Impact of Trajectories’ Uncertainty in Existing ATC Complexity Methodologies and Metrics for DAC and FCA SESAR Concepts

 ,
,  , ,
, ,
Abstract
:1. Introduction
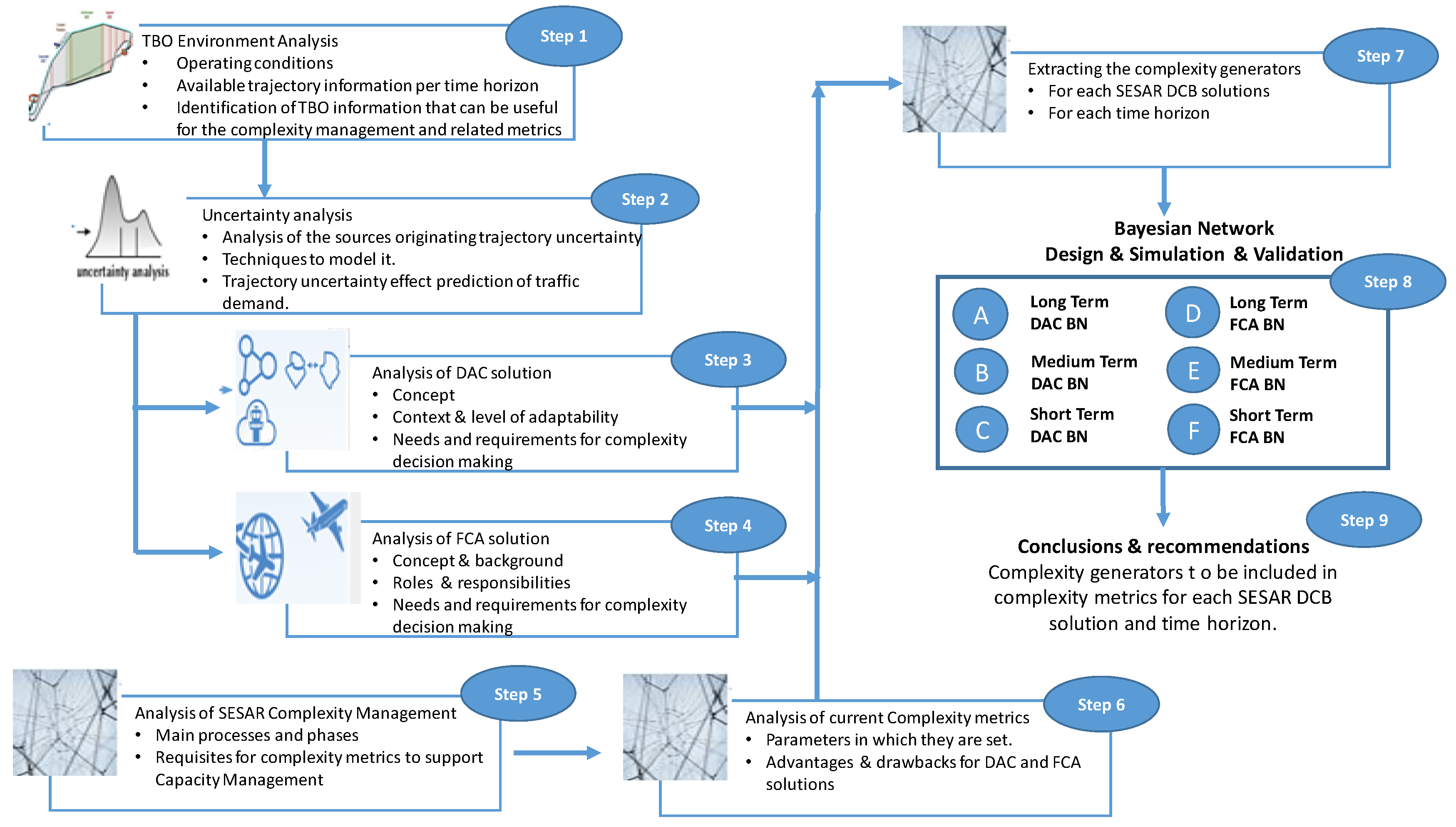
2. Materials and Methods
- (1)
- the set of complexity generators recommended as inputs in the complexity metrics and algorithms for each application and time horizon;
- (2)
- the list of that would require further reduction in uncertainty; and
- (3)
- an evaluation of the adaptability of current complexity metrics for DAC and FCA environment.
3. Step 1. TBO Environment Analysis
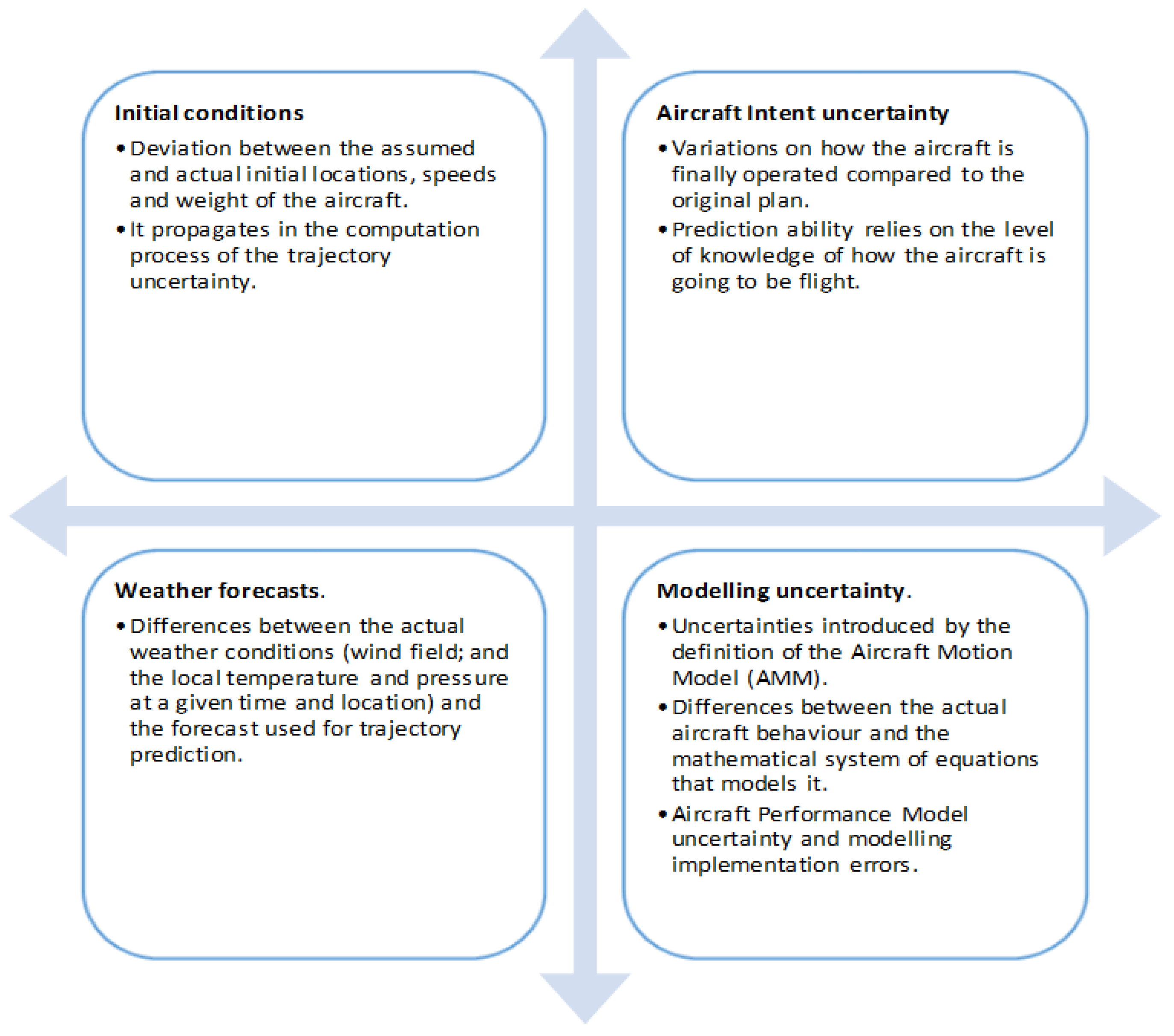
4. Step 2: Trajectory Uncertainty Analysis
4.1. Uncertaitny Sources
4.2. Modellign Techniques
4.3. Impact of Trajectory Uncertainty on the Traffic Demand
5. SEPT 3: Analysis of the DAC Solution
6. SETP 4: Analysis of the FCA Solution
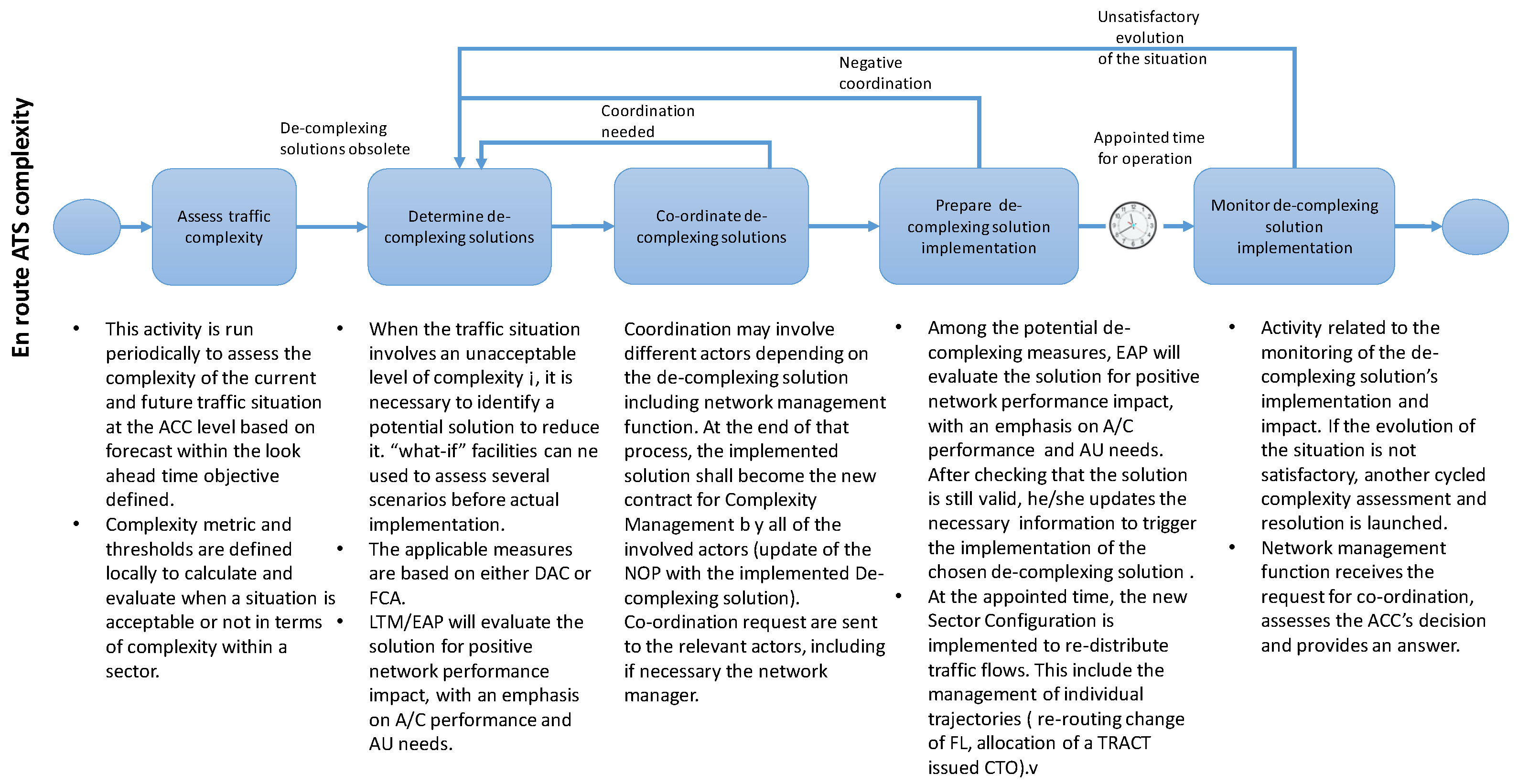
7. Step 5: Analysis of the SESAR Complexity Management
- Availability of airspace (e.g., due to weather, airspace reservation);
- Availability of ATC sector capacity;
- Airspace users’ preferences;
- Air Traffic target times as results of AMAN, DMAN and Extended AMAN processes);
- The Network stability requirements; and
- iRBT (initial Reference Business Trajectory) and iRMT (Initial Reference Mission Trajectory) update rules.
- Accuracy of the input Flight Data Processing (FDP) data to be used for complexity prediction, due to the required time horizon and quality characteristics of that data;
- Human Factors (HF) constrains related to frequent sector configuration changes;
- Additional co-ordination procedures required by introducing of additional layer of planning without adequate automated support.
8. STEP 6: Analysis of Current Complexity Metrics
- They are usually not generalized and are linked to the studied sector, highly dependent on the type of algorithm used to resolve conflicts, and on specific system used to process trajectories. Whereas, in the DAC solution there will be no pre-defined sectors, and in FCA solution there will be co-existence of several controllers operating in the same airspace;
- They are subjective and sensitive to the controllers used to infer the model since most of them focus on the opinion, behaviour, habits and subjective performance of the controller;
