Performance of the Stator Winding Fault Diagnosis in Sensorless Induction Motor Drive



Abstract
:1. Introduction
- To verify whether the proposed diagnostic procedure is able to diagnose the faulted stator winding of an induction motor within a sensorless DFOC structure correctly;
- To verify whether a speed estimator is able to estimate speed in the case of stator winding failures.
2. Mathematical Models
2.1. Mathematical Model of Healthy Induction Motor
- Stator and rotor voltage equations:where us = usα + jusβ is the stator voltage space vector, rs is the stator resistance, is = isα + jisβ is the stator current space vector, TN = 1/(2πfsN) is the time constant (only in the per unit system), fsN is the nominal frequency of IM, ψs = ψsα + jψsβ is the stator flux space vector, rr is the rotor resistance, ir = irα + jirβ is the rotor current vector, ψr = ψrα + jψrβ is the rotor flux space vector, and ωm is the mechanical speed.
- Stator and rotor flux equations:where ls = lm + lsσ is the stator winding inductance, lm is the main inductance, lsσ is the stator leakage inductance, lr = lm + lrσ is the rotor winding inductance, and lrσ is the rotor leakage inductance.
- Electromagnetic torque and equation of motion:where te is the electromagnetic torque, tl is the load torque, and TM is the mechanical time constant of the drive.
2.2. Mathematical Model of Eq-SMMRASCC Speed Estimator
3. DFOC Control Structure
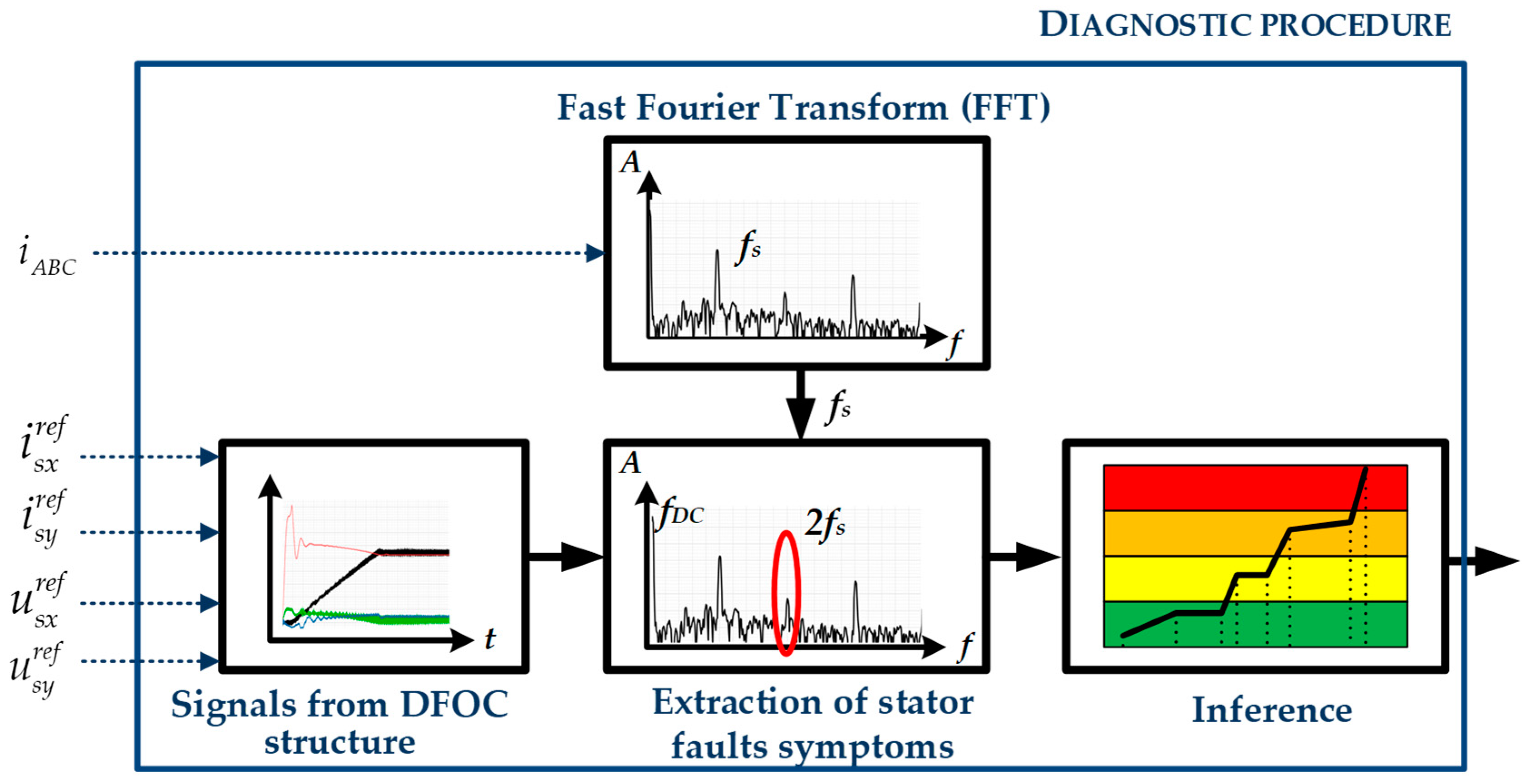
4. Diagnostic Procedure
- Identification of the fundamental frequency fs of induction motor supply voltages or currents. In this paper, the phase currents are used to determine the frequency, as shown in Figure 2—the currents have to be measured in the DFOC structure. However, measured stator voltage or calculated voltage vector components usα and usβ can be used as well. The identification is made using the fast Fourier transform (FFT) with a selected window (flat-top in this paper). Because of this, the diagnostic procedure must be conducted during a steady-state, while the motor speed is constant.
