Analysis of the Design of a Poppet Valve by Transitory Simulation



Abstract
:1. Introduction
2. Problem Definition
2.1. Computational Domain
2.2. Governing Equations
2.2.1. Conservation Equations
2.2.2. RANS Models
2.2.3. Wall Effect Functions
2.3. Numerical Methods
2.3.1. CFD Methods
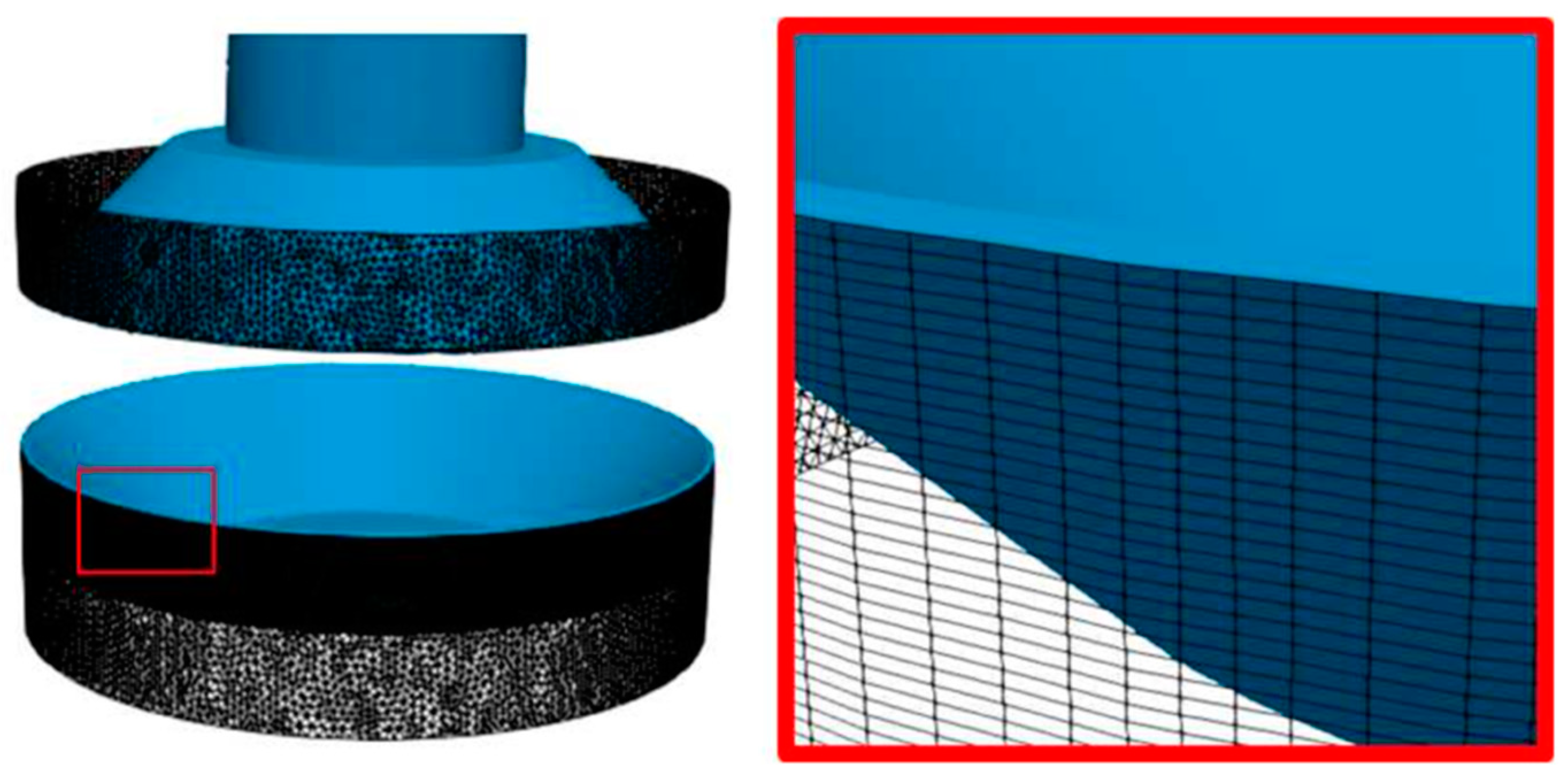
2.3.2. Mesh Independence
2.3.3. Turbulence Models
3. Results and Discussion
3.1. Results Validation using Manufacturer’s Published Data
