An Improved Frequency Dead Zone with Feed-Forward Control for Hydropower Units: Performance Evaluation of Primary Frequency Control

Abstract
:1. Introduction
2. Method
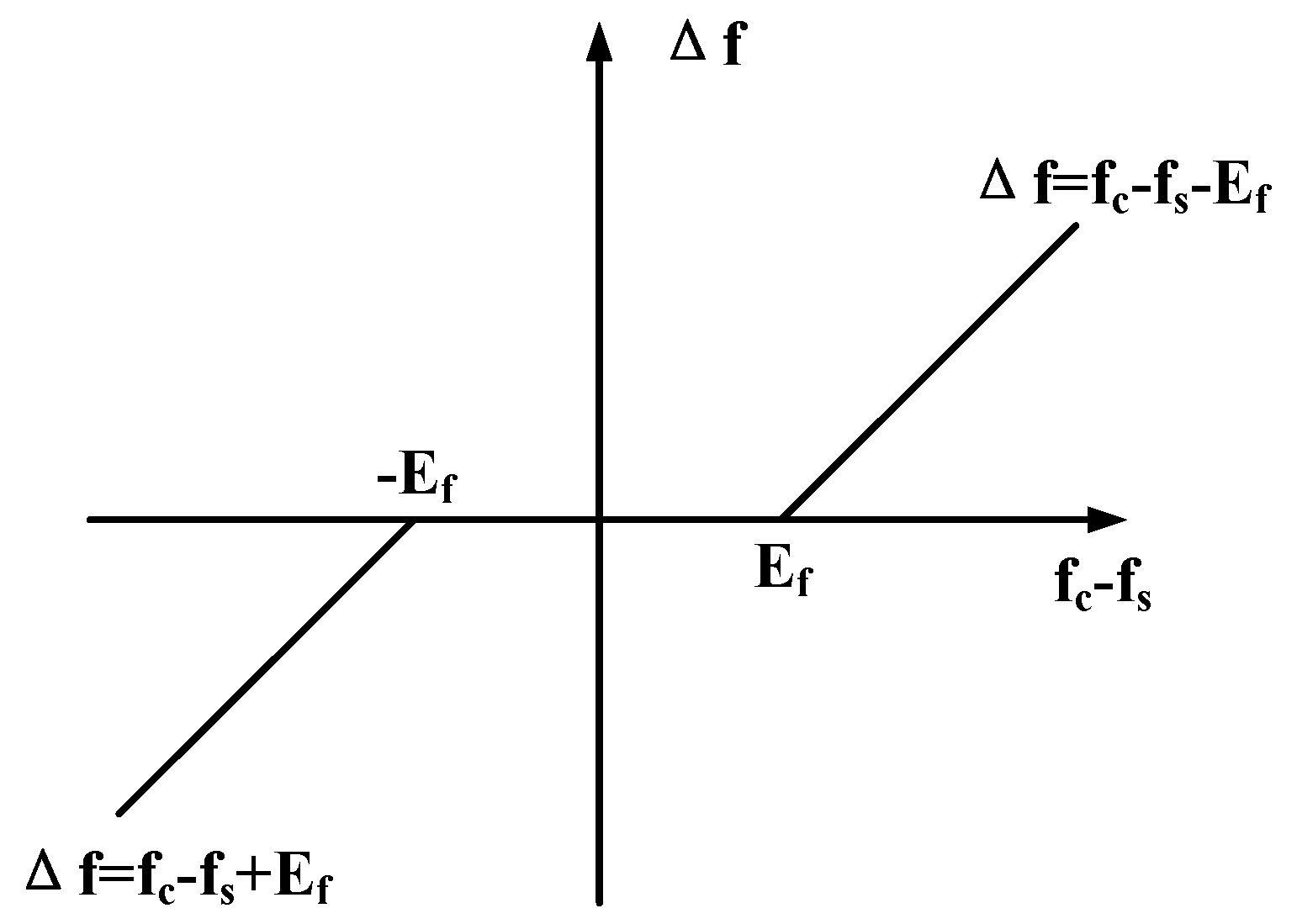
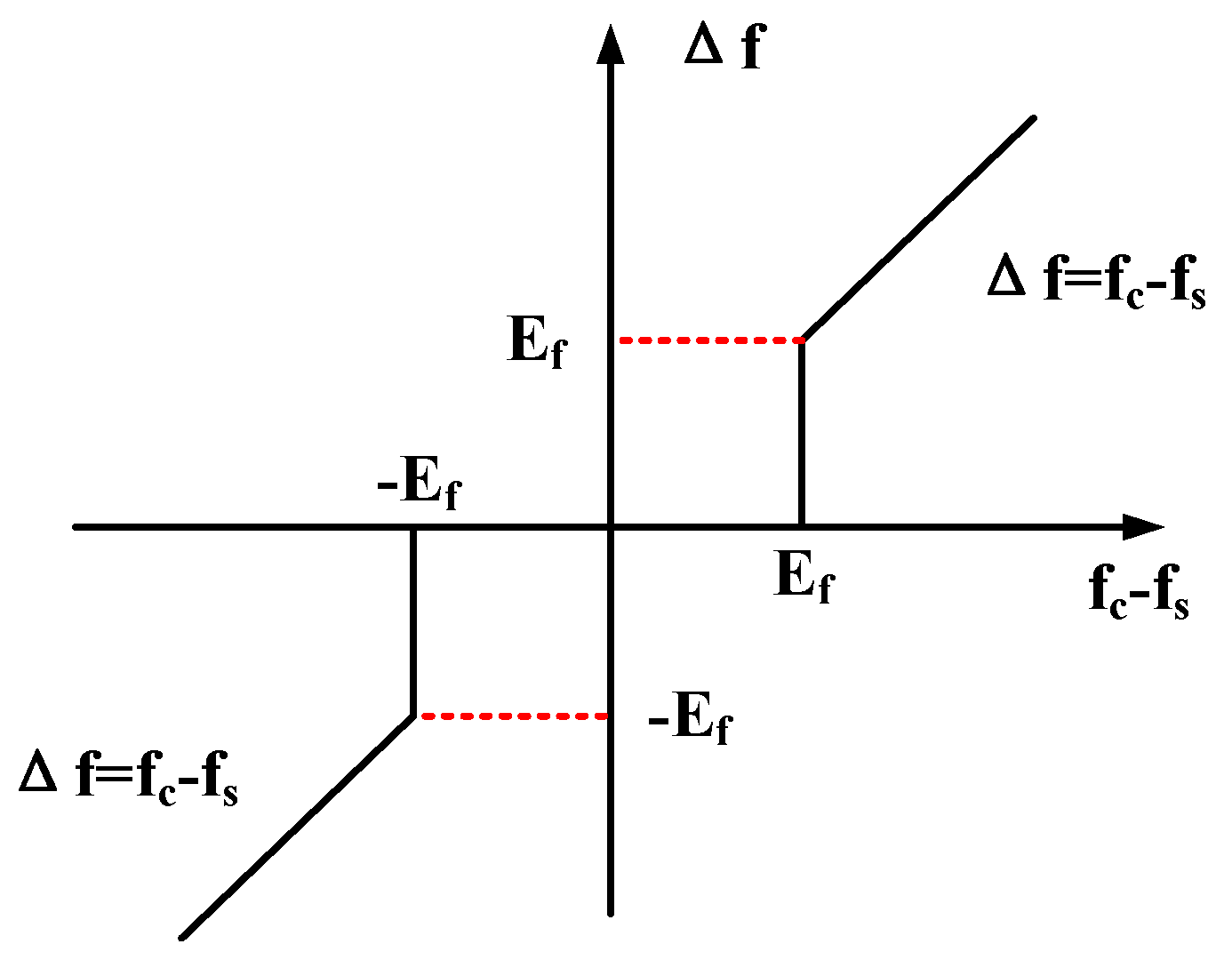
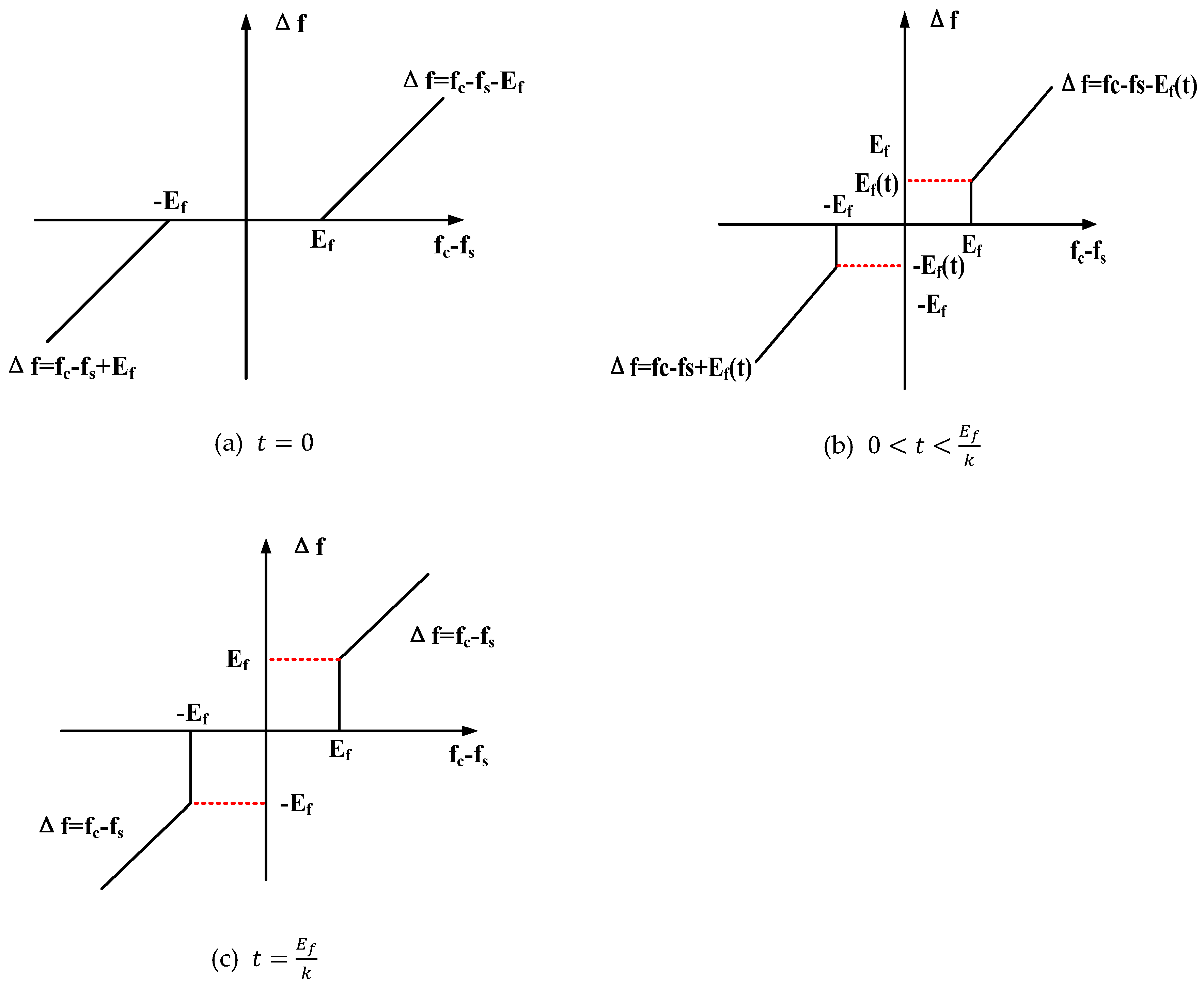
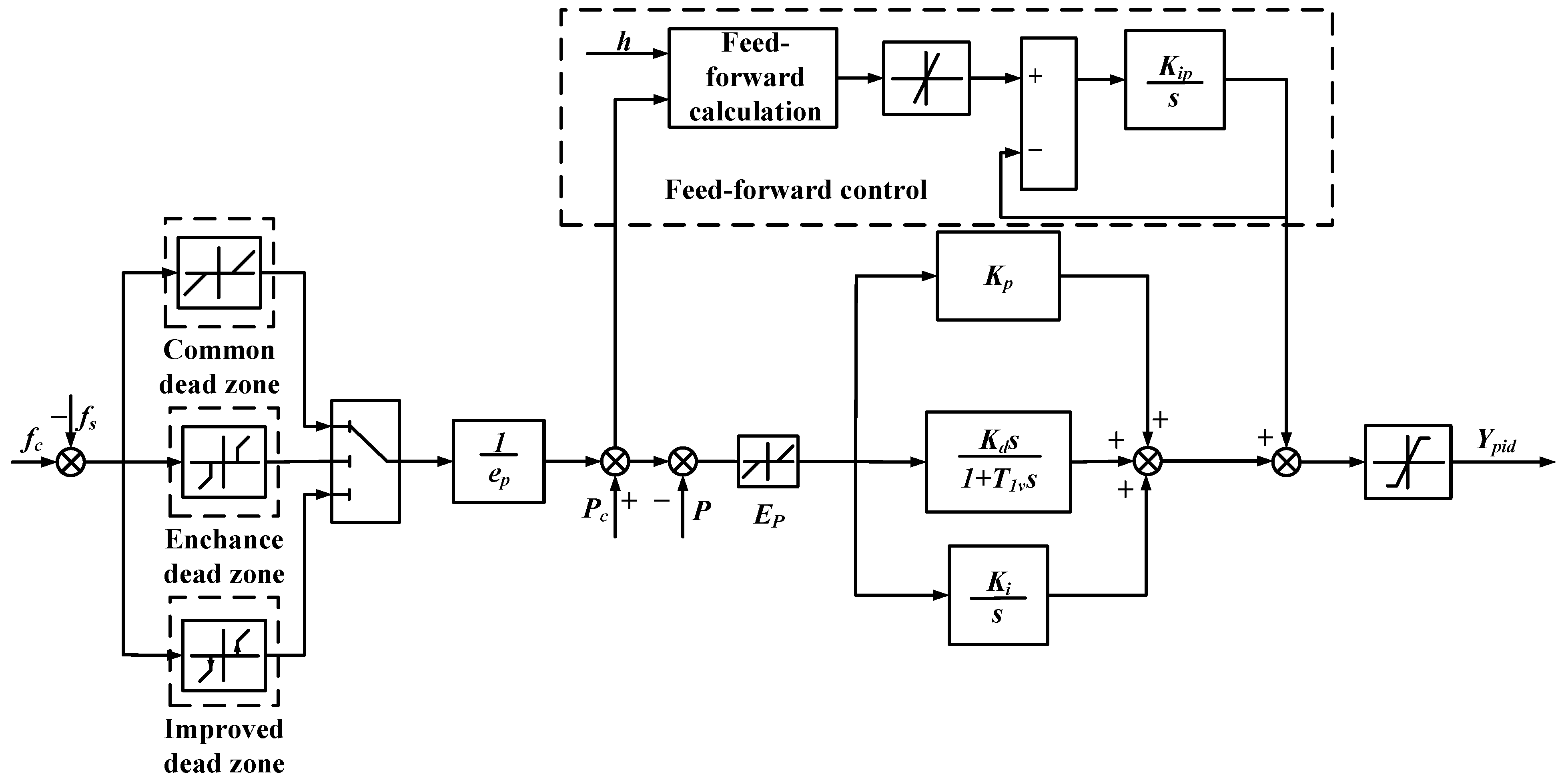
2.1. The Improved Frequency Dead Zone and Feed-Forward Control
- represents the given frequency,
- is the grid frequency,
- represents the set value of frequency dead zone [20].
- represents the given frequency,
- is the grid frequency,
- represents the set value of frequency dead zone [41].
2.2. Modeling
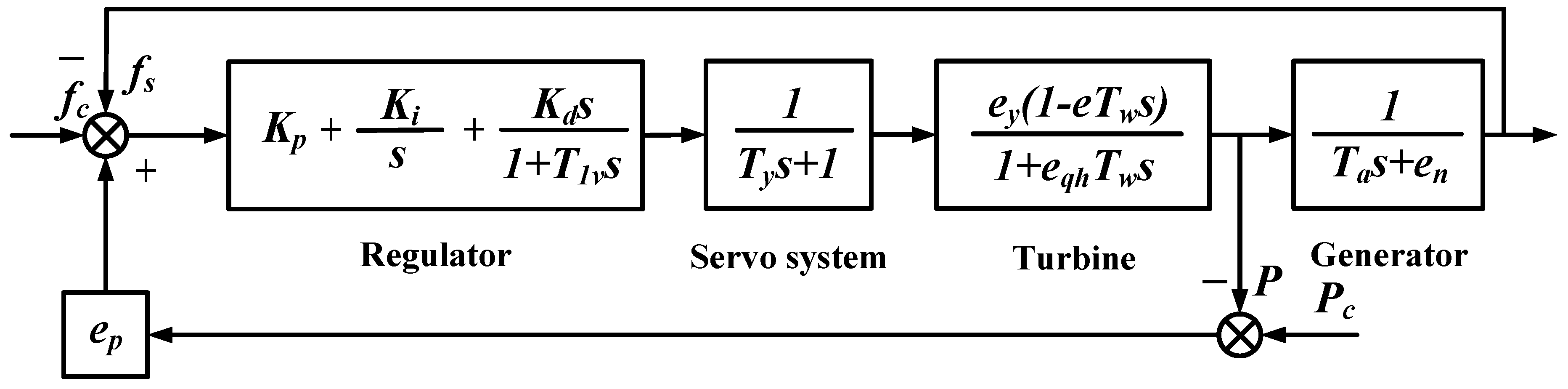
2.2.1. Basic Mathematical Model
- is the transfer function of regulator,
- is proportional gain,
- is integral gain,
- is differential gain,
- represents the differential time constant [42].
- is the transfer function of the servo system,
- is the relay response time constant [19].