- Extraction of four reference signals from the control structure; reference stator current vector components and reference voltage vector components.
- Determination of the 2fs harmonics frequency amplitudes for all diagnostic signals. These amplitudes will be used further as fault symptoms.
- Depending on the determined values of fault symptoms, an inference is drawn regarding whether the motor is healthy or not. It can be based on a predefined threshold. In the case of an industrial inverter, the threshold can be determined during the commissioning stage, i.e., during the identification procedure of motor parameters (this is a standard procedure in the case of all modern voltage source inverters (VSIs) applied in the industry, where the vector control method is used). In this case, the threshold can be set as the maximum value of the second harmonic amplitude for all of the diagnostic signals. Unfortunately, their values depend slightly on motor speed and load torque, therefore the threshold should be increased suitably so as not to generate false alarms. This dependence will be shown in the subsequent sections.
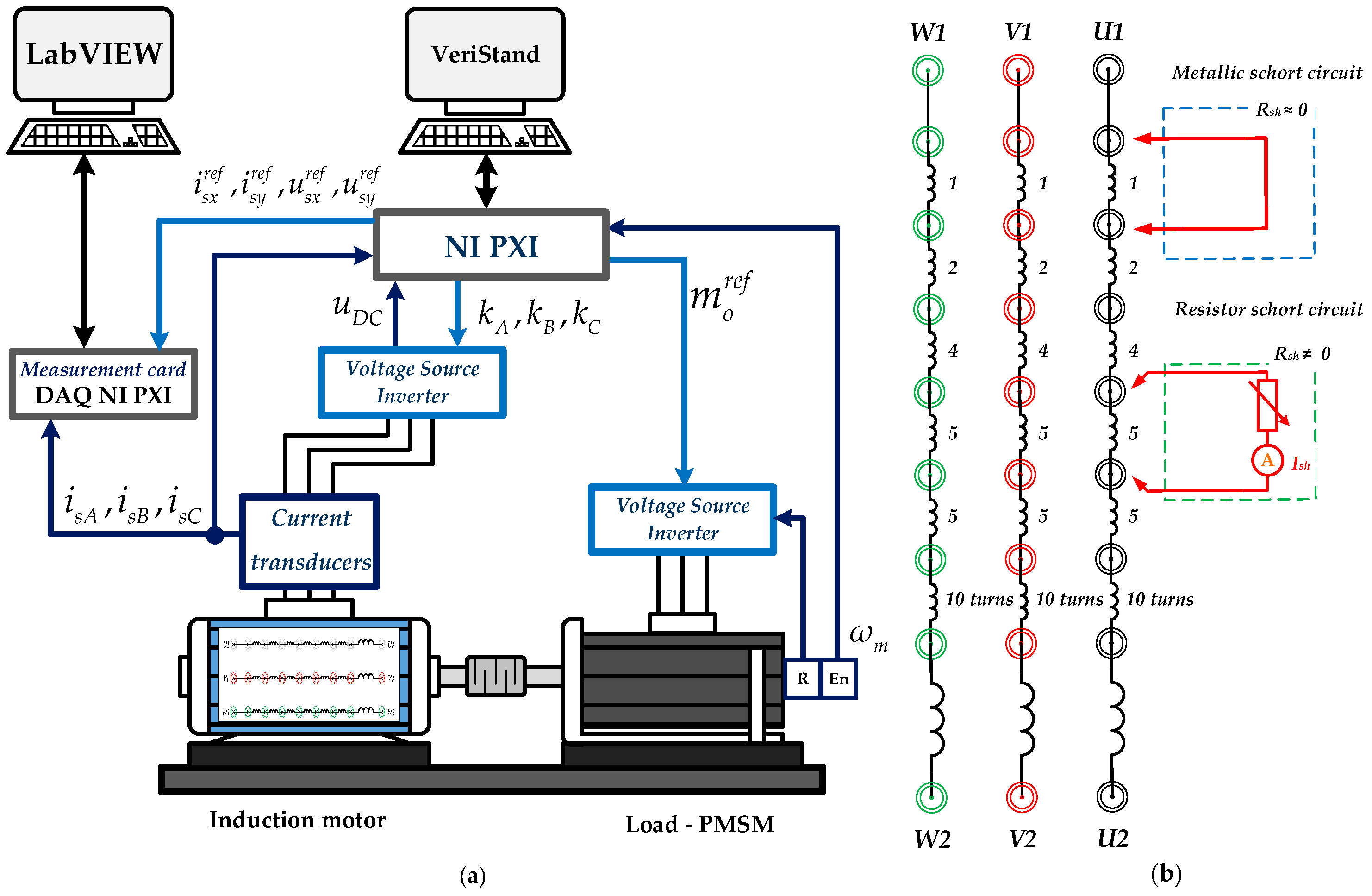
5. Description of the Experimental Set-up
6. Experimental Verification
6.1. Sensorless Control in Case of non-Faulty Operation
6.2. On-line Speed Estimation and Fault Diagnosis
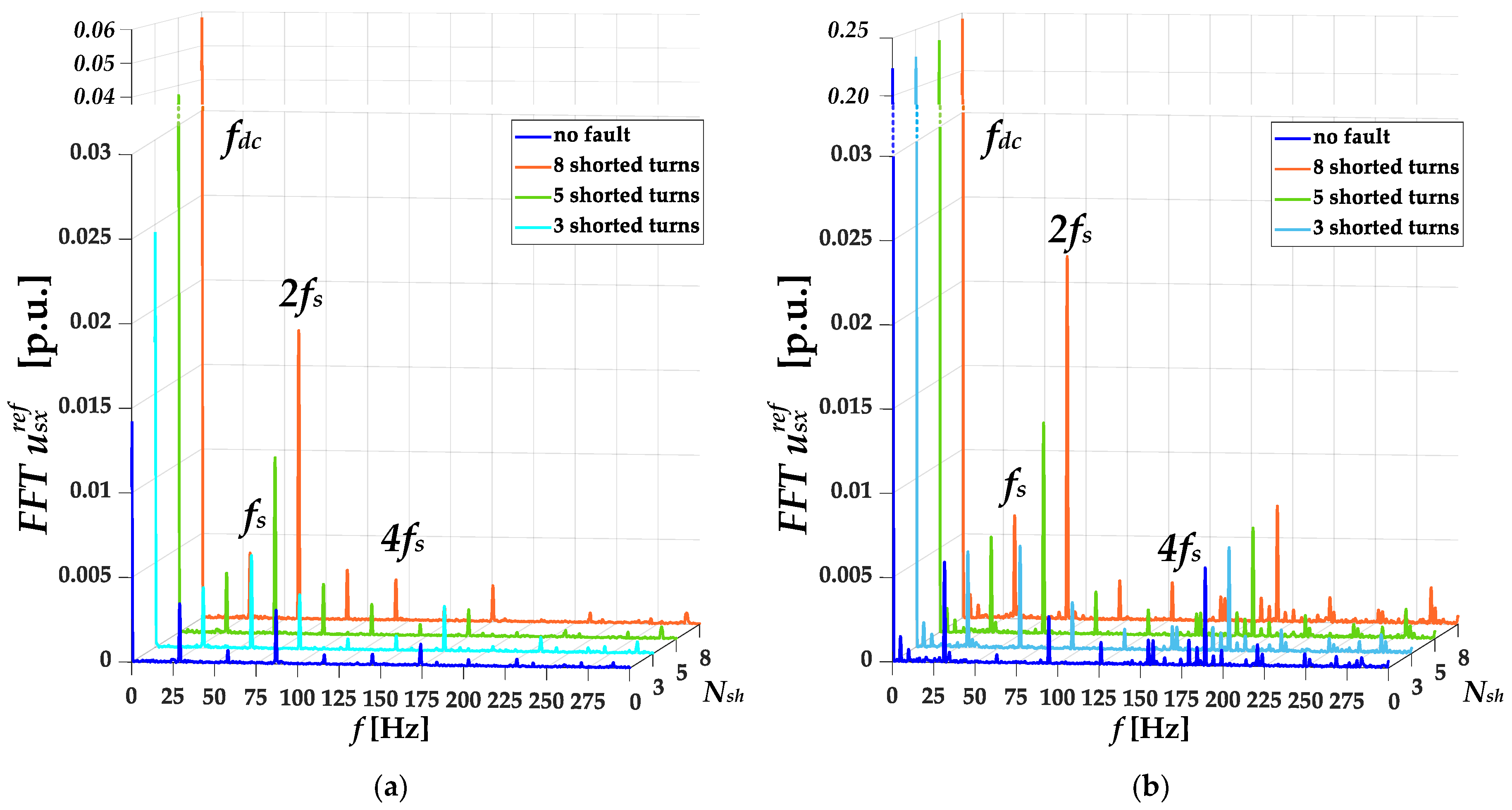
6.3. FFT Analysis of the Diagnostic Signals Under Sensorless Operation
6.4. Influence of Load Torque and Motor Speed on the Effectiveness of the Diagnostic Procedure
6.5. The Difference Between Sensorless Operation and Speed Sensor Usage
6.6. Influence of the PI Controller Parameters on the Diagnostic Procedure
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controlled Variable | Kp | Ti |
|---|---|---|
| Speed | Kp_ω = 3 | Ti_ ω= 0.05 s |
| Rotor flux amplitude | Kp_ψ = 6 | Ti_ ψ= 0.01 s |
| Torque-producing current component | Kp_isx = 1 | Ti_ isx= 0.01 s |
| Field-producing current component | Kp_isy = 1 | Ti_ isy= 0.01 s |
Appendix B
| Name | Symbol | SI Units | Normalized Units [p.u.] | |
|---|---|---|---|---|
| Power | PN | 3000 | [W] | 0.6394 |
| Speed | NN | 1445 | [r/min] | 0.963 |
