Classification and Review of Pump-Controlled Differential Cylinder Drives

 ,
,  ,
,
Abstract
:1. Introduction
2. Overview of Pump-Controlled Differential Cylinder Drives
3. Classification of Pump-Controlled Differential Cylinder Drives
- The classes based on variable-speed electric drives combined with variable-displacement hydraulic pumps are omitted in this classification due to the lack of research efforts and the higher cost. It is however likely that a higher energy efficiency is obtainable [42,49,50], meaning that future pump-controlled cylinder drives may be based on this approach.
- The classification only includes the use of one or two prime movers, as none of the considered publications deal with more prime movers.
- The classes based on two constant-speed prime movers are not considered because this is only relevant for dimensioning considerations. The general functioning of the drive does not change compared to using a single prime mover, because the control functionality is handled by the variable-displacement pump(s).
- Classes based on two variable-speed prime movers in combination with a single hydraulic pump are omitted, because this architecture is functionally similar to single variable-speed prime mover and single-pump classes.
4. Reviewing and Classifying the State-of-the-Art
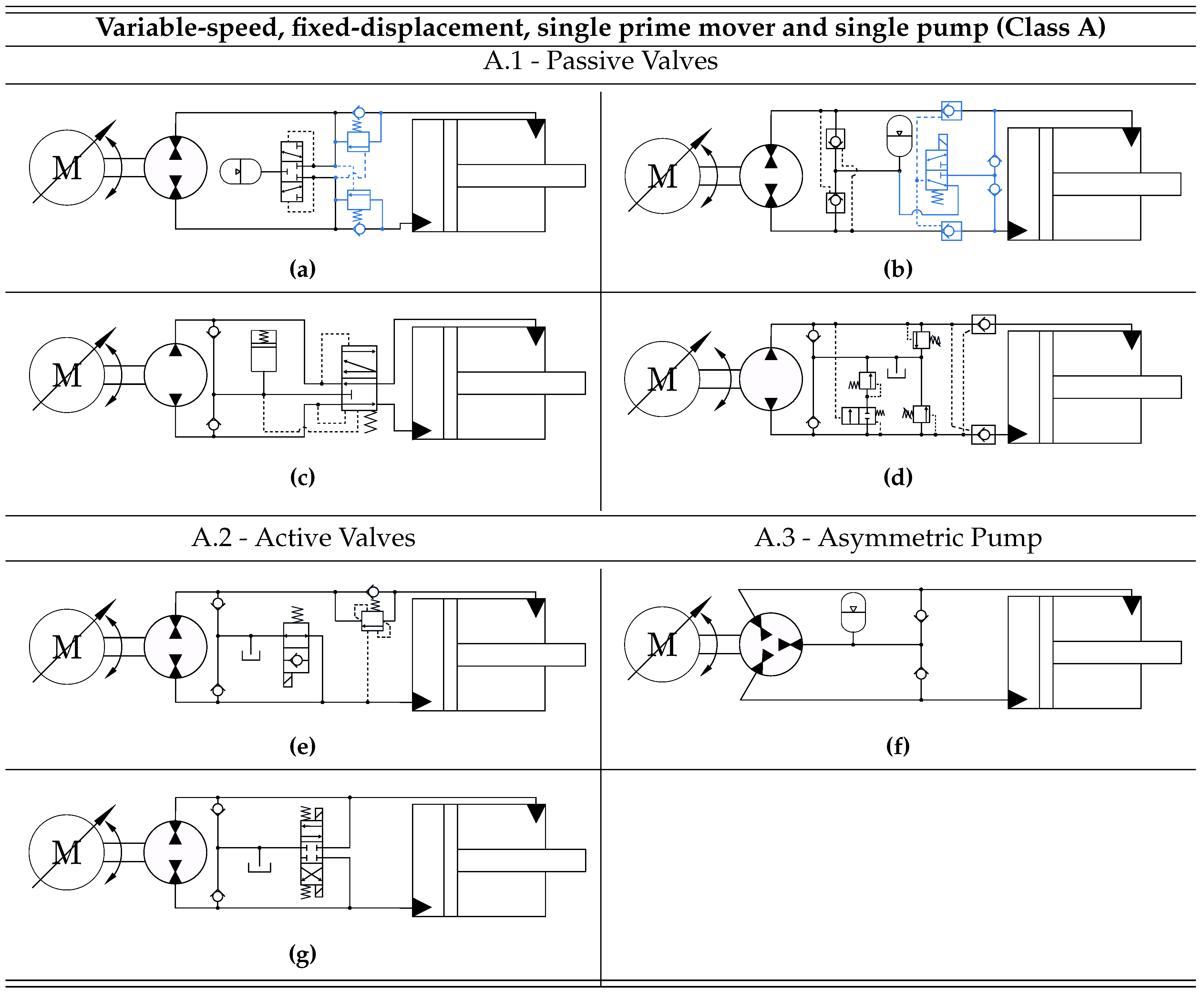
4.1. Class A—Single Variable-Speed Prime Mover and Single Pump
4.1.1. A.1—Passive Valves
4.1.2. A.2—Active Valves
4.1.3. A.3—Asymmetric Pump
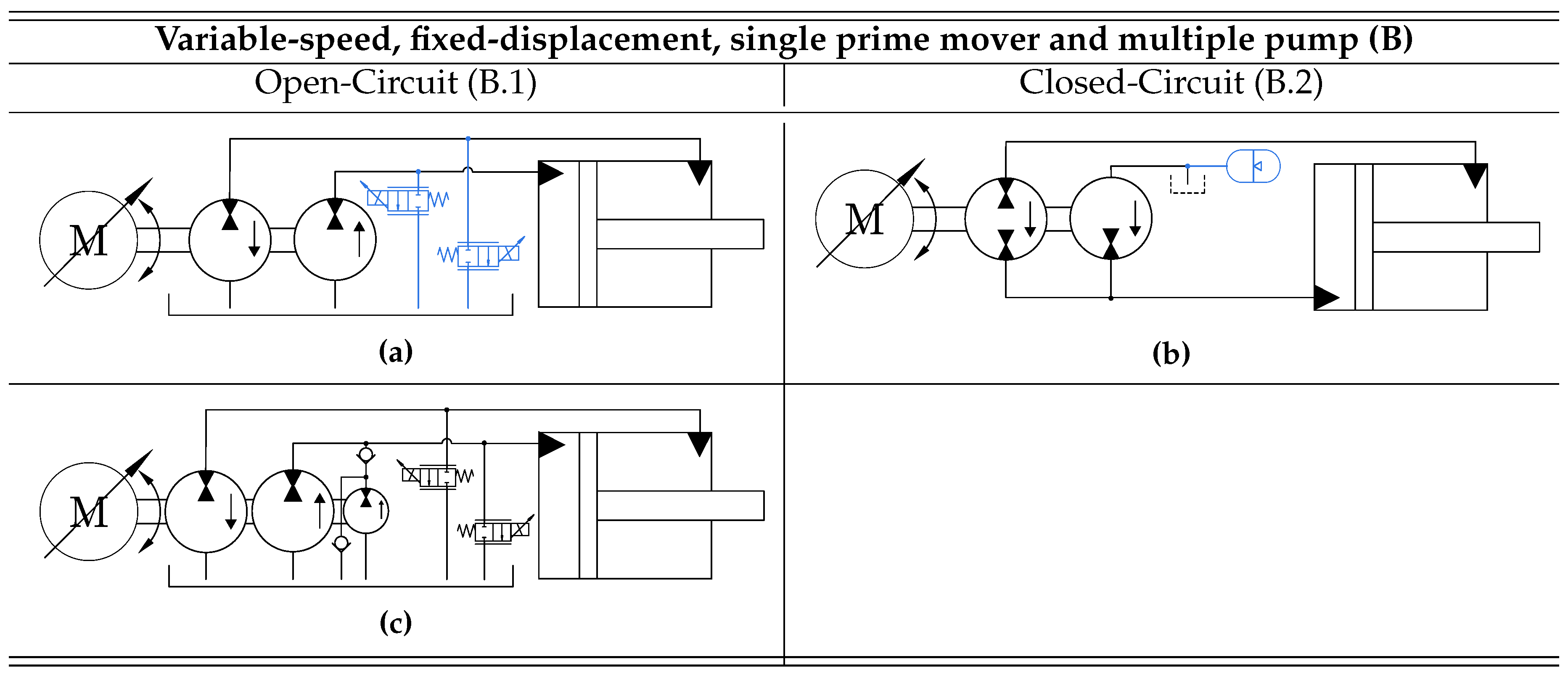
4.2. Class B—Variable-Speed Single Prime Mover with Multiple Pumps
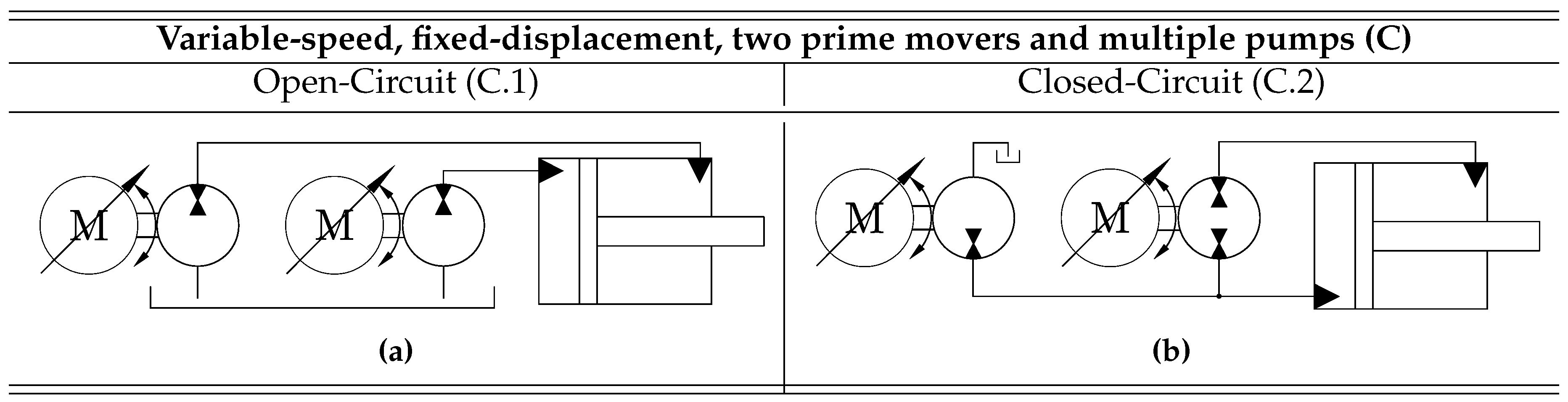
4.3. Class C—Two Variable-Speed Prime Movers and Multiple Pumps
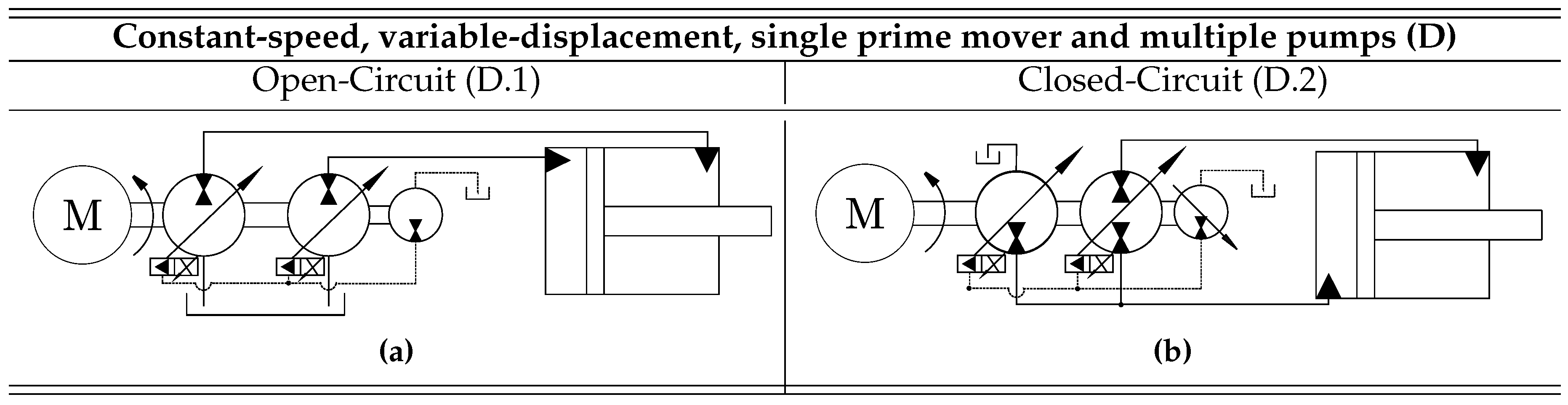
4.4. Class D—Single Constant-Speed Prime Mover and Multiple Pumps
4.5. Class E—Single Constant-Speed Prime Mover and Single Pump
4.5.1. E.1—Passive Valves
4.5.2. E.2—Hydraulic Transformer
4.5.3. E.3—Directional Control Valves
5. Current and Future Research Topics
- Energy efficiency including energy recovery
- Compactness (Self-contained system)
- Only electrical and mechanical (machine) interface
- Scalability/application range
- Fluid management (cooling, filtration)
- Drive stiffness
- Reliability and durability
- Safety functionality
6. Classification Summary
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Brahmer, B. CLDP—Hybrid Drive using Servo Pump in Closed Loop. In Proceedings of the 8th International Fluid Power Conference, Dresden, Germany, 26–28 March 2012; pp. 93–102. [Google Scholar]
