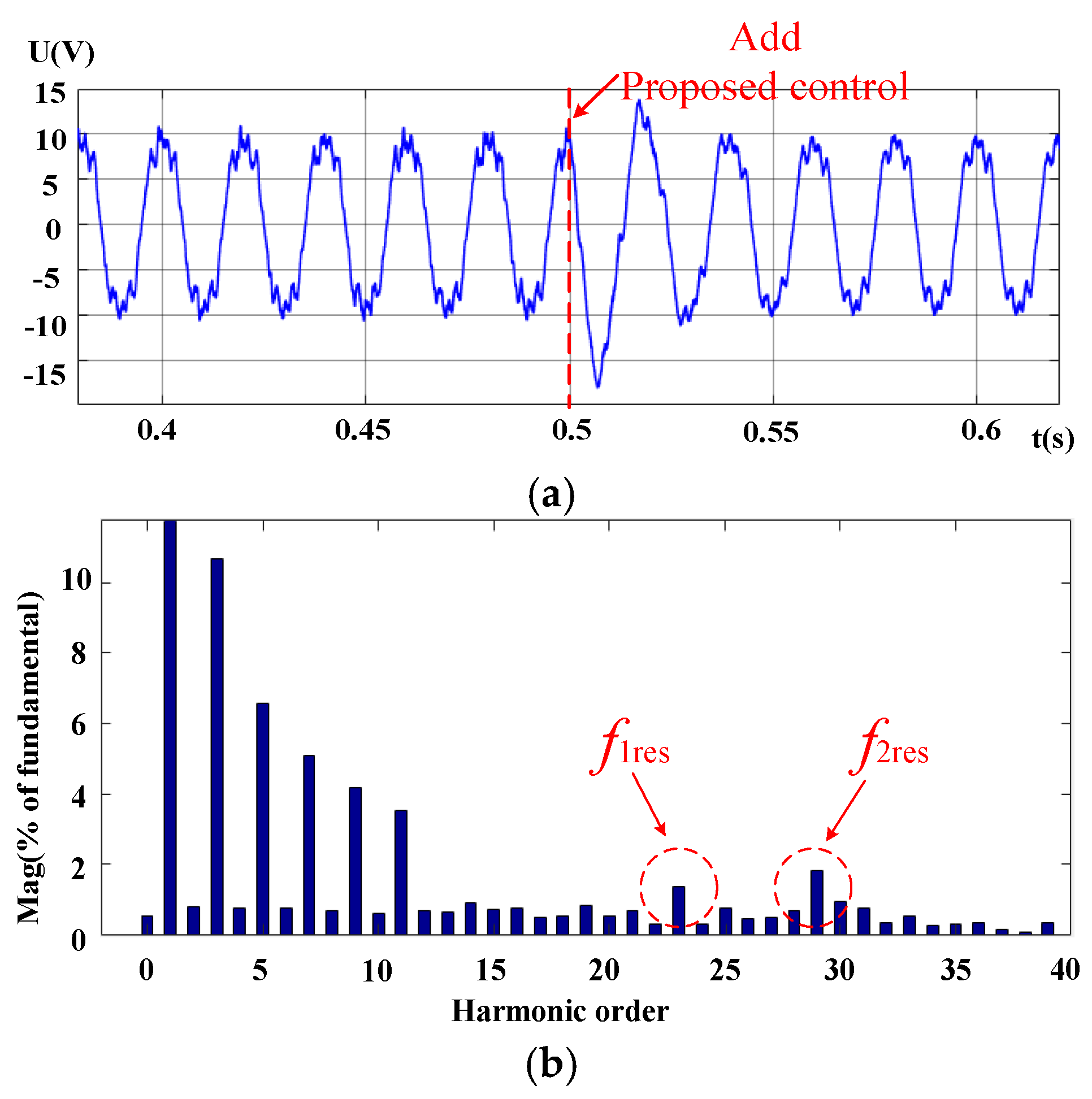
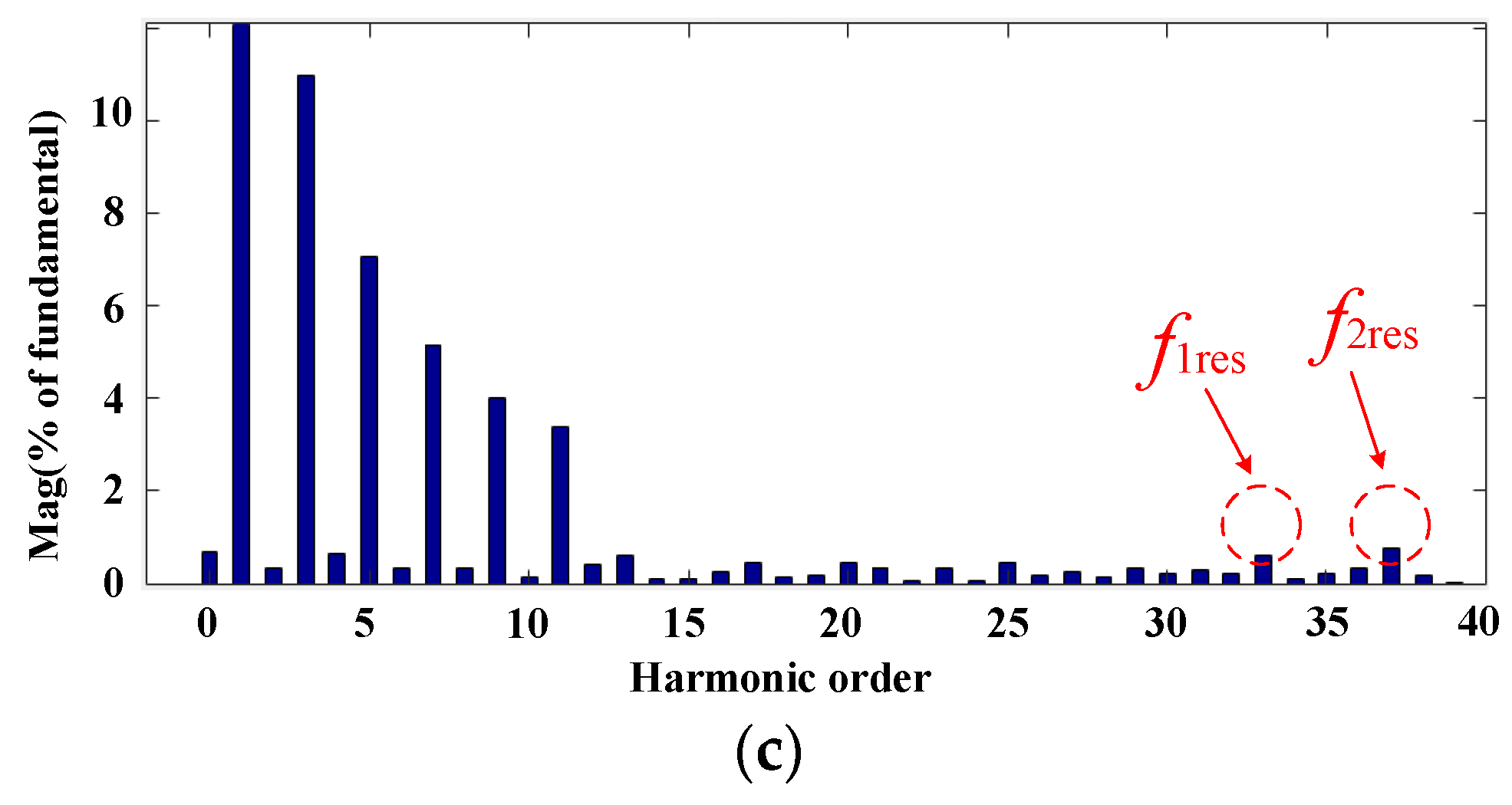
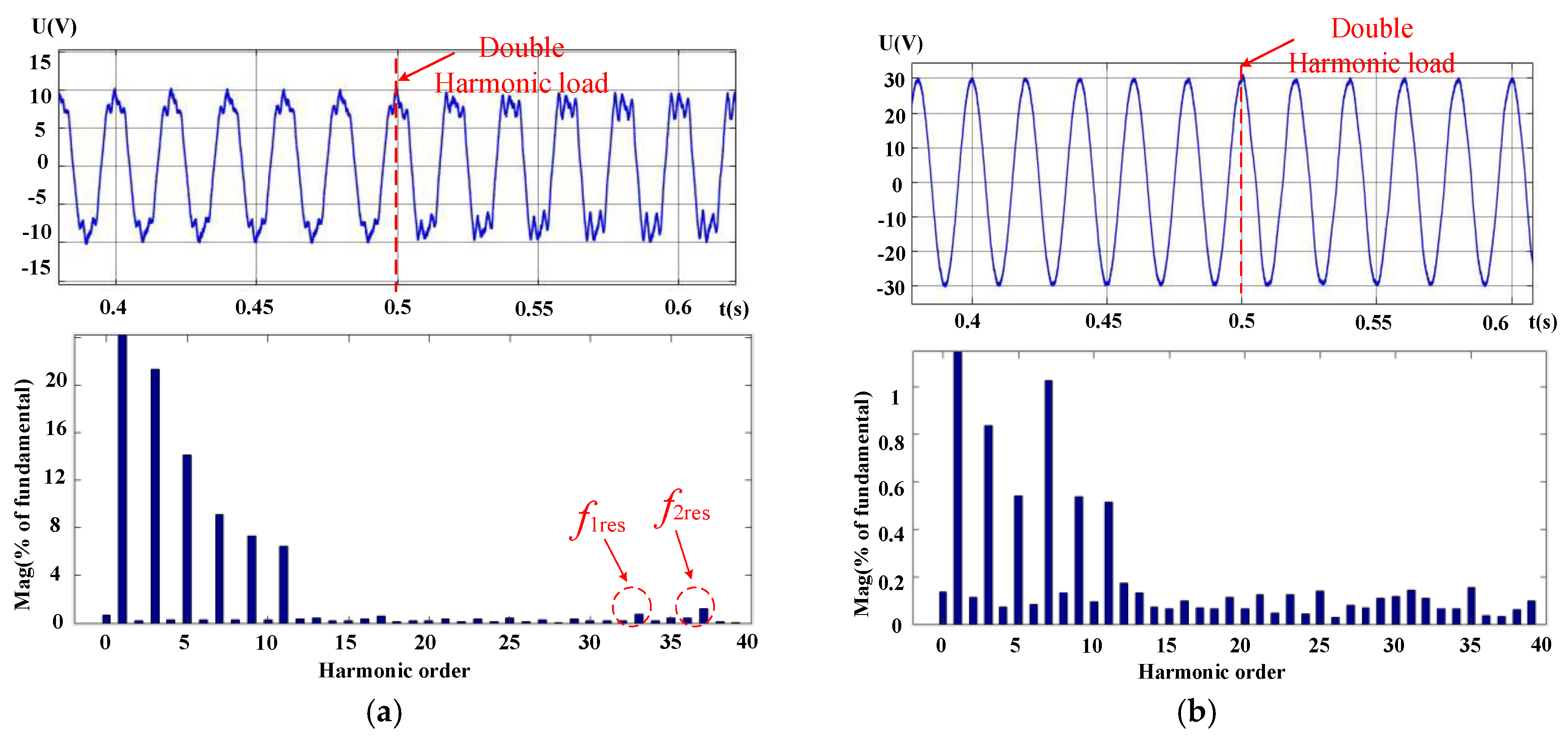
4.1.1. Low-order Harmonic Results
