Hybrid TOA Trilateration Algorithm Based on Line Intersection and Comparison Approach of Intersection Distances †




Abstract
:1. Introduction
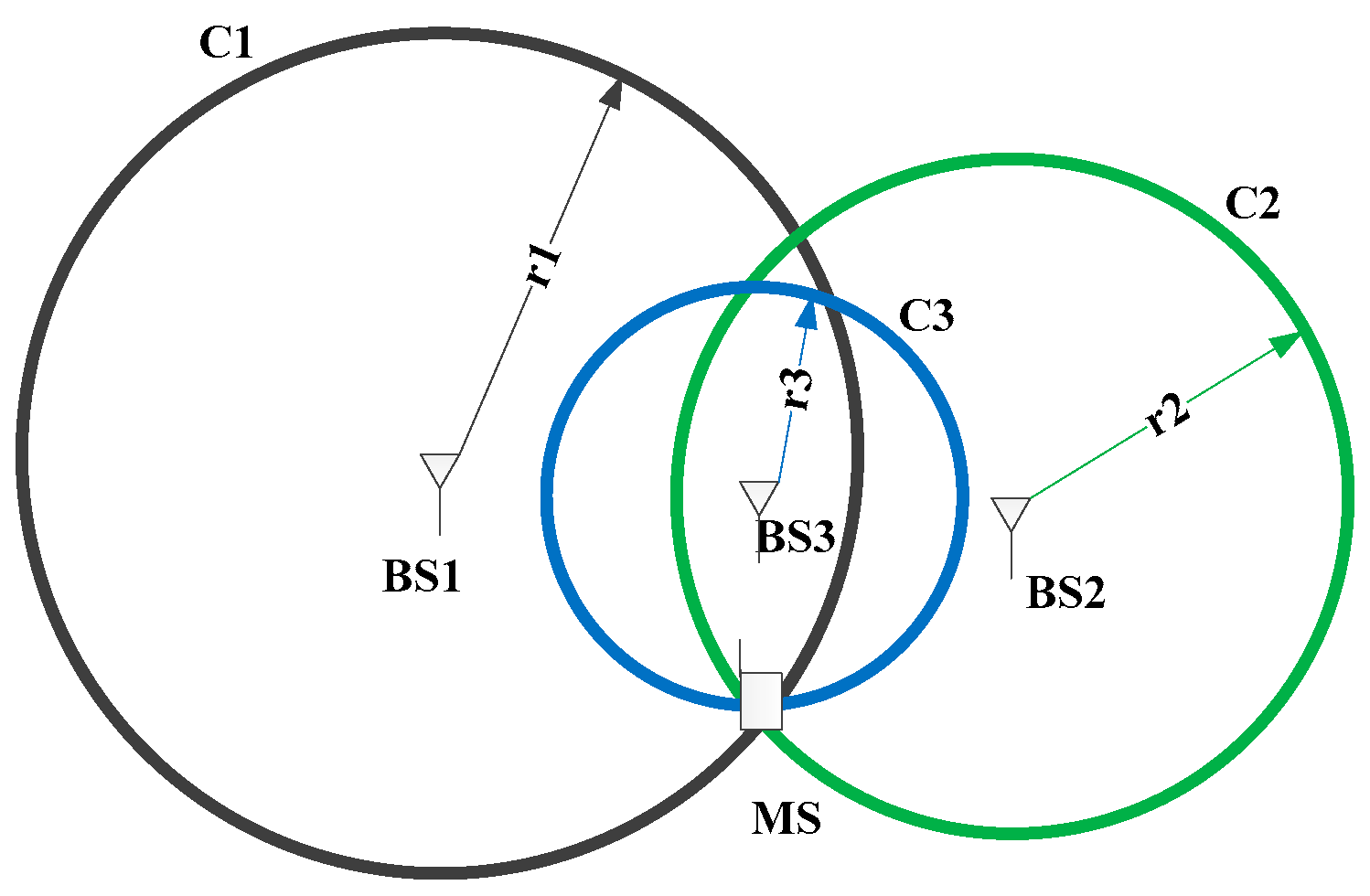
2. Problem Formulation for TOA Trilateration
3. Advanced TOA Trilateration Algorithms
3.1. Line Intersection Algorithm
3.2. Comparison Approach of Intersection Distances
3.3. Performance Analysis between Two Advanced TOA Trilateration Algorithms
4. Hybrid Approach Based on Advanced TOA Algorithms
4.1. Hybrid Algorithm
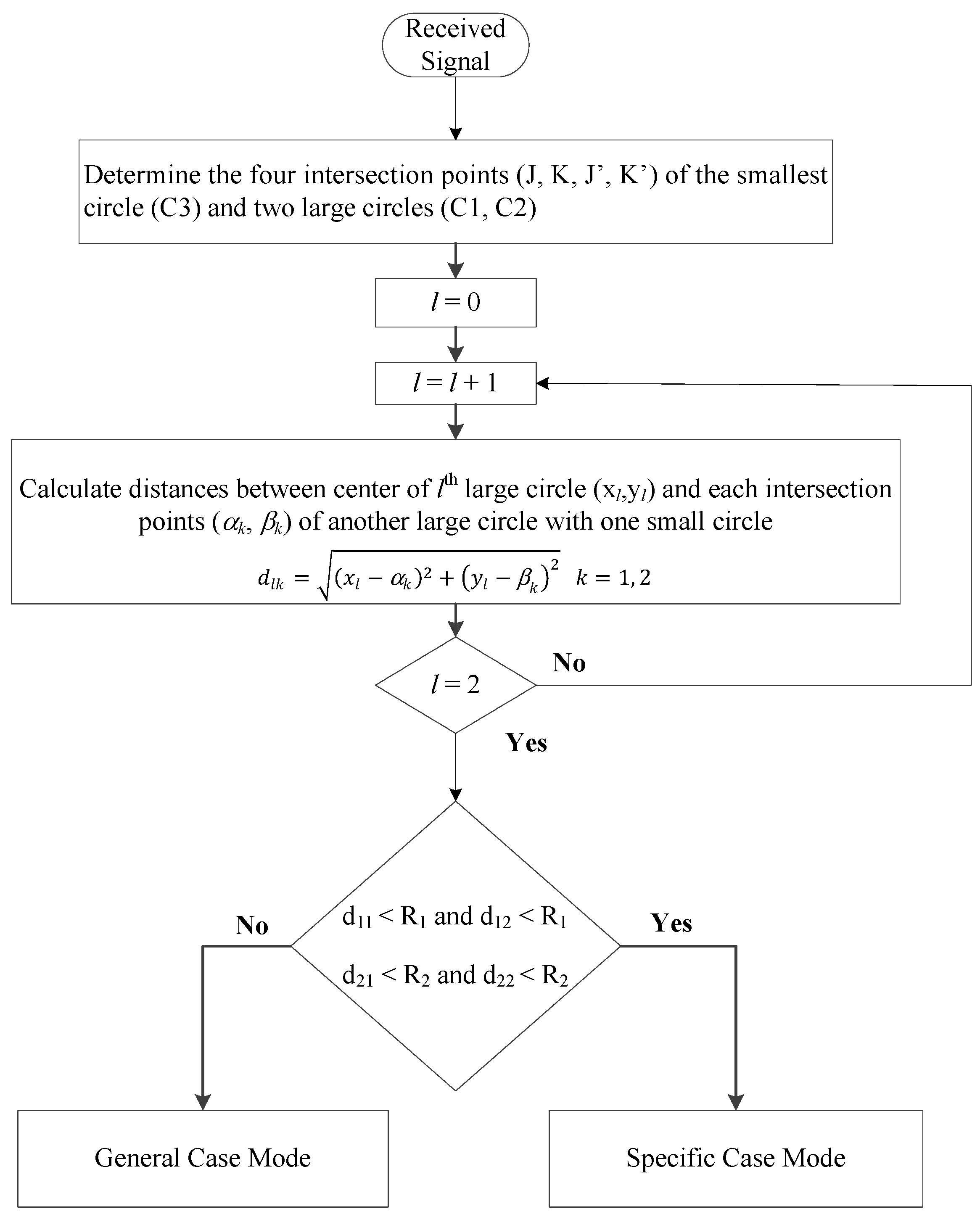
4.2. Mode Selection Algorithm
5. Computer Simulations
5.1. Simulation Scenarios
- First set:
- General case: three BSs with coordinates of (−1000, 5000), (6000, −3000), and (−7000, 600).
- Specific case: three BSs with coordinates of (−1000, 4000), (1000, 2000), and (5000, 700).
- Second set:
- General case: three BSs with coordinates of (−1000, 4500), (6000, −2000), and (−7000, 500).
- Specific case: three BSs with coordinates of (−1000, 5000), (1500, 3000), and (7000, 600).
- First scenario: 90% general case and 10% specific case.
- Second scenario: 95% general case and 5% specific case.
- Third scenario: 99% general case and 1% specific case.