- Weber, J.; Beck, B.; Fischer, E.; Ivantysyn, R.; Kolks, G.; Kunkis, M.; Lohse, H.; Lübbert, J.; Michel, S.; Schneider, M.; Shabi, L.; Sitte, A.; Weber, J.; Willkomm, J. Novel System Architectures by Individual Drives. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016; pp. 29–62. [Google Scholar]
- Padovani, D.; Ketelsen, S.; Hagen, D.; Schmidt, L. A Self-Contained Electro-Hydraulic Cylinder with Passive Load-Holding Capability. Energies 2019, 12, 292. [Google Scholar] [CrossRef]
- Frischemeier, S. Electrohydrostatic actuators for aircraft primary flight control-types, modelling and evaluation. In Proceedings of the 5th Scandinavian International Conference on Fluid Power, SICFP ’97, Linköping, Sweden, 28–30 May 1997; pp. 1–16. [Google Scholar] [CrossRef]
- van den Bossche, D. The A380 Flight Control Electrohydrostatic Actuators, Achievements and Lessons Learnt. In Proceedings of the ICAS 25TH International Congress of the Aeronautical Sciences, Hamburg, Germany, 3–8 September 2006; pp. 1–8. [Google Scholar]
- Mare, J.C. Combining Hydraulics and Electrics for Innovation and Performance Improvement in Aerospace Actuation. In Proceedings of the 12th Scandinavian International Conference on Fluid Power, Tampere, Finland, 18–20 May 2011; pp. 255–270. [Google Scholar]
- Hagen, D.; Pawlus, W.; Ebbesen, M.K.; Andersen, T.O. Feasibility Study of Electromechanical Cylinder Drivetrain for Offshore Mechatronic Systems. Model. Identif. Control A Nor. Res. Bull. 2017, 38, 59–77. [Google Scholar] [CrossRef]
- Hedegaard Hansen, A.; Pedersen, H.C. Optimal configuration of a discrete fluid power force system utilised in the PTO for WECs. Ocean Eng. 2016, 117, 88–98. [Google Scholar] [CrossRef]
- Hedegaard Hansen, A.; F Asmussen, M.; Bech, M.M. Energy optimal tracking control with discrete fluid power systems using model predictive control. In Proceedings of the Ninth Workshop on Digital Fluid Power, Aalborg, Denmark, 7–8 September 2017. [Google Scholar]
- Hedegaard Hansen, A.; F Asmussen, M.; Bech, M.M. Model Predictive Control of a Wave Energy Converter with Discrete Fluid Power Power Take-Off System. Energies 2018, 11, 635. [Google Scholar] [CrossRef]
- Linjama, M.; Vihtanen, H.P.; Sipola, A.; Vilenius, M. Secondary Controlled Multi-chamber Hydraulic Cylinder. In Proceedings of the 11th Scandinavian International Conference on Fluid Power, Linköping, Sweden, 2–4 June 2009; pp. 1–15. [Google Scholar]
- Huova, M.; Aalto, A.; Linjama, M.; Huhtala, K.; Lantela, T.; Pietola, M. Digital hydraulic multi-pressure actuator–the concept, simulation study and first experimental results. Int. J. Fluid Power 2017, 18, 141–152. [Google Scholar] [CrossRef]
