1. Introduction
In the last century, AC systems predominated as the most widespread method for energy generation, transmission, and distribution. For regular AC generation, large power plants, e.g., coal, hydro, and nuclear, have been used to centrally generate energy. Alternatives, such as wind and solar generation, are more frequently being installed to decentralize the energy production and lower the CO
2 emitted by the energy production [
1,
2].
Wind farms (AC generation) are more common in remote regions (on and off-shore) where the wind is conducive for generation. Solar (DC generation), on the other hand, started to become viable for application in high populated areas where the sun irradiation is high enough to achieve maximum power generation. DC systems started to be developed and implemented in pilot projects and real applications because they have proved to be more efficient than AC systems in terms of transformation steps [
3], costs [
4], and power transfer capability [
5]. Applications of DC system such as in micro- and nanogrids [
6,
7], datacenters [
8,
9], and aircrafts, where redundancy and backup is mandatory, are currently on the rise. DC system technology can also be implemented in isolated/remote/emerging regions [
10]. In these systems, redundancy normally is indispensable in order to keep the system operational even if a component and/or a converter fails. Furthermore, DC loads are common especially in low voltage/low power applications, for instance, in computer and battery chargers, USB and USB-C ports, and LED lights. These type of loads are commonly found in offices and residences.
Discussions among the voltage levels that are implemented in these systems are extensively presented in the literature [
11], for instance, with a voltage between 350 and 400 V for distribution in unipolar or bipolar [
6,
12,
13] DC configurations to supply high power equipments. The 48 V level is [
14,
15] normally adopted as an intermediate bus stage to supply the low voltage/low power loads aforementioned. The 48 V level is also getting more common in battery systems for Electric Vehicles (EV), and it is considered for residential applications due to its user safety approach.
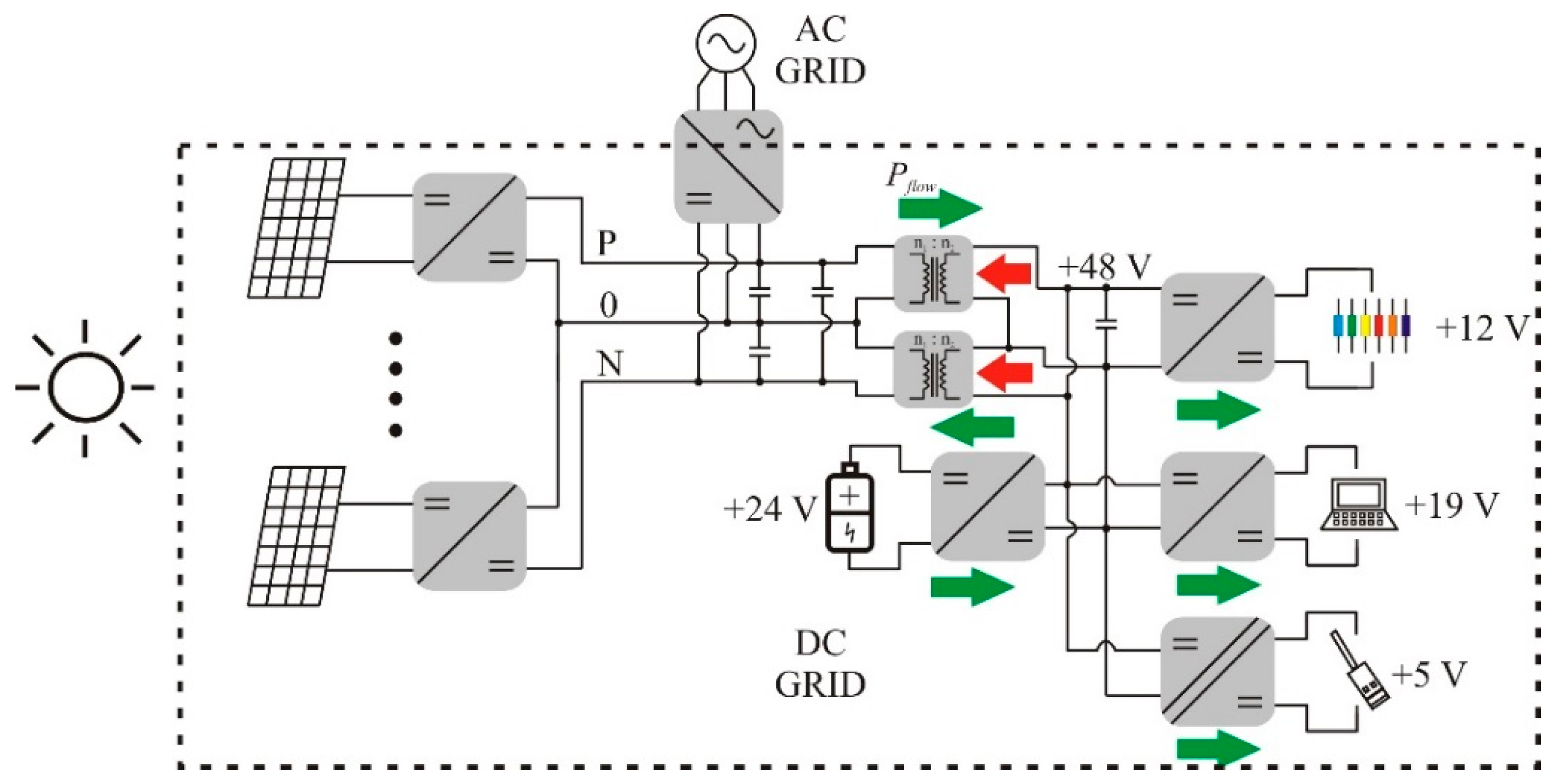
A DC picogrid, based on state-of-the-art architectures [
3,
6,
16], is depicted in
Figure 1, which emulates a building and/or residence with a DC grid implementation. In this grid, a bipolar DC network is realized (P0N poles), which has the possibility of injecting the energy generated by the panels in the AC grid or, alternatively, directly supply DC loads bypassing the DC–AC–DC transformation.
A lot of effort has been spent to propose new topologies and systems to interconnect PV generation in AC or DC grids with, respectively, microinverters [
17,
18,
19] and microconverters (DC power optimizers) [
20,
21,
22,
23,
24] which, in essence, are step-up converters since the PV panel output voltage is lower than the AC grid or DC bus voltages. The control aspects of this system and MPPT strategies are common subjects in the literature [
20,
25,
26,
27].
Different strategies to step-up the voltage have been studied and proposed in the literature, such as: isolated step-up topologies [
17,
21,
28], coupled-inductor, nonisolated topologies [
29,
30,
31,
32,
33,
34,
35], nonisolated topologies with Capacitor–Diode/switch structure [
19,
36,
37,
38], nonisolated topologies with Inductor–Diode/switch [
39,
40] and nonisolated topologies with Capacitor–Diode/switch and Inductor–Diode/switch structures [
41,
42]. These structures are known, respectively, as switched-capacitors and switched-inductors. An adaptation of the Inductor–Diode structure is proposed in [
43], where a capacitor replaces one diode and changes the gain of the structure for step-up applications. Each of the above-mentioned strategies to step-up voltages has its advantages and disadvantages. For instance, isolated topologies and coupled inductor topologies have the flexibility of, based on the turns ratio of the magnetic device, select the suitable output voltage requirement, although it is known that these magnetic components are, together with heatsinks, the bulkiest components in a converter. Switched capacitor and switched inductors do not bring this flexibility once the gain is defined based on the operational duty cycle of the active switches. Inductors are more reliable components than capacitors, giving an advantage in terms of reliability, while capacitors are more compact and more suited for high power density applications.