- is the transfer function of turbine,
- is the transfer coefficient of turbine torque to vane opening,
- is the flow inertia time constant,
- represents the transfer coefficient of flow to water head [19],
- ; is the transfer coefficient of turbine flow to vane opening; is the transfer coefficient of turbine torque to head.
- is the turbine torque,
- is the turbine flow,
- is the guide vane opening,
- is the unit speed,
- is the water head,
- represents the blade angle.
- is the transfer function of generator,
- is the unit mechanical inertia time constant,
- is the comprehensive self-regulation coefficient of the hydro-generator set.
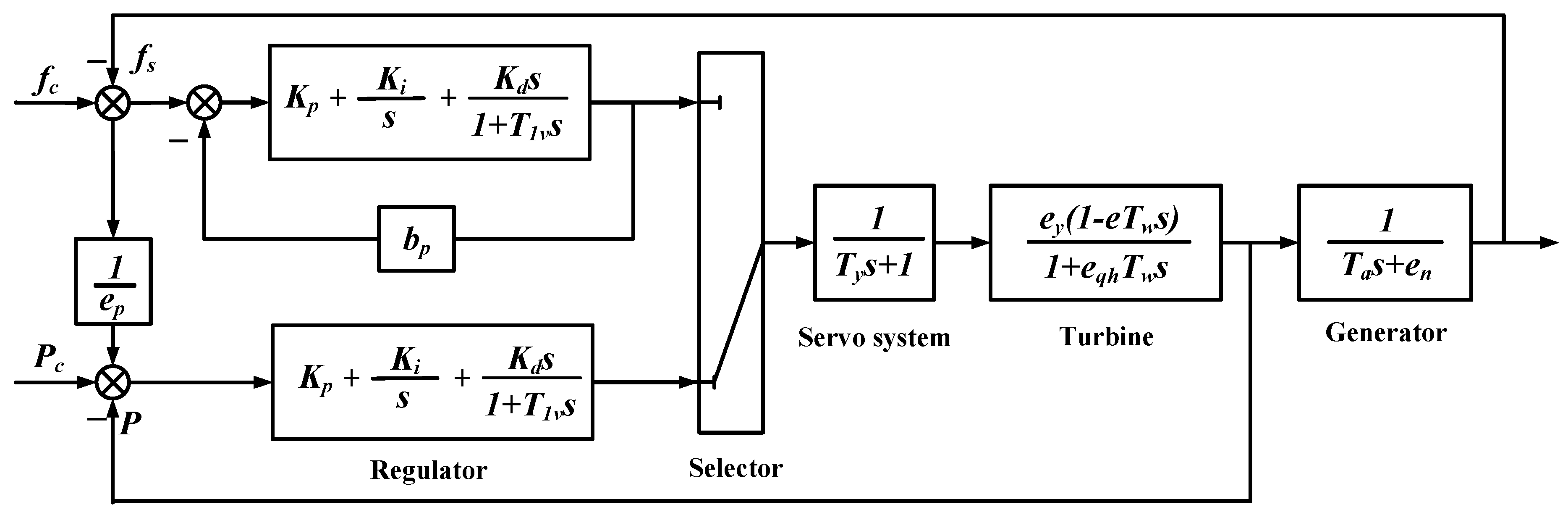
2.2.2. Regulation Mode Selection
- ,
- ,
- ,
- .
2.3. Evaluating Approach
2.3.1. IQE
- is the rated power of the unit.
- is the active power of the unit at any time t in the effective time,
- represents the active power of the unit at the initial time.