- Achten, P.A.J. What a Difference a Hole Makes—The Commercial Value of the INNAS Hydraulic Transformer. In Proceedings of the Sixth Scandinavian International Conference on Fluid Power, Tampere, Finland, 26–28 May 1999; pp. 873–886. [Google Scholar]
- Vael, G.; Achten, P.; Potma, J. Cylinder Control with Floating Cup Hydraulic Transformer. In Proceedings of the Eighth Scandinavian Conference on Fluid Power, Tampere, Finland, 7–9 May 2003; pp. 175–190. [Google Scholar]
- Heybroek, K.; Vael, G.; Palmberg, J.O. Towards Resistance-free Hydraulics in Construction Machinery. In Proceedings of the 8th International Fluid Power Conference, Dresden, Germany, 26–28 March 2012; Volume 2, pp. 123–138. [Google Scholar]
- Dluzik, K. Entwiklung und Untersuchung energiesparender Schaltungskonzepte für Zylinderantriebe am Drucknetz. Ph.D. Thesis, RWTH Aachen, Aachen, Germany, 1989. (In German). [Google Scholar]
- Hassi, T.; Korva, A.; Markkula, S.; Paratanen, T.; Sourander, T.; Kiviluoma, P.; Korhonen, A.; Kuosmanen, P. Improving Energy Efficiency of an Electric Mini Excavator. In Proceedings of the 11th International DAAAM Baltic Conference, Tallinn, Estonia, 20–22 April 2016. [Google Scholar]
- Minav, T.; Heikkinen, J.E.; Pietola, M. Direct driven hydraulic drive for new powertrain topologies for non-road mobile machinery. Electr. Power Syst. Res. 2017, 152, 390–400. [Google Scholar] [CrossRef]
- Ristic, M.; Wahler, M. Electrification of Hydraulics Opens New Ways for Intelligent Energy-Optimized Systems. In Proceedings of the 11th International Fluid Power Conference, Aachen, Germany, 19–21 March 2018. [Google Scholar]
- Helbig, A.; Boes, C. Electric Hydrostatic Actuation-modular building blocks for industrial applications. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016; pp. 93–102. [Google Scholar]
- Michel, S.; Weber, J. Electrohydraulic Compact-drives for Low Power Applications considering Energy-efficiency and High Inertial Loads. In Proceedings of the 7th FPNI PhD Symposium on Fluid Power, Reggio Emilia, Italy, 27–30 June 2012; pp. 1–18. [Google Scholar]
- Michel, S.; Weber, J. Energy-efficient electrohydraulic compact drives for low power applications. In Proceedings of the ASME/BATH 2012 Fluid Power and Motion Control, Bath, UK, 12–14 September 2012; pp. 93–107. [Google Scholar]
- Rexroth, Bosch AG. Internal Gear Pump PGM Series 4X, RE10235. 2014. Available online: https://md.boschrexroth.com/modules/BRMV2PDFDownload-internet.dll/re10235_2014-09.pdf?db=brmv2&lvid=1182639&mvid=13907&clid=20&sid=77703FE74E26CCE9963705CEDFFFF9EE.borex-tc&sch=M&id=13907,20,1182639 (accessed on 3 April 2019).