In step-down conversion ratio converters, the Capacitor–Diode/switch structures are commonly used to improve the step-down ratio of the converters [
44,
45,
46]. On the other hand, the implementation of an Inductor–Diode/switch and Inductor–Capacitor–Diode structures in the step-down conversion ratio is not extensively discussed in the literature, with few exceptions that explore both step-up and step-down structures [
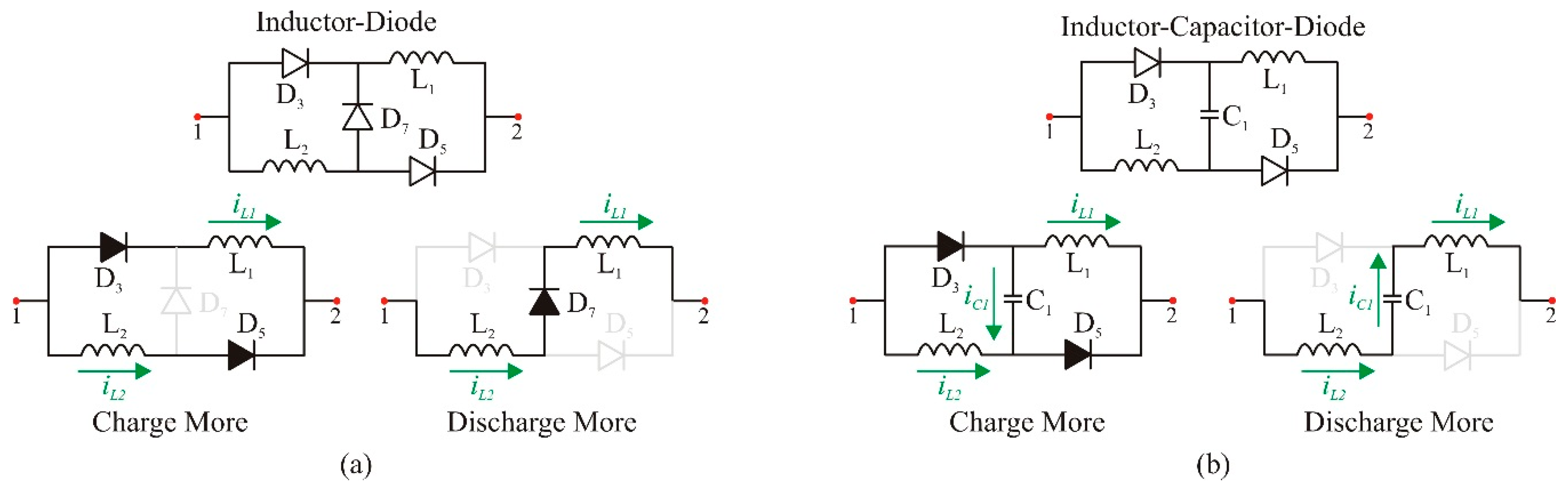
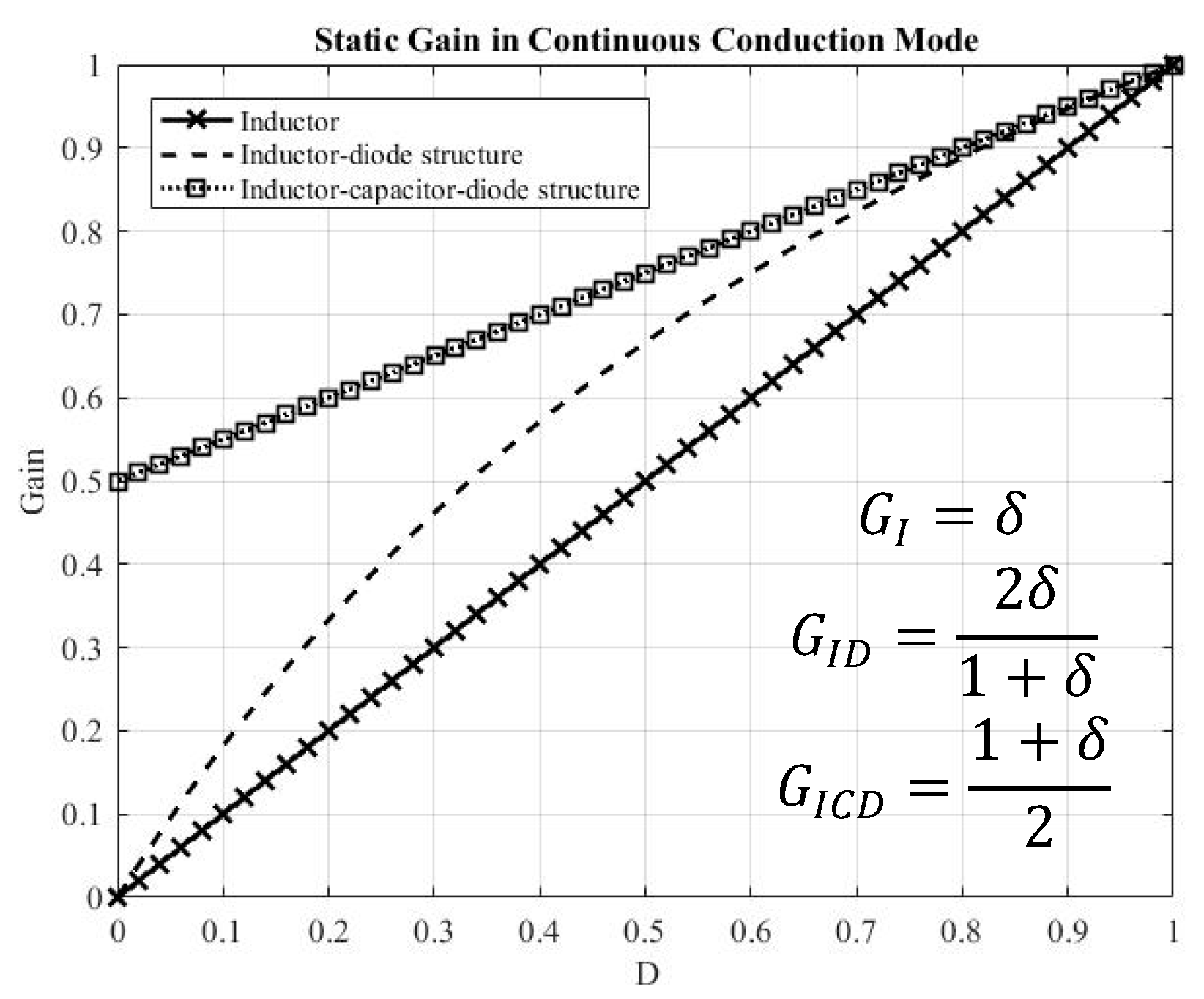
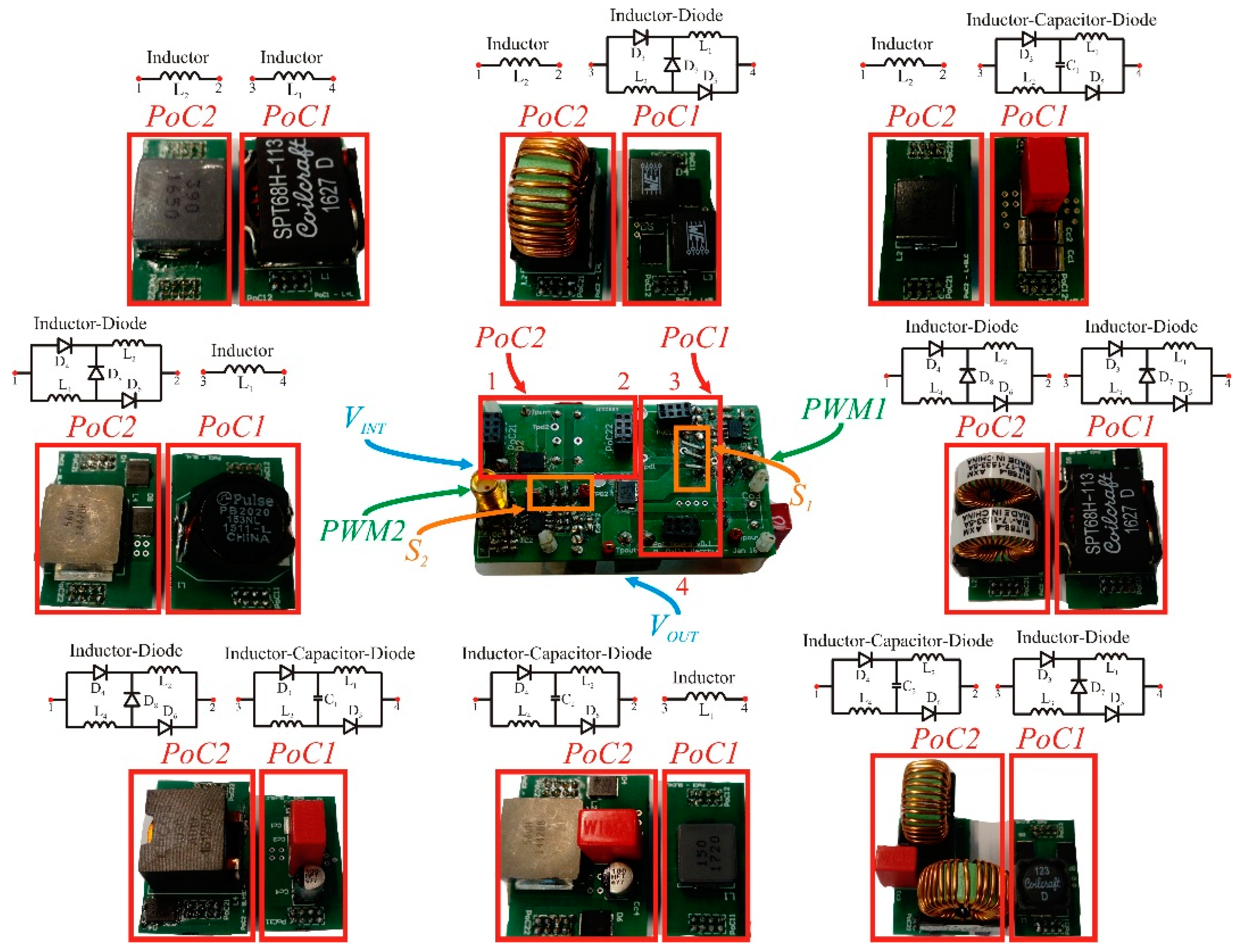
39]. The structures evaluated in this paper are shown in
Figure 2. The Inductor–Diode structure shown in
Figure 2 can offer a redundant path if one diode of the structure fails in open-circuit, as proposed in [
47]. In steady-state, the inductors can be considered as current sources and, due to the structure operability discussed in
Section 4, mitigate the implementation of current sensors for control purposes, since the current balance between the inductors is naturally achieved without any control strategy (switched-inductor characteristic). The only sensor that might be consider for implementation is a voltage sensor, if the application requires a regulated and constant output voltage level for the entire load range of operation. For instance, a contraction technique was proposed to control a regular step-down converter [
48].