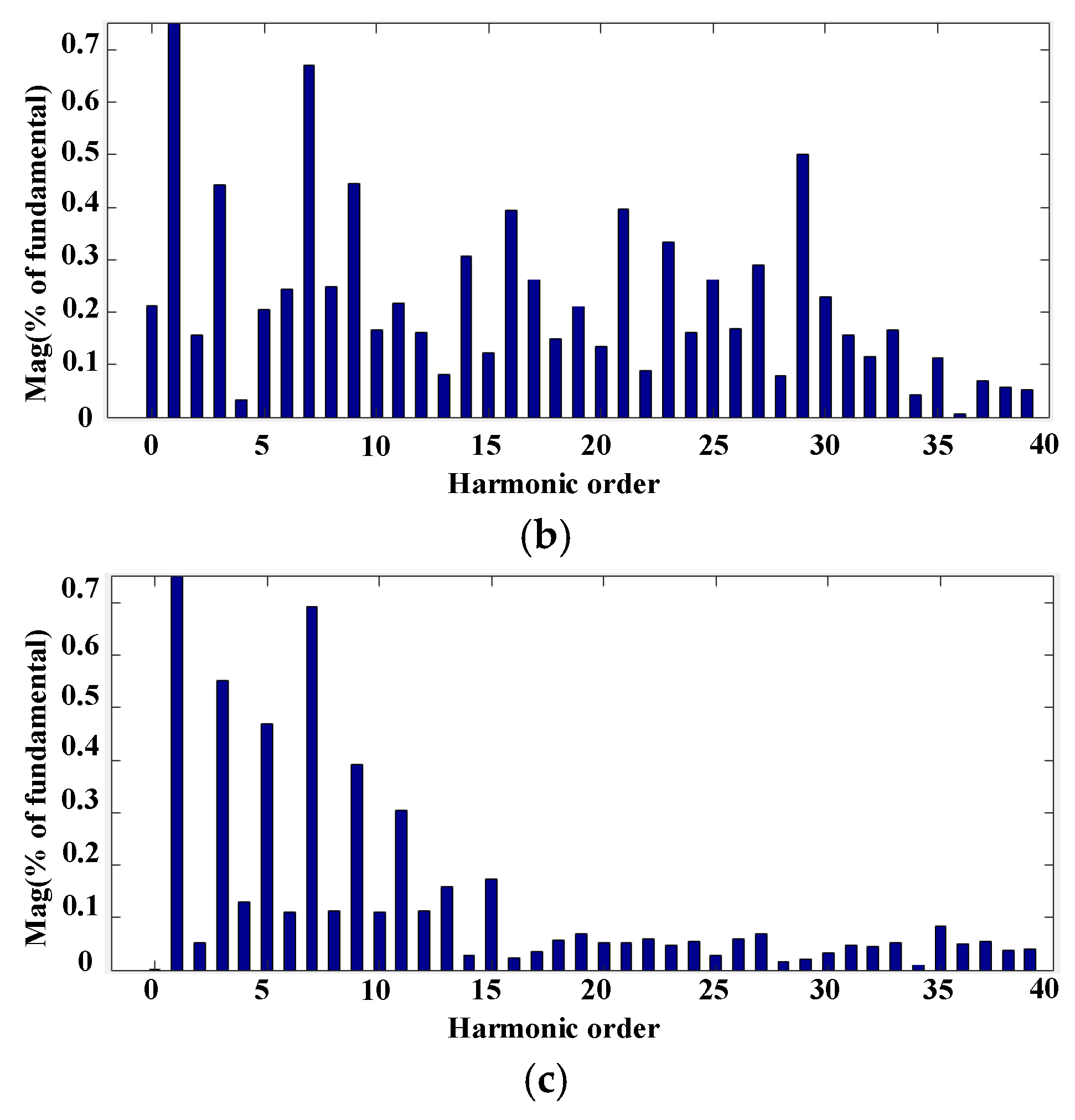
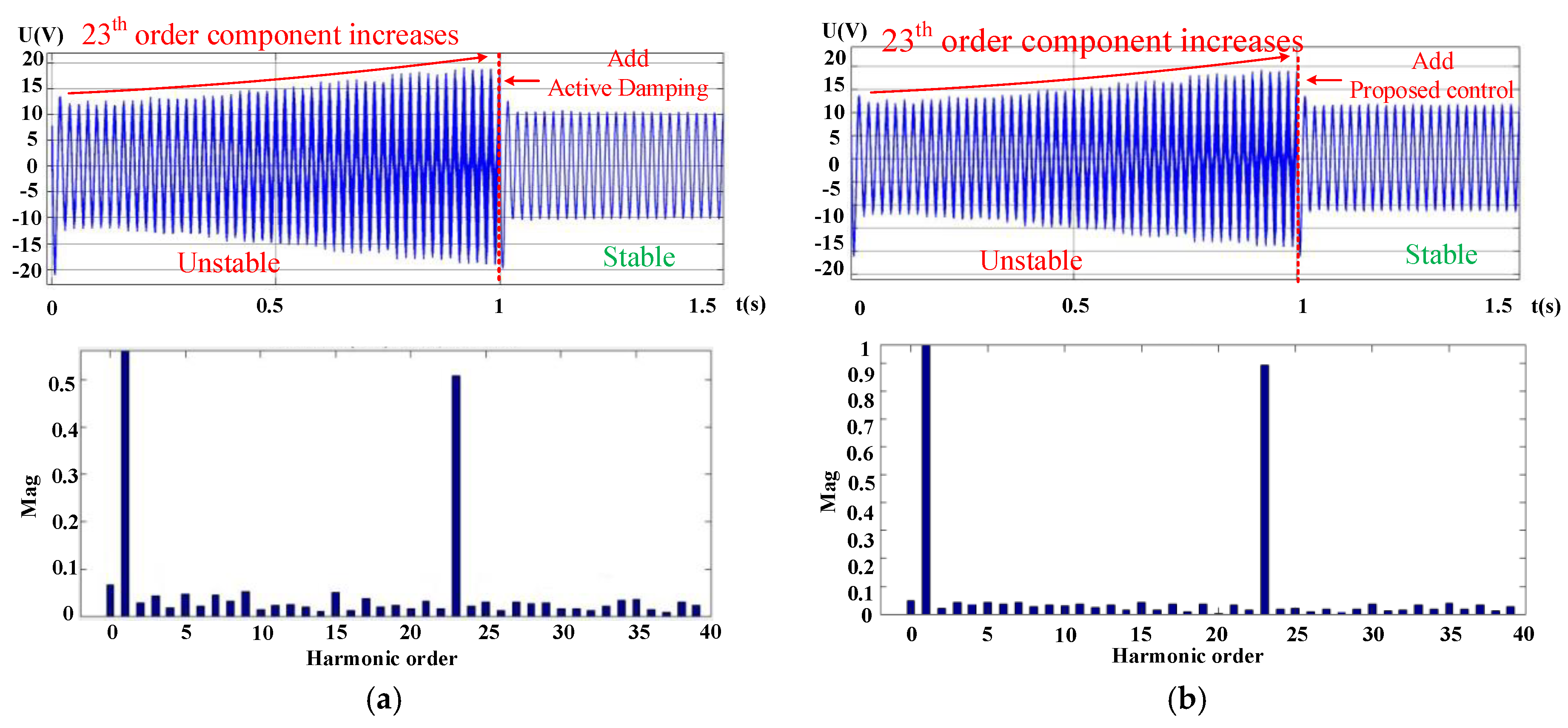
4.1.2. High-order Harmonic Results
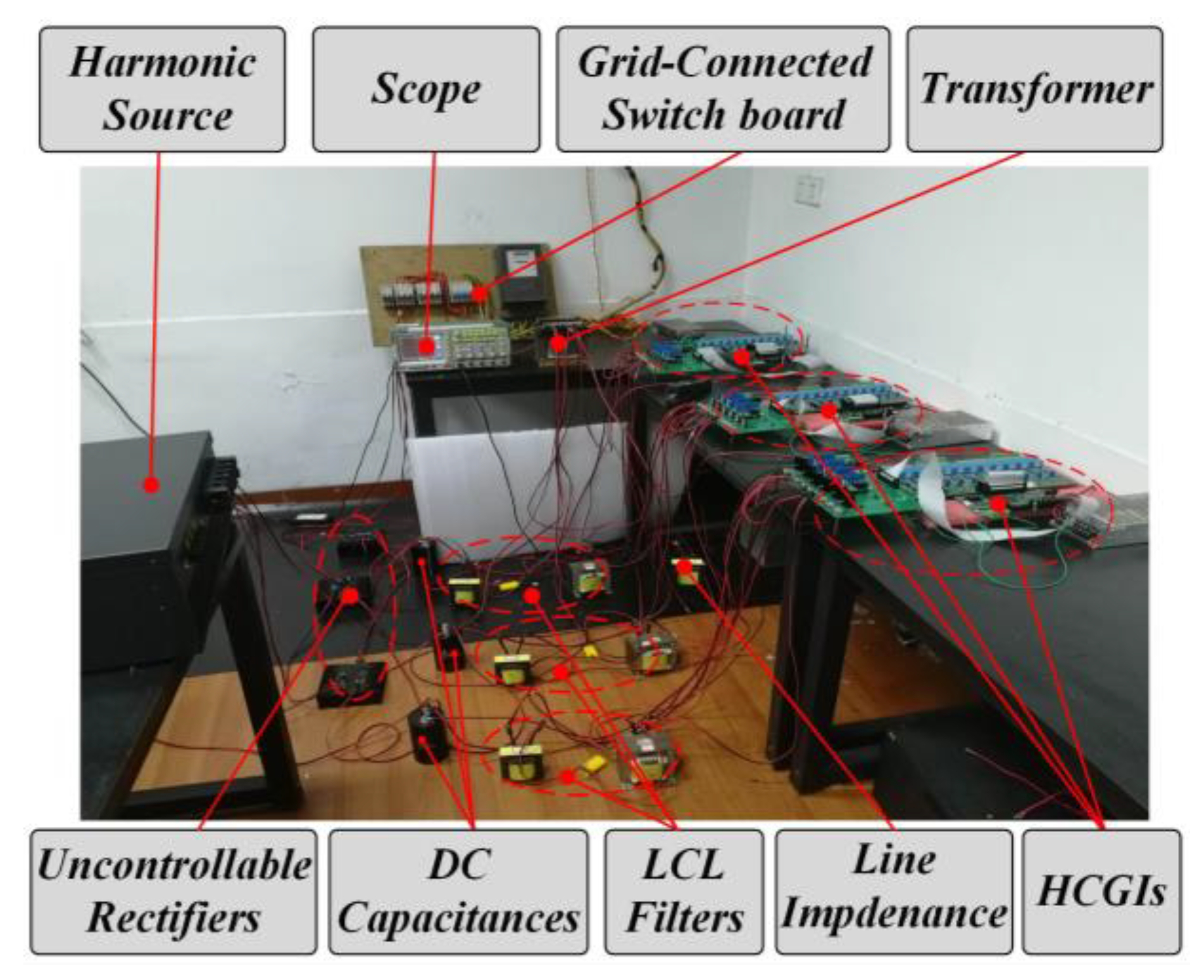