- Rexroth, Bosch AG. External Gear Motors. RE 14026. 2005. Available online: https://md.boschrexroth.com/modules/BRMV2PDFDownload-internet.dll/re14026_2009-05.pdf?db=brmv2&lvid=1143155&mvid=13907&clid=20&sid=77703FE74E26CCE9963705CEDFFFF9EE.borex-tc&sch=M&id=13907,20,1143155 (accessed on 3 April 2019).
- Rexroth, Bosch AG. External Gear Pump Series B, RE10088. 2013. Available online: https://md.boschrexroth.com/modules/BRMV2PDFDownload-internet.dll/re10088_2019-01.pdf?db=brmv2&lvid=1210039&mvid=13907&clid=20&sid=77703FE74E26CCE9963705CEDFFFF9EE.borex-tc&sch=M&id=13907,20,1210039 (accessed on 3 April 2019).
- Parker Hannifin. Gear Pumps/Motors Series PGP/PGM Fixed Displacement Pumps, Cast-Iron and Aluminium Designs. Catalogue HY30-3300/UK. Available online: https://www.parker.com/literature/PMDE/Catalogs/Gear_Units/PGP_PGM/HY30-3300-UK.pdf (accessed on 3 April 2019).
- Rexroth, Bosch AG. Axial Piston Units A10FZO, A10VZO and A10FZG, A10VZG Series 10 for variable-speed drives. RE91485. 2016. Available online: https://md.boschrexroth.com/modules/BRMV2PDFDownload-internet.dll/RE91485_2016-10.pdf?db=brmv2&lvid=1199007&mvid=13907&clid=20&sid=77703FE74E26CCE9963705CEDFFFF9EE.borex-tc&sch=M&id=13907,20,1199007 (accessed on 3 April 2019).
- Parker Hannifin. Axial Piston Pumps Series PVplus Variable Displacement, Catalogue MSG30-3245/UK. Available online: http://www.parker.com/Literature/PMDE/Catalogs/Piston_Pumps/PV+/MSG30-3245UK.pdf (accessed on 3 April 2019).
- Merritt, H.E. Hydraulic Control Systems; Wiley: New York, NY, USA, 1967. [Google Scholar]
- Sprockhoff, V. Untersuchungen von Regelungen am hydrostatischen Zylinderantrieb mit Servopumpe. Ph.D. Thesis, RWTH Aachen, Aachen, Germany, 1979. (In German). [Google Scholar]
- Backé, W.; Berbuer, J. Neue Schaltungskonzepte fur hydrostatische Getriebe. Ölhydraul. Pneum. 1987, 31, 518–525. (In German) [Google Scholar]
- Backé, W. Möglichkeiten zur Energieeinsparung in der Hydraulik. In Proceedings of the 11. Aachener Fluidtechnisches Kolloquium, Aachen, Germany, 8–10 March 1994; pp. 201–235. (In German). [Google Scholar]
- Berbuer, J. Neuartige Servoantriebe mit primärer Verdrängersteuerung. Ph.D. Thesis, RWTH Aachen, Aachen, Germany, 1988. (In German). [Google Scholar]
- Hahmann, W. Das Dynamische Verhalten hydrostatischer Antriebe mit Servopumpe und ihr Einsatz in Regelkreisen. Ph.D. Thesis, RWTH Aachen, Aachen, Germany, 1973. (In German). [Google Scholar]
- Backé, W. Hydraulic Drives With High Efficiency. In Proceedings of the International Mechanical Engineering Congress, Fluid Power Systems and Technology, San Francisco, CA, USA, 12–17 November 1995; Volume 2, pp. 45–73. [Google Scholar]
- Backé, W. The present and future of fluid power. Proc. Inst. Mech. Eng. 1993, 207, 193–212. [Google Scholar] [CrossRef]
- Rahmfeld, R.; Ivantysynova, M. New displacement Controlled Linear Actuator Technology—A Suitable Control Element for Active Oscillation Damping. In Proceedings of the Eighth Scandinavian International Conference on Fluid Power, Tampere, Finland, 7–9 May 2003; pp. 1139–1155. [Google Scholar]
- Berg, H.; Ivantysynova, M. Design and testing of a robust linear controller for secondary controlled hydraulic drive. Proc. Inst. Mech. Eng. Part I 1999, 213, 375–386. [Google Scholar] [CrossRef]
- Grabbel, J.; Ivantysynova, M. An Investigation of Swash Plate Control Concepts for Displacement Controlled Actuators. Int. J. Fluid Power 2005, 6, 19–36. [Google Scholar] [CrossRef]
- Imam, A.; Rafiq, M.; Jalayeri, E.; Sepehri, N. Design, Implementation and Evaluation of a Pump-Controlled Circuit for Single Rod Actuators. Actuators 2017, 6, 10. [Google Scholar] [CrossRef]
- Rose, J.; Ivantysynova, M. A Study of Pump Control Systems for Smart Pumps. In Proceedings of the 52nd National Conference on Fluid Power, Las Vegas, NV, USA, 23–25 March 2011; pp. 683–692. [Google Scholar]
- Kazmeier, B. Energieverbrauchsoptimierte Regelung Eines Elektrohydraulischen Linearantriebs Kleiner Leistung Mit Drehzahlgeregeltem Elektromotor Und Verstellpumpe. Ph.D. Thesis, TU Hamburg-Harburg, Hamburg, Germany, 1998. (In German). [Google Scholar]
- Quan, Z.; Quan, L.; Zhang, J. Review of energy efficient direct pump controlled cylinder electro-hydraulic technology. Renew. Sustain. Energy Rev. 2014, 35, 336–346. [Google Scholar] [CrossRef]
- Parker Hannifin. Compact EHA—Electro-Hydraulic Actuators for high power density applications. 2011. Available online: http://www.parker.com/Literature/Hydraulic%20Pump%20Division/Oildyne%20EHA/Compact-EHA-Catalog-HY22-3101E-7-13.pdf (accessed on 3 April 2019).