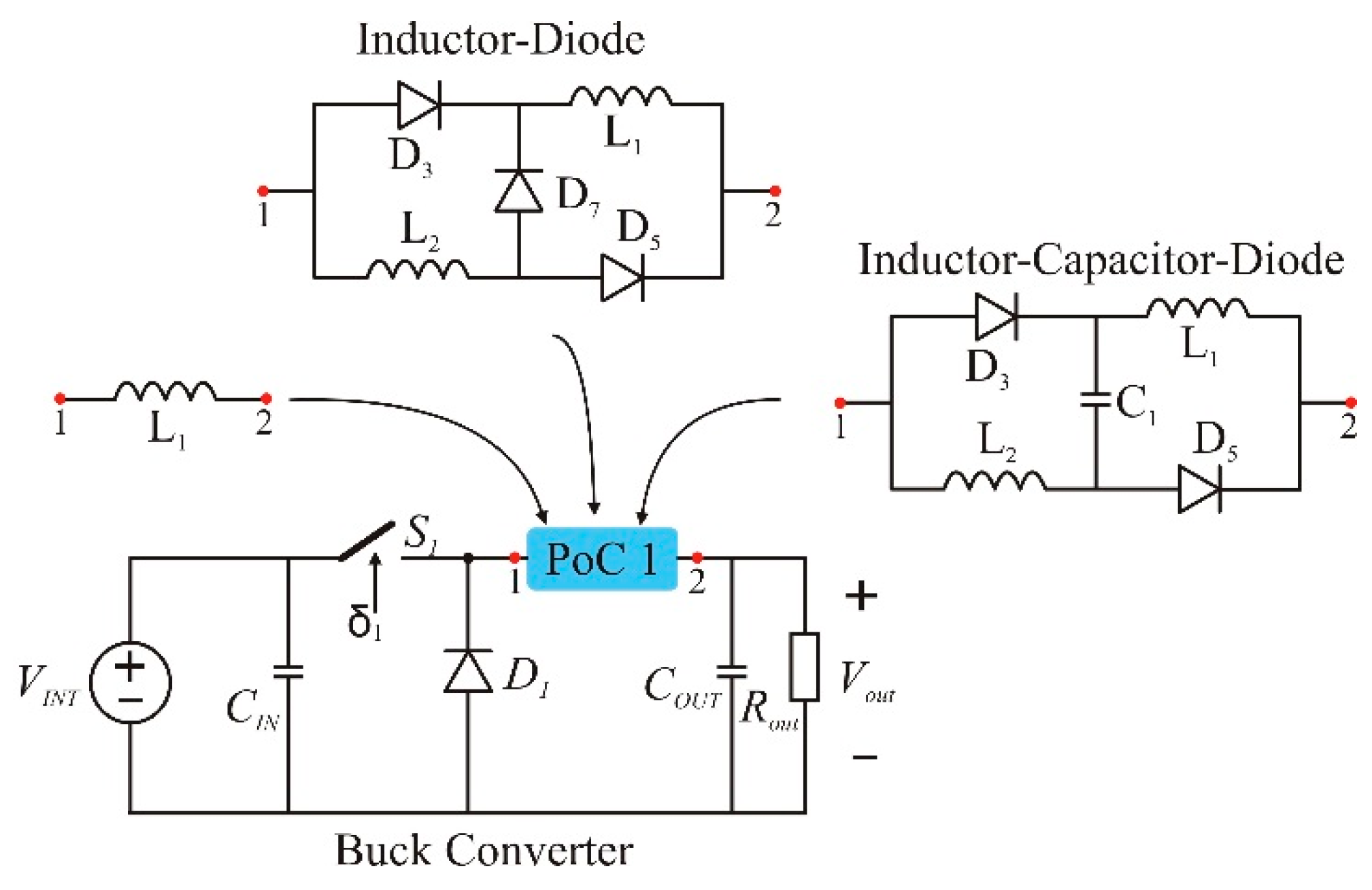
With these considerations, the objective of this paper is to investigate the influence of the Inductor–Diode (ID) and Inductor–Capacitor–Diode (ICD) structures in the step-down conversion stage from 48 V to 12 V input-to-output voltage. The main contributions of this paper are (1) an analysis of the influence of the ID and ICD structures in a step-down conversion system; (2) the presentation of a full theoretical analysis of the converters generated; (3) applying the ID and ICD structures in a quadratic buck converter; (4) analyzing the intermediate voltage level behavior for different operational points, showing the intermediate voltage flexibility of the circuit, which is beneficial for a voltage regulation point of view; (5) creating a flexible test bench to be able to validate the proposed converters and; (6) experimentally validatation with waveforms of the topologies studied in the paper.
The paper is organized as follows;
Section 2 presents the analysis of the ID and ICD structure in a regular single-stage buck converter and its impact on the gain of the converter.
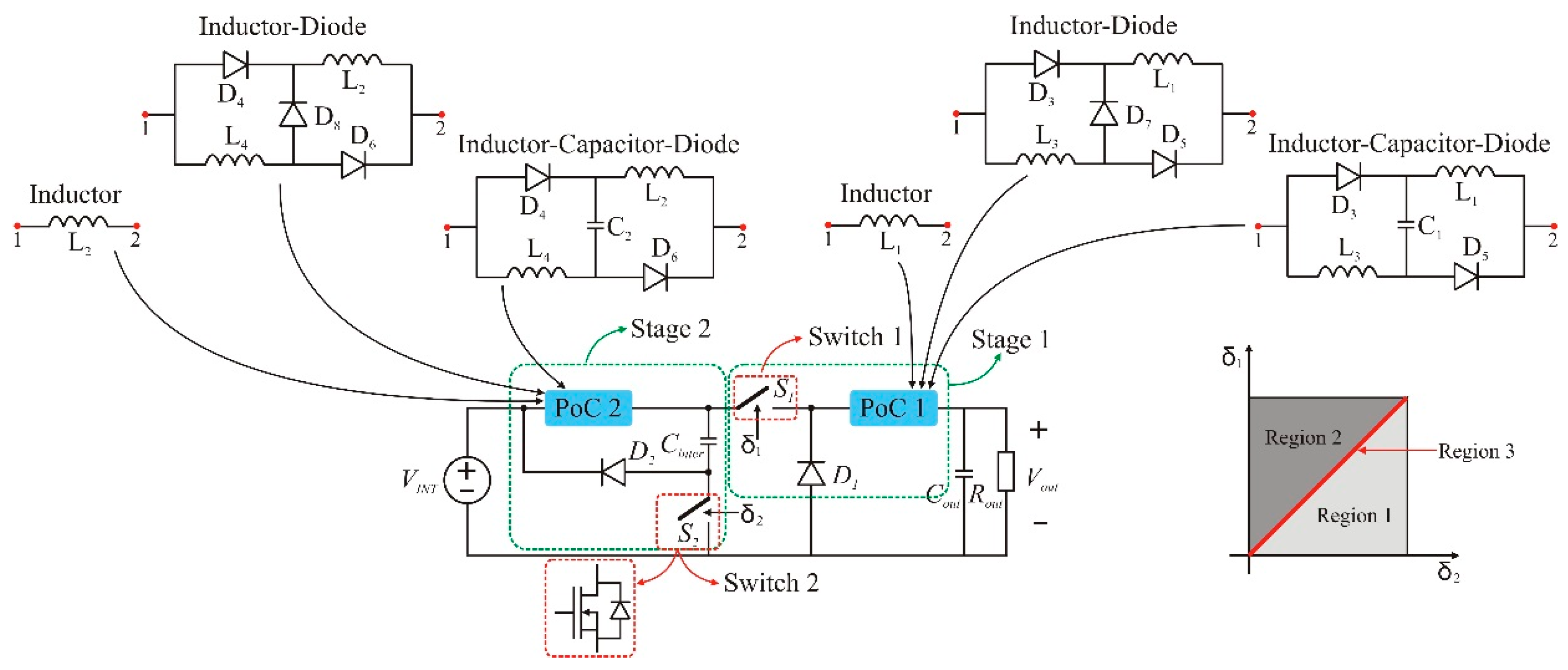
Section 3 presents the two-stage buck converter, known as quadratic buck converter [
49], to enable the converter applying the ID and ICD structures to achieve the required output voltage levels. The operational principle of the topologies generated by the proposed intra-exchangeability is explained in
Section 4.
