Aggregating Large-Scale Generalized Energy Storages to Participate in the Energy and Regulation Market

Abstract
:1. Introduction
- (1)
- A general state variable, referred to as the degree of satisfaction (DoS), is defined, and dynamic models with a unified form are developed for heterogenous GESs, including both GESs operating at a continuous power and GESs operating at a discrete power with discrete states.
- (2)
- A unified control framework, based on the market equilibrium mechanism, is presented to co-ordinate heterogenous GESs. General demand curves are constructed under the framework to achieve equal DoS across GESs, and meet diversified requirements and privacy concerns.
- (3)
- A low-dimensional aggregate dynamic model for large-scale GESs, which can be regarded as a macro GES, is derived. A scalable optimization model is then presented for an LA to participate in both the energy market and the regulation market.
2. Dynamic Models for Generalized Energy Storages (GESs)
2.1. Degree of Satisfaction, DoS
- (1)
- It could be used to measure the user satisfaction. The range of DoS is set to [,1], and the closer the DoS is to 0, the higher the user satisfaction is.
- (2)
- DoS could reflect a GES’s state of energy: DoS equalling 0 indicates that the stored energy is at the expected level, while DoS close to ±1 means the stored energy is near the allowed range.
- (3)
- Since a GES can deviate from its ideal state (DoS=0) to provide services, the DoS can be used to quantify its current flexility (i.e., a DoS value close to 0 implies a high flexibility reservation).
- (4)
- As DoS is a generalized index, it can be used to establish a unified model for various GESs.
2.2. Derivation of Dynamic Models
2.2.1. Electric Energy Storage (EES)
2.2.2. Electric Vehicle (EV)
2.2.3. Inverter Air-Conditioner (IVA)
2.2.4. Fixed-Frequency Air-Conditioner (FFA)
2.3. Unified Dynamic Model
3. Real-Time Coordination Method of Large-Scale GESs
3.1. DoS-Equality Control Based on Market Equilibrium Mechanism
- (1)
- Bidding: Each GES expresses its urgency and flexibility by constructing a demand curve. The demand curve is denoted by in this paper, which is a non-increasing function.
- (2)
- Aggregating and clearing: LA collects demand curves from all GESs and forms the aggregate demand curve , where N is the number of controlled GESs. Assume the aggregate target power is , then LA can calculate the clearing price by .
- (3)
- Disaggregating: LA broadcasts to all GESs. Each GES responds to locally, according to its demand curve. The response power of GES i can be obtained by .
- (1)
- It improves the autonomy of the GES. Each GES can convert its private information (e.g., user preferences, current adjustable range, and security constraints) into a demand curve. Since the demand curves of all GESs have a unified form, it can shield the differences among various GESs and effectively protect user privacy. Besides, the LA does not have permission to directly control the GES, which improves device security.
- (2)
- It simplifies the control of the LA. The LA does not need to specify the type of each GES, and is able to coordinates various GESs through an identical signal (i.e., the virtual price signal ), which significantly reduces control complexity and the requirement of communication bandwidth.
- (1)
- GESs could have the same degree of user satisfaction, regardless of the resource type or capacity, which ensures control fairness. In addition, since the DoS reflects a GES’s state of energy, the DoS-equality control could avoid some GESs going beyond their adjustable range prematurely, thus better utilizing the regulation ability of a GES cluster.
- (2)
- The unique DoS of a GES cluster can be a state variable to derive an aggregate dynamic model, making it possible to treat the whole GES cluster as a virtual storage (i.e., a macro GES), which will be detailed in Section 4.
