Multi-Level Open End Windings Multi-Motor Drives

 , and
, and 
Abstract
:1. Introduction
2. Open Winding Multiple Motors Fed by a Single Multi-Level Converter—MMSC
3. Open Winding Multiple Motors Fed by Multiple Multi-Level Converters—MMMC
4. Power Losses Assessment
5. Experimental Tests
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| MMD | Multiple Motor Drive |
| MMSC | Multiple Motors fed by a Single Converter |
| MMMC | Multiple Motors fed by Multiple Converters |
| IFOC | Indirect Field Oriented Control |
| TLI | Two-Level Inverter |
| 3LI | Three-Level inverter |
| TLI5 | Five-leg two level inverter |
| 3LI+TLI | OW configuration including 3LI and TLI |
| 3LI+TLI5 | OW configuration including 3LI and TLI5 |
| 5LI+TLI | OW configuration including 5LI and TLI |
| 5LI+TLI5 | OW configuration including 5LI and TLI5 |
| THD | Total Harmonic Distortion |
| n | MLI voltage levels |
| VMLI_stepi | i-phase MLI output voltage with respect to n′ |
| VTLIi | i-phase TLI output voltage with respect to n″ |
| Vmi | i-phase motor voltage |
| VDC′ | MLI DC Bus voltage |
| VDC″ | TLI DC Bus voltage |
| Vmpk | Peak motor voltage |
| iabc1 | abc axes IM1 phase currents |
| iabc2 | abc axes IM2 phase currents |
| Eqd | qd axes motor back EMF |
| iqd1 | qd axes IM1 phase currents |
| iqd2 | qd axes IM1 phase currents |
| VqdMLI | qd axes MLI output voltage |
| Rs, Rr | Stator and rotor resistance |
| Rfe | Iron resistance |
| Ls, Lr | Stator and rotor inductances |
| Lm | Magnetizing inductance |
| ωλre | Rotor flux angular frequency |
| KV | Voltage ratio VDC″/VDC′ |
| Kp | Vmpk/(VDC′ *THDV) |
| ωr | Mechanical Rotor speed |
| ωre | Electrical Rotor speed |
| θλr1, θλr2 | Rotor flux angular positions of IM1 and IM2 |
| θr | Rotor angular positions of IM1 and IM2 |
| Te1n, Te2n | Rated torques of IM1 and IM2 |
| J | Total inertia of motor and load |
| pp | pole pairs |
| Vceo | Collector to Emitter Saturation Voltage |
| ton | Current Turn-On Delay Time |
| toff | Current Turn-Off Delay Time |
| VCES | Collector to Emitter Breakdown Voltage |
| IC | Collector current |
| VDSS | Drain-to-Source Breakdown Voltage |
| IDSS | Drain-to-Source Leakage Current |
| RDS(on) | Static Drain-to-Source On-Resistance |
| Piron | Motor iron losses |
| Pjoule | Motor joule losses |
| PCMLI | MLI conduction losses |
| PswMLI | MLI switching losses |
| PCTLI | TLI conduction losses |
| PswTLI | TLI switching losses |
| δ | Duty cycle of the 3LI |
| fswMLI | Switching frequency of the 3LI |
| fswTLI | Switching frequency of the TLI |
References
- Levi, E.; Jones, M.; Vukosavic, S.N.; Toliyat, H.A. A novel concept of a multiphase, multimotor vector controlled drive system supplied from a single voltage source inverter. IEEE Trans. Power Electron. 2004, 19, 320–335. [Google Scholar] [CrossRef]
- Jeftenic, B.; Bebic, M.; Statkic, S. Controlled multi-motor drives. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion SPEEDAM, Taormina, Italy, 23–26 May 2006; pp. 1392–1398. [Google Scholar]