Section 5 explores the simulation results of the proposed topologies, showing the intermediate and output voltage levels that are obtained for each possible configuration.
Section 6 describes the experimental test bench built for further validation, showing experimental waveforms that validate the theoretical analysis presented in
Section 3 and
Section 4.
Section 7 presents the main conclusions and future work suggestions.
4. Operational Principle of the Double Switch Quadratic Buck Converter in Region 3
Similar to
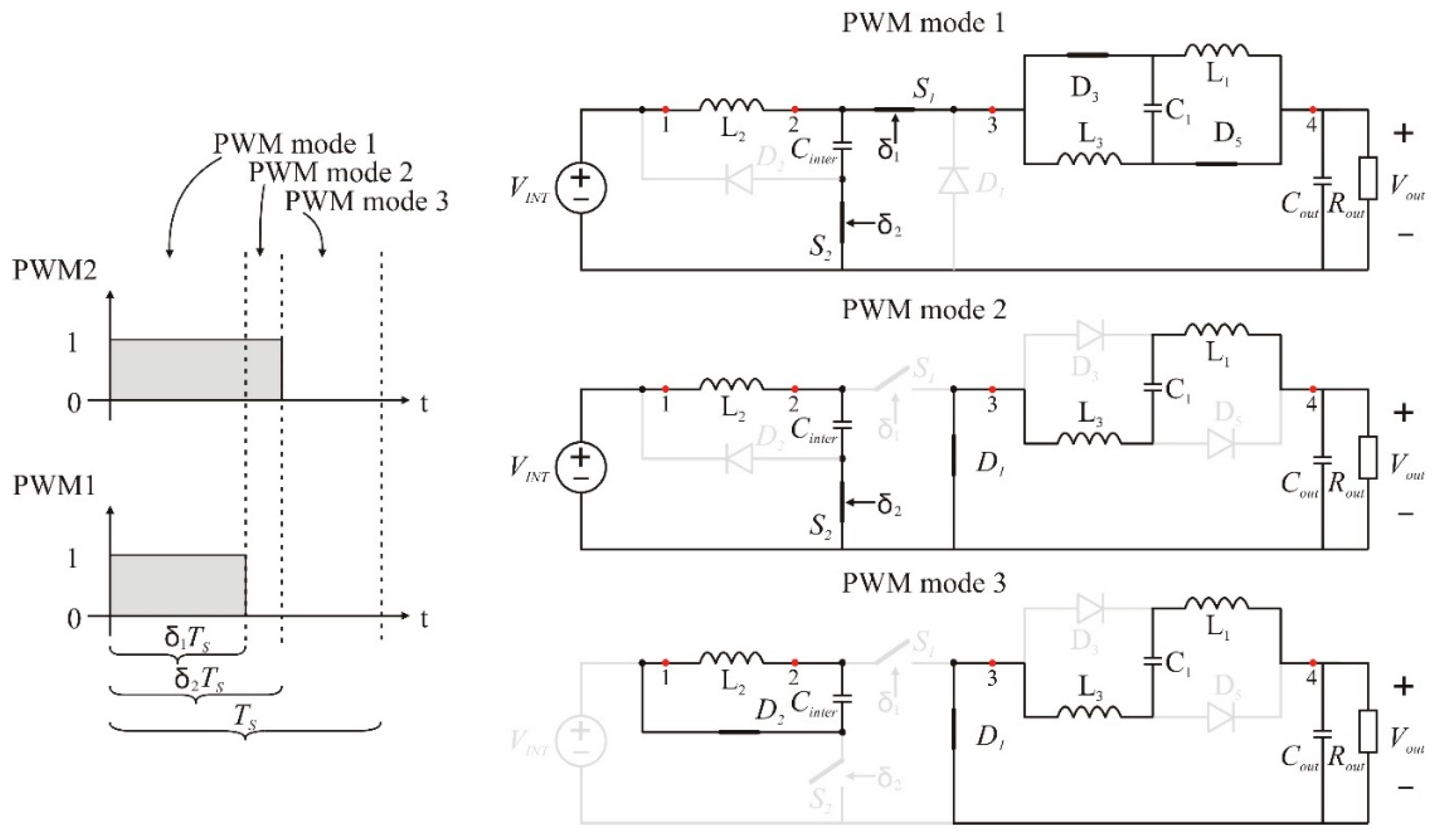
Section 2, where the one-stage I, ID, and ICD topologies have been introduced, this section introduces the PWM modes of the two-stage I, ID, and ICD topologies, where the PWM signal remains the same. The phase shift between δ
2 and δ
1 is considered zero (in phase with each other) for the specific analysis but if differs from zero, the gain behavior shown in
Table 1,
Table 2 and
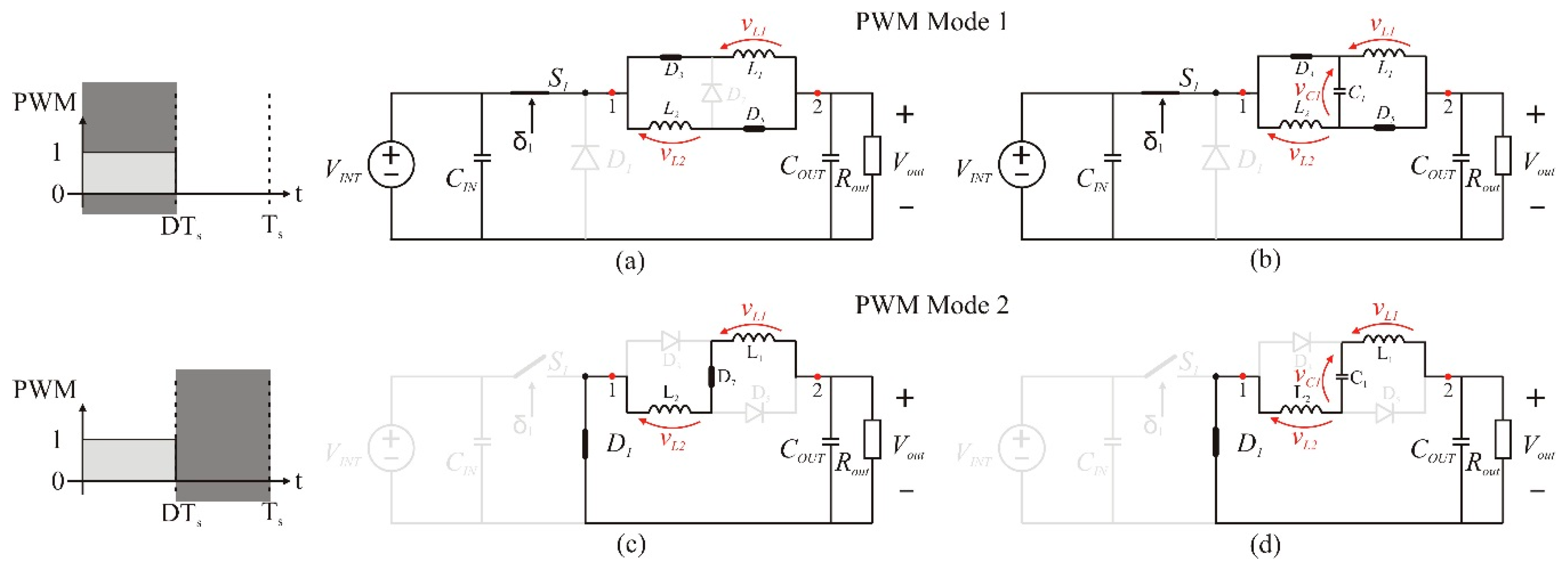
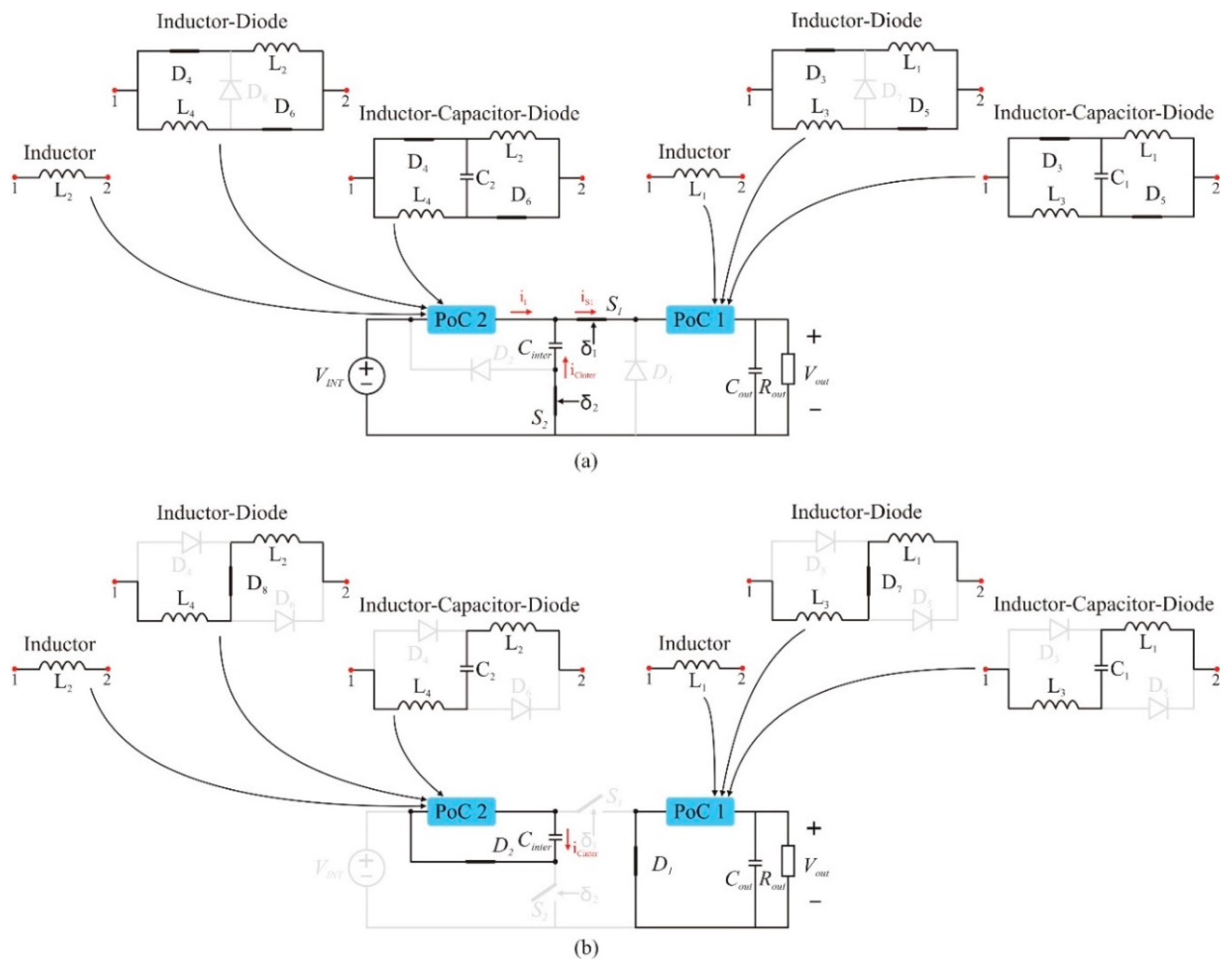
Table 3 will differ, since the phase-shift will influence the PWM stages and, consequently, the gain of the structures. The equivalent circuit for the first and second stages, considering all the possibilities between the exchangeable circuits, are present in
Figure 8a,b, respectively. In order to evaluate the main characteristics of the topologies, the equivalent circuits presented in
Figure 8 are used to mathematically evaluate the voltage and current stresses in all power components. This information is crucial to further dimension the components for practical implementation.
The voltage stress across each power semiconductor are extracted from the PWM mode stages in
Figure 8 and summarized in
Table 4. The voltage stress across switch S
1 and diode D
1 is affected by the structure applied in PoC2, for instance, if the I structure is applied to PoC2, the voltage stress across switch S
1 is defined by
, while if the ID structure is applied in PoC2, the voltage stress across switch S
1 is defined by equation
. Similarly, the voltage stress across diodes D
3/D
5/D
7, connected to PoC1, are related to the structure connected in PoC1. For instance, maintaining PoC2 fixed with the ID structure, if the ID structure is connected to PoC1, the voltage across the diodes D
3/D
5 is expressed by
and, if PoC1 is changed for an ICD structure, the voltage across diodes D
3/D
5 is expressed by
. Switch S
2 and diode D
2 stresses are independent on the structures and are equal to the input voltage V