3.2. Dynamic Analysis
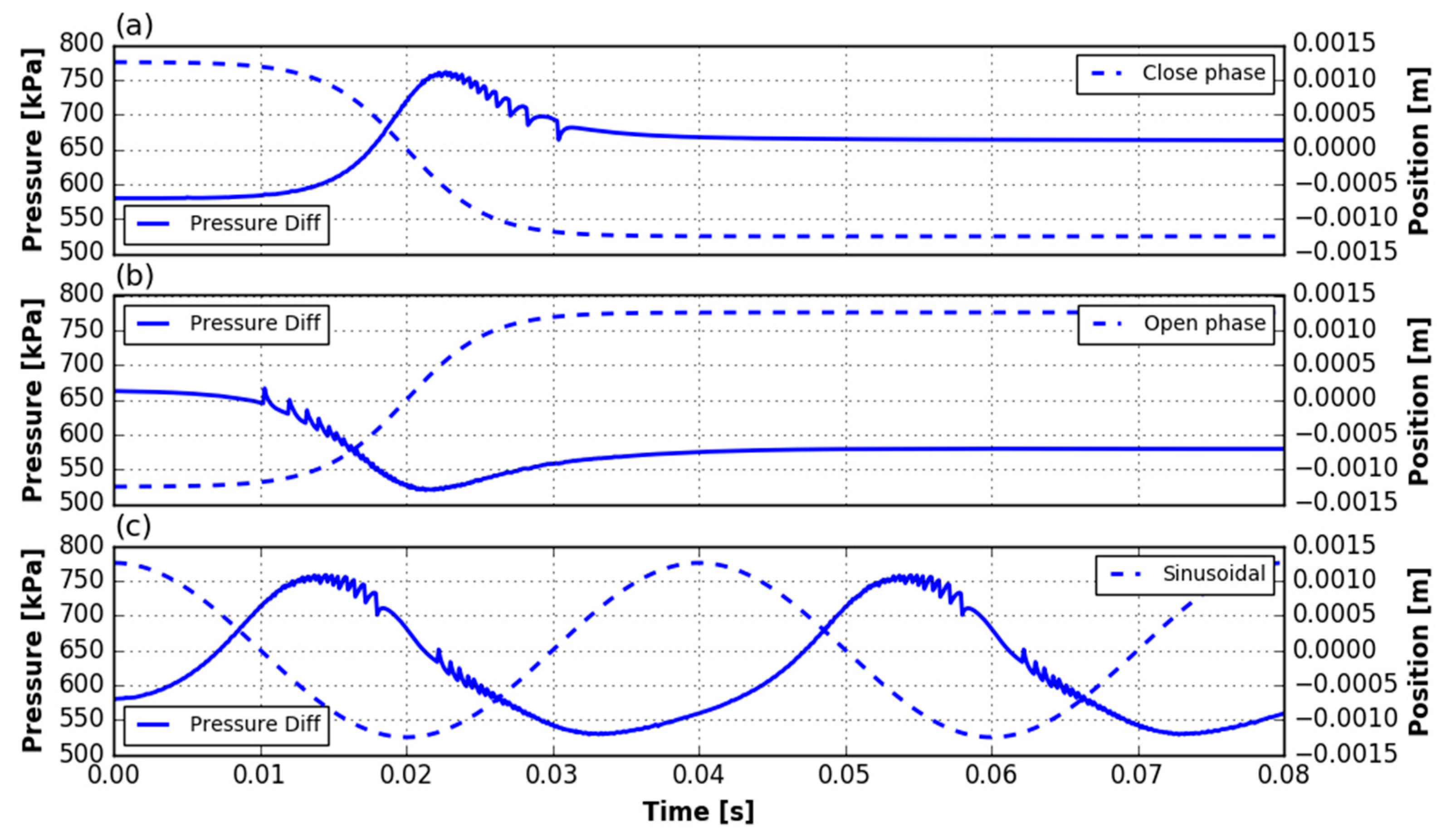
3.2.1. Results at a Frequency of 25 Hz
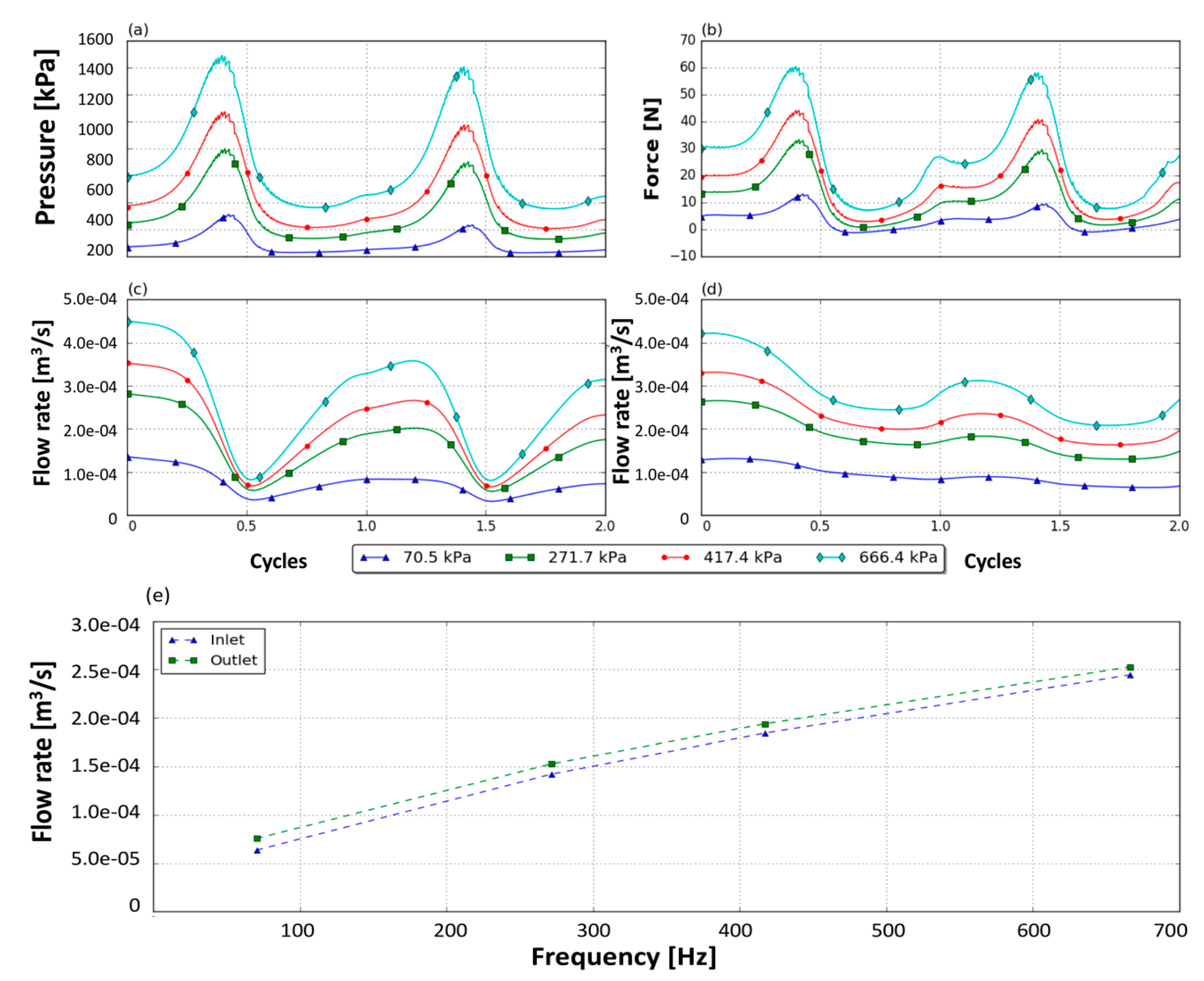
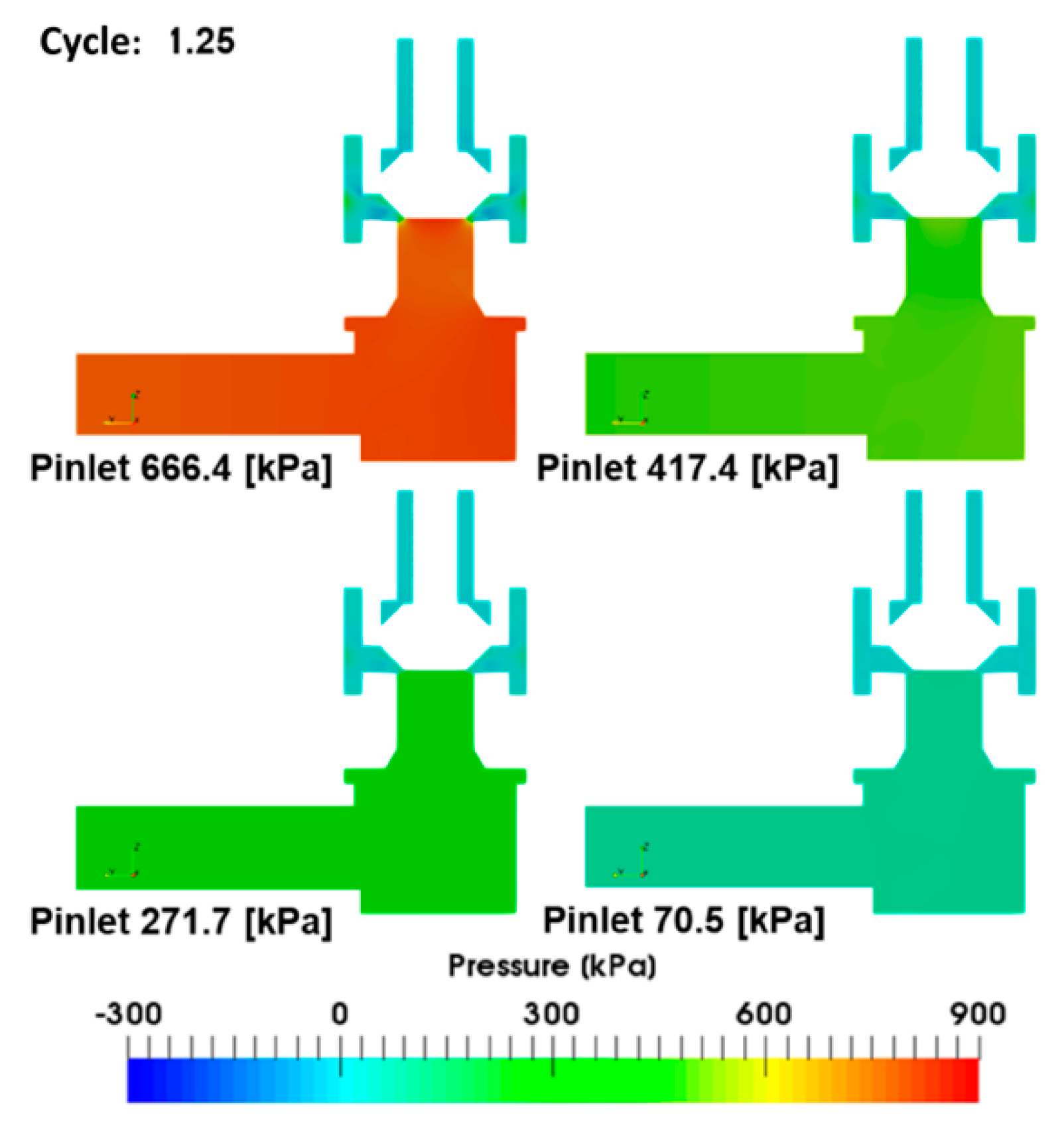
3.2.2. Parametric Analysis
3.2.3. Non-dimensional Analysis
3.2.4. Evaluation of Variation of the Poppet Angle
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| A | Total movement amplitude of the poppet |
| C | Empirical constant for the wall boundary |
| De | Valve delay |
| dp | Pressure drop across de valve |
| E | Empirical constant for wall boundary |
| f | Valve oscillation frequency |
| I | Turbulence intensity |
| K | von Karman constant |
| Kh | Velocity factor for the change of head-viside function |
| P(t) | Valve position function |
| Total pressure, average and fluctuating | |
| Q | Port 1 flow rate |
| t | Time |
| Total velocity, average and fluctuating | |
| U+ | Non-dimensional velocity |
| Y+ | Non-dimensional distance to the wall |
| κ | Turbulence energy |
| μ | Dynamic viscosity |
| μt | Turbulence viscosity |
| πdp | Loss number |
| πf | Frequency number |
| πQ | Flow number |
| ρ | Fluid’s density |
| Total Stress tensor, average, fluctuating |
References
- Eaton, Industrial Hydraulics Manual: Your Comprehensive Guide to Industrial Hydraulics; Eaton Hydraulics: Minneapolis, MN, USA, 2008; p. 642.