- Traffic is usually managed at tactical level in the current system. However, in the new ATM system traffic complexity should support Capacity Management processes. Thus, complexity assessment should be examined to support in managing controllers’ workload;
- They are sensitive to minor fluctuation in the traffic demand. This is more expressed with instantaneous metrics, but aggregated metrics are unstable and depend on the aggregation period (20 min, 1 h, etc.) as well. This means that uncertainty in the prediction of traffic demand have high influence at the resulting complexity level;
- Beside the need for the complexity assessment methodology that takes into account trajectory uncertainty, there is also a need for traffic complexity metrics that takes into account system robustness. That will allow to determine how much system solution is invariant to changes in the initial conditions and external (random) influences, and be more representative of the expected traffic load and stable over the prediction time horizon;
- Some of them are adapted for the post-operational performance evaluation or macroscopic (strategic) system evaluation, whereas, to support capacity management, metrics need to be used operationally for the real-time decision support;
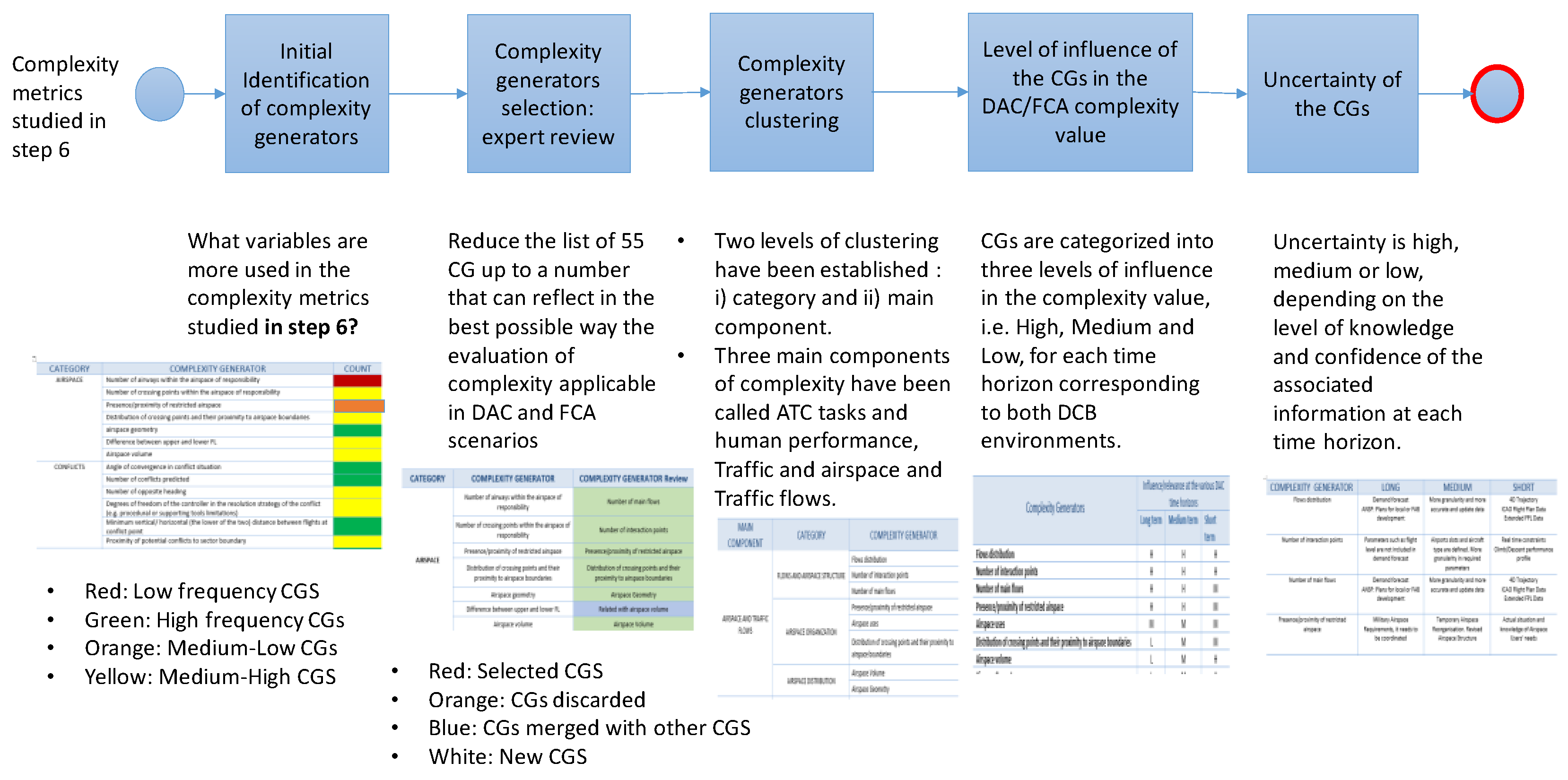
9. STEP 7: Extracting the Complexity Generators
- Initial identification of complexity generators. The first step for the CGs selection was to determine what variables are more used in the complexity metrics studied in step 6. Variables were translated into complexity generators, and a table was built, as shown in Figure 4, accounting for the CATEGORY (such as airspace, conflicts, flow organization…), the COMPLEXITY GENERATOR (such as airspace geometry, weather conditions, number of conflicts predicted…) and the COUNT, which indicate frequency with a colour code. This analysis doesn’t indicate what CGs are most influential to complexity but only the frequency in studied metrics. The complexity generators initial list was made up of 55 CGs.
- Complexity Generators Selection: expert review. The aim of the first COTTON workshop was to reduce the list of 55 complexity generators up to a number that can reflect in the best possible way the evaluation of complexity applicable in DAC and FCA. A final table (see Figure 4) was produced by the experts indicating: Complexity Generators selected (green), Complexity Generators discarded (orange); Complexity Generators merged with other cgs (blue); and new Complexity Generators (white).