IN. The voltage stress across diodes D
3-D
4-D
5-D
6-D
7-D
8, which are the diodes implemented in the ID and ICD structures, are related to the operational duty cycle, input voltage, and in which PoC the structures are implemented.
Similarly, the PWM modes also provide the RMS current stress in each power semiconductor. To evaluate the RMS current stress in all components, equation (3) is introduced, where i
x1 is the current that the semiconductor conducts during the first PWM mode and i
x2 is the current conducted during the second PWM mode. Applying (3), the current stress in each semiconductor is characterized and presented in
Table 5. Different than the voltage stress, the current stress of switches S
2 and D
2 depend on the structure connected to PoC2 but are independent of the structure connected to PoC1. For instance, the RMS current stress across switch S
2 is expressed by
if the I structure is connected to PoC2, and expressed by
if the ID structure is connected. It is also noticed that the current is independent on PoC1, in this case.
The analysis abovementioned is important in order to select the components for experimental validation, since the RMS current and voltage stress are the most important characteristics to select MOSFETs and diodes. The next section presents a numerical simulation for the proposed converter performed in PLECS (4.0.2, Plexim GmbH, Zurich, Switzerland).
5. Numerical Simulations
A numerical simulation was carried out to show the available intermediate voltage levels when an output voltage of 12 V is set as standard output voltage. The 12 V voltage level can supply low voltage/low power loads to, for instance, LEDs or to charge small batteries (unidirectional power flow to charge, since the topologies are unidirectional); this is one of the main reasons to fix the output voltage on this level. The simulation and experimental parameters are presented in
Table 6.
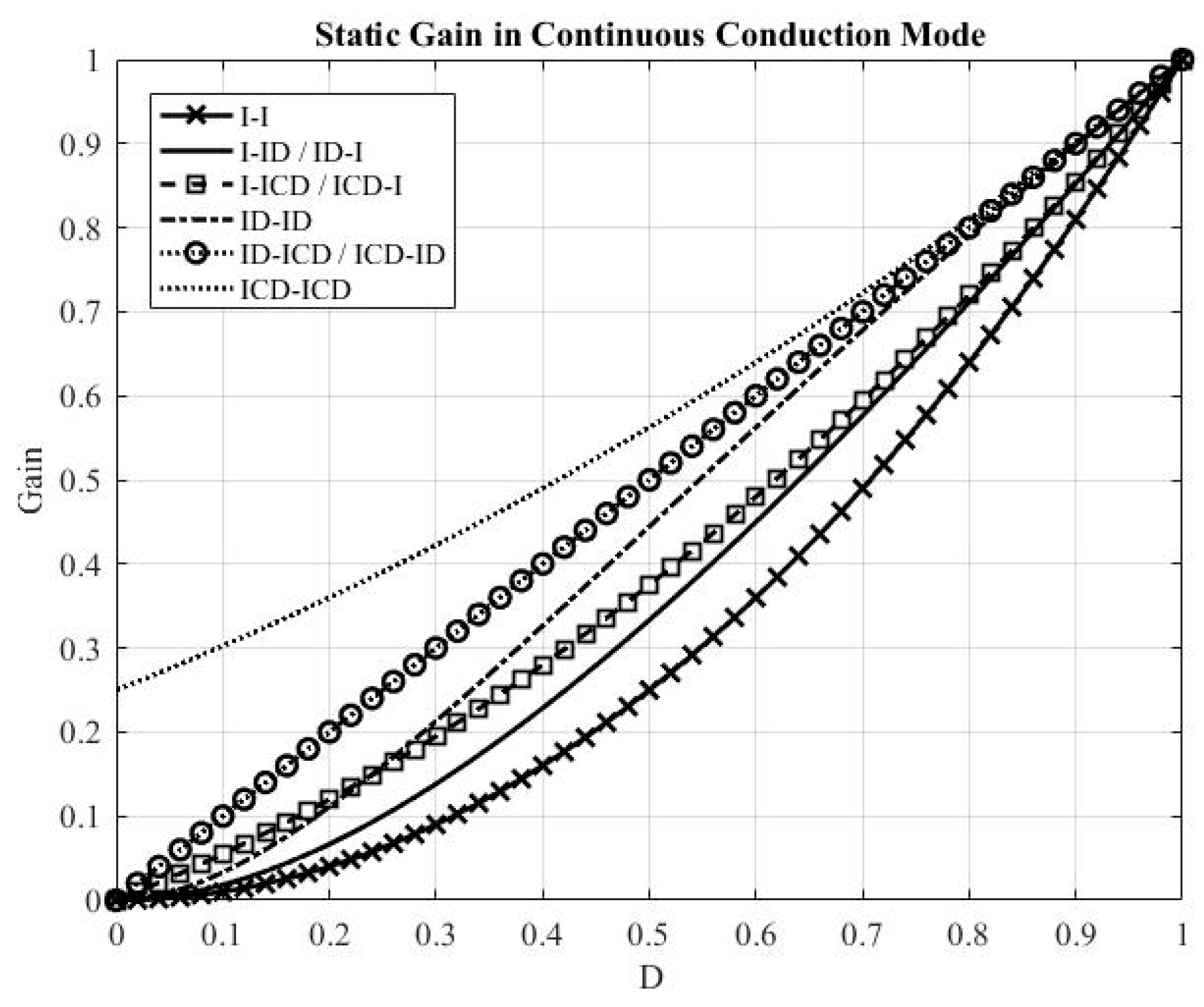
Different intermediate voltage levels are generated, depending on the structure connected in PoC2 and the operational duty cycle of the converter, as shown in
Table 3. The simulation model was develop in PLECS. The only configuration that is not able to be simulated and experimentally validated in this paper is the ICD-ICD structure, since the input/output voltage level is 48 V/12 V and the theoretical gain of this structure is 0.25 < ICD-ICD < 1, making it impossible to provide the required output voltage.