- Byington, C.; Watson, M. A model-based approach to prognostics and health management for flight control actuators. Aerosp. Conf. Proc. 2004, 6, 3551–3562. [Google Scholar]
- Smith, M.; Byington, C.; Watson, M.; Bharadwaj, S.; Swerdon, G.; Goebel, K.; Balaban, E. Experimental and analytical development of health management for Electro-Mechanical Actuators. In Proceedings of the IEEE Aerospace conference, Big Sky, MT, USA, 7–14 March 2009. [Google Scholar]
- De Oliveira Bizarria, C.; Yoneyama, T. Prognostics and Health Monitoring for an electro-hydraulic flight control actuator. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2009. [Google Scholar]
- Mintsa, H.; Member, J.; Venugopal, R. Adaptive Control of an Electrohydraulic Position Servo System. In Proceedings of the IEEE AFRICON, Nairobi, Kenya, 23–25 September 2009. [Google Scholar]
- Paloniitty, M.; Linjama, M. High-Linear Digital Hydraulic Valve Control by an Equal Coded Valve System and Novel Switching Schemes. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 3, 258–269. [Google Scholar] [CrossRef]
- Porciúncula, G.; De Negri, V.; Dias, A. Reliability of Electro-Hydraulic Equipment: Systematization and Analysis. Proc. COBEM Int. Congress Mech. Eng. 2005, 2, 393–400. [Google Scholar]
- Villalobos, O.; Burvill, C.; Stecki, J. Fault Diagnosis of Electrohydraulic Systems. Proc. Jfps Int. Symp. Fluid Power 2005, 6, 658–663. [Google Scholar] [CrossRef]
- Long, G. Comparison Study of Position Control with 2-Way and 3-Way High Speed on/off Electrohydraulic Valves. Master’s Thesis, Purdue University, West Lafayette, IN, USA, 2009. [Google Scholar]
- Williamson, C.; Ivantysynova, M. Pump Mode Prediction For Four-Quadrant Velocity Control Of Valveless Hydraulic Actuators. In Proceedings of the 7th JFPS International Symposium on Fluid Power, Toyama, Japan, 11–15 September 2008. [Google Scholar]
- Ivantysynova, M. Innovations in Pump Design-What Are Future Directions? In Proceedings of the JFPS International Symposium on Fluid Power, Toyama, Japan, 11–15 September 2008; pp. 59–64. [Google Scholar]
- Eggers, B.; Rahmfeld, R.; Ivantysynova, M. An Energetic Comparison Between Valveless and Valve Controlled Active Vibration Damping for Off-Road Vehicles. Proc. Jfps Int. Symp. Fluid Power 2005, 6, 275–283. [Google Scholar] [CrossRef]
- Andruch, J.; Lumkes, J. A hydraulic system topography with integrated energy recovery and reconfigurable flow paths using high speed valves. In Proceedings of the 51st National Conference on Fluid Power (NCFP), Las Vegas, NV, USA, 12–14 March 2008; pp. 649–657. [Google Scholar]
- Opdenbosch, P.; Sadegh, N.; Book, W.; Enes, A. Auto-calibration based control for independent metering of hydraulic actuators. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 153–158. [Google Scholar]
- Guglielmino, E.; Semini, C.; Kogler, H.; Scheidl, R.; Caldwell, D. Power Hydraulics—Switched Mode Control of Hydraulic Actuation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3031–3036. [Google Scholar]
- Linjama, M.; Vilenius, M. Digital hydraulics—Towards perfect valve technology. In Proceedings of the Tenth Scandinavian International Conference on Fluid Power, Tampere, Finland, 21–23 May 2007; pp. 2–16. [Google Scholar]