- Complexity Generators Clustering. Two levels of clustering have been established: (i) category and (ii) main component. Category groups the complexity generators that may be related to specific elements in an ATM scenario. Main components symbolize states that determinate the complexity value, that is: airspace or static state, air traffic or dynamic state, and cognitive or human factors. Accordingly, the three main components of complexity have been called ATC tasks and human performance, Traffic and airspace and Traffic flows.
- Level of Influence of the CGs in the DAC/FCA complexity value. This step aims to evaluate level of influence of complexity generators on the complexity value. Complexity generators were categorized into three levels of influence in the complexity value, i.e., High, Medium and Low, for each time horizon corresponding to both DCB environments. For the sake of illustration, Table 4 shows the level of impact of each CG in complexity value for each time horizon in the DAC concept being High influence (H), Medium influence (M) or Low influence (L).
- Uncertainty of Complexity Generators. Uncertainty is high, medium or low, depending on the level of knowledge and confidence of the associated information at each time horizon. When approaching to the time of operation, available data will be more accurate and therefore uncertainty will be lower. Table 5 illustrates the uncertainty of each CGs at each time horizon in DAC.
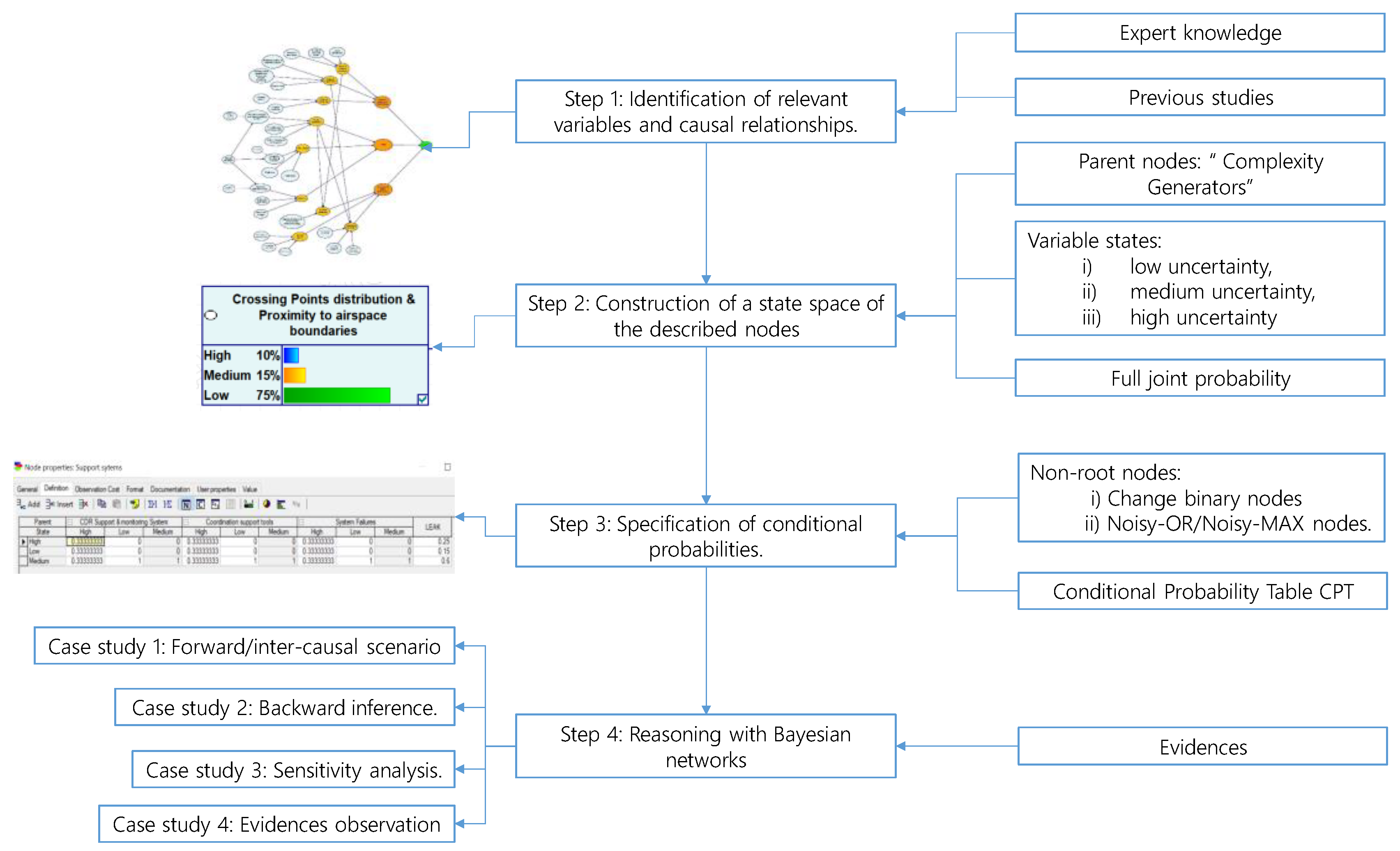
10. STEP 8: Bayesian Network Modelling
- On one side, they will help to identify what complexity generators need to be properly taken into account and analysed by the complexity algorithms and metrics adapted to the DAC and FCA concepts. Among the set of current variables considered complexity generators, the BN will help to highlight which ones are expected to have a High (H), Medium (M), or Low (L) influence in the complexity outcome itself, depending on the concept and timeframe considered. The future complexity algorithms and metrics might take this outcome as an indication of which variables, because of their influence on complexity, need to be carefully addressed by the metrics and algorithms.