| Stator phase voltage | UsN | 400 | [V] | 0.707 |
| Stator current | IsN | 6.8 | [A] | 0.707 |
| Frequency | fsN | 50 | [Hz] | 1 |
| Rotor flux | ψrN | 0.927 | [Wb] | 0.895 |
| Torque | TlN | 19.83 | [Nm] | 0.664 |
| Pole pairs | pp | 2 | - | - |
| Stator resistance | Rs | 1.768 | [Ω] | 0.0523 |
| Rotor resistance | Rr | 1.4970 | [Ω] | 0.0443 |
| Main inductance | Lm | 181.5 | [mH] | 1.6858 |
| Stator leakage inductance | Lsσ | 8.9 | [mH] | 0.0827 |
| Rotor leakage inductance | Lrσ | 8.9 | [mH] | 0.0827 |
| Number of stator turns | Ns | 3x180 | [-] | [-] |
References
- Cheng, S.; Zhang, P.; Habetler, T.G. An Impedance Identification Approach to Sensitive Detection and Location of Stator Turn-to-Turn Faults in a Closed-Loop Multiple-Motor Drive. IEEE Trans. Ind. Electron. 2011, 58, 1545–1554. [Google Scholar] [CrossRef]
- Merizalde, Y.; Hernández-Callejo, L.; Duque-Perez, O. State of the art and trends in the monitoring, detection and diagnosis of failures in electric induction motors. Energies 2017, 10, 1056. [Google Scholar] [CrossRef]
- Henao, H.; Capolino, G.; Fernandez-Cabanas, M.; Filippetti, F.; Bruzzese, C.; Strangas, E.; Pusca, R.; Estima, J.; Riera-Guasp, M.; Hedayati-Kia, S. Trends in Fault Diagnosis for Electrical Machines: A Review of Diagnostic Techniques. IEEE Ind. Electron. Mag. 2014, 8, 31–42. [Google Scholar] [CrossRef]
- Wolkiewicz, M.; Kowalski, C.T. Incipient stator fault detector based on neural networks end symmetrical components analysis for induction motor drives. In Proceedings of the 13th Selected Issues of Electrical Engineering and Electronics (WZEE), Rzeszow, Poland, 4–8 May 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Tallam, R.M.; Lee, S.B.; Stone, G.C.; Kliman, G.B.; Yoo, J.; Habetler, T.G.; Harley, R.G. A survey of methods for detection of stator-related faults in induction machines. IEEE Trans. Ind. Appl. 2007, 43, 920–933. [Google Scholar] [CrossRef]
- Tallam, R.M.; Habetler, T.G.; Harley, R.G. Stator winding turn-fault for closed-loop induction motor drives. IEEE Trans. Ind. Appl. 2003, 39, 720–724. [Google Scholar] [CrossRef]