- Tu, H.; Rannow, M.; Van De Ven, J.; Wang, M.; Li, P.; Chase, T. High Speed Rotary Pulse Width Modulated On/Off Valve. In ASME 2007 International Mechanical Engineering Congress and Exposition; American Society of Mechanical Engineers: Seattle, WA, USA, 11–15 November 2007; pp. 1–14. [Google Scholar]
- Schepers, I.; Schmitz, D.; Weiler, D.; Cochoy, O.; Neumann, U. A novel model for optimizing development and application of switching valves in closed loop control. Int. J. Fluid Power 2011, 12, 31–40. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, F.; Yang, Q.; Chen, J.; Guan, H. Experimental analysis of new high-speed pow-erful digital solenoid valves. Energy Convers. Manag. 2011, 52, 2309–2313. [Google Scholar]
- Pindera, M.; Sun, Y.; Malosse, J.; Garcia, J. Co-Simulation Based Design and Experimental Validation of Control Strategies for Digital Fluid Power Systems. In Proceedings of the ASME/BATH Symposium on Fluid Power and Motion Control, Sarasota, FL, USA, 6–9 October 2013; p. V001T01A053. [Google Scholar]
- Paloniitty, M.; Linjama, M.; Huhtala, K. Equal coded digital hydraulic valve system—Improving tracking control with pulse frequency modulation. Procedia Eng. 2015, 106, 83–91. [Google Scholar] [CrossRef]
- Van Varseveld, R.; Bone, G. Accurate position control of a pneumatic actuator using on/off solenoid valves. IEEE/ASME Trans. Mechatron. 1997, 2, 195–204. [Google Scholar] [CrossRef]
- Xu, B.; Ding, R.; Zhang, J.; Su, Q. Modeling and dynamic characteristics analysis on a three- stage fast-response and large-flow directional valve. Energy Convers. Manag. 2014, 79, 187–199. [Google Scholar] [CrossRef]
- Jackson, R.; Belger, M.; Cassaidy, K.; Kokemoor, A. CFD simulation and experimental investigation of steady state flow force reduction in a hydraulic spool valve with machined back angles. In Proceedings of the ASME/BATH Symposium on Fluid Power and Motion Control, Sarasota, FL, USA, 16–19 October 2017. [Google Scholar]
- Tian, H.; Van de Ven, J. Geometric optimization of a hydraulic motor rotary valve. In Proceedings of the ASME/BATH Symposium on Fluid Power and Motion Control, Sarasota, FL, USA, 6–9 October 2013. [Google Scholar]
- Finesso, R.; Rundo, M. Numerical and experimental investigation on a conical poppet relief valve with flow force compensation. Int. J. Fluid Power 2017, 18, 111–122. [Google Scholar] [CrossRef]
- Han, M.; Liu, Y.; Wu, D.; Zhao, X.; Tan, H. A numerical investigation in characteristics of flow force under cavitation state inside the water hydraulic poppet valves. Int. J. Heat Mass Transfer 2017, 111, 1–16. [Google Scholar] [CrossRef]
- Duan, Y.; Jackson, C.; Eaton, M.; Bluck, M. An assessment of eddy viscosity models on predicting performance parameters of valves. Nucl. Eng. Des. 2019, 342, 60–77. [Google Scholar] [CrossRef]
- Lisowski, E.; Rajda, J. CFD analysis of pressure loss during flow by hydraulic directional control valve constructed from logic valves. Energy Convers. Manag. 2013, 65, 285–291. [Google Scholar] [CrossRef]
- Lisowski, E.; Czyzycki, W.; Rajda, J. Three dimensional CFD analysis and experimental test of flow force acting on the spool of solenoid operated directional control valve. Energy Convers. Manag. 2013, 70, 220–229. [Google Scholar] [CrossRef]
- ISO 4411:2008(E), Hydraulic Fluid Power—Valves—Determination of Pressure Differential/Flow Characteristics Standard; International Organization for Standardization: Geneva, Switzerland, 2008.