- Iyer, J.; Tabarraee, K.; Chiniforoosh, S.; Jatskevich, J. An improved V/F control scheme for symmetric load sharing of multi-machine induction motor drives. In Proceedings of the Canadian Conference on Electrical and Computer Engineering (CCECE), Niagara Falls, ON, Canada, 8–11 May 2011; pp. 1487–1490. [Google Scholar]
- Pulvirenti, M.; Scarcella, G.; Scelba, G.; Cacciato, M.; Testa, A. FaultTolerant AC Multidrive System. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 224–235. [Google Scholar] [CrossRef]
- Scelba, G.; Scarcella, G.; Pulvirenti, M.; Cacciato, M.; Testa, A.; de Caro, S.; Scimone, T. Current-Sharing Strategies for Fault-Tolerant AC Multidives. IEEE Trans. Ind. Appl. 2015, 51, 3943–3953. [Google Scholar] [CrossRef]
- Slutej, A.; Kolonic, F.; Jakopovic, Z. The new crane motion control concept with integrated drive controller for engineered crane application. In Proceedings of the IEEE International Symposium on Industrial Electronics, ISIE, Bled, Slovenia, 12–16 July 1999; pp. 1458–1461. [Google Scholar]
- Mitrovic, N.; Petronijevic, M.; Kostic, V.; Jeftenic, B. Electrical Drives for Crane Application, Mechanical Engineering; Gokcek, M., Ed.; InTech: London, UK, 2012; ISBN 978-953-51-0505-3. [Google Scholar]
- Foti, S.; Testa, A.; de Caro, S.; Scimone, T.; Pulvirenti, M. Sensorless field oriented control of multiple-motors fed by multiple-converters systems. In Proceedings of the IEEE International Symposium on Sensorless Control for Electrical Drives (SLED), Catania, Italy, 18–19 September 2017; pp. 237–242. [Google Scholar]
- Matsumoto, Y.; Ozaki, S.; Kawamura, A. A novel vector control of single-inverter multiple-induction-motors drives for Shinkansen traction system. In Proceedings of the 16th Annual Applied Power Electronics Conference and Exposition, (APEC 2001), Anaheim, CA, USA, 4–8 March 2001; pp. 608–614. [Google Scholar]
- Peña-Eguiluz, R.; Pietrzak-David, M.; DeFornel, B. Comparison of several control strategies for parallel connected dual induction motors. In Proceedings of the VIII IEEE International Power Electronics Congress, 2002. Technical Proceedings. CIEP 2002, Guadalajara, Mexico, 24–24 October 2002. [Google Scholar]
- Mabrouk, W.B.; Belhadj, J.; Pietrzak-David, M. Synthesis and Analysis of one Bogie Induction Railway Traction System. In Proceedings of the on 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009; pp. 1–9. [Google Scholar]
- Achour, T.; Pietrzak-David, M. Service Continuity of an IM Distributed Railway Traction with a Speed Sensor Fault. In Proceedings of the 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–8. [Google Scholar]
- Cui, S.; Han, S.; Chan, C. Overview of multi-machine drive systems for electric and hybrid electric vehicles. In Proceedings of the IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–6. [Google Scholar]