2.3.2. Regulation Rapidity
2.3.3. Wear and Tear of Hydropower Units
2.4. Study Case
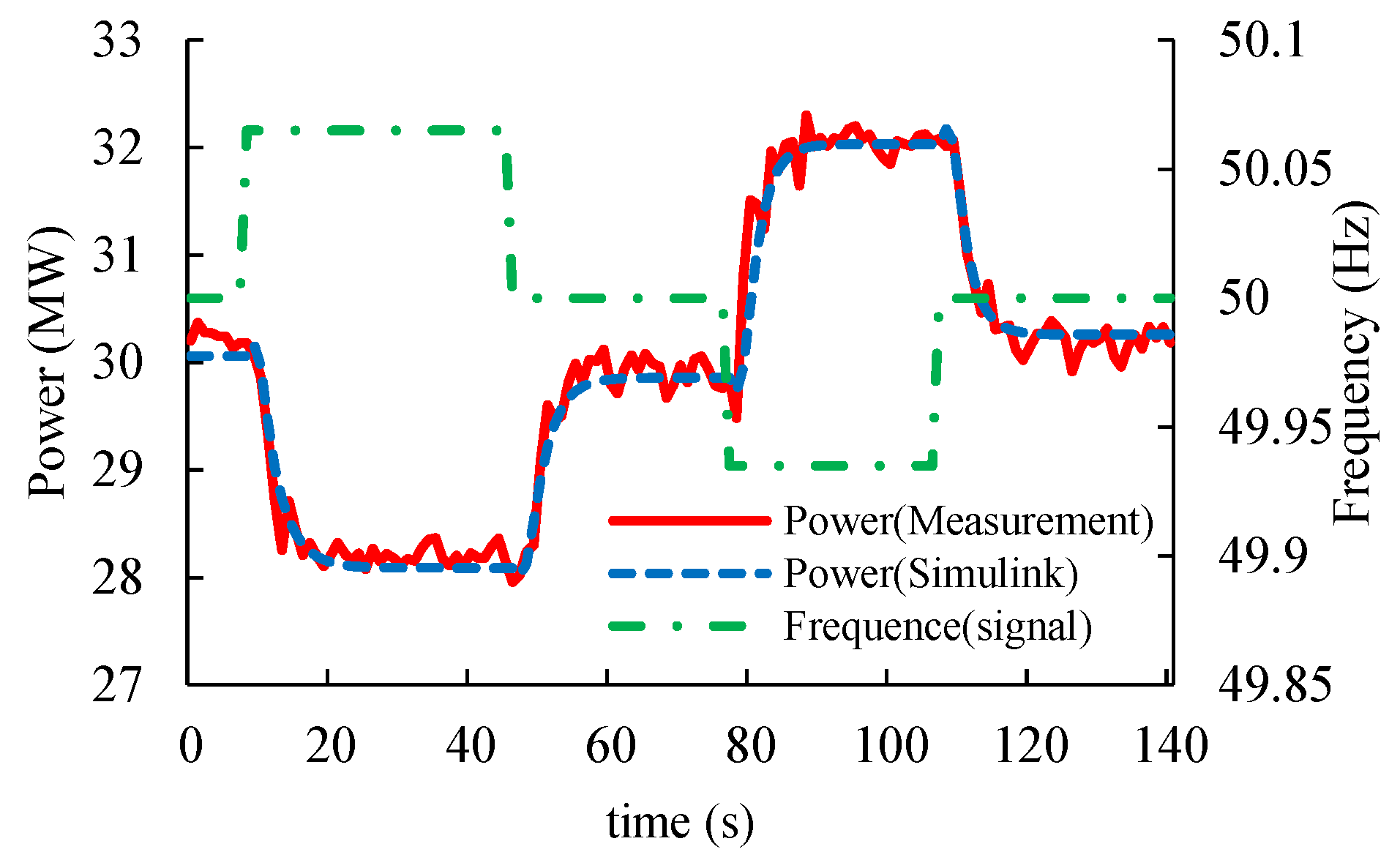
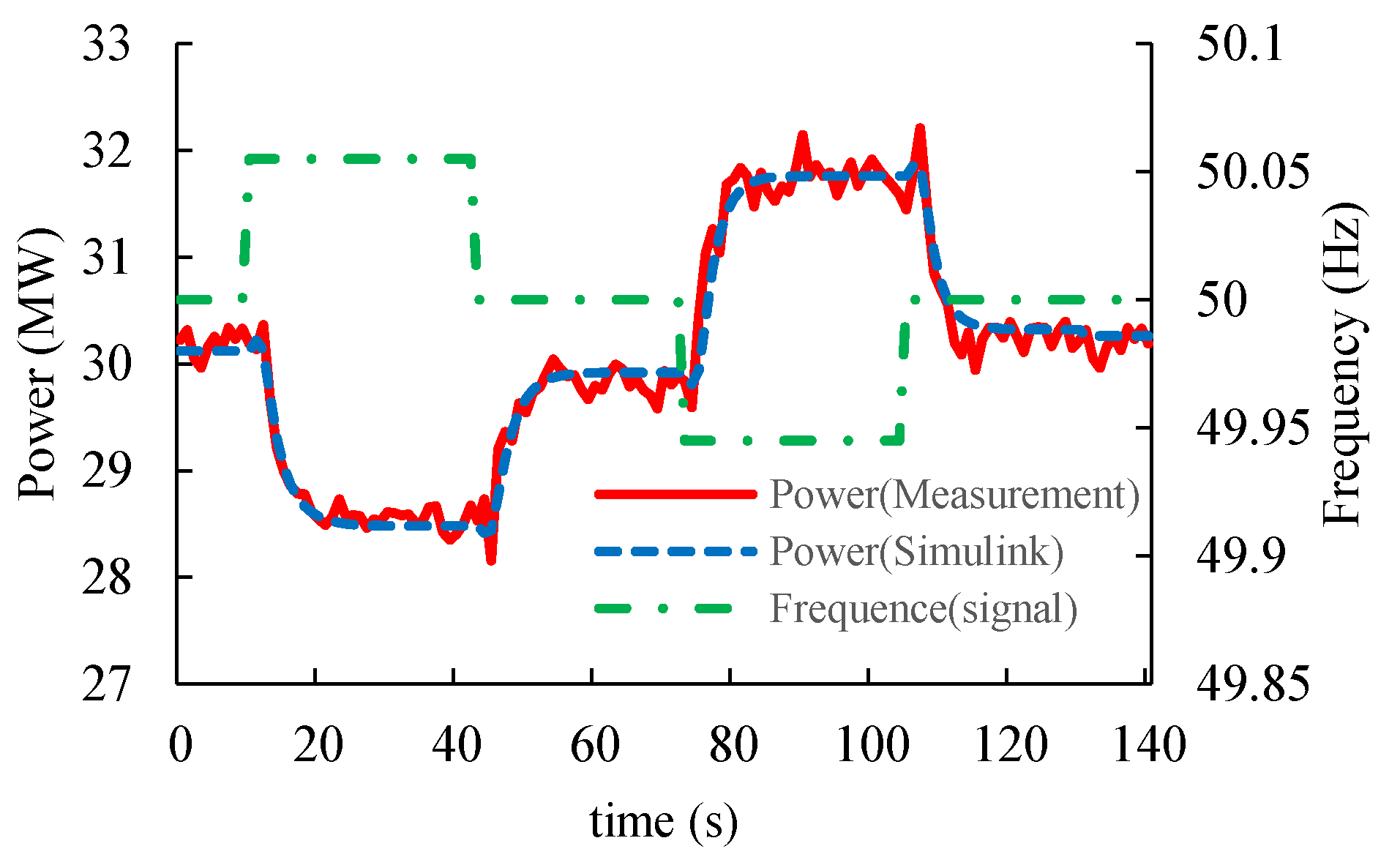
3. Model Validation
4. Results
4.1. Analysis of Dynamic Response
4.1.1. Analysis of PFC with Three Dead Zones
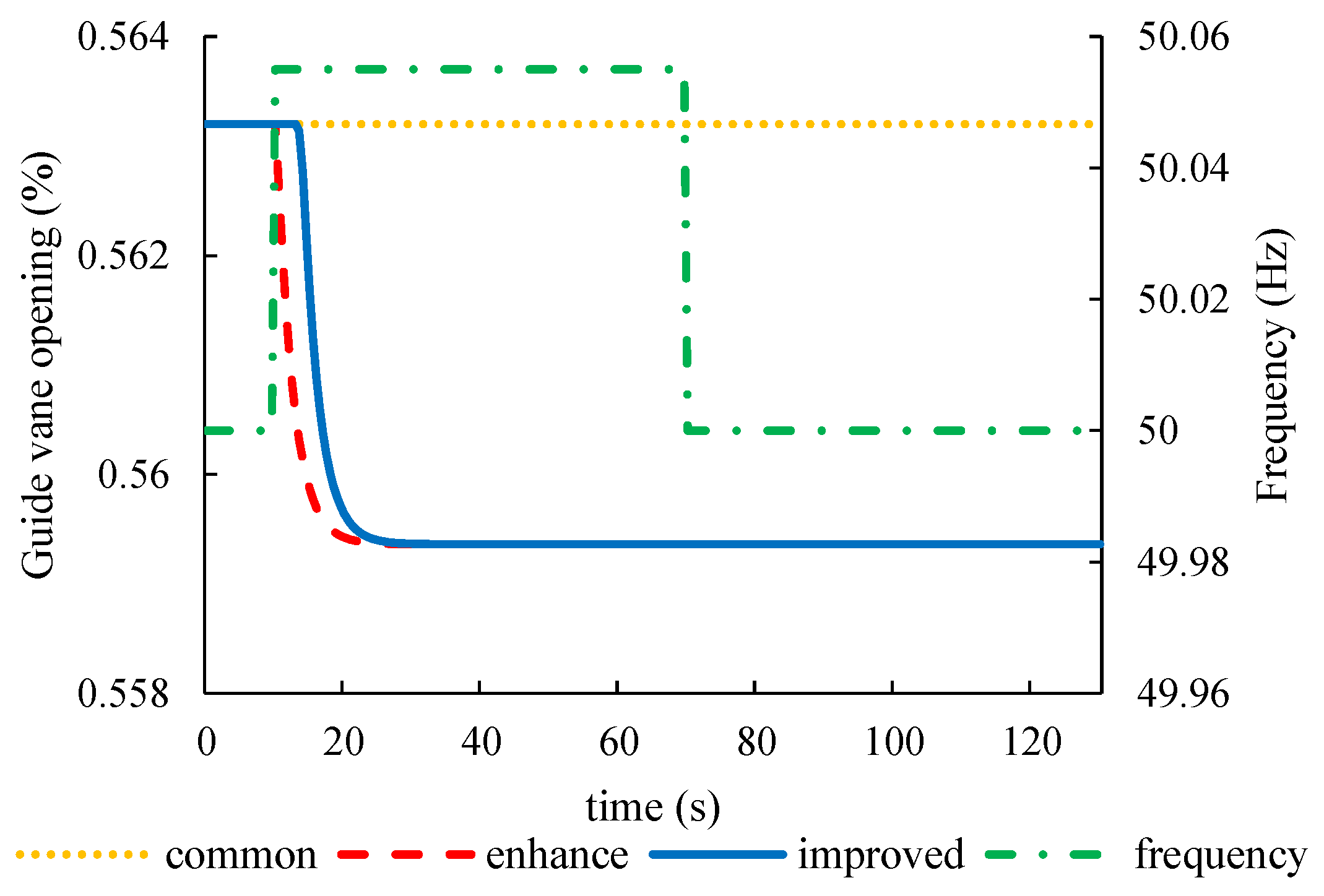
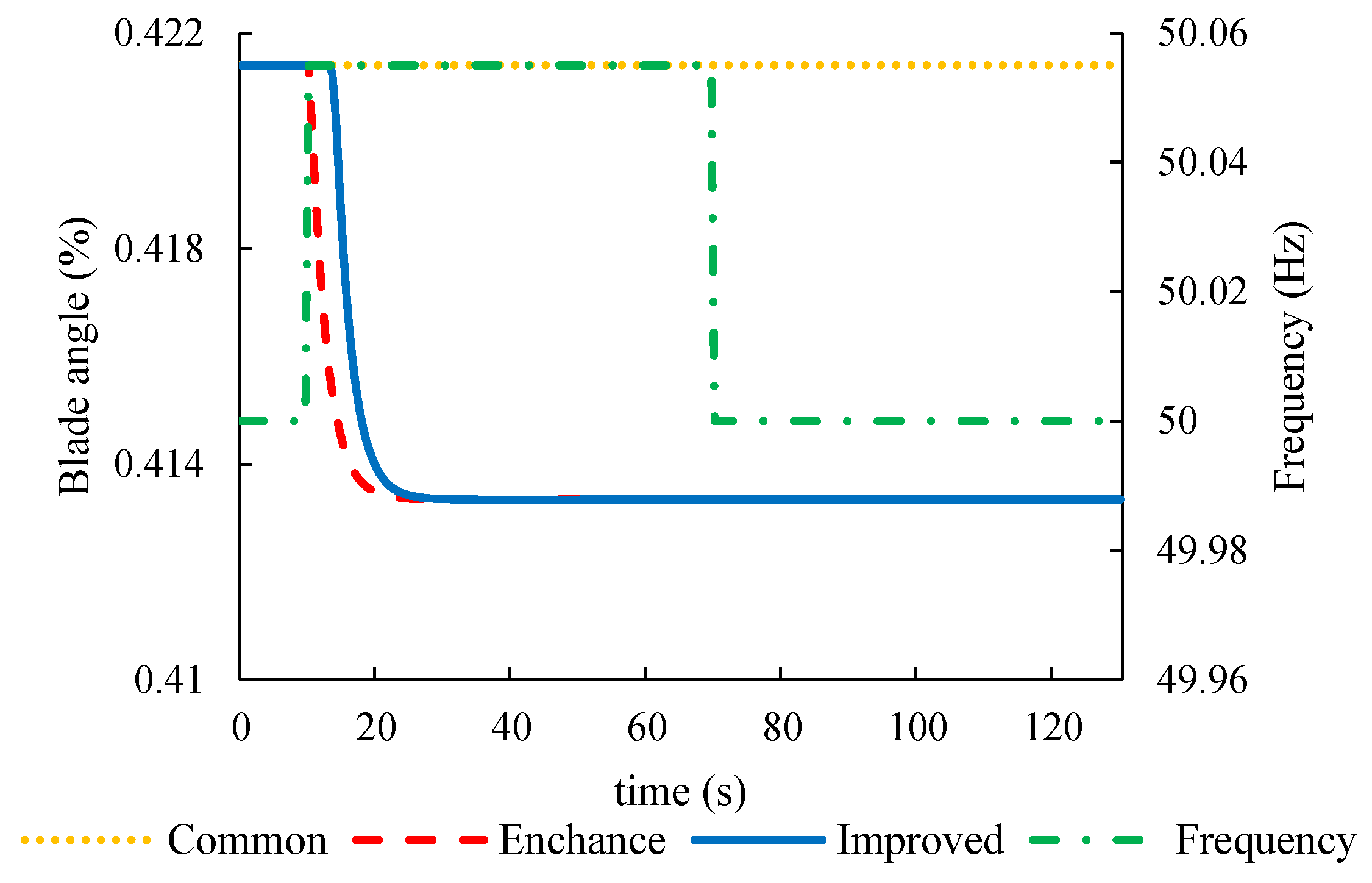
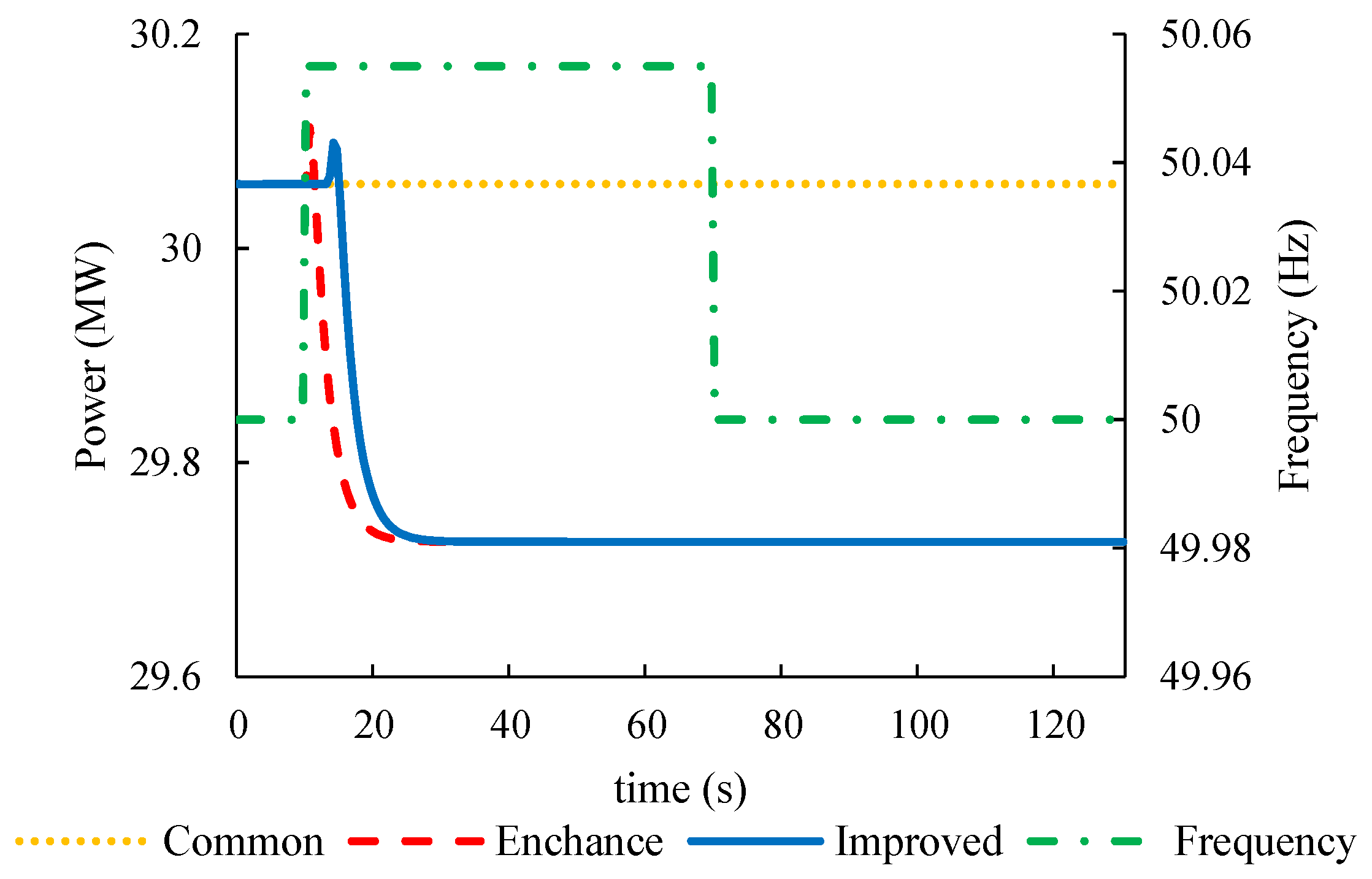
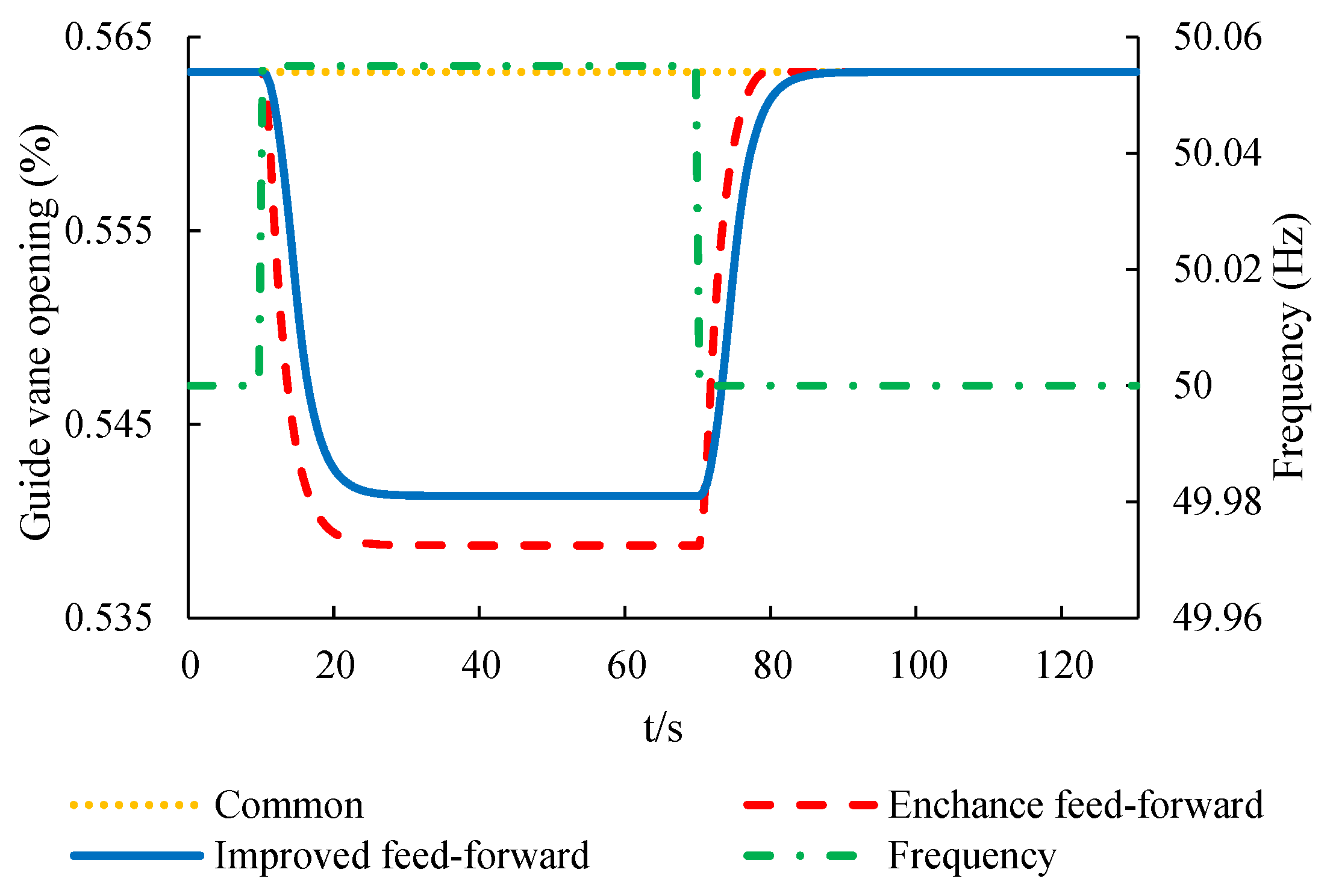
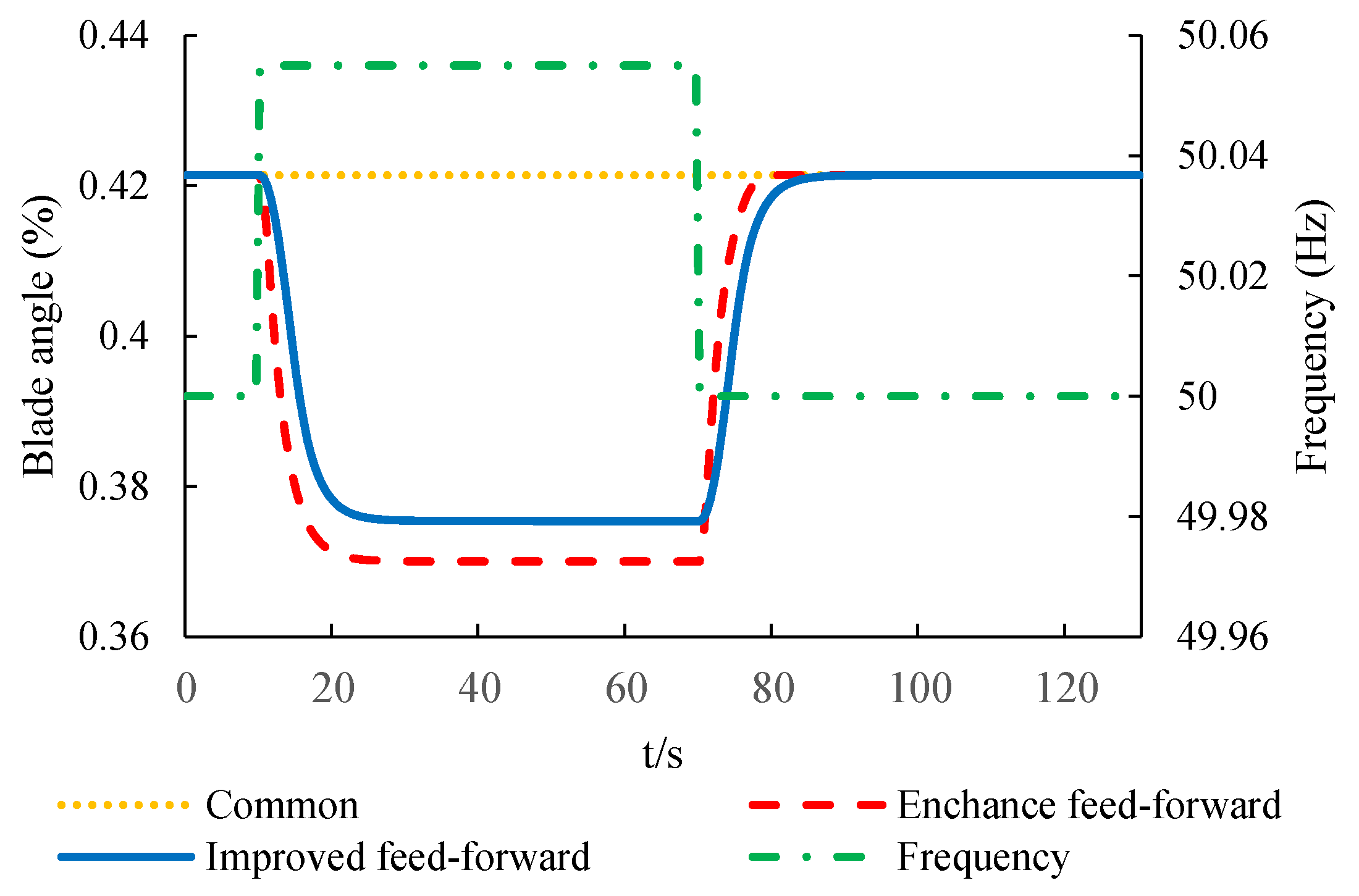
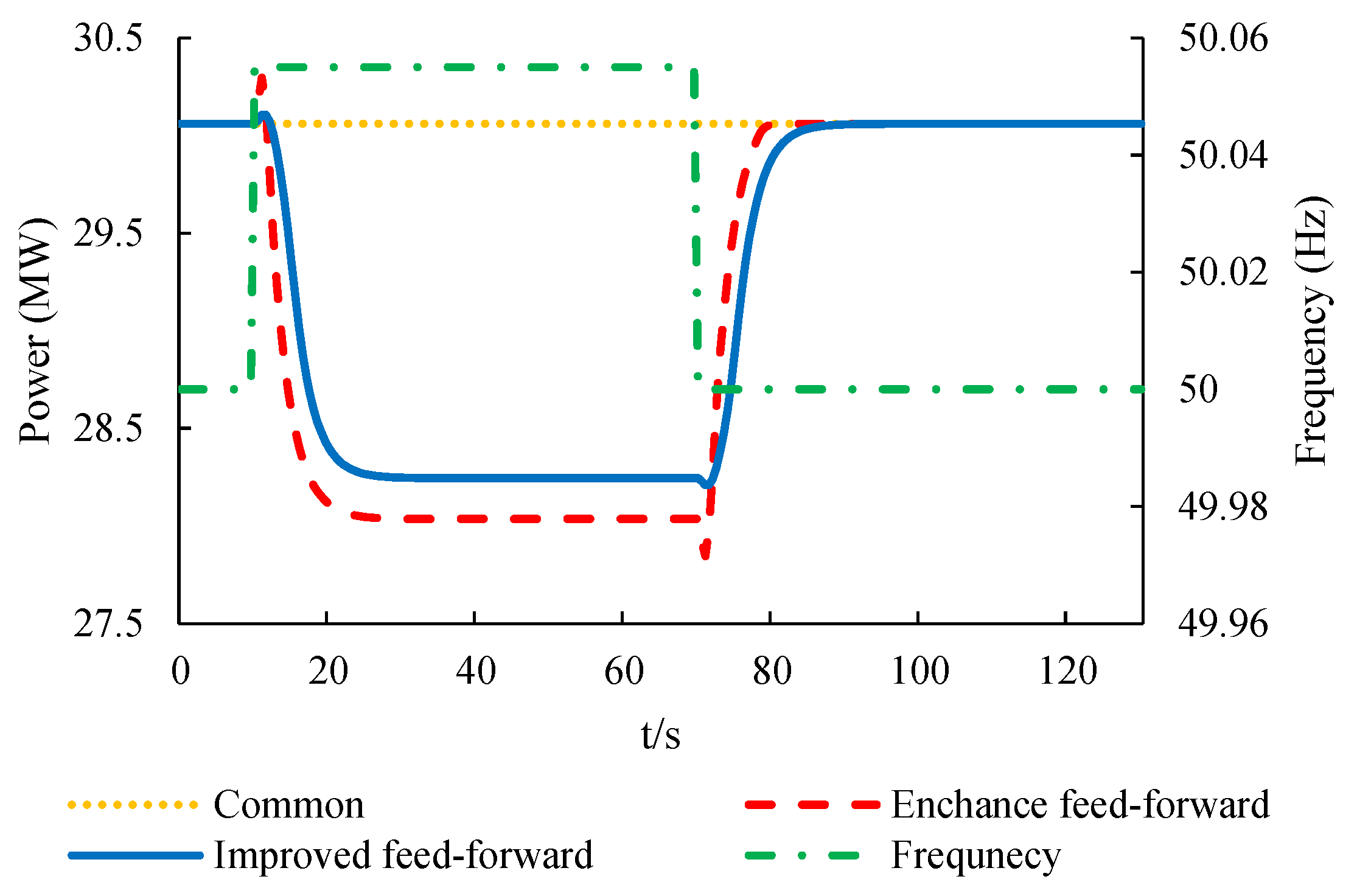
4.1.2. Analysis of PFC under Common Frequency Dead Zone, Enhanced Frequency Dead Zone with Feed-Forward Control, and Improved Frequency Dead Zone with Feed-Forward Control
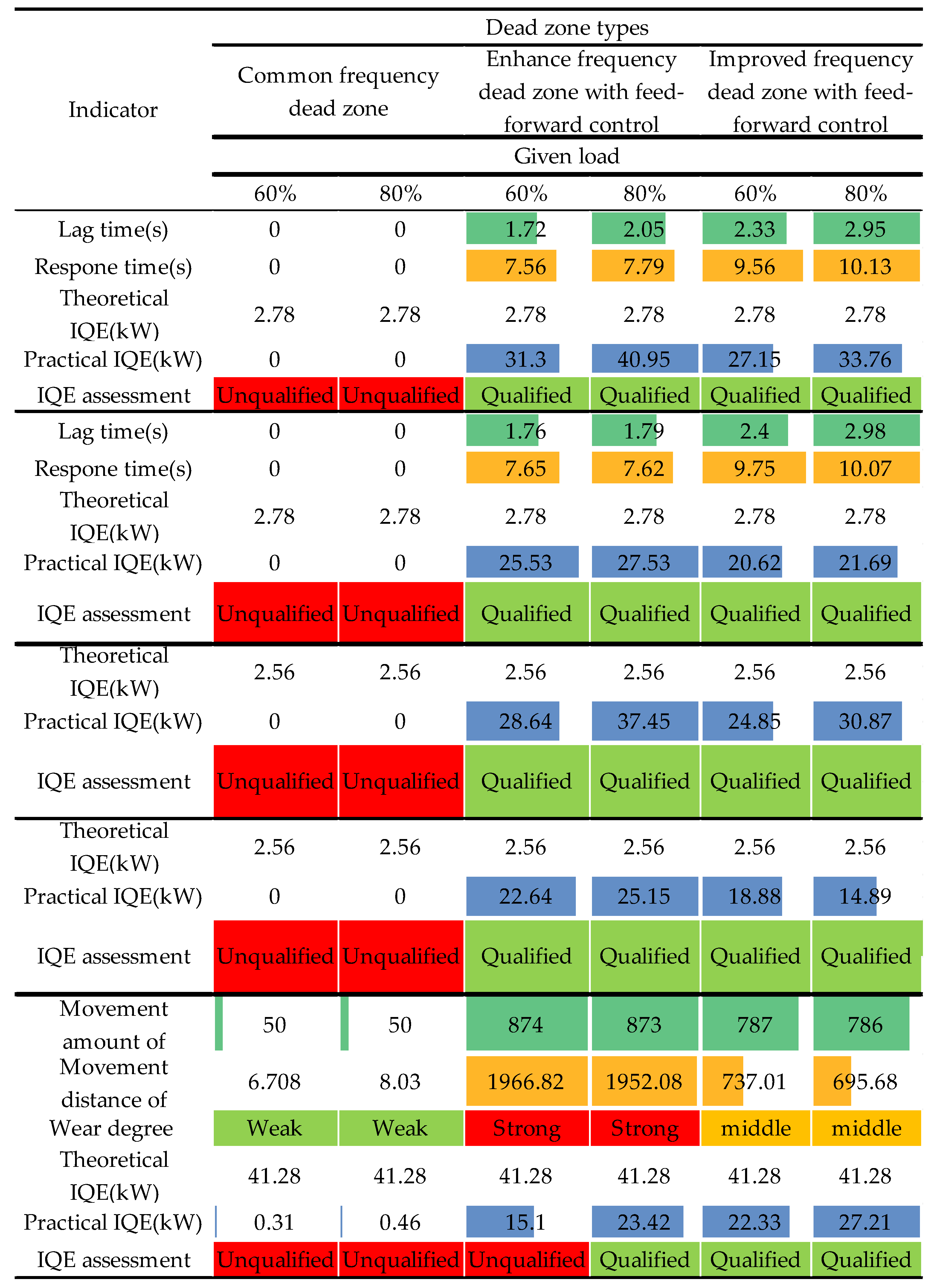
4.2. Trade-Off and Assessment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
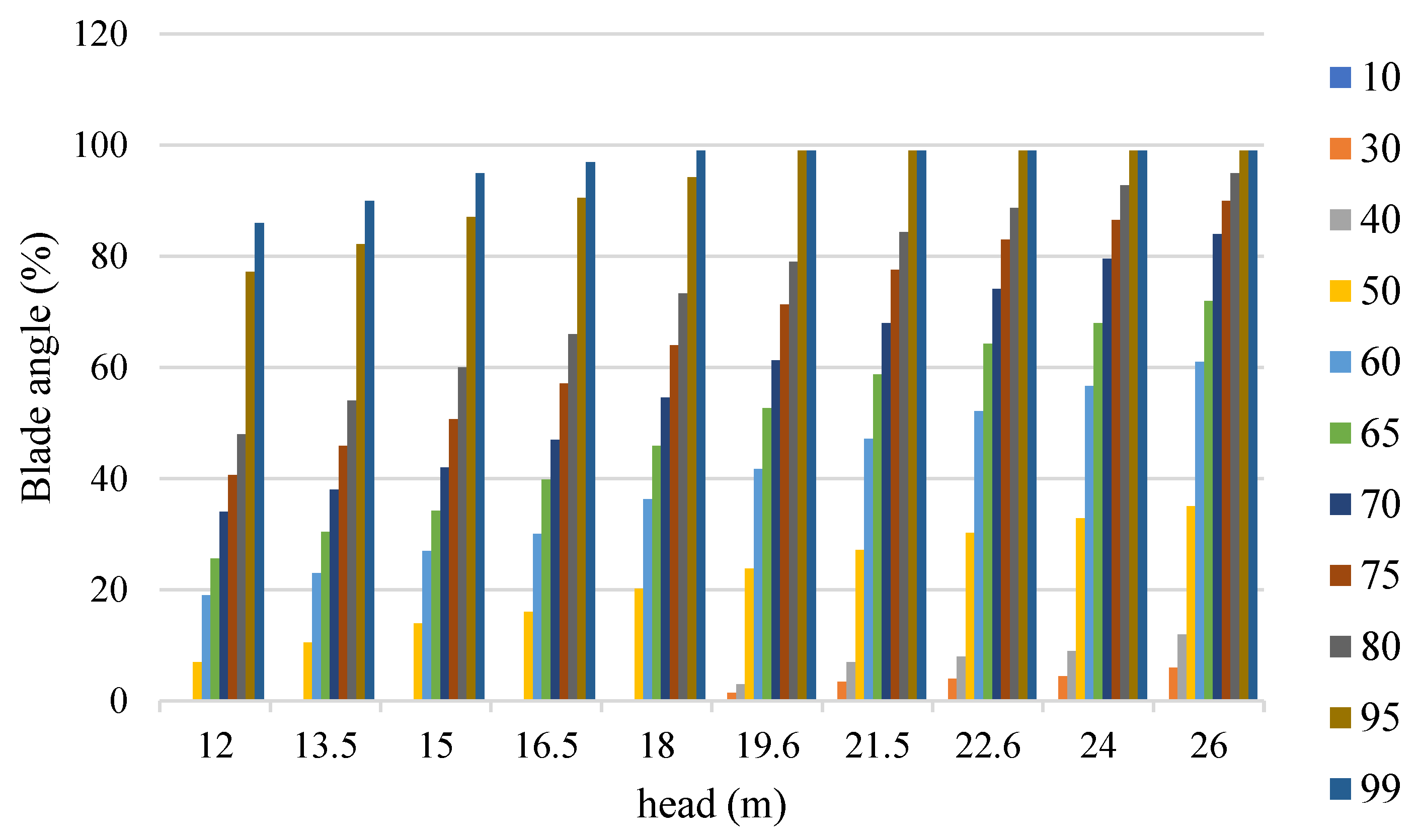
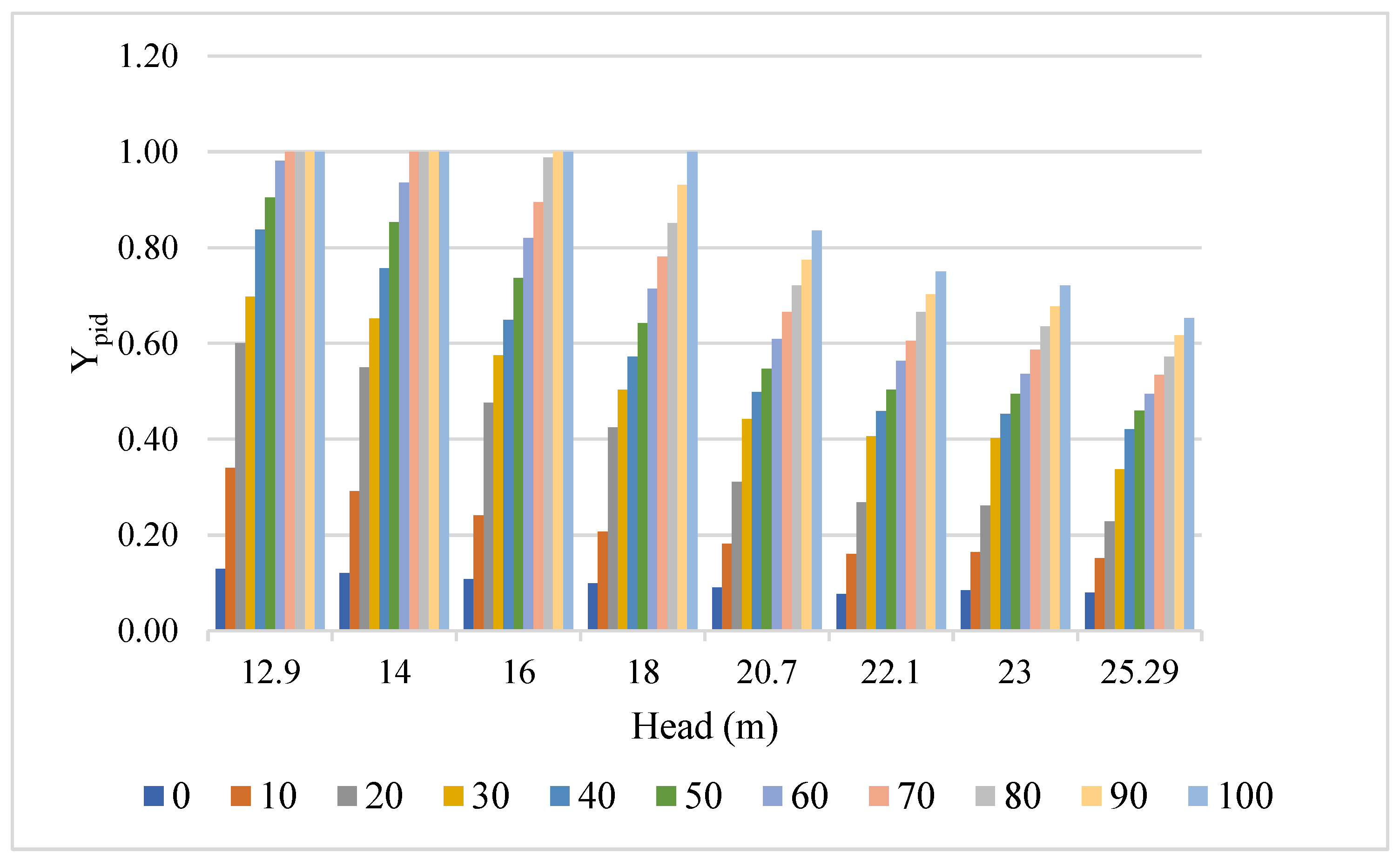
| Head/m | Ypid | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Load (%) | |||||||||||
| 0 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | |
| 12.9 | 0.13 | 0.34 | 0.60 | 0.70 | 0.84 | 0.90 | 0.98 | 1.00 | 1.00 | 1.00 | 1.00 |
| 14 | 0.12 | 0.29 | 0.55 | 0.65 | 0.76 | 0.85 | 0.94 | 1.00 | 1.00 | 1.00 | 1.00 |
| 16 | 0.11 | 0.24 | 0.48 | 0.58 | 0.65 | 0.74 | 0.82 | 0.90 | 0.99 | 1.00 | 1.00 |
| 18 | 0.10 | 0.21 | 0.42 | 0.50 | 0.57 | 0.64 | 0.71 | 0.78 | 0.85 | 0.93 | 1.00 |
| 20.7 | 0.09 | 0.18 | 0.31 | 0.44 | 0.50 | 0.55 | 0.61 | 0.67 | 0.72 | 0.77 | 0.84 |
| 22.1 | 0.08 | 0.16 | 0.27 | 0.41 | 0.46 | 0.50 | 0.56 | 0.61 | 0.67 | 0.70 | 0.75 |
| 23 | 0.08 | 0.16 | 0.26 | 0.40 | 0.45 | 0.49 | 0.54 | 0.59 | 0.64 | 0.68 | 0.72 |
| 25.29 | 0.08 | 0.15 | 0.23 | 0.34 | 0.42 | 0.46 | 0.49 | 0.53 | 0.57 | 0.62 | 0.65 |

| Parameter | Value |
|---|---|
| Rated output power (MW) | 50.1 |
| Rated discharge (m3/s) | 270.4 |
| Rated head (m) | 20.7 |
| Minimum head (m) | 12.9 |
| Maximum head (m) | 25.29 |
| Rated speed (rpm) | 115.4 |
| Vane Opening Values (%) | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 30 | 40 | 50 | 60 | 65 | 70 | 75 | 80 | 95 | 99 |
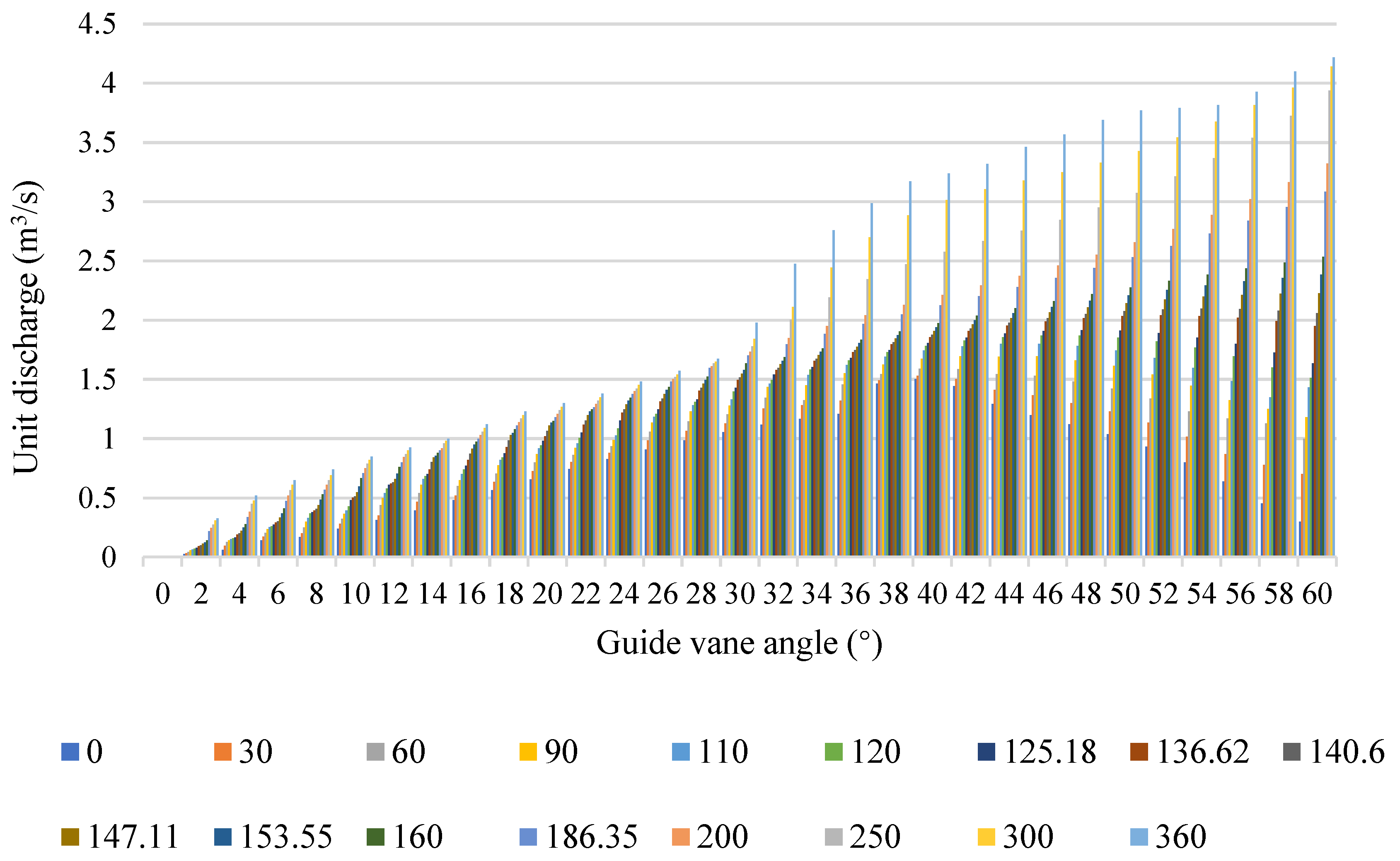
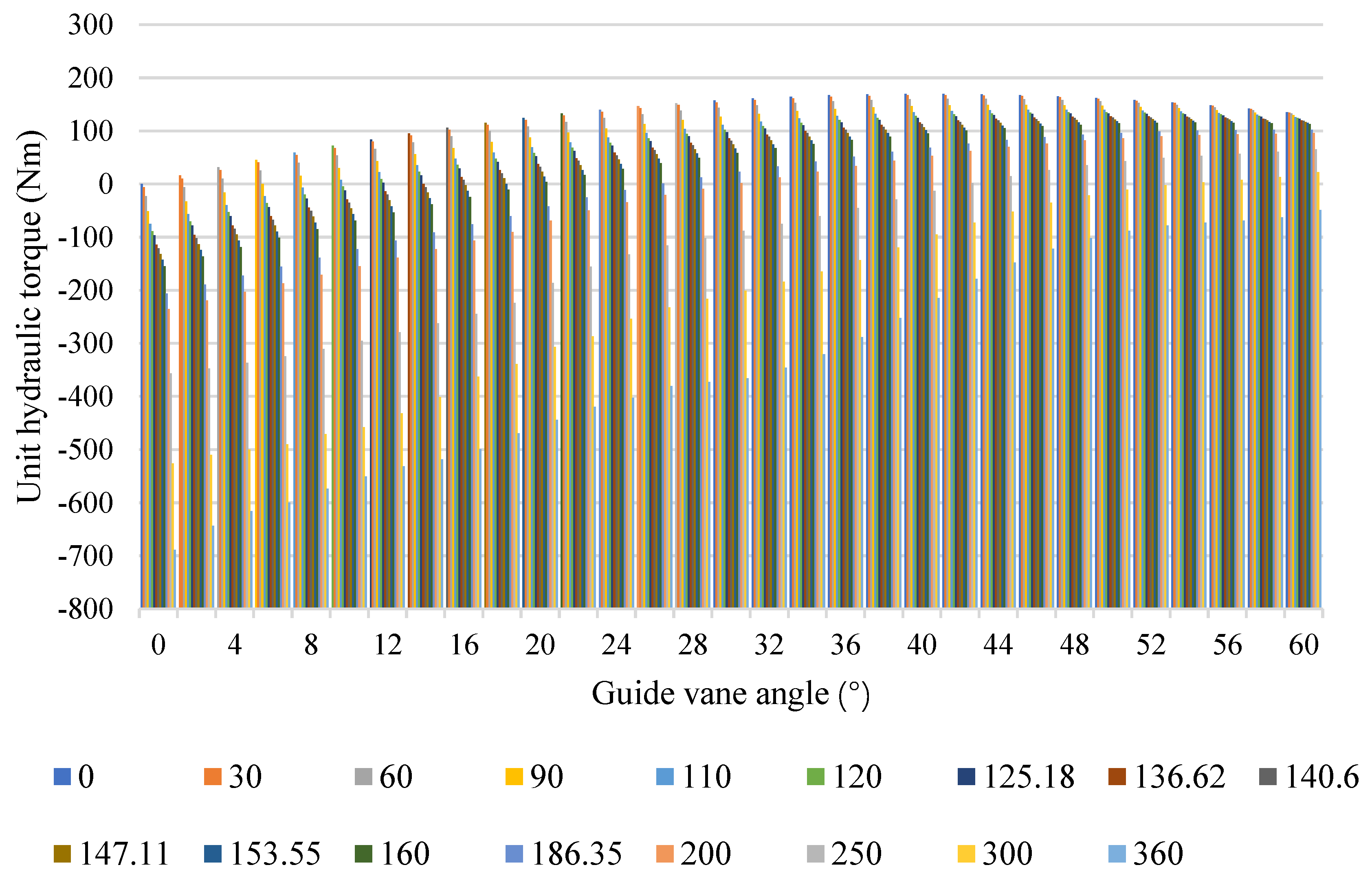