- Maraaba, L.; Al-Hamouz, Z.; Abido, M. An efficient stator inter-turn fault diagnosis tool for induction motors. Energies 2018, 11, 653. [Google Scholar] [CrossRef]
- Cruz, S.M.A.; Cardoso, A.J.M. Diagnosis of stator inter-turn short circuits in DTC induction motor drives. IEEE Trans. Ind. Appl. 2004, 40, 1349–1360. [Google Scholar] [CrossRef]
- Wolkiewicz, M.; Tarchała, G.; Orłowska-Kowalska, T.; Kowalski, C.T. Online Stator Interturn Short Circuits Monitoring in the DFOC Induction-Motor Drive. IEEE Trans. Ind. Electron. 2016, 63, 2517–2528. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition monitoring and fault diagnosis of electrical motors—A review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Singh, G. Induction machine drive condition monitoring and diagnostic research—A survey. Electr. Power Syst. Res. 2003, 64, 145–158. [Google Scholar] [CrossRef]
- Berzoy, A.; Mohammed, O.A.; Restrepo, J. Analysis of the Impact of Stator Interturn Short-Circuit Faults on Induction Machines Driven by Direct Torque Control. IEEE Trans. Energy Convers. 2018, 33, 1463–1474. [Google Scholar] [CrossRef]
- Cruz, S.M.A.; Cardoso, A.J.M. Diagnosis of rotor faults in direct and indirect FOC induction motor drives. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 284–293. [Google Scholar] [CrossRef]
- Wolkiewicz, M.; Tarchała, G.; Kowalski, C.T. Stator windings condition diagnosis of voltage inverter-fed induction motor in open and closed-loop control structures. Arch. Electr. Eng. 2015, 64, 67–79. [Google Scholar] [CrossRef]
- Bellini, A.; Filippetti, F.; Franceschini, G.; Tassoni, C. Closed-loop control impact on the diagnosis of induction motors faults. IEEE Trans. Ind. Appl. 2000, 36, 1318–1329. [Google Scholar] [CrossRef]
- Seshadrinath, J.; Singh, B.; Panigrahi, B.K. Investigation of Vibration Signatures for Multiple Fault Diagnosis in Variable Frequency Drives Using Complex Wavelets. IEEE Trans. Power Electron. 2014, 29, 936–945. [Google Scholar] [CrossRef]
- Seshadrinath, J.; Singh, B.; Panigrahi, B.K. Vibration Analysis Based Interturn Fault Diagnosis in Induction Machines. IEEE Trans. Ind. Inform. 2014, 10, 340–350. [Google Scholar] [CrossRef]