- Arnet, B.; Jufer, M. Torque control on electric vehicles with separate wheel drives. In Proceedings of the EPE Conference, Trondheim, Norway, 8–10 September 1997; pp. 659–664. [Google Scholar]
- Du, Z.; Tolbert, L.M.; Chiasson, J.N. Active harmonic elimination for multilevel converters. IEEE Trans. Power Electron. 2006, 21, 459–469. [Google Scholar]
- Tolbert, L.M.; Chiasson, J.N.; Du, Z.; McKenzie, K.J. Elimination of Harmonics in a Multilevel Converter with Non equal DC Sources. IEEE Trans. Ind. Appl. 2005, 41, 75–82. [Google Scholar] [CrossRef]
- Fong, Y.C.; Cheng, K.W.E. An adaptive modulation scheme for fundamental frequency switched multilevel inverter with unbalanced and varying voltage sources. In Proceedings of the Power Electronics Systems and Applications (PESA), Hong Kong, China, 15–17 December 2016; pp. 1–6. [Google Scholar]
- Edpuganti, A.; Rathore, A.K. Fundamental Switching Frequency Optimal Pulsewidth Modulation of Medium-Voltage Cascaded Seven-Level Inverter. IEEE Trans. Ind. Appl. 2015, 51, 3485–3492. [Google Scholar] [CrossRef]
- Corzine, K.A.; Sudhoff, S.D.; Whitcomb, C.A. Performance characteristics of a cascaded two-level converter. IEEE Trans. Energy Convers. 1999, 14, 433–439. [Google Scholar] [CrossRef]
- Li, L.; Czarkowski, D.; Liu, Y.; Pillay, P. Multi-level selective harmonic elimination PWM technique in serie-connected voltage inverters. IEEE Trans. Ind. Appl. 2000, 36, 160–170. [Google Scholar] [CrossRef]
- Napoles, J.; Leon, J.I.; Portillo, R.; Franquelo, L.G.; Aguirre, M.A. Selective Harmonic Mitigation Technique for High Power Converters. IEEE Trans. Ind. Electron. 2009, 57, 2197–2206. [Google Scholar] [CrossRef]
- Haitham, A.R.; Holtz, J.; Rodriguez, J.; Baoming, G. Medium Voltage Multilevel Converters-State of the Art, Challenges, and Requirements in Industrial Applications. IEEE Trans. Ind. Electron. 2010, 57, 2581–2596. [Google Scholar]
- Lai, J.-S.; Peng, F.Z. Multi-level converters-A new breed of power converters. IEEE Trans. Ind. Appl. 1996, 32, 509–517. [Google Scholar]
- Davari, P.; Yang, Y.; Zare, F.; Blaabjerg, F. A novel harmonic elimination approach in three-phase multi-motor drives. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 7001–7008. [Google Scholar]
- Sivakumar, K.; Das, A.; Ramchand, R.; Patel, C. A Hybrid Multilevel Inverter Topology for an Open-End Winding Induction Motor Drive Using Two-Level Inverters in Series with a Capacitor-Fed H-Bridge Cell. IEEE Trans. Ind. Electron. 2010, 57, 3707–3714. [Google Scholar] [CrossRef]
- Boller, T.; Holtz, J.; Rathore, A.K. Optimal pulse width modulation of a dual 3LI system operated from a single dc link. IEEE Trans. Ind. Appl. 2012, 48, 1610–1615. [Google Scholar] [CrossRef]
- Mondal, G.; Sivakumar, K.; Ramchand, R.; Gopakumar, K.; Levi, E. A Dual Seven-Level Inverter Supply for an Open-End Winding Induction Motor Drive. IEEE Trans. Ind. Electron. 2008, 56, 1665–1673. [Google Scholar] [CrossRef]