- At the same time, the networks will help to identify whether the a-priori uncertainty probability distribution of each of those variables (considering the various timeframe horizons) will be compatible with maintaining the uncertainty of complexity outcome at a LOW or MEDIUM state, or which ones will need further improvements reducing its level of uncertainty. The future complexity algorithms and metrics might take this outcome as an indication of the uncertainty they might expect for each complexity generator (High, Medium or Low), and according to that decide the best approach to characterize and measure this variable in each scenario.
- State space of each node. Next step is the construction of a state space of the described nodes, i.e., the definition of the variable states and the full joint probability of all parent nodes in the network. The state space of each parent node represents the level of uncertainty that affects a particular variable or complexity generator. The uncertainty affecting each variable has been discretised into three different states: (i) low uncertainty, (ii) medium uncertainty, and (iii) high uncertainty. Therefore, all the nodes have these three states.
- Specification of conditional probabilities. In the following step, conditional probabilities at non-root nodes are defined, considering every potential mixture of parent nodes’ values. Conditional Probability Tables (CPTs) or distributions are employed depending whether variables are discrete and continuous. Child nodes conditional probabilities can be derived either from statistical learning or from expert knowledge elicitation [45]. In our network, conditional probabilities are derived considering the influence of each variable into its child’s specified in Step 7.
- Reasoning and analysis. Four different case studies or inferences have been analysed for each of the Bayesian networks.
- ○
- Case study 1: Forward scenario (sometimes referred also as inter-causal analysis). The model is used to predict the effects, i.e., the uncertainty level in the complexity metric by setting the uncertainties level in the complexity generators, i.e., by setting the probability distribution of the parent-input nodes. This case study is useful to answer the following research question: Given the probability distribution of the uncertainty of the various complexity generators, how these uncertainties propagate through the network causing a probability distribution for the uncertainty (% of high uncertainty, % of medium uncertainty or % of low uncertainty) in the outcome of the network, “complexity”? This is a typical prediction scenario.
- ○
- Case study 2: Backward inference. The model is used to deliver the parent’s node configuration by setting the outcome node (uncertainty level of the complexity metric) to a target value. In this analysis complexity uncertainty is successively settled to a high, medium or low value. Then, the network identify the main contributors to the value of complexity uncertainty, or what configuration of uncertainty might be admitted at the various complexity generators to provide the target outcome uncertainty. This case study is useful to answer the following questions: how much will it be necessary to improve uncertainty in the inputs nodes to achieve a certain uncertainty level in the outcome node?; or what will be the probability of any fault (uncertainty level of the input nodes) given a set of symptoms or results (uncertainty level of the outcome)? This is a typical fault diagnosis scenario.