- Kowalski, C.T.; Wierzbicki, R.; Wolkiewicz, M. Stator and Rotor Faults Monitoring of the Inverter-Fed Induction Motor Drive using State Estimators. Automatika 2013, 54, 348–355. [Google Scholar] [CrossRef]
- Bednarz, S.A.; Dybkowski, M.; Wolkiewicz, M. Identification of the Stator Faults in the Induction Motor Drives Using Parameter Estimator. In Proceedings of the 18th IEEE International Power Electronics and Motion Control Conference (PEMC), Budapest, Hungary, 26–30 August 2018; pp. 688–693. [Google Scholar] [CrossRef]
- Wolkiewicz, M.; Tarchała, G.; Orlowska-Kowalska, T.; Kowalski, C. Stator fault monitoring based on internal signals of vector controlled induction motor drives. In Proceedings of the 42nd Annu. Conf. IEEE Ind. Electron. Soc. (IECON), Florence, Italy, 23–26 October 2016; pp. 2651–2656. [Google Scholar] [CrossRef]
- Pacas, M. Sensorless Drives in Industrial Applications. IEEE Ind. Electron. Mag. 2011, 5, 16–23. [Google Scholar] [CrossRef]
- Kumar, R.; Das, S.; Syam, P.; Chattopadhyay, A.K. Review on model reference adaptive system for sensorless vector control of induction motor drives. IET Electr. Power Appl. 2015, 9, 496–511. [Google Scholar] [CrossRef]
- Kandoussi, Z.; Boulghasoul, Z.; Elbacha, A.; Tajer, A. Sensorless control of induction motor drives using an improved MRAS observer. J. Electr. Eng. Technol. 2017, 12, 1456–1470. [Google Scholar] [CrossRef]
- Chen, B.; Yao, W.; Chen, F.; Lu, Z. Parameter Sensitivity in Sensorless Induction Motor Drives With the Adaptive Full-Order Observer. IEEE Trans. Ind. Electron. 2015, 62, 4307–4318. [Google Scholar] [CrossRef]
- Etien, E.; Chaigne, C.; Bensiali, N. On the stability of full adaptive observer for induction motor in regenerating mode. IEEE Trans. Ind. Electron. 2010, 57, 1599–1608. [Google Scholar] [CrossRef]
- Harnefors, L.; Hinkkanen, M. Complete stability of reduced-order and full-order observers for sensorless IM drives. IEEE Trans. Ind. Electron. 2008, 55, 1319–1329. [Google Scholar] [CrossRef]