3.2. Demand Curve of a CP-GES
3.2.1. Demand Curve
3.2.2. Characteristic Power
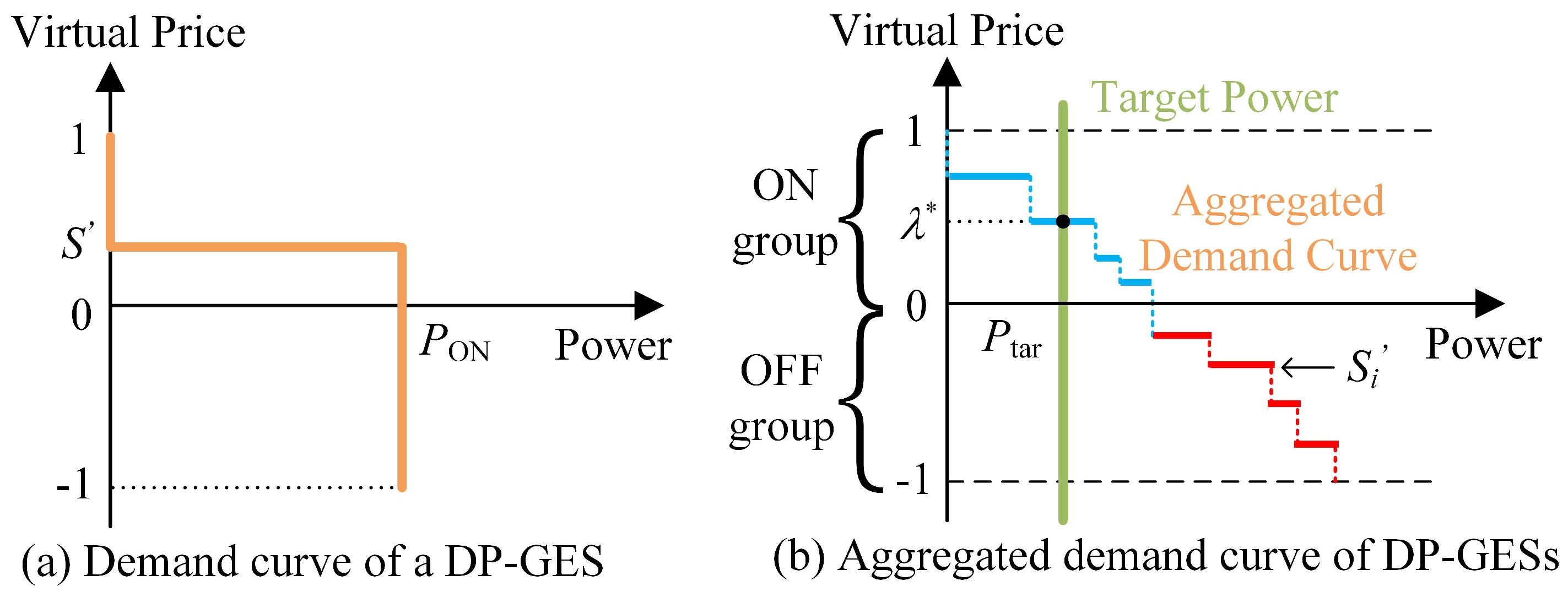
3.3. Demand curve of a DP-GES
3.3.1. Demand Curve
- (1)
- For DP-GESs in the same group, the values of for a given DP-GES reflects its power consumption priority. The higher the value of is, the higher the probability to maintain or switch to the ON state is, and vice versa.
- (2)
- A DP-GES in the ON group always has a higher than that in the OFF group, which gives a high priority for DP-GESs to maintain their current states; thus avoiding frequent switching.