- ○
- Case study 3: Sensitivity analysis. It is used to investigate the impact of small variations in input parameters probabilities eon the posterior probabilities of the output parameters.
- ○
- Case study 4: Evidences observation. As far as detailed characterization of the uncertainty of a variable is observed (high, medium or low uncertainty), the evidence can be pictured as propagated through the network. Then the network can be updated with such evidence, and the conditional probabilities of the rest of the variables, including the outcome are recalculated. These new values allow us to evaluate how much improvement can be achieving in reducing the uncertainty of the network outcome by improving the uncertainty related to one or some of the complexity generators.
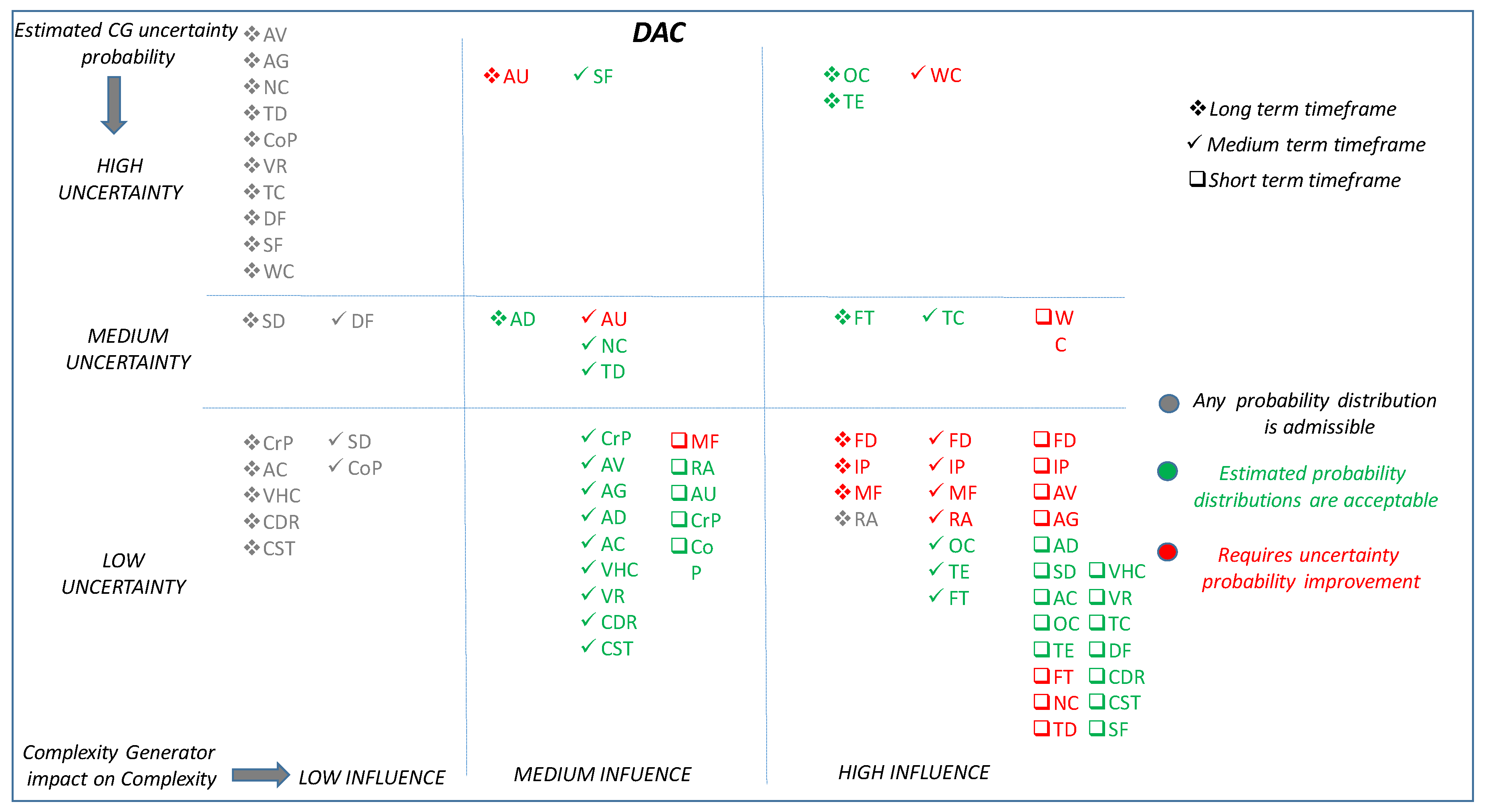
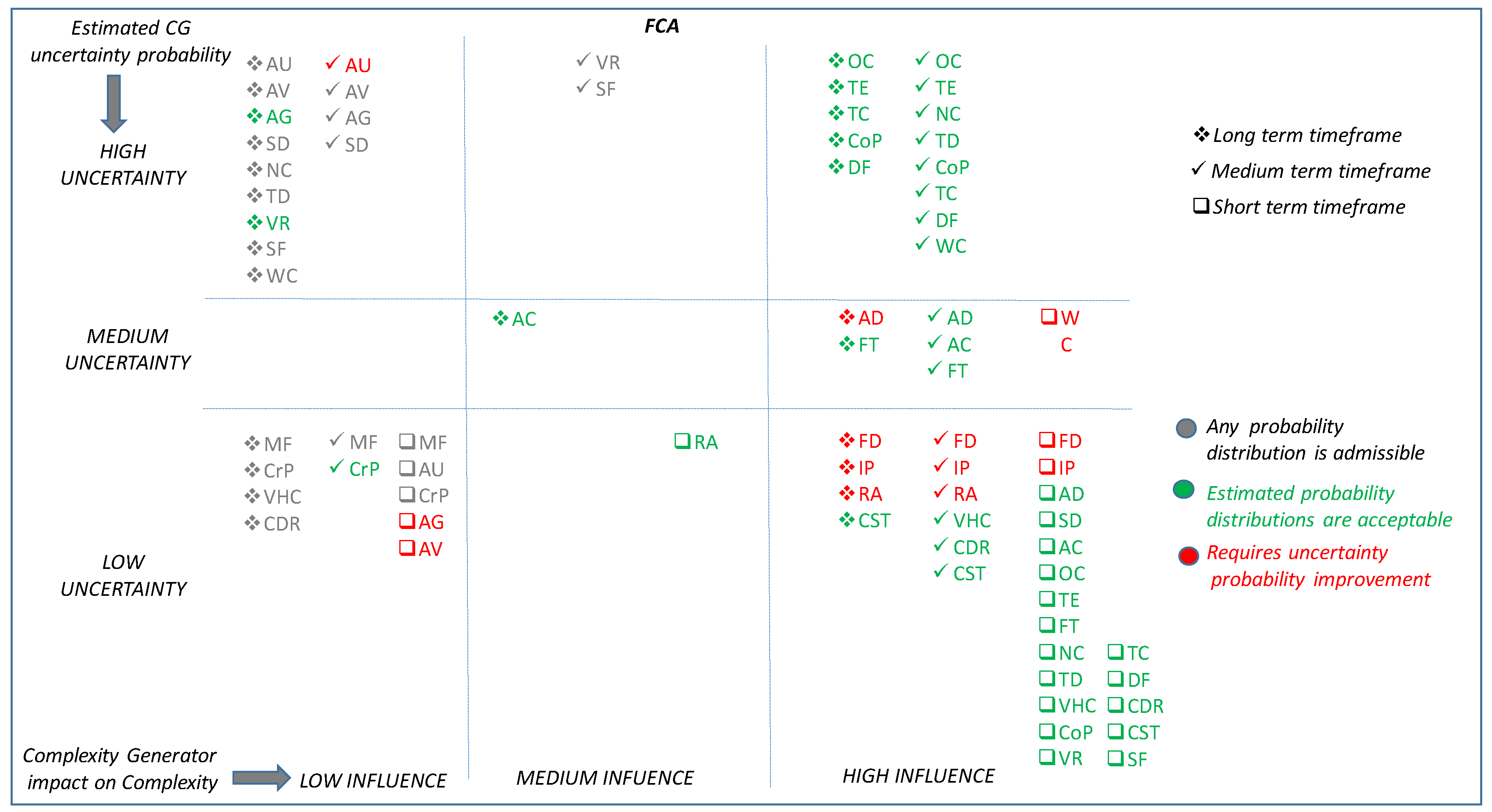
11. Step 9: Discussion of Results
- First, the complexity generators have been classified according to: (i) their level of influence on global complexity, in the horizontal dimension of the diagram; and (ii) their degree of uncertainty of the information, in the vertical dimension of the diagram.
- Following these criteria, the diagram is divided into nine regions of different influence on complexity and degree of uncertainty. For example, complexity generators placed on the bottom right corner of the diagram have high influence on complexity and a low degree of uncertainty associated to its information.
- Once the complexity generators have been classified, a colour code has been defined to reflect the results of the analysis. Red: Requires an improvement in the level of uncertainty of the information estimated for this generator, in the considered time horizon. Green: The estimated level of uncertainty may be acceptable to maintain final objectives of uncertainty in complexity. Grey: The uncertainty level does not impact the final result due to the low influence of the parameter.
- Finally, in the figure, each one of the time horizons considered is reflected with a different symbol: □ Short Term, √ Medium Term, and * Long Term.
- A big set of the complexity indicators in the long term have a low influence on the complexity assessment, and at the same time high uncertainty, and consequently the range of options for preferred candidates in the long term is also small for FCA.
- The pool of preferred candidates, those having high influence and low uncertainty, is also bigger in the short.
- Most of the variables are qualified either as low or high uncertainty, and only a few are considered with a medium level of uncertainty, although in the FCA case, the few ones with medium uncertainty are considered mostly of high influence.
- In the FCA diagram only a few number of variables is considered with medium influence, maximum two out of 25. The distribution of variables between low and high influence is more extreme that for the DAC. This can be easily noticed as the intermediate column in the diagram is almost empty.
- The number of variables requiring uncertainty reduction is lower in the short time frame for the FCA application.
- -
- Cells marked in green stand for the metrics that can be easily adapted to the conditions of that time horizon.
- -
- Cells marked in yellow represent the intermediate level of difficulty.
- -
- Cells marked in orange corresponds to those whose adaptation to the temporal horizon would require a greater level of effort, taking into account the recommendations made previously.
12. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| List of Symbols | |
| FD | Flows Distribution |
| IP | Number of interaction points |
| MF | Number of main flows |
| RA | Presence/proximity of restricted airspace |
| AU | Airspace uses |
| CrP | Distribution of crossing points and their proximity to airspace boundaries |
| AV | Airspace volume |
| AG | Airspace Geometry |
| AD | Altitude AC distribution |
| SD | Speed AC distribution |
| AC | Altitude AC changes |
| OC | Occupancy (per ATCO position) |
| TE | Traffic Entry (per ATCO position) |
| H | High influence |
| M | Medium influence |
| L | Low influence |
| FT | Distribution of flight time per aircraft under ATCO responsibility in the given timeframe |
| NC | Number of conflicts predicted |
| TD | Time difference at crossing points |
| VHC | Vertical and horizontal convergence |
| CoP | Coordination procedures |
| VR | Vectoring and operational restrictions |
| TC | Transition and changes in configuration |
| DF | Degrees of freedom of the controller in the resolution strategy of the conflict |
| CDR | CDR Support and monitoring System |
| CST | Coordination support tools |
| SF | System failure |
| WC | Weather conditions |
 | Short term timeframe |
 | Medium term timeframe |
 | Long term timeframe |
| List of Acronyms | |
| ADEP | Airport of DEStination |
| ADES | Airport of DEParture |
| AMAN | Arrival MANager |
| ANSPs | Air Navigation Service Providers |
| ATCO | Air Traffic Controller |
| ATM | Ai Traffic Management |
| BN | Bayesian Network |
| CDM | Collaborative Decision Making |
| CDR | ConDitional Route |
| CGs | Complexity Generators |
| COPTRA | Combining PRObable TRAjectories |
| CTO/CTA | Controlled Time Over/At |
| DAC | Dynamic Airspace Configuration |
| DAG | Directed Acyclic Graph (), |
| DCB | Demand Capacity Balance |
| DMAN | Departure MANagers |
| CORSE | Complexity Resolution Service |
| EET | Estimated Elapsed Times |
| EU | European Union |
| FCA | Flight Centric ATC |
| FDP | Flight Data Processing |
| FMS | Flight Management System |
| FPL | Flight Plan Level |
| FOC | Flight Operations Centre |
| GUFI | Global Unique Flight Identifier |
| HF | Human Factors |
| IATA | International Airline Traffic Association |
| INAP | Integrated Network Management and extended ATC planning |
| iRBT | initial Reference Business Trajectory |
| iRMT | Initial Reference Mission Trajectory |
| NPR | Nominal Preferred Route |
| TTA=/TTA | Target Times Over/At |
| SESAR 2020 | Single European Sky ATM Research |
| SBT | Shared Business Trajectory |
| RBT | Reference Business Trajectory |
| TBO | Trajectory Based Operations |
| TMA | Terminal Area Manoeuvring |
References
- ICAO. TBO Concept; ICAO: Montreal, QC, Canada, 2015. [Google Scholar]
- Sesar Joint Undertaking. SESAR2020, SESAR PJ09 OSED, 00.01.00 ed.; SESAR: Brussels, Belgium, 2017. [Google Scholar]
- Sesar Joint Undertaking. SESAR ConOPs at a Glance, 02.00.00 ed.; SESAR: Brussels, Belgium, 2011. [Google Scholar]
- Guichard, L.; Garnham, R.; Zerrouki, L.; Schede, N. Dynamic Airspace Configuration Step 2-V2 OSED; SESAR: Brussels, Belgium, 2016. [Google Scholar]
- Sergeeva, M.; Delahaye, D.; Zerrouki, L.; Schede, N. Dynamic Airspace Configurations Generated by Evolutionary Algorithms. In Proceedings of the 34th Digital Avionics Systems Conference, Prague, Czech Republic, 13–17 September 2015. [Google Scholar]
- SESAR Jont Undertaking. SESAR Solution PJ.10-01b (Flight Centred ATC) Intermediate SPR-Interop/OSED for V1—Part I; SESAR: Brussels, Belgium, 2018. [Google Scholar]
- Terzioski, P.; Cano, M.; Llorente, R. STEP1 V3 Final Complexity Management SPR; SESAR: Brussels, Belgium, 2016. [Google Scholar]
- Cano, M.; Terzioski, P.; Llorente, R.; Gómez, J. STEP1 V3 Final Complexity Management OSED; SESAR: Brussels, Belgium, 2016. [Google Scholar]
- Hof, H.; Flohr, R.; Nunez, O.; Garr, R. Time Adherence in TBO; ATMRPP-WG/27-WP/636, ICAO—AIR Traffic; Management Requirements and Performance Panel (Atmrpp): Montreal, QC, Canada, 2014. [Google Scholar]
- Radišić, T.; Radišić, T. The Effect of Trajectory-Based Operations on Air Traffic Complexity. Ph.D. Thesis, Faculty of Transport and Traffic Sciences, Sveučilište u Zagrebu, Zagreb, 2014. [Google Scholar]
- COPTRA. Techniques to Determine Trajectory Uncertainty and Modelling; SESAR: Brussels, Belgium, 2016. [Google Scholar]
- Casado, E.; la Civita, M.; Vilaplana, M. Quantification of Aircraft Trajectory Prediction Uncertainty Using Polynomial Chaos Expansions. In Proceedings of the IEEE/AIA 36th Digital Avionics Systems Conference, St. Petersburg, FL, USA, 17–21 September 2017. [Google Scholar]
- Franco, A.; Rivas, D.; Valenzuela, A. Optimal Aircraft Path Planning Considering Wind Uncertainty. In Proceedings of the 7th European Conference for Aeronautics and Space Sciences, Milan, Italy, 3–6 July 2017. [Google Scholar]
- Zhu, K.; Wang, J.; Mitchell, T.; Supamusdisukul, T. Pre-Departure Stochastic Trajectory Modeling and Its Calibration with Oceanic Operational Data. In Proceedings of the 12th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Indianapolis, Indiana, 17–19 September 2012. [Google Scholar]
- Mueller, T.; Sorensen, J.; Couluris, G. Strategic aircraft trajectory prediction uncertainty and statistical sector traffic load modelling. In Proceedings of the AIAA Guidance, Navigation and Control Conference, Monterrey, CA, USA, 5–8 August 2002. [Google Scholar]
- Margellos, K.; Lygeros, J. Toward 4D Trajectory Management in Air Traffic Control: A Study Based on Monte Carlo Simulation and Reachability Analysis. IEEE Trans. Control Syst. Technol. 2013, 21, 1820–1833. [Google Scholar] [CrossRef]
- Knorr, D.; Walter, L. Trajectory uncertainty and the impact on sector complexity and workload. In SESAR Innovation Days; SESAR: Brussels, Belgium, 2011. [Google Scholar]
- Kim, J.; Tandale, M.; Menon, P.K. Modeling Air-Traffic Service Time Uncertainties for Queuing Network Analysis. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 525–541. [Google Scholar]
- Sergeeva, M. Automated Airspace Sectorization by Genetic Algorithm. Optimization and Control. Ph.D. Thesis, Université Paul Sabatier, Toulouse, France, 2017. [Google Scholar]
- Meckiff, C.; Chone, R.; Nicolaon, J.P. The Tactical Load Smoother for Multi-Sector Planning. In Proceedings of the USA/Europe Air Traffic Management R&D Seminar, Orlando, FL, USA, 1–4 December 1998. [Google Scholar]
- Whiteley, M. PHARE Advanced Tools—Tactial Load Smoother; Eurocontrol: Brussels, Belgium, 1999. [Google Scholar]
- Liang, D.; Mondoloni, S. Airspace fractal dimension and applications. In Proceedings of the USA/Europe Air Traffic Management R&D Seminar, FAA&EUROCONTROL, Santa Fe, NM, USA, 4–7 December 2011. [Google Scholar]
- Comendador, V.F.G.; de Frutos, P.L.; Puntero, E.; Ballestín, E.L.; Cañas, J.J.; Ferreiras, P.; Valdes, R.A.; Sanz, A.R. An ATCo Psychological Model with Automation. In Proceedings of the 7th EASN International Conference, Warsaw, Poland, 26–29 September 2017. [Google Scholar]
- Hermes, P.; Mulder, M.; van Paassen, M. Solution-Space-Based Analysis of the Difficulty of Aircraft Merging Tasks. J. Aircr. 2009, 46, 1995–2015. [Google Scholar] [CrossRef]
- D’Engelbronner, J.; Borst, C.; Ellerbroek, J.; van Paassen, M.; Mulder, M. Solution-Space Based Analysis of Dynamic Air Traffic Controller Workload. J. Aircr. 2015, 52, 1146–1160. [Google Scholar] [CrossRef]
- Idris, H.; Delahaye, D.; Wing, D. Distributed Trajectory Flexibility Preservation for Traffic Complexity Mitigation. In Proceedings of the Eighth USA/Europe Air Traffic Management Research and Development Seminar (ATM2009), Napa, CA, USA, 29 June–2 July 2009. [Google Scholar]
- Prevot, T.; Lee, P. Trajectory-Based Complexity (TBX): A modified aircraft count to predict sector complexity during trajectory-based operations. In Proceedings of the IEEE/AIAA 30th Digital Avionics Systems Conference, Seattle, WA, USA, 16–20 October 2011. [Google Scholar]
- Prandini, M.; Piroddi, L.; Puechmorel, S.; Bráz, S. iFly D3.1., Complexity Metrics Applicable to Autonomous Aircraft; SESAR: Brussels, Belgium, 2009. [Google Scholar]
- Laudeman, I.; Shelden, S.; Branstrom, R.; Brasi, C. Dynamic Density: An Air Traffic Management Metric, NASA-TM-1998-112226; NASA: Moffet Field, CA, USA, 1999.