5.2. Error Model for Performance Evaluation
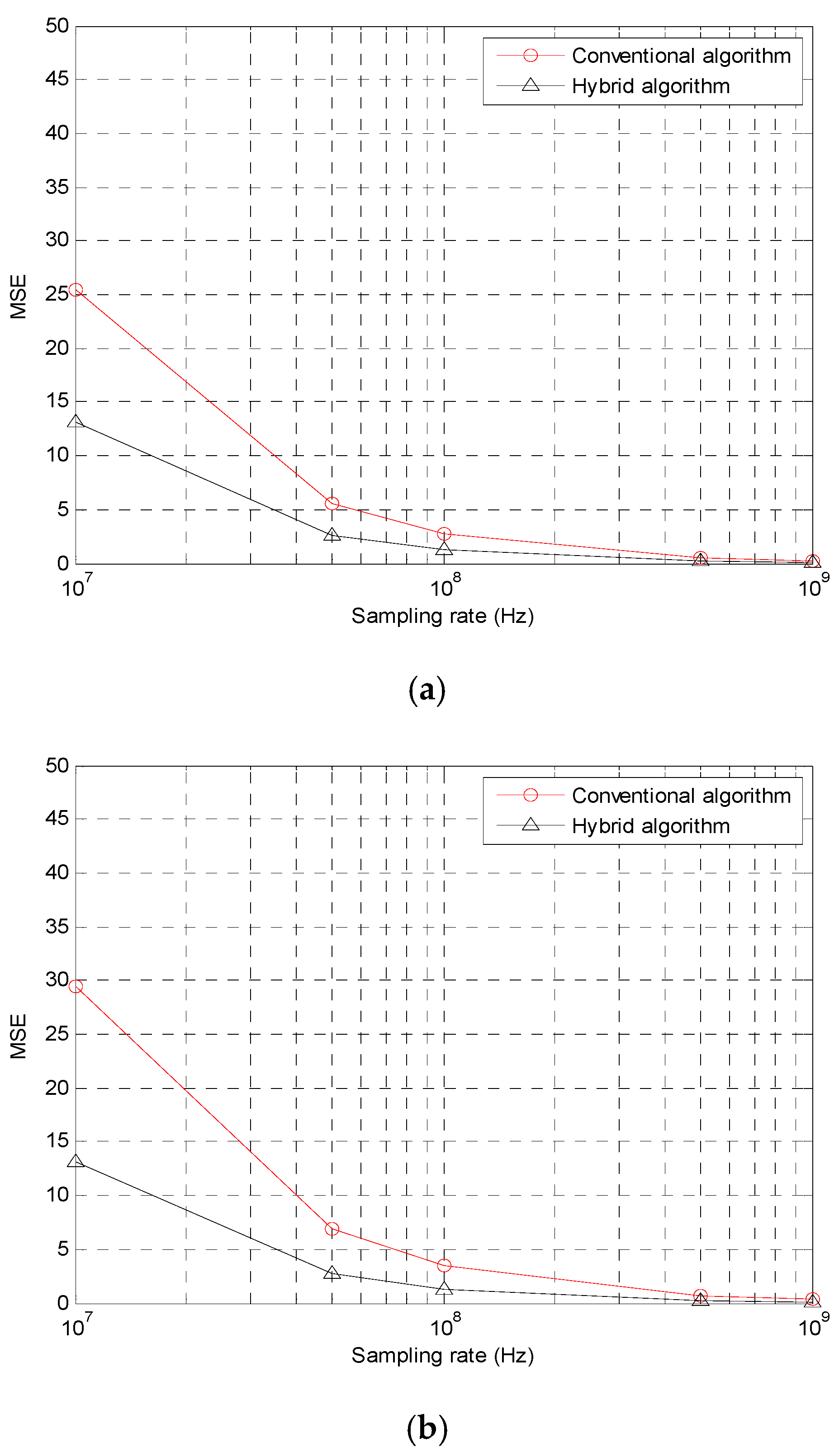
5.3. Simulation Results
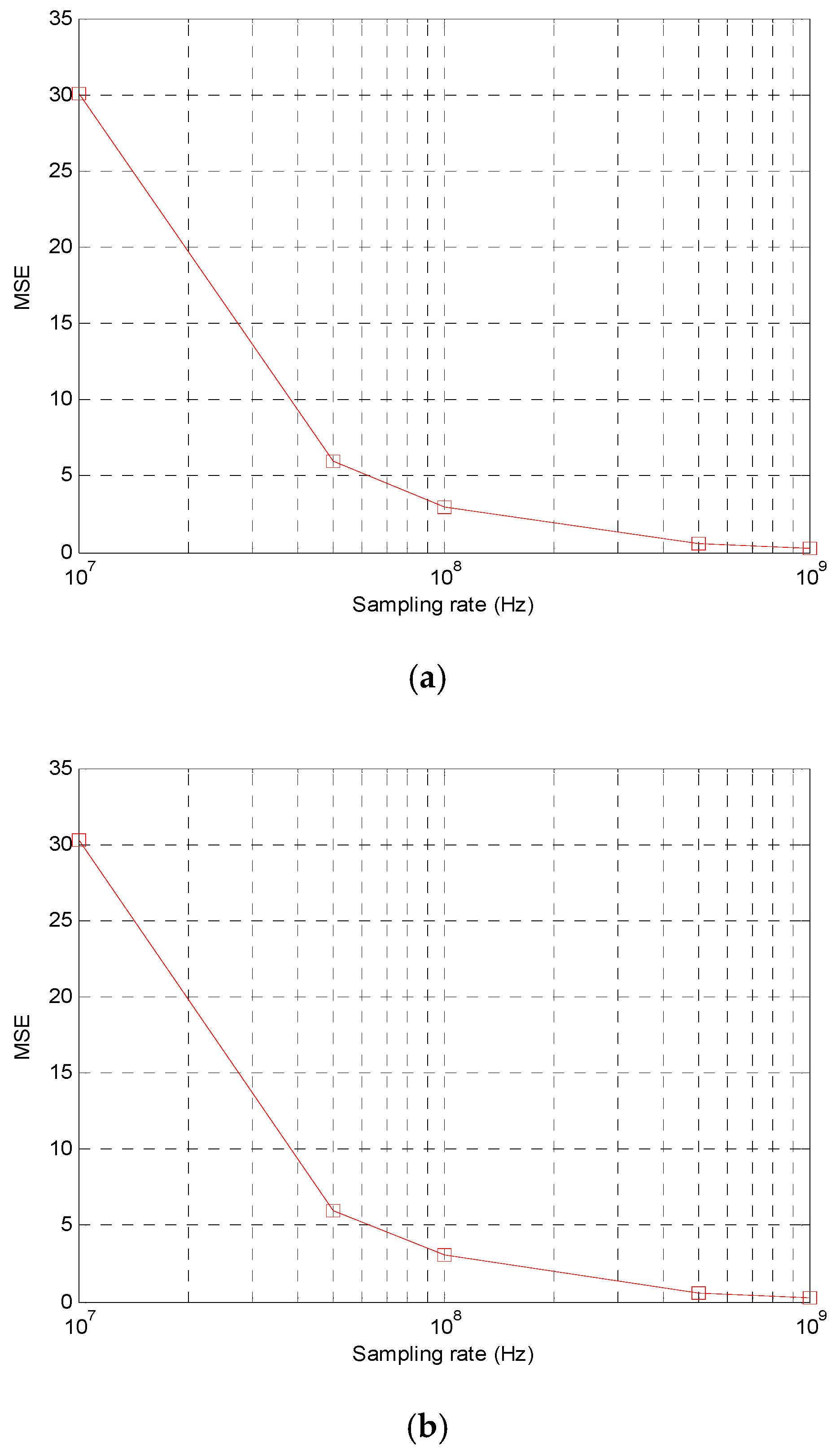
5.3.1. Simulation Results for the First Set
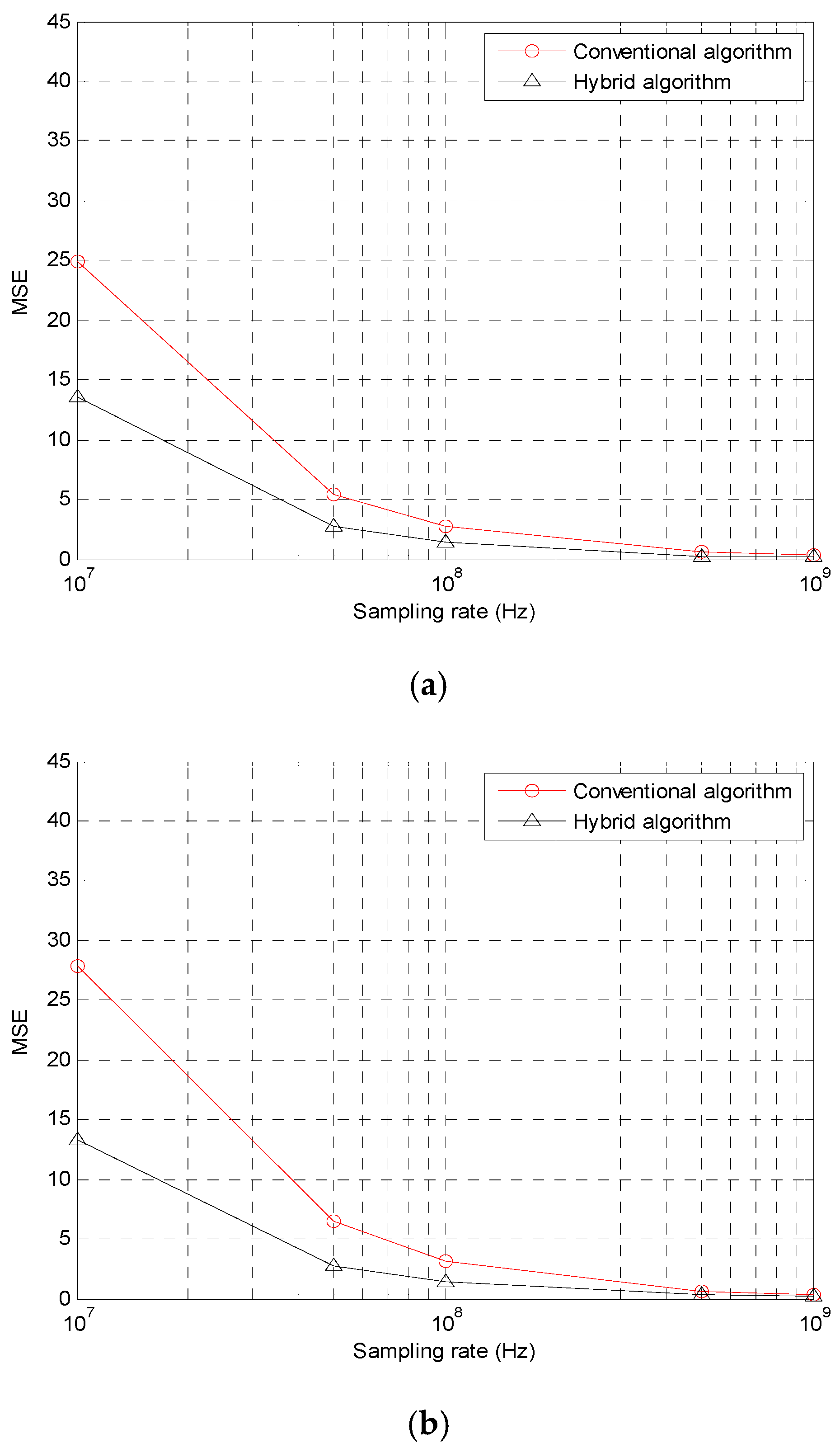
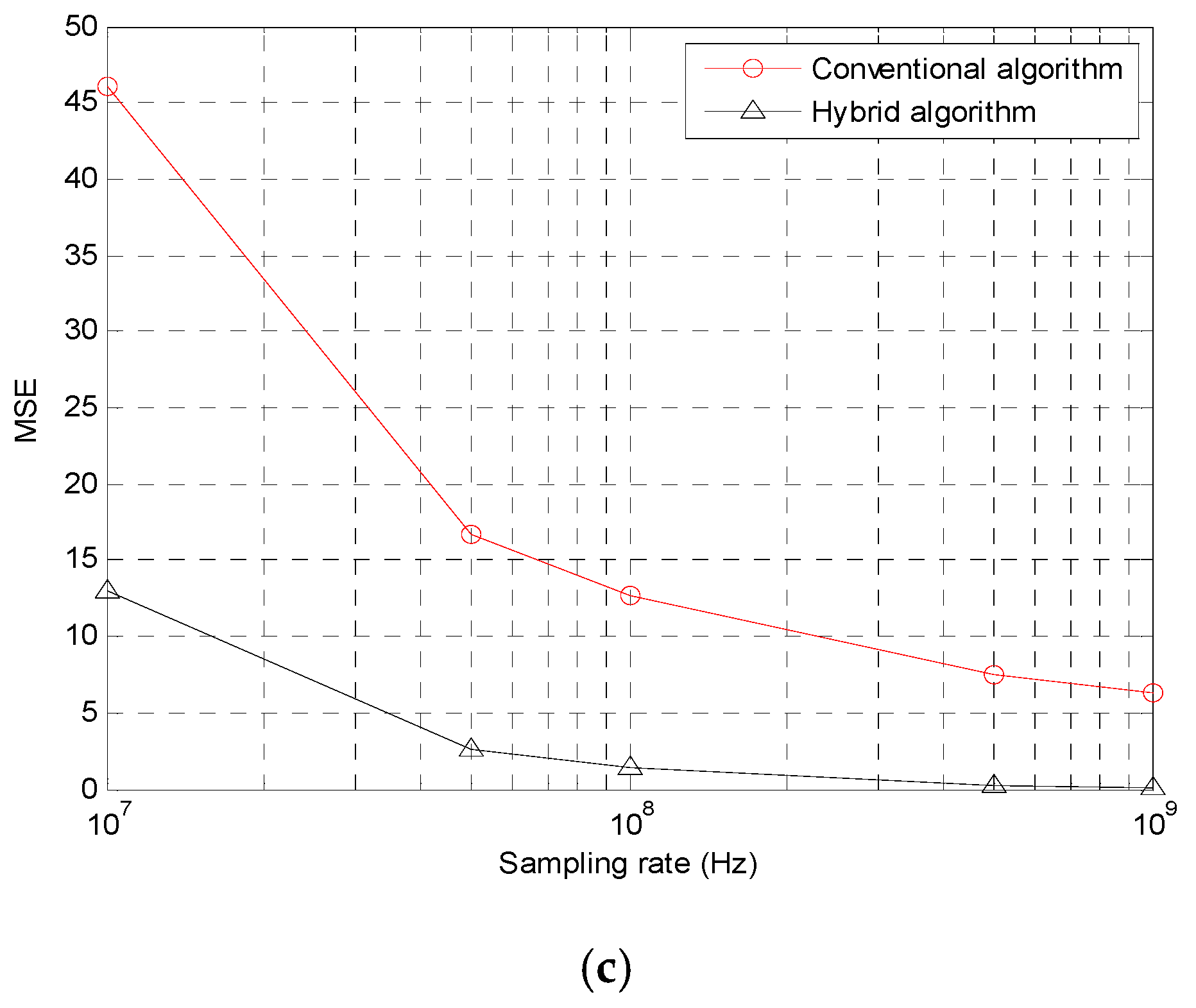
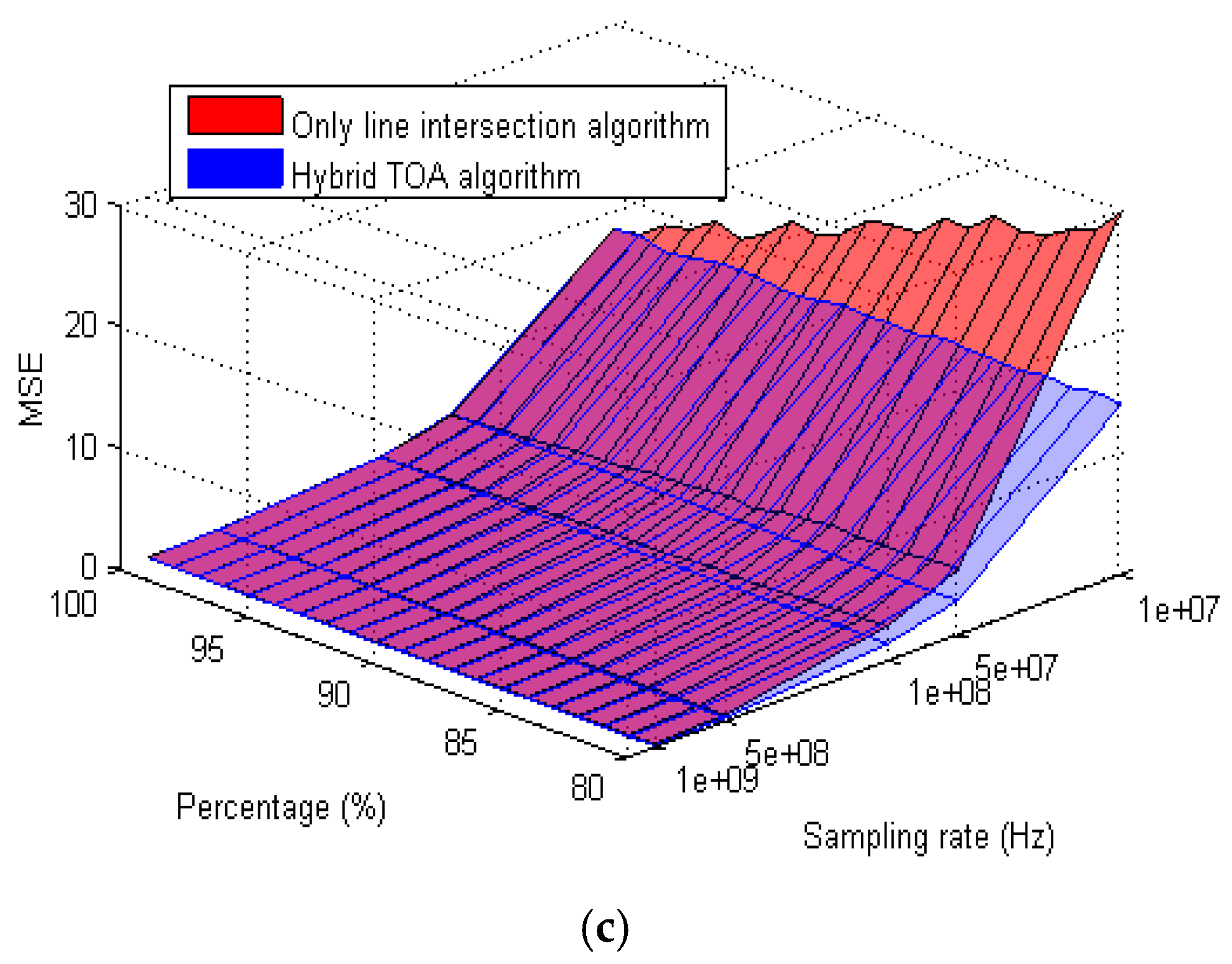
5.3.2. Simulation Results for the Second Set
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Nomenclature
| MS | mobile station |
| IoT | Internet of Things |
| TOA | time of arrival |
| BS | base station |
| GPRS | General packet radio service |
| LBS | location-based service |
| GNSS | Global Navigation Satellite System |
| RF | radio frequency |
| WLAN | wireless local area network |
| UWB | Ultra-wideband |
| GPS | Global Positioning System |
| RSS | received signal strength |
| TDOA | time difference of arrival |
| AOA | angle of arrival |
| true distance between MS and th BS | |
| true coordinate of MS | |
| coordinate of th BS | |
| number of delay samples | |
| round up function | |
| speed of light | |
| sampling rate | |
| estimated distance between MS and th BS | |
| estimated MS using line intersection algorithm | |
| estimated MS using comparison approach of intersection distances | |
| coordinate of the center of the th large circle | |
| coordinates of the th intersection point of the small circle with another large circle | |
| m | meter |
| MHz | megahertz |
| GHz | gigahertz |
| MSE | mean square error |
| NLOS | non-line-of-sight |
References