3.3.2. Characteristic Power
3.4. Locked State
4. Aggregate Dynamic Model for Macro GES
5. Application
5.1. Optimal Multi-Market Flexibility Allocation
5.2. Three-Layer Control Structure
6. Simulation Studies
6.1. Simulation Settings
6.2. Case 1: Only Participate in the Energy Market
6.3. Case 2: Participate in Both Energy and Regulation Markets
6.4. Response Performance of Individual GESs
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| GES | Generalized Energy Storage |
| EES | Electric Energy Storage |
| EV | Electric Vehicle |
| FFA | Fixed-Frequency Air-conditioner |
| IVA | Inverter Air-conditioner |
| TCL | Thermostatically Controlled Load |
| DoS | Degree of Satisfaction |
| LA | Load Aggregator |
Appendix A. Derivation of the Function
Appendix B. Supplementary Figures



References
- Magdy, G.; Mohamed, E.A.; Shabib, G.; Elbaset, A.A.; Mitani, Y. Microgrid dynamic security considering high penetration of renewable energy. Prot. Control Mod. Power Syst. 2018, 3, 23. [Google Scholar] [CrossRef]
- Hao, H.; Wu, D.; Lian, J.; Yang, T. Optimal Coordination of Building Loads and Energy Storage for Power Grid and End User Services. IEEE Trans. Smart Grid 2018, 9, 4335–4345. [Google Scholar] [CrossRef]
- Mingshen, W.; Yunfei, M.; Jiang, T.; Hongjie, J.; Xue, L.; Kai, H.; Tong, W. Load curve smoothing strategy based on unified state model of different demand side resources. J. Mod. Power Syst. Clean Energy 2018, 6, 540–554. [Google Scholar]
- Vandael, S.; Claessens, B.; Hommelberg, M.; Holvoet, T.; Deconinck, G. A Scalable Three-Step Approach for Demand Side Management of Plug-in Hybrid Vehicles. IEEE Trans. Smart Grid 2013, 4, 720–728. [Google Scholar] [CrossRef]
- Hao, H.; Sanandaji, B.M.; Poolla, K.; Vincent, T.L. Aggregate Flexibility of Thermostatically Controlled Loads. IEEE Trans. Power Syst. 2014, 30, 189–198. [Google Scholar] [CrossRef]
- Song, M.; Gao, C.; Yan, H.; Yang, J. Thermal Battery Modeling of Inverter Air Conditioning for demand response. IEEE Trans. Smart Grid 2018, 9, 5522–5534. [Google Scholar] [CrossRef]
- Hughes, J.T.; Domínguez-García, A.D.; Poolla, K. Identification of virtual battery models for flexible loads. IEEE Trans. Power Syst. 2016, 31, 4660–4669. [Google Scholar] [CrossRef]
- Hao, H.; Sanandaji, B.; Poolla, K.; Vincent, T. A Generalized Battery Model of a Collection of Thermostatically Controlled Loads for Providing Ancillary Service. Commun. Control Comput. 2013. [Google Scholar] [CrossRef]
- Ke, M.; Zhao, Y.D.; Zhao, X.; Yu, Z.; Hill, D.J. Coordinated Dispatch of Virtual Energy Storage Systems in Smart Distribution Networks for Loading Management. IEEE Trans. Syst. Man Cybern. Syst. 2017. [Google Scholar] [CrossRef]
- Ma, K.; Yuan, C.; Yang, J.; Liu, Z.; Guan, X. Switched control strategies of aggregated commercial HVAC systems for demand response in smart grids. Energies 2017, 10, 953. [Google Scholar] [CrossRef]
- Khan, S.; Shahzad, M.; Habib, U.; Gawlik, W.; Palensky, P. Stochastic battery model for aggregation of thermostatically controlled loads. arXiv, 2016; arXiv:1601.07783. [Google Scholar]
- Mathieu, J.L.; Kamgarpour, M.; Lygeros, J.; Andersson, G.; Callaway, D.S. Arbitraging Intraday Wholesale Energy Market Prices With Aggregations of Thermostatic Loads. IEEE Trans. Power Syst. 2015, 30, 763–772. [Google Scholar] [CrossRef]
- Sanandaji, B.M.; Vincent, T.L.; Poolla, K. Ramping rate flexibility of residential HVAC loads. IEEE Trans. Sustain. Energy 2016, 7, 865–874. [Google Scholar] [CrossRef]
- Raman, N.S.; Barooah, P. On the round-trip efficiency of an HVAC-based virtual battery. arXiv, 2018; arXiv:1803.02883. [Google Scholar]
- Hu, J.; Yang, G.; Ziras, C.; Kok, K. Aggregator Operation in the Balancing Market Through Network-Constrained Transactive Energy. IEEE Trans. Power Syst. 2018. [Google Scholar] [CrossRef]
- Alizadeh, M.; Scaglione, A.; Applebaum, A.; Kesidis, G.; Levitt, K. Reduced-order load models for large populations of flexible appliances. IEEE Trans. Power Syst. 2015, 30, 1758–1774. [Google Scholar] [CrossRef]