- Delahaye, D.; Puechmorel, S. Air traffic complexity: Towards intrinsic. In Proceedings of the USA/Europe Air Traffic Management R&D Seminar, Napoli, Italy, 3–6 June 2000. [Google Scholar]
- Delahaye, D.; Puechmorel, S.; Delahaye, D.; Puechmorel, S. Air Traffic Complexity Versus Control Workload. In Proceedings of the EuroGNC, European Aerospace Guidance, Navigation and Control Conference 2015, Toulouse, France, 13–15 April 2015. [Google Scholar]
- Walter, L.; Pusch, M.; Holzapfel, F.; Knorr, D. Quantifying Trajectory Uncertainty Using a Sensitivity-Based Complexity Metric Component. In Proceedings of the ICRAT-2010, Budapest, Hungary, 1–4 June 2010. [Google Scholar]
- Prandini, M.; Hu, J.; Putta, V. Air Traffic Complexity in Future Air Traffic Management Systems. J. Aerosp. Oper. 2012, 1, 281–299. [Google Scholar]
- SESAR Joint Undertaking. STEP 1 Consolidation of Previous Studies; SESAR: Brussels, Belgium, 2010. [Google Scholar]
- Chybowski, L.; Gawdzińska, K. On the possibilities of applying the AHP method to multi-criteria component importance analysis of complex technical objects. New Adv. Inf. Syst. Technol. 2012, 445, 701–710. [Google Scholar]
- Chybowski, L.; Twardochleb, M.; Wiśnic, B. Multi-criteria Decision making in Components Importance Analysis applied to a Complex Marine System. Int. J. Marit. Sci. Technol. 2016, 63, 264–270. [Google Scholar]
- Korn, C.; Bernd, B. Sectorless Atm–Analysis and simulation results. In Proceedings of the 27th International Congress of the Aeronautical Sciences, Nice, France, 19–24 September 2010. [Google Scholar]
- Sanz, A.R.; Comendador, V.F.G.; Valdés, R.M.A. Uncertainty Management at the Airport Transit View. Aerospace 2018, 5, 59. [Google Scholar] [CrossRef]
- Valdes, R.M.A.; Chen, S.Z.L.; Comendador, V.F.G. Application of Bayesian Networks and Information Theory to Estimate the Occurrence of Mid-Air Collisions Based on Accident Precursors. Entropy 2018, 20, 969. [Google Scholar]
- Valdés, R.M.A.; Comendador, V.F.G.; Sanz, L.P.; Sanz, A.R. Prediction of aircraft safety incidents using Bayesian inference and hierarchical structures. Saf. Sci. 2018, 104, 216–230. [Google Scholar] [CrossRef]
- Pearl, J. Probabilistic Reasoning in Intelligent Systems; Morgan Kauffman: San Mateo, CA, USA, 1998. [Google Scholar]
- Norvig, P.; Stuart, R. Artificial Intelligence: A modern Approach, 2nd ed.; Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2003. [Google Scholar]
- Borsuk, M.E.; Stow, C.A.; Reckhow, K.H. A Bayesian network of eutrophication models for synthesis, prediction, and uncertainty analysis uncertainty analysis. Ecol. Model. 2004, 173, 219–239. [Google Scholar] [CrossRef]
- BayesFusion. GeNIe Modeler, Version 2.2; GeNIe Modeler, BayesFusion, LLC: Pittsburgh, PA, USA, 2017.
- Cooke, N. Varieties of knowledge elicitation techniques. Int. J. Hum. Comput. Stud. 1994, 41, 6801–6849. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trajectory Based Operations | |||
|---|---|---|---|
| LONG-TERM | MEDIUM-TERM | SHORT-TERM | EXECUTION PHASE |
| From 5 years up to 6 months | 6 months until one week | One week to 24 h | Day of operations |
| DATA | DATA | DATA | DATA |
| Routing Preference (historical data) and Priorities | Shared Business Trajectory (SBT) Scheduling Phase | 4D trajectory planning phase. ATM Short-term | Reference Business Trajectory (RBT) |
| Agreed performance targets for capacity and flight efficiency at network and local level | Scheduled data
| ICAO Flight Plan Data | Global Unique Flight Identifier (GUFI) |
| Existing Airspace Structure | Global Unique Flight Identifier (GUFI) | Extended FPL Data | |
| Airspace Availability/Conditions of Use | Departure runway | Real time constraints or ATC constraints | |
| Default Airspace Availability | Arrival runway | DCB measures and tolerances | |
| Identified capacity bottlenecks | DCB measures and tolerances | TSAT/TTOT | |
| Coordination of airspace design plans (local/sub-regional) | 4D Trajectory
| ||
| ANSP: Plans for local or FAB development | Nominal Preferred Route (NPR) | ||
| Airport slots | |||
| ATM Process | Time Line | Specific Processes | Description |
|---|---|---|---|
| Long Term Process | From years to 3 days | Analyze Network performance and airspace organization/configuration needs, particularly those concerned with airspace design and resources | Airspaces is designed to enable dynamic configurations to be used, and the ATM resources are made available to use the requires airspace configuration |
| Medium Term Process | From 6 month to 3 days | Collaboratively update and publish airspace configuration plan and develop an optimum airspace configuration | |
| Short Term Process | From 3 days to hours | The processes in medium and short term are broadly similar (although the data available particularly for estimated demand, within the short-term is more reliable/certain) | ANSPs make plans for airspace configurations according to the expected traffic pattern (via CDM process where appropriate). The processes in medium and short-term is that the data available within the short term process is more reliable/certain- particularly for the estimated demand) |
| Execution process | From approximately 3–4 hours before real flight through to the time that the relevant flights are airborne | Implement DCB plan with airspace configurations, coordinate airspace solution and implement airspace solution | Airspace configurations are implemented and fine-tuned if appropriate according to the running traffic pattern |
| ATM Process | Time Line | Specific Processes | Description |
|---|---|---|---|
| Long Medium Term Process | From years to 3 days | Available information will support to identify Airspace Users’ preferences; used routes, main flows and potential conflict points among others. Latest medium-term assessments based on more precise shared information can address preliminary complexity evaluation. | Uncertainty levels are higher the more time is left up to operation. That will lead to lower precision in forecasts and in complexity assessment. Unreal complexity assessment will affect decision-making and resources distribution. |
| Short Term Execution Process | From 3 days to approximately 3–4 h before real flight through to the time that the relevant flights are airborne | Within the FCA concept, it is important to detect potential conflict, even conflict about to happen in real time for Execution Phase. Apart from allocation, both complexity levels and workload will also define the best resolution performances in order to reduce their effect on surrounding traffic and the modified trajectory itself. | Information used at these stages has low uncertainty level as all trajectories, airspace structure related measures and external parameters are well known. Besides conflicts, complexity parameters will take into account more precisely complexity levels and its linked controllers’ workload, which is crucial to determinate allocations. |
| Complexity Generator | LONG | MEDIUM | SHORT |
|---|---|---|---|
| Flows distribution | H | H | H |
| Number of interaction points | H | H | H |
| Number of main flows | H | H | M |
| Presence/proximity of restricted airspace | H | H | M |
| Airspace uses | M | M | M |
| Distribution of crossing points and their proximity to airspace boundaries | L | M | M |
| Airspace volume | L | M | H |