- Sun Hydraulics. Performance Data, Accumulator Sense, Pump Unload Valves | Sun Hydraulics. 2019. Available online: www.sunhydraulics.com/tech-resources/performance-data (accessed on 23 February 2019).
- Duan, Y.; Revell, A.; Sinha, J.; Hahn, W. A study of unsteady force on the stem in a valve with different openings. In Proceedings of the 1st International Conference Maintenance Engineering, Manchester, UK, 30 August 2016; pp. 1–11. [Google Scholar]
- Duan, Y.; Revell, A.; Sinha, J.; Hahn, W. Flow induced excitations in the high pressure steam turbine governor valve at different openings. In Proceedings of the 2nd International Conference Maintenance Engineering, Manchester, UK, 5–6 September 2017; pp. 1–13. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Temperature (°C) | Density (kg/m3) | Dynamic Viscosity (kg·m/s) |
|---|---|---|---|
| Oil AW 32 | 49 | 847.8 | 0.0195 |
| Elements | Published Pressure (kPa) | Simulated Pressure (kPa) | Percent Error |
|---|---|---|---|
| 3,970,308 | 540 | 603 | 11.70% |
| 5,512,452 | 540 | 588 | 8.98% |
| 8,239,820 | 540 | 576 | 6.72% |
| 9,864,461 | 540 | 576 | 6.96% |
| 12,308,409 | 540 | 574 | 6.45% |
| Turbulence Model | Published Pressure (kPa) | Simulated Pressure (kPa) | Percent Error |
|---|---|---|---|
| Standard κ-ε | 540 | 577 | 6.96% |
| Standard κ-ε SWF | 540 | 531 | 1.50% |
| Standard κ-ε EWT | 540 | 543 | 0.61% |
| Realizable κ-ε SWT | 540 | 484 | 10.34% |
| Realizable κ-ε EWT | 540 | 550 | 1.94% |
| κ-ω SST | 540 | 607 | 12.6% |
| Spalart-Allmaras | 540 | 577 | 3.45% |
| Flow Rate (m3/s) | Published Pressure (kPa) | Simulated Pressure (kPa) | Percent Error |
|---|---|---|---|
| 4.44 × 10−4 | 540 | 559 | 3.59% |
| 3.76 × 10−4 | 389 | 404 | 3.96% |
| 3.01 × 10−4 | 252 | 262 | 4.08% |
| 2.24 × 10−4 | 144 | 148 | 3.07% |
| 1.47 × 10−4 | 64 | 67 | 5.42% |
| 6.75 × 10−5 | 14 | 16 | 14.83% |
| Parameter | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Frequency (Hz) | 25 | 50 | 100 | 200 |
| Inlet Pressure (kPa) | 70.5 | 271.7 | 417.3 | 666.4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gomez, I.; Gonzalez-Mancera, A.; Newell, B.; Garcia-Bravo, J. Analysis of the Design of a Poppet Valve by Transitory Simulation. Energies 2019, 12, 889. https://doi.org/10.3390/en12050889
Gomez I, Gonzalez-Mancera A, Newell B, Garcia-Bravo J. Analysis of the Design of a Poppet Valve by Transitory Simulation. Energies. 2019; 12(5):889. https://doi.org/10.3390/en12050889
Chicago/Turabian StyleGomez, Ivan, Andrés Gonzalez-Mancera, Brittany Newell, and Jose Garcia-Bravo. 2019. "Analysis of the Design of a Poppet Valve by Transitory Simulation" Energies 12, no. 5: 889. https://doi.org/10.3390/en12050889
APA StyleGomez, I., Gonzalez-Mancera, A., Newell, B., & Garcia-Bravo, J. (2019). Analysis of the Design of a Poppet Valve by Transitory Simulation. Energies, 12(5), 889. https://doi.org/10.3390/en12050889