| Unit Rotation Speed (m/s) | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 30 | 60 | 90 | 110 | 120 | 125.18 | 136.62 | 140.6 | 147.11 | 153.55 | 160 | 186.35 | 200 | 250 | 300 | 360 |
| Parameter | Case1 | Case2 |
|---|---|---|
| ep | 0.03 | 0.03 |
| Kp | 0.1 | 0.1 |
| Kd | 0 | 0 |
| Ki, Kip | 0.15, 0 | 0.15, 0.4 |
| T1v | 0.16 | 0.16 |
| Ef | 0.05 | 0.05 |
| Ep | 0.005 | 0.03 |
| Ty | 8.33 | 8.33 |
| Tw | 1.7 | 1.7 |
| Ta | 8.76 | 8.76 |
| Initial Head (m) | 22.1 | 22.1 |
| Given load (%) | 60% | 60% & 80% |
| Step signal | ±0.055 Hz & ±0.065 Hz | ±0.055 Hz |


References
- Mitchell, C. Momentum is increasing towards a flexible electricity system based on renewables. Nat. Energy 2016, 1, 15030. [Google Scholar] [CrossRef]
- Brouwer, A.S.; van den Broek, M.; Seebregts, A.; Faaij, A. Operational flexibility and economics of power plants in future low-carbon power systems. Appl. Energy 2015, 156, 107–128. [Google Scholar] [CrossRef] [Green Version]
- Storli, P.; Nielsen, T. Dynamic load on a Francis turbine runner from simulations based on measurements. IOP Conf. Ser. Earth Environ. Sci. 2014, 22, 032056. [Google Scholar] [CrossRef]
- Doujak, E. Effects of increased solar and wind energy on hydro plant operation. Hydro Rev. Worldw. 2014, 2, 28–31. [Google Scholar]
- Ming, B.; Liu, P.; Guo, S.; Zhang, X.; Feng, M.; Wang, X. Optimizing utility-scale photovoltaic power generation for integration into a hydropower reservoir by incorporating long-and short-term operational decisions. Appl. Energy 2017, 204, 432–445. [Google Scholar] [CrossRef]
- Wang, W.; Li, C.; Liao, X.; Qin, H. Study on unit commitment problem considering pumped storage and renewable energy via a novel binary artificial sheep algorithm. Appl. Energy 2017, 187, 612–626. [Google Scholar] [CrossRef]
- Chang, M.K.; Eichman, J.D.; Mueller, F.; Samuelsen, S. Buffering intermittent renewable power with hydroelectric generation: A case study in California. Appl. Energy 2013, 112, 1–11. [Google Scholar] [CrossRef]
- Ma, T.; Yang, H.; Lu, L.; Peng, J. Pumped storage-based standalone photovoltaic power generation system: Modeling and techno-economic optimization. Appl. Energy 2015, 137, 649–659. [Google Scholar] [CrossRef]