- Whitmore, A.; Agarwal, A.; Da Xu, L. The Internet of Things—A survey of topics and trends. Inf. Syst. Front. 2015, 17, 261–274. [Google Scholar] [CrossRef]
- Koh, J.Y.; Nevat, I.; Leong, D.; Wong, W. Geo-Spatial Location Spoofing Detection for Internet of Things. IEEE Int. Things J. 2016, 3, 971–978. [Google Scholar] [CrossRef]
- Drane, C.; Macnaughtan, M.; Scott, C. Positioning GSM telephones. IEEE Commun. Mag. 1998, 36, 46–54. [Google Scholar] [CrossRef]
- Mokbel, M.F. Privacy in Location-Based Services: State-of-the-Art and Research Directions. In Proceedings of the 2007 International Conference on Mobile Data Management, Mannheim, Germany, 1 May 2007; p. 228. [Google Scholar]
- Yilin, Z. Standardization of mobile phone positioning for 3G systems. IEEE Commun. Mag. 2002, 40, 108–116. [Google Scholar] [CrossRef]
- Caffery, J.J. Wireless Location in CDMA Cellular Radio Systems; Kluwer Academic: Boston, MA, USA, 2000. [Google Scholar]
- Koshima, H.; Hoshen, J. Personal locator services emerge. IEEE Spectr. 2000, 37, 41–48. [Google Scholar] [CrossRef]
- Küpper, A. Location-Based Services: Fundamentals and Operation; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Rappaport, T.S.; Reed, J.H.; Woerner, B.D. Position location using wireless communications on highways of the future. IEEE Commun. Mag. 1996, 34, 33–41. [Google Scholar] [CrossRef]
- Zekavat, R.; Buehrer, R.M. Handbook of Position Location: Theory, Practice and Advances; Wiley-IEEE Press: Hoboken, NJ, USA, 2011; p. 1264. [Google Scholar]