- Somasekhar, T.; Gopakumar, K.; Bajiu, M.R.; Mohapatra, K.K.; Umanand, L. A multilevel inverter system for an inductor motor with open-end windings. IEEE Trans. Ind. Electron. 2005, 52, 824–836. [Google Scholar] [CrossRef]
- Edpuganti, A.; Rathore, A.K. New Optimal Pulse Width Modulation for Single DC-Link Dual-Inverter Fed Open-End Stator Winding Induction Motor Drive. IEEE Trans. Power Electron. 2014, 30, 4386–4393. [Google Scholar]
- Foti, S.; Testa, A.; Scelba, G.; de Caro, S.; Cacciato, M.; Scarcella, G.; Bazzano, D.; Scimone, T. A new approach to improve the current harmonic content on open-end winding AC motors supplied by multi-level inverters. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 4040–4047. [Google Scholar]
- Foti, S.; Testa, A.; Scelba, G.; de Caro, S.; Cacciato, M.; Scarcella, G.; Scimone, T. An Open End Winding Motor Approach to mitigate the phase voltage distortion on Multi-Level Inverters. IEEE Trans. Power Electron. 2018, 33, 2404–2416. [Google Scholar] [CrossRef]
- De Caro, S.; Foti, S.; Scimone, T.; Testa, A.; Cacciato, M.; Scarcella, G.; Scelba, G. THD and efficiency improvement in multi-level inverters through an open end winding configuration. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–7. [Google Scholar]
- Foti, S.; Scelba, G.; Testa, A.; Sciacca, A. An Averaged-Value Model of an Asymmetrical Hybrid Multi-Level Rectifier. Energies 2019, 12, 589. [Google Scholar] [CrossRef]
- Foti, S.; de Caro, S.; Scelba, G.; Scimone, T.; Testa, A.; Cacciato, M.; Scarcella, G. An Optimal Current Control Strategy for Asymmetrical Hybrid Multilevel Inverters. IEEE Trans. Ind. Appl. 2018, 54, 4425–4436. [Google Scholar] [CrossRef]
- De Caro, S.; Foti, S.; Scimone, T.; Testa, A.; Cacciato, M.; Pulvirenti, M.; Russo, S. Over-voltage mitigation on SiC based motor drives through an open end winding configuration. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 4332–4337. [Google Scholar]
- Foti, S.; Testa, A.; Scelba, G.; Cacciato, M.; de Caro, G.S.S.; Scimone, T. Overvoltage mitigation in open-end winding AC motor drives. In Proceedings of the 2015 IEEE ICRERA, Palermo, Italy, 22–25 November 2015; pp. 235–238. [Google Scholar]
- Scelba, G.; Scarcella, G.; Foti, S.; Testa, A.; de Caro, S.; Scimone, T. An Open-end Winding approach to the design of multi-level multi-motor drives. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 5026–5032. [Google Scholar]
- Haque, R.U.; Toulabi, M.S.; Knight, A.M.; Salmon, J. Wide speed range operation of PMSM using an open winding and a dual inverter drive with a floating bridge. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Denver, CO, USA, 15–19 September 2013; pp. 3784–3791. [Google Scholar]
- Cacciato, M.; Consoli, A.; Finocchiaro, L.; Testa, A. High frequency modeling of bearing currents and shaft voltage on electrical motors. In Proceedings of the Eighth International Conference on Electrical Machines and Systems, Nanjing, China, 27–29 September 2005; pp. 2065–2070. [Google Scholar]