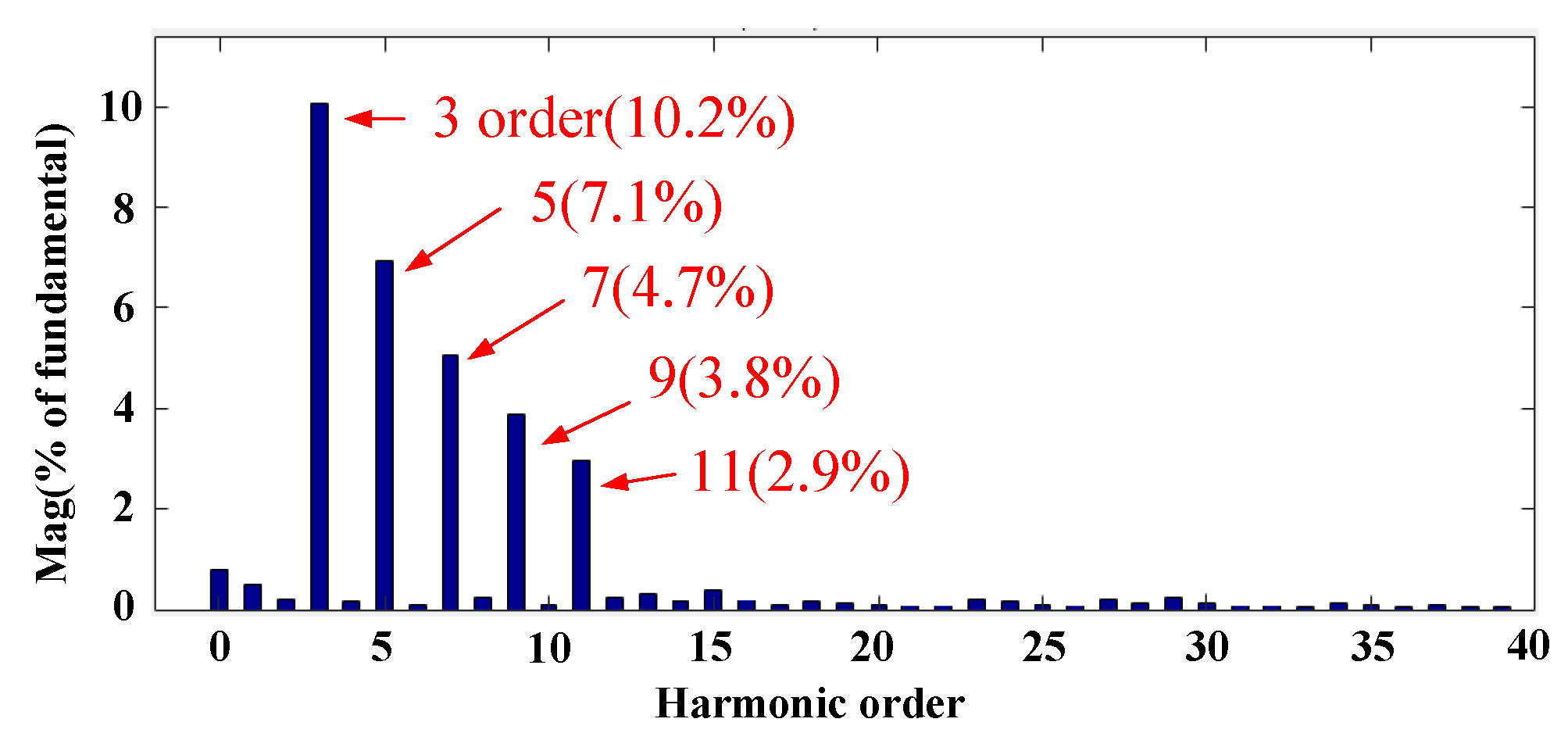
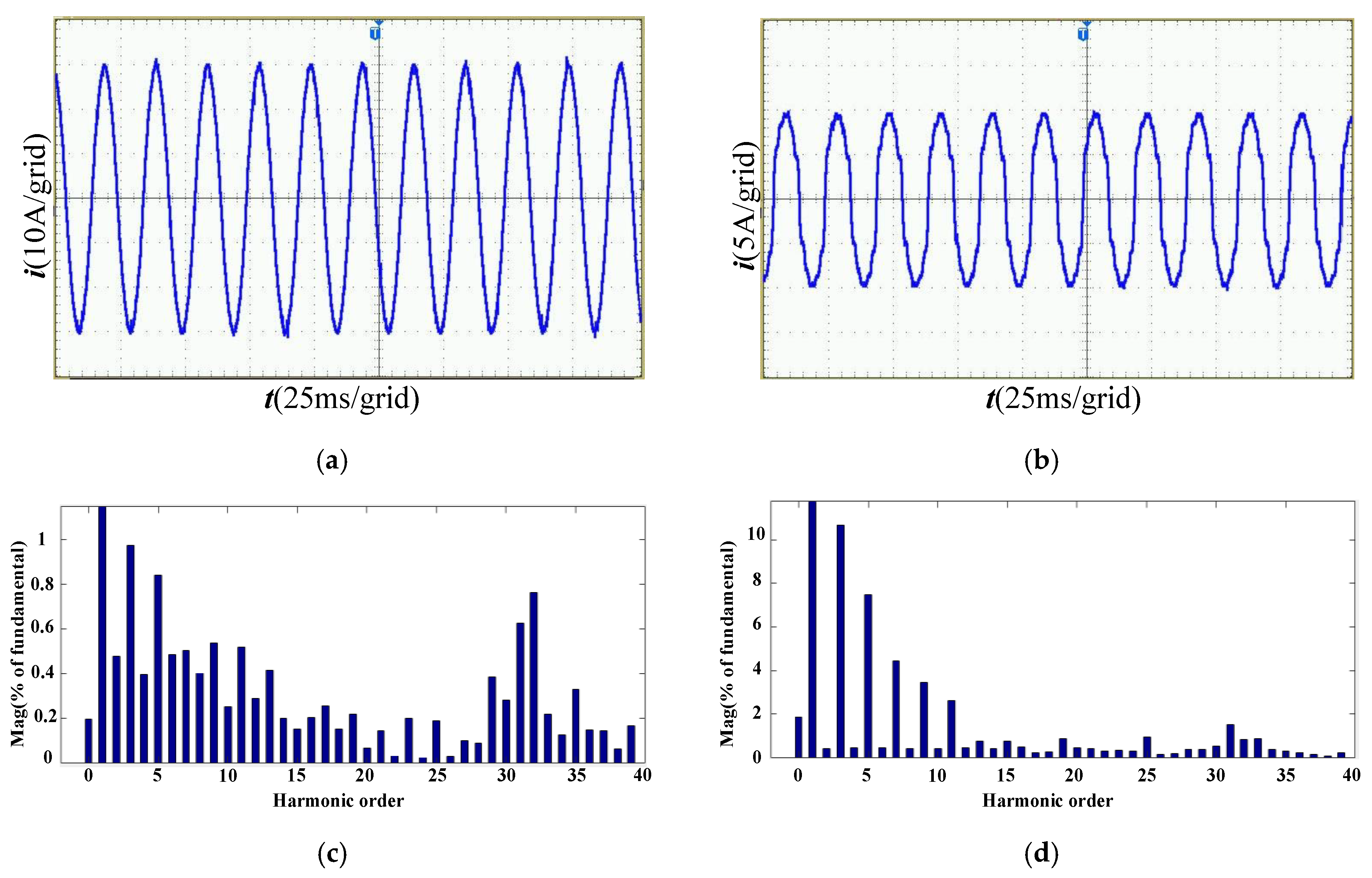
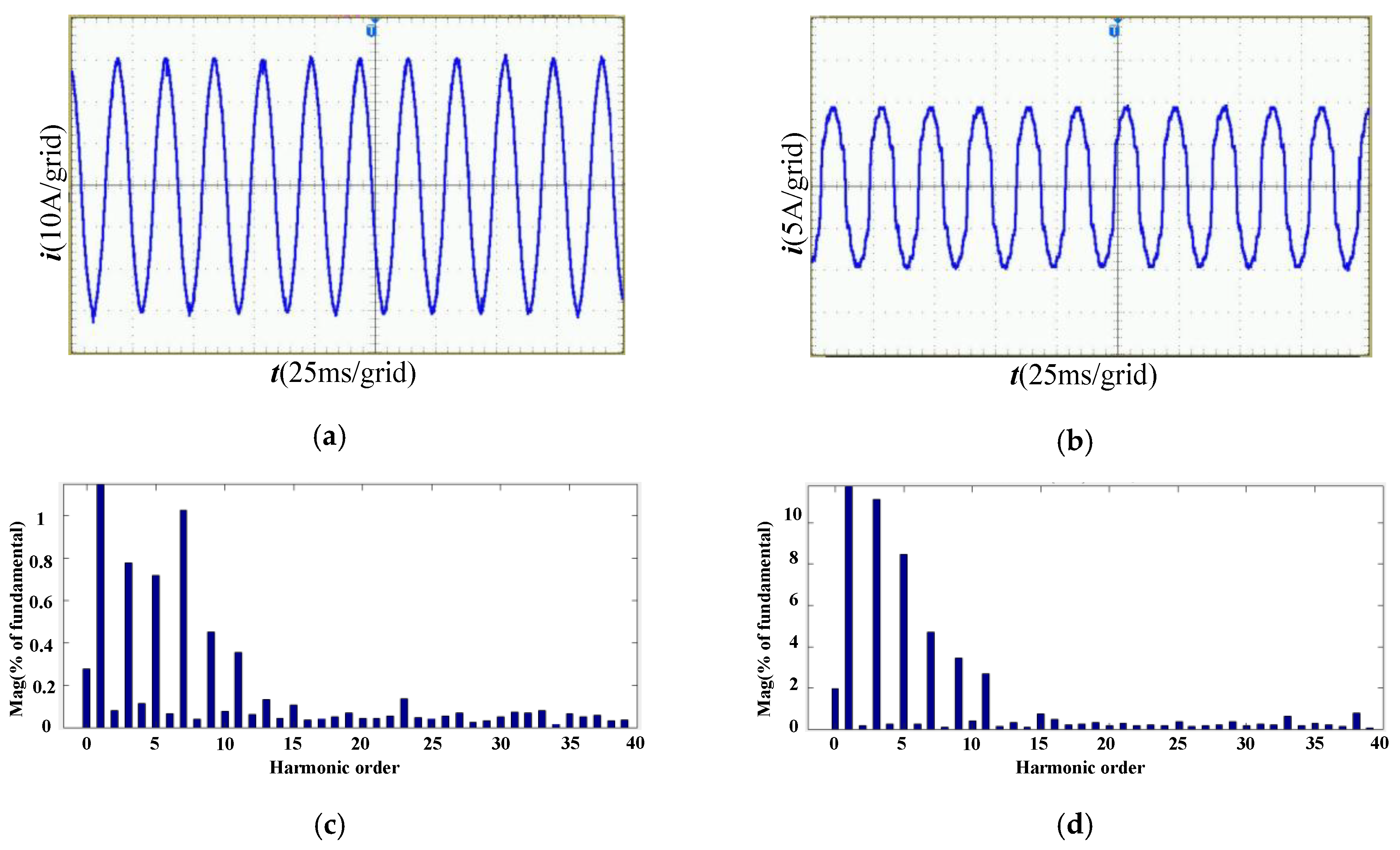
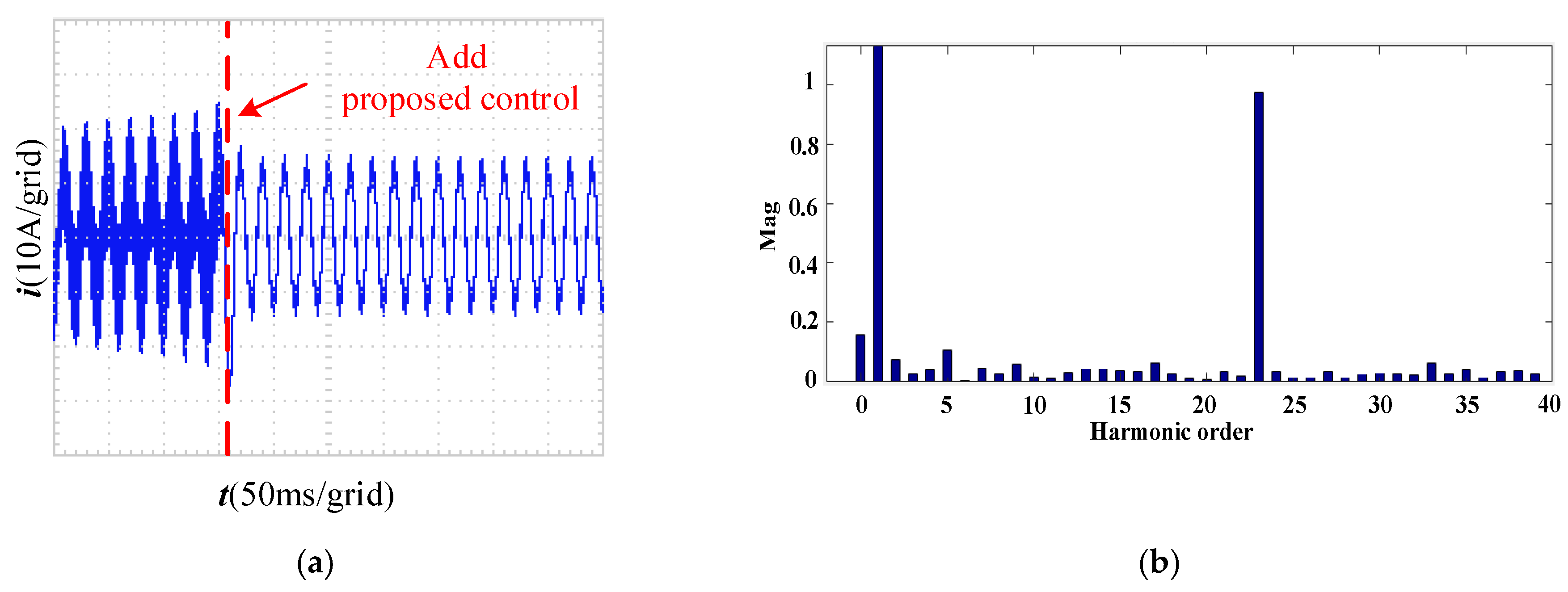