- Yang, W.; Norrlund, P.; Saarinen, L.; Witt, A.; Smith, B.; Yang, J.; Lundin, U. Burden on hydropower units for short-term balancing of renewable power systems. Nat. Commun. 2018, 9, 2633. [Google Scholar] [CrossRef]
- Cebeci, M.E.; Karaagaç, U.; Tör, O.B.; Ertas, A. The effects of hydro power plants’governor settings on the stability of turkish power system frequency. In Proceedings of the 5th International Conference on Electrical and Electronics Engineering, Bursa, Turkey, 5–9 December 2007. [Google Scholar]
- Ela, E.; Tuohy, A.; Milligan, M.; Kirby, B.; Brooks, D. Alternative Approaches for Incentivizing the Frequency Responsive Reserve Ancillary Service. Electr. J. 2012, 25, 88–102. [Google Scholar] [CrossRef] [Green Version]
- Ela, E.; Gevorgian, V.; Tuohy, A.; Kirby, B.; Milligan, M.; O’Malley, M. Market Designs for the Primary Frequency Response Ancillary Service—Part I: Motivation and Design. IEEE Trans. Power Syst. 2014, 29, 421–431. [Google Scholar] [CrossRef]
- Raineri, R.; Ríos, S.; Schiele, D. Technical and economic aspects of ancillary services markets in the electric power industry: An international comparison. Energy Policy 2006, 34, 1540–1555. [Google Scholar] [CrossRef]
- Rebours, Y.G.; Kirschen, D.S.; Trotignon, M.; Rossignol, S. A survey of frequency and voltage control ancillary services—Part II: Economic features. IEEE Trans. Power Syst. 2007, 22, 358–366. [Google Scholar] [CrossRef]
- Rebours, Y.G.; Kirschen, D.S.; Trotignon, M. A Survey of Frequency and Voltage Control Ancillary Services-Part I: Technical Features. IEEE Trans. Power Syst. 2007, 22, 350–357. [Google Scholar] [CrossRef]
- Zhang, S.; Andrews-Speed, P.; Li, S. To what extent will China’s ongoing electricity market reforms assist the integration of renewable energy? Energy Policy 2018, 114, 165–172. [Google Scholar] [CrossRef]
- Ming, Z.; Ximei, L.; Lilin, P. The ancillary services in China: An overview and key issues. Renew. Sustain. Energy Rev. 2014, 36, 83–90. [Google Scholar] [CrossRef]