- Bosch Rexroth AG. SHA Servo-Hydraulic Actuator. 2017. Available online: https://dc-corp.resource.bosch.com/media/general_use/products/industrial_hydraulics_1/systems_1/20170915_Kundeninformation_SHA_EN.pdf (accessed on 3 April 2019).
- Servi Group. Servi Hybrid Drive. Linear Actuator. 2017. Available online: https://www.servi.no/media/documents/Hybrid_Cylinder_1705-1_NO.pdf (accessed on 3 April 2019).
- Costa, G.K.; Sepehri, N. Four-Quadrant Analysis and System Design for Single-Rod Hydrostatic Actuators. J. Dyn. Syst. Meas. Control 2018, 141. [Google Scholar] [CrossRef]
- Neubert, T. Untersuchungen von drehveränderbaren Pumpen. Ph.D. Thesis, TU Dresden, Dresden, Germany, 2002. (In German). [Google Scholar]
- Willkomm, J.; Wahler, M. Potentials of Speed and Displacement Variable Pumps in Hydraulic Applications. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016; pp. 379–391. [Google Scholar]
- Willkomm, J.; Wahler, M.; Weber, J. Quadratic Programming to Optimize Energy Efficiency of Speed- and Displacement-Variable Pumps. In Proceedings of the 8th FPNI Ph.D Symposium on Fluid Power, Lappeenranta, Finland, 11–13 June 2014. [Google Scholar] [CrossRef]
- Rühlicke, I. Elektrohydraulische Antriebssysteme mit Drehzahlveränderbarer Pumpe. Ph.D. Thesis, TU Dresden, Dresden, Germany, 1997. (In German). [Google Scholar]
- Hewett, A.J. Hydraulic Circuit Flow Control. U.S. Patent 5,329,767, 19 July 1994. [Google Scholar]
- Williamson, C. Power Management for Multi-Actuator Mobile Machines with Displacement Controlled Hydraulic Actuators. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2010. [Google Scholar]
- Çalışkan, H.; Balkan, T.; Platin, B.E. A Complete Analysis for Pump Controlled Single Rod Actuators. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016; pp. 119–132. [Google Scholar] [CrossRef]
- Çalışkan, H.; Balkan, T.; Platin, B.E. A Complete Analysis and a Novel Solution for Instability in Pump Controlled Asymmetric Actuators. J. Dyn. Syst. Meas. Control 2015, 137. [Google Scholar] [CrossRef]
- Wang, L.; Book, W.J.; Huggins, J.D. A Hydraulic Circuit for Single Rod Cylinders. J. Dyn. Syst. Meas. Control 2012, 134, 011019. [Google Scholar] [CrossRef]
- Wang, L.; Book, W.J. Using Leakage to Stabilize a Hydraulic Circuit for Pump Controlled Actuators. J. Dyn. Syst. Meas. Control 2013, 135, 061007. [Google Scholar] [CrossRef]
- Imam, A.; Rafiq, M.; Jalayeri, E.; Sepehri, N. A Pump-Controlled Circuit for Single-Rod Cylinders that Incorporates Limited Throttling Compensating Valves. Actuators 2018, 7, 13. [Google Scholar] [CrossRef]
- Altare, G.; Vacca, A. A Design Solution for Efficient and Compact Electro-hydraulic Actuators. Procedia Eng. 2015, 106, 8–16. [Google Scholar] [CrossRef] [Green Version]
- Altare, G.; Vacca, A.; Richter, C. A Novel Pump Design for an Efficient and Compact Electro- Hydraulic Actuator. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2014. [Google Scholar] [CrossRef]
- Bosch Rexroth AG. Advantages of Electrification and Digitalization Technology For Hydraulics. 2018. Available online: https://www.boschrexroth.com/en/xc/products/product-groups/industrial-hydraulics/the-fitness-program-for-hydraulics (accessed on 3 April 2019).
- Olson, M.; Praazak, J. Electro-Hydraulic Actuator. U.S. Patent 2011/0289912 A1, 2011. Available online: https://patentimages.storage.googleapis.com/11/87/9d/336151787d8fa5/US20110289912A1.pdf (accessed on 3 April 2019).