4.2. Experimental Validation
5. Conclusions
- (1)
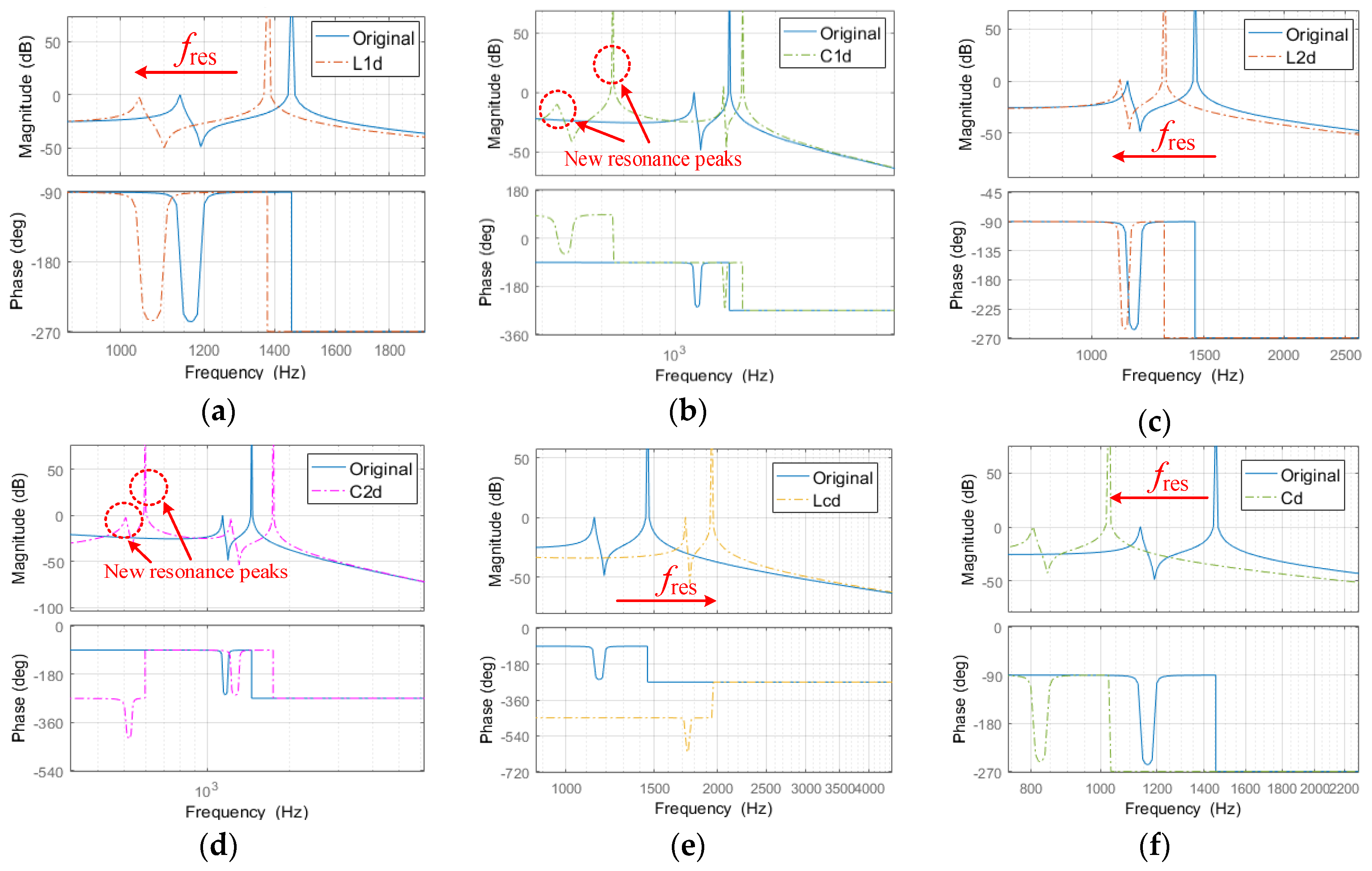
- The new resonance point in multi-parallel HCGIs systems decreases the control bandwidth, thus the maximum compensation harmonic frequency of HCGIs would be limited.
- (2)
- The active damping by virtual resistance to suppress resonances peak will influence the high-frequency harmonic current compensation, and the influence becomes large when the harmonic frequency approaches the LCL resonance frequency.