- Pollitt, M.; Yang, C.-H.; Chen, H. Reforming the Chinese Electricity Supply Sector: Lessons from International Experience; Cambridge Working Papers in Economics; University of Cambridge: Cambridge, UK, 2017. [Google Scholar]
- Yang, W.; Yang, J.; Guo, W.; Norrlund, P. Response time for primary frequency control of hydroelectric generating unit. Int. J. Electr. Power Energy Syst. 2016, 74, 16–24. [Google Scholar] [CrossRef] [Green Version]
- Wei, S. Analysis and Simulation on the Primary Frequency Regulation and Isolated Grid Operation Characteristics of Hydraulic Turbine Regulating Systems. Hydropower Autom. Dam Monit. 2009, 33, 27–33. (In Chinese) [Google Scholar]
- Jones, D.I.; Mansoor, S.P.; Aris, F.C.; Jones, G.R.; Bradley, D.A.; King, D.J. A standard method for specifying the response of hydroelectric plant in frequency-control mode. Electr. Power Syst. Res. 2004, 68, 19–32. [Google Scholar] [CrossRef]
- Andrade, J.; Júnior, E.; Ribeiro, L. Using genetic algorithm to define the governor parameters of a hydraulic turbine. In Proceedings of the 25th IAHR Symposium on Hydraulic Machinery and Systems, Timisoara, Romania, 20–24 September 2010. [Google Scholar]
- Li, C.S.; Zhou, J.Z. Parameters identification of hydraulic turbine governing system using improved gravitational search algorithm. Energy Convers. Manag. 2011, 52, 374–381. [Google Scholar] [CrossRef]
- Yang, W.; Norrlund, P.; Saarinen, L.; Yang, J.; Guo, W.; Zeng, W. Wear and tear on hydro power turbines–Influence from primary frequency control. Renew. Energy 2016, 87, 88–95. [Google Scholar] [CrossRef]
- Yang, W.; Norrlund, P.; Saarinen, L.; Yang, J.; Zeng, W.; Lundin, U. Wear reduction for hydro power turbines considering frequency quality of power systems: A study on controller filters. IEEE Trans. Power Syst. 2016, 32, 1191–1201. [Google Scholar]
- Ukonsaari, J. Wear, fraction and synthetic esters in a boundary lubricated journal bearing. Tribol. Int. 2003, 36, 821–826. [Google Scholar] [CrossRef]
- Gawarkiewicz, R.; Wasilczuk, M. Wear measurements of self-lubricating bearing materials in small oscillatory movement. Wear 2007, 263, 458–462. [Google Scholar] [CrossRef]