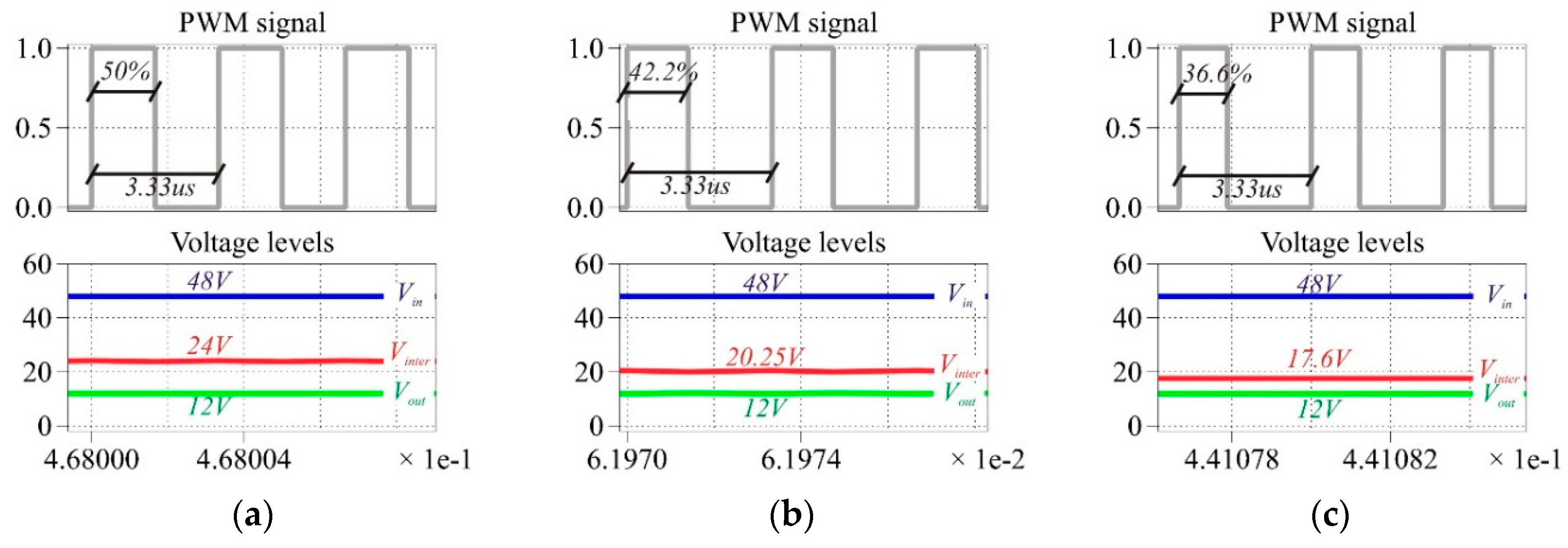
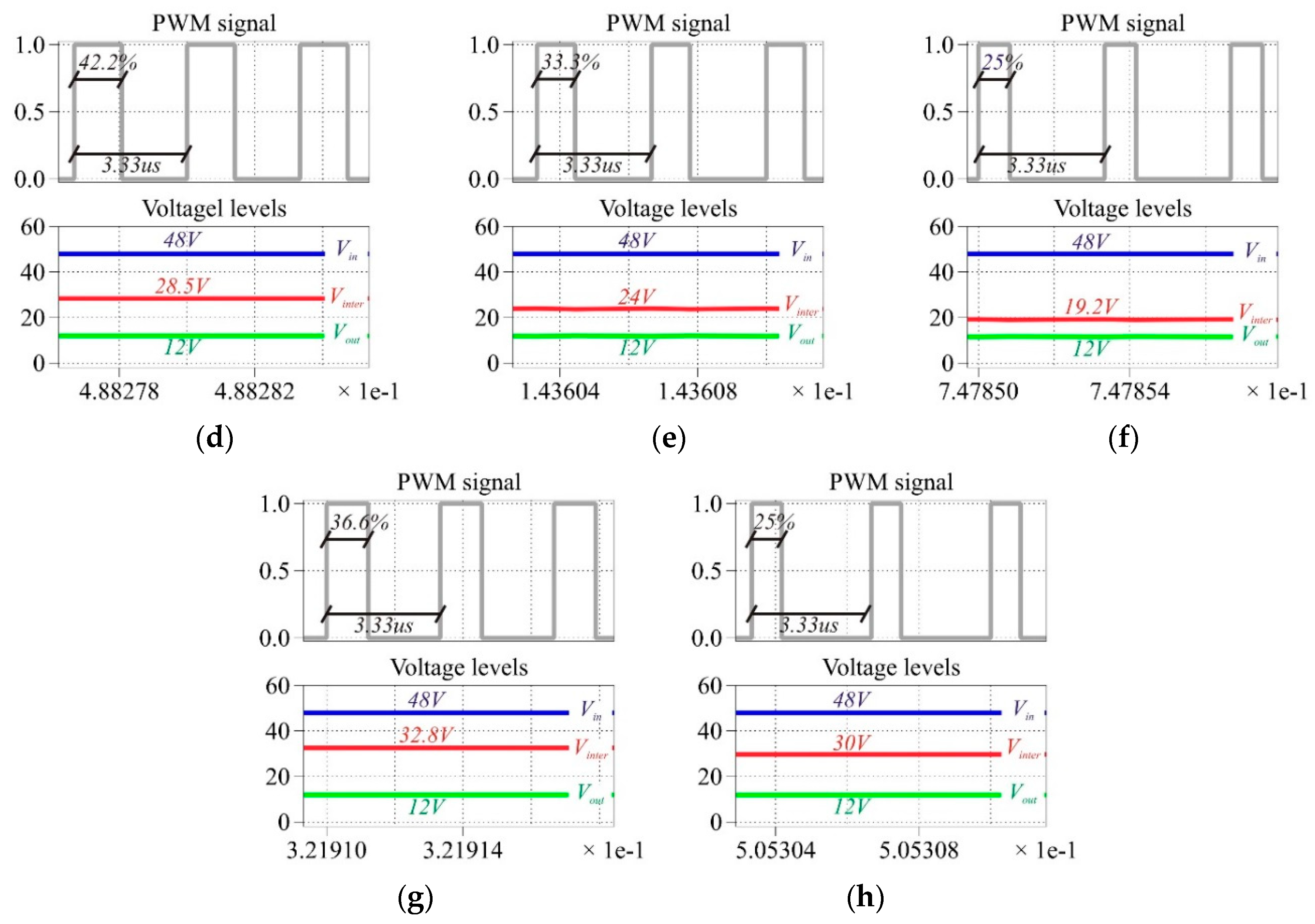
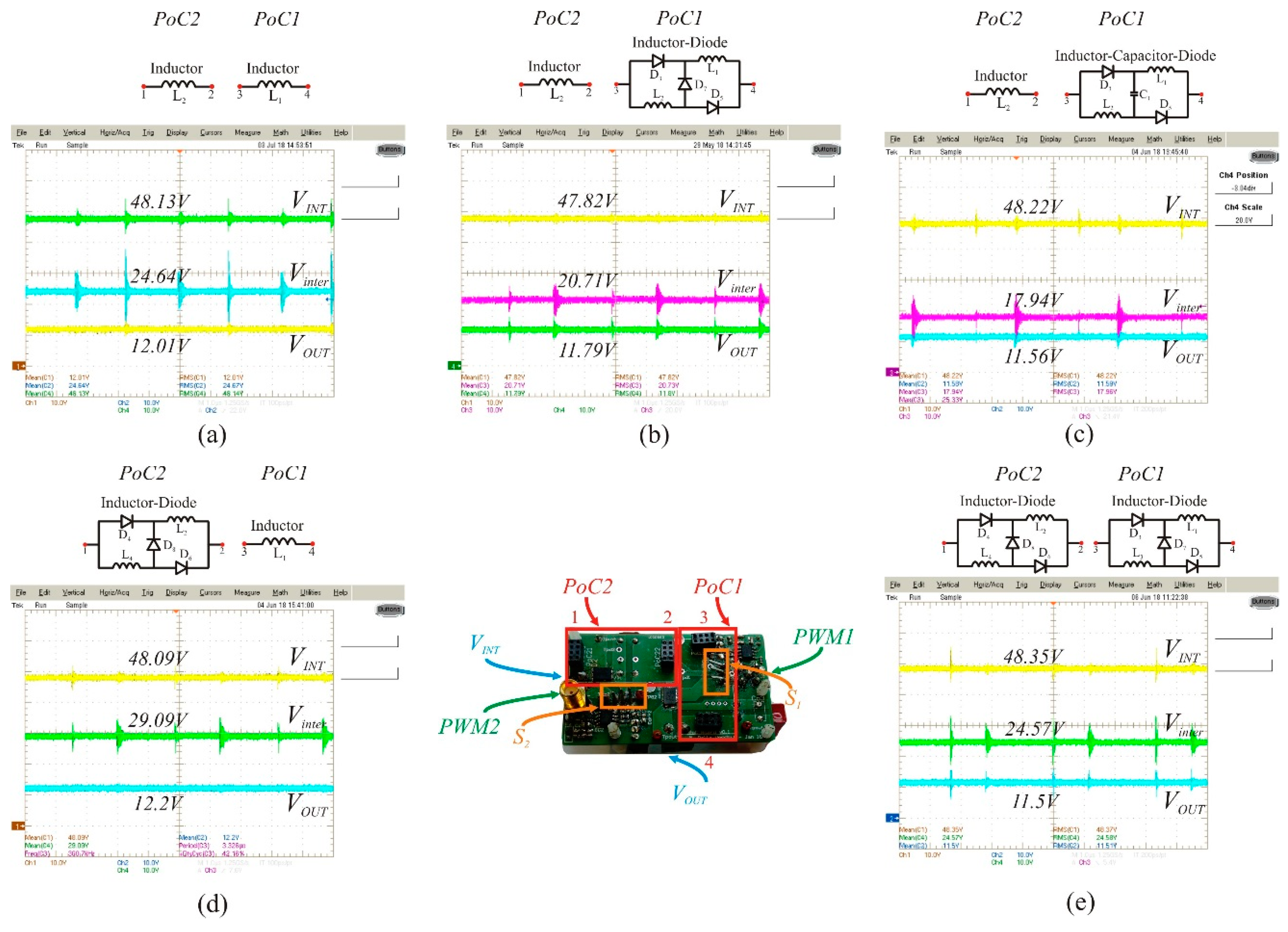
A simulation is performed for each configuration and the results are shown in
Figure 9. The conventional quadratic buck with I-I is show in
Figure 9a, generating an intermediate voltage level of 24 V. According to
Table 3, the I-ID and ID-I configurations generates the same output voltage but different intermediate voltage levels for operation with the same duty cycle. This behavior is proved via simulation and presented in
Figure 9b,d, where the voltage level of 20.25 V (I-ID) and 28.5 V (ID-I) are obtained for a duty cycle of 42.2%.
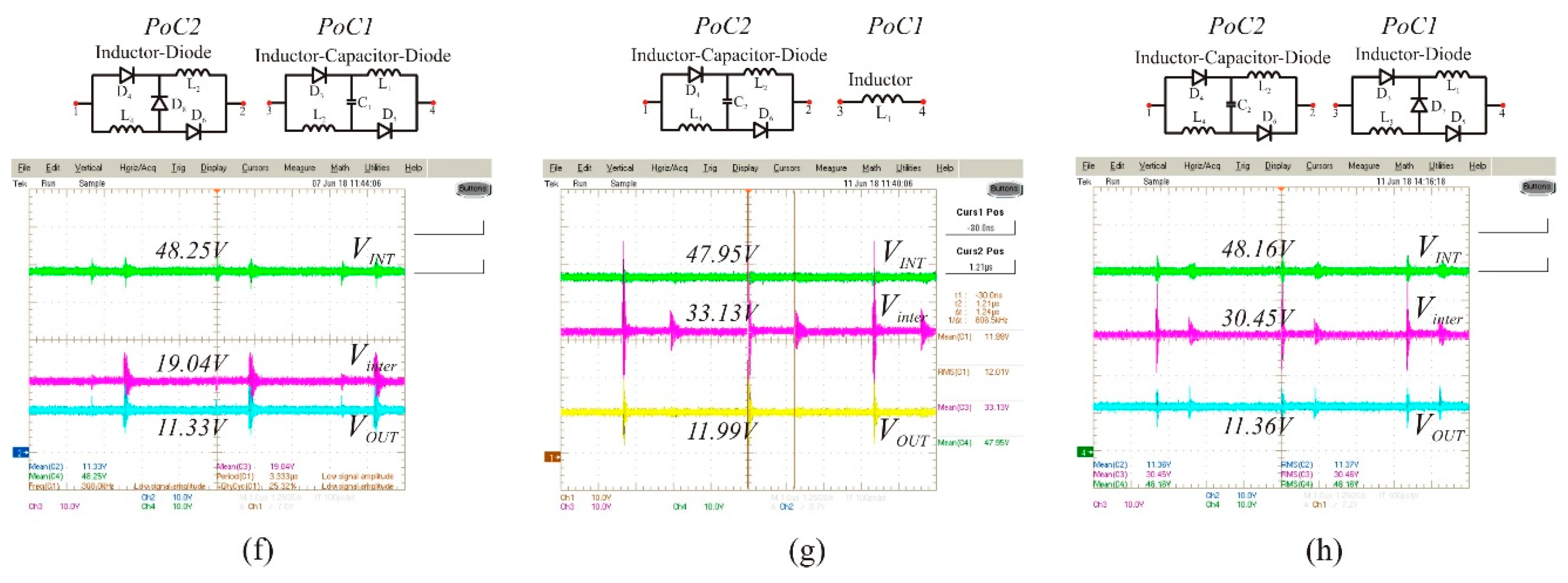
Similarly, the topologies I-ICD and ICD-I operate with the same duty cycle (36.6%) and input/output voltages, however the intermediate voltage level changes since is applied different structures in PoC2. Simulation results shown in
Figure 9c,g confirm the analysis, since an intermediate voltage of 17.6 V (I-ICD) and 32.8 V (ICD-I) are obtained and available to supply loads in different voltage ranges in a flexible way. The structures ID-ICD and ICD-ID are also evaluate via simulation for similar input/output voltages. Intermediate voltages of 19.2 V (ID-ICD) and 30 V (ICD-ID) are obtained and shown in
Figure 9f,h, respectively, validating the theoretical analysis presented in