- (3)
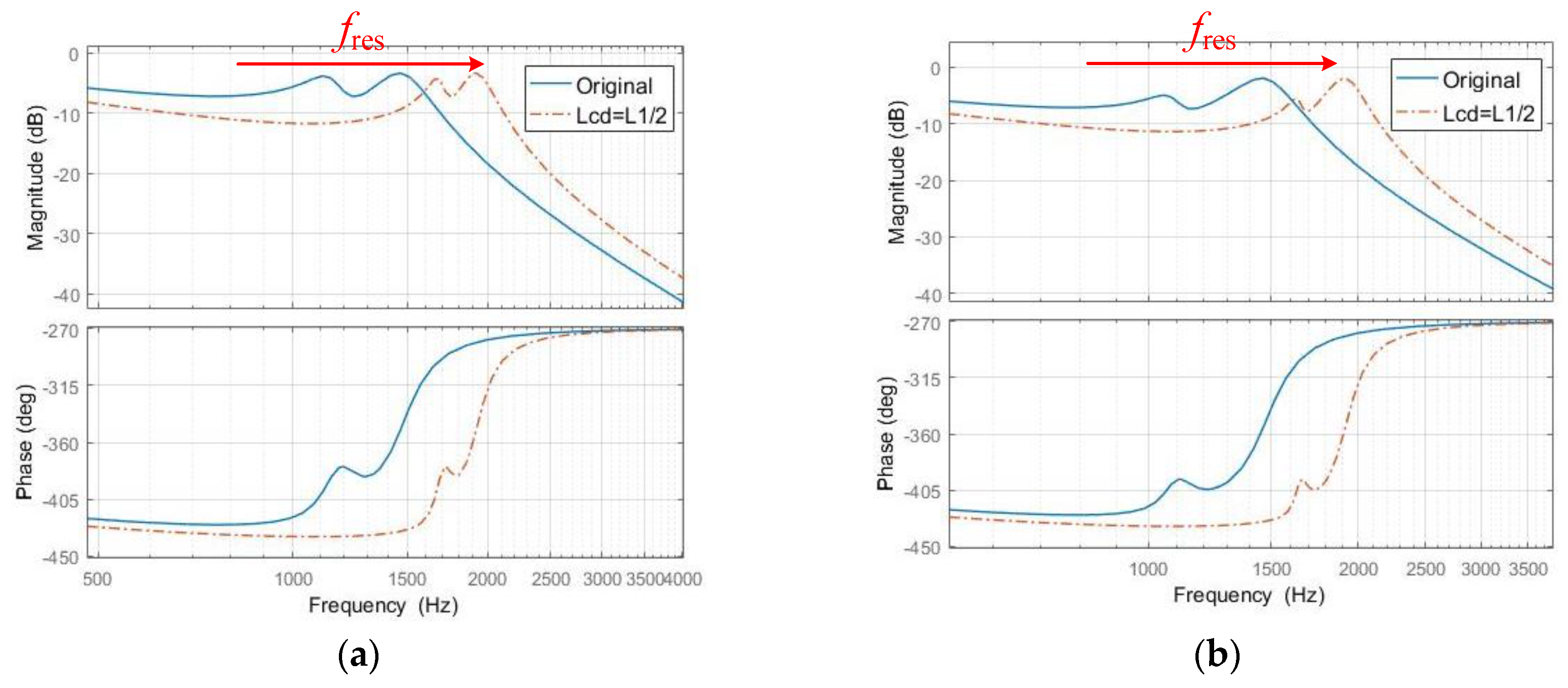
- The proposed bandwidth control method can effectively shift resonance frequencies right, and thus it solves the bandwidth reduction issue in multi-parallel HCGIs system.
- (4)
- The bandwidth control method proposed in this paper can also solve other bandwidth issues limited by resonant frequencies for grid-connected inverters.
Author Contributions
Funding
Conflicts of Interest
References
- Sun, Y.; Hou, X.; Yang, J.; Han, H.; Su, M.; Guerrero, J.M. New perspectives on droop control in AC microgrid. IEEE Trans. Ind. Electron. 2017, 64, 5741–5745. [Google Scholar] [CrossRef]
- Zhang, N.; Tang, H.; Yao, C. A Systematic Method for Designing a PR Controller and Active Damping of the LCL Filter for Single-Phase Grid-Connected PV Inverters. Energies 2014, 7, 3934–3954. [Google Scholar] [CrossRef] [Green Version]
- Song, D.R.; Fan, X.; Yang, J.; Liu, A.; Chen, S.; Joo, Y. Power extraction efficiency optimization of horizontal-axis wind turbines through optimizing control parameters of yaw control systems using an intelligent method. Appl. Energy 2018, 224, 267–279. [Google Scholar] [CrossRef]
- Liu, Z.; Su, M.; Sun, Y. Optimal criterion and global/sub-optimal control schemes of decentralized economical dispatch for AC microgrid. Int. J. Electrical Power Energy Syst. 2019, 104, 38–42. [Google Scholar] [CrossRef]
- Fadia, S.; Hani, V.; Youssef, K.H. Experimental Design of Fixed Switching Frequency Model Predictive Control for Sensor-Less Five-Level Packed U-Cell Inverter. IEEE Trans. Ind. Electron. 2018, 66, 3427–3434. [Google Scholar]
- Song, D.; Yang, J.; Fan, X.; Liu, Y.; Liu, A.; Chen, G.; Joo, Y.H. Maximum power extraction for wind turbines through a novel yaw control solution using predicted wind directions. Energy Convers. Manag. 2018, 157, 589–599. [Google Scholar] [CrossRef]
- Song, D.; Li, Q.; Cai, Z. Model predictive control using multi-step prediction model for electrical yaw system of horizontal-axis wind turbines. IEEE Trans. Sustain. Energy 2018. accepted. [Google Scholar] [CrossRef]
- Vahedi, H.; Labbe, P.A.; Al-Haddad, K. Sensor-Less Five-Level Packed U-Cell Inverter Operating in Stand-Alone and Grid-Connected Modes. IEEE Trans. Ind. Inform. 2016, 12, 361–370. [Google Scholar] [CrossRef]
- Song, D.; Yang, J.; Cai, Z.L.; Dong, M.; Joo, Y.H. Model predictive control with finite control set for variable-speed wind turbines. Energy 2017, 126, 564–572. [Google Scholar] [CrossRef]
- Khan, S.; Zhang, X.; Saad, M. Comparative Analysis of 18-Pulse Auto transformer Rectifier Unit Topologies with Intrinsic Harmonic Current Cancellation. Energies 2018, 11, 1347. [Google Scholar] [CrossRef]
- Zhou, N.C.; Lou, X.X.; Yu, D. Harmonic Injection-Based Power Fluctuation Control of Three-Phase PV Systems under Unbalanced Grid Voltage Conditions. Energies 2015, 8, 1390–1405. [Google Scholar] [CrossRef] [Green Version]
- Hossain, J.; Rafi, F.; Town, G. A Multifunctional Three-Phase Four-Leg PV-SVSI with Dynamic Capacity Distribution Method. IEEE Trans. Ind. Inform. 2018, 99, 2507–2520. [Google Scholar] [CrossRef]
- Ye, T.; Dai, N.Y.; Lam, C.S. Analysis, Design, and Implementation of a Quasi-Proportional-Resonant Controller for a Multifunctional Capacitive-Coupling Grid-Connected Inverter. IEEE Trans. Ind. Appl. 2016, 52, 4269–4280. [Google Scholar] [CrossRef]
- Morales-Paredes, H.K.; Bonaldo, J.P.; Pomilio, J.A. Centralized Control Center Implementation for Synergistic Operation of Distributed Multifunctional Single-Phase Grid-Tie Inverters in a Microgrid. IEEE Trans. Ind. Electron. 2018, 65, 8018–8029. [Google Scholar] [CrossRef]
- Zheng, Z.; Zhao, R.; Yang, H. A Multi-Functional Grid-Connected Inverter and Its Application to Customized Power Quality of Microgrid. Power Syst. Technol. 2012, 36, 58–67. [Google Scholar]
- Li, X.Y.; Li, Y.L.; Zhang, W.Y. A Power Quality Control Strategy Based on Multi-Functional Grid-Connected Inverter. Power Syst. Technol. 2015, 39, 556–562. [Google Scholar]
- Zeng, Z.; Li, H.; Tang, S. Multi-objective control of multi-functional grid-connected inverter for renewable energy integration and power quality service. IET Power Electron. 2016, 9, 761–770. [Google Scholar] [CrossRef]
- Tang, S.; Zheng, Z.; Chong, C. Wireless Coordination Control of Multi-functional Grid-tied Inverters in Microgrid. Autom. Electr. Power Syst. 2015, 39, 200–207. [Google Scholar]
- Agorreta, J.L.; Borrega, M.; López, J. Modeling and Control of N-Paralleled Grid-Connected Inverters with LCL Filter Coupled Due to Grid Impedance in PV Plants. IEEE Trans. Power Electron. 2011, 26, 770–785. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Bosnjak, D. Investigation and Active Damping of Multiple Resonances in a Parallel-Inverter-Based Microgrid. IEEE Trans. Power Electron. 2013, 28, 234–246. [Google Scholar] [CrossRef]
- Zeng, Z.; Zhao, R.X.; Lv, Z.P. Impedance Reshaping of Grid-tied Inverters to Damp the Series and Parallel Harmonic Resonances of Photovoltaic Systems. Proc. Csee 2014, 34, 4547–4558. [Google Scholar]