- Simmons, G.F. Journal Bearing Design, Lubrication and Operation for Enhanced Performance; University of Technology: Luleå, Sweden, 2013. [Google Scholar]
- Chirag, T.; Bhupendra, G.; Michel, C. Effect of transients on Francis turbine runner life: A review. J. Hydraul. Res. 2013, 51, 12. [Google Scholar]
- Huth, H. Fatigue Design of Hydraulic Turbine Runners; Department of Engineering Design & Materials: Trondheim, Norway, 2005. [Google Scholar]
- Gagnon, M.; Tahan, S.A.; Bocher, P. Impact of startup scheme on Francis runner life expectancy. IOP Conf. Ser. Earth Environ. Sci. 2010, 12, 012107. [Google Scholar] [CrossRef] [Green Version]
- Wurm, E. Consequences of Primary Control to the Residual Service Life of Kaplan Runners. In Proceedings of the Russia Power 2013 & Hydro vision Russia, Moscow, Russia, 4–6 March 2013. [Google Scholar]
- Nilsson, O.; Sjelvgren, D. Hydro unit start-up costs and their impact on the short term scheduling strategies of Swedish power producers. IEEE Trans. Power Syst. 1997, 12, 38–44. [Google Scholar] [CrossRef]
- Bakken, B.H.; Bjorkvoll, T. Hydropower unit start-up costs. In Proceedings of the 2002 IEEE Power Engineering Society Summer Meeting, Chicago, IL USA, 21–25 July 2002; pp. 1522–1527. [Google Scholar]
- Nilsson, O.; Sjelvgren, D. Variable splitting applied to modelling of start-up costs in short term hydro generation scheduling. IEEE Trans. Power Syst. 1997, 12, 770–775. [Google Scholar] [CrossRef]
- Guisandez, I.; Perez-Díaz, J.I.; Wilhelmi, J.R. Assessment of the economic impact of environmental constraints on annual hydropower plant operation. Energy Policy 2013, 61, 1332–1343. [Google Scholar] [CrossRef]
- Aggidis, G.A.; Luchinskaya, E.; Rothschild, R.; Howard, D. The costs of small-scale hydro power production: Impact on the development of existing potential. Renew. Energy 2010, 35, 2632–2638. [Google Scholar] [CrossRef]
- Huang, S.R.; Chang, P.L.; Hwang, Y.W.; Ma, Y.H. Evaluating the productivity and financial feasibility of a vertical-axis micro-hydro energy generation project using operation simulations. Renew. Energy 2014, 66, 241–250. [Google Scholar] [CrossRef]