Table 3. Additionally, the last configurations present similar overall gain (δ) with the regular buck converter, however they present an additional voltage level that can be used to supply additional loads in different voltage levels. The drawback of the structure, compared with the conventional buck, is the component part count, since the number of inductors and diodes in the power stage increase.
Finally, the ID–ID structure is briefly discussed herein.
Figure 9e shows the voltage levels obtained from simulation. Similarly with the conventional I-I quadratic buck, an intermediate voltage level of 24 V is obtained, however an operational duty cycle of 33.3% is used to match the desired output voltage of 12 V.
The simulations were performed with a switching frequency of 300 kHz (switching period of 3.33 µs), since this frequency was used to calculate the I, ID, and ICD inductances for further implementation of the structures. All the inductances were select to present a 20% ripple current limit across the inductors in nominal power. A summary of the theoretical inductor current expressions in each scenario is present in
Table 7, in function of the input current I
IN. From the PWM mode stages discussed in the previous section and shown in
Figure 8a,b, the inductors of the ID and ICD structures charge its terminals in parallel and discharge in series, which guarantees natural balance between the internal currents of the structure. This characteristic enable the non-use of current sensors to control the inductor current, since this control is guarantee directly by the ID and ICD structures, also known as switched-inductor structures. The drawback, as previously mentioned, is the increase in the number of components in the power stage.