- Prasithsangaree, P.; Krishnamurthy, P.; Chrysanthis, P.K. On Indoor Position Location with Wireless LANs. In Proceedings of the PImRc, Pavilhao Atlantico, Lisboa, Portugal, 18 September 2002; pp. 720–724. [Google Scholar]
- Misra, P.; Enge, P. Special issue on global positioning system. Proc. IEEE 1999, 87, 3–15. [Google Scholar]
- Shen, J.; Molisch, A.F.; Salmi, J. Accurate passive location estimation using TOA measurements. IEEE Trans. Wirel. Commun. 2012, 11, 2182–2192. [Google Scholar] [CrossRef]
- Saloranta, J.; Abreu, G. Solving the Fast Moving Vehicle Localization Problem Via TDOA Algorithms. In Proceedings of the 2011 8th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 7–8 April 2011; pp. 127–130. [Google Scholar]
- Dakkak, M.; Nakib, A.; Daachi, B.; Siarry, P.; Lemoine, J. Indoor localization method based on RTT and AOA using coordinates clustering. Comput. Netw. 2011, 55, 1794–1803. [Google Scholar] [CrossRef]
- Kyriazakos, S.; Drakoulis, D.; Theologou, M.; Sanchez-P., J.A. Localization of Mobile Terminals, Based on a Hybrid Satellite-Assisted and Network-Based Techniques. In Proceedings of the 2000 IEEE Wireless Communications and Networking Conference. Conference Record (Cat. No.00TH8540), Chicago, IL, USA, 23–28 September 2000; Volume 792, pp. 798–802. [Google Scholar]
- Soliman, S.; Agashe, P.; Fernandez, I.; Vayanos, A.; Gaal, P.; Oljaca, M. gpsOne/sup TM/: A Hybrid Position Location System. In Proceedings of the 2000 IEEE Sixth International Symposium on Spread Spectrum Techniques and Applications, ISSTA 2000, Proceedings (Cat. No.00TH8536), Parsippany, NJ, USA, 6–8 September 2000; Volume 331, pp. 330–335. [Google Scholar]