- Bean, N.G.; O’Reilly, M.M.; Sargison, J.E. A Stochastic Fluid Flow Model of the Operation and Maintenance of Power Generation Systems. IEEE Trans. Power Syst. 2010, 25, 1361–1374. [Google Scholar] [CrossRef]
- Ieee BE. IEEE Guide for the Application of Turbine Governing Systems for Hydro Electric Generating Units; IEEE Std. 1207–2011 (Revision to IEEE Std. 1207-2004); IEEE: New York, NY, USA, 2011; pp. 1–131. [Google Scholar]
- Li, X.; Xu, G.; Huang, Q. Analysis of dynamic response of enhanced primary frequency regulation of hydropower units. Water Resour. Power 2016, 34, 152–155. (In Chinese) [Google Scholar]
- Khodabakhshian, A.; Hooshmand, R. A new PID controller design for automatic generation control of hydro power systems. Int. J. Electr. Power Energy Syst. 2010, 32, 375–382. [Google Scholar] [CrossRef]
- Kishor, N.; Saini, R.P.; Singh, S.P. A review on hydropower plant models and control. Renew. Sustain. Energy Rev. 2007, 11, 776–796. [Google Scholar] [CrossRef]
- China Electricity Council, The grid operation code. C.E. Council, DL/T 1040–2007; China Electricity Council: Beijing, China, 2007. [Google Scholar]




















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
An, H.; Yang, J.; Yang, W.; Cheng, Y.; Peng, Y. An Improved Frequency Dead Zone with Feed-Forward Control for Hydropower Units: Performance Evaluation of Primary Frequency Control. Energies 2019, 12, 1497. https://doi.org/10.3390/en12081497
An H, Yang J, Yang W, Cheng Y, Peng Y. An Improved Frequency Dead Zone with Feed-Forward Control for Hydropower Units: Performance Evaluation of Primary Frequency Control. Energies. 2019; 12(8):1497. https://doi.org/10.3390/en12081497
Chicago/Turabian StyleAn, Hao, Jiandong Yang, Weijia Yang, Yuanchu Cheng, and Yumin Peng. 2019. "An Improved Frequency Dead Zone with Feed-Forward Control for Hydropower Units: Performance Evaluation of Primary Frequency Control" Energies 12, no. 8: 1497. https://doi.org/10.3390/en12081497
APA StyleAn, H., Yang, J., Yang, W., Cheng, Y., & Peng, Y. (2019). An Improved Frequency Dead Zone with Feed-Forward Control for Hydropower Units: Performance Evaluation of Primary Frequency Control. Energies, 12(8), 1497. https://doi.org/10.3390/en12081497