With the objective of validating the equations shown in
Table 7, a comparison between the theoretical analysis and numerical simulation results was performed and shown in
Table 8. The input/output voltage of the circuit is 48 V/12 V and a rated input power of 100 W. The different configurations operate with their respective duty cycles to generate an output voltage of 12 V (check
Figure 7 for duty cycle). The comparison shows that the theoretical equations match the simulation results, which proves the validity of the equations to select the correct inductances for experimental verification.
7. Conclusions
The analysis in this paper shows the influence of the ID and ICD structures, previously applied in step-up topologies, in a step-down configuration from 48 V to 12 V input-to-output voltage. To achieve the required voltage levels, a quadratic buck structure was implemented since the first analysis showed that the ID and ICD structures have a lower voltage regulation capability compared with the conventional I structure and, if a single stage buck converter is considered for application, the ICD structure cannot achieve the required output voltage level.
A complete theoretical analysis with PWM stages for all possible regions of operation, voltage gain, voltage/current profiles, and simulation is shown for all possible configurations generated by the substitution of the structures in PoC2 and PoC1. Voltage and current stress were evaluated for dimensioning and component selection to subsequently build the prototype for experimental validation. The analysis showed that the ID and ICD structures change the voltage and current profile depending on which PoC is connected. It is proven that the addition of a second switch S2, together with the operation in Region 1, decreases the voltage stress during turn-off of switch S1. The main advantage of the proposed approach is that the intermediate voltage level can be selected according to the application, since switch S2 is implemented and the ID and ICD structures provide different voltage profiles that can be desired for specific operational duty cycles.
The main advantages of the proposed topologies compared to the conventional buck and quadratic buck converters are as follows.
- (1)
The addition of the second switch S2 and the possibility to choose between I, ID, and ICD structures to connect in PoC2 and PoC1, increase the flexibility of the circuit, resulting in a broad range of intermediate and output voltage levels.
- (2)
The circuits with ID and/or ICD feature diode and inductor redundancy, which leads to lower current stress and a fail-safe structure, after all, if one diode/inductor fails in open-circuit, the system can still maintain its functionality but with limited power.
- (3)
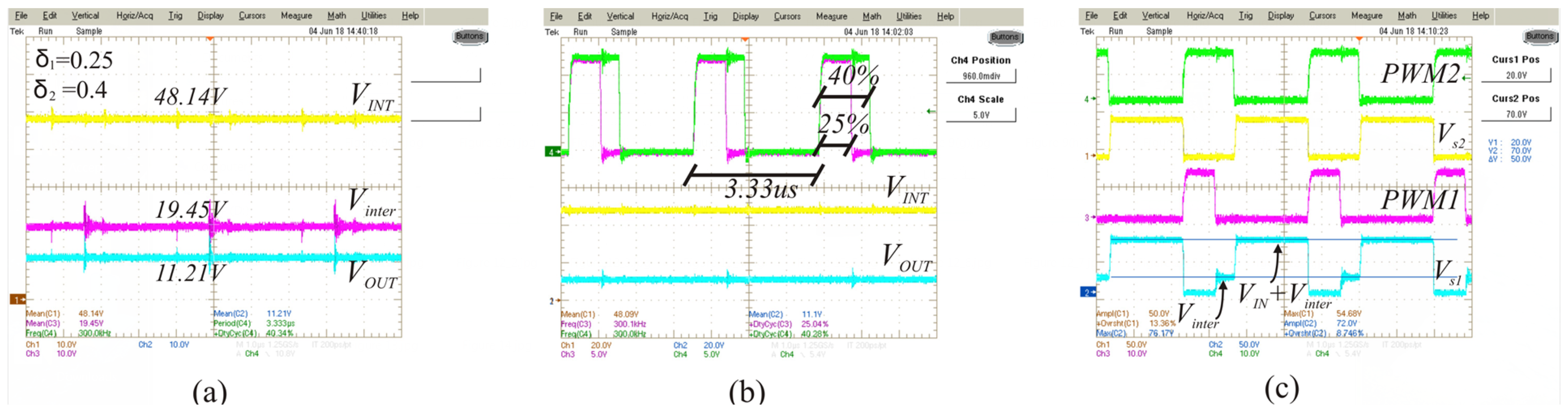
The implementation of S
2 also increase the number of regions of operation, since region 1 is now a possible region of operation. In this region, the blocking voltage of switch S
1 decreases from V
IN + V
inter to only V
inter, as shown in
Section 6.
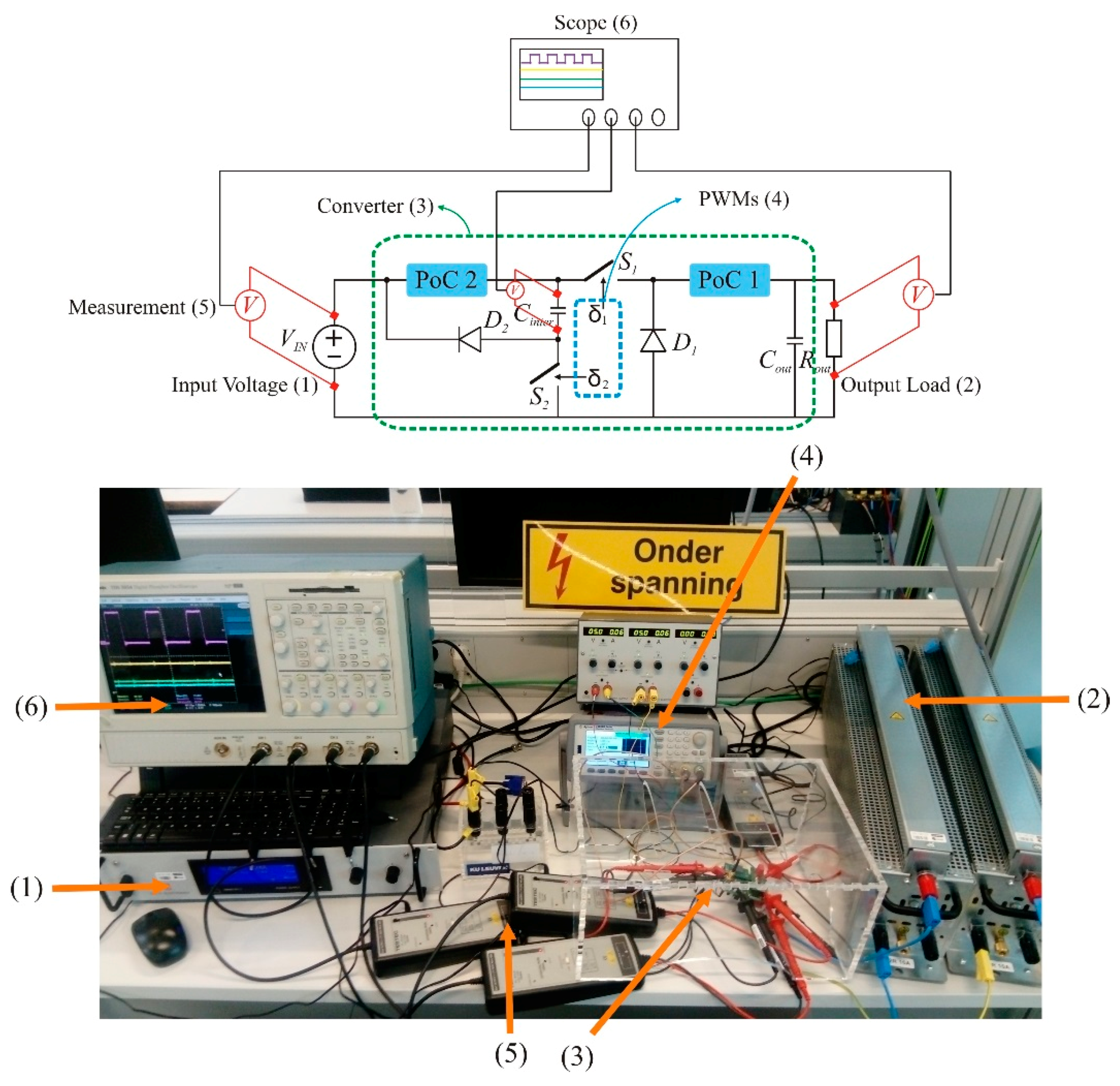
A test bench was assembled and experimental results showing that the ID and ICD structures can be used for small voltage adjustments in a step-down application were presented. Simulation and experimental waveforms were presented to validate the theoretical analysis in
Section 4. The ID and ICD proved to be effective structures for applications where small voltage adjustments are required, but did not prove being useful solutions when a high step-down voltage level is required due to its gain characteristics.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}