- Jalayeri, E.; Imam, A.; Tomas, Z.; Sepehri, N. A throttle-less single-rod hydraulic cylinder positioning system: Design and experimental evaluation. Adv. Mech. Eng. 2015, 7. [Google Scholar] [CrossRef] [Green Version]
- Quan, L.; Yang, Y.; Hou, X. Simulation and experimental research on the axial piston pump with series three-windows in valve plate. In Proceedings of the 2011 International Conference on Fluid Power and Mechatronics, Beijing, China, 17–20 August 2011; pp. 71–76. [Google Scholar] [CrossRef]
- Zhang, X.; Quan, L.; Yang, Y.; Wang, C.; Yao, L. Output characteristics of a series three-port axial piston pump. Chin. J. Mech. Eng. 2012, 25, 498–505. [Google Scholar] [CrossRef]
- Huang, J.; Quan, L.; Zhang, X. Development of a dual-acting axial piston pump for displacement controlled system. Proc. Inst. Mech. Eng. Part B 2013, 228, 606–616. [Google Scholar] [CrossRef]
- Huang, J.; Zhao, H.; Quan, L.; Zhang, X. Development of an asymmetric axial piston pump for displacement-controlled system. Proc. Inst. Mech. Eng. Part C 2013, 228, 1418–1430. [Google Scholar] [CrossRef]
- Kenyon, R.L.; Scanderberg, D.; Wilkerson, W.D. Electro-Hydraulic Actuator. European Patent 90304554.0, 26 April 1990. [Google Scholar]
- Quan, L.; Ge, L.; Wang, C.; Li, B.; Zhao, B.; Lu, Z. Performance of Speed Variable Asymmetric Pump Controlled Asymmetric Hydraulic Cylinder. In Proceedings of the 10th JFPS International Symposium on Fluid Power, Fukuoka, Japan, 24–27 October 2017; pp. 1–10. [Google Scholar]
- Pedersen, H.C.; Schmidt, L.; Andersen, T.O.; Brask, M.H. Investigation of New Servo Drive Concept Utilizing Two Fixed Displacement Units. JFPS Int. J. Fluid Power Syst. 2014, 8, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Minav, T.; Bonato, C.; Sainio, P.; Pietola, M. Direct Driven Hydraulic Drive. In Proceedings of the 9th International Fluid Power Conference, Aachen, Germany, 24–26 March 2014; pp. 7–11. [Google Scholar]
- Järf, A.; Minav, T.; Pietola, M. Nonsymmetrical Flow Compensation Using Hydraulic Accumulator. In Proceedings of the 9th FPNI Ph.D. Symposium on Fluid Power, Florianopolis, Brazil, 26–28 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Minav, T.; Panu, S.; Matti, P. Direct-Driven Hydraulic Drive Without Conventional Oil Tank. In Proceedings of the ASME/BATH 2014 Symposium on Fluid Power and Motion Control, Bath, UK, 10–12 September 2014; p. V001T01A022. [Google Scholar] [CrossRef]
- Filatov, D.; Minav, T.; Heikkinen, J.E. Adaptive Control for Direct-Driven Hydraulic Drive. In Proceedings of the 11th International Fluid Power Conference, Aachen, Germany, 19–21 March 2018. [Google Scholar]
- Niraula, A.; Zhang, S.; Minav, T.; Pietola, M. Effect of Zonal Hydraulics on Energy Consumption and Boom Structure of a Micro-Excavator. Energies 2018, 11, 2088. [Google Scholar] [CrossRef]
- Zhang, S.; Minav, T.; Pietola, M. Decentralized Hydraulics for Micro Excavator. In Proceedings of the 15th Scandinavian International Conference on Fluid Power, Linköping, Sweden, 7–9 June 2017; pp. 187–195. [Google Scholar] [CrossRef]
- Schmidt, L.; Roemer, D.B.; Pedersen, H.C.; Andersen, T.O. Speed-Variable Switched Differential Pump System for Direct Operation of Hydraulic Cylinders. In Proceedings of the ASME/BATH 2015 Symposium on Fluid Power and Motion Control, Chicago, IL, USA, 14–16 October 2015. [Google Scholar]
- Schmidt, L.; Groenkjaer, M.; Pedersen, H.C.; Andersen, T.O. Position Control of an Over-Actuated Direct Hydraulic Cylinder Drive. Control Eng. Pract. 2017, 64, 1–14. [Google Scholar] [CrossRef]
- Ketelsen, S.; Schmidt, L.; Donkov, V.H.; Andersen, T.O. Energy Saving Potential in Knuckle Boom Cranes using a Novel Pump Controlled Cylinder Drive. Model. Identif. Control 2018, 39, 73–89. [Google Scholar] [CrossRef]
- Cleasby, K.; Plummer, A. A novel high efficiency electrohydrostatic flight simulator motion system. In Proceedings of the ASME/BATH 2008 Symposium on Fluid Power and Motion Control, Bath, UK, September 2008; pp. 437–449. [Google Scholar]
- Costa, G.K.; Sepehri, N. Hydrostatic Transmissions and Actuators: Operation, Modelling and Applications; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar]
- Neubert, T. Elektro-hydraulische antriebssysteme mit drehzahlveränderbaren Pumpen. In Proceedings of the 1. Internationales Fluidtechnisches Kolloquium, Aachen, Germany, 17–18 March 1998; pp. 287–300. (In German). [Google Scholar]
- Helduser, S. Electric-hydrostatic drive—An innovative energy-saving power and motion control system. Proc. Inst. Mech. Eng. Part I 1999, 213, 427–437. [Google Scholar] [CrossRef]
- Helduser, S. Electric-Hydrostatic Drive Systems and their Application in Injection Moulding Machines. In Proceedings of the Forth JHPS International Symposium on Fluid Power, Tokyo, Japan, November 1999; pp. 261–266. [Google Scholar]
- Cho, S.H.; Helduser, S. Robust motion control of a clamp-cylinder for energy-saving injection moulding machines. J. Mech. Sci. Technol. 2008, 22, 2445–2453. [Google Scholar] [CrossRef]
- Long, Q.; Neubert, T.; Helduser, S. Principle to Closed Loop Control Differential Cylinder with Double Speed Variable Pumps and Single Loop Control Signal. Chin. J. Mech. Eng. 2004, 17, 85–88. [Google Scholar]
- Rahmfeld, R. Development and Control of Energy Saving Hydraulic Servo Drives for Mobile Systems. Ph.D. Thesis, TU Hamburg-Harburg, Hamburg, Germany, 2002. [Google Scholar]