- Cacciato, M.; Cavallaro, C.; Scarcella, G.; Testa, A. Effects of connection cable length on conducted EMI in electric drives. In Proceedings of the IEEE International Electric Machines and Drives Conference, Seattle, WA, USA, 9–12 May 1999; pp. 428–430. [Google Scholar]
- Cacciato, M.; De Caro, S.; Scarcella, G.; Scelba, G.; Testa, A. Improved space-vector modulation technique for common mode currents reduction. IET Power Electron. 2013, 6, 1248–1256. [Google Scholar] [CrossRef]
- Foti, S.; Testa, A.; Scelba, G.; Sabatini, V.; Lidozzi, A.; Solero, L. Asymmetrical hybrid unidirectional T-type rectifier for high-speed gen-set applications. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 4887–4893. [Google Scholar]
- Scelba, G.; Scarcella, G.; Foti, S.; De Caro, S.; Testa, A. Self-sensing control of open-end winding PMSMs fed by an asymmetrical hybrid multilevel inverter. In Proceedings of the IEEE International Symposium on Sensorless Control for Electrical Drives (SLED), Catania, Italy, 18–19 September 2017; pp. 165–172. [Google Scholar]
- De Caro, S.; Foti, S.; Scelba, G.; Scimone, T.; Testa, A. A six-level asymmetrical Hybrid Photovoltaic Inverter with inner MPPT capability. In Proceedings of the 6th International Conference on Clean Electrical Power (ICCEP), Santa Margherita Ligure, Italy, 27–29 June 2017; pp. 631–635. [Google Scholar]
- Dujic, D.; Jones, M.; Vukosavic, S.N.; Levi, E. A general PWM method for a (2n+1)-leg inverter supplying n three-phase machines. IEEE Trans. Ind. Electron. 2009, 56, 4107–4118. [Google Scholar] [CrossRef]
- Rifkin, S. Adjustable-Voltage Hoist Drives for Cranes. IEEE Electr. Eng. 1956, 75, 620–623. [Google Scholar] [CrossRef]
- Myles, A.H.; Davies, M.C.; Srnka, L.J. DC magnetic crane hoist control for AC powered cranes. Trans. Am. Inst. Electr. Eng. Part I Commun. Electron. 1960, 79, 207–211. [Google Scholar]
- Ruxi, W.; Yue, W.; Qiang, D.; Yanhui, H.; Zhaoan, W. Study of control methodology for single inverter parallel connected dual induction motors based on the dynamic model. In Proceedings of the 2006 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2017; pp. 1–7. [Google Scholar]
- Matsuse, K.; Kouno, Y.; Kawai, H.; Yokomizo, S. A speed-sensorless vector control method of parallel-connected dual induction motor fed by a single inverter. IEEE Trans. Ind. Appl. 2002, 38, 1566–1571. [Google Scholar] [CrossRef]
- Kelecy, P.M.; Lorenz, R.D. Control methodology for single inverter, parallel connected dual induction motor drives for electric vehicles. In Proceedings of the Power Electronics Specialists Conference, PESC ’94 Record, 25th Annual IEEE, Taipei, Taiwan, 20–25 June 1994; Volume 2, pp. 987–991. [Google Scholar]
- Dixit, A.; Mishra, N.; Sinha, S.K.; Singh, P. A review on different PWM techniques for five leg voltage source inverter. In Proceedings of the IEEE-International Conference On Advances In Engineering, Science And Management (ICAESM), Nagapattinam, Tamil Nadu, India, 30–31 March 2012; pp. 421–428. [Google Scholar]