- Gentile, C.; Alsindi, N.; Raulefs, R.; Teolis, C. Geolocation Techniques: Principles and Applications; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Deng, P.; Fan, P.Z. An AOA Assisted TOA Positioning System. In Proceedings of the International Conference on Communication Technology (Cat. No.00EX420), Beijing, China, 21–25 August 2000; pp. 1501–1504. [Google Scholar]
- Kleine-Ostmann, T.; Bell, A.E. A data fusion architecture for enhanced position estimation in wireless networks. IEEE Commun. Lett. 2001, 5, 343–345. [Google Scholar] [CrossRef]
- Thomas, N.J.; Cruickshank, D.G.M.; Laurenson, D.I. Performance of a TDOA-AOA Hybrid Mobile Location System. In Proceedings of the Second International Conference on 3G Mobile Communication Technologies, London, UK, 26–28 March 2001; pp. 216–220. [Google Scholar]
- Li, C.; Weihua, Z. Hybrid TDOA/AOA mobile user location for wideband CDMA cellular systems. IEEE Trans. Wirel. Commun. 2002, 1, 439–447. [Google Scholar] [Green Version]
- Tovar, B.; Murrieta-Cid, R.; LaValle, S.M. Distance-Optimal Navigation in an Unknown Environment Without Sensing Distances. IEEE Trans. Robot. 2007, 23, 506–518. [Google Scholar] [CrossRef] [Green Version]
- Pradhan, S.; Hwang, S.; Cha, H.-R.; Bae, Y.-C. Line Intersection Algorithm for the Enhanced TOA Trilateration Technique. Int. J. Hum. Robot. 2014, 11, 1442003. [Google Scholar] [CrossRef]