- Yao, J.; Wang, P.; Cao, X.M.; Wang, Z. Independent volume-in and volume-out control of an open circuit pump-controlled asymmetric cylinder system. J. Zhejiang Univ. Sci. A 2018, 19, 203–210. [Google Scholar] [CrossRef]
- Lodewyks, J. Der Differentialzylinder im Geschlossenen Hydrostatischen Kreislauf. Ph.D. Thesis, RWTH Aachen, Aachen, Germany, 1994. (In German). [Google Scholar]
- Feuser, A.; Dantlgraber, J.; Spath, D.; Wilke, O. Servopumpeantriebe für Differentialzylinder. Ölhydraul. Pneum. 1995, 39, 540–544. (In German) [Google Scholar]
- Dantlgraber, J. Hydraulic System for a Differential Piston Type Cylinder. U.S. Patent 5179836, 19 January 1993. [Google Scholar]
- Klug, D. Hydraulische Antriebe mit Drehzahlgeregeltem Elektromotor. Ph.D. Thesis, TU Chemnitz, Chemnitz, Germany, 2000. (In German). [Google Scholar]
- Rahmfeld, R.; Ivantysynova, M. Energy Saving hydraulic actuators for mobile machines. In Proceedings of the 1st Bratislavian Fluid Power Conference, Častá-Píla, Slovakia, 2–3 June 1998. [Google Scholar]
- Ivantysynova, M. Displacement Controlled Linear and Rotary Drives for Mobile Machines with Automatic Motion Control. SAE Trans. Sect. 2 2000, 109, 125–132. [Google Scholar]
- Ivantysynova, M. Die Schrähscheibenmaschine-eine Verdrängereinheit mit großem Entwicklungspotential. In Proceedings of the 1. Internationales Fluidtechnisches Kolloquium, Aachen, Germany, 17–18 March 1998. (In German). [Google Scholar]
- Rahmfeld, R.; Ivantysynova, M. Displacement controlled linear actuator with differential cylinder—A way to save primary energy in mobile machines. In Proceedings of the 5th International Conference on Fluid Power Transmission and Control, Hangzhou, China, 4–5 April 2001. [Google Scholar]
- Schneider, M.; Koch, O.; Weber, J.; Bach, M.; Jacobs, G. Green Wheel Loader—Development of an energy efficient drive and control system. In Proceedings of the 9th International Fluid Power Conference, Aachen, Germany, 24–26 March 2014. [Google Scholar]
- Rahmfeld, R.; Ivantysynova, M.; Weber, J. Displacement Controlled Wheel Loader—A simple and clever Solution. In Proceedings of the 4th International Fluid Power Conference, Dresden, Germany, 23–24 March 2004; pp. 183–196. [Google Scholar]
- Schneider, M.; Koch, O.; Weber, J. Green Wheel Loader—Improving fuel economy through energy efficient drive and control concepts. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016. [Google Scholar]
- Williamson, C.; Zimmerman, J.; Ivantysynova, M. Efficiency study of an excavator hydraulic system based on displacement-controlled actuators. In Proceedings of the ASME/BATH 2008 Symposium on Fluid Power and Motion Control, Bath, UK, 10–12 September 2008; pp. 291–307. [Google Scholar]
- Zimmerman, J.D.; Ivantysynova, M. Reduction of Engine and Cooling Power by Displacement Control. In Proceedings of the 6th FPNI PhD Symposium, West Lafayette, IN, USA, 15–19 June 2010; pp. 339–352. [Google Scholar]
- Zimmerman, J.; Busquets, E.; Ivantysynova, M. 40% fuel savings by displacement control leads to lower working temperatures—A simulation study and measurements. In Proceedings of the 52nd National Conference on Fluid Power, Las Vegas, NV, USA, 23–25 March 2011; pp. 693–702. [Google Scholar]
- Zimmerman, J. Toward Optimal Multi-Actuator Displacement Controlled Mobile Hydraulic Systems. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2012. [Google Scholar]
- Busquets, E.; Ivantysynova, M. The World’s First Displacement-Controlled Excavator Prototype with Pump Switching—A Study of the Architecture and Control. In Proceedings of the 9th JFPS International Symposium on Fluid Power, Matsue, Japan, 28–31 October 2014. [Google Scholar]
- Busquets, E.; Ivantysynova, M. A Multi-Actuator Displacement-Controlled System with Pump Switching—A Study of the Architecture and Actuator-Level Control. JFPS Int. J. Fluid Power Syst. 2015, 8, 66–75. [Google Scholar] [CrossRef]
- Williamson, C.; Ivantysynova, M. Pump Mode Prediction for Four-Quadrant Velocity Control of Valveless Hydraulic Actuators. In Proceedings of the 7th JFPS International Symposium on Fluid Power, Toyama, Japan, 15–18 September 2008; Volume 2008, pp. 323–328. [Google Scholar] [CrossRef]
- Williamson, C.; Lee, S.; Ivantysynova, M. Active Vibration Damping for an Off-Road Vehicle with Displacement Controlled Actuators. Int. J. Fluid Power 2009, 10, 5–16. [Google Scholar] [CrossRef]
- Williamson, C.; Ivantysynova, M. Stability and Motion Control of Inertial Loads with Displacement Controlled Hydraulic Actuators. In Proceedings of the 6th FPNI PhD Symposium, West Lafayette, IN, USA, 15–19 June 2010; pp. 499–514. [Google Scholar]
- Busquets, E. An Investigation of the Cooling Power Requirements for Displacement-Controlled Multi-Actuator Machines. Master’s Thesis, Purdue University, West Lafayette, IN, USA, 2013. [Google Scholar]
- Busquets, E.; Ivantysynova, M. Temperature Prediction of Displacement Controlled Multi-Actuator Machines. Int. J. Fluid Power 2013, 14, 25–36. [Google Scholar] [CrossRef]
- Lodewyks, J. Differenzialzyliner im geschlossenen hydrostatischen Getriebe. Ölhydraul. Pneum. 1993, 37, 394–401. [Google Scholar]
- Heybroek, K. On Energy Efficient Mobile Hydraulic Systems: With Focus on Linear Actuation. Ph.D. Thesis, Linköping University, Linköping, Sweden, 2017. [Google Scholar]
- Heybroek, K.; Palmberg, J.O.; Lillemets, J.; Lugnberg, M.; Ousbäck, M. Evaluating a Pump Controlled Open Circuit Solution. In Proceedings of the 51th National Conference on Fluid Power, Las Vegas, NV, USA, 12–14 March 2008. [Google Scholar]