- Xu, Z.; Callaway, D.S.; Hu, Z.; Song, Y. Hierarchical coordination of heterogeneous flexible loads. IEEE Trans. Power Syst. 2016, 31, 4206–4216. [Google Scholar] [CrossRef]
- Nazir, M.S.; Hiskens, I.A. A Dynamical Systems Approach to Modeling and Analysis of Transactive Energy Coordination. IEEE Trans. Power Syst. 2018. [Google Scholar] [CrossRef]
- Aho, J.; Pao, L.Y.; Fleming, P.; Ela, E. Controlling Wind Turbines for Secondary Frequency Regulation: An Analysis of AGC Capabilities Under New Performance Based Compensation Policy. In Proceedings of the 13th International Workshop on Large-Scale Integration of Wind Power Into Power Systems as Well as on Transmission Networks for Offshore Wind Power Plants, Berlin, Germany, 11–13 November 2014. [Google Scholar]
- Zhang, T.; Chen, S.X.; Gooi, H.B.; Maciejowski, J.M. A Hierarchical EMS for Aggregated BESSs in Energy and Performance-based Regulation Markets. IEEE Trans. Power Syst. 2017, 32, 1751–1760. [Google Scholar] [CrossRef]
- Wu, D.; Jin, C.; Balducci, P.; Kintner-Meyer, M. An energy storage assessment: Using optimal control strategies to capture multiple services. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015. [Google Scholar] [CrossRef]
- Cheng, B.; Powell, W.B. Co-optimizing battery storage for the frequency regulation and energy arbitrage using multi-scale dynamic programming. IEEE Trans. Smart Grid 2018, 9, 1997–2005. [Google Scholar] [CrossRef]
- Namor, E.; Sossan, F.; Cherkaoui, R.; Paolone, M. Control of Battery Storage Systems for the Simultaneous Provision of Multiple Services. IEEE Trans. Smart Grid 2018. [Google Scholar] [CrossRef]
- Dubey, A.; Chirapongsananurak, P.; Santoso, S. A Framework for Stacked-Benefit Analysis of Distribution-Level Energy Storage Deployment. Inventions 2017, 2, 6. [Google Scholar] [CrossRef]
- Anderson, K.; El Gamal, A. Co-optimizing the value of storage in energy and regulation service markets. Energy Syst. 2017, 8, 369–387. [Google Scholar] [CrossRef]
- Binetti, G.; Davoudi, A.; Naso, D.; Turchiano, B.; Lewis, F.L. Scalable Real-Time Electric Vehicles Charging With Discrete Charging Rates. IEEE Trans. Smart Grid 2015, 6, 2211–2220. [Google Scholar] [CrossRef]
- Floch, C.L.; Kara, E.; Moura, S. PDE Modeling and Control of Electric Vehicle Fleets for Ancillary Services: A Discrete Charging Case. IEEE Trans. Smart Grid 2018, 9, 573–581. [Google Scholar] [CrossRef]
- Wang, W.; Wang, D.; Jia, H.; He, G.; Hu, Q.; Sui, P.C.; Fan, M. Performance Evaluation of a Hydrogen-Based Clean Energy Hub with Electrolyzers as a Self-Regulating Demand Response Management Mechanism. Energies 2017, 10, 1211. [Google Scholar] [CrossRef]
- Yao, Y.; Zhang, P. Transactive control of air conditioning loads for mitigating microgrid tie-line power fluctuations. In Proceedings of the 2017 IEEE Power Energy Society General Meeting, Chicago, IL, USA, 16–20 July 2017. [Google Scholar] [CrossRef]
- Liu, M.; Shi, Y. Model Predictive Control for Thermostatically Controlled Appliances Providing Balancing Service. IEEE Trans. Control Syst. Technol. 2016, 24, 2082–2093. [Google Scholar] [CrossRef]
- Qi, Y.; Wang, D.; Wang, X.; Jia, H.; Pu, T.; Chen, N.; Liu, K. Frequency control ancillary service provided by efficient power plants integrated in Queuing-Controlled domestic water heaters. Energies 2017, 10, 559. [Google Scholar] [CrossRef]
- Xu, B.; Dvorkin, Y.; Kirschen, D.S.; Silva-Monroy, C.A.; Watson, J.P. A comparison of policies on the participation of storage in U.S. frequency regulation markets. In Proceedings of the 2016 IEEE Power & Energy Society General Meeting, Boston, MA, USA, 17–21 July 2016. [Google Scholar] [CrossRef]
- Zechun, H.U.; Xu, X.; Fang, Z.; Jing, Z.; Song, Y. Research on Automatic Generation Control Strategy Incorporating Energy Storage Resources. Proc. CSEE 2014, 34, 5080–5087. [Google Scholar]
- Yao, Y.; Zhang, P.; Wang, Y. A Two-layer Control Method for Thermostatically Controlled Loads to Provide Fast Frequency Regulation. Proc. CSEE 2018, 38, 4987–4998, 5296. [Google Scholar]
- PJM-RTO Regulation Data. 2017. Available online: https://www.pjm.com/markets-and-operations/ancillary-services.aspx (accessed on 3 July 2018).