| Airspace Geometry | L | M | H |
| Altitude AC distribution | M | M | H |
| Speed AC distribution | L | L | H |
| Altitude AC changes | L | M | H |
| Occupancy | H | H | H |
| Traffic Entry | H | H | H |
| Distribution of flight time per aircraft under ATCO responsibility in the given timeframe | H | H | H |
| Number of conflicts predicted | L | M | H |
| Time difference at crossing points | L | M | H |
| Vertical and horizontal convergence | L | M | H |
| Coordination procedures | L | L | M |
| Vectoring and operational restrictions | L | M | H |
| Transition and changes in configuration | L | H | H |
| Degrees of freedom of the controller in the resolution strategy of the conflict | L | L | H |
| CDR Support and monitoring System | L | M | H |
| Coordination support tools | L | M | H |
| System failure | L | M | H |
| Weather conditions | L | H | H |
| Complexity Generator | LONG | MEDIUM | SHORT |
|---|---|---|---|
| Flows distribution | Demand forecast ANSP: Plans for local or FAB development | More granularity and more accurate and update data | 4D Trajectory ICAO Flight Plan Data Extended FPL Data |
| Number of interaction points | Parameters such as flight level are not included in demand forecast | Airports slots and aircraft type are defined. More granularity in required parameters | Real time constraints Climb/Descent performance profile |
| Number of main flows | Demand forecast ANSP: Plans for local or FAB development | More granularity and more accurate and update data | 4D Trajectory ICAO Flight Plan Data Extended FPL Data |
| Presence/proximity of restricted airspace | Military Airspace Requirements, it needs to be coordinated | Temporary Airspace Reorganisation. Revised Airspace Structure | Actual situation and knowledge of Airspace Users’ needs |
| Airspace uses | Demand forecast ANSP: Plans for local or FAB development | More granularity and more accurate and update data | Extended FPL data |
| Distribution of crossing points and their proximity to airspace boundaries | Demand forecast ANSP: Plans for local or FAB development | More granularity and more accurate and update data | 4D Trajectory ICAO Flight Plan Data Extended FPL Data |
| Airspace volume | Uncertainty of suitable configuration | Updated data. Less uncertainty of suitable configuration | Available data |
| Airspace Geometry | Uncertainty of suitable configuration | Updated data. Less uncertainty of suitable configuration | Available data |
| Altitude AC distribution | Analysis of flows not specific trajectories | Schedule data (aircraft type, ADES, ADEP) | Extended FPL data |
| Speed AC distribution | Analysis of flows, not specific trajectories | Schedule data (aircraft type, ADES, ADEP) | Extended FPL data |
| Altitude AC changes | Analysis of flows, not specific trajectories | Airports slots and aircraft type are defined. More granularity in required parameters | Extended FPL data |
| Occupancy | Demand forecast. Uncertainty of suitable configuration ANSP: Plans for local or FAB development | More granularity in required parameters. Less uncertainty of suitable configuration | Extended FPL data Available data |
| Traffic Entry | Demand forecast. Uncertainty of suitable configuration ANSP: Plans for local or FAB development | More granularity in required parameters. Less uncertainty of suitable configuration | Extended FPL data Available data |
| Distribution of flight time per aircraft under ATCO responsibility in the given timeframe | Demand forecast. Uncertainty of suitable configuration ANSP: Plans for local or FAB development | More granularity in required parameters. Less uncertainty of suitable configuration | Extended FPL data Available data |
| Number of conflicts predicted | Predictions based on flows | Seasonal schedule Temporary Airspace Reorganisation | Extended FPL data Uncertainty of wind direction |
| Time difference at crossing points | Predictions based on flows | Seasonal schedule Temporary Airspace Reorganisation | Extended FPL data Uncertainty of wind direction |
| Vertical and horizontal convergence | Demand forecast ANSP: Plans for local or FAB development | More granularity and more accurate and update data | 4D Trajectory ICAO Flight Plan Data Extended FPL Data |
| Coordination procedures | Analysis of the collateral sector, uncertainty of the adopted configuration | Updated data | Available data and procedures |
| Complexity Generator | Code | Complexity Generator | Code |
|---|---|---|---|
| Flows distribution | FD | Distribution of flight time per aircraft under ATCO responsibility in the given timeframe | FT |
| Number of interaction points | IP | Number of conflicts predicted | NC |
| Number of main flows | MF | Time difference at crossing points | TD |
| Presence/proximity of restricted airspace | RA | Vertical and horizontal convergence | VHC |
| Airspace uses | AU | Coordination procedures | CoP |
| Distribution of crossing points and their proximity to airspace boundaries | CrP | Vectoring and operational restrictions | VR |
| Airspace volume | AV | Transition and changes in configuration | TC |
| Airspace Geometry | AG | Degrees of freedom of the controller in the resolution strategy of the conflict | DF |
| Altitude AC distribution | AD | CDR Support and monitoring System | CDR |
| Speed AC distribution | SD | Coordination support tools | CST |
| Altitude AC changes | AC | System failure | SF |
| Occupancy (per ATCO position) | OC | Weather conditions | WC |
| Traffic Entry (per ATCO position) | TE |
| Time Horizon | DAC Recommendation | FCA Recommendation) |
|---|---|---|
| Long Term |
|
|
| Medium Term |
|
|
| Short Term |
|
|
| METRIC | DAC | FCA | ||||
|---|---|---|---|---|---|---|
| Long Term | Medium Term | Short Term | Long Term | Medium Term | Short Term | |
| TBX | ||||||
| INPUT-OUTPUT | ||||||
| PROBABILISTIC APPROACH | ||||||
| GEOMETRIC APPROACH | ||||||
| DYNAMIC SYSTEM APPROACH | ||||||
| DYNAMIC DENSITY | ||||||
| PHARE | ||||||
| TRAJECTORY UNCERTAINTY | ||||||
| SOLUTION SPACE | ||||||
| TRAJECTORY FLEXIBILITY | ||||||
| FRACTAL | ||||||
| ALGORITHM EUROCONTROL | ||||||
| COGNITIVE | ||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gomez Comendador, V.F.; Arnaldo Valdés, R.M.; Vidosavljevic, A.; Sanchez Cidoncha, M.; Zheng, S. Impact of Trajectories’ Uncertainty in Existing ATC Complexity Methodologies and Metrics for DAC and FCA SESAR Concepts. Energies 2019, 12, 1559. https://doi.org/10.3390/en12081559
Gomez Comendador VF, Arnaldo Valdés RM, Vidosavljevic A, Sanchez Cidoncha M, Zheng S. Impact of Trajectories’ Uncertainty in Existing ATC Complexity Methodologies and Metrics for DAC and FCA SESAR Concepts. Energies. 2019; 12(8):1559. https://doi.org/10.3390/en12081559
Chicago/Turabian StyleGomez Comendador, Victor Fernando, Rosa María Arnaldo Valdés, Andrija Vidosavljevic, Marta Sanchez Cidoncha, and Shutao Zheng. 2019. "Impact of Trajectories’ Uncertainty in Existing ATC Complexity Methodologies and Metrics for DAC and FCA SESAR Concepts" Energies 12, no. 8: 1559. https://doi.org/10.3390/en12081559
APA StyleGomez Comendador, V. F., Arnaldo Valdés, R. M., Vidosavljevic, A., Sanchez Cidoncha, M., & Zheng, S. (2019). Impact of Trajectories’ Uncertainty in Existing ATC Complexity Methodologies and Metrics for DAC and FCA SESAR Concepts. Energies, 12(8), 1559. https://doi.org/10.3390/en12081559