- Hwang, S.; Pradhan, S. Comparison Approach of Intersection Distances for Advanced TOA Trilateration. Int. J. Hum. Robot. 2017, 14, 1750019. [Google Scholar] [CrossRef]
- Pradhan, S.; Shin, S.; Kwon, G.R.; Pyun, J.Y.; Hwang, S. The Advanced TOA Trilateration Algorithms with Performance Analysis. In Proceedings of the 2016 50th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 6–9 November 2016; pp. 923–928. [Google Scholar]
- Pradhan, S.; Hwang, S. Mode Selection Algorithm for Advanced TOA Trilateration Techniques. In Proceedings of the Eighth International Conference on Advances in Satellite and Space Communications (SPACOMM 2016), Lisbon, Portugal, 21–25 February 2016; pp. 18–22. [Google Scholar]
- Caffery, J.J. A New Approach to the Geometry of TOA Location. In Proceedings of the 52nd Vehicular Technology Conference Vehicular Technology Conference Fall 2000, IEEE VTS Fall VTC2000, (Cat. No.00CH37152), Boston, MA, USA, 24–28 September 2000; Volume 1944, pp. 1943–1949. [Google Scholar]
- Munoz, D.; Lara, F.B.; Vargas, C.; Enriquez-Caldera, R. Position Location Techniques and Applications; Elsevier Science: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Gezici, S. A Survey on Wireless Position Estimation. Wirel. Pers. Commun. 2008, 44, 263–282. [Google Scholar] [CrossRef]
- Doukhnitch, E.; Salamah, M.; Ozen, E. An efficient approach for trilateration in 3D positioning. Comput. Commun. 2008, 31, 4124–4129. [Google Scholar] [CrossRef]