- Kuang, H.; An, L.; Chen, Z. Coupling Resonances Mechanism of Grid-Connected Multi-Parallel Inverters and Its Active Damping Parameter Optimal Method. Power Syst. Technol. 2016, 40, 1180–1189. [Google Scholar]
- Lu, X.N.; Sun, K.; Huang, L.P. Active Damping Method Based on Bi-Quad Filter for Microgrid Applications. Trans. China Electrotech. Soc. 2013, 28, 261–268. [Google Scholar]
- Zhang, S.; Jiang, S.; Lu, X. Resonance issues and damping techniques for grid-connected inverters with long transmission cable. IEEE Trans. Power Electron. 2013, 29, 110–120. [Google Scholar] [CrossRef]
- Hu, W.; Sun, J.; Ma, Q. Modeling and resonant characteristics analysis of multiple paralleled grid-connected inverters with LCL filter. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition, Pittsburgh, PA, USA, 14–18 September 2014; pp. 3371–3377. [Google Scholar]
- Turner, R.; Walton, S.; Duke, R. Stability and Bandwidth Implications of Digitally Controlled Grid-Connected Parallel Inverters. IEEE Trans. Ind. Electron. 2010, 11, 3685–3694. [Google Scholar] [CrossRef]
- Parker, S.G.; Mcgrath, B.P.; Holmes, D.G. Regions of active damping control for LCL filters. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition, Raleigh, NC, USA, 15–20 September 2012; pp. 53–60. [Google Scholar]
- Wang, J.; Yan, J.D.; Jiang, L. Delay-Dependent Stability of Single-Loop Controlled Grid-Connected Inverters with LCL Filters. IEEE Trans. Power Electron. 2015, 31, 743–757. [Google Scholar] [CrossRef]
- Wang, X.; Loh, P.C.; Blaabjerg, F. Stability Analysis and Controller Synthesis for Single-Loop Voltage-Controlled VSIs. IEEE Trans. Power Electron. 2017, 32, 7394–7404. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Xie, S.; Zhang, B. Robust Grid Current Control with Impedance-Phase Shaping for LCL-Filtered Inverters in Weak and Distorted Grid. IEEE Trans. Power Electron. 2018, 99, 10240–10250. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Blaabjerg, F. An Enhanced Islanding Microgrid Reactive Power, Imbalance Power, and Harmonic Power Sharing Scheme. IEEE Trans. Power Electron. 2015, 30, 3389–3401. [Google Scholar] [CrossRef]
- Ruan, X.; Wang, X.; Pan, D.; Yang, D. Control Techniques for LCL-Type Grid-Connected Inverters, 1st ed.; Science Press Beijing: Beijing, China, 2018; pp. 79–94. ISBN 978-7-03-043810-2. [Google Scholar]
- Yang, Y.; Zhou, K.; Blaabjerg, F. Current harmonics from single-phase grid-connected inverters—Examination and suppression. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 221–233. [Google Scholar] [CrossRef]
- Malinowski, M.; Bernet, S. A Simple Voltage Sensorless Active Damping Scheme for Three-Phase PWM Converters with an Filter. IEEE Trans. Ind. Electron. 2008, 55, 1876–1880. [Google Scholar] [CrossRef]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Symbol | Value |
|---|---|---|---|
| L1/mH | 3 | Ug/V | 220 |
| Cf/μF | 10 | Udc/V | 400 |
| L2/mH | 2 | Rg/Ω | 0.2 |
| Lg/mH | 1.2 | fs/kHz | 20 |
| n | 1 | 2 | 3 | 6 |
|---|---|---|---|---|
| fres1 (Hz) | / | 1251 | 1149 | 1082 |
| fres2 (Hz) | 1279 | 1453 | 1453 | 1453 |
| Symbol | Value | Symbol | Value |
|---|---|---|---|
| L1d/mH | 1.5 | C1d/μF | 10 |
| L2d/mH | 1 | C2d/μF | 10 |
| Lcd/mH | 1.5 | Cd/μF | 10 |
| Feedback Signal | uc | ic |
|---|---|---|
| Expected Direction | ||
|---|---|---|
| Bandwidth improvement (Resonance peaks shift right) | ↑ | - |
| Resonance peaks suppression | - | ↑ |
| High-frequency harmonics compensation effect | ↓ | ↓ |
| Expectation | |||
|---|---|---|---|
| Bandwidth improvement (fres > fB) | - | >0.48 | - |
| Resonance peaks suppression ( < , < ) | >2.2 × 10−4 | - | >1 + 0.83 × 10−4 |
| The 19th and 25th order harmonics compensation effect ( > , > ) | <1.4 × 10−4 | <1.63 | <1 + 1.12 × 10−4 |
| Symbol | Value | Symbol | Value | Chip Name | Corporation | Chip Model |
|---|---|---|---|---|---|---|
| L1/mH | 2.8 | Ug/V | 110 | DSP | TI | TMS320F28335 |
| Cf/μF | 10 | Lg/mH | 1.2 | CPLD | XILINX | XC9572XL |
| L2/mH | 1.8 | fs/kHz | 20 | ADC | ANALOG DEVICES | AD7580 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Deng, L.; Song, D.; Pei, M. Wide Bandwidth Control for Multi-Parallel Grid-Connected Inverters with Harmonic Compensation. Energies 2019, 12, 571. https://doi.org/10.3390/en12030571
Yu J, Deng L, Song D, Pei M. Wide Bandwidth Control for Multi-Parallel Grid-Connected Inverters with Harmonic Compensation. Energies. 2019; 12(3):571. https://doi.org/10.3390/en12030571
Chicago/Turabian StyleYu, Jingrong, Limin Deng, Dongran Song, and Maolin Pei. 2019. "Wide Bandwidth Control for Multi-Parallel Grid-Connected Inverters with Harmonic Compensation" Energies 12, no. 3: 571. https://doi.org/10.3390/en12030571
APA StyleYu, J., Deng, L., Song, D., & Pei, M. (2019). Wide Bandwidth Control for Multi-Parallel Grid-Connected Inverters with Harmonic Compensation. Energies, 12(3), 571. https://doi.org/10.3390/en12030571