- Tarchała, G.; Orłowska-Kowalska, T. Equivalent-Signal-Based Sliding Mode Speed MRAS-Type Estimator for Induction Motor Drive Stable in the Regenerating Mode. IEEE Trans. Ind. Electron. 2018, 65, 6936–6947. [Google Scholar] [CrossRef]
- Korzonek, M.; Orłowska-Kowalska, T. Comparative Stability Analysis of Stator Current Error-Based Estimators of the Induction Motor Speed. Power Electron. Drives 2018, 3, 187–203. [Google Scholar] [CrossRef]
- Lin, F.J.; Wai, R.J.; Kuo, R.H.; Liu, D.C. A comparative study of sliding mode and model reference adaptive speed observers for induction motor drive. Electr. Power Syst. Res. 1998, 44, 163–174. [Google Scholar] [CrossRef]
- Chen, F.; Dunnigan, M.W. Comparative study of a Sliding-Mode Observer and Kalman filters for full state estimation in an induction machine. IEE Proc.-Elect. Power Appl. 2002, 149, 53–64. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, Z.; Lu, T.; Yuan, L.; Xu, W.; Zhu, J. A comparative study of Luenberger Observer, Sliding Mode Observer and Extended Kalman Filter for sensorless vector control of induction motor drives. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), San Jose, CA, USA, 20–24 September 2009; pp. 2466–2473. [Google Scholar] [CrossRef]
- Khater, M.M.; Zaky, M.S.; Yasin, H.; Shokralla, S.S.; Ei-Sabbe, A. A comparative study of sliding mode and Model Reference Adaptive Speed observers for induction motor drives. In Proceedings of the 11th International Middle East Power Systems Conference (MEPCON), El-Minia, Egypt, 19–21 December 2006; pp. 434–440. [Google Scholar]
- Sutnar, Z.; Peroutka, Z.; Rodič, M. Comparison of Sliding Mode Observer and Extended Kalman Filter for Sensorless DTC-Controlled Induction Motor Drive. In Proceedings of the 14th International Power Electronics and Motion Control Conference (EPE-PEMC), Ohrid, Macedonia, 6–8 September 2010; pp. 55–62. [Google Scholar] [CrossRef]
- Hamajima, T.; Hasegawa, M.; Doki, S.; Okuma, S. Sensorless Vector Control of Induction Motor Stabilized at the Whole Region with Speed and Stator Resistance Identification based on Augmented Error. IEEJ Trans. Ind. Appl. 2006, 155, 52–63. [Google Scholar] [CrossRef]