- Heybroek, K.; Larsson, J.; Palmberg, J.O. Open Circuit Solution for Pump Controlled Actuators. In Proceedings of the 4th FPNI PhD Symposium on Fluid Power, Sarasota, FL, USA, 13–17 June 2006; pp. 27–40. [Google Scholar]
- Heybroek, K.; Larsson, J.; Palmberg, J.O. Mode Switching and Energy Recuperation in Open-Circuit Pump Control. In Proceedings of the 10th Scandinavian International Conference on Fluid Power, Tampere, Finland, 21–23 May 2007; Volume 3, pp. 197–209. [Google Scholar]
- Ivantysyn, R.; Weber, J. Open Circuit Displacement Control in a 300 t Mining Excavator. ATZoffhighway Worldw. 2017, 10, 48–53. [Google Scholar] [CrossRef]
- Michel, S.; Schulze, T.; Weber, J. Energy-efficiency and thermo energetic behaviour of electrohydraulic compact drives. In Proceedings of the 9th International Fluid Power Conference, Aachen, Germany, 24–26 March 2014. [Google Scholar]
- Minav, T.; Sainio, P.; Pietola, M. Efficiency of Direct Driven Hydraulic Setup in Arctic Conditions. In Proceedings of the Fourteenth Scandinavian International Conference on Fluid Power, Tampere, Finland, 20–22 May 2015. [Google Scholar]
- Minav, T.; Papini, L.; Pietola, M. A Thermal Analysis of Direct Driven Hydraulics. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016; pp. 235–247. [Google Scholar]
- Karlén, N.; Minav, T.; Pietola, M. Investigation of Thermal Effects in Direct Driven Hydraulic System for Off-Road Machinery. In Proceedings of the 9th FPNI Ph.D. Symposium on Fluid Power, Florianopolis, Brazil, 26–28 October 2016. [Google Scholar] [CrossRef]
- Michel, S.; Weber, J. Prediction of the thermo-energetic behaviour of an electrohydraulic compact drive. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016; pp. 219–234. [Google Scholar]
- Minav, T.; Heikkinen, J.; Schimmel, T.; Pietola, M. Direct Driven Hydraulic Drive: Effect of Oil on Efficiency in Sub-Zero Conditions. Energies 2019, 12, 219. [Google Scholar] [CrossRef]
- Michel, S.; Weber, J. Investigation of Self-Contamination of Electrohydraulic Compact Drives. In Proceedings of the 10th JFPS International Symposium on Fluid Power, Fukuoka, Japan, 24–27 October 2017. [Google Scholar]
- Tasner, T.; Les, K.; Tic, V.; Lovrec, D. Energy efficiency of different electrohydraulic drives. In Proceedings of the 9th International Fluid Power Conference, Aachen, Germany, 24–26 March 2014. [Google Scholar]
- Bing, X.; Junhui, Z.; Ying, L.; Qun, C. Modeling and analysis of the churning losses characteristics of swash plate axial piston pump. In Proceedings of the 2015 International Conference on Fluid Power and Mechatronics, Harbin, China, 5–7 August 2015; pp. 22–26. [Google Scholar] [CrossRef]
- Parker Hannafin. P2/P3 Series Piston Pumps Variable Displacement—Catalog HY28-1559-01/PT. 2003. Available online: https://www.parker.com/literature/Hydraulic%20Pump%20Division/P2_P3-Files/P2-P3%20Series%20Piston%20Pumps%20Variable%20Displacement-HY28-1559-01-PT.pdf (accessed on 3 April 2019).
- Eaton Vickers. Axial Piston Pumps Fixed and Variable Displacement. Catalog: GB-2379B. Available online: http://www.advancedfluidsystems.com/files/Eaton-Vickers_PVB_Catalog.pdf (accessed on 3 April 2019).
- Caldwell, N.J. Digital Displacement Hydrostatic Transmission Systems. Ph.D. Thesis, University of Edinburgh, Edinburgh, Scotland, 2007. Available online: http://www.artemisip.com/wp-content/uploads/2018/05/180518-Dr-Niall-Caldwell-PhD-FINAL.pdf (accessed on 3 April 2019).
- Grønkjær, M.; Rahn, H. Control and Experimental Evaluation of Speed-variable Switched Differential Pump Concept. Master’s Thesis, Aalborg University, Aalborg, Denmark, 2015. Available online: https://projekter.aau.dk/projekter/files/213881780/Control_and_Experimental_Evaluation_of_Speed_variable_Switched_Differential_Pump_Concept_MCE4_1021.pdf (accessed on 3 April 2019).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparison between the Proposed Drive Classes | |||||
|---|---|---|---|---|---|
| Class A | Class B | Class C | Class D | Class E | |
| Energy efficiency | + | + | + | - | - |
| Ability to control drive stiffness | - - | - | + + | + + | + + |
| Ability to handle highly | - - | + | + + | + + | - |
| dynamic/switching loads | |||||
| Drive compactness and | + + | + + | + | - | - |
| flexibility | |||||
| Hydraulic circuit simplicity | + | + + | + + | - | - |
| Control simplicity | + | + | - | - | + |
| Reliability | - | - | - | + + | + + |
| Degree of scalability | - | - | + | + + | + + |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ketelsen, S.; Padovani, D.; Andersen, T.O.; Ebbesen, M.K.; Schmidt, L. Classification and Review of Pump-Controlled Differential Cylinder Drives. Energies 2019, 12, 1293. https://doi.org/10.3390/en12071293
Ketelsen S, Padovani D, Andersen TO, Ebbesen MK, Schmidt L. Classification and Review of Pump-Controlled Differential Cylinder Drives. Energies. 2019; 12(7):1293. https://doi.org/10.3390/en12071293
Chicago/Turabian StyleKetelsen, Søren, Damiano Padovani, Torben O. Andersen, Morten Kjeld Ebbesen, and Lasse Schmidt. 2019. "Classification and Review of Pump-Controlled Differential Cylinder Drives" Energies 12, no. 7: 1293. https://doi.org/10.3390/en12071293
APA StyleKetelsen, S., Padovani, D., Andersen, T. O., Ebbesen, M. K., & Schmidt, L. (2019). Classification and Review of Pump-Controlled Differential Cylinder Drives. Energies, 12(7), 1293. https://doi.org/10.3390/en12071293