- Tabbache, A.; Rebaa, K.; Marouani, K.; Benbouzid, M.E.H.; Kheloui, A. Independent control of two induction motors fed by a five legs PWM inverter for electric vehicles. In Proceedings of the 2013 4th International Conference on Power Engineering, Energy and Electrical Drives, Istanbul, Turkey, 13–17 May 2013; pp. 629–634. [Google Scholar]
- Pradabane, S. A New SVPWM for Dual-Inverter fed Three-level Induction Motor Drive. In Proceedings of the 2013 4th International Conference on Green Computing, Communication and Conservation of Energy, Chennai, India, 12–14 December 2014; pp. 514–518. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vector | Magnitude | Switching State |
|---|---|---|
| Zero vector | 0 | PPP, OOO, NNN |
| Small vector | 1/3 VDC′ | POO, PPO, OPO, OPP, POP, OOPONN, OON, NON, NOO, ONO, NNO |
| Medium vector | /3 VDC′ | PON, OPN, NPO, NOP, ONP, PNO |
| Large vector | 2/3 VDC′ | PNN, PPN, NPN, NPP, NNP, PNP |
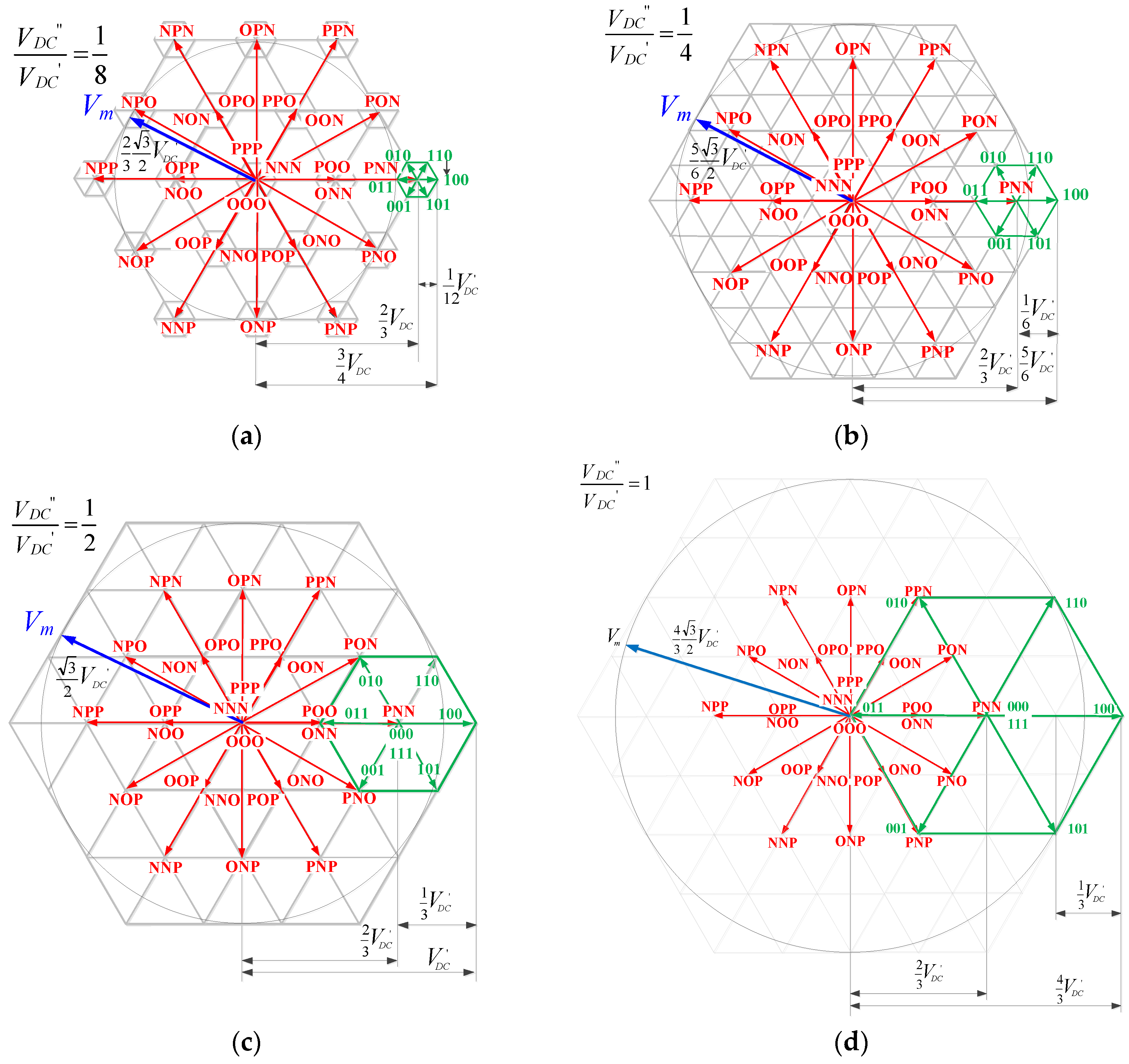
| KV | Number of Inverter States | Number of Voltage Vectors | Number of Voltage Levels |
|---|---|---|---|
| 1/8 | 216 | 152 | 8 |
| 1/4 | 216 | 91 | 6 |
| 1/2 | 216 | 37 | 4 |
| 1 | 216 | 61 | 5 |
| KV | Vmpk | THDV (%)\KP ωr/ωn = 0.1 | THDV (%)\KP ωr/ωn = 0.3 | THDV (%)\KP ωr/ωn = 0.7 | THDV (%)\KP ωr/ωn = 1 |
|---|---|---|---|---|---|
| 1/8 | 0.58 VDC′ | 51\1.14 | 45\1.29 | 30\1.93 | 19\3 |
| 1/4 | 0.72 VDC′ | 36\2 | 29\2.48 | 15\4.8 | 4.0\20.5 |
| 1/2 | 0.87 VDC′ | 10\8.7 | 8\10.88 | 7.1\12.2 | 3.5\21.7 |
| 1 | 1.15 VDC′ | 46\2.5 | 40\2.88 | 31\3.7 | 22.6\5.1 |
| Pn (HP) | Vn (V) | pp | Ls (mH) | Lr (H) | Lm (H) | Rs (Ω) | Rfe (Ω) | Rr (Ω) | J (Kg·m2) |
|---|---|---|---|---|---|---|---|---|---|
| 3 | 400 | 2 | 0.32 | 0.32 | 0.31 | 2.6 | 902 | 2.7 | 0.016 |
| VCES (V) | IC (A) | Tj (°C) | Vceo (V) | ton (ns) | toff (ns) |
|---|---|---|---|---|---|
| 600 | 20 | 150 | 0.75 | 60 | 131 |
| VDSS (V) | IDSS (A) | Tj (°C) | RDS(on) (mΩ) | ton (ns) | toff (ns) |
|---|---|---|---|---|---|
| 150 | 20 | 175 | 32 | 8.9 | 17.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Foti, S.; Testa, A.; De Caro, S.; Scimone, T.; Scelba, G.; Scarcella, G. Multi-Level Open End Windings Multi-Motor Drives. Energies 2019, 12, 861. https://doi.org/10.3390/en12050861
Foti S, Testa A, De Caro S, Scimone T, Scelba G, Scarcella G. Multi-Level Open End Windings Multi-Motor Drives. Energies. 2019; 12(5):861. https://doi.org/10.3390/en12050861
Chicago/Turabian StyleFoti, Salvatore, Antonio Testa, Salvatore De Caro, Tommaso Scimone, Giacomo Scelba, and Giuseppe Scarcella. 2019. "Multi-Level Open End Windings Multi-Motor Drives" Energies 12, no. 5: 861. https://doi.org/10.3390/en12050861
APA StyleFoti, S., Testa, A., De Caro, S., Scimone, T., Scelba, G., & Scarcella, G. (2019). Multi-Level Open End Windings Multi-Motor Drives. Energies, 12(5), 861. https://doi.org/10.3390/en12050861