- Doki, S.; Sangwongwanich, S.; Okuma, S. Implementation of speed-sensor-less field-oriented vector control using adaptive sliding observer. In Proceedings of the International Conference on Industrial Electronics, Control, Instrumentation, and Automation (IECON), San Diego, CA, USA, 13 November 1992; pp. 453–458. [Google Scholar] [CrossRef]
- Gadoue, S.M.; Giaouris, D.; Finch, J.W. MRAS Sensorless Vector Control of an Induction Motor Using New Sliding-Mode and Fuzzy-Logic Adaptation Mechanisms. IEEE Trans. Energy Convers. 2010, 25, 394–402. [Google Scholar] [CrossRef]
- Comanescu, M.; Xu, L.Y. Sliding-mode MRAS speed estimators for sensorless vector control of induction machine. IEEE Trans. Ind. Electron. 2006, 53, 146–153. [Google Scholar] [CrossRef]
- Vieira, R.P.; Gastaldini, C.C.; Azzolin, R.Z.; Gründling, H.A. Discrete-time sliding mode speed observer for sensorless control of induction motor drives. IET Electr. Power Appl. 2012, 6, 681–688. [Google Scholar] [CrossRef]
- Vieira, R.P.; Gabbi, T.S.; Grundling, H. Combined Discrete-time Sliding Mode and Disturbance Observer for Current Control of Induction Motors. J. Control Autom. Electr. Syst. 2017, 28, 380–388. [Google Scholar] [CrossRef]
- Zhao, L.H.; Huang, J.; Liu, H.; Li, B.N.; Kong, W.B. Second-Order Sliding-Mode Observer With Online Parameter Identification for Sensorless Induction Motor Drives. IEEE Trans. Ind. Electron. 2014, 61, 5280–5289. [Google Scholar] [CrossRef]
- Baccarini, L.M.R.; Tavares, J.P.B.; de Menezes, B.R.; Caminhas, W.M. Sliding mode observer for on-line broken rotor bar detection. Electr. Power Syst. Res. 2010, 80, 1089–1095. [Google Scholar] [CrossRef]
- Sellami, T.; Berriri, H.; Jelassi, S.; Mimouni, M.F. Sliding Mode Observer-Based Fault-Detection of Inter-Turn Short-Circuit in Induction Motor. In Proceedings of the 14th International Conference on Electrical Engineering, Computing Science and Automatic Control (STA), Sousse, Tunisia, 20–22 December 2013; pp. 524–529. [Google Scholar] [CrossRef]
- Sellami, T.; Berriri, H.; Jelassi, S.; Darcherif, A.M.; Mimouni, M.F. Short-Circuit Fault Tolerant Control of a Wind Turbine Driven Induction Generator Based on Sliding Mode Observers. Energies 2017, 10, 1611. [Google Scholar] [CrossRef]