- Chen, Y.; Xu, P.; Chu, Y.; Li, W.; Wu, Y.; Ni, L.; Bao, Y.; Wang, K. Short-term electrical load forecasting using the Support Vector Regression (SVR) model to calculate the demand response baseline for office buildings. Appl. Energy 2017, 195, 659–670. [Google Scholar] [CrossRef]
- Performance, Mileage and the Mileage Ratio. 2015. Available online: https://www.pjm.com/ /media/committees-groups/task-forces/rmistf/20151111/20151111-item-05-performance-based-regulation-concepts.ashx (accessed on 10 January 2019).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameter | Value | Type | Parameter | Value | |
|---|---|---|---|---|---|---|
| EES | Number | 10 | TCL | Thermal Parameter | (C/kW) | U(1,1.5) |
| (kWh) | U(40,50) | (kWh/C) | U(0.8,1.2) | |||
| (kW) | U(40,50) | Preference | (C) | U(23,28) | ||
| / | 0.9/0.9 | (C) | U(2,3) | |||
| (s) | 10 | FFA | Number | 100 | ||
| EV | Number | 20 | (kW) | U(4.5,5.5) | ||
| (kWh) | U(20,30) | COP | U(3,4) | |||
| (kW) | U(6,8) | (min) | 5 | |||
| 0.9 | IVA | Number | 100 | |||
| (h) | U(18,22) | (kW) | U(5,6) | |||
| (h) | U(6,9) | (kW) | U(0.4,0.5) | |||
| r% | 2.50% | /(kW/Hz) | 0.03/0.06 | |||
| U(0.75,0.85) | /(kW) | / | ||||
| (min) | 5 | (s) | 60 | |||
| Case | Baseline Case | Case 1 | Case 2 |
|---|---|---|---|
| Energy Bill/$ | 1062.7 | 923.8 | 982.5 |
| Change Rate /% | / | ||
| Regulation Payments/$ | 0 | 0 | 595.2 |
| Total Cost/$ | 1062.7 | 923.8 | 387.3 |
| Change Rate/% | / |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, Y.; Zhang, P.; Chen, S. Aggregating Large-Scale Generalized Energy Storages to Participate in the Energy and Regulation Market. Energies 2019, 12, 1024. https://doi.org/10.3390/en12061024
Yao Y, Zhang P, Chen S. Aggregating Large-Scale Generalized Energy Storages to Participate in the Energy and Regulation Market. Energies. 2019; 12(6):1024. https://doi.org/10.3390/en12061024
Chicago/Turabian StyleYao, Yao, Peichao Zhang, and Sijie Chen. 2019. "Aggregating Large-Scale Generalized Energy Storages to Participate in the Energy and Regulation Market" Energies 12, no. 6: 1024. https://doi.org/10.3390/en12061024
APA StyleYao, Y., Zhang, P., & Chen, S. (2019). Aggregating Large-Scale Generalized Energy Storages to Participate in the Energy and Regulation Market. Energies, 12(6), 1024. https://doi.org/10.3390/en12061024