- Izquierdo, F.; Ciurana, M.; Barcelo, F.; Paradells, J.; Zola, E. Performance evaluation of a TOA-based trilateration method to locate terminals in WLAN. In Proceedings of the 2006 1st International Symposium on Wireless Pervasive Computing, Phuket, Thailand, 16–18 January 2006; pp. 1–6. [Google Scholar]
- Hussain, S.A.; Emran, M.; Salman, M.; Shakeel, U.; Naeem, M.; Ahmed, S.; Azeem, M. Positioning a Mobile Subscriber in a Cellular Network System based on Signal Strength. IAENG Int. J. Comput. Sci. 2007, 34. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
|
|
|
b. Otherwise ☞ General mode (employing line intersection algorithm) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pradhan, S.; Bae, Y.; Pyun, J.-Y.; Ko, N.Y.; Hwang, S.-s. Hybrid TOA Trilateration Algorithm Based on Line Intersection and Comparison Approach of Intersection Distances. Energies 2019, 12, 1668. https://doi.org/10.3390/en12091668
Pradhan S, Bae Y, Pyun J-Y, Ko NY, Hwang S-s. Hybrid TOA Trilateration Algorithm Based on Line Intersection and Comparison Approach of Intersection Distances. Energies. 2019; 12(9):1668. https://doi.org/10.3390/en12091668
Chicago/Turabian StylePradhan, Sajina, Youngchul Bae, Jae-Young Pyun, Nak Yong Ko, and Suk-seung Hwang. 2019. "Hybrid TOA Trilateration Algorithm Based on Line Intersection and Comparison Approach of Intersection Distances" Energies 12, no. 9: 1668. https://doi.org/10.3390/en12091668
APA StylePradhan, S., Bae, Y., Pyun, J. -Y., Ko, N. Y., & Hwang, S. -s. (2019). Hybrid TOA Trilateration Algorithm Based on Line Intersection and Comparison Approach of Intersection Distances. Energies, 12(9), 1668. https://doi.org/10.3390/en12091668