- Maamouri, R.; Trabelsi, M.; Boussak, M.; M’Sahli, F. A sliding mode observer for inverter open-switch fault diagnostic in sensorless induction motor drive. In Proceedings of the 42nd Annual Conference of the IEEE Industrial Electronics Society (IECON), Florence, Italy, 23–26 October 2016; pp. 2153–2158. [Google Scholar] [CrossRef]
- Kommuri, S.K.; Rath, J.J.; Veluvolu, K.C.; Defoort, M.; Soh, Y.C. Decoupled current control and sensor fault detection with second-order sliding mode for induction motor. IET Control Theory Appl. 2015, 9, 608–617. [Google Scholar] [CrossRef]
- Kaźmierkowski, M.; Krishnan, R.; Blaabjerg, F. Control in Power Electronics—Selected Problems; Academic Press—An imprint of Elsevier Science: San Diego, CA, USA, 2002; p. 250. [Google Scholar]
- Tarchała, G. Influence of the sign function approximation form on performance of the sliding-mode speed observer for induction motor drive. In Proceedings of the International Symposium on Industrial Electronics, Gdańsk, Poland, 27–30 June 2011; pp. 1397–1402. [Google Scholar] [CrossRef]
- Yan, Z.; Jin, C.X.; Utkin, V.I. Sensorless sliding-mode control of induction motors. IEEE Trans. Ind. Electron. 2000, 47, 1286–1297. [Google Scholar] [CrossRef]
















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tarchała, G.; Wolkiewicz, M. Performance of the Stator Winding Fault Diagnosis in Sensorless Induction Motor Drive. Energies 2019, 12, 1507. https://doi.org/10.3390/en12081507
Tarchała G, Wolkiewicz M. Performance of the Stator Winding Fault Diagnosis in Sensorless Induction Motor Drive. Energies. 2019; 12(8):1507. https://doi.org/10.3390/en12081507
Chicago/Turabian StyleTarchała, Grzegorz, and Marcin Wolkiewicz. 2019. "Performance of the Stator Winding Fault Diagnosis in Sensorless Induction Motor Drive" Energies 12, no. 8: 1507. https://doi.org/10.3390/en12081507
APA StyleTarchała, G., & Wolkiewicz, M. (2019). Performance of the Stator Winding Fault Diagnosis in Sensorless Induction Motor Drive. Energies, 12(8), 1507. https://doi.org/